Изобретение относится к радиолокации и может быть использовано в интересах ПВО и УВД для обнаружения, измерения координат, опознавания, сопровождения и распознавания на дальностях до 400 км широкого класса аэродинамических и баллистических объектов.
Известны трехкоординатные РЛС большой дальности дециметрового диапазона, решающие аналогичные задачи. Это различные модификации РЛС AN/TPS-59 фирмы Lockheed Martin Corp. (США) и РЛС семейства Martello фирмы Alenia Marconi Systems (Великобритания) [1, 2].
Большинство этих РЛС, как правило, характеризуется низкой мобильностью (время их свертывания или развертывания составляет 4-5 часов), в то время как мобильность является одной из важных характеристик РЛС и определяющей в обеспечении ее живучести. Кроме того, все вышеуказанные аналоги имеют невысокие пределы работы по высоте и углу места - до 31 км и 20°, соответственно.
Наиболее близкой по технической сущности, назначению и основным техническим характеристикам является тактическая трехкоординатная мобильная РЛС кругового обзора большой дальности, работающая в дециметровом диапазоне, типа S 753 Martello (Великобритания) [3], принятая за прототип.
Эта РЛС состоит из фазированной антенной решетки (ФАР), опорно-поворотного устройства (ОПУ), контейнеров с передатчиком, аппаратурой госопознавания, обработки и управления, выполненной на базе специализированной ЭВМ, и источника первичного электропитания.
ФАР состоит из идентичных горизонтальных элементов, расположенных ярусами, каждый со своим твердотельным приемником, и диаграммообразующего устройства, формирующего косекансную диаграмму направленности на передачу. Над ФАР установлена отдельная антенна системы госопознавания.
ОПУ содержит основание для установки ФАР, редуктор, привод вращения и датчик угла поворота ФАР в горизонтальной плоскости.
РЛС - прототип может размещаться на неподготовленной позиции, имеет встроенное оборудование для подъема и перемещения грузов, перевозится крупными частями (контейнеры, фрагменты ФАР, антенна системы госопознавания, ОПУ) на любых стандартных дорожных трейлерах, загрузка и разгрузка которых осуществляется стандартной механической лебедкой.
Время свертывания РЛС - прототипа - 0,5 часа, время развертывания - 1 час.
Недостатком прототипа является низкая мобильность, что препятствует его использованию при необходимости более быстрой передислокации, а также снижает ее живучесть.
Низкая мобильность прототипа связана с его перевозкой в разобранном виде, что приводит к затратам дополнительного времени на разборку и сборку ФАР, погрузку и разгрузку перевозимых частей РЛС, их электрический демонтаж и последующий монтаж.
Другим недостатком прототипа, присущим и вышеуказанным аналогам, являются низкие пределы работы по высоте и углу места, что ограничивает его применение при работе по высоколетящим целям.
Техническим результатом предлагаемого изобретения является расширение функциональных возможностей РЛС за счет существенного повышения ее мобильности и расширения пределов работы по высоте и углу места.
Указанный технический результат достигается тем, что входящие в РЛС устройства размещены на едином транспортном средстве как при работе, так и при транспортировании. При этом дополнительно введены устройство ориентирования и топопривязки, устройство развертывания и свертывания и переключатель положения луча на передачу. Кроме того, в одной конструкции ФАР объединены локационная антенна и антенна системы госопознавания.
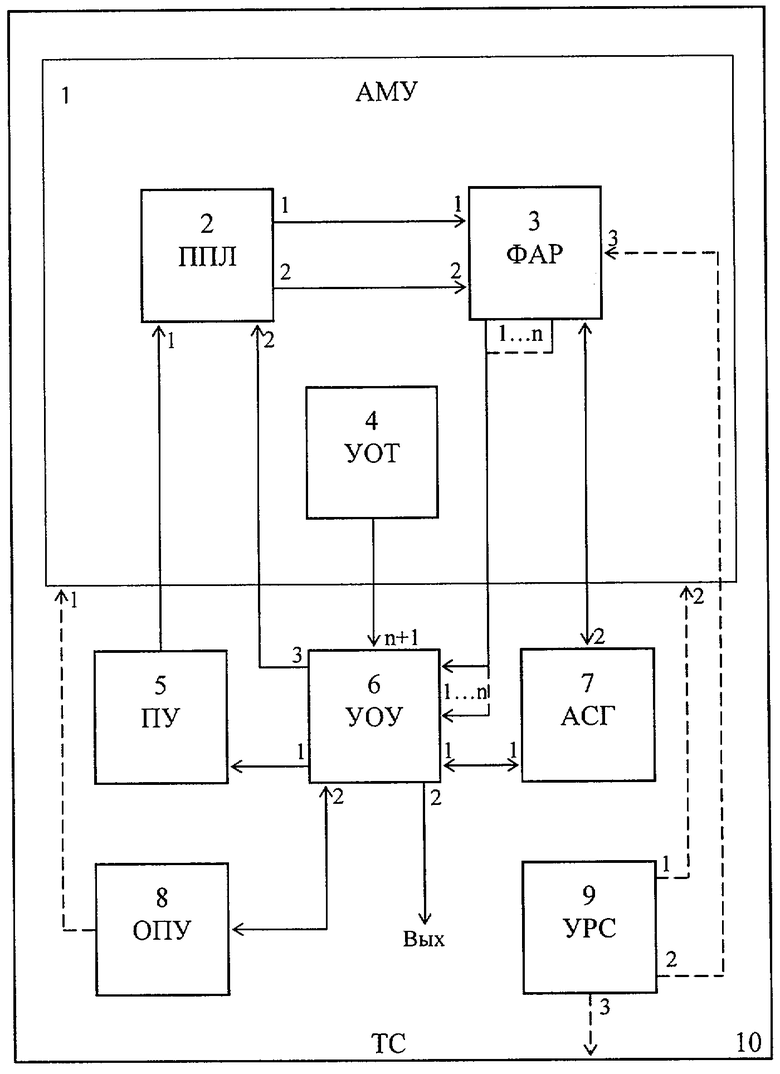
На чертеже представлена структурная схема предлагаемого устройства, где обозначены:
1 - антенно-мачтовое устройство (АМУ);
2 - переключатель положения луча на передачу (ППЛ);
3 - фазированная антенная решетка (ФАР);
4 - устройство ориентирования и топопривязки (УОТ);
5 - передающее устройство (ПУ);
6 - устройство обработки и управления (УОУ);
7 - аппаратура системы госопознавания (АСГ);
8 - опорно-поворотное устройство (ОПУ);
9 - устройство развертывания и свертывания (УРС);
10 - транспортное средство (ТС).
РЛС содержит антенно-мачтовое устройство (АМУ) 1, в которое входят переключатель положения луча на передачу (ППЛ) 2, фазированная антенная решетка (ФАР) 3 и устройство ориентирования и топопривязки (УОТ) 4. В РЛС также входит передающее устройство (ПУ) 5, устройство обработки и управления (УОУ) 6, аппаратура системы госопознавания (АСГ) 7, опорно-поворотное устройство (ОПУ) 8, устройство развертывания и свертывания (УРС) 9, транспортное средство (ТС) 10, на котором размещены все перечисленные устройства, и источник первичного электропитания (не показан). Источник первичного электропитания, как и в прототипе, может располагаться на другом транспортном средстве.
ПУ 5 своим выходом соединено с первым входом ППЛ 2, первый и второй выходы которого соединены с первым и вторым входами ФАР 3, вход-выход которой через АСГ 7 соединен с первым входом-выходом УОУ 6, n входов которого соединены с n выходами ФАР 3, (n+1) - и вход - с выходом УОТ 4, первый выход - с входом ПУ 5, третий - со вторым входом ППЛ 2, а второй выход является выходом РЛС, второй вход-выход УОУ 6 соединен с ОПУ 8, выход которого механически соединен с первым входом АМУ 1, второй вход которого, так же как и третий вход ФАР 3 и вход ТС 10, механически соединены с первым, вторым и третьим выходами УРС 9, соответственно.
Конструктивно АМУ 1 выполнено в виде силового ствола, на котором закреплена ФАР 3, и размещено на платформе ТС 10.
ППЛ 2 представляет собой двухпозиционный переключатель СВЧ-энергии с управляемым электроприводом (Патент РФ №46886 «Исполнительное устройство двухпозиционного привода волноводного переключателя») и размещен в силовом стволе АМУ 1.
ФАР 3 состоит из трех вертикальных панелей с n горизонтальными приемопередающими линейками полуволновых вибраторов локационной антенны и линейками антенны системы госопознавания. Центральная панель ФАР 3, шарнирно связанная с двумя боковыми панелями, жестко закреплена на силовом стволе (Патент РФ №2276821, «Мобильная антенная установка»).
В состав ФАР 3 входят также диаграммообразующее устройство на передачу, которое содержит делители мощности, фазовращатели и циркуляторы (по количеству приемопередающих линеек локационной антенны ФАР 3) и размещено в силовом стволе АМУ 1, и n приемных модулей в количестве приемопередающих линеек локационной антенны ФАР 3, размещенных также в силовом стволе АМУ 1.
Каждый приемный модуль содержит диодный ограничитель, фильтр, смеситель, малошумящий усилитель, аналого-цифровой преобразователь и маломощный источник вторичного электропитания.
УОТ 4 состоит из блока обработки и антенны и осуществляет автоматическое ориентирование и топопривязку РЛС с использованием систем ГЛОНАСС и GPS. Блок обработки размещен в силовом стволе АМУ 1, а антенна закреплена на верхней кромке ФАР 3.
ПУ 5 может быть выполнено на базе импульсного электровакуумного или твердотельного монопередатчика.
УОУ 6, так же как и в прототипе, выполнено на базе специализированной ЭВМ с необходимым программным обеспечением, позволяющим осуществлять пространственно-временную обработку сигналов [4, стр.21-130], обнаружение и измерение координат [4, стр.131-182], сопровождение [4, стр.183-330] и распознавание типов [4, стр.331-370] летательных аппаратов, управление работой РЛС [4, стр.371-405] и ее устройств (ППЛ2, ПУ5, АСГ7, ОПУ8), а также выдачу необходимой информации потребителю.
АСГ 7 представляет собой часть стандартной системы госопознавания "запрос - ответ" и связана с антенной системы госопознавания, расположенной в ФАР 3.
ОПУ 8, так же как и в прототипе, содержит основание для установки АМУ 1, привод вращения, редуктор и датчик угла поворота ФАР 3 в горизонтальной плоскости.
УРС 9 - автоматическая система гидравлических механизмов подъема и опускания АМУ 1, раскладывания и складывания боковых панелей ФАР 3, а также горизонтирования платформы ТС 10, которое содержит гидравлические опоры (не показаны).
Элементы ПУ5, УОУ6, АСГ7, ОПУ 8 и УРС 9 размещены как на платформе ТС 10, так и на АМУ 1.
Электрические соединения между аппаратурой, размещенной на платформе ТС10 и АМУ 1, осуществляются через вращающийся токосъемник (не показан).
РЛС, так же как и ее прототип, может размещаться на неподготовленной позиции. В транспортном положении АМУ 1 опущено центральной панелью ФАР 3 на платформу ТС 10, а боковые панели сложены и прижаты к силовому стволу.
РЛС работает следующим образом.
Вначале при помощи УРС 9 производят развертывание РЛС: подъем АМУ 1, раскладывание боковых панелей ФАР 3 и горизонтирование платформы ТС 10. Затем, вращая АМУ 1 с ФАР 3 посредством ОПУ 8, производят ориентирование и топопривязку РЛС, используя сигналы УОТ 4 и ОПУ 8 (Патент РФ №44879, «Устройство для преобразования углового перемещения антенны РЛС»).
При обзоре пространства сформированные ПУ 5 короткие зондирующие импульсы определенной частоты, задаваемой по команде с выхода 1 УОУ 6, подаются на вход 1 переключателя ППЛ 2 и с его выходов 1 или 2, в зависимости от команды с выхода 3 УОУ 6, через делители мощности, фазовращатели и циркуляторы диаграммообразующего устройства ФАР 3 поступают на верхнюю или нижнюю части приемопередающих линеек локационной антенны ФАР 3, которая излучает их в пространство, формируя в угломестной плоскости нижний или верхний широкие лучи на передачу с зоной обзора, зависящей от положения переключателя ППЛ 2 и начальной установки делителей мощности и фазовращателей диаграммообразующего устройства ФАР 3, обеспечивая обзор пространства до 400 км по дальности, до 200 км по высоте и до 45° по углу места.
Обзор пространства по азимуту осуществляется путем кругового вращения АМУ 1 с ФАР 3 при помощи ОПУ 8, управляемого по скорости устройством УОУ 6.
Принятые всеми n приемопередающими линейками локационной антенны ФАР 3 эхосигналы через циркуляторы ее диаграммообразующего устройства поступают на соответствующие приемные модули, где усиливаются, преобразуются в цифровой вид и поступают на вход УОУ 6, где их подвергают пространственно-временной обработке, формируя веер узких лучей на прием, перекрывающих всю угломестную зону обзора.
Данные об азимутальном положении ФАР 3 поступают на УОУ 6 с УОТ 4 и ОПУ 8 (с датчика угла поворота ФАР 3 в горизонтальной плоскости).
Данные о государственной принадлежности обнаруженных летательных объектов по запросу с входа-выхода 1 УОУ 6 поступают на УОУ 6 из ФАР 3 через АСГ 7.
На основании полученной информации УОУ 6 осуществляет обнаружение, опознавание, измерение координат и скорости, сопровождение летательных объектов, распознавание их типов и выдачу необходимой информации потребителям, а также управление работой РЛС и ее устройств.
Испытания предлагаемой РЛС показали, что время как свертывания, так и развертывания РЛС не превышает 15 минут.
Этот результат достигнут за счет размещения всех составных частей РЛС (кроме первичного источника электропитания) на едином транспортном средстве, что исключило разборку (сборку), погрузку (разгрузку) и электрические отключения (подключения) составных частей между собой, а также за счет введения УРС 9, что позволило сократить время свертывания и развертывания АМУ 1 с ФАР 3 (это время составляет около 5 минут) и время горизонтирования платформы транспортного средства.
Объединение в одной конструкции ФАР 3 локационной антенны и антенны системы госопознавания также способствует сокращению времени свертывания и развертывания АМУ 1 с ФАР 3.
Сокращению времени развертывания РЛС способствовало и введение УОТ 4, позволившее автоматизировать процесс ориентирования и топопривязки РЛС.
Введение в РЛС переключателя положения луча на передачу ППЛ 2 и формирование нижнего и верхнего лучей на передачу позволило существенно расширить пределы работы РЛС по высоте и углу места.
Таким образом, размещение всех составных частей РЛС (кроме источника первичного электропитания) на едином транспортном средстве как при работе, так и при транспортировании, объединение локационной антенны и антенны системы госопознавания в одной конструкции, введение в РЛС устройства ориентирования и топопривязки, устройства развертывания и свертывания и переключателя положения луча на передачу позволило расширить функциональные возможности РЛС за счет существенного повышения ее мобильности и расширения пределов работы по высоте и углу места.
Источники информации
1. Радиоэлектроника за рубежом. Обзоры, 1992, вып.6 (62) - 8 (64), с.42-43, 49-50.
2. Зарубежная радиоэлектроника №11/1991, с.4.
3. Radar System Forecast, 1stQuarter, 2003.
4. С.З.Кузьмин Цифровая радиолокация. Введение в теорию. - Киев: КВИЦ, 2000, - 428 с.: илл.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| Мобильная радиолокационная станция | 2017 |
|
RU2662447C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2017 |
|
RU2694711C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2289825C2 |
| ЛАЗЕРНО-РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2004 |
|
RU2263930C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| МОБИЛЬНАЯ РАДИОЛОКАЦИОННАЯ УСТАНОВКА ПОДСВЕТА И НАВЕДЕНИЯ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ ДЕЙСТВИЯ | 2000 |
|
RU2169333C1 |
Изобретение относится к радиолокации и может быть использовано для обнаружения, измерения координат, опознавания, сопровождения и распознавания на дальностях до 400 км широкого класса аэродинамических и баллистических объектов. Достигаемым техническим результатом изобретения является расширение функциональных возможностей радиолокационной станции (РЛС) за счет существенного повышения ее мобильности и пределов работы по высоте и углу места. Для достижения этого результата все входящие в РЛС устройства - антенно-мачтовое устройство, состоящее из фазированной антенной решетки (ФАР) и введенных в него переключателя положения луча на передачу в угломестной плоскости и устройства ориентирования и топопривязки, передающее устройство, устройство обработки и управления, аппаратура системы госопознования, опорно-поворотное устройство и введенное в РЛС устройство развертывания и свертывания - размещены на едином транспортном средстве как при работе, так и при транспортировании. Кроме того, локационная антенна и антенна системы госопознования объединены в одной конструкции ФАР. 1 ил.
Мобильная трехкоординатная радиолокационная станция (РЛС) дециметрового диапазона, включающая антенно-мачтовое устройство (АМУ), в которое входит фазированная антенная решетка (ФАР), состоящая из n идентичных горизонтальных приемопередающих линеек радиолокационной антенны, расположенных ярусами, диаграммообразующего устройства на передачу и n приемных модулей, аппаратуру системы госопознавания (АСГ), передающее устройство (ПУ), опорно-поворотное устройство (ОПУ) и устройство обработки и управления (УОУ), n входов которого соединены с n выходами ФАР для осуществления пространственно-временной обработки эхо-сигналов и формирования веера узких лучей на прием, перекрывающих всю угломестную зону обзора, при этом первый выход УОУ, являющийся выходом задания частоты зондирующих импульсов, соединен с ПУ, а второй выход является выходом РЛС и предназначен для выдачи информации потребителю, первый вход-выход УОУ соединен с первым входом-выходом АСГ и предназначен для получения информации о государственной принадлежности обнаруженных летательных аппаратов, при этом АСГ представляет собой систему «запроса-ответа», второй вход-выход УОУ соединен с входом-выходом ОПУ для управления скоростью ОПУ и получения информации об угле поворота ФАР в горизонтальной плоскости, при этом выход ОПУ механически связан с первым входом АМУ, отличающаяся тем, что в РЛС дополнительно введены переключатель положения луча на передачу (ПЛЛ) и устройство ориентирования и топопривязки (УОТ), входящие в состав АМУ, причем УОТ предназначено для осуществления автоматического ориентирования и топопривязки РЛС с использованием систем ГЛОНАСС и GPS, введены также устройство развертывания-свертывания (УРС) и транспортное средство (ТС), в состав ФАР введены линейки антенны госопознавания, причем первый и второй входы ППЛ соединены с выходом ПУ и третьим выходом УОУ соответственно, а первый и второй выходы - с первым и вторым входами ФАР для формирования в угломестной плоскости нижнего или верхнего широких лучей на передачу с зоной обзора, зависящей от положения ППЛ, вход-выход ФАР соединен со вторым входом-выходом АСГ для запроса и получения ответа о государственной принадлежности обнаруженных летательных объектов с последующей передачей информации в УОУ, выход УОТ соединен с (n+1)-м входом УОУ для предоставления данных об азимутальном положении ФАР, первый, второй и третий выходы УРС механически соединены соответственно с вторым входом АМУ, третьим входом ФАР и входом ТС, содержащего гидравлические опоры для горизонтирования его платформы, на которой размещены как в рабочем, так и в транспортном положении все входящие в РЛС устройства.
| Radar System Forecast, 1Quarter, 2003 | |||
| Приспособление для автоматического останова швейной машины при обрыве или доработке челночной нити | 1932 |
|
SU32288A1 |
| Молотилка | 1943 |
|
SU63943A1 |
| Устройство для стереограмметрической съемки | 1936 |
|
SU49285A1 |
| Управляющее устройство транспортного механизма | 1982 |
|
SU1022923A1 |
| 0 |
|
SU80506A1 | |
| US 5541603 A, 30.07.1996 | |||
| JP 2007271383 A, 18.10.2007. | |||

