Радиолокационная станция охраны объектов «Сова»
Настоящее изобретение относится к области радиолокации, в частности к радиолокационным средствам автоматического обнаружения, распознавания и сопровождения различных типов подвижных объектов (людей, наземного и водного транспорта, низколетящих малоразмерных целей и др.) в любое время суток и времени года, в том числе в условиях отсутствия оптической видимости, таких как: запыленность и задымленность атмосферы, туман, осадки и т.п. и представляет собой твердотельную когерентную доплеровскую радиолокационную станцию (РЛС) непрерывного излучения с линейной частотной модуляцией (ЛЧМ) с возможностью аппаратно-программного комплексирования с оптико-электронными приборами.
РЛС «Сова» предназначена для работы на открытом воздухе, и может автономно использоваться как средство радиолокационного кругового наблюдения за охраняемым сухопутным или водным участком местности (границы, стратегические объекты, гидроэлектростанции, аэродромы и пр.) на дальностях до 20 км, а также в качестве радиолокационного датчика в составе систем охраны с сетевой архитектурой построения.
Известна переносная РЛС, которая содержит антенный пост и связанное с антенным постом опорно-поворотное устройство, выполненное с возможностью закрепления на штативе. Антенный пост соединен кабельной сетью с блоком электропитания и рабочим местом оператора, представляющим собой геоинформационную систему, сопряженную с встроенной в станцию системой спутниковой навигации (RU 88815, опубликован 20.11.2009). Переносная РЛС предназначена для слежения за наземными и/или надводными объектами с максимальной дальностью обнаружения объекта типа грузовой автомобиль до 13 км и не предусматривает сопряжение с оптико-электронными приборами и интеграцию станции в сетевые охранные системы.
Техническая проблема заключается в расширении функциональных возможностей.
Технический результат заявленного изобретения заключается в обеспечении возможности автоматического обнаружения и сопровождения не только движущихся наземных и надводных целей, но и воздушных (парашютисты, планеристы, беспилотные летательные аппараты); автоматического распознавания типа цели (техника-человек) за время прохода диаграммы направленности антенны по цели, кругового или секторного обзора пространства; сопряжения и наведения на обнаруженную цель оптико-электронного прибора (ОЭП); отображения радиолокационной и видеоинформации на едином дисплее любой ПЭВМ; работы в охранных системах с сетевой архитектурой.
Указанный технический результат обеспечивается посредством следующей совокупности признаков.
Радиолокационная станция охраны объектов, содержащая приемопередающее устройство, двухкоординатное опорно-поворотное устройство, выполненное с возможностью крепления на треноге, сетевой блок питания, при этом приемопередающее устройство выполнено в едином корпусе и содержит волноводно-щелевые приемную и передающую антенны, приемопередающий блок, обеспечивающий непрерывную генерацию зондирующего сигнала с линейной частотной модуляцией (ЛЧМ), блок первичной обработки информации, вычислительное устройство, вторичный источник питания, а также содержит с возможностью демонтажа приемник GPS/ГЛОНАСС, антенну приемника GPS/ГЛОНАСС, малогабаритный оптико-электронный прибор и модуль видеозахвата, выполненный с возможностью приема аналогового сигнала от малогабаритного оптико-электронного прибора, оцифровки, обработки аналогового видеосигнала и его передачи на вычислительное устройство, при этом блок первичной обработки информации содержит дополнительный информационный выход, а вычислительное устройство дополнительно содержит информационный вход, образующие звуковой канал, вычислительное устройство выполнено на одноплатной ЭВМ и обеспечивает возможность выполнения функций управления, вторичной обработки радиолокационных и оптических данных, формирования пакета данных об обнаруженных целях на дальностях до 20 км и последующего обмена данными со средством управления и индикации, по проводному интерфейсу Ethernet, сетевому протоколу TCP/IP или беспроводному каналу Wi-Fi, опорно-поворотное устройство соединено с приемопередающим устройством с помощью кабеля и выполнено с возможностью автоматического сканирования приемопередающего устройства по азимуту и углу места, а также перехода в режим предварительного подогрева при рабочей температуре ниже минус 10°C, сетевой блок питания соединен кабелем с опорно-поворотным устройством, кабель управления соединяет опорно-поворотное устройство со средством управления и индикации.
Корпус приемопередающего устройства выполнен герметичным из высокопрочного алюминиевого сплава, передней стенкой которого является антенный блок, защищенный от внешних воздействий радиопрозрачным полотном.
На углах корпуса установлены упоры, на противоположных сторонах верхней части корпуса выполнены два симметричных отсека под размещение антенн навигационной аппаратуры, сверху отсеки закрыты герметичными радиопрозрачными крышками.
Радиолокационная станция дополнительно содержит треногу для установки на нее двухкоординатного опорно-поворотного устройства, где тренога содержит алюминиевый штатив и узел ориентирования и горизонтирования.
Узел ориентирования и горизонтирования установлен на плоской площадке штатива с возможностью крепления посредством рукоятки.
Верхняя часть узла снабжена пузырьковым уровнем для контроля горизонтального положения приемопередающего устройства.
Кабель выполнен в герметичном корпусе с крышкой для доступа к внутреннему монтажу.
Основные характеристики РЛС «Сова»
1 Рабочий диапазон частот - 13400…13600 МГц.
2 Максимальная дальность обнаружения цели при вероятности обнаружения 0,8 и вероятности ложной тревоги не более одной в полчаса:
- человек - не менее 8 км;
- грузовой автомобиль - не менее 20 км.
3 Срединные ошибки определения координат без учета ошибок топопривязки и ориентирования:
- по дальности - не более 5 м;
- по направлению - не более 0,5 градуса.
4 Разрешающая способность:
- по дальности - не более 30 м;
- по направлению - не более 3,6 градуса.
5 Вероятность распознавания типов целей (человек-техника):
- автоматически - не менее 0,8;
- оператором по звуковому каналу - не менее 0,9.
6 Минимальная дальность обнаружения - не более 50 м.
7 Время непрерывной работы от сети переменного тока - круглосуточно.
8 Время непрерывной работы от штатной аккумуляторной батареи:
- не менее 10 часов при положительных температурах окружающей среды;
- не менее 4 часов при работе при температуре минус 30°C.
9 Средняя угловая скорость сканирования по азимуту 7%.
10 Масса не более 25 кг.
Описание конструкции РЛС «Сова» Полезная модель поясняется рисунками, где:
- на фиг. 1 изображена РЛС «Сова» в рабочем положении (вид спереди);
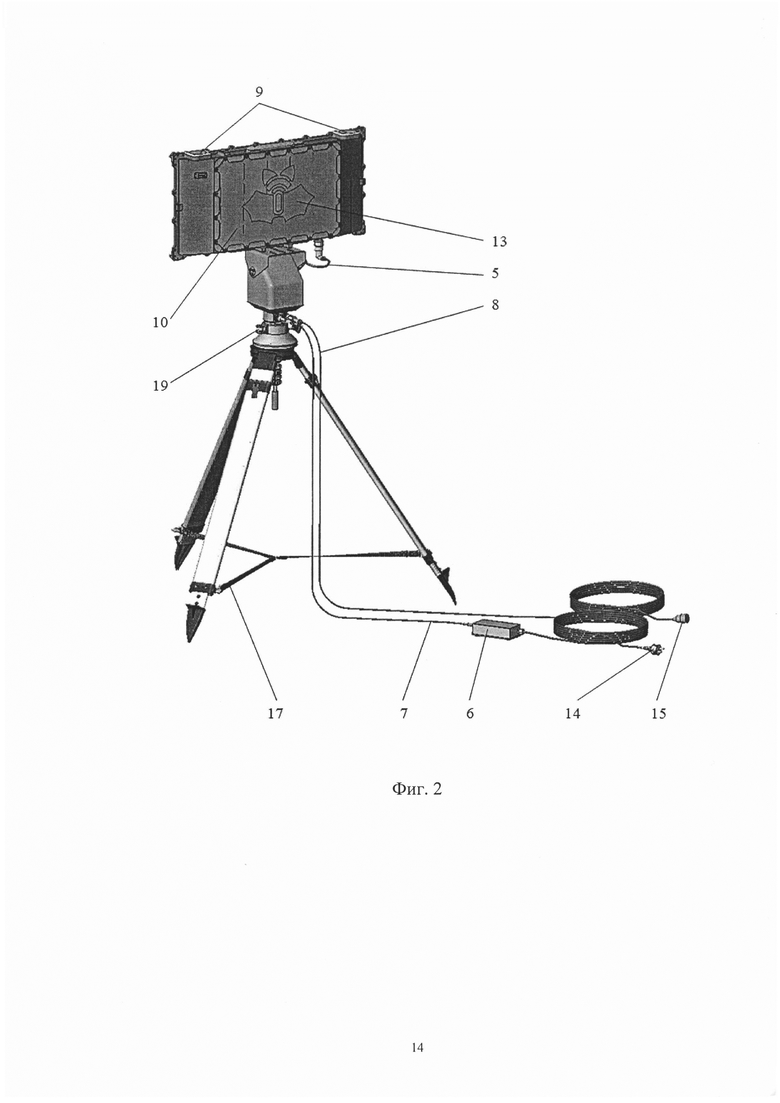
- на фиг. 2 изображена РЛС «Сова» в рабочем положении (вид сзади);
- на фиг. 3 представлена структурная схема РЛС «Сова».
Изображенная на фиг. 1РЛС «Сова» состоит из ППУ (1), установленного на опорно-поворотном устройстве (ОПУ) 2, закрепленном на треноге 3 посредством узла ориентирования и горизонтирования 4. Электрическое соединение между ППУ и ОПУ выполнено кабелем 5. Сетевой блок питания 6 соединен кабелем 7 с одним из разъемов ОПУ, кабель управления 8 соединяет ОПУ с любой внешней ПЭВМ, выбранной в качестве средства управления и индикации.
Изображенная на фиг. 2 РЛС «Сова» отображает расположение на корпусе ППУ двух отсеков 9 с антеннами из состава навигационной аппаратуры.
Конструктивно станция состоит из четырех функционально законченных частей: ППУ, ОПУ, треноги и сетевого блока питания. ОПУ с установленным ППУ закреплено на треноге. Опционно РЛС «Сова» может быть размещена без треноги на зданиях, вышках, опорах и т.п. посредством универсального кронштейна из состава дополнительного оборудования.
Описание и работа составных частей станции
1. Устройство приемопередающее
Устройство приемопередающее (ППУ) является основной составной частью РЛС «Сова». Конструктивно ППУ представляет собой герметичный корпус из высокопрочного алюминиевого сплава, передней стенкой которого является антенный блок, защищенный от внешних воздействий радиопрозрачным полотном 11. Электрические связи осуществляются через герметичный разъем. Разъем расположен на нижней стенке корпуса ППУ. Форма корпуса в виде пирамидальной призмы обеспечивает высокую механическую прочность и возможность применения высокоточных методов механической обработки при изготовлении. На углах корпуса установлены упоры 12, защищающие антенный блок от механических повреждений. На противоположных сторонах верхней части корпуса выполнены два симметричных отсека 9 под размещение антенн навигационной аппаратуры. Сверху отсеки закрыты герметичными радиопрозрачными крышками. Для обеспечения удобства сборки ППУ на задней стенке корпуса закреплена крышка 10. Крышка имеет механическую рельефную проработку наружной поверхности в виде логотипа «летучая мышь».
2. Опорно-поворотное устройство
ОПУ позволяет размещать полезную нагрузку, например, ППУ, массой до 20 кг с возможностью поворота в горизонтальной плоскости без ограничения, в вертикальной плоскости - от плюс 45 до минус 90 градусов; при этом масса ОПУ не превышает 7,7 кг. ОПУ может быть применено как в стандартном исполнении при рабочих температурах эксплуатации от минус 35 до плюс 50°C, так и в «северном» - при рабочих температурах эксплуатации от минус 50 до плюс 50°C. При рабочей температуре ниже минус 10°C ОПУ автоматически переходит в режим предварительного прогрева. Потребляемая мощность ОПУ не более 65 Вт.
3. Тренога
Тренога 3 содержит алюминиевый штатив и узел ориентирования и горизонтирования 4. Выдвижные секции штатива зафиксированы зажимными винтами 16. К винтам опционно может крепиться стяжка 17 для фиксации опор штатива в определенном угловом положении. Штатив укомплектован ремнем для переноски (не показан).
Узел ориентирования и горизонтирования установлен на плоской площадке штатива и надежно закрепляется, без использования крепежных изделий, посредством рукоятки 18. Рукоятка имеет глубокую рельефную насечку, которая облегчает работу в зимних условиях. Верхняя часть узла снабжена пузырьковым уровнем 19 для контроля горизонтального положения ППУ и невыпадающим винтовым зажимом 20 крепления ОПУ в любом положении относительно горизонтальной плоскости. Уровень закреплен на кронштейне, защищающем от механических повреждений. Узел 4 позволяет быстро и надежно выполнять сборку-разборку РЛС. Для перевода ППУ в горизонтальное положение, с контролем по пузырьковому уровню, в корпусе узла установлен винтовой зажим с «ломающейся» рукояткой 21. Конструкция рукоятки надежно фиксирует горизонтальное положение ППУ.
Детали узла выполнены из высококачественных материалов: нержавеющей стали и коррозионностойких алюминиевых сплавов.
4. Сетевой блок питания
Сетевой блок питания 6 представляет собой герметичный корпус с крышкой для доступа к внутреннему монтажу.
На торцевых поверхностях корпуса установлены гермовводы с выходящими через них кабелями. Кабели заканчиваются: с одной стороны, в качестве сетевой вилки электропитания, устройством 14 электрозащитного и противопожарного отключения АСТРО УЗОФ-1271, с другой - разъемом типа СНЦ 144, смонтированном на кабеле 7.
Кабель управления 8 выполнен в двух вариантах: длиной 15 м (для работы РЛС в переносном варианте) и длиной 100 м (для работы РЛС в стационарном варианте). Кабель заканчивается герметичными разъемами: типа СНЦ - для соединения с ОПУ, типа RJ-45 со средством управления и индикации.
Структурная схема РЛС «Сова» (фиг. 3)
Блок приемопередающий обеспечивает непрерывную генерацию зондирующего СВЧ сигнала на одной из четырех рабочих частот (литер) с одной из трех девиаций модулирующего ЛЧМ-сигнала. Номер литерной частоты и девиация ЛЧМ-сигнала задается подачей соответствующего кода с вычислительного устройства (ВУ).
В блоке приемопередающем с помощью цифрового синтезатора на низкой частоте формируется непрерывный ЛЧМ-сигнал заданной девиации, который затем переносится на более высокую частоту с учетом номера литеры. Далее сигнал фильтруется, переносится на несущие частоты 13.4-13.6 ГГц, усиливается в выходных каскадах СВЧ усилителей, подается в волноводно-щелевую передающую антенну и излучается в пространство.
Отраженные сигналы принимаются приемной частью антенны, усиливаются в малошумящем СВЧ усилителе и поступают на сигнальный вход квадратурного смесителя. На опорный вход квадратурногосмесителя подается сигнал с ответвителя передающего тракта. В смесителе спектр принятого сигнала преобразуется в область видеочастот. С выходов смесителя сигнал усиливается, фильтруется и поступает на вход быстродействующих АЦП.
С выхода АЦП оцифрованный сигнал в виде данных поступает в блок первичной обработки информации (ПОИ). Передача данных тактируется сигналом Бтакт. В блоке ПОИ осуществляется внутрипериодная обработка за период повторения ЛЧМ сигнала (273 мкс). Далее обработанный сигнал поступает на процессор сигналов блока ПОИ, где осуществляется его межпериодная обработка за 512 периодов повторения ЛЧМ сигнала (140 мс) и обнаружение целей в 512 каналах дальности.
Блок ПОИ в соответствии с протоколом обмена по последовательному интерфейсу RS-422 транслирует информацию обнаружителя в вычислительное устройство (ВУ). Также процессор блока ПОИ передает в ВУ информацию о величине аналоговых сигналов функционального контроля (напряжение питания РЛС и напряжение СВЧ, поступающее от датчика мощности), а также принимает данные по режимам работы РЛС. ВУ обеспечивает вторичную обработку информации и формирует пакет данных для обмена со средством управления и индикации (СУиИ) по интерфейсу Ethernet с учетом информации об азимутальном и угломестном текущем положении опорно-поворотного устройства. Информационный обмен между ВУ и ОПУ осуществляется по интерфейсу RS-485.
Для обеспечения распознавания типа цели (человек-техника) на слух, блок первичной обработки информации содержит дополнительный информационный выход, а вычислительное устройство дополнительно содержитинформационный вход, образующие звуковой канал. В соответствии с принятым от ВУ номером канала дальность блок ПОИ выдает в аналоговом виде звуковой сигнал на АЦП ВУ, который после преобразования в цифровом виде по Ethernet интерфейсу ретранслируется на СУиИ. На штатных средствах звукового вывода СУиИ воспроизводится доплеровский сигнал выбранного канала дальности.
В качестве СУиИ может использоваться любая внешняя ПЭВМ с предварительно установленным специальным программным обеспечением из состава комплекта поставки РЛС «Сова». ПЭВМ, имеющая в своем составе приемопередатчик Wi-Fi, позволит обеспечить беспроводной обмен данными с РЛС за счет подключения к приемопередающему устройству USB/Wi-Fi модуля.
Приемопередающее устройство РЛС «Сова» комплектуется модулем приемника GPS/ГЛОНАСС с двумя антеннами, предназначенного для определения координат места установки и азимутального положения приемопередающего устройства. Данные от модуля поступают в ВУ по интерфейсу USB и используются ВУ для вторичной обработки информации.
В РЛС «Сова» предусмотрена возможность установки на приемопередающее устройство малогабаритного ОЭП, электропитание которого осуществляется от блока вторичного источника питания (ВИЛ). Для использования аналогового ОЭП в приемопередающее устройство устанавливается дополнительный модуль видеозахвата. Он осуществляет оцифровку и обработку аналогового видеосигнала с ОЭП и его передачу на ВУ. Потоковое видео ретранслируется ВУ по интерфейсу Ethernet на СУиИ. В случае использования цифрового ОЭП (например, IP камеры) взаимодействие ОЭП с ВУ осуществляется по дополнительному Ethernet интерфейсу.
ОПУ обеспечивает сканирование приемопередающего устройства по азимуту и углу места. Управление параметрами сканирования осуществляется процессором из состава самого устройства, использующего для этого команды, поступающие от ВУ. ОПУ обеспечивает через токосъемник передачу напряжения питания для приемопередающего устройства и ретрансляцию сигналов на СУиИ или по выбору Заказчика на технические средства его локальной сети (в варианте построения охранной системы по сетевому принципу с использованием РЛС).
Электропитание РЛС осуществляется от сети переменного тока напряжением 220 В, 50 Гц через сетевой блок питания (СБП). СБП фильтрует и преобразует первичное напряжение в постоянное напряжение номиналом 24 В. В РЛС предусмотрена возможность работы от штатной герметичной литий-ионной аккумуляторной батареи (АКБ) номинальным напряжением 24 В. При подаче электропитания блок ВИЛ формирует все необходимые вторичные напряжения, а частота преобразования вторичных источников синхронизируется от приемопередающего блока.
Применениев заявленном устройстве разнесенных волноводно-щелевых приемнойи передающей антенн, имеющих, по сравнению с прототипом, больший коэффициент усиления, с также, использование непрерывного ЛЧМ сигнала, обладает преимуществами, обусловленными его первичной обработкой - сжатием и накоплением, что в конечном итоге выражается в необходимом превышении сигнала от цели над шумом, для его устойчивого обнаружения на максимальной дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА | 2023 |
|
RU2817396C1 |
| ПЕРЕНОСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ РАЗВЕДКИ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ЦИФРОВОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2023 |
|
RU2832238C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РЛС ДЕЦИМЕТРОВОГО ДИАПАЗОНА | 2008 |
|
RU2394253C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2223459C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ПОСЛЕДОВАТЕЛЬНОГО ОБЗОРА ПО ДАЛЬНОСТИ С ПЕРЕСТРОЙКОЙ ПО ЛИНЕЙНОМУ ЗАКОНУ ДЛИТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ФАЗОМАНИПУЛИРОВАННЫХ РАДИОИМПУЛЬСОВ | 2009 |
|
RU2405170C1 |


Изобретение относится к области радиолокации, в частности к радиолокационным средствам автоматического обнаружения, распознавания и сопровождения различных типов подвижных объектов. Достигаемый технический результат - обеспечение возможности автоматического обнаружения и сопровождения не только движущихся наземных и надводных целей, но и воздушных, автоматического распознавания типа цели (техника-человек). Указанный результат достигается за счет того, что радиолокационная станция содержит приемопередающее устройство, двухкоординатное опорно-поворотное устройство, выполненное с возможностью крепления на треноге, сетевой блок питания, при этом приемопередающее устройство выполнено в едином корпусе и содержит волноводно-щелевые приемную и передающую антенны, приемопередающий блок, обеспечивающий непрерывную генерацию зондирующего сигнала с линейной частотной модуляцией (ЛЧМ), блок первичной обработки информации, вычислительное устройство, вторичный источник питания, а также содержит с возможностью демонтажа приемник GPS/ГЛОНАСС, антенну приемника GPS/ГЛОНАСС. При этом блок первичной обработки информации содержит дополнительный информационный выход, а вычислительное устройство дополнительно содержит информационный вход, образующие звуковой канал, вычислительное устройство выполнено на одноплатной ЭВМ, опорно-поворотное устройство соединено с приемопередающим устройством с помощью кабеля и выполнено с возможностью автоматического сканирования приемопередающего устройства по азимуту и углу места, а также перехода в режим предварительного подогрева при рабочей температуре ниже минус 10°C. 6 з.п.ф-лы, 3 ил.
1. Радиолокационная станция охраны объектов, содержащая приемопередающее устройство, двухкоординатное опорно-поворотное устройство, выполненное с возможностью крепления на треноге, сетевой блок питания, отличающийся тем, что приемопередающее устройство выполнено в едином корпусе и содержит волноводно-щелевые приемную и передающую антенны, приемопередающий блок, обеспечивающий непрерывную генерацию зондирующего сигнала с линейной частотной модуляцией (ЛЧМ), блок первичной обработки информации, вычислительное устройство, вторичный источник питания, а также дополнительно содержит с возможностью демонтажа приемник GPS/ГЛОНАСС, антенну приемника GPS/ГЛОНАСС, малогабаритный оптико-электронный прибор и модуль видеозахвата, выполненный с возможностью приема аналогового сигнала от малогабаритного оптико-электронного прибора, оцифровки, обработки аналогового видеосигнала и его передачи на вычислительное устройство, при этом блок первичной обработки информации содержит дополнительный информационный выход, а вычислительное устройство дополнительно содержит информационный вход, образующие звуковой канал, вычислительное устройство выполнено на одноплатной ЭВМ и обеспечивает возможность выполнения функций управления, вторичной обработки радиолокационных и оптических данных, формирования пакета данных об обнаруженных целях на дальностях до 20 км и последующего обмена данными со средством управления и индикации по проводному интерфейсу Ethernet, сетевому протоколу TCP/IP или беспроводному каналу Wi-Fi, опорно-поворотное устройство соединено с приемопередающим устройством с помощью кабеля и выполнено с возможностью автоматического сканирования приемопередающего устройства по азимуту и углу места, а также перехода в режим предварительного подогрева при рабочей температуре ниже минус 10°C, сетевой блок питания соединен кабелем с опорно-поворотным устройством, кабель управления соединяет опорно-поворотное устройство со средством управления и индикации.
2. Радиолокационная станция по п. 1, отличающаяся тем, что корпус приемопередающего устройства выполнен герметичным из высокопрочного алюминиевого сплава, передней стенкой которого является антенный блок, защищенный от внешних воздействий радиопрозрачным полотном.
3. Радиолокационная станция по п. 2, отличающаяся тем, что на углах корпуса установлены упоры, на противоположных сторонах верхней части корпуса выполнены два симметричных отсека под размещение антенн навигационной аппаратуры, сверху отсеки закрыты герметичными радиопрозрачными крышками.
4. Радиолокационная станция по п. 1, отличающаяся тем, что дополнительно содержит треногу для установки на нее двухкоординатного опорно-поворотного устройства, где тренога содержит алюминиевый штатив и узел ориентирования и горизонтирования.
5. Радиолокационная станция по п. 4, отличающаяся тем, что узел ориентирования и горизонтирования установлен на плоской площадке штатива с возможностью крепления посредством рукоятки.
6. Радиолокационная станция по п. 5, отличающаяся тем, что верхняя часть узла снабжена пузырьковым уровнем для контроля горизонтального положения приемопередающего устройства.
7. Радиолокационная станция по п. 1, отличающаяся тем, что кабель выполнен в герметичном корпусе с крышкой для доступа к внутреннему монтажу.
| Стробоскопическое устройство | 1949 |
|
SU88815A1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТОВ | 1997 |
|
RU2126543C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| JP 2008197034 A, 28.08.2008 | |||
| JP 4716844 B2, 06.07.2011 | |||
| US 5719582 A, 17.02.1998 | |||
| Отражатель светильника | 1988 |
|
SU1610196A1 |

