Настоящее изобретение относится к области радиолокации, в частности к радиолокационно-оптическим устройствам автоматического обнаружения, распознавания, сопровождения и идентификации различных типов движущихся наземных, надводных и низколетящих объектов.
Мобильная радиолокационно-оптическая система (МРОС) предназначена для работы на открытом воздухе и может использоваться как средство радиолокационного кругового наблюдения за охраняемым сухопутным или водным участком местности (государственные границы, стратегические объекты, гидроэлектростанции, аэродромы и пр.) на дальностях до 20 км в любое время суток и времени года, с возможностью идентификации обнаруженных объектов при наведении оптико-электронного устройства. Дальность идентификации зависит от типа оптико-электронного устройства, погодных условий и не нормируется.
МРОС имеет возможность работать как автономно, так и встраиваться в состав систем охраны с сетевой архитектурой построения.
Известна переносная радиолокационная станция (РЛС) (см. [1] патент Российской Федерации на полезную модель №88815 «Переносная радиолокационная станция «Роса», МПК G01S 13/04, опубл. 20.11.2009), которая содержит антенный пост и связанное с антенным постом опорно-поворотное устройство, выполненное с возможностью закрепления на штативе. Антенный пост соединен кабельной сетью с блоком электропитания и рабочим местом оператора, представляющим собой геоинформационную систему, сопряженную с встроенной в станцию системой спутниковой навигации.
Переносная РЛС предназначена для слежения за наземными и/или надводными объектами с максимальной дальностью обнаружения объекта типа грузовой автомобиль до 13 км и не предусматривает сопряжение с оптико-электронными приборами и интеграцию станции в сетевые охранные системы.
Недостатками переносной РЛС является небольшая дальность обнаружения и ограниченные функциональные возможности.
Общеизвестно изобретение «Радиолокационная система охраны территорий с малокадровой системой видеонаблюдения и оптимальной численностью сил охраны» (см. [2] патент Российской Федерации на изобретение №2595532, МПК G01S 13/04, опубл. 27.08.2016), технические результаты которого заключаются в:
а) классификации подвижных объектов по критерию «свой-чужой»;
б) возможности пресечения действий нарушителя оптимальными силами охраны;
в) упрощении и удешевлении линии связи и повышении помехоустойчивости при передаче видеоинформации с параметрами распознавания нарушителя в малокадровом режиме.
Данная система предназначена только для стационарного исполнения средств обнаружения и не предусматривает интеграцию в сетевые охранные системы.
Наиболее близким по совокупности признаков к предлагаемой МРОС является изобретение «Радиолокационная станция охраны объектов «Сова» (РЛС «Сова») (см. [3] патент Российской Федерации на изобретение №2669383, МПК G01S 13/04, опубл. 11.10.2018), представляющая собой твердотельную когерентную доплеровскую радиолокационную станцию непрерывного излучения с ЛЧМ с возможностью аппаратно-программного комплексирования с оптико-электронными приборами.
В РЛС «Сова» предусмотрена возможность установки на приемопередающее устройство (ППУ) малогабаритного оптико-электронного прибора (ОЭП), электропитание которого осуществляется от блока вторичного источника питания ППУ. Для использования аналогового ОЭП в приемопередающее устройство устанавливается дополнительный модуль видеозахвата. Он осуществляет оцифровку и обработку аналогового видеосигнала с ОЭП и его передачу на вычислительное устройство. Потоковое видео ретранслируется вычислительным устройством по интерфейсу Ethernet на средство управления и индикации. В случае использования цифрового ОЭП (например, IP камеры) взаимодействие ОЭП с вычислительным устройством осуществляется по дополнительному Ethernet интерфейсу.
В РЛС «Сова» также предусмотрено аппаратно-программное комплексирование ППУ с ОЭП, однако оно имеет следующие недостатки:
- зависимость работы ОЭП от направления работы ППУ, следовательно, оператор РЛС имеет возможность получения видеоинформации только от сопровождаемого ППУ движущегося объекта;
- описанная схема электропитания ОЭП в составе РЛС «Сова» приводит к существенному снижению времени автономной работы станции от аккумуляторной батареи;
- увеличение массы полезной нагрузки на опорно-поворотное устройство РЛС «Сова» существенно ограничивает выбор типа монтируемого ОЭП;
- размещение ОЭП на приемопередающем устройстве делает систему менее эффективной в части выбора оптимальной позиции на местности исходя из рельефа местности, наличия растительности, строений и т.д.
Технический результат заявленного изобретения заключается в обеспечении возможности одновременной работы ППУ и ОЭП в разных направлениях, а также автоматического наведения ОЭП на обнаруженные движущиеся объекты, в том числе распознанные ППУ, для их идентификации, увеличении времени автономной работы МРОС от источников питания (например, аккумуляторных батарей) и возможности интегрирования в охранные системы с сетевой архитектурой.
Указанный результат обеспечивается за счет следующих особенностей работы составных частей МРОС.
ППУ и ОЭП размещаются на отдельных двухкоординатных опорно-поворотных устройствах с узлами ориентирования и горизонтирования, что обеспечивает возможность одновременной работы ППУ и ОЭП в разных направлениях.
Двухкоординатное опорно-поворотное устройство ППУ обеспечивает сканирование ППУ по азимуту и углу места.
Двухкоординатное опорно-поворотное устройство ОЭП обеспечивает возможность автоматического наведения ОЭП на координаты движущихся объектов, в том числе на координаты объектов, обнаруженных ППУ.
Узлы ориентирования и горизонтирования позволяют разместить ППУ и ОЭП на треногах, а также посредством универсальных кронштейнов на зданиях, вышках или других опорах.
ППУ и ОЭП имеют собственные источники питания, например, аккумуляторные батареи, а также возможность подключения к сети переменного тока через сетевые блоки питания (СБП).
Управление МРОС осуществляется одним или двумя средствами управления и отображения радиолокационной и видеоинформации через коммутатор интерфейса Ethernet, использующий стандартизированный протокол TCP/IP, который с помощью кабелей данных обеспечивает сетевое распределение и передачу данных.
Применение стандартизированного протокола информационно-аппаратного взаимодействия также обеспечивает возможность интегрирования МРОС в охранные системы с сетевой архитектурой. Для передачи данных на пульт управления охранной системы в коммутаторе интерфейса Ethernet МРОС предусмотрен разъем RJ-45 для подключения к общей сети охраняемого объекта, откуда осуществляется управление ППУ и ОЭП, а также обработка разведывательных данных, при этом ППУ и ОЭП, с помощью треног и универсальных кронштейнов, могут размещаться независимо друг от друга на зданиях, вышках, опорах и т.п. с возможностью передислокации.
Описание конструкции МРОС поясняется графическими изображениями, где:
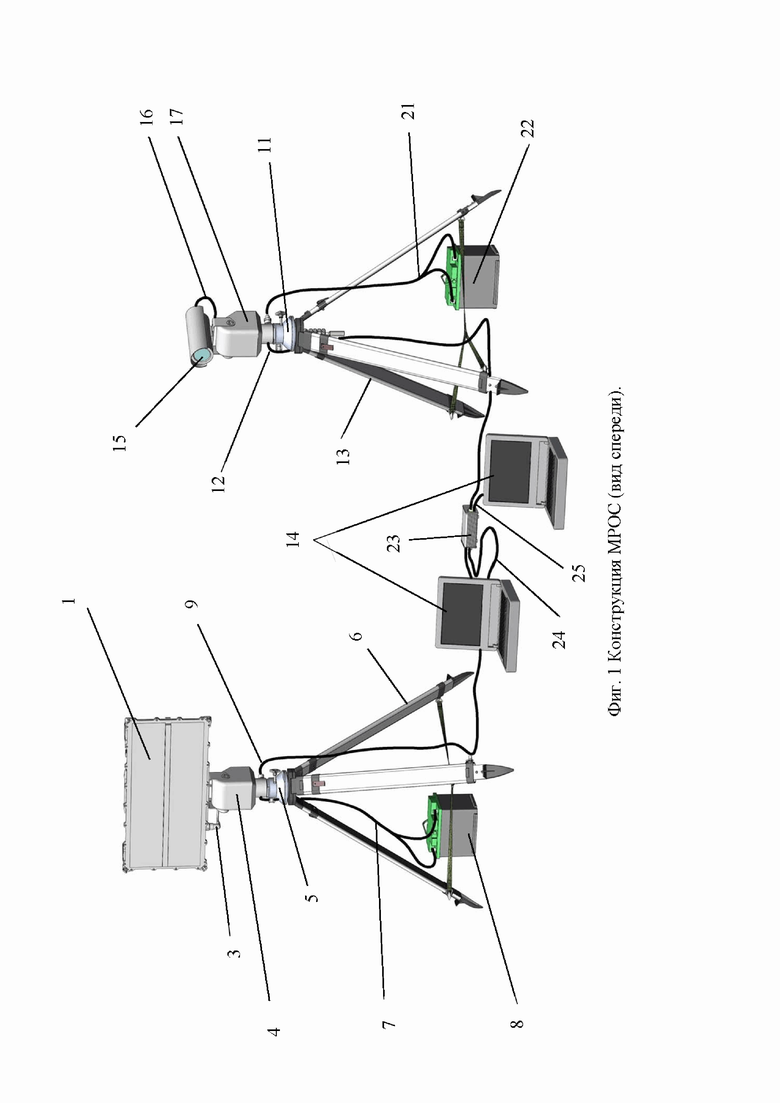
- на фиг. 1 изображена МРОС в рабочем положении (вид спереди);
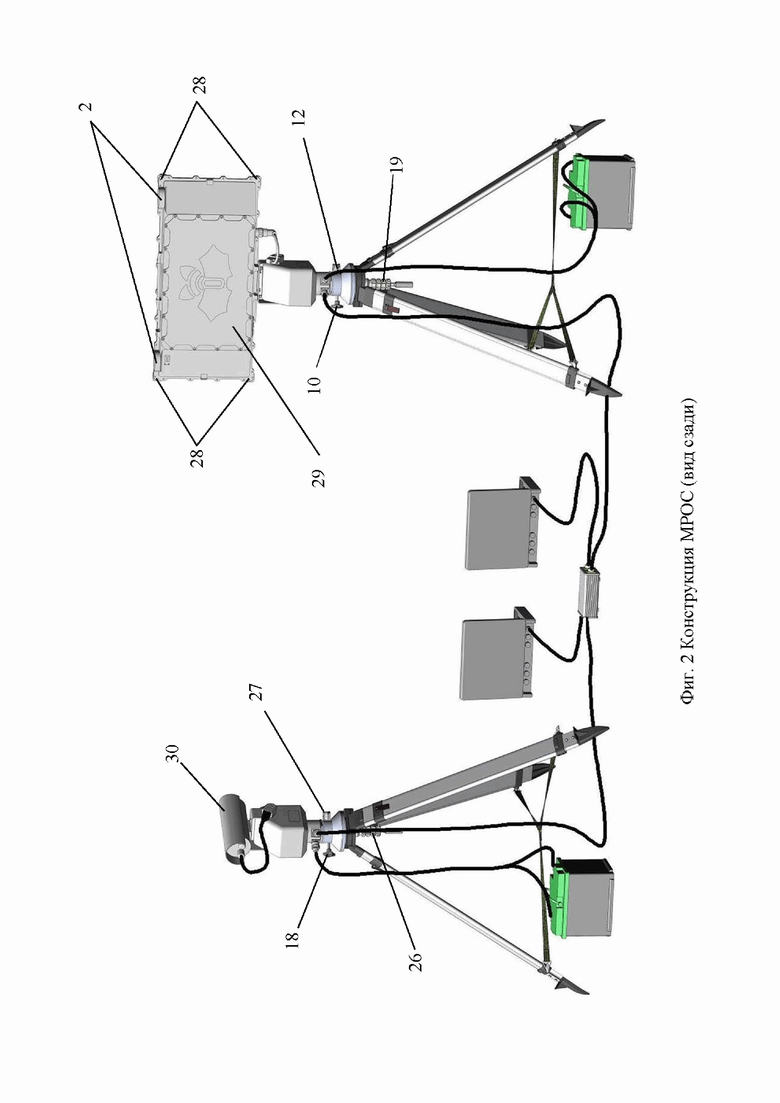
- на фиг. 2 изображена МРОС в рабочем положении (вид сзади);
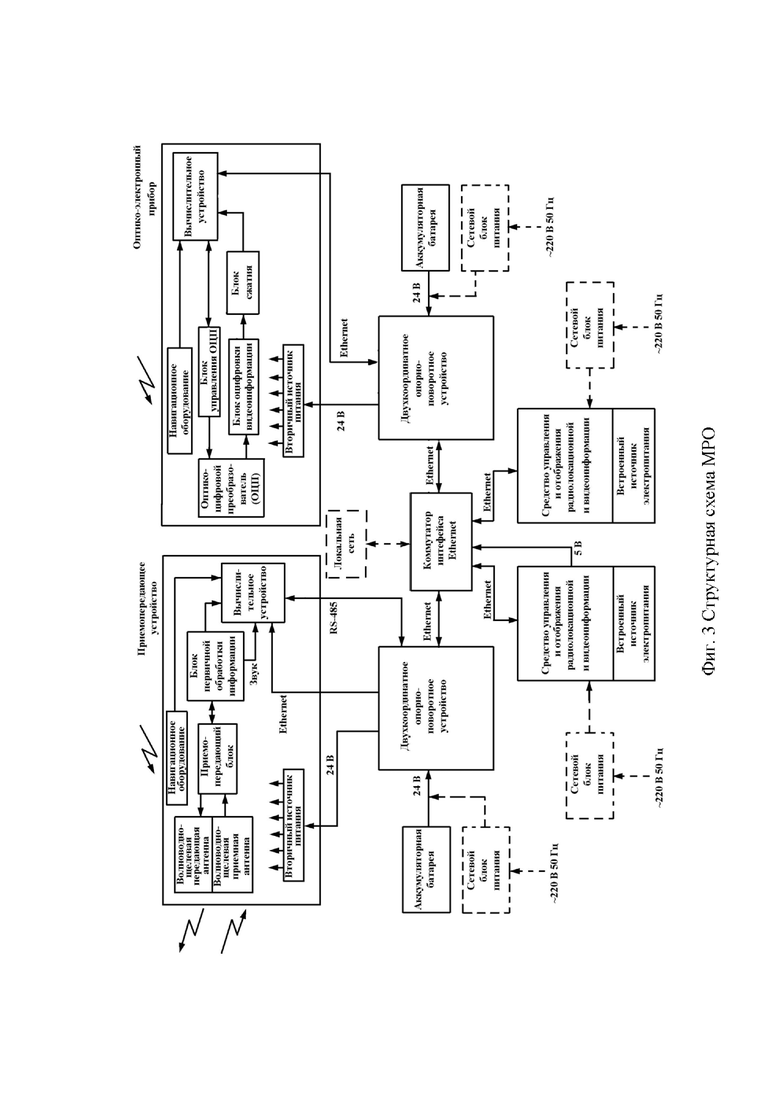
- на фиг. 3 представлена структурная схема МРОС.
Изображенная на фиг. 1 и фиг. 2 МРОС состоит из ППУ 1 и ОЭП 15, установленных на двухкоординатных опорно-поворотных устройствах (ДОПУ) 4 и 17, закрепленных на треногах 6 и 13 посредством узлов ориентирования и горизонтирования 5 и 11. Электрическое соединение между ППУ 1 и ДОПУ 4 выполнено кабелем 3, между ОЭП 15 и ДОПУ 17 выполнено кабелем 16. Источники питания в виде аккумуляторных батарей 8 и 22 соединены кабелями 7 и 21 с одним из разъемов ДОПУ 4 и 17, кабели данных 9 и 12 соединяют ДОПУ 4 и 17 с коммутатором интерфейса Ethernet 23. Посредством кабелей 24 и 25 радиолокационная и видеоинформация передается от коммутатора интерфейса Ethernet 23 на средства управления и отображения радиолокационной и видеоинформации 14.
Две антенны из состава навигационного оборудования ППУ 1 расположены на его корпусе в отсеках 2, а в ОЭП 15 навигационное оборудование встроено в корпус.
Описание и работа составных частей МРОС
1. ППУ 1 представляет собой герметичный корпус, в котором содержатся волноводно-щелевые приемная и передающая антенны, приемопередающий блок, обеспечивающий непрерывную генерацию зондирующего сигнала с линейной частотной модуляцией (ЛЧМ), блок первичной обработки информации, вычислительное устройство, вторичный источник питания, а также дополнительно содержит навигационное оборудование (модуль приемника GPS/ГЛОНАСС с двумя антеннами), при этом блок первичной обработки информации приемопередающего устройства содержит дополнительный информационный выход, а вычислительное устройство дополнительно содержит информационный вход, образующие звуковой канал.
На углах корпуса ППУ 1 установлены упоры 28, защищающие антенный блок от механических повреждений. На противоположных сторонах верхней части корпуса выполнены два симметричных отсека 2 под размещение антенн навигационной аппаратуры. Сверху отсеки закрыты герметичными радиопрозрачными крышками.
Для обеспечения удобства сборки ППУ 1 на задней стенке корпуса закреплена крышка 29. Крышка имеет механическую рельефную проработку наружной поверхности в виде логотипа «летучая мышь».
2. В качестве ОЭП 15 может быть использована телевизионная, тепловизионная или комбинированная камера.
ОЭП 15 представляет собой герметичный корпус, в котором размещены: оптико-цифровой преобразователь, блок управления оптико-цифровым преобразователем, навигационное оборудование (модуль приемника GPS/ГЛОНАСС с антенной и электронным компасом), блок оцифровки видеоинформации, блок сжатия, вычислительное устройство, вторичный источник питания. Сверху отсек закрыт герметичной радиопрозрачной крышкой 30.
3. ДОПУ 4 и 17 позволяют размещать полезную нагрузку массой до 20 кг с возможностью поворота в горизонтальной плоскости без ограничения, в вертикальной плоскости - от плюс 45 до минус 90 градусов; при этом масса ОПУ не превышает 7,7 кг. ДОПУ 4 и 17 могут быть применены как в стандартном исполнении при рабочих температурах эксплуатации от минус 35 до плюс 50°C, так и в «северном» - при рабочих температурах эксплуатации от минус 50 до плюс 50°C. При рабочей температуре ниже минус 10°C ДОПУ 4 и 17 автоматически переходят в режим предварительного прогрева. Потребляемая мощность ДОПУ 4 и 17 не более 65 Вт.
4. Треноги 6 и 13 содержат алюминиевый штатив. Выдвижные секции штатива зафиксированы зажимными винтами. Штатив укомплектован ремнем для переноски (не показан).
5. Узлы ориентирования и горизонтирования 5 и 11 установлены на плоских площадках треног 6 и 13 и надежно закрепляются без использования крепежных изделий посредством рукояток 19 и 26. Рукоятки 19 и 26 имеют глубокую рельефную насечку, которая облегчает работу в зимних условиях. Верхняя часть узла снабжена пузырьковыми уровнями 12 и 27 для контроля горизонтального положения ППУ 1 и ОЭП 15 и невыпадающими винтовыми зажимами 10 и 18 крепления ДОПУ 4 и 17 в любом положении относительно горизонтальной плоскости. Узлы ориентирования и горизонтирования 5 и 11 позволяют быстро и надежно выполнять сборку-разборку МРОС.
Детали узлов ориентирования и горизонтирования 5 и 11 выполнены из высококачественных материалов: нержавеющей стали и коррозионностойких алюминиевых сплавов.
6. Электропитание ППУ 1 и ОЭП 15 осуществляется от аккумуляторных батарей 8 и 22 посредством кабелей 7 и 21.
Время работы МРОС при электропитании от аккумуляторных батарей в нормальных климатических условиях составляет не менее 6 часов.
Опционально МРОС может быть укомплектована сетевыми блоками электропитания для ППУ 1 и ОЭП 15 от промышленной сети (не показаны) общей сети охраняемого объекта.
7. Кабели данных 9 и 12 для работы ППУ 1 и ОЭП 15 заканчиваются герметичными разъемами: типа СНЦ - для соединения с ДОПУ 4 и 17, типа RJ-45 с коммутатором интерфейса Ethernet 23.
8. Коммутатор интерфейса Ethernet 23 обеспечивает передачу информации по протоколу TCP/IP проводной сети Ethernet между ППУ 1, ОЭП 15 и средствами управления и отображения радиолокационной и видеоинформации 14 и представляет собой герметичный корпус с крышкой для доступа к внутреннему монтажу. Для передачи данных на пульт управления охранной системы в коммутаторе интерфейса Ethernet МРОС предусмотрен разъем RJ-45 для подключения к общей сети охраняемого объекта.
Структурная схема МРОС представлена на фиг. 3.
ППУ обеспечивает непрерывную генерацию и передачу через волноводно-щелевую передающую антенну зондирующего СВЧ сигнала на одной из четырех рабочих частот (литер). Отраженные сигналы принимаются волноводно-щелевой приемной антенной, усиливаются и обрабатываются приемопередающим блоком, блоком первичной обработки информации и вычислительным устройством. Затем по интерфейсу Ethernet, транзитом через ДОПУ ППУ поступают в коммутатор интерфейса Ethernet. Коммутатор интерфейса Ethernet по протоколу TCP/IP передает данные на средство управления и отображение радиолокационной информации или в общую сеть охраняемого объекта.
Для обеспечения распознавания типа объекта (человек-техника) на слух, блок первичной обработки информации ППУ содержит дополнительный информационный выход, через который выдается в аналоговом виде звуковой сигнал на информационный вход вычислительного устройства ППУ, который после преобразования в цифровом виде по Ethernet интерфейсу ретранслируется на средство управления и отображение радиолокационной информации или в общую сеть охраняемого объекта.
ППУ формирует пакет данных об азимутальном и угломестном текущем положении ДОПУ по интерфейсу RS-485.
ППУ комплектуется навигационным оборудованием (модулем приемника GPS/ГЛОНАСС с двумя антеннами), предназначенным для определения координат места установки и азимутального положения ППУ. Данные от модуля приемника GPS/ГЛОНАСС обрабатываются вычислительным устройством ППУ и поступают в пакете данных на средство управления и отображения радиолокационной и видеоинформации или в общую сеть охраняемого объекта по интерфейсу Ethernet.
ДОПУ ППУ обеспечивает сканирование ППУ по азимуту и углу места. Управление параметрами сканирования осуществляется процессором из состава самого ДОПУ ППУ, использующего для этого команды, поступающие от средства управления и отображения радиолокационной и видеоинформации или из общей сети охраняемого объекта. ДОПУ ППУ обеспечивает передачу напряжения питания для ППУ и ретрансляцию сигналов на средство управления и отображения радиолокационной и видеоинформации или в общую сеть охраняемого объекта.
Электропитание ППУ осуществляется через ДОПУ ППУ и вторичный источник питания от источника питания, например, аккумуляторной батареи номинальным напряжением 24 В. А также в ППУ предусмотрена работа от промышленной сети 220 В, 50 Гц общей сети охраняемого объекта через сетевой блок питания (СБП). СБП фильтрует и преобразует первичное напряжение в постоянное напряжение номиналом 24 В.
ОЭП предназначен для формирования и обработки потока видеоинформации.
ОЭП обеспечивает преобразование визуальной информации с оптико-цифрового преобразователя в пакет цифровых данных с помощью блока оцифровки видеоинформации, а посредством блока сжатия данные передаются на вычислительное устройство ОЭП.
ОЭП комплектуется навигационным оборудованием (модулем приемника GPS/ГЛОНАСС с антенной и электронным компасом), предназначенным для определения координат места установки и азимутального положения ОЭП. Данные от модуля приемника GPS/ГЛОНАСС обрабатываются вычислительным устройством и поступают в пакете данных на коммутатор Ethernet по протоколу TCP/IP.
ДОПУ ОЭП предназначено для наведения ОЭП в азимутальной и угломестной плоскости на объект для последующей его идентификации. В режиме самостоятельной работы ППУ и ОЭП в разных направлениях управление параметрами сканирования осуществляется процессором из состава самого ДОПУ ОЭП, использующего для этого команды, поступающие от средства управления и отображения радиолокационной и видеоинформации или общей сети охраняемого объекта. В режиме автоматического наведения ОЭП по азимуту и углу места на движущиеся объекты, обнаруженные ППУ, команды на процессор ДОПУ ОЭП поступают с вычислительного устройства ППУ.
ДОПУ ОЭП обеспечивает передачу напряжения питания для ОЭП и ретрансляцию видеоинформации на одно или два средства управления и отображения радиолокационной и видеоинформации или в общую сеть охраняемого объекта.
Электропитание ОЭП осуществляется через ДОПУ ОЭП и вторичный источник питания от источника питания, например, аккумуляторной батареи номинальным напряжением 24 В. А также в ОЭП предусмотрена работа от промышленной сети 220 В, 50 Гц общей сети охраняемого объекта через СБП. СБП фильтрует и преобразует первичное напряжение в постоянное напряжение номиналом 24 В.
В качестве средства управления и отображения радиолокационной и видеоинформации может использоваться любая внешняя ПЭВМ. В данном примере рассматриваются ПЭВМ типа ноутбук, которые могут работать от встроенных источников электропитания, а также от промышленной сети 220 В, 50 Гц через сетевой блок питания (СБП). СБП фильтрует и преобразует первичное напряжение в постоянное напряжение номиналом 24 В.
Коммутационное оборудование обеспечивает сетевое распределение и передачу данных между ППУ, ОЭП и средствами управления и отображения радиолокационной и видеоинформации и включает в себя коммутатор интерфейса Ethernet, кабели данных, соединяющих ДОПУ с коммутатором интерфейса Ethernet, а также кабели для передачи радиолокационной и видеоинформации от коммутатора интерфейса Ethernet на средства управления и отображения радиолокационной и видеоинформации или в общую сеть охраняемого объекта.
Электропитание коммутатора интерфейса Ethernet осуществляется с помощью кабеля от средства управления и отображения радиолокационной и видеоинформации. Также предусмотрена работа коммутатора интерфейса Ethernet от общей сети охраняемого объекта (локальная сеть).
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационная станция охраны объектов "Сова" | 2017 |
|
RU2669383C1 |
| ПЕРЕНОСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ РАЗВЕДКИ НАЗЕМНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ С ЦИФРОВОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2023 |
|
RU2832238C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2019 |
|
RU2742130C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| Комплекс технических средств автоматизации управления | 2016 |
|
RU2614927C1 |
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2013 |
|
RU2530185C1 |
| КОРАБЕЛЬНАЯ ИНТЕГРИРОВАННАЯ МОСТИКОВАЯ СИСТЕМА | 2010 |
|
RU2453909C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА АНАЛИЗА ВНЕШНЕЙ ОБСТАНОВКИ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ | 2019 |
|
RU2735559C1 |
Изобретение относится к области радиолокации, в частности радиолокационно-оптическим устройствам автоматического обнаружения, распознавания, сопровождения и идентификации различных типов движущихся наземных, надводных и низколетящих объектов. Техническим результатом изобретения является обеспечение возможности одновременной работы приемопередающего устройства и оптико-электронного прибора в разных направлениях, а также автоматического наведения оптико-электронного прибора на обнаруженные движущиеся объекты, в том числе распознанные приемопередающим устройством, для их идентификации, увеличения времени автономной работы мобильной радиолокационно-оптической системы от источников питания и возможности интегрирования в охранные системы с сетевой архитектурой. Мобильная радиолокационно-оптическая система содержит приемопередающее устройство и оптико-электронный прибор, размещенные на собственных двухкоординатных опорно-поворотных устройствах, установленных на узлах ориентирования и горизонтирования, выполненных с возможностью крепления на треногах или на зданиях, вышках, опорах посредством универсальных кронштейнов, источники питания, соединенные кабелями с приемопередающим устройством и оптико-электронным прибором, одно или два средства управления и отображения радиолокационной и видеоинформации со встроенными источниками электропитания, коммутатор интерфейса Ethernet, использующий протокол TCP/IP, который с помощью кабелей данных обеспечивает сетевое распределение и передачу данных. 6 з.п. ф-лы, 3 ил.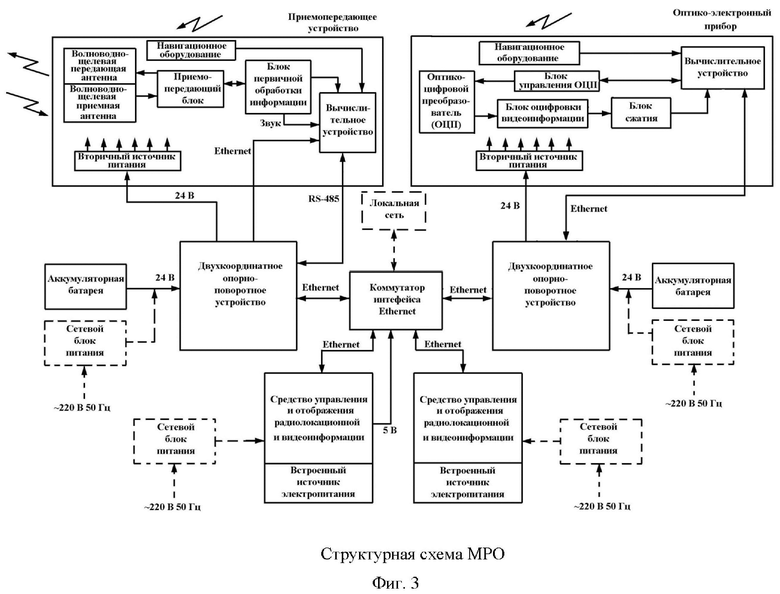
1. Мобильная радиолокационно-оптическая система, содержащая приемопередающее устройство и оптико-электронный прибор, размещенные на отдельных двухкоординатных опорно-поворотных устройствах, установленных на узлах ориентирования и горизонтирования, выполненных с возможностью крепления на треногах или на зданиях, вышках, опорах посредством универсальных кронштейнов, источники питания, соединенные кабелями с приемопередающим устройством и оптико-электронным прибором, одно или два средства управления и отображения радиолокационной и видеоинформации, коммутатор интерфейса Ethernet, использующий протокол TCP/IP, который с помощью кабелей данных обеспечивает сетевое распределение и передачу данных, причем
приемопередающее устройство, соединенное кабелем с двухкоординатным опорно-поворотным устройством, обеспечивающим возможность приемопередающего устройства автоматического сканирования по азимуту и углу места, выполнено в едином корпусе и содержит волноводно-щелевые приемную и передающую антенны, приемопередающий блок, обеспечивающий непрерывную генерацию зондирующего сигнала с линейной частотной модуляцией, блок первичной обработки информации, вычислительное устройство, вторичный источник питания, а также дополнительно содержит навигационное оборудование, при этом блок первичной обработки информации приемопередающего устройства содержит дополнительный информационный выход, а вычислительное устройство дополнительно содержит информационный вход, образующие звуковой канал;
оптико-электронный прибор, соединенный кабелем с двухкоординатным опорно-поворотным устройством, обеспечивающим возможность автоматического наведения оптико-электронного прибора по азимуту и углу места на обнаруженные приемопередающим устройством движущиеся объекты, выполнен в едином корпусе и содержит оптико-цифровой преобразователь, блок управления оптико-цифровым преобразователем, навигационное оборудование, блок оцифровки видеоинформации, блок сжатия, вычислительное устройство, вторичный источник питания, которые обеспечивают формирование пакета данных с видеоинформацией, координатами точки установки, углом азимутального положения оптико-электронного прибора, а также последующий обмен данными с приемопередающим устройством и одним или двумя средствами управления и отображения радиолокационной и видеоинформации.
2. Мобильная радиолокационно-оптическая система по п. 1, отличающаяся тем, что на углах корпуса приемопередающего устройства установлены упоры, а на противоположных сторонах верхней части корпуса приемопередающего устройства выполнены два симметричных отсека под размещение антенн навигационной аппаратуры, сверху отсеки закрыты герметичными радиопрозрачными крышками.
3. Мобильная радиолокационно-оптическая система по п. 1, отличающаяся тем, что может содержать два средства управления и отображения радиолокационной и видеоинформации, каждое из которых содержит встроенный источник электропитания и является независимым автоматизированным рабочим местом оператора.
4. Мобильная радиолокационно-оптическая система по п. 1, отличающаяся тем, что коммутатор интерфейса Ethernet осуществляет электропитание от средства управления и отображения радиолокационной и видеоинформации.
5. Мобильная радиолокационно-оптическая система по п. 1, отличающаяся тем, что узлы ориентирования и горизонтирования содержат рукоятки с глубокой рельефной насечкой для установки на треногах и невыпадающие винтовые зажимы для крепления двухкоординатных опорных устройств.
6. Мобильная радиолокационно-оптическая система по п. 1, отличающаяся тем, что навигационное оборудование приемо-передающего устройства представляет собой модуль приемника GPS/ГЛОНАСС с двумя антеннами.
7. Мобильная радиолокационно-оптическая система по п. 1, отличающаяся тем, что навигационное оборудование оптико-электронного прибора представляет собой модуль приемника GPS/ГЛОНАСС с антенной и электронным компасом.
| Радиолокационная станция охраны объектов "Сова" | 2017 |
|
RU2669383C1 |
| Стробоскопическое устройство | 1949 |
|
SU88815A1 |
| CN 106405540 A, 15.02.2017 | |||
| CN 115436937 A, 06.12.2022 | |||
| CN 108387908 A, 10.08.2018 | |||
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
