ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области робототехники, точнее к пространственным манипуляционным механизмам параллельной структуры с 3-мя вращательными степенями свободы и может найти применение в многопозиционных обрабатывающих центрах, сборочных конвейерах, многофункциональных технологических установках, медицинской реабилитологии.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известны подобные устройства, например, бионический плечевой сустав (см. CN101301755A, опубл. 12.11.2008), который имеет смещающий выход и сферические поверхности с тремя степенями свободы, которые расположены параллельно. Бионический плечевой сустав отличается тем, что осевая линия нижнего опорного стержня шарнира центральной сферической поверхности проталкивается через центр неподвижной платформы механизма параллельного сферической поверхности с тремя степенями свободы; кроме того, внешний конец нижнего опорного стержня шарнира центральной сферической поверхности жестко соединен с неподвижной площадкой механизма параллельного сферической поверхности с тремя степенями свободы; неподвижная платформа жестко соединена с неподвижным кольцом через три равномерно распределенных соединительных стойки; осевая линия прямого выходного стержня шарнира центральной сферической поверхности или осевая линия прямого выходного стержня круглой призмы проталкивается через центр подвижной платформы трехстепенной параллельный механизм со сферическими поверхностями; кроме того, внешний конец прямого выходного стержня механизма параллелизма центральной сферической поверхности неподвижно соединен с подвижной платформой.
Бионический плечевой сустав обладает такими преимуществами, как большая статическая жесткость, большое рабочее пространство, однако пространство перемещения мобильной платформой у предложенного аналога недостаточно.
Также из уровня техники известен бионический плечевой сустав с пятью степенями свободы (см. CN104908060A, опубл. 16.09.2015). Параллельный механизм с двумя степенями свободы состоит из бионической стойки, промежуточной подвижной платформы, S-образного соединительного стержня между бионической стойкой и промежуточной подвижной платформой и двух подвижных ветвей одинаковой конструкции, при этом каждая подвижная ветвь цепи последовательно состоит из подвижной пары линейных направляющих, ведущего ползуна, крюкового соединения, ведомого стержня и сферической пары; сферический параллельный механизм с тремя степенями свободы, содержащий промежуточную подвижную платформу, три вращающихся ответвления и хвостовую подвижную платформу; сферический шарнир с большим рабочим пространством содержит опорный стержень, двухушковую скобу, шаровую головку, П-образную мешалку, промежуточный опорный ролик, полый выходной стержень и штифт; блок вывода смещения содержит выходной стержень и выходной стержень смещения. Согласно бионическому плечевому суставу, выходной стержень смещения может двигаться в пяти степенях свободы, а бионический плечевой сустав максимально приближен к реальному состоянию человеческого плечевого сустава с точки зрения строения, движения и функции.
Наиболее близким аналогом по мнению заявителя является плечевой шарнир робота (см. CN100544901, опубл. 30.09.2009). Серводвигатель плечевого шарнира установлен на основании, а один конец приводного стержня жестко соединен с валом вращения серводвигателя через монтажное отверстие. Другой конец ведущего стержня соединен с одним концом ведомого стержня через первый поворотный шарнир, а другой конец ведомого стержня соединен с подвижной платформой, оси валов вращения трех серводвигателей в трех ветвях движения перпендикулярны друг другу в пространстве, а трех ведомых рычагов соединены с подвижной платформой за три секундных оборота Оси валов вторичных шарниров перпендикулярны друг другу в пространстве. Подвижная платформа может быть соединена с механическим рычагом, а трехмерное вращение подвижной платформы может быть реализовано посредством соответствующего привода соответствующих приводных стержней через три серводвигателя. Изобретение имеет преимущества простой конструкции, высокой несущей способности, высокой скорости отклика, хорошей технологичности и т. д. и подходит для использования в качестве плечевого сустава человекоподобного робота.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Данное изобретение направлено на решение технической проблемы, связанной созданием параллельного сферического манипулятора асимметричного типа с тремя степенями свободы с широким углом отклонений мобильной платформы.
Техническим результатом изобретения является увеличение угла отклонений мобильной платформы.
Технический результат достигается посредством параллельного сферического манипулятора асимметричного типа с тремя степенями свободы, содержащего три нижних дугообразных опорных плеча, каждое из которых выполнено в виде кинематического звена с дугообразным стержнем одним концом с возможностью вращения закреплённого на одной оси вращения с верхними дугообразными опорными плечами и размещенной внутри верхних опорных дугообразных плеч мобильной платформой.
Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы характеризуется тем, что оси вращения размещены в одной плоскости на расстоянии 120° друг от друга, другие концы нижних дугообразных опорных плеч размещены с возможностью вращения на базовой оси, размещенной на основании робота, посредством привода вращения, обеспечивающим вращение по меньшей мере одного из установленных на общую ось нижнего дугообразного опорных плеча, и по крайней мере двух сопряженных верхних дугообразных опорных плеч.
В предпочтительном варианте выполнения мобильная платформа три вращательные степени свободы в пределах от -90 до 90 градусов.
В предпочтительном варианте выполнения верхние дуговые опорные плечи имеют форму дуг окружности.
В предпочтительном варианте выполнения нижние дуговые опорные плечи имеют форму дуг окружности.
В предпочтительном варианте выполнения нижние дуговые опорные плечи имеют форму скругленного прямого угла.
В предпочтительном варианте выполнения оси вращения нижних, верхних дугообразных опорных плеч и мобильной платформой соединены с нижними опорными плечами посредством активного сустава, включающего привод, обеспечивающий вращение верхних дугообразных опорных плеч.
В предпочтительном варианте выполнения базовая ось соединена с активным базовым суставом, включающего привод вращения нижних дугообразных опорных плеч.
В предпочтительном варианте выполнения привод вращения выполнен в виде мотора с полым валом.
В предпочтительном варианте выполнения привод вращения одного из установленных на общую ось цилиндрических втулок нижних дугообразных опорных плеч содержит вал, длина которого не меньше суммарной длины трех цилиндрических втулок нижних дугообразных опорных плеч и сопряжено с одной из них на шпоночное или аналогичное соединение.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых:
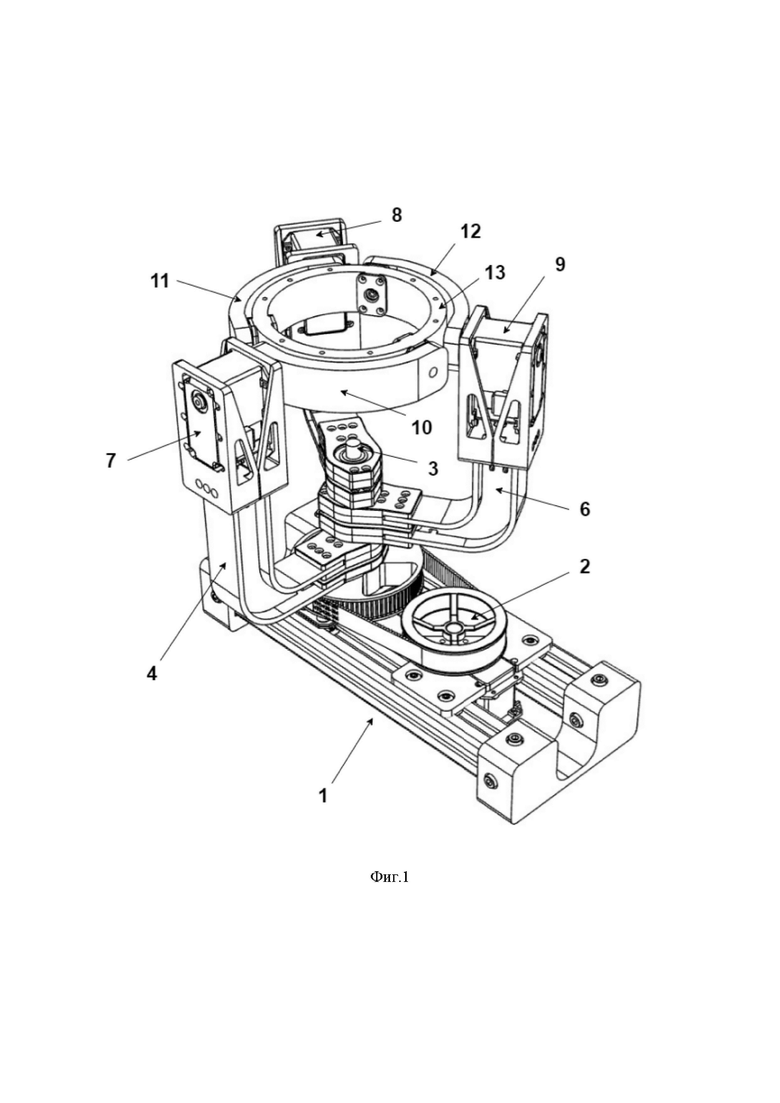
На фиг. 1 показан параллельный сферический манипулятор асимметричного типа с тремя степенями свободы;
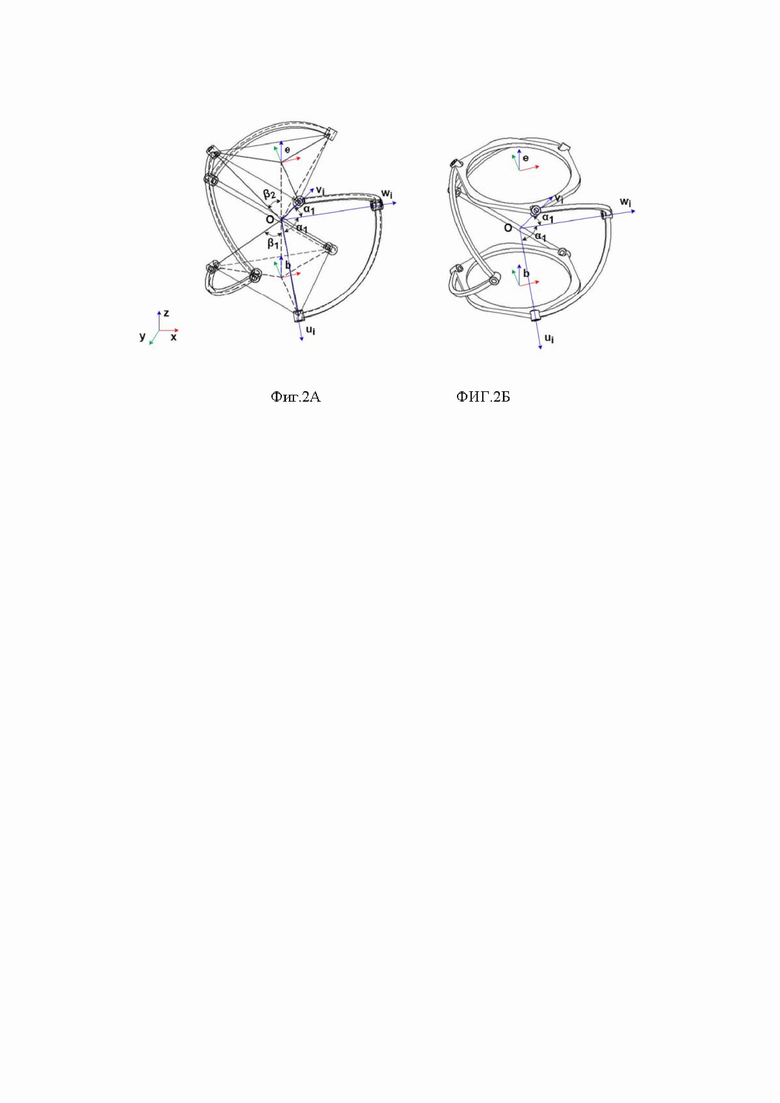
На фиг.2 показана схема систем координат параллельного сферического манипулятора; математическое приближение (2А) реальная модель (2Б).
Позиции на фиг.1 обозначают следующее:
1 - основание робота;
2 - активный базовый сустав;
3 - базовая ось;
4, 5, 6 - нижние дугообразные опорные плечи;
7, 8, 9 - активные суставы;
10, 11, 12 - верхние дугообразные опорные плечи;
13 - мобильная платформа.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленный параллельный сферический манипулятор асимметричного типа с тремя степенями свободы, как показано на фиг.1, имеет нижниее дугообразные опорные плечи 4, 5, 6. Плечи 4, 5, 6 представляют собой кинематические звенья с дугообразным стержнем. Один конец каждого нижнего дугообразного опорного плеча 4, 5, 6 закреплен с возможностью вращения на одной оси вращения соответственно с верхними дугообразными опорными плечами 10, 11, 12 и размещенной внутри верхних опорных дугообразных плеч мобильной платформой 13. Верхние дуговые опорные плечи 10, 11, 12 могут иметь форму дуг окружности. Нижние дуговые опорные плечи 4, 5, 6 могут иметь форму дуг окружности или форму скругленного прямого угла. Оси вращения размещены в одной плоскости на расстоянии 120° друг от друга, другие концы нижних дугообразных опорных плеч 4, 5, 6. размещены с возможностью вращения на базовой оси 3, размещенной на основании робота 1, посредством привода вращения. Привод приводит во вращение один или несколько установленных на общую ось нижних дугообразных опорных плеч 4, 5, 6, которые в свою очередь приводят во вращение оба сопряженные с каждым из нижних плеч 4, 5, 6 верхние дугообразные опорные плечи 10, 11, 12.
Оси вращения нижних 4, 5, 6, верхних дугообразных опорных плеч 10, 11, 12 и мобильной платформы 13 соединены с нижними опорными плечами посредством активного сустава 7, 8, 9, включающего привод, обеспечивающий вращение верхних дугообразных опорных плеч 10, 11, 12. Базовая ось 3 соединена с активным базовым суставом 7, 8, 9, включающего привод вращения нижних дугообразных опорных плеч 4, 5, 6. Привод вращения выполнен в виде мотора с полым валом.
Привод вращения одного из установленных на общую ось цилиндрических втулок нижних дугообразных опорных плеч содержит вал, длина которого не меньше суммарной длины трех цилиндрических втулок нижних дугообразных опорных плеч и сопряжено с одной из них на шпоночное или аналогичное соединение.
На фиг. 2А и фиг. 2Б представлена системы координат предлагаемого параллельного сферического манипулятора.
На фигурах предлагаемого изобретения приняты следующие обозначения: подвижные кинематические соединения – 1. Центр вращения робота находится в точке О, это точка соприкосновения вершин двух пирамид. Набор углов  определяет механические свойства данного робота и не изменяется для конфигурации, данные параметры называются рабочими параметрами робота. Углы
определяет механические свойства данного робота и не изменяется для конфигурации, данные параметры называются рабочими параметрами робота. Углы  и
и определяют положение центра вращения и угол крепления ног к базовой и мобильной платформам соответственно, а углы
определяют положение центра вращения и угол крепления ног к базовой и мобильной платформам соответственно, а углы  и
и  определяют длины дуг опорных плеч, из которых состоит каждая нога робота.
определяют длины дуг опорных плеч, из которых состоит каждая нога робота.
На фиг.2А b и e обозначают системы координат базовой и подвижной платформ, они являются общими для всех ног. А системы координат u, w и v принадлежат суставам в каждой ноге. Причем z-компонента систем координат направлена вдоль оси вращения каждого сустава. Углы в суставах каждой ноги мы будем обозначать как вектор  . Ноги располагаются на верхней и нижней платформах с углом
. Ноги располагаются на верхней и нижней платформах с углом  , где i - номер ноги:
, где i - номер ноги:
Положение подвижной платформы робота можно описать, используя XYZ параметризацию углов Эйлера [4-6].

Поскольку робот имеет параллельную структуру, то гомогенная трансформация каждой ноги должны сходиться в одной точке:

Робот обладает набором активных и пассивных суставов. Движение робота осуществляется за счет активных суставов, которые содержат в себе источник перемещения. Пассивные суставы регулируют движение в роботе за счет его морфологической структуры и чаще всего пассивные суставы содержат в себе подшипники. В данном исследовании сравниваются классическое и асимметричное исполнения робота. В классическом исполнении робота активные суставы находятся в месте соединения ног с базовой платформой что на схеме соответствует u системам координат. Соответственно набор активных и пассивных суставов данного исполнения может быть описан следующим набором векторов:

Второй - асимметричный тип, при котором три активных сустава находятся в месте соединения опорных плеч каждой ноги робота, что соответствует w системам координат и один из двигателей находится в основании первой ноги, соответственно набор активных и пассивных суставов можно описать как:

Для вычисления углов в нижних суставах опорных плеч нам нужно воспользоваться скалярным произведением для z-векторов v и w систем координат в каждой из ног. Известно что их скалярное произведение должно быть равно косинусу дуги опорного плеча между ними:
В последнем уравнении можно провести следующую замену:

Соответственно уравнение (1.6) преобразуется в простое квадратное уравнение:
Что означает, что решением для  будет решение данного квадратного уравнение и его дальнейшее преобразование через арктангенс:
будет решение данного квадратного уравнение и его дальнейшее преобразование через арктангенс:
Чтобы вычислить углы в средних суставах между опорными плечами в ноге используется следующее уравнение:

Для вычисления углов проводится тот же набор операций над уравнением (1.10) что был описан в уравнениях (1.7-9), только относительно угла .
Дифференциальная задача кинематики для данной состоит в том чтобы найти приращения матрицу трансформации между приращениями углов в ориентации мобильной платформы и углов в активных суставах [9, 10]. Данная трансформация называется якобианом и для отдельной ноги (если рассматривать ее с точки зрения последовательного манипулятора) имеет вид:

Параллельный сферический манипулятор имеет структуру замкнутой цепи и поэтому имеет ограничения, описываемые следующей системой уравнений:
Это означает что имеет место быть следующее соотношение между активными и пассивными суставами

Исходя из этого приращение углов в пассивных суставах зависят от активных суставов по следующему закону:
Финальный вид якобиана для классического исполнения данного типа манипулятора:
(15)
И финальная версия якобиана для асимметричного исполнения имеет вид:

(16)
Заявляемая кинематическая модель параллельного сферического манипулятора лежит в основе роботизированного тренажера сустава кисти руки.
В первую очередь были решены прямая и обратная задачи кинематики для данного типа роботов. Обратная задача решалась на основе геометрических особенностей робота, прямая задача была решена за счет решения нелинейной задачи оптимизации на основе идеи о том, что робот может представлять собой систему из 3-х роботизированных рук, конечный эффектор которых сходится всегда в одной точке.
Дифференциальная задача кинематики для данного типа роботов была вычислена за счет тех же базовых концепций, что и в решении прямой задачи кинематики, за исключением того, что конечная матрица Якоби рассчитывается по одной из ног робота.
После решения базовых задач кинематики было дано определение для рабочего пространства данного типа роботов, а также было проведено исследование сингулярных состояний и рассмотрено несколько типов внутренних коллизий для робота. На базе этих определений была сформулирована задача оптимизации параметров робота для максимизации рабочего пространства.
Было проведено сравнение двух исполнений робота (классического и асимметричного) на базе решений задач оптимизации и было выбрано исполнение с максимальным рабочим пространством.
В результате проведения исследований подтвердилось, что предложенное асимметричное исполнение параллельного сферического манипулятора является более выигрышным с точки зрения полезного рабочего пространства, чем классическое исполнение в ситуации, где нижние опорные плечи сходятся вдоль одной оси. Данное утверждение было подтверждено математическим анализом системы.
Таким образом для описанной математическая модель для двух исполнений параллельного сферического манипулятора, был проведен анализ его сингулярных состояний и коллизионный анализ и решена задача оптимизации рабочего пространства и были выявлены показатели системы для двух исполнений робота, при которых достигается максимальное рабочее пространство.
После чего были подобраны моторы, для данного типа роботов, подходящих для человеческой руки по максимально допустимым параметрам относительно моментов сил для кисти руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| СИСТЕМА АДАПТИВНОЙ КОМПЕНСАЦИИ ПРОМЫШЛЕННОГО РОБОТА | 2022 |
|
RU2785421C1 |
| ПРОСТРАНСТВЕННЫЙ G-РОБОТ | 2021 |
|
RU2758392C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РЕАБИЛИТАЦИОННЫЙ РОБОТ-МАНИПУЛЯТОР И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И ДИАГНОСТИКИ ПАЦИЕНТА С ЕГО ПОМОЩЬЮ | 2014 |
|
RU2564754C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
Изобретение относится к области робототехники и может найти применение в многопозиционных обрабатывающих центрах, сборочных конвейерах, многофункциональных технологических установках, медицинской реабилитологии. Манипулятор содержит три нижних дугообразных опорных плеча, каждое из которых выполнено в виде кинематического звена с дугообразным стержнем, одним концом с возможностью вращения закреплённым на одной оси вращения с верхними дугообразными опорными плечами и размещенной внутри верхних опорных дугообразных плеч мобильной платформой. При этом другие концы нижних дугообразных опорных плеч размещены с возможностью вращения на базовой оси, размещенной на основании робота, посредством привода вращения, обеспечивающего вращение по меньшей мере одного из установленных на общую ось нижних дугообразных опорных плеч и по крайней мере двух сопряженных верхних дугообразных опорных плеч. Обеспечивается широкий угол отклонений мобильной платформы. 7 з.п. ф-лы, 2 ил.
1. Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы, содержащий три нижних дугообразных опорных плеча, каждое из которых выполнено в виде кинематического звена с дугообразным стержнем, одним концом с возможностью вращения закреплённым на одной оси вращения с верхними дугообразными опорными плечами и размещенной внутри верхних опорных дугообразных плеч мобильной платформой, отличающийся тем, что другие концы нижних дугообразных опорных плеч размещены с возможностью вращения на базовой оси, размещенной на основании робота, посредством привода вращения, обеспечивающего вращение по меньшей мере одного из установленных на общую ось нижних дугообразных опорных плеч и по крайней мере двух сопряженных верхних дугообразных опорных плеч.
2. Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы по п.1, отличающийся тем, что мобильная платформа имеет три вращательные степени свободы в пределах от -90 до 90 градусов.
3. Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы по п.1, отличающийся тем, что верхние дуговые опорные плечи имеют форму дуг окружности.
4. Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы по п.1, отличающийся тем, что нижние дуговые опорные плечи имеют форму дуг окружности.
5. Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы по п.1, отличающийся тем, что нижние дуговые опорные плечи имеют форму скругленного прямого угла.
6. Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы по п.1, отличающийся тем, что оси вращения нижних, верхних дугообразных опорных плеч и мобильной платформы соединены с нижними опорными плечами посредством активного сустава, включающего привод, обеспечивающий вращение верхних дугообразных опорных плеч.
7. Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы по п.1, отличающийся тем, что базовая ось соединена с активным базовым суставом, включающим привод вращения нижних дугообразных опорных плеч.
8. Параллельный сферический манипулятор асимметричного типа с тремя степенями свободы по п.1, отличающийся тем, что привод вращения выполнен в виде мотора с полым валом.
| CN 100544901 C, 30.09.2009 | |||
| CN 104908060 B, 18.05.2016 | |||
| CN 101301755 B, 27.10.2010 | |||
| БЕЗОПАСНЫЙ МОТОРИЗОВАННЫЙ ШАРНИР, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ОСНАЩЕНИЯ ЧЕЛОВЕКОПОДОБНОГО РОБОТА | 2015 |
|
RU2669130C2 |
| RU 2774278 C1, 16.06.2022. | |||

