Изобретение относится к безопасному моторизованному шарниру, предназначенному для установки между двумя конструктивными элементами человекоподобного робота. Если быть более точным, то оно касается моторизованного шарнира, безопасность которого обеспечивается посредством тормозного устройства, приводимого в действие по умолчанию путем пружинящего действия; причем исполнительное устройство позволяет осуществлять отключение тормозного устройства и освобождать работу шарнира.
Человеческое тело содержит очень большое количество суставов, обеспечивающих соединение между костями или частями тела. Насчитывается, например, около сорока суставов в нижней конечности человека, от тазобедренного сустава до щиколотки. Движение этих суставов осуществляется за счет мускулов, и суставы имеют различные формы для того, чтобы позволить выполнять различные движения. В человекоподобных роботах были предприняты многочисленные попытки по максимально возможному воспроизводству поведения и движения человека. Известны различные типы шарниров, способных посредством электрического двигателя приводить в движение один конструктивный элемент относительно другого в зависимости от одной до множества степеней подвижности.
Затруднительная ситуация возникает при выключении электропитания, которое может произойти, например, вследствие информационного сбоя или потери нагрузки батареи. Приведение в действие посредством электрического двигателя приостанавливается, шарнир оказывается свободным, а робот может упасть. Эта ситуация представляется тем более затруднительной, если робот большой и имеет увеличенную массу. В случае более широкого распространения роботов и использования их всем населением проявляется стремление повысить надежность применения человекоподобных роботов.
Изобретение направлено на то, чтобы предложить решение этой частной ситуации выключения электропитания в целях повышения надежности использования человекоподобных роботов, в частности больших роботов, и выполнить нормативные требования, предъявляемые в последнее время в данной области.
В связи с этим технической задачей изобретения является безопасный моторизованный шарнир, предназначенный для установки между первым и вторым конструктивными элементами человекоподобного робота, отличающийся тем, что он содержит:
двигатель, содержащий неподвижную часть, предназначенную для соединения с первым конструктивным элементом, и подвижную часть, которая может быть приведена в движение относительно неподвижной части и предназначена для соединения со вторым конструктивным элементом;
тормозное устройство, способное осуществлять усилие на подвижную часть двигателя путем пружинящего действия для препятствования движению подвижной части относительно неподвижной части;
исполнительное устройство, способное перемещать тормозное устройство, противодействуя пружинящему действию, таким образом, чтобы освобождать подвижную часть двигателя от тормозного усилия и создавать возможность двигателю приводить в движение подвижную часть относительно неподвижной части.
Предпочтительно, тормозное устройство рассчитано таким образом, чтобы мешать движению подвижной части относительно неподвижной части до усилия предварительно заданной пороговой величины; причем усилие, превышающее упомянутое усилие пороговой величины, прилагаемое между подвижной частью и неподвижной частью двигателя, образует движение подвижной части относительно неподвижной части.
Предпочтительно, шарнир рассчитан таким образом, что:
двигатель представляет собой электрический ротационный двигатель; причем неподвижная часть содержит основание и подвижную часть, содержащую вал, приводимый во вращение относительно основания, и барабан, жестко соединенный с валом;
тормозное устройство содержит башмак, который может быть перемещен между безопасным положением, в котором башмак, находящийся в контакте с барабаном, осуществляет усилие на барабан для того, чтобы помешать посредством трения вращению вала относительно основания, и рабочим положением, в котором башмак отделен от барабана, освобождая вал от тормозного усилия.
Предпочтительно, шарнир рассчитан таким образом, что:
барабан выполнен из метала и имеет по существу цилиндрическую форму;
башмак выполнен из эластомера и рассчитан таким образом, чтобы вступать в контакт с барабаном на радиальном участке барабана.
Предпочтительно, тормозное устройство содержит:
- закрепленный кронштейн, жестко соединенный с основанием;
подвижный рычаг, соединенный первой оконечностью с закрепленным кронштейном посредством шарнирного соединения с осью, по существу параллельной валу; причем башмак закреплен на подвижном рычаге;
винтовую пружину, накрученную вокруг оси шарнирного соединения и опирающуюся, с одной стороны, на закрепленный кронштейн, а с другой стороны, на подвижный рычаг для осуществления усилия, направленного на удаление друг от друга подвижного рычага и закрепленного кронштейна.
Предпочтительно, тормозное устройство содержит:
закрепленный кронштейн, жестко соединенный с основанием;
подвижный рычаг, соединенный первой оконечностью с закрепленным кронштейном посредством шарнирного соединения с осью, по существу параллельной основной оси вала; причем башмак закреплен на пластине, установленной на шаровой опоре на подвижном рычаге;
винтовую пружину, накрученную вокруг оси шарнирного соединения и опирающуюся, с одной стороны, на закрепленный кронштейн, а с другой стороны, на подвижный рычаг таким образом, чтобы осуществлять усилие, направленное на удаление друг от друга подвижного рычага и закрепленного кронштейна.
Предпочтительно, исполнительное устройство представляет собой линейное исполнительное устройство, содержащее корпус, жестко соединенный с основанием, и стержень, совершающий поступательные движения в корпусе и соединенный со второй оконечностью подвижного рычага; причем линейное исполнительное устройство рассчитано таким образом, чтобы создать возможность перемещения подвижного рычага во вращении относительно закрепленного кронштейна, противодействуя пружинящему действию, путем поступательного движения стержня в корпусе.
Предпочтительно, шарнир рассчитан таким образом, что подвижный рычаг имеет полукруглую форму между его первой и второй оконечностями, образуя полукрышку, частично покрывающую барабан.
Предпочтительно, шарнир содержит устройство с зубчатым зацеплением, приводимое в движение посредством подвижной части двигателя и предназначенное для соединения со вторым конструктивным элементом.
Предпочтительно, шарнир содержит средства для создания возможности перемещения тормозного устройства путем ручного вмешательства.
Предпочтительно, шарнир содержит средства измерения, способные определять перемещение тормозного устройства.
Изобретение также относится к человекоподобному роботу, содержащему моторизованный шарнир с отличительными особенностями, описание которых было приведено ранее.
Предпочтительно, робот содержит конструктивный элемент, похожий на бедро, и конструктивный элемент, похожий на туловище, которые имеют подвижные соединения посредством шарнира, как это было описано ранее.
Предпочтительно, робот содержит конструктивный элемент, похожий на ногу, и конструктивный элемент, похожий на бедро, которые имеют подвижные соединения посредством шарнира, как это было описано ранее.
Изобретение будет лучше понятно, а другие преимущества станут видны при изучении детального описания способа практического осуществления, приведенного в качестве примера, со ссылкой на следующие фигуры чертежа, на которых:
- фиг.1a и 1b изображают два примера человекоподобных роботов, которые могут быть оснащены безопасным шарниром согласно изобретению;
- фиг.2a и 2b изображают согласно первому виду в перспективе первый пример безопасного шарнира, соответственно, в безопасном положении и рабочем положении;
- фиг.3a, 3b и 3c изображают (вид сверху) пример безопасного шарнира, соответственно, в безопасном положении, рабочем положении и в двух наложенных друг на друга положениях;
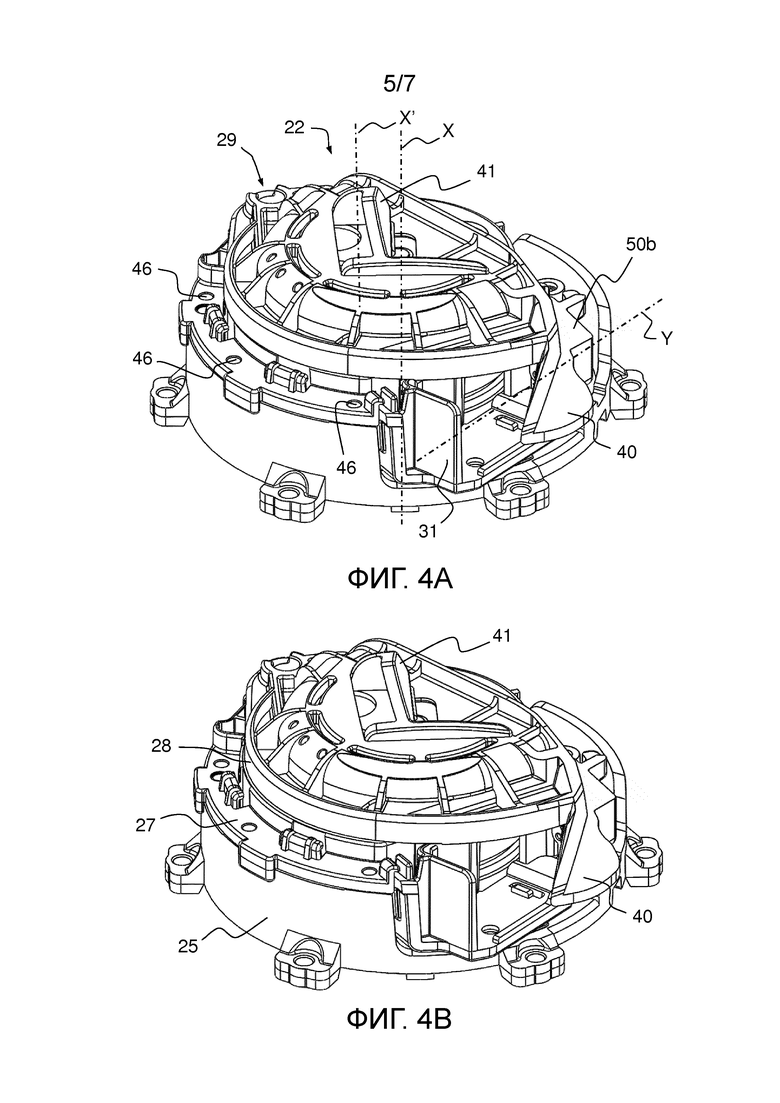
- фиг.4a и 4b изображают согласно второму виду в перспективе пример безопасного шарнира, соответственно, в рабочем положении и безопасном положении;
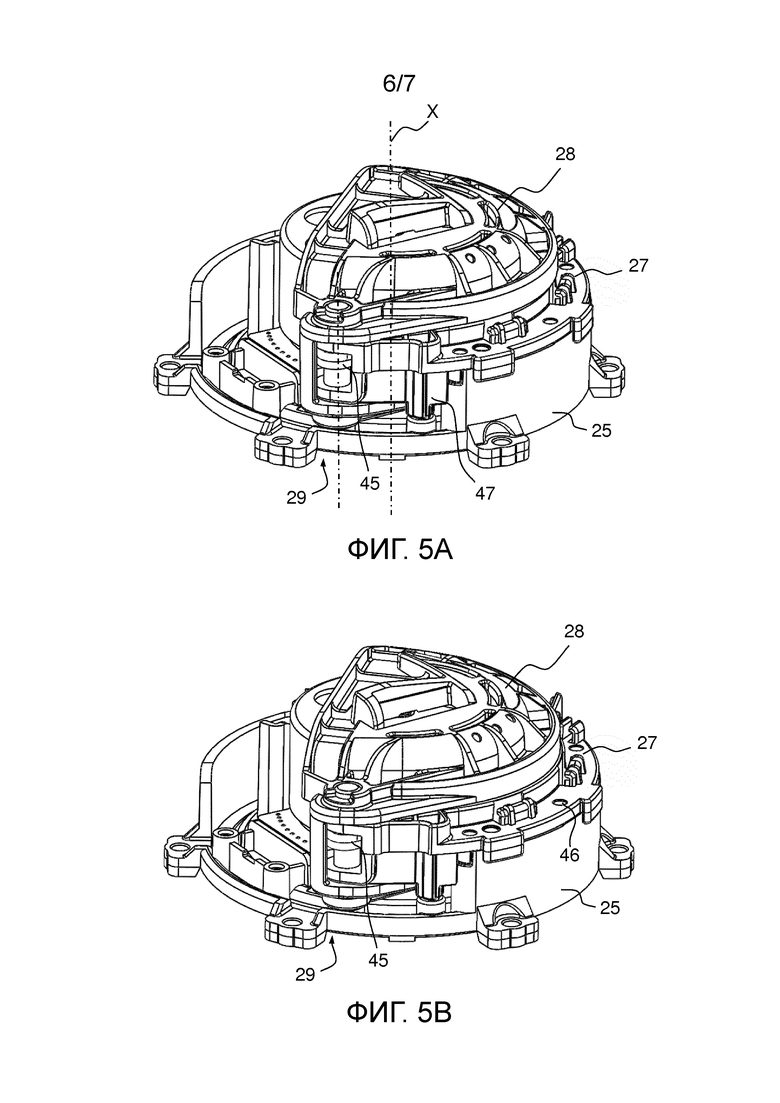
- фиг.5a и 5b изображают согласно третьему виду в перспективе пример безопасного шарнира, соответственно, в рабочем положении и безопасном положении;
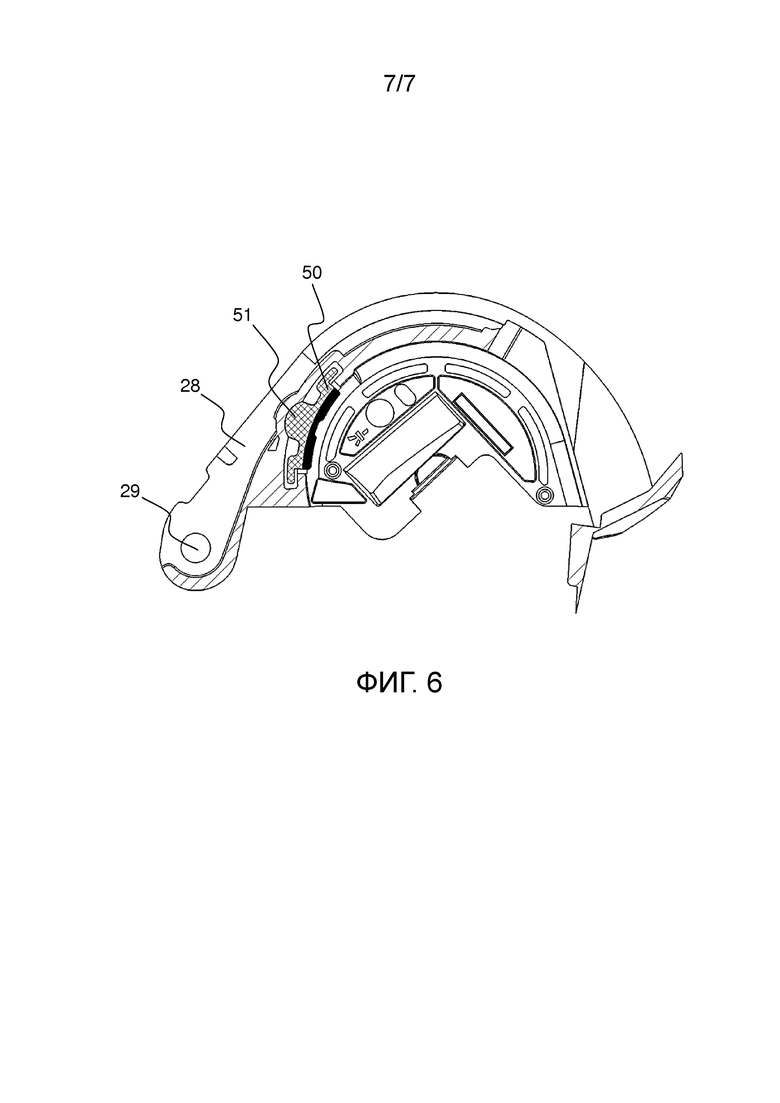
- фиг.6 изображает (вид снизу) второй пример безопасного шарнира.
Для большей ясности одни и те же конструктивные элементы на различных фигурах чертежа будут обозначаться одними и теми же цифровыми позициями.
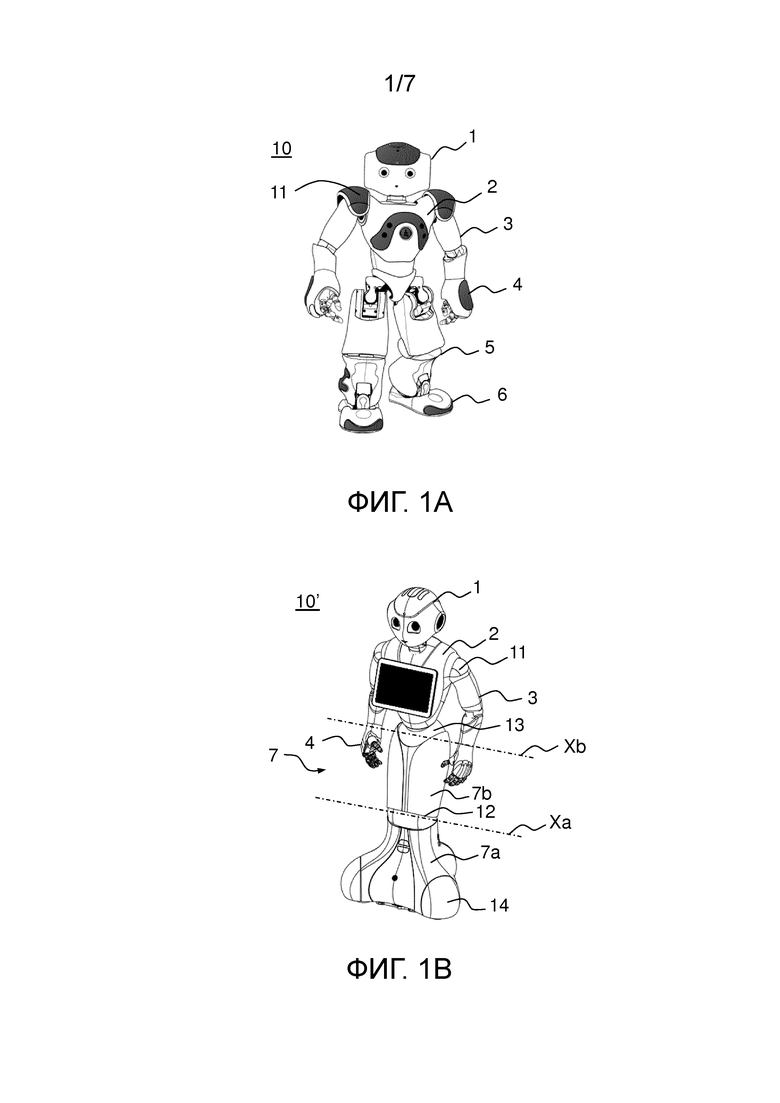
На фиг.1a и 1b изображены два примера человекоподобных роботов, разработанных компанией ALDEBARAN ROBOTICSTM. Человекоподобный робот 10, изображенный на фиг.1а, содержит голову 1, туловище 2, две руки 3, две кисти 4, две ноги 5 и две ступни 6. Человекоподобный робот 10', изображенный на фиг.1b, содержит голову 1, туловище 2, две руки 3, две кисти 4 и юбку 7. Эти два робота содержат множество шарниров, позволяющих осуществлять относительное перемещение различных конструктивных элементов робота для воспроизводства особенностей строения человеческого тела и его движений. Роботы 10 и 10' содержат, например, шарнир 11 между туловищем 2 и каждой рукой 3. Шарнир 11 моторизован и перемещается вокруг двух осей вращения для обеспечения движения рук 3 относительно туловища 2 аналогично возможным перемещениям, совершаемым плечом человека.
Человекоподобный робот 10 содержит также множество шарниров для приведения в движение ног робота и воспроизводства ходьбы, в частности шарниров, подобных тазобедренному суставу, - между туловищем и бедром, колену - между бедром и ногой и щиколотке - между ногой и ступней. Использовано множество форм моторизованных шарниров, приводящих в движение один из конструктивных элементов вокруг одной или множества степеней свободы при вращении.
Человекоподобный робот 10' имеет другую конструкцию. Для повышения устойчивости и опущения центра тяжести робот имеет не ногу, а юбку 7, содержащую в своем основании треногу 14, способную перемещать робота. Юбка также содержит первый шарнир 12, относящийся к колену, между ногой 7a и бедром 7b. Второй шарнир 13, относящийся к тазобедренному суставу, установлен между туловищем 2 и бедром 7b. Эти два шарнира 12 и 13 представляют собой моторизованные шарнирные соединения вокруг оси вращения. Ось вращения Xa шарнира 12 и ось вращения Xb шарнира 13 по существу параллельны оси, соединяющей два плеча робота, позволяя наклонять робота вперед или назад.
Человекоподобный робот 10', находящийся в положении стоя, имеет размер приблизительно 1,1-1,2 метра при общей массе приблизительно 25-30 кг. Специалисты стремятся обеспечить, чтобы верхняя часть робота не могла привести к вращению шарнира под воздействием тяжести собственного веса. Целью безопасного шарнира, согласно изобретению, является воспрепятствовать падению верхней части робота, например, от бедра до головы, в результате вращения вокруг шарнира 12 даже в случае выключения электропитания шарнира. Если быть более точным, то шарнир, согласно изобретению, позволяет блокировать вращение шарниров, когда верхняя часть робота находится внутри конуса с вертикальной осью и с углом порядка 10°.
Далее приводится описание изобретения для моторизованного шарнира с определенной степенью подвижности типа шарнирного соединения, применяемого в крупном роботе, похожем на человекоподобного робота 10', в частности для шарнирного соединения, похожего на колено или тазобедренный сустав. Безусловно, изобретение не ограничивается этим частным применением. В общем плане шарнир, согласно изобретению, предназначен для установки между первым и вторым конструктивными элементами робота, такого как человекоподобный робот, животноподобный робот или даже промышленный робот. Первый и второй конструктивные элементы, как правило, представляют собой механические узлы, которые стремятся перемещать относительно друг друга. Под термином «конструктивный элемент» в последующем понимается механический узел робота, такой как нога, бедро, туловище, голова, рука, кисть или их сочетание. Отметим также, что если на следующих фигурах чертежа детализируется частный пример шарнира типа шарнирного соединения с определенной степенью подвижности, то подразумевается, что изобретение в принципе применимо к любому типу шарнирных соединений, например, к шарнирному соединению с двумя степенями свободы при вращении или также к шарнирному соединению с одной или множеством степеней свободы при поступательном движении. В более общем смысле изобретение относится к шарниру, содержащему двигатель, который способен перемещать второй конструктивный элемент относительно первого конструктивного элемента.
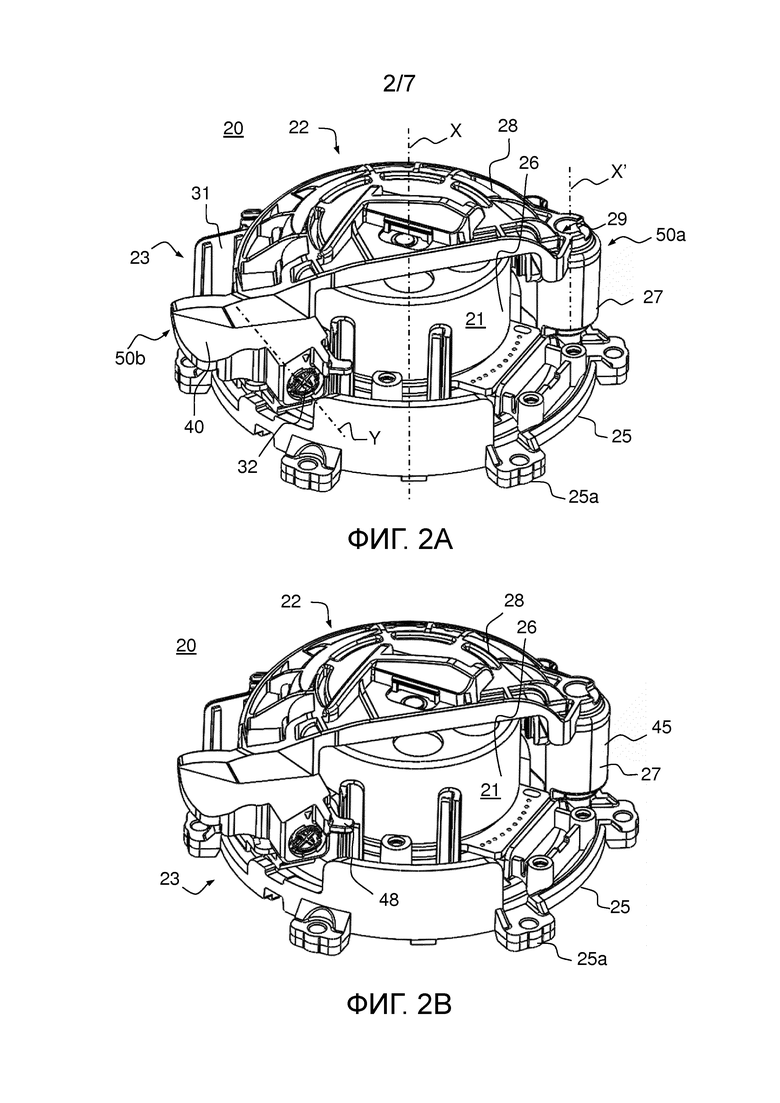
Фиг.2a и 2b изображают, согласно первому виду в перспективе, пример безопасного шарнира, соответственно, в безопасном положении и в рабочем положении. Шарнир 20 предназначен для установки между первым и вторым конструктивными элементами (на фигурах чертежа не показаны). Шарнир 20 содержит:
двигатель 21, способный приводить в движение второй конструктивный элемент относительно первого конструктивного элемента; причем двигатель содержит неподвижную часть, предназначенную для соединения с первым конструктивным элементом, и подвижную часть, приводимую в движение относительно неподвижной части и предназначенную для соединения со вторым конструктивным элементом;
тормозное устройство 22, способное оказывать воздействие на подвижную часть двигателя 21 в результате пружинящего действия для создания препятствия движению подвижной части относительно неподвижной части;
исполнительное устройство 23, способное перемещать тормозное устройство 22, противодействуя пружинящему действию, таким образом, чтобы освободить подвижную часть двигателя 21 от тормозного усилия и позволить двигателю 21 приводить в движение подвижную часть относительно неподвижной части.
Двигатель 21 является, предпочтительно, электрическим ротационным двигателем, содержащим основание двигателя 25 и вал, приводимый во вращение относительно основания 25 вокруг оси X. Основание двигателя 25 образует неподвижную часть двигателя и имеет основание в форме диска, предназначенное для крепления к первому конструктивному элементу робота посредством шести лап для закрепления 25a, рассредоточенных в угловом направлении вокруг основания. Вал (на фигурах чертежа не виден) образует подвижную часть двигателя и жестко соединен с барабаном двигателя 26, имеющим по существу цилиндрическую форму. Вал проходит через основание двигателя и предназначен для соединения со вторым конструктивным элементом, предпочтительно, посредством устройства зубчатого зацепления (не показано). Сконструированный таким образом электрический двигатель 21 позволяет приводить вал во вращение относительно основания, приводя во вращение второй конструктивный элемент относительно первого конструктивного элемента.
Шарнир 20 также содержит тормозное устройство 22. На фиг.2a шарнир изображен в безопасном положении, в котором тормозное устройство оказывает воздействие на подвижную часть двигателя для того, чтобы помешать приведению во вращение вала. Как показано на фиг.2b, шарнир изображен в рабочем положении, в котором тормозное устройство перемещается таким образом, чтобы освободить двигатель от воздействия при торможении и позволить привести вал во вращение. В безопасном положении тормозное устройство 22 воздействует на барабан двигателя 21, предпочтительно, выполненный из металла, посредством башмака, предпочтительно, выполненного из эластомера, вступающего в соприкосновение с цилиндрическим барабаном на участке его радиального сечения. Башмак воздействует на барабан двигателя для того, чтобы воспрепятствовать, в результате трения, вращению вала относительно основания.
В представленном примере тормозное устройство 22 содержит закрепленный кронштейн 27, жестко соединенный с основанием двигателя 25, и подвижный рычаг 28. Подвижный рычаг 28 имеет полукруглую форму, расположенную между первой оконечностью 50a и второй оконечностью 50b, образуя полукрышку, закрывающую частично барабан двигателя. Подвижный рычаг 28 соединен первой оконечностью 50a с закрепленным кронштейном 27 посредством шарнирного соединения 29 с осью Xʹ, которая по существу параллельна оси X вращения вала. В этом первом примере шарнира башмак закреплен на внутренней поверхности подвижного рычага таким образом, чтобы вступать в контакт с радиальной поверхностью барабана 26 при вращении подвижного рычагa вокруг своей оси Xʹ. Башмак закреплен по существу на одинаковом расстоянии от первой и второй оконечностей 50a 50b подвижного рычага 28. Тормозное устройство 22 также содержит пружинно-инерционный механизм, предпочтительно, цилиндрическую винтовую пружину 45, накрученную вокруг оси Xʹ и опирающуюся на закрепленный кронштейн 27 и на подвижный рычаг 28 для оказания воздействия, стремясь при этом удалить друг от друга подвижный рычаг и закрепленный кронштейн. Усилие, оказываемое пружиной между подвижным рычагом и закрепленным кронштейном, передается на башмак, контактирующий с барабаном, позволяя блокировать вал во время вращения. По умолчанию, шарнир заблокирован при вращении.
Шарнир также содержит исполнительное устройство 23, способное перемещать тормозное устройство, противодействуя пружинящему действию, для того, чтобы освободить двигатель от тормозного усилия и позволить двигателю привести вал во вращение. Согласно представленному примеру, линейное исполнительное устройство (не показано) установлено между закрепленным кронштейном 27 и второй оконечностью 50b подвижного рычага 28. Линейное исполнительное устройство содержит подвижный стержневой контакт, совершающий поступательные движения между двумя положениями по оси Y, внутри чехла. Чехол закреплен на державке 31, жестко соединенной с закрепленным кронштейном 27. Конец стержневого контакта имеет сферическую форму, которая взаимодействует с отпечатком шарика 32, выполненным в подвижном рычаге 28. Длина хода стержневого контакта между его двумя положениями определяет ход подвижного рычага между безопасным положением и рабочим положением. По умолчанию, например, когда шарнир не обеспечивается электропитанием, стержневой контакт удерживается под действием пружины в своем самом удаленном положении. И наоборот, когда шарнир обеспечивается электропитанием, исполнительное устройство может управляться для втягивания стержневого контакта в чехол, производя усилие, противодействующее пружинящему действию. Рассматриваются различные способы практического осуществления линейного исполнительного устройства, в частности линейное исполнительное устройство, управляемое посредством электромагнита.
Шарнир также содержит средства ручного перемещения тормозного устройства для освобождения вращательного движения двух конструктивных элементов. В частности, на подвижном рычаге, рядом с его второй оконечностью 50b, выполнена наклонная плоскость 40 таким образом, что инструмент, перемещаемый параллельно оси X вращения вала и против этой наклонной плоскости 40, может перемещать подвижный рычаг из безопасного положения к рабочему положению, противодействуя пружинящему действию. Вторая наклонная плоскость 41, которая показана на фиг.4а и 4b, также выполнена рядом с центром полукруглой формы подвижного рычага. На практике моторизованный шарнир, изображенный на фигурах чертежа, встроен в робота, внутри внешней оболочки, изображенной на фиг.1a и 1b, придавая роботу эстетически красивый внешний вид. Предпочтительно, внешняя оболочка содержит отверстие, выполненное против наклонной плоскости шарнира, которое позволяет осуществлять введение одного ключа, адаптированного для освобождения тормозного устройства и обеспечения возможности складывать или раскладывать вручную шарнирно соединенные конструктивные элементы.
Согласно аспекту изобретения, обеспечение безопасности шарнира заключается, таким образом, в оснащении приводного электродвигателя тормозным механизмом, приводимым в действие по умолчанию посредством пружинно-инерционного механизма, и средствами отключения тормозного механизма, противодействуя пружинно-инерционному механизму. Таким образом, шарнир блокируется в случае выключения питания шарнира, связанного с разрядкой батареи, информационного сбоя или принудительной аварийной остановки. Средства отключения тормозного механизма включают в себя средства, управляемые посредством электроники, что является задачей исполнительного устройства, и средства ручного управления, что является задачей наклонных плоскостей.
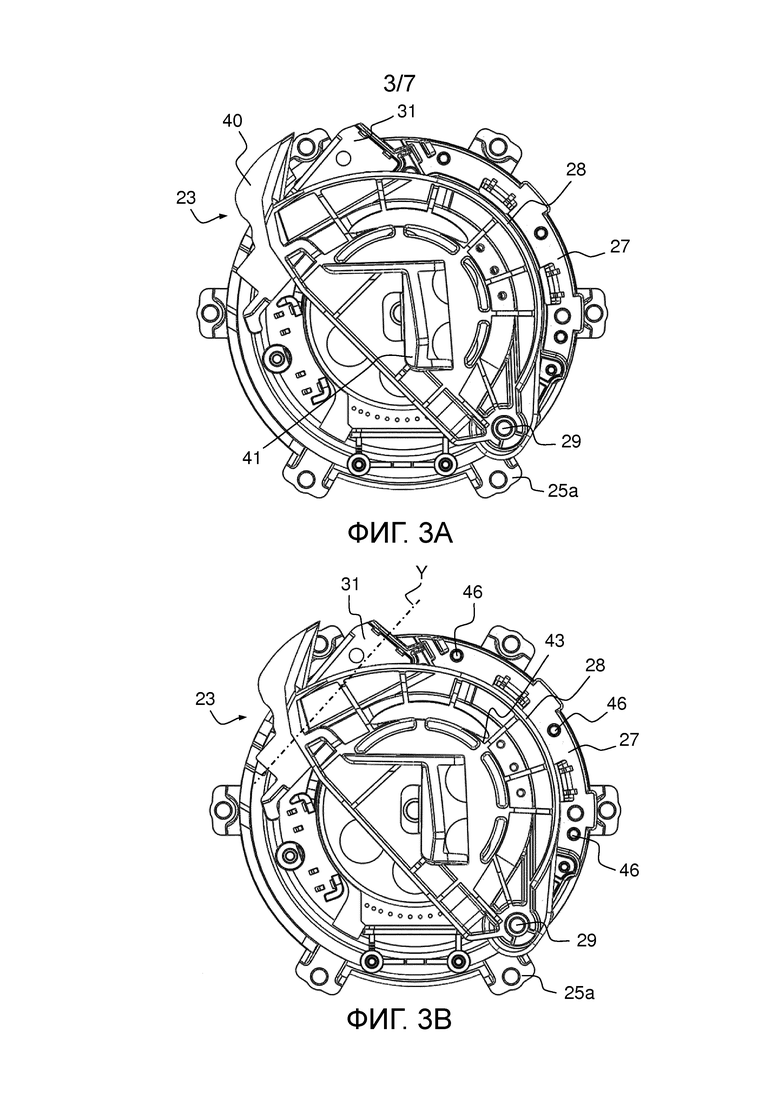
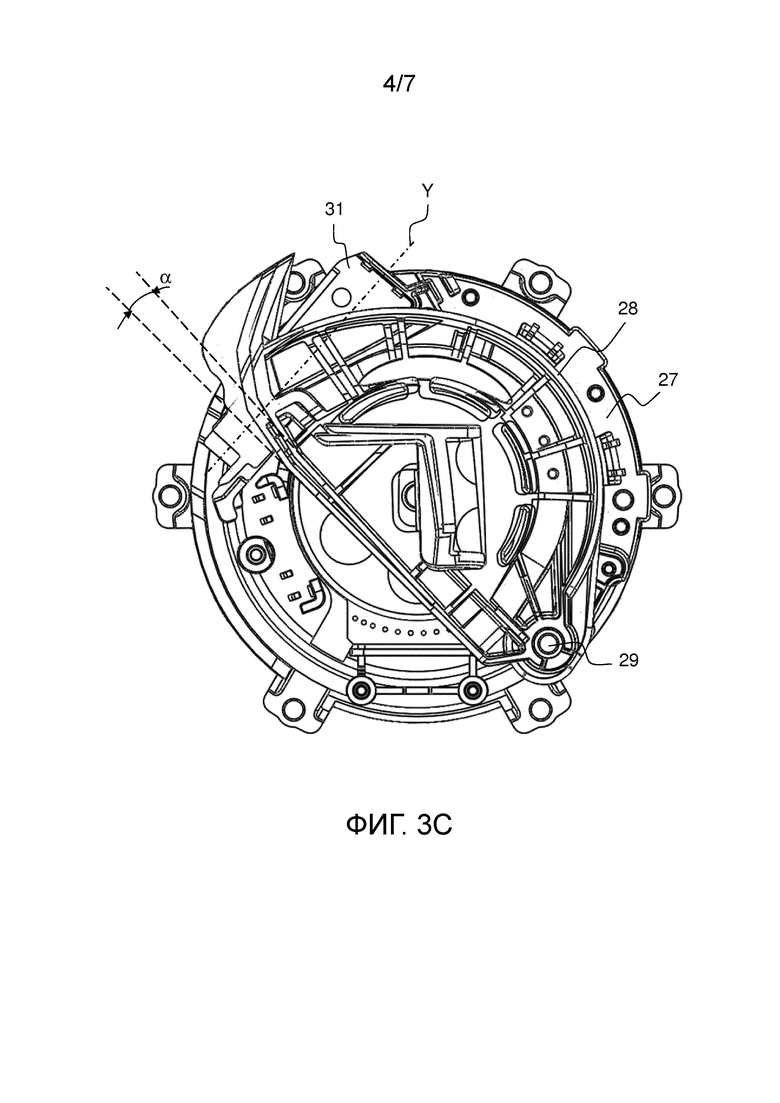
Фиг.3a, 3b и 3c изображают вид сверху примера безопасного шарнира, соответственно, в безопасном положении, рабочем положении и в двух положениях, наложенных друг на друга. Согласно представленному примеру, диаметр основания двигателя составляет приблизительно 90 мм, высота шарнира - приблизительно 40 мм. В безопасном положении подвижный рычаг 28 прижимает башмак, выполненный из эластомера, к барабану двигателя 26. Полукруглая форма подвижного рычага является предпочтительной. Она позволяет принимать форму подвижного барабана таким образом, чтобы башмак, выполненный из эластомера, мог бы установить контакт с барабаном на протяжении радиального участка вала. Башмак не виден на фигурах чертежа, его расположение показано при помощи цифровой позиции 43. Как правило, применяется башмак по существу прямоугольной формы высотой и шириной приблизительно 15 мм. Полукруглая форма также позволяет обеспечить безопасность шарниров в ограниченном пространстве. Обычно длина хода 2,5 мм линейного исполнительного устройства соответствует углу α в 4°, отделяющему безопасное положение от рабочего положения. Отметим также, что шарнир, предпочтительно, предназначен для соединения с двумя конструктивными элементами робота таким образом, чтобы подвижный рычаг полукруглой формы был бы размещен в верхней части барабана двигателя. Имеющая такую форму подвижная часть тормозного устройства прижимает башмак не только в результате пружинящего действия, но и естественным путем под воздействием силы тяжести. В случае отсутствия энергии и ослабления силы возвратных пружин шарнир продолжает, естественно, тормозиться башмаком.
Шарнир остается заблокированным, пока внешнее усилие, приложенное между подвижной частью и неподвижной частью двигателя, остается меньше усилия, оказываемого на двигатель тормозным устройством. Когда усилие, прилагаемое между подвижной частью и неподвижной частью двигателя, больше усилия, прилагаемого тормозным устройством, подвижная часть приводится в движение. Если сила трения является недостаточной для остановки барабана против башмака, вал скользит во вращении, несмотря на торможение, производимое башмаком. Подвижная часть тормозится, но не становится неподвижной. Другими словами, контакт, образуемый в результате трения между башмаком 43 и барабаном 26, позволяет осуществлять торможение, но без обязательной остановки вращения барабана 26. Эта отличительная особенность позволяет на выбор тормозить или останавливать барабан 26. Кроме того, контакт осуществляется посредством подвижного рычага 28 полукруглой формы, результатом чего, с технической точки зрения, является повторение формы барабана с более хорошим контактом и обеспечение безопасности шарнира в небольшом пространстве.
Представляется возможным путем соответствующего расчета размеров пружины и башмака установить усилие, оказываемое на двигатель в результате пружинящего действия. Другими словами, тормозное устройство может быть рассчитано для воспрепятствования движению подвижной части относительно неподвижной части до усилия предварительно заданной пороговой величины; причем усилие, превышающее это усилие пороговой величины, оказываемое между подвижной частью и неподвижной частью, приводит к образованию движения подвижной части относительно неподвижной части.
Способность корректировать значение этого усилия пороговой величины представляет собой особенно предпочтительную отличительную особенность изобретения. Становится возможным адаптировать поведение шарнира к условиям обстановки. В случае человекоподобного робота 10' усилие пороговой величины определено таким образом, что шарнир остается заблокированным при вращении, в то время как верхняя часть робота (включая в данном случае бедро 7b, туловище 2, руки 3 и голову 1) находится внутри конуса с вертикальной осью и углом порядка 10°. За пределами этого конуса усилие, оказываемое на шарнир в результате воздействия силы тяжести верхней части робота, больше усилия пороговой величины, и конструктивные элементы приводятся во вращение; шарнир просто тормозится. Скорость вращения, которое тормозится, предпочтительно, рассчитывается путем расчета размеров башмака и пружины. Вращательное движение, которое тормозится, также предпочтительно для обеспечения безопасности шарнира, не допуская при этом разрушения составных элементов, на которые оказываются сильное воздействие. Другими словами, это позволяет сохранить подвижность конструктивных элементов, задействованных в схеме шестерен, следующих за двигателем. Эта подвижность позволяет, например, выдерживать сильный удар по шарниру, используя систему торможения в ее положении трения, поскольку шестерни смогут поворачиваться даже медленно для того, чтобы погасить энергию удара. Согласно гипотезе, противоположной блокировке шарнира механическими средствами, независимыми от оказываемого усилия, сила ударного действия в случае падения или сильного удара будет передаваться на всю цепочку приведения в движение шарнира, приводя в конечном итоге к разрушению наиболее хрупких составных элементов, например, двигателя или устройства с зубчатым зацеплением.
Это осуществление тормозного устройства, действующего на фрикционных принципах, является предпочтительным, поскольку оно определяет две области применения, в том числе: первую область, в которой шарнир заблокирован, все усилия, прилагаемые между конструктивными элементами, не приводят к движению шарнира, и вторую область, в которой усилие, прилагаемое между конструктивными элементами, приводит к движению конструктивных элементов; шарнир тормозится.
Фиг.4a и 4b (второй вид в перспективе) изображают пример безопасного шарнира, соответственно, в безопасном положении и рабочем положении. Этот второй вид иллюстрирует размещение линейного исполнительного устройства на основании двигателя 25, рядом со второй оконечностью 50b подвижного рычага 28. Линейное исполнительное устройство содержит корпус, закрепленный на опоре 31, выполненной в закрепленном кронштейне 27, и стержень, сферическая оконечность которого взаимодействует с отпечатком шарика 32, выполненным в подвижном рычаге, для образования шаровой опоры. В случае отсутствия электропитания или команды исполнительного устройства стержень удерживается в сжатом состоянии под воздействием пружины. Совершение стержнем поступательного движения по оси Y, управляемое линейным исполнительным устройством, позволяет противодействовать пружинящему действию и освободить вал от воздействия тормозного устройства.
Предпочтительно, закрепленный кронштейн 27 и подвижный рычаг 28 выполнены из термопластичного материала, усиленного стекловолокном, предпочтительно, типа PA66-GF35. Различные компоненты, например, опора 31, могут быть закреплены на подвижном рычаге способом типа повторного формования. Башмак может быть выполнен из эластомера на базе полиуретана. Башмак, предпочтительно, прикреплен к подвижному рычагу способом типа двойной инжекции, позволяющим обеспечить молекулярное сцепление, приведенное в соответствие с усилиями, которые могут прилагаться к башмаку.
Предпочтительно, совокупность, включающая в себя закрепленный кронштейн, подвижный рычаг, башмак, винтовую пружину и исполнительное устройство, собирается на первом этапе. Предварительно собранная совокупность затем устанавливается на основании двигателя 25. В связи с этим основание двигателя и закрепленный кронштейн содержат средства, позволяющие заранее расположить совокупность относительно двигателя, до крепления посредством трех крепежных полостей 46, выполненных в закрепленном кронштейне и основании двигателя.
Фиг.5a и 5b (третий вид в перспективе) изображают пример безопасного шарнира, соответственно, в безопасном положении и рабочем положении. На этом последнем виде в перспективе показана деталь шарнирного соединения 29 между закрепленным кронштейном 27 и подвижным рычагом 28. Пружина 45 накручена вокруг оси X' и упирается в поверхность подвижного рычага и поверхность закрепленного кронштейна для приложения усилия, направленного на удаление друг от друга закрепленного кронштейна и подвижного рычага.
Предпочтительно, закрепленный кронштейн также содержит средства 47 отбора усилия, между основанием двигателя и закрепленным кронштейном, позволяющие осуществлять передачу усилия, оказываемого пружиной на закрепленный кронштейн, к основанию двигателя.
Также рассматривалось закрепление средства измерения положения подвижного рычага; причем информация об измеренном положении передается в электронное контрольное устройство для управления моторизованным шарниром. В частности, рассматривались средства оптического измерения. Для этого подвижный рычаг содержит оконечность 48 (показана на фиг.2b), рассчитанную таким образом, чтобы перехватывать - исключительно в безопасном положении - оптический пучок, ось которого параллельна оси X.
Фиг.6 изображает (вид снизу) второй пример безопасного шарнира. Этот второй пример шарнира имеет множество сходств с первым примером, описание которого уже было приведено. Как и ранее, тормозное устройство содержит закрепленный кронштейн, жестко соединенный с основанием, и подвижный рычаг 28, соединенный с закрепленным кронштейном посредством шарнирного соединения 29. На фиг.6 изображен только подвижный рычаг 28 тормозного устройства. Определение и принцип работы других компонентов, таких как двигатель, исполнительное устройство или закрепленный кронштейн тормозного устройства, детально и систематически вновь не рассматриваются.
Этот второй пример шарнира отличается от первого примера определением башмака, вступающего в контакт с барабаном двигателя. В этом втором примере башмак 50, предназначенный для установления контакта с барабаном двигателя для производства торможения этого последнего, установлен на пластине 51, установленной на шаровой опоре на подвижном рычаге 28. Пластина 51 имеет особенную форму, сконструированную таким образом, чтобы двигаться под совместным воздействием статической и динамической касательных сил трения и давления. Эта симметричная деформация возможна независимо от направления вращения барабана двигателя.
Изобретение относится к моторизованному шарниру для подвижного соединения элементов человекоподобного робота. Шарнир содержит электрический роторный двигатель, содержащий неподвижную часть для соединения с первым конструктивным элементом, и подвижную часть, которая может быть приведена в движение относительно неподвижной части и предназначена для соединения со вторым конструктивным элементом относительно первого конструктивного элемента, тормозное устройство, воздействующее на подвижную часть двигателя путем пружинящего действия, для воспрепятствования движению подвижной части относительно неподвижной части, исполнительное устройство, выполненное с возможностью перемещения тормозного устройства, противодействуя пружинному эффекту, таким образом, чтобы освободить подвижную часть двигателя от усилия тормозного устройства и позволить двигателю приводить в движение подвижную часть относительно неподвижной части. Изобретение обеспечивает повышение надежности использования человекоподобных роботов. 2 н. и 10 з.п. ф-лы, 12 ил.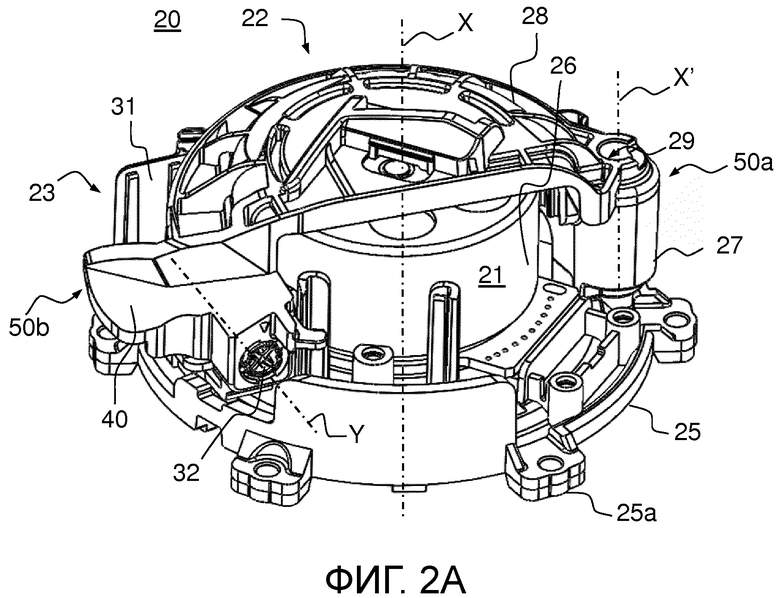
1. Моторизованный шарнир для человекоподобного робота, предназначенный для установки между первым и вторым элементами (7a, 7b) человекоподобного робота (10’), содержащий:
двигатель (21), содержащий неподвижную часть (25), предназначенную для соединения с первым элементом (7a), и подвижную часть (26), приводимую в движение относительно неподвижной части (25) и предназначенную для соединения со вторым элементом (7b);
тормозное устройство (22), выполненное с возможностью приложения усилия на подвижную часть (26) двигателя (21) посредством пружинного эффекта и препятствования движению подвижной части (26) относительно неподвижной части (25);
исполнительное устройство (23), выполненное с возможностью перемещения тормозного устройства (22), противодействуя пружинному эффекту, таким образом, чтобы освободить подвижную часть (26) двигателя (25) от усилия тормозного устройства (22) и позволить двигателю (21) приводить в движение подвижную часть (26) относительно неподвижной части (25),
отличающийся тем, что двигатель (21) представляет собой электрический роторный двигатель, причем неподвижная часть содержит основание (25), а подвижная часть содержит вал, приводимый во вращение относительно основания (25), и барабан (26), жестко соединенный с валом, при этом тормозное устройство (22) содержит башмак (50), выполненный с возможностью перемещения между безопасным положением, в котором башмак, находясь в контакте с барабаном (26), прикладывает усилие на барабан (26) таким образом, чтобы препятствовать путем трения вращению вала относительно основания (25), и рабочим положением, в котором башмак отделен от барабана (26), освобождая вал от усилия тормозного устройства (22),
при этом барабан (26) выполнен из металла и имеет по существу цилиндрическую форму, а башмак (50) выполнен из эластомера и имеет возможность вступать в контакт с барабаном (26) на радиальном участке барабана (26).
2. Шарнир по п.1, в котором тормозное устройство (22) выполнено с возможностью препятствования движению подвижной части (26) относительно неподвижной части (25) до усилия предварительно заданного порогового усилия, причем усилие, превышающее пороговое усилие, прилагаемое между подвижной частью (26) и неподвижной частью (25) двигателя (21), приводит в движение подвижную часть (26) относительно неподвижной части (25).
3. Шарнир по п.1, в котором тормозное устройство содержит:
неподвижный кронштейн (27), жестко соединенный с основанием (25);
подвижный рычаг (28), соединенный первой оконечностью с неподвижным кронштейном (27) посредством шарнирного соединения (29) с осью (X’), по существу параллельной основной оси (X) вала, причем башмак закреплен на подвижном рычаге (28);
винтовую пружину (45), накрученную вокруг оси (X’) шарнирного соединения и опирающуюся с одной стороны на неподвижный кронштейн (27), а с другой стороны на подвижный рычаг (28) таким образом, чтобы прикладывать усилие, направленное на удаление друг от друга подвижного рычага (28) и закрепленного кронштейна (27).
4. Шарнир по п.1 или 2, в котором тормозное устройство содержит:
неподвижный кронштейн (27), жестко соединенный с основанием (25);
подвижный рычаг (28), соединенный первой оконечностью с неподвижным кронштейном (27) посредством шарнирного соединения (29) с осью (X’), по существу параллельной основной оси (X) вала; причем башмак (50) закреплен на пластине (51), установленной на шаровой опоре на подвижном рычаге (28);
винтовую пружину (45), накрученную вокруг оси (X’) шарнира и опирающуюся с одной стороны на неподвижный кронштейн (27), а с другой стороны на подвижный рычаг (28) таким образом, чтобы прикладывать усилие, направленное на удаление друг от друга подвижного рычага (28) и неподвижного кронштейна (27).
5. Шарнир по п.3, в котором исполнительное устройство (23) представляет собой линейное исполнительное устройство, содержащее корпус, жестко соединенный с основанием (25), и подвижный стержень, совершающий поступательные движения в корпусе и соединенный со второй оконечностью подвижного рычага (28), причем линейное исполнительное устройство выполнено таким образом, чтобы позволить поворотное перемещение подвижного рычага (28) относительно неподвижного кронштейна (27), противодействуя пружинному эффекту, путем поступательного перемещения стержня в корпусе.
6. Шарнир по п.5, в котором подвижный рычаг (28) имеет полукруглую форму между своей первой и второй оконечностями, образуя полукрышку, частично покрывающую барабан (26).
7. Шарнир по п.1, содержащий устройство с зубчатым зацеплением, приводимое в действие подвижной частью (26) двигателя (21) и предназначенное для соединения со вторым элементом (7b).
8. Шарнир по п.1, содержащий средства (40, 41) для обеспечения перемещения тормозного устройства (22) путем ручного вмешательства.
9. Шарнир по п. 1, содержащий измерительные средства (48), способные определять перемещение тормозного устройства (22).
10. Человекоподобный робот, содержащий моторизованный шарнир (12, 13) по любому из пп.1-9.
11. Робот по п.10, содержащий элемент подобный бедру (7b) и элемент подобный туловищу (2), поворотно соединенные посредством упомянутого шарнира (13).
12. Робот по п.10 или 11, содержащий элемент подобный ноге (7a) и конструктивный элемент подобный бедру (7b), поворотно соединенные посредством шарнира (12).
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| ЗУБЧАТЫЙ ВЕНЕЦ ПОВОРОТНОГО МЕХАНИЗМА ОДНОКОВШОВОГО ЭКСКАВАТОРА | 0 |
|
SU176204A1 |
| US 2013039730 A1, 14.02.2013 | |||
| US 4693665 A, 15.09.1987. | |||

