Изобретение относится к судостроению, конкретно к автономным необитаемым подводным самоходным аппаратам (планерам-глайдерам) и может быть использовано для исследования водных акваторий.
Известен подводный аппарат «Дениз» типа «ныряющее блюдце» (см. Войтов Д.В. Подводные обитаемые аппараты / Д.В. Войтов - М.: Издательство Астрель, 2002. - стр. 84-89). Корпус подводного аппарата имеет форму сплющенной сферы. Движение аппарата обеспечивается за счет того, что кормовой насос перекачивает воду через пластиковые трубы, огибающие прочный стальной корпус. Эти гибкие трубы оканчиваются соплами, способными поворачиваться в вертикальной плоскости и выбрасывать воду под любым углом. Меняя угол поворота сопел и ток воды в них можно осуществлять различные маневры подводного аппарата.
Недостатки данного подводного аппарата связаны со значительным расходом энергии, затрачиваемой на создание струйного течения в соплах и, соответственно, на движение и маневрирование подводного аппарата, а также с трудностями в реализации механизма поворота сопел на значительных глубинах из-за высокого забортного давления, что снижает его надежность и живучесть, ухудшает маневренные характеристики и может быть причиной навигационных аварий.
Известен подводный аппарат, содержащий полый корпус в форме двояковыпуклой линзы с гребными винтами, рулем и сквозным каналом (пат. RU №2356780, опубл. 27.05.2009, МПК: B63G 8/00). В сквозном канале расположен движитель в виде винта Архимеда с возможностью реверсивного вращения и обеспечения движения подводного аппарата по вертикали. Гребные винты установлены напротив друг друга по периметру корпуса неподвижно на кронштейнах с возможностью изменения частоты их вращения, что обеспечивает маневрирование подводного аппарата.
Недостатки данного подводного аппарата связаны со значительным расходом энергии, затрачиваемой на вращение гребных винтов и винта Архимеда в сквозном канале, а также с трудностями в реализации вращения винта Архимеда на значительных глубинах из-за высокого забортного давления, что снижает его надежность и живучесть, ухудшает маневренные характеристики и может быть причиной навигационных аварий.
Известно устройство изменения плавучести подводного аппарата с гидравлическим усилителем и внутренним расположением ресивера переменного объема (см. Дологлонян А.В., Сухов А.К., Стаценко И.Н. Устройство изменения плавучести подводных аппаратов для глубоководных измерений / Научно-технический журнал «Фундаментальные и прикладные проблемы техники и технологии» №4-2 (330), 2018. - стр. 209). Предложенное устройство снижает нагрузку на гидронасос рабочей жидкости и обеспечивает изменение плавучести подводного аппарата на глубинах более 4000 м.
Недостатки данного устройства изменения плавучести связаны с тем, что в прочном корпусе расположен лишь один гидравлический цилиндр, это снижает надежность и живучесть подводного аппарата.
Известен подводный поисковый аппарат, принимаемый за прототип (описание полезной модели к патенту RU 192170 U1, опубл. 05.09.2019, МПК: B63G 8/00). Подводный поисковый аппарат включает корпус, выполненный в виде эллипсоида вращения, движители горизонтального хода, видеокамеру и кабель-трос, соединяющий аппарат с судном-носителем. При этом вертикальная ось корпуса аппарата лежит в плоскости мидель-шпангоута и аппарат дополнительно содержит устройство изменения положения центра тяжести, расположенное внутри корпуса, в свою очередь, движители горизонтального хода закреплены на корпусе в плоскости мидель-шпангоута.
Недостатки данного подводного аппарата связаны с тем, что устройство изменения положения центра тяжести, расположенное внутри корпуса, не позволяет изменять плавучесть аппарата, что ограничивает возможности маневрирования подводного аппарата по глубине и может являться причиной навигационных аварий. Кроме того, глубина погружения подводного аппарата имеет ограничение 150 м, что снижает его надежность и живучесть.
Задачей изобретения является повышение безопасности управления подводным аппаратом планирующего типа за счет улучшения маневренности подводного аппарата планирующего типа по глубине, уменьшение вероятности навигационных аварий и, тем самым, повышение его надежности и живучести.
Технический результат изобретения заключается в повышении безопасности управления подводным аппаратом планирующего типа при выполнении им сложного маневрирования за счет значительного увеличения глубины погружения, тем самым, уменьшается вероятность навигационных аварий. Кроме того, снижается нагрузка на гидронасосы рабочей жидкости, что обеспечивает изменение плавучести подводного аппарата планирующего типа на глубинах более 4000 м и повышает его надежность и живучесть.
Сущность изобретения заключается в том, что подводный аппарат планирующего типа содержит корпус, выполненный в виде эллипсоида вращения. При этом корпус, выполненный в виде эллипсоида вращения с образованием проницаемой части, снабжен прочным корпусом и размещенной в нем системой управления плавучестью, состоящей из гидравлических цилиндров, управляемых клапанов, ресиверов переменного объема, поршней со штоками, гидронасосов рабочей жидкости. Причем система управления плавучестью разделена на независимо работающие исполнительные тракты, расположенные симметрично относительно вертикальной оси подводного аппарата планирующего типа. Штоки поршней имеют в проницаемой части разную длину и, соответственно, разный объем для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно вертикальной оси подводного аппарата планирующего типа, с возможностью накренения и, соответственно, маневрирования подводного аппарата планирующего типа по глубине и курсу. Повышаются маневренные характеристики подводного аппарата планирующего типа при изменении глубины и курса, снижется нагрузка на гидронасосы рабочей жидкости, что обеспечивает изменение плавучести подводного аппарата планирующего типа на глубинах более 4000 м и повышает его надежность и живучесть.
Сущность изобретения поясняется чертежом, где
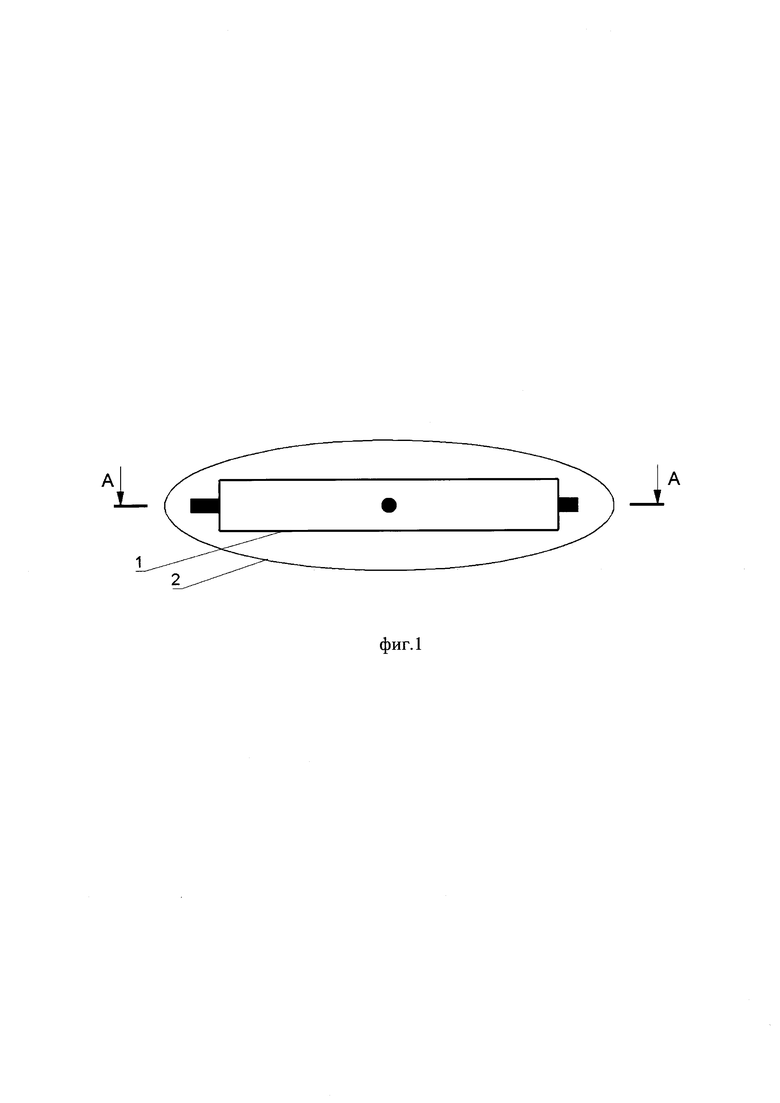
на фиг. 1 - показана схема, отражающая расположение гидравлических цилиндров на виде сбоку;
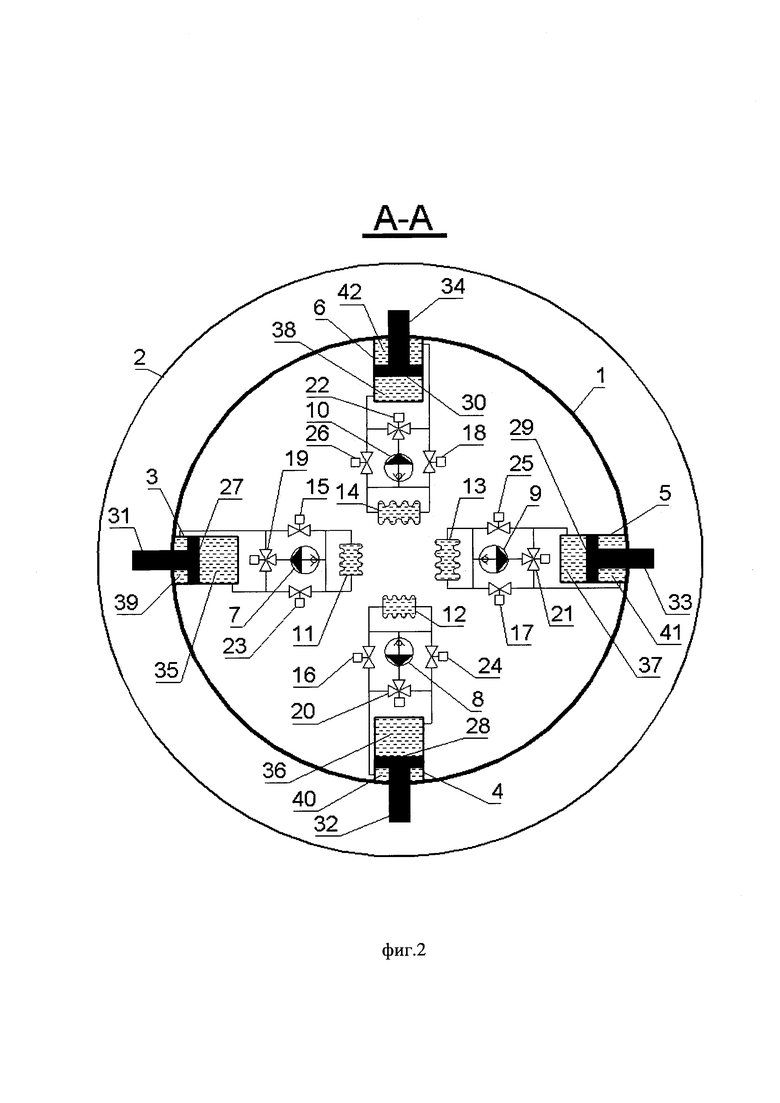
на фиг. 2 - показана схема, отражающая устройство системы управления плавучестью.
Подводный аппарат планирующего типа состоит их прочного корпуса 1, заключенного в корпус 2 в виде эллипсоида вращения с образованием проницаемой части и системы управления плавучестью 3-42, которая разделена, например, на четыре независимо работающих исполнительных тракта 3,7,11,15,19,23,27,31,35,39; 4,8,12,16,20,24,28,32,36,40; 5,9,13,17,21,25,29,33,37,41 и 6,10,14,18,22,26,30,34,38,42 расположенных симметрично относительно вертикальной оси подводного аппарата планирующего типа. Исполнительные тракты системы управления плавучестью состоят из гидравлических цилиндров 3,4,5,6, гидронасосов рабочей жидкости (обычно минеральное масло) 7,8,9,10, ресиверов переменного объема 11,12,13,14, управляемых клапанов 15,16,17,18,19,20,21,22,23,24,25,26, поршней 27,28,29,30 со штоками 31,32,33,34, при этом штоки поршней 31,32,33,34 входят в проницаемую часть подводного аппарата. Гидравлические цилиндры 3,4,5,6 имеют надпоршневое пространство 35,36,37,38 и подпоршневое пространство 39,40,41,42.
Штоки поршней 31,32,33,34 имеют в проницаемой части разную длину и, соответственно, разный объем для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно вертикальной оси подводного аппарата планирующего типа, с возможностью накренения и, соответственно, маневрирования подводного аппарата планирующего типа по глубине и курсу.
Подводный аппарат планирующего типа работает следующим образом.
В режиме всплытия управляемые клапаны 23,24,25,26 находится в положении «закрыто», а управляемые клапаны 15,16,17,18 в положении «открыто», при этом управляемые клапаны 19,20,21,22 переключают сторону нагнетания гидронасосов 7,8,9,10 на надпоршневое пространство 35,36,37,38, а всасывающая сторона гидронасосов 7,8,9,10 замыкается на подпоршневое пространство 39,40,41,42. Приведение в действие гидронасосов 7,8,9,10 производит перемещение рабочей жидкости из подпоршневого пространства 39,40,41,42 в надпоршневое пространство 35,36,37,38, что приводит к перемещению поршней 27,28,29,30 и выдвижению штоков 31,32,33,34 за пределы гидравлических цилиндров 3,4,5,6 в проницаемую часть, а это, в свою очередь, приводит к увеличению плавучести подводного аппарата планирующего типа. Ресиверы переменного объема 11,12,13,14 необходимы для компенсации объема жидкости эквивалентного объему штоков 31,32,33,34 выдвинутых в проницаемую часть, а также температурного расширения и сжимаемости рабочей жидкости. В режиме погружения управляемые клапаны 23,24,25,26 находится в положении «открыто», а управляемые клапаны 15,16,17,18 в положении «закрыто», при этом управляемые клапаны 19,20,21,22 переключают сторону нагнетания гидронасосов 7,8,9,10 на подпоршневое пространство 39,40,41,42, а всасывающая сторона гидронасосов 7,8,9,10 замыкается на надпоршневое пространство 35,36,37,38. Приведение в действие гидронасосов 7,8,9,10 производит перемещение рабочей жидкости из надпоршневого пространства 35,36,37,38 в подпоршневое пространство 39,40,41,42, что приводит к перемещению поршней 27,28,29,30 и соответственно штоков 31,32,33,34 из проницаемой части в пределы гидравлических цилиндров 3,4,5,6 а это, в свою очередь, приводит к уменьшению плавучести подводного аппарата планирующего типа. Ресиверы переменного объема 11,12,13,14 необходимы для компенсации объема жидкости эквивалентного объему штоков 31,32,33,34, перемещенных внутрь гидравлических цилиндров 3,4,5,6, а также температурного расширения и сжимаемости рабочей жидкости. Независимая работа трактов системы управления плавучестью, приводит к разной длине и, соответственно, разному объему штоков 31,32,33,34 в проницаемой части. Это, в свою очередь, смещает точку приложения равнодействующей силы избыточной плавучести относительно вертикальной оси подводного аппарата планирующего типа, что приводит к накренению и, соответственно, маневрированию подводного аппарата планирующего типа по глубине и курсу.
Таким образом, повышаются маневренные характеристики подводного аппарата планирующего типа, тем самым увеличивается точность и повышается безопасность управления подводным аппаратом планирующего типа при выполнении им сложного маневрирования и уменьшается вероятность навигационных аварий. Кроме того, снижается нагрузка на гидронасосы рабочей жидкости, что обеспечивает изменение плавучести подводного аппарата планирующего типа на глубинах более 4000 м и повышает его надежность и живучесть.
| название | год | авторы | номер документа |
|---|---|---|---|
| Планирующий подводный аппарат | 2020 |
|
RU2747522C1 |
| Планирующий подводный аппарат | 2020 |
|
RU2731590C1 |
| Необитаемый подводный аппарат для глубоководных погружений | 2020 |
|
RU2733190C1 |
| Способ выполнения фото/видеосъемки донных объектов на максимальных глубинах с минимальным искажением и устройство для его осуществления | 2023 |
|
RU2821406C1 |
| Подводный планер-глайдер | 2017 |
|
RU2669244C1 |
| АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНО-НАДВОДНЫЙ АППАРАТ ПЛАНЕРНОГО ТИПА | 2024 |
|
RU2831312C1 |
| УСТРОЙСТВО ИЗМЕНЕНИЯ ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 2017 |
|
RU2669468C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПЛАВУЧЕСТИ ПОДВОДНОГО АППАРАТА | 2017 |
|
RU2668937C1 |
| Планирующий подводный аппарат | 2023 |
|
RU2811163C1 |
| Подводный планер-глайдер | 2024 |
|
RU2834250C1 |
Изобретение относится к судостроению, а именно к автономным необитаемым подводным самоходным аппаратам для исследования водных акваторий. Подводный аппарат планирующего типа содержит корпус, выполненный в виде эллипсоида вращения. При этом корпус выполнен в виде эллипсоида вращения с образованием проницаемой части, снабжен прочным корпусом и размещенной в нем системой управления плавучестью, состоящей из гидравлических цилиндров, управляемых клапанов, ресиверов переменного объема, поршней со штоками, гидронасосов рабочей жидкости. Причем система управления плавучестью разделена на независимо работающие исполнительные тракты, расположенные симметрично относительно вертикальной оси подводного аппарата планирующего типа. Штоки поршней могут иметь в проницаемой части разную длину и, соответственно, разный объем для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно вертикальной оси подводного аппарата планирующего типа с возможностью накренения и, соответственно, маневрирования подводного аппарата планирующего типа по глубине и курсу. Достигается повышение маневренных характеристик подводного аппарата при изменении глубины и курса и повышение его надежности и живучести. 2 ил.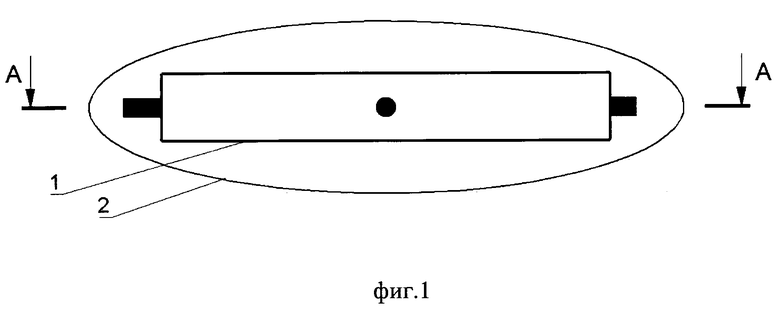
Подводный аппарат планирующего типа, содержащий корпус, выполненный в виде эллипсоида вращения, отличающийся тем, что корпус, выполненный в виде эллипсоида вращения с образованием проницаемой части, снабжен прочным корпусом и размещенной в нем системой управления плавучестью, состоящей из гидравлических цилиндров, управляемых клапанов, ресиверов переменного объема, поршней со штоками, гидронасосов рабочей жидкости, причем система управления плавучестью разделена на независимо работающие исполнительные тракты, расположенные симметрично относительно вертикальной оси подводного аппарата планирующего типа, штоки поршней имеют в проницаемой части разную длину и, соответственно, разный объем для осуществления смещения точки приложения равнодействующей силы избыточной плавучести относительно вертикальной оси подводного аппарата планирующего типа с возможностью накренения и, соответственно, маневрирования подводного аппарата планирующего типа по глубине и курсу.
| КРИСЛЛЛЛИЗАТОР | 0 |
|
SU192170A1 |
| WO 2005016742 A1, 24.02.2005 | |||
| ПОДВОДНЫЙ ПОИСКОВЫЙ АППАРАТ | 1991 |
|
RU2039678C1 |
| CN 108639286 B, 19.06.2020 | |||
| Планирующий подводный аппарат | 2020 |
|
RU2731590C1 |

