Изобретение относится к оборудованию, образованному роботом и содержащему множество механизмов, которые могут быть приведены в движение снаружи относительно робота и посредством единого ключа, позволяющего привести в действие каждый из механизмов робота. Изобретение находит особенное применение при техническом обслуживании и транспортировке человекоподобного робота.
Интеллектуальная робототехника стремится аккумулировать в машине наибольшее количество характеристик, присущих человеку. В первую очередь отмечается стремление получить сходство с живым существом во внешнем виде, телосложении или в манере двигаться. Человекоподобный робот содержит, как правило, множество моторизованных шарниров, способных приводить в движение посредством, по меньшей мере, одного электрического двигателя один конструктивный элемент относительно другого. Наиболее разработанные человекоподобные роботы содержат, таким образом, ноги, руки или кисти. Они способны ходить или танцевать подобно человеку. Они могут перемещать в своих кистях предметы, имеющие различные формы. Также отмечается стремление приблизиться к живому существу по его поведению и интеллекту. Искусственный интеллект роботов становится все более и более удовлетворительным, позволяя осуществлять все более и более сложное взаимодействие с человеком-пользователем.
Существует множество возможных применений человекоподобных роботов. Рассматривалось применение в промышленном секторе, например, для обеспечения доступа в зоны заражения, где существует опасность для жизни человека. Рассматриваются также многочисленные варианты применения в области здравоохранения, например, для оказания помощи людям с ограниченными возможностями. Рассматривается также применение для широких слоев населения в быту.
Предположение распространения в больших масштабах и предназначение для самых широких слоев населения приводят к возникновению новых обязательных требования, например, производственного, нормативного характера или в плане безопасности. Разработка самых последних поколений роботов уже сейчас включает в себя совокупность требований для обеспечения соответствия находящихся в стадии активного формирования нормативных документов. Например, робот, предназначенный для широких слоев населения, не должен представлять никакой опасности как в случае штатного функционирования, так и в случае возникновения поломки. Техническое обслуживание должно производиться как опытным оператором, так и простым пользователем. Прослеживается стремление учитывать при разработке робота обязательные требования, связанные с послепродажным периодом, например, для того, чтобы позволить осуществлять простую и быструю диагностику. Также должна быть обеспечена возможность перевозки робота, например, из места его изготовления в место эксплуатации, без его повреждения с учетом необходимости выдерживания механических напряжений или напряжений вибрации.
В связи с этим технической задачей изобретения является оборудование, содержащее ключ и человекоподобного робота, содержащего множество механизмов, приводимых в действие снаружи относительно робота, отличающееся тем, что каждый из механизмов содержит соединительный интерфейс, в который может быть вставлен ключ; причем соединительный интерфейс каждого из механизмов выполнен таким образом, что введение ключа приводит в действие механизм.
Согласно особенному техническому решению оборудования:
ключ содержит два продолговатых стержня, оси которых по существу параллельны друг другу;
соединительный интерфейс каждого из механизмов содержит два трубчатых отверстия, оси которых по существу параллельны друг другу, созданных для того, чтобы позволить осуществлять одновременное введение двух стержней ключа в два отверстия для приведения в действие механизма.
Стержни и отверстия имеют симметричную конфигурацию для того, чтобы каждый стержень мог быть введен в одно или другое из двух отверстий.
Предпочтительно, одним из механизмов является внешний съемный корпус, удерживаемый на роботе клипсой; причем соединительный интерфейс корпуса выполнен таким образом, что введение стержней в отверстия приводит к перемещению деформируемого конструктивного элемента клипсы, освобождая корпус робота.
Согласно особенному техническому решению оборудования:
стержни ключа на своих концах имеют скос;
- клипса содержит боковой деформируемый конструктивный элемент и осевой деформируемый конструктивный элемент;
соединительный интерфейс корпуса выполнен таким образом, что скос стержня перемещает боковой деформируемый элемент, затем осевой деформируемый конструктивный элемент во время введения ключа в соединительный интерфейс.
Предпочтительно, одним из механизмов является моторизованный шарнир, содержащий тормозное устройство, разработанное для удерживания в положении шарнира в результате пружинящего действия; причем соединительный интерфейс шарнира выполнен таким образом, что введение одного стержня в трубчатое отверстие приводит к перемещению тормозного устройства, противодействуя пружинящему действию, освобождая от удерживания в заданном положении шарнира.
Согласно особенному техническому решению оборудования:
- стержни ключа на своих концах имеют скос;
- тормозное устройство содержит наклонную плоскость; и
- соединительный интерфейс шарнира выполнен таким образом, что скос стержня вступает в контакт с наклонной плоскостью во время введения ключа в соединительный интерфейс для направления усилия, оказываемого по оси введения ключа, параллельной осям отверстий, к оси перемещения тормозного устройства.
Согласно особенному техническому решению оборудования:
- стержни ключа содержат канавку и
- соединительный интерфейс содержит выступ, имеющий конфигурацию для обеспечения взаимодействия с канавкой стержня, когда ключ вставлен, для того, чтобы удерживать в положении ключ, вставленный в соединительный интерфейс, до пороговой величины предварительно заданного усилия; причем выступ деформируется таким образом, чтобы освободить канавку выступа, когда к ключу прилагается усилие по извлечению, превышающее предварительно заданную пороговую величину.
Предпочтительно, поперечное сечение стержней и отверстий является яйцевидным.
Предпочтительно, стержни выполнены из материала на базе алюминия.
Предпочтительно, ключ содержит центральную часть, соединяющую два стержня и снабженную отверстием, предназначенным для облегчения захвата ключа.
Предпочтительно, центральная часть ключа выполнена из материала на силиконовой основе.
Изобретение будет лучше понятно, а другие преимущества проявятся во время изучения детального описания способа практического осуществления, приведенного в качестве примера, со ссылкой на фигуры чертежа, на которых:
- фиг.1a и 1b изображают два примера человекоподобных роботов, содержащих множество механизмов, которые могут приводиться в действие посредством ключа согласно изобретению;
- фиг.2a и 2b изображают пример моторизованного шарнира, содержащего тормозное устройство, которое может быть разблокировано ключом согласно изобретению;
- фиг.3 изображает в трех видах пример ключа, согласно изобретению, для человекоподобного робота;
- фиг.4a и 4b изображают ключ согласно первому осуществлению изобретения, позволяющему освобождать внешний съемный корпус, установленный на голове человекоподобного робота;
- фиг.5 изображает ключ согласно второму осуществлению изобретения, позволяющему разблокировать тормозное устройство моторизованного шарнира человекоподобного робота;
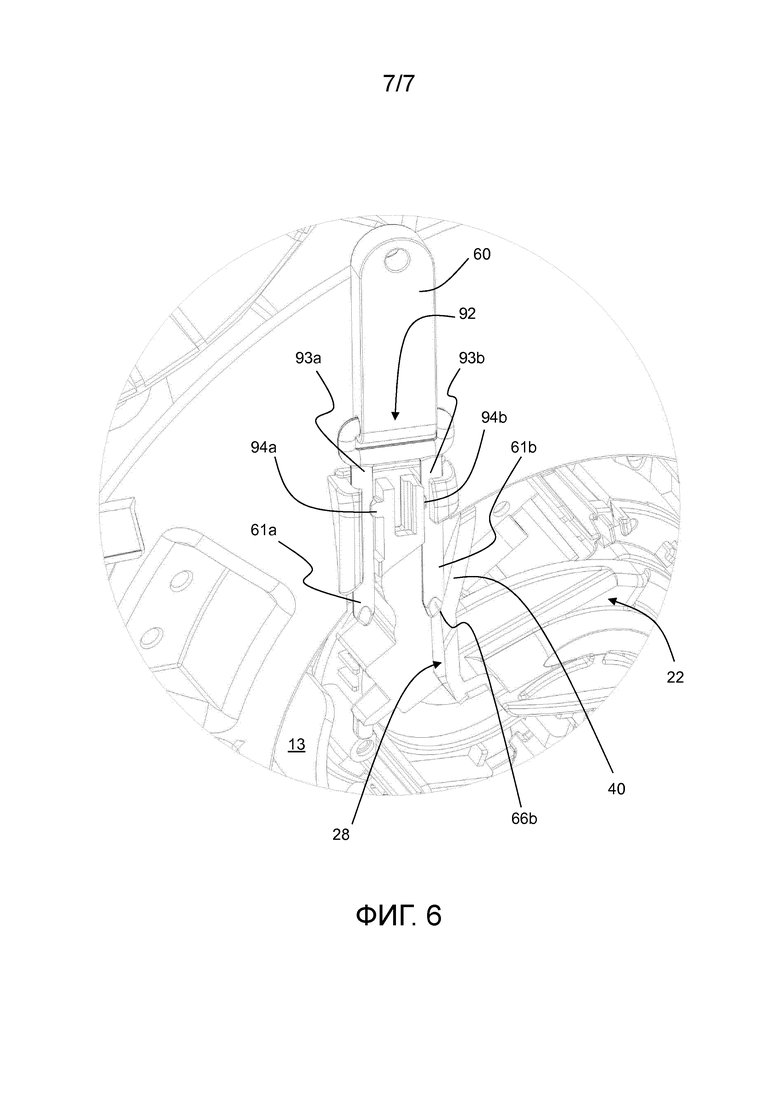
- фиг.6 изображает ключ согласно третьему осуществлению изобретения, позволяющему разблокировать тормозное устройство моторизованного шарнира человекоподобного робота.
Для большей ясности одни и те же конструктивные элементы на различных фигурах чертежа будут иметь одни и те же цифровые позиции.
На фиг.1a и 1b изображены два примера человекоподобных роботов, разработанных компанией ALDEBARAN ROBOTICSTM. Человекоподобный робот 10, изображенный на фиг.1а, содержит голову 1, туловище 2, две руки 3, две кисти 4, две ноги 5 и две ступни 6. Человекоподобный робот 10', изображенный на фиг.1b, содержит голову 1, туловище 2, две руки 3, две кисти 4 и юбку 7. Эти два робота содержат множество шарниров, позволяющих осуществлять относительное перемещение различных конструктивных элементов робота для воспроизводства особенностей строения человеческого тела и его движений. Роботы 10 и 10' содержат, например, шарнир 11 между туловищем 2 и каждой рукой 3. Шарнир 11 оснащен двигателем и перемещается вокруг двух осей вращения для обеспечения движения рук 3 относительно туловища 2 аналогично возможным перемещениям, совершаемым плечом человека.
Человекоподобный робот 10 содержит также множество шарниров для приведения в движение ног робота и воспроизводства ходьбы, в частности шарниров, подобных тазобедренному суставу между туловищем и бедром, колену - между бедром и ногой и щиколотке - между ногой и ступней. Использовано множество форм моторизованных шарниров, приводящих в движение один из конструктивных элементов вокруг одной или множества степеней свободы при вращении.
Человекоподобный робот 10' имеет другую конструкцию. Для повышения устойчивости и опущения центра тяжести робота робот имеет не ногу, а юбку 7, содержащую в своем основании треноги 14 и способную перемещать робота. Юбка также содержит первый шарнир 12, относящийся к колену, между ногой 7a и бедром 7b. Второй шарнир 13, относящийся к тазобедренному суставу, установлен между туловищем 2 и бедром 7b. Эти два шарнира 12 и 13 представляют собой моторизованные шарнирные соединения вокруг оси вращения. Ось вращения Xa шарнира 12 и ось вращения Xb шарнира 13 по существу параллельны оси, соединяющей два плеча робота, позволяя наклонять робот вперед или назад. Фиг.2a и 2b детально описывают пример моторизованного шарнира, используемого в человекоподобном роботе 10ʹ.
Отметим также, что человекоподобный робот содержит определенное количество наружных конструктивных элементов, которые придают роботу эстетически красивый внешний вид. Эти конструктивные элементы могут быть прикреплены к внутренней конструкции съемным или несъемным способом для того, чтобы обеспечить возможность доступа к различным системам и механизмам робота. Человекоподобный робот 10' содержит, например, внешний корпус, снимаемый в задней части головы 1 (на фиг.1b не показан). Корпус удерживается на голове и может быть отсоединен посредством устройства типа клипсы.
Общая идея настоящего изобретения заключается в применении единого ключа для приведения в действие множества механизмов человекоподобного робота.
Как это описывается в последующем, рассматривается, например, возможность использования ключа для блокирования или разблокирования механическим путем шарнира робота или также для отсоединения внешнего корпуса и обеспечения доступа к внутренней части робота. Определение ключа и соединительных интерфейсов механизмов, приводимых в действие ключом, являются специфическими для ограничения доступа к механизмам одного обладателя ключа.
В последующем приводится описание изобретения касательно человекоподобного робота большого размера, похожего на человекоподобный робот 10', содержащего съемный внешний корпус и моторизованные шарниры, двигающиеся с определенной степенью подвижности, типа шарнирного соединения, которые могут приводиться в движение посредством единого ключа. Вполне очевидно, что изобретение не ограничивается человекоподобными роботами, ни данным типом приводимого в действие механизма. В целом изобретение относится к оборудованию, состоящему из ключа и робота, содержащего множество механизмов, приводимых в действие снаружи относительно робота, снабженного соединительным интерфейсом, в который может вставляться ключ, и выполненный таким образом, чтобы введение ключа приводило в действие механизм. Робот может быть человекоподобным или животноподобным, собранным под общим наименованием «подвижный робот». Изобретение также применимо к промышленным роботам.
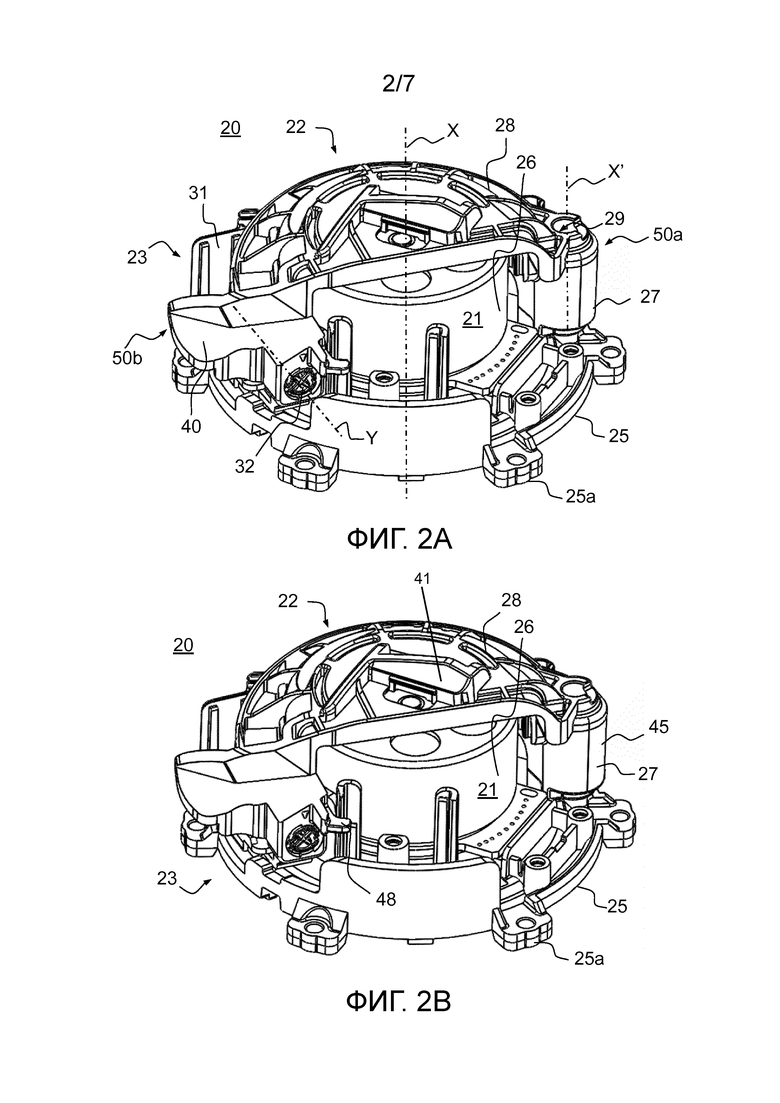
Фиг.2a и 2b изображают, согласно примеру, моторизованный шарнир, соответственно, в безопасном положении и рабочем положении. Шарнир 20 предназначен для установки между первым и вторым конструктивным элементами (на фиг. не показаны). Шарнир 20 содержит:
двигатель 21, способный приводить в движение второй конструктивный элемент относительно первого конструктивного элемента; причем двигатель содержит неподвижную часть, предназначенную для соединения с первым конструктивным элементом, и подвижную часть, приводимую в движение относительно неподвижной части и предназначенную для соединения со вторым конструктивным элементом;
тормозное устройство 22, способное оказывать воздействие на подвижную часть двигателя 21 в результате пружинящего действия для создания препятствия движению подвижной части относительно неподвижной части;
исполнительное устройство 23, способное перемещать тормозное устройство 22, противодействуя пружинящему действию таким образом, чтобы освободить подвижную часть двигателя 21 от усилия, оказываемого тормозным устройством, и позволить двигателю 21 приводить в движение подвижную часть относительно неподвижной части.
Двигатель 21 является, предпочтительно, ротационным электрическим двигателем, содержащим основание двигателя 25 и вал, приводимый во вращение относительно основания 25 вокруг оси X. Основание двигателя 25 образует неподвижную часть двигателя и имеет основание в форме диска, предназначенное для крепления на первом конструктивном элементе робота посредством шести лап для закрепления 25a, рассредоточенных в угловом направлении вокруг основания. Вал (на фигурах чертежа не виден) образует подвижную часть двигателя и жестко соединен с барабаном двигателя 26, имеющим по существу цилиндрическую форму. Вал проходит через основание двигателя и предназначен для соединения со вторым конструктивным элементом, предпочтительно, посредством устройства зубчатого зацепления (не показано). Сконструированный таким образом электрический двигатель 21 позволяет приводить вал во вращение относительно основания, приводя во вращение второй конструктивный элемент относительно первого конструктивного элемента.
Шарнир 20 также содержит тормозное устройство 22. На фиг.2a шарнир изображен в безопасном положении, в котором тормозное устройство оказывает усилие на подвижную часть двигателя для того, чтобы воспрепятствовать приведению во вращение вала. Как показано на фиг.2b, шарнир изображен в рабочем положении, в котором тормозное устройство перемещается таким образом, чтобы освободить двигатель от воздействия при торможении и позволяет приводить во вращение вал. В безопасном положении тормозное устройство 22 оказывает воздействие на барабан двигателя 21, предпочтительно, выполненный из металла, посредством башмака, предпочтительно, выполненного из эластомера, вступающего в контакт с цилиндрическим барабаном на участке его радиального сечения. Башмак воздействует на барабан двигателя для того, чтобы помешать, в результате трения, вращению вала относительно основания.
В представленном примере тормозное устройство 22 содержит закрепленный кронштейн 27, жестко соединенный с основанием двигателя 25, и подвижный рычаг 28. Подвижный рычаг 28 имеет полукруглую форму между первой оконечностью 50a и второй оконечностью 50b, образуя полукрышку, закрывающую частично барабан двигателя. Подвижный рычаг 28 соединен первой оконечностью 50a с закрепленным кронштейном 27 посредством шарнирного соединения 29 по оси X', которая по существу параллельна оси X вращения вала. Башмак закреплен на внутренней поверхности подвижного рычага таким образом, чтобы вступать в контакт с радиальной поверхностью барабана 26 при вращении подвижного рычагa вокруг своей оси X'. Башмак закреплен по существу на одинаковом расстоянии от первой и второй оконечностей 50a 50b подвижного рычага 28. Тормозное устройство 22 также содержит пружинно-инерционный механизм, предпочтительно, цилиндрическую винтовую пружину 45, накрученную вокруг оси Xʹ и опирающуюся на закрепленный кронштейн 27 и на подвижный рычаг 28 для оказания воздействия, стремясь отвести подвижный рычаг и закрепленный кронштейн. Усилие, оказываемое пружиной между подвижным рычагом и закрепленным кронштейном, передается на башмак, контактирующий с барабаном, позволяя заблокировать вал во время вращения. По умолчанию, шарнир заблокирован при вращении.
Шарнир также содержит исполнительное устройство 23, способное перемещать тормозное устройство, противодействуя пружинящему действию, для того, чтобы освободить двигатель от тормозного усилия и позволить двигателю привести вал во вращение. Согласно представленному примеру, линейное исполнительное устройство (не показано) установлено между закрепленным кронштейном 27 и второй оконечностью 50b подвижного рычага 28. Линейное исполнительное устройство содержит подвижный стержневой контакт, совершающий поступательные движения между двумя положениями по оси Y, внутри чехла. Чехол закреплен на державке 31, жестко соединенной с закрепленным кронштейном 27. Конец стержневого контакта имеет сферическую форму, которая взаимодействует с отпечатком шарика 32, выполненным в подвижном рычаге 28. Длина хода стержневого контакта между его двумя положениями определяет ход подвижного рычага между безопасным положением и рабочим положением. По умолчанию, когда, например, не осуществляется электропитание шарнира, стержневой контакт в результате воздействия пружины удерживается в своем самом удаленном положении. И наоборот, когда обеспечивается электропитание шарнира, исполнительное устройство может управляться для втягивания стержневого контакта в чехол, производя усилие, противодействующее пружинящему действию. Рассматриваются различные способы практического осуществления линейного исполнительного устройства, в частности линейное исполнительное устройство, управляемое посредством электромагнита.
Шарнир также содержит средства ручного перемещения тормозного устройства для разблокирования вращательного движения двух конструктивных элементов. В частности, на подвижном рычаге, рядом с его второй оконечностью 50b, выполнена наклонная плоскость 40 для того, чтобы инструмент, перемещаемый параллельно оси X вращения вала и против этой наклонной плоскости 40, мог перемещать подвижный рычаг из безопасного положения к рабочему положению, противодействуя пружинящему действию. Вторая наклонная плоскость 41 также выполнена рядом с центром полукруглой формы подвижного рычага. На практике моторизованный шарнир, изображенный на фигурах чертежа, встроен в робота, внутри внешней оболочки, изображенной на фиг.1a и 1b, придавая роботу эстетически красивый внешний вид.
Отметим также, что если на фигурах чертежа детально представлен частный пример моторизованного шарнира, перемещаемого вокруг двух или трех степеней подвижности, то понятно, что изобретение применимо в принципе ко всем типам шарниров, например, к шарниру с одной, двумя или тремя степенями подвижности при вращении или также к шарниру с одной или множеством степеней подвижности при поступательном перемещении.
Таким образом, моторизованный шарнир 20 является надежным, предоставляя двигателю тормозное устройство, приводимое в действие по умолчанию посредством пружинного механизма, и средства для освобождения двигателя от воздействия тормозного устройства, противодействуя усилию пружины. Средства отключения тормозного механизма содержат средства, управляемые электронным способом, что является задачей исполнительного устройства, и ручные средства, что является задачей наклонных плоскостей. Такой моторизованный шарнир может быть осуществлен, в частности, для шарниров колена 12 и тазобедренного сустава 13 человекоподобного робота 10ʹ, описание которого приведено на фиг.1b.
На фиг.3 представлен пример, изображенный в трех видах, ключа согласно изобретению для человекоподобного робота. Ключ 60 содержит два продолговатых стержня 61a и 61b, соединенных посредством центральной части 62. Два стержня 61a и 61b вытянуты согласно двум осям Za и Zb, которые по существу параллельны друг другу. Центральная часть 62 содержит отверстие 63, выполненное на конце, противоположном оконечности, на которой удерживаются два стержня 61a и 61b. Отверстие 63 предназначено для облегчения захвата ключа. Оно, например, соединено посредством кольца со связкой ключей подобно общеизвестному брелку для ключей. Согласно предпочтительному осуществлению изобретения, стержни 61a и 61b выполнены из материала на базе алюминия, а центральная часть 62 выполнена из материала на силиконовой основе.
Поперечное сечение стержней может быть круглым или, предпочтительно, яйцевидным. Стержни 61a и 61b симметричны друг другу таким образом, что ключ может быть автономно вставлен в одном или другом направлении. Как это будет детализировано на следующих фигурах чертежа, два стержня ключа предназначены для введения в два трубчатых отверстия соединительных интерфейсов для приведения в действие механизмов робота. Для этого удаление между осями трубчатых отверстий по существу равно расстоянию между Za и Zb стержней 61a и 61. Также поперечное сечение трубчатых отверстий адаптировано для того, чтобы позволить осуществлять введение каждого из стержней ключа. Другими словами, удаление осей и сечение - стержней и отверстия - рассчитаны таким образом, чтобы позволить введение ключа, и действуют как предохранительное устройство, позволяя помешать или, по меньшей мере, ограничить доступ к механизмам. Определение межосевого расстояния и сечения представляет собой простой и эффективный прием обеспечения безопасного доступа к механизмам. Выбор яйцевидного, но не круглого сечения позволяет, в частности, помешать пользователю привести в действие механизмы посредством обычной отвертки. Предпочтительно, стержням и отверстиям придана симметричная форма для того, чтобы каждый стержень мог быть вставлен в одно или в другое из двух отверстий.
Каждый из двух стержней 61a и 61b также содержит по одной канавке, обозначенной, соответственно, цифровыми позициями 65a и 65b, которые выполнены в верхней продольной части, рядом с центральной частью. Задачей канавок 65а и 65b является обеспечить удерживание в положении ключа в соединительном интерфейсе, как это описывается далее.
Каждый из стержней 61a и 61b также содержит на своем конце боковой скос, обозначенный, соответственно, цифровыми позициями 66a и 66b, и продольный скос, обозначенный, соответственно, цифровыми позициями 67a и 67b. Далее, на нижеследующих фигурах чертежа будет детализировано назначение этих скосов.
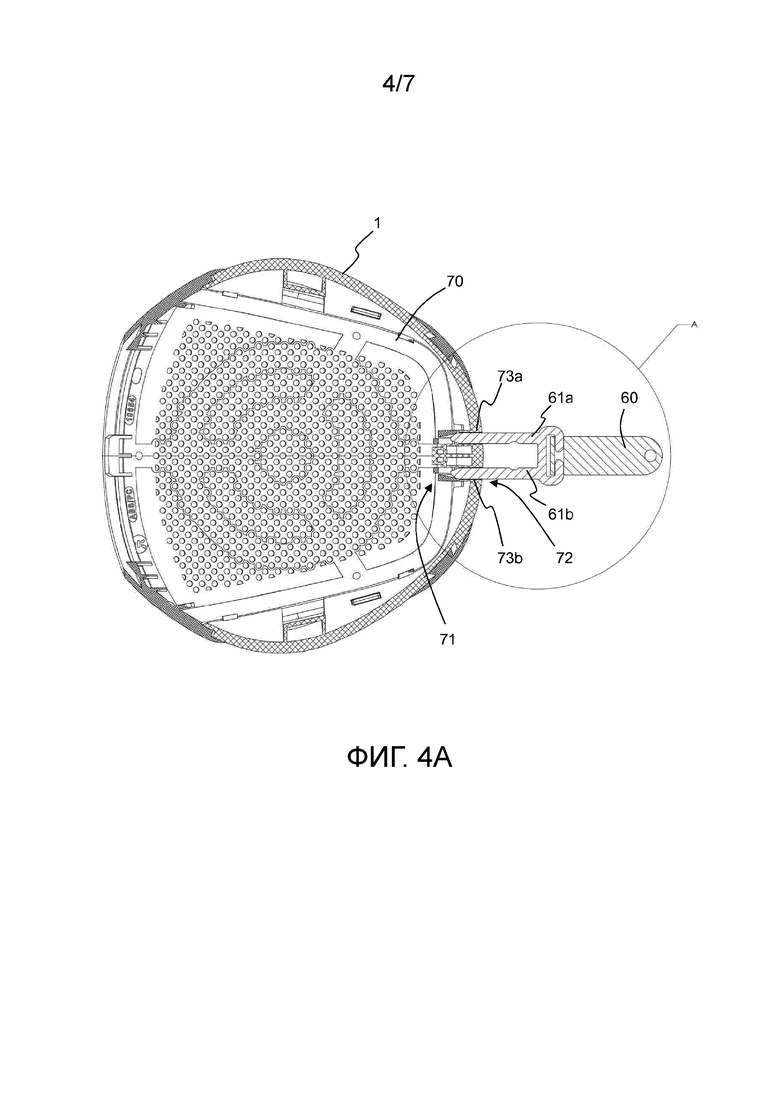
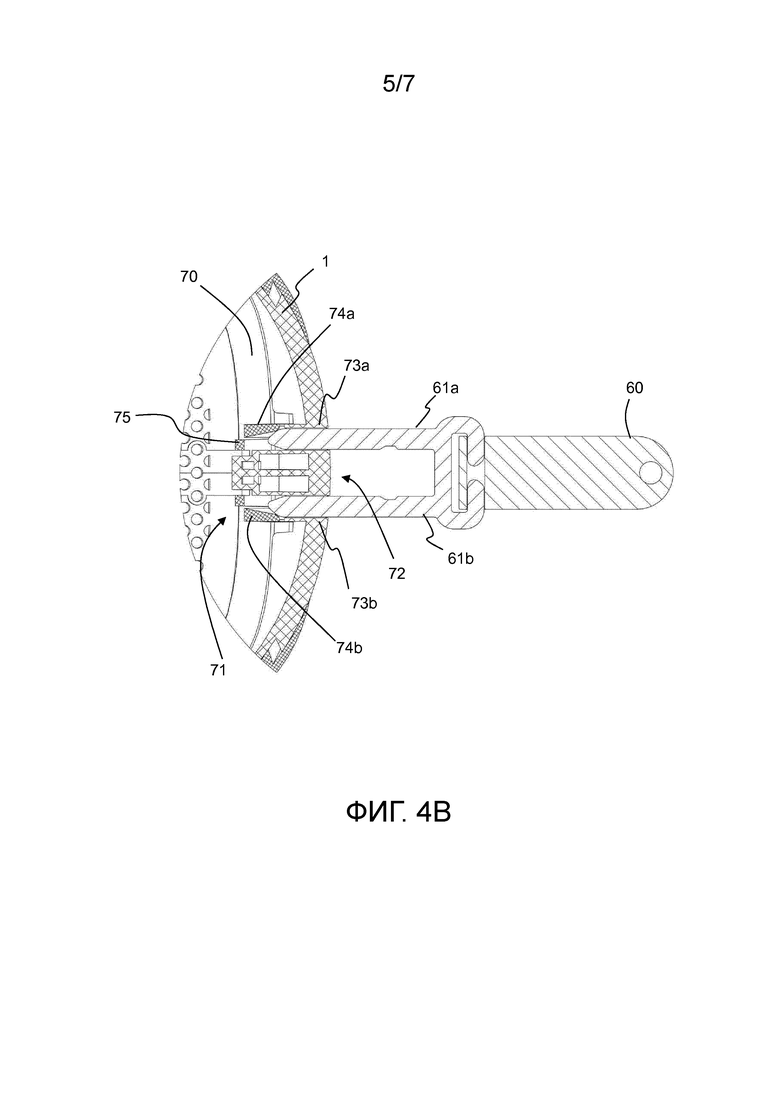
Фиг.4a и 4b изображают ключ согласно первому осуществлению изобретения, позволяющий разблокировать съемный внешний корпус, установленный на голове человекоподобного робота. Голова робота, изображенная в разрезе на фиг.4a, подобна голове 1 робота, описание которого приведено на фиг.1b. Голова содержит в задней части съемный внешний корпус 70, удерживаемый на роботе съемными средствами крепления 71 типа клипсы. В защелкнутом положении корпус жестко соединен с головой; в разъединенном положении корпус освобождает доступ к устройствам различного функционального назначения. Голова робота также содержит соединительный интерфейс 72, предназначенный для обеспечения возможности введения ключа для приведения в действие механизма, т.е. для разъединения корпуса и его освобождения от головы робота. Соединительный интерфейс 72 содержит два трубчатых отверстия 73a и 73b, оси которых по существу параллельны друг другу. Сечение отверстий и удаление между их осями рассчитаны таким образом, чтобы обеспечить возможность одновременного введения двух стержней ключа. Фиг.4a и 4b изображают положение, в котором ключ 60 частично вставлен в соединительный интерфейс 72.
Согласно особенному осуществлению изобретения, клипса 71 содержит два боковых деформируемых конструктивных элемента, обозначенных, соответственно, цифровыми позициями 74a и 74b, которые расположены, перекрывая, по меньшей мере, частично трубчатые отверстия, соответственно, 73a и 73b. Клипса также содержит осевой деформируемый конструктивный элемент 75, расположенный таким образом, что он перекрывает конец каждого из двух трубчатых отверстий. При введении ключа из зоны взаимодействия боковые скосы 66a и 66b стержней 61a и 61b начинают контактировать с боковыми деформируемыми конструктивными элементами 72a и 72b; причем прилагаемые оператором усилия по введению перемещают эти боковые конструктивные элементы. Концы стержней затем вступают в контакт и перемещают осевой боковой конструктивный элемент 75. Перемещение в результате упругой деформации деформируемых конструктивных элементов клипсы позволяет освободить съемный корпус. Клипса рассчитана таким образом, чтобы перемещать корпус на несколько миллиметров. Вмешательство вручную оператора позволяет затем извлечь корпус.
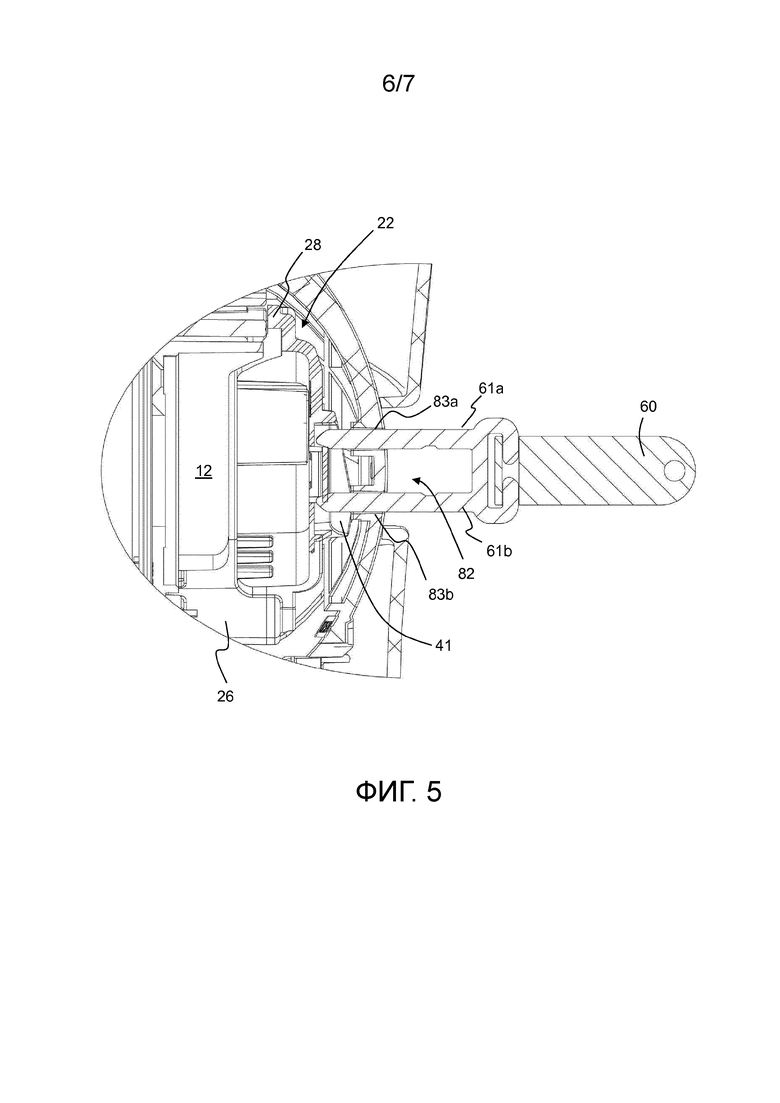
На фиг.5 изображен ключ согласно второму осуществлению изобретения, позволяющему разблокировать тормозное устройство моторизованного шарнира человекоподобного робота. На фиг.5 изображен вид в разрезе части шарнира 12 человекоподобного робота 10ʹ, описание которого приведено на фиг.1b. Шарнир 12 использует моторизованный шарнир 20, подобный шарниру, описание которого представлено на фиг.2a и 2b. Шарнир содержит тормозное устройство 22, образованное закрепленным кронштейном и подвижным рычагом 28, производящее тормозное усилие на барабан двигателя 26 посредством пружинного механизма между закрепленным кронштейном и подвижным рычагом. Наклонная плоскость 41 выполнена на подвижном рычаге 28, как это показано на фиг.2b.
Шарнир 12 содержит соединительный интерфейс 82, предназначенный для обеспечения возможности введения ключа для освобождения шарнира от включения тормозного устройства. Как и ранее, соединительный интерфейс 82 содержит два трубчатых отверстия 83a и 83b, которым придана форма, позволяющая осуществлять одновременное введение двух стержней 61a и 61b ключа 60. Соединительному интерфейсу 82 придана такая форма, чтобы наклонная плоскость 41 перекрывала, по меньшей мере, частично одно из трубчатых отверстий 83a и 83b, когда шарнир находится в безопасном положении, т.е. когда тормозное устройство контактирует с барабаном двигателя. Во время введения ключа, по меньшей мере, один из продольных скосов 67a и 67b стержней 61a и 61b вступает в контакт с наклонной плоскостью 41. Усилие по введению, производимое оператором, приводит к перемещению подвижного рычага, противодействуя возвращающему усилию пружины. На фиг.5 изображено положение, в котором ключ 60 вставлен в соединительный интерфейс 82; причем шарнир освобожден от включения тормозного устройства. Таким образом, введение ключа в зону взаимодействия позволяет освободить шарнир таким образом, чтобы изменить относительную направленность конструктивных элементов. Конструктивные элементы робота могут находиться в сложенном положении, например, для этапа транспортировки или складирования. Согласно этому второму осуществлению, соединительному интерфейсу придана форма для того, чтобы оси трубчатых отверстий были по существу параллельны оси вращения шарнира. Наклонная плоскость 41 и продольные скосы позволяют передавать усилия по введению перпендикулярно оси вращения таким образом, чтобы перемещать подвижный рычаг тормозного устройства. Другими словами, соединительному интерфейсу шарнира придана форма для того, чтобы скос стержня вступал в контакт с наклонной плоскостью при введении ключа в зону взаимодействия таким образом, чтобы передавать прилагаемые усилия по оси введения ключа, параллельной осям отверстий, к оси перемещения тормозного устройства.
Фиг.6 изображает ключ согласно третьему осуществлению изобретения, позволяющему разблокировать тормозное устройство моторизованного шарнира человекоподобного робота. Фиг.6 изображает вид в разрезе части шарнира 13 человекоподобного робота 10ʹ, описание которого приведено на фиг.1b. Шарнир 13 осуществляет моторизованное шарнирное соединение 20, подобное описанному на фиг.2a и 2b. Как и ранее, шарнир содержит тормозное устройство 22, образованное закрепленным кронштейном и подвижным рычагом 28, производящим тормозное усилие на барабан двигателя 26 посредством пружинного механизма между закрепленным кронштейном и подвижным рычагом. Плоскость 40 выполнена на подвижном рычаге 28 рядом с его оконечностью 50b, как это показано на фиг.2b.
Шарнир 13 содержит соединительный интерфейс 92, предназначенный для предоставления возможности введения ключа для освобождения шарнира от воздействия тормозного устройства. Соединительный интерфейс 92 содержит два трубчатых отверстия 93a и 93b, межосевое расстояние между которыми и сечение рассчитаны таким образом, чтобы позволить осуществлять одновременное введение двух стержней 61a и 61b ключа 60. Соединительный интерфейс 92 рассчитан таким образом, чтобы плоскость 40 тормозного устройства перекрывала, по меньшей мере, частично одно из трубчатых отверстий 93a и 93b, когда шарнир находится в безопасном положении, т.е. когда тормозное устройство контактирует с барабаном двигателя. При введении ключа боковой скос 66b стержня 61b вступает в контакт с наклонной плоскостью 40. Усилие по введению, прилагаемое оператором, приводит в движение подвижный рычаг 28, противодействуя возвращающему усилию пружины. Фиг.5 изображает положение, в котором ключ 60 вставлен в соединительный интерфейс 92; причем шарнир освобожден от воздействия тормозного устройства. Как и ранее, введение ключа в зону взаимодействия позволяет освободить шарнир так, чтобы изменить относительную направленность конструктивных элементов.
В этом третьем осуществлении соединительный интерфейс 92 содержит также два выступа 94a и 94b, частично перекрывающие трубчатые отверстия 93a и 93b, которые рассчитаны таким образом, чтобы вступать во взаимодействие с канавками 65a и 65b стержней 61a и 61b. Таким образом, введение ключа в соединительный интерфейс 92 отодвигает выступы посредством упругой деформации. Боковые скосы 66a и 66b стержней позволяют, предпочтительно, облегчить введение стержней и постепенное перемещение выступов. Когда ключ полностью вставлен, выступы вставляются в канавки, занимая их положение и позволяя удерживать ключ в установленном положении. Извлечение ключа нуждается в оказании большего воздействия для деформации выступов. Другими словами, соединительный интерфейс выполнен таким образом, чтобы удерживать в положении ключ, вставленный в соединительный интерфейс до пороговой величины предварительно заданного усилия; причем выступ деформируется таким образом, чтобы освобождать канавку от выступа, когда к ключу прилагается усилие по извлечению, которое превышает предварительно заданную пороговую величину. Эта пороговая величина может быть определена при конструкторской разработке канавок и выступов, в частности, путем выбора материалов и углов скоса кромки между выступами и канавками.
Удерживание в заданном положении ключа позволяет удерживать вращающийся шарнир без вмешательства оператора. Этот функционал может быть использован, в частности, на этапе транспортировки робота. Шарнир удерживается свободным при вращении, он может, например, выдерживать значительные напряжения вибрации, возникающие при транспортировке.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗОПАСНЫЙ МОТОРИЗОВАННЫЙ ШАРНИР, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ОСНАЩЕНИЯ ЧЕЛОВЕКОПОДОБНОГО РОБОТА | 2015 |
|
RU2669130C2 |
| УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ КЛИПС С ВОЗМОЖНОСТЬЮ ПРЕДОТВРАЩЕНИЯ ВЫПАДЕНИЯ КЛИПСЫ | 2006 |
|
RU2435536C2 |
| ВЫДВИГАЮЩИЙ КЛИПСЫ МЕХАНИЗМ С ВОЗМОЖНОСТЯМИ СОВМЕЩЕНИЯ | 2006 |
|
RU2435535C2 |
| УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ КЛИПС С ВОЗМОЖНОСТЯМИ СОПРОТИВЛЕНИЯ СМЕЩЕНИЮ | 2006 |
|
RU2433792C2 |
| КОМПРЕССОР | 2014 |
|
RU2642959C2 |
| ТРУБООТРЕЗНОЙ СТАНОК | 2017 |
|
RU2739359C2 |
| СТИРАЛЬНАЯ МАШИНА | 2017 |
|
RU2734407C1 |
| СИСТЕМА ПРИВОДА КЛАПАНОВ ДВИГАТЕЛЯ | 2004 |
|
RU2328605C2 |
| Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы | 2023 |
|
RU2818704C1 |
| УСОВЕРШЕНСТВОВАННЫЙ МЕХАНИЗМ ПРОДВИЖЕНИЯ КЛИПС | 2010 |
|
RU2597771C2 |


Изобретение относится к человекоподобному роботу, содержащему ключ (60) для приведения в действие механизмов робота. Человекоподобный робот содержит множество механизмов (70), приводимых в действие снаружи относительно робота. Каждый из механизмов (70) содержит соединительный интерфейс (72), в который может быть вставлен ключ (60). Причем соединительный интерфейс (72) каждого из механизмов (70) выполнен таким образом, что введение ключа (60) приводит в действие механизм (70). Предпочтительно, ключ (60) содержит два продолговатых стержня (61a, 61b), предназначенных для одновременного введения в два продольных отверстия (73a, 73b). Изобретение обеспечивает возможность применения единого ключа для приведения в действие множества механизмов человекоподобного робота, для блокирования или разблокирования механическим путем шарнира робота или для отсоединения внешнего корпуса и обеспечения доступа к внутренней части робота. Определение ключа и соединительных интерфейсов механизмов, приводимых в действие ключом, являются специфическими для ограничения доступа к механизмам одного обладателя ключа. 10 з.п. ф-лы, 11 ил.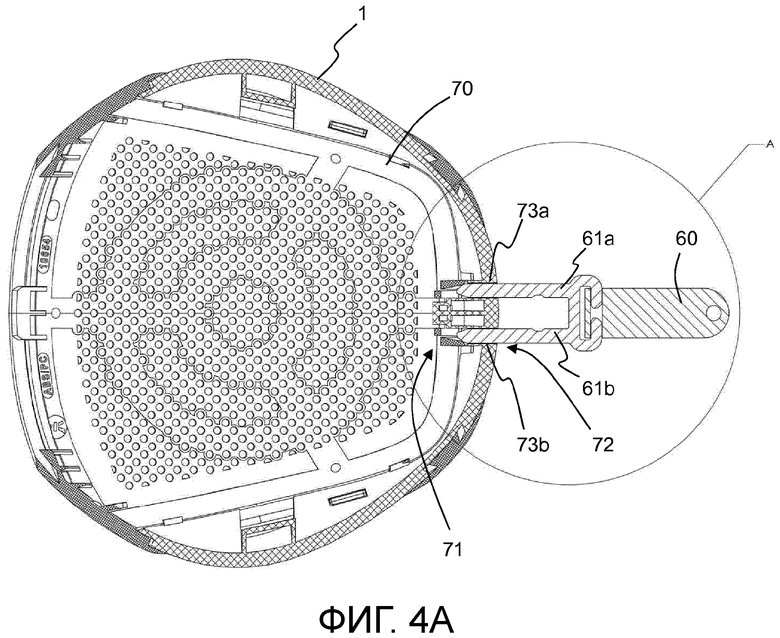
1. Человекоподобный робот (10’), содержащий ключ (60) для приведения в действие механизмов робота, при этом человекоподобный робот (10') содержит множество механизмов (70, 12, 13), приводимых в действие снаружи относительно робота (10'), отличающийся тем, что каждый из механизмов (70, 12, 13) содержит соединительный интерфейс (72, 82, 92), предназначенный для введения упомянутого ключа (60), причем соединительный интерфейс (72, 82, 92) каждого из механизмов (70, 12, 13) выполнен с возможностью приведения в действие механизма (70, 12, 13) введением ключа (60).
2. Робот по п.1, в котором:
ключ (60) содержит два продолговатых стержня (61a, 61b), оси (Za, Zb) которых по существу параллельны друг другу;
соединительный интерфейс (72) каждого из механизмов (70) содержит два трубчатых отверстия (73a, 73b), оси которых по существу параллельны друг другу, выполненных с возможностью обеспечения одновременного введения двух стержней (61a, 61b) ключа (60) в два отверстия (73a, 73b) для приведения в действие механизма (70),
причем стержни (61a, 61b) и отверстия (73a, 73b) имеют симметричную конфигурацию для того, чтобы каждый стержень (61a, 61) мог быть вставлен в одно или другое из двух отверстий (73a, 73b).
3. Робот по п.2, в котором одним из механизмов является внешний съемный корпус (70), удерживаемый на роботе (10') клипсой (71), причем соединительный интерфейс (72) корпуса (70) выполнен таким образом, что введение стержней (61a, 61b) в отверстия (73a, 73b) перемещает деформируемый элемент (74a, 74b, 75) клипсы, освобождая корпус (70) робота (10').
4. Робот по п.3, в котором:
стержни (61a, 61b) ключа (60) на своих концах содержат скос (66a, 66b);
клипса (70) содержит боковой деформируемый элемент (74a, 74b) и осевой деформируемый элемент (75) и
соединительный интерфейс (72) корпуса (70) выполнен таким образом, что скос (66a) стержня (61a) во время введения ключа (60) в соединительный интерфейс (72) перемещает боковой деформируемый элемент (74a), а затем осевой деформируемый элемент (75).
5. Робот по любому из пп.2-4, в котором одним из механизмов является моторизованный шарнир (12, 13), содержащий тормозное устройство (22), выполненное с возможностью фиксации шарнира (12, 13) посредством пружинного эффекта, причем соединительный интерфейс (82, 92) шарнира (12, 13) выполнен таким образом, что введение одного стержня (61b) в трубчатое отверстие (83b, 93b) перемещает тормозное устройство (22), противодействуя пружинному эффекту, освобождая шарнир (12, 13) от фиксации.
6. Робот по п.5, в котором:
стержни (61a, 61b) ключа (60) на своих концах имеют скос (67a, 67b);
тормозное устройство (22) содержит наклонную поверхность (41) и
соединительный интерфейс (82) шарнира (12) выполнен таким образом, что скос (67b) стержня (61b) вступает в контакт с наклонной поверхностью (41) во время введения ключа (60) в соединительный интерфейс (82) для того, чтобы направить усилие, прилагаемое по оси введения ключа (60), параллельной осям отверстий (83a, 83b), к оси перемещения тормозного устройства (22).
7. Робот по любому из пп.2-6, в котором:
стержни (61a, 61b) ключа (60) содержат канавку (65a, 65b) и
соединительный интерфейс (92) содержит выступ (94a, 94b), выполненный с возможностью взаимодействия с канавкой (65a, 65b) стержня (61a, 61b), когда ключ (60) вставлен, для удерживания ключа (60) вставленным в соединительный интерфейс (92) до пороговой величины заданного усилия, причем выступ (94a, 94b) выполнен с возможностью деформации для освобождения канавки (65a, 65b) от выступа (94a, 94b), когда к ключу (60) прилагается извлекающее усилие, превышающее заданную пороговую величину.
8. Робот по любому из пп.1-7, в котором поперечное сечение стержней (61a, 61b) и отверстий (73a, 73b) является овоидальным.
9. Робот по любому из пп.1-8, в котором стержни (61a, 61b) выполнены из материала на основе алюминия.
10. Робот по любому из пп.1-9, в котором ключ (60) содержит центральную часть (62), соединяющую два стержня (61a, 61b), которая имеет отверстие (63), предназначенное для облегчения захвата ключа (60).
11. Робот по п.10, в котором центральная часть (62) ключа (60) выполнена из материала на основе силикона.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДОСТУПНЫХ ДЛЯ МИНЕРАЛИЗАЦИИ БИОФИЛЬНЫХ ЭЛЕМЕНТОВ ПОЧВЫ И СТЕПЕНИ ИХ ДОСТУПНОСТИ | 1992 |
|
RU2050544C1 |
| ЗУБЧАТЫЙ ВЕНЕЦ ПОВОРОТНОГО МЕХАНИЗМА ОДНОКОВШОВОГО ЭКСКАВАТОРА | 0 |
|
SU176204A1 |
| US 2010065999 А1, 18.03.2010. | |||

