Изобретение относится к технике освоения океана, а именно к подводным аппаратам с изменяемой плавучестью.
Известно устройство изменения плавучести подводного аппарата (патент RU №2124457, опубл. 10.01.1999 г.), содержащее герметичный прочный корпус с рабочей камерой цилиндрической формы с перемещаемым внутри ее поршнем, который соединен со стержнем, выходящим наружу корпуса, пространство под поршнем заполнено рабочей жидкостью, кипящей при температуре выше 0°С и находящейся в равновесии при давлении насыщенных паров, пространство над поршнем заполнено маслом и через металлическую трубку с управляемым клапаном соединяется с газогидроаккумулятором.
Недостатком является невозможность изменения скорости движения подводного аппарата в процессе погружения/всплытия.
Наиболее близким по совокупности существенных признаков к заявленному изобретению и принятым в качестве прототипа является устройство изменения плавучести подводного аппарата (Kobayashi Т, Asakawa K, Watanabe K, et al. New buoyancy engine for autonomous vehicles observing deeper oceans. In: Proceedings of ISOPE-2010; Beijing; 2010. p. 401-405). Устройство изменения плавучести подводного аппарата размещено в герметичном корпусе, в котором гидравлический приводной насос возвратно-поступательным движением поршня в цилиндре перемещает рабочую жидкость по трубопроводам с управляемыми клапанами между внешним ресивером переменного объема, изменение объема которого обеспечивает изменение плавучести, а, следовательно, скорости погружения/всплытия, и внутренним ресивером переменного объема.
Анализ технических характеристик прототипа показал, что наряду с таким достоинством как обеспечение изменения плавучести на глубинах 2000-4000 м, недостатком является высокое давление в гидравлической системе при больших глубинах погружения и, как следствие, ограничение по глубине погружения до 4000 м.
В основу изобретения поставлена техническая задача создания устройства изменения плавучести подводного аппарата, которое обеспечивает возможность работы подводного аппарата, как на малых, так и на больших глубинах погружения подводного аппарата (более 4000 м) с возможностью изменения скорости погружения/всплытия, а также стабилизации на заданной глубине.
Поставленная техническая задача достигается тем, что в герметичный корпус, содержащий гидравлический приводной насос, перемещаемую рабочую жидкость, трубопроводы, управляемые клапаны и внутренний ресивер переменного объема, помещен гидравлический цилиндр, в котором находится поршень, шток которого может выдвигаться через уплотнение в отверстии донышка цилиндра и корпуса в окружающую среду, причем надпоршневое и подпоршневое пространства гидравлического цилиндра посредством трубопроводов с управляемыми клапанами соединены с нагнетательной и всасывающей стороной приводного насоса и с внутренним ресивером переменного объема, при этом внешним ресивером переменного объема служит шток гидравлического цилиндра. Изменение длины части штока, выдвинутой в окружающую среду, обеспечивает заданное изменение плавучести подводного аппарата, а, следовательно, и скорости погружения/всплытия. Диаметр штока меньше диаметра поршня, что позволяет уменьшить давление в гидравлической системе и обеспечить большую глубину погружения. Кроме того, всасывающая сторона гидравлического приводного насоса устройства изменения плавучести подводного аппарата снабжена фильтром.
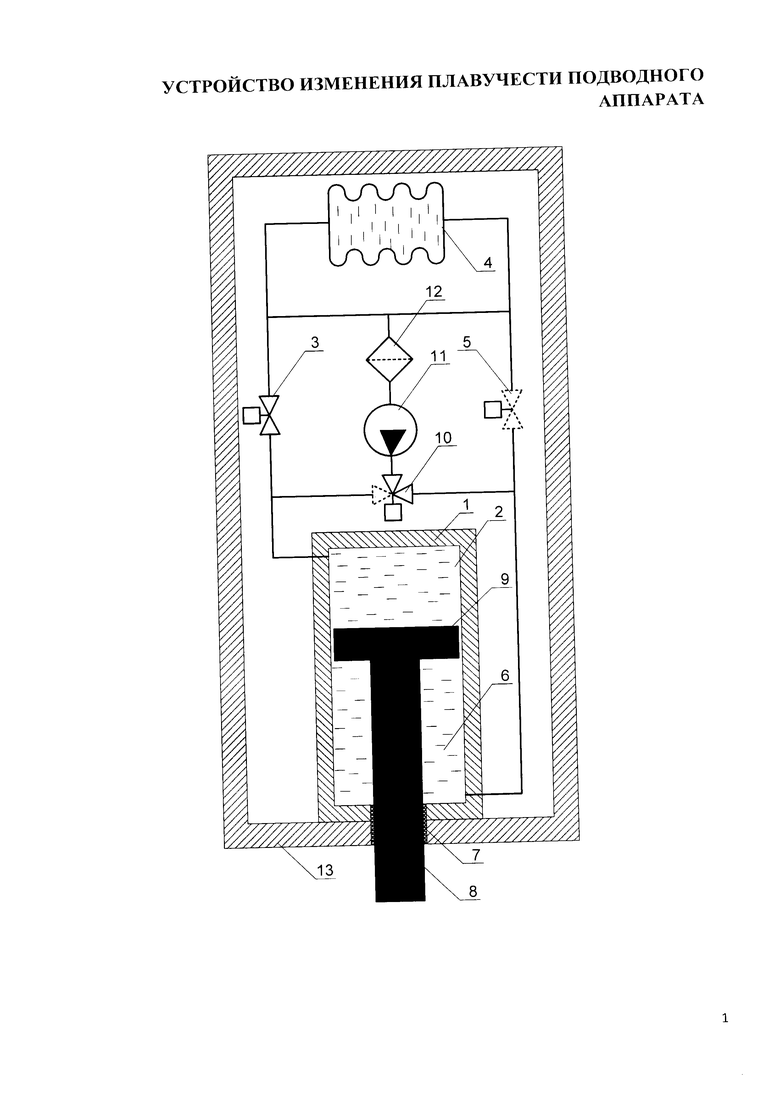
Суть заявленного изобретения объясняется чертежом, на котором изображена схема устройства изменения плавучести подводного аппарата.
Как показано на схеме, устройство изменения плавучести подводного аппарата расположено в герметичном корпусе 13 и содержит гидравлический цилиндр 1, заполненный рабочей жидкостью, в котором помещается поршень 9 со штоком 8, который может выдвигаться через уплотнение 7 отверстия в донышке цилиндра и герметичного корпуса в окружающую среду при перемещении поршня 9. Гидравлический цилиндр 1 соединен трубопроводами с гидравлическим приводным насосом 11, фильтром 12 и внутренним ресивером переменного объема 4. Встроенные в гидравлическую систему управляемые клапаны 3, 5 и 10 позволяют менять направление перемещения рабочей жидкости между надпоршневым 2 и подпоршневым 6 пространствами.
В качестве гидравлического приводного насоса может использоваться, например, шестеренный насос.
В качестве внутреннего ресивера переменного объема может использоваться, например, емкость на основе сильфона.
В качестве уплотнения могут использоваться, например, сальниковое или сильфонное уплотнение.
Заявляемое изобретение работает таким образом.
Устройство изменения плавучести подводного аппарата работает в двух режимах - всплытия и погружения.
При использовании устройства в режиме всплытия клапан 3 находится в положении «закрыто», а клапан 5 в положении «открыто», при этом клапан 10 переключает сторону нагнетания насоса 11 на надпоршневое пространство 2 цилиндра 1, а всасывающая сторона насоса 11 замыкается на подпоршневое пространство 6. Приведение в действие насоса 11 производит перемещение рабочей жидкости из подпоршневого пространства 6 в надпоршневое пространство 2, что приводит к перемещению поршня 9 вниз и выдвижению части штока 8 за пределы гидравлического цилиндра 1 через уплотнение 7 в окружающую среду, а это, в свою очередь, приводит к увеличению плавучести подводного аппарата. Внутренний ресивер переменного объема 4 необходим для компенсации объема жидкости эквивалентному объему штока, выдвинутому в окружающую среду, а также температурного расширения и сжимаемости рабочей жидкости. В процессе всплытия объем внутреннего ресивера переменного объема 4 уменьшается.
При использовании устройства в режиме погружения клапан 3 находится в положении «открыто», а клапан 5 в положении «закрыто», при этом клапан 10 переключает сторону нагнетания насоса 11 на подпоршневое пространство 6 цилиндра 1, а всасывающая сторона насоса 11 замыкается на надпоршневое пространство 2. Приведение в действие насоса 11 производит перемещение рабочей жидкости из надпоршневого пространства 2 в подпоршневое пространство 6, что приводит к перемещению поршня 9 вверх и соответственно части штока 8 из окружающей среды в пределы гидравлического цилиндра 1 через уплотнение 7, а это, в свою очередь, приводит к уменьшению плавучести подводного аппарата. Внутренний ресивер переменного объема 4 необходим для компенсации объема жидкости эквивалентному объему штока, перемещенного внутрь цилиндра, а также температурного расширения и сжимаемости рабочей жидкости. В процессе погружения объем внутреннего ресивера переменного объема 4 увеличивается.
В результате осуществления заявляемого изобретения получаем устройство изменения плавучести подводного аппарата, которое обеспечивает возможность работы подводного аппарата как на малых, так и на больших глубинах погружения подводного аппарата (более 4000 м) с возможностью изменения скорости погружения/всплытия, а также стабилизации на заданной глубине.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 2017 |
|
RU2668937C1 |
| Подводный аппарат планирующего типа | 2020 |
|
RU2747106C1 |
| Планирующий подводный аппарат | 2020 |
|
RU2747522C1 |
| Необитаемый подводный аппарат для глубоководных погружений | 2020 |
|
RU2733190C1 |
| Способ выполнения фото/видеосъемки донных объектов на максимальных глубинах с минимальным искажением и устройство для его осуществления | 2023 |
|
RU2821406C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПО ГЛУБИНЕ ПОДВОДНОГО АППАРАТА, ИСПОЛЬЗУЮЩЕЕ ТЕПЛОВУЮ ЭНЕРГИЮ ОКРУЖАЮЩЕЙ СРЕДЫ | 1998 |
|
RU2130401C1 |
| СИСТЕМА ДЛЯ ИЗМЕНЕНИЯ ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 2015 |
|
RU2602640C1 |
| ПОГРУЖНОЙ ПЛУНЖЕРНЫЙ НАСОС | 2018 |
|
RU2677955C1 |
| УСТАНОВКА ПОГРУЖНАЯ ЭЛЕКТРОГИДРОПРИВОДНАЯ | 2015 |
|
RU2579790C1 |
| УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА ПЕРЕДВИЖЕНИЯ ПО ВЕРТИКАЛИ ПОДВОДНОГО АППАРАТА ЗА СЧЁТ СОЛНЕЧНОЙ ЭНЕРГИИ, ИСПОЛЬЗУЮЩЕЕ УПРАВЛЕНИЕ ЕГО ПЛАВУЧЕСТЬЮ | 2016 |
|
RU2662570C2 |
Изобретение относится к технике освоения океана, а именно к подводным аппаратам с изменяемой плавучестью. Устройство изменения плавучести подводного аппарата расположено в герметичном корпусе и содержит гидравлический приводной насос, перемещаемую рабочую жидкость, трубопроводы, управляемые клапаны и внутренний ресивер переменного объема, а также гидравлический цилиндр. Шток гидравлического цилиндра установлен с возможностью передвижения между внешней окружающей средой и внутренним объемом гидравлического цилиндра, реализуя функции внешнего ресивера переменного объема. Диаметр штока меньше диаметра поршня, а надпоршневое и подпоршневое пространства гидравлического цилиндра соединены с гидравлическим приводным насосом и внутренним ресивером посредством трубопроводов и управляемых клапанов. Достигается обеспечение возможности работы как на малых, так и на больших глубинах погружения подводного аппарата. 1 з.п. ф-лы, 1 ил.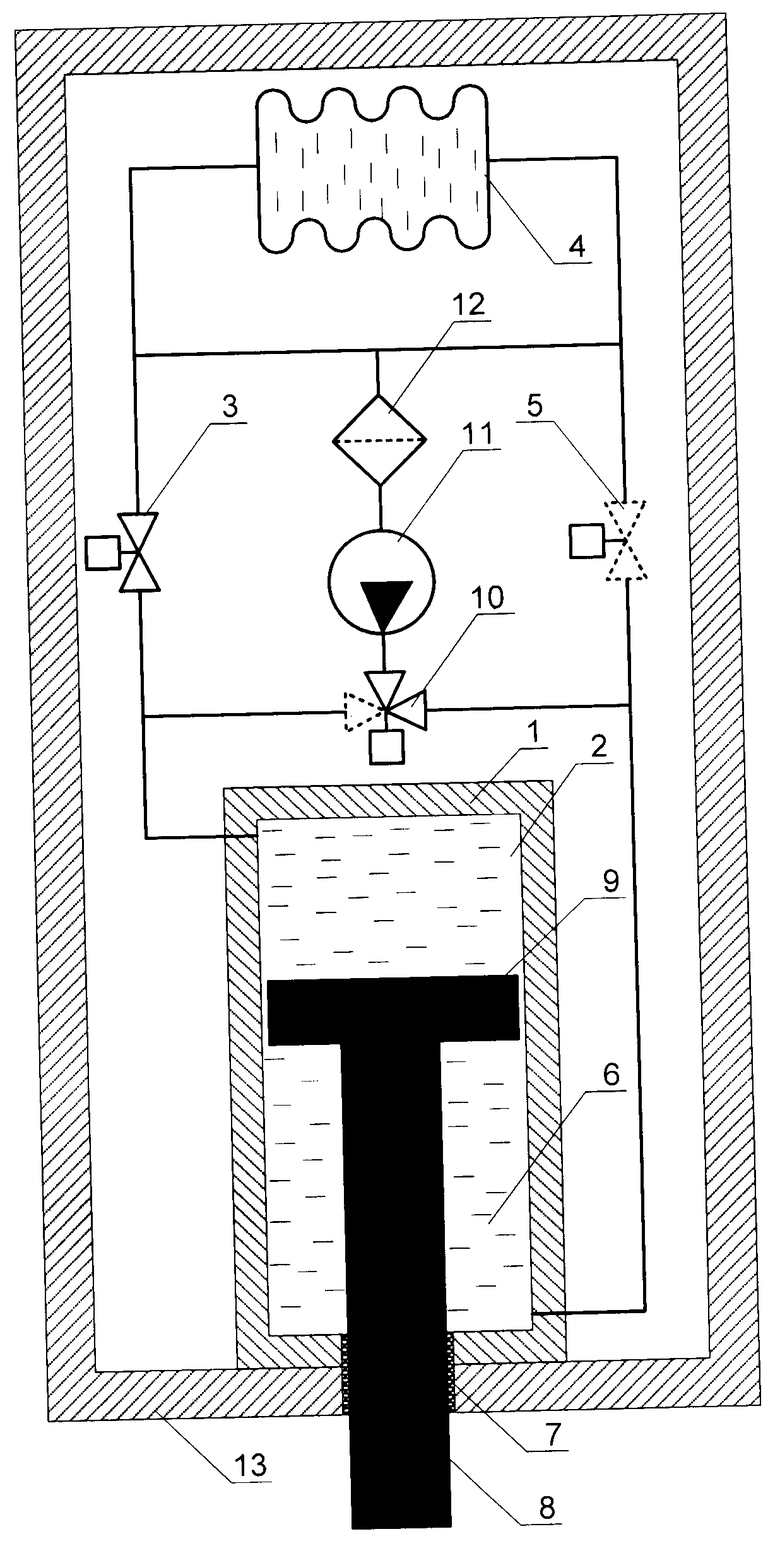
1. Устройство изменения плавучести подводного аппарата, расположенное в герметичном корпусе, содержащее гидравлический приводной насос, перемещаемую рабочую жидкость, трубопроводы, управляемые клапаны и внутренний ресивер переменного объема, отличающееся тем, что содержит гидравлический цилиндр, шток которого установлен с возможностью передвижения между внешней окружающей средой и внутренним объемом гидравлического цилиндра, реализуя функции внешнего ресивера переменного объема, при этом диаметр штока меньше диаметра поршня, а надпоршневое и подпоршневое пространства гидравлического цилиндра соединены с гидравлическим приводным насосом и внутренним ресивером посредством трубопроводов и управляемых клапанов.
2. Устройство изменения плавучести подводного аппарата по п.1, отличающееся тем, что всасывающая сторона гидравлического приводного насоса снабжена фильтром.
| СПОСОБ И УСТРОЙСТВО (ВАРИАНТЫ) ПЕРЕМЕЩЕНИЯ ПО ГЛУБИНЕ ПОДВОДНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТЕМПЕРАТУРНОГО ГРАДИЕНТА МОРСКОЙ СРЕДЫ | 1998 |
|
RU2124457C1 |
| Рама транспортного средства | 1987 |
|
SU1532411A1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЛАВУЧЕСТЬЮ ПРОНИЦАЕМОГО ПОДВОДНОГО АППАРАТА | 2005 |
|
RU2296693C1 |
| JP 62187692 A, 17.08.1987. | |||

