Изобретение относится к радиосвязи и может быть применено в системах связи с использованием абсолютного (системного или всемирного) точного времени.
Известен (патент РФ №2377723, МПК Н04В 7/00, опубл. 27.12.2009 г., Бюл. №36) способ передачи дискретных сообщений по каналам радиосвязи с тактовой и цикловой синхронизацией передатчика и приемника, который осуществляется постоянно вне зависимости от факта передачи сообщения и используется при скорости манипуляции, которая обеспечивает длительность элементов сообщения, во много раз превосходящую время распространения сигнала или возможную разность времен распространения сигнала от передатчика до приемника, а начало передачи каждого очередного элемента сообщения производят в заранее определенные моменты абсолютного всемирного и/или системного точного времени, а также начало передачи каждого очередного знака сообщения производится в заранее определенные моменты абсолютного всемирного и/или системного точного времени, с определением времени распространения сигнала от передатчика до приемника и на передатчике формируют сообщения с опережением на время распространения сигнала или в приемнике задерживают моменты принятия решений о значении принимаемых элементов и знаков на время распространения сигнала от передатчика до приемника сообщений.
Технический результат - повышение точности тактовой и цикловой синхронизации в системах связи с использованием либо принимаемых информационных сигналов, либо специальных сигналов, сформированных от внутреннего (системного) высокостабильного эталона частоты, либо внешних сигналов источников абсолютного мирового точного времени, поступающих на радиостанции сети по отдельным каналам, в тех случаях, когда длительность элементов сообщения, во много раз превосходит время распространения сигнала или возможную разность времен распространения сигнала от передатчика до приемника, а начало передачи каждого очередного элемента сообщения производится в заранее определенные моменты абсолютного системного и/или мирного точного времени, а также начало передачи каждого очередного знака сообщения производится в заранее определенные моменты абсолютного системного и/или всемирного точного времени, с определением времени распространения сигнала от передатчика до приемника и на передатчике формируются сообщения с опережением на время распространения сигнала или в приемнике задерживаются на время распространения сигнала моменты принятия решений о значении принимаемых элементов и знаков.
Рассинхронизация передатчика и приемника на 10% длительности элементарной посылки приводит к энергетическим потерям на уровне вероятности ошибки 10-2 равным 2 дБ, а на уровне 10-3 порядка 7 дБ [Бернард Скляр. Цифровая связь. Теоретические основы и практическое применение, 2-е издание.: Пер. с англ. - М.: Издательский дом «Вильяме», 2003., рис. 10.15 на стр. 651]. Поэтому повышение точности тактовой и цикловой синхронизации имеет большое практическое значение.
Современные первичные стандарты частоты имеют стабильность 1⋅10-11÷1⋅10-15 (К. Одуан, Б. Гино. Измерение времени. Основы GPS. - М.: Техносфера, 2002. С. 172, рис. 6.11).
Если оснастить средства связи высокостабильными опорными генераторами (ОГ), то коррекцию частоты можно будет производить с периодом в несколько лет. Однако габариты высокостабильных ОГ относительно велики. Стоимость таких генераторов также очень большая, зачастую превосходящая стоимость всего комплекта приемо-передающей аппаратуры. Поэтому нет возможности оснастить высокостабильными ОГ все средства связи в сети и, в лучшем случае, можно позволить иметь такого рода высокостабильный ОГ в одном экземпляре на всю сеть связи и использовать его в качестве эталонного, по которому сверяются частоты всех ОГ периферийных устройств данной сети связи (системное точное время).
Расстройка по времени на 10% длительности элементарной посылки может произойти в зависимости от скорости манипуляции за время, которое указано в таблице 1 (в случае максимально возможного расхождения ОГ передатчика и приемника в разные стороны относительно номинального значения частоты).
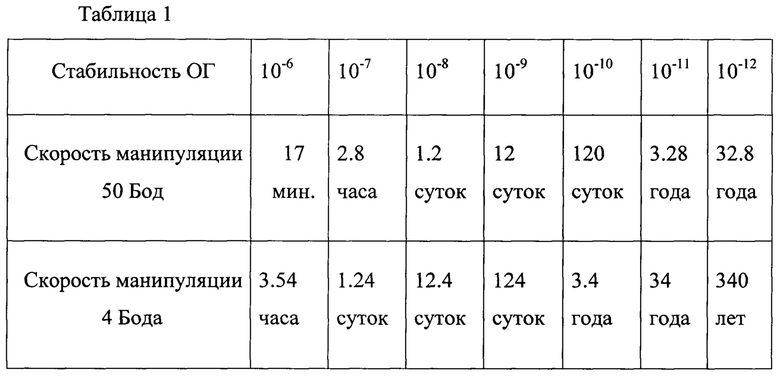
Как следует из таблицы 1 для скорости манипуляции 50 Бод вполне удовлетворительным является стабильность ОГ 10-10, а для скорости манипуляции 4 Бода, соответственно, 10-9, при которых коррекцию частоты ОГ можно производить всего 2-3 раза в год.
В современных радиопередатчиках и радиоприемниках используются кварцевые ОГ, в лучшем случае, с термокомпенсацией и с термостатированием, стабильность которых не превышает значений 1⋅10-6÷1⋅10-8. Частота таких ОГ должна подвергаться коррекции для скорости манипуляции 50 Бод с периодом от четверть часа до суток, а для скорости манипуляции 4 Бода, соответственно, с периодом от 3-х часов до полумесяца.
Основной причиной нестабильности ОГ является непостоянство температуры окружающей ОГ среды. Кроме того, дестабилизирующими факторами являются также старение пьезоэлементов с течением времени, изменение питающего напряжения, вибрация, влажность и атмосферное давление.
Наиболее высокие показатели температурной стабильности достигаются с помощью цифровой и гибридной термокомпенсации [Косых А.В. Источники высокостабильных колебаний на основе кварцевых генераторов с цифровой термокомпенсацией: Дис. … док. техн. наук / ОмГТУ - Омск. - 2006. - 489 с.]. Цифровая термокомпенсация на основе микроконтроллера позволяет применять автоматизированные технологии температурной компенсации, производить коррекцию частоты с помощью микропроцессоров.
Наиболее распространенным на сегодняшний день способом повышения стабильности частоты ОГ радиостанций являются коррекция их частоты по принимаемым ими специальным или информационным сигналам. Для этой процедуры используются устройства фазовой автоподстройки частоты (ФАПЧ). [У. Томаси "Электронные системы связи" М: Техносфера, 2007. - 1358 стр]. Аналоговые схемы ФАПЧ требуют постоянного присутствия внешнего сигнала и прекращают выполнять функцию коррекции частоты с исчезновением этого сигнала, что является существенным недостатком такого метода повышения стабильности ОГ. Появление схем аналого-цифрового и цифро-аналогового преобразования позволяет сохранять коррекцию частоты ОГ на длительное время и тем самым продолжать обеспечивать синхронную работу модулятора и кодера передатчика и демодулятора и декодера приемника, когда передача очередного сообщения заканчивается, а передача следующего сообщения производится не сразу, а после некоторого интервала времени. Сигнал управления частотой ОГ в цифровых схемах коррекции частоты вырабатывается с учетом скорости изменения и знака разности фаз (например, положительного, когда частота ОГ выше номинальной, или отрицательного, когда частота ОГ ниже номинальной) между принимаемым сигналом и сигналом, сформированным на базе колебаний опорного генератора. Цифровые схемы коррекции частоты ОГ приемо-передатчиков с запоминанием результата коррекции на длительное время позволяют принимать сообщения с первой информационной элементарной посылки без предварительно передаваемых последовательностей - преамбул, обеспечивающих тактовую и цикловую синхронизацию. Недостатком как аналоговых, так и цифровых схем ФАПЧ является то, что при частотной манипуляции для их функционирования перед передачей сообщений требуется специальная передача несущего колебания. Режимы амплитудной и фазовой манипуляции позволяют производить коррекцию частоты одновременно с передачей сообщений [Петрович Н.Т. Передача дискретной информации в каналах с фазовой манипуляцией. - М.: Сов. радио, 1965. - 263 с.]. Однако ФАПЧ, обеспечивая когерентность приема сигналов, не гарантирует сохранения тактовой и цикловой синхронизации в течение интервала времени, когда на входе приемного устройства отсутствует сигнал.
Для обеспечения тактовой и цикловой синхронизации в современных системах связи используются устройства фазовой автоподстройки частоты, регенераторы дискретных сигналов, специальные сигналы, которые передаются в составе сообщения и предшествуют передаваемой информации (так называемые преамбулы). Все перечисленные методы базируются на использовании для синхронизации передаваемого сигнала и требуют для вхождения в синхронизм определенного отрезка времени, т.е. фактически снижают скорость передачи сообщения. При относительно низких скоростях манипуляции (например, 4 Бода) дополнительные затраты времени на синхронизацию крайне не желательны. Например, если передается команда, которая содержит двузначное число, состоящее из 16 бит, то при скорости манипуляции 4 Бода для синхронизации требуется дополнительное время, которое сравнимо с временем передачи самого сообщения, т.е. фактическая скорость передачи сообщения уменьшается в два раза и вместо 4-х секунд для передачи команды требуется 8 секунд, что в некоторых случаях может оказаться критичным. Желательно, как это предлагается в данном изобретении, обеспечить прием сообщения с первой информационной посылки сразу же с поступлением сообщения в точку приема без дополнительной потери времени на передачу преамбулы. ОГ, используемые в настоящее время в радиостанциях, не имеют достаточно высокой стабильности для реализации такого рода алгоритма тактовой и цикловой синхронизации передатчиков и приемников. Поэтому целесообразно принимать меры для существенного повышения стабильности ОГ, используемых в современных системах радиосвязи.
Для коррекции частоты ОГ как приемных, так и передающих устройств могут служить сигналы навигационных спутниковых систем ГЛОНАСС и GPS. Но помимо факта обеспечения точного значения частоты колебания, которое выдает ОГ, необходимо уметь сохранять эту точность в течение как можно большего времени. Однако существующие системы синхронизации не способны сохранять достигнутую при автоподстройке частоты точность синхронизации на долгое время.
Известен способ коррекции частоты ОГ (прототип), описанный в патенте RU №2220439, опубл. 27.08.2003 г., заключающийся в том, что коррекцию частоты ОГ осуществляют с помощью специальной кнопки и блока индикации, при котором по показаниям эталонного измерителя времени нажатием кнопки коррекции хода запускают электронные часы и измеряют длительность режима коррекции, через целое количество часов определяют суммарную погрешность хода, далее вычисляют погрешность хода за единицу времени и корректируют ход часов в соответствии с вычисленным значением погрешности. Через целое количество часов, прошедших с момента запуска режима коррекции, в соответствии с показаниями эталонного измерителя времени повторно нажимают кнопку коррекции. По повторному нажатию кнопки коррекции определяют завершение режима коррекции, пересчитывают измеренное значение длительности режима коррекции в секунды и вычисляют секундную погрешность хода, причем операции по определению начала и завершения режима коррекции хода, измерению длительности режима коррекции, пересчету длительности режима коррекции в секунды, вычислению секундной погрешности хода и коррекции хода выполняют с помощью микропроцессора в соответствии с программой, записанной в ПЗУ электронных часов.
Недостатком этого метода коррекции стабильности ОГ является то, что операция коррекции автоматизирована не на 100% и требует в течение коррекции частоты ОГ двойного ручного нажатия кнопки, определяющего начало и конец коррекции частоты ОГ, а определение необходимой для коррекции погрешности определяется в секундах и часы (в нашем случае датчик опорных частот) выдают метки времени, например, секундные, которые отличаются по точному местоположению на оси времени на величины, кратные целому значению секунд, что недопустимо в случае работы систем связи, т. к. длительность элементов сообщения даже при предельно низких скоростях составляет всего лишь доли секунды.
Приемлемая рассинхронизация по времени датчиков временных меток на передающей и приемной стороне канала связи не должна составлять долей длительности элементарных посылок, т.е. должна исчисляться в миллисекундах.
Задачу повышения точности тактовой и цикловой синхронизации с длительным хранением достигнутой точности и последовательным ее повышением возможно решить производя периодическую коррекцию точности ОГ передатчиков и приемников с помощью имеющихся в составе этих ОГ управляемых реактивных элементов, которыми обычно являются варикапы. При этом необходимо обеспечить достаточно длительное автономное и точное хранение уровня напряжения, которое подается на управляемый реактивный элемент. Это возможно реализовать с помощью процессора, имеющего достаточно большую разрядность квантователя, которая обеспечивает необходимый шаг изменения выходного напряжения, гарантирующий требуемую точность управления частотой ОГ.
Такого рода управление частотой ОГ с помощью реактивных элементов в настоящее время широко используется в ОГ с термокомпенсацией, когда управляющее напряжение, подаваемое на варикап вырабатывается процессором и зависит от температуры окружающей ОГ среды [Косых А.В. Источники высокостабильных колебаний на основе кварцевых генераторов с цифровой термокомпенсацией : Дис. … док. техн. наук / ОмГТУ - Омск. - 2006. - 489 с.].
Таким образом, задача коррекции частоты ОГ сводится к вопросу определения значения отклонения частоты ОГ от номинального значения и определения величины управляющего напряжения, которое корректирует частоту ОГ и максимально возможно приближает ее к номинальному значению.
Определить значение отклонения частоты ОГ от номинального значения возможно аналогично тому, как это делается в прототипе изобретения [патент №2220439], измеряя интервал времени At между имеющими место в точке приема сигнала импульсами тактовой/цикловой синхронизации, которые вырабатываются с использованием колебаний ОГ автономно (без подстройки по принимаемым информационным или каким-либо внешним сигналам) и теми моментами времени, которые соответствуют более точному местоположению импульсов тактовой/цикловой синхронизации, которые вырабатываются в результате подстройки по принимаемым информационным или каким-либо внешним сигналам, полученным от источников точного времени. Одновременно определяется интервал времени ΔT, который соответствует разнице времен с момента предшествующей коррекции и момента измерения времени расхождения между импульсами полученными автономно и посредством подстройки по внешним сигналам (информационным или полученными от внешних источников точного времени). Отношение Δt/ΔT=ε является оценкой стабильности ОГ. Отстройка по оси частот ОГ Δf, имеющего номинальное значение генерируемой им частоты F0, будет равна Δf=F0⋅ε. Знак отстройки зависит от того, какие импульсы приходят опережающими - от автономного датчика импульсов тактовой/цикловой синхронизации, или полученных путем подстройки. Если автономные импульсы приходят раньше тех, которые получены путем подстройки по принимаем из вне информационным или от источников точного времени, то частоту ОГ необходимо уменьшать. В противном случае частоту ОГ необходимо увеличивать.
Зависимость частоты ОГ от величины управляющего напряжения U можно легко определить [Косых А.В. Источники высокостабильных колебаний на основе кварцевых генераторов с цифровой термокомпенсацией: Дис. … док. техн. наук / ОмГТУ - Омск. - 2006. - 489 с.]. Такая зависимость на ограниченном интервале частот может быть представлена в виде линейной зависимости: F=K0+k⋅U. Если требуется более высокая точность аппроксимации зависимости частоты ОГ от управляющего напряжения, то можно воспользоваться степенными полиномами 2-го или более высокого порядка. При линейной аппроксимации номинальное значение частоты ОГ равно F0=K0+k⋅U0.
Итак, если известна величина ±Δf - отклонение частоты ОГ от номинального значения, то необходимо с помощью изменения управляющего напряжения U обеспечить генерацию ОГ номинальной частоты F0. Отклонение частоты ОГ от номинального значения Δf=F-F0 может принимать как положительные, так и отрицательные значения. Отсюда ±Δf=k(U-U0) и управляющее напряжение U для ликвидации отклонения частоты ОГ от номинального значения должно принимать, соответственно, значение U=U0±Δf/k.
Таким образом, алгоритм коррекции частоты ОГ заключается в следующем:
1. Определяется интервал времени Δt между автономно полученными с помощью колебаний ОГ импульсами тактовой/цикловой синхронизации и оценками моментов времени точного местоположения этих импульсов, полученных путем подстройки по принимаемым информационным сигналам, или сигналам, полученным от иных источников точного времени.
2. Определяется интервал времени ΔT в течение которого произошла расстройка по времени на величину Δt.
3. Определяется величина отстройки ОГ по частоте Δf, которая соответствует расстройке по времени Δt:
Δf=±F0⋅Δt/ΔT
4. Зная зависимость отклонения частоты ОГ от величины управляющего напряжения ±Δf=k(U-U0), определяют величину напряжения, которая обеспечивает номинальное значение частоты ОГ:
U=U0±Δf/k.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ ПО КАНАЛАМ РАДИОСВЯЗИ | 2007 |
|
RU2377723C2 |
| Способ повышения стабильности частоты опорных генераторов в системах связи | 2023 |
|
RU2824951C1 |
| СПОСОБ ЭНЕРГЕТИЧЕСКИ СКРЫТНОЙ ПЕРЕДАЧИ ДИСКРЕТНЫХ СООБЩЕНИЙ ПО КАНАЛАМ РАДИОСВЯЗИ | 2015 |
|
RU2608178C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА СИГНАЛОВ РАДИОСТАНЦИИ | 2005 |
|
RU2292641C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ПОИСКА РАДИОСТАНЦИЙ | 1994 |
|
RU2099868C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ ТОЧНОГО ВРЕМЕНИ | 1990 |
|
RU2033640C1 |
| СИСТЕМЫ И СПОСОБЫ БЕСПРОВОДНОЙ СВЯЗИ ДЛЯ СИСТЕМ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ (МРТ) | 2016 |
|
RU2728328C2 |
| СПОСОБ СВЯЗИ СВЕРХШИРОКОПОЛОСНЫМИ СИГНАЛАМИ С ПОВЫШЕННОЙ СТАБИЛЬНОСТЬЮ СИНХРОНИЗАЦИИ | 2010 |
|
RU2433532C1 |
| Устройство для передачи сигналов точного времени | 1984 |
|
SU1205165A1 |
| СПОСОБ ПОЛУЧЕНИЯ ИОНОГРАММ | 2013 |
|
RU2552530C2 |
Изобретение относится к радиосвязи и может быть применено в системах связи с использованием абсолютного точного времени. Технический результат - повышение точности тактовой и цикловой синхронизации. В данном способе длительность элементов сообщения во много раз превосходит время распространения сигнала или возможную разность времен распространения сигнала от передатчика до приемника, а начало передачи каждого очередного элемента сообщения производится в заранее определенные моменты абсолютного точного времени. Периодическая цикловая коррекция частоты опорного генератора с кварцевой стабилизацией осуществляется с помощью управляющего напряжения. В начале очередного цикла фиксируется допустимое значение расстройки по времени передающих и приемных устройств системы связи, по достижению которой определяется время, в течение которого расстройка произошла и производится оценка отклонения частоты опорного генератора от номинального значения, относительно которой формируется управляющее напряжение, обеспечивающее генерацию опорным генератором частоты, предельно близкой к номинальной. После окончания очередного цикла коррекции частоты система устанавливается в начальное положение, после чего начинается следующий цикл. 3 з.п. ф-лы, 1 табл.
1. Способ повышения точности тактовой и цикловой синхронизации в системах связи, основанный на периодической цикловой коррекции частоты опорного генератора с кварцевой стабилизацией с помощью управляющего напряжения, поступающего от микропроцессора и подаваемого на реактивный элемент опорного генератора, значение реактивности которого зависит от этого напряжения, отличающийся тем, что с началом очередного цикла повышения точности тактовой и цикловой синхронизации измеряют модуль и определяют знак расстройки по времени передающих и приемных устройств системы связи, по достижению допустимого значения модуля расстройки по времени определяют время, в течение которого произошла эта расстройка, производят оценку отклонения частоты опорного генератора от номинального значения и, зная зависимость частоты опорного генератора от значения управляющего напряжения, которое воздействует на реактивный элемент управляемого по частоте опорного генератора, с микропроцессора подается такое напряжение, которое обеспечивает генерацию опорным генератором номинальной частоты, затем после окончания режима коррекции частоты микропроцессор ставит систему тактовой и цикловой синхронизации в начальное положение, после чего начинается следующий цикл работы описанного алгоритма повышения точности тактовой и цикловой синхронизации приемных и передающих устройств системы связи.
2. Способ по п. 1, отличающийся тем, что определение точного по времени местоположения импульсов тактовой и цикловой синхронизации производится по принимаемой бинарной последовательности независимо от вида манипуляции с использованием тактовых импульсов с выхода регенератора и импульсов цикловой синхронизации с выхода декодера.
3. Способ по п. 1, отличающийся тем, что определение точного по времени местоположения импульсов тактовой и цикловой синхронизации производится по специальным сигналам системного точного времени, передаваемым передающей радиостанцией сети.
4. Способ по п. 1, отличающийся тем, что определение точного по времени местоположения импульсов тактовой и цикловой синхронизации производится по специальным сигналам мирового точного времени, одновременно принимаемым от источников сигналов точного времени всеми приемо-передающими средствами сети связи.
| СПОСОБ КОРРЕКЦИИ ХОДА ЭЛЕКТРОННЫХ ЧАСОВ | 2001 |
|
RU2220439C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ ТОЧНОГО ВРЕМЕНИ | 1990 |
|
RU2033640C1 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| Устройство тактовой синхронизации | 1980 |
|
SU869074A1 |
| US 4370066 A1, 25.08.1983 | |||
| DE 3212270 A1, 13.12.1983. | |||

