Изобретение относится к области радионавигации, а конкретно - к аппаратуре потребителей, работающей по сигналам спутниковых радионавигационных систем (СРНС) ГЛОНАСС (Россия) и GPS (США) частотного диапазона L1, формирующей сигналы для определения местоположения, а также сигналы высокоточных меток времени, привязанных к шкале времени СРНС.
Аппаратура потребителей, работающая по сигналам ГЛОНАСС [1] и GPS [2] , используется для определения координат (широты, долготы, высоты) и скорости перемещения объекта, а также для формирования сигналов высокоточных меток времени. При этом использование сигналов частотного диапазона L1 c кодовой модуляцией С/А кодами - кодами "стандартной точности" - обеспечивает "стандартную" точность местоопределения.
Основные отличия между системами ГЛОНАСС и GPS состоят в использовании различных, хотя и соседних частотных диапазонов, в использовании отличающихся псевдослучайных модулирующих кодов, а также в использовании, соответственно, частотного и кодового разделения сигналов различных спутников. Так, в GPS в диапазоне частот L1 спутники излучают модулированные различными псевдослучайными кодами сигналы на одной несущей частоте 1575, 42 МГц, а спутники ГЛОНАСС излучают модулированные одним и тем же псевдослучайным кодом сигналы на различных несущих (литерных) частотах, лежащих в соседней частотной области. При этом для диапазона частот L1 нулевая литерная частота f0 = 1602 МГц, а интервал между литерными частотами Δf = 0,5625 МГц. Распределение литерных частот среди функционирующих спутников ГЛОНАСС задается альманахом, передаваемым в кадре служебной информации. Литерные частоты вводятся в соответствии с "Интерфейсным контрольным документом" [1] . В настоящее время используются литерные частоты "0" - "12", в дальнейшем предусматривается переход к литерным частотам "-7" - "4".
Несмотря на различия, существующие между системами GPS и ГЛОНАСС, их близость по назначению, баллистическому построению орбитальной группировки спутников и используемому частотному диапазону позволяет проектировать аппаратуру, работающую одновременно по сигналам этих двух систем. Достигаемый при этом результат состоит в повышении надежности, достоверности и точности определения местоположения, в частности, за счет возможности выбора рабочих созвездий спутников с лучшими значениями геометрических факторов [3, с. 160] .
Известен, см. , например, [3, с. 158-161, рис. 9.8] , приемник одноканальной аппаратуры потребителей, работающей по сигналам GPS и ГЛОНАСС частотного диапазона L1. Приемник содержит радиочастотный преобразователь, опорный генератор, средства для корреляционной обработки сигналов и средства для вычислений. В состав радиочастотного преобразователя входят частотный разделитель ("диплексер"), осуществляющий частотное разделение сигналов GPS и ГЛОНАСС, полосовые фильтры и малошумящие усилители каналов GPS и ГЛОНАСС, коммутатор, подающий на сигнальный вход первого смесителя сигналы GPS или ГЛОНАСС, коммутатор, подключающий на опорный вход первого смесителя сигнал первого гетеродина для преобразования сигналов GPS или ГЛОНАСС. В этом приемнике за счет соответствующего формирования частоты первого гетеродина первая промежуточная частота является постоянной для сигналов GPS и ГЛОНАСС и весь дальнейший тракт приемника, включающий второй смеситель и блок аналого-цифрового преобразования, реализуется как общий для этих сигналов. В состав средств для корреляционной обработки сигналов входят мультиплексор с постоянным запоминающим устройством, цифровой генератор литерных частот, генератор псевдослучайных кодов и цифровой коррелятор. В приемнике реализован мультиплексный (поочередный) режим работы по сигналам обеих систем GPS и ГЛОНАСС. Приемник не позволяет реализовать параллельную (многоканальную) обработку сигналов GPS и ГЛОНАСС, что увеличивает время, затрачиваемое на получение навигационной информации.
Известно устройство для приема сигналов СРНС [4] , в котором решается задача одновременного приема и многоканальной (параллельной) корреляционной обработки сигналов GPS и ГЛОНАСС, в частности, частотного диапазона L1 Функционально законченная часть устройства, осуществляющая прием и корреляционную обработку сигналов GPS и ГЛОНАСС частотного диапазона L1, включает в себя радиочастотный преобразователь, N канальный цифровой коррелятор, вычислитель, а также формирователь сигналов меток времени. Тактовый вход формирователя сигналов меток времени связан с тактовым выходом радиочастотного преобразователя. Выход измерительных стробов формирователя сигналов меток времени связан с соответствующими входами каждого из каналов N канального цифрового коррелятора. Формирователь сигналов меток времени и каналы N канального цифрового коррелятора связаны шиной обмена данными с вычислителем. Каждый из каналов N канального цифрового коррелятора содержит модуль корреляционной обработки и связанные с ним управляемые вычислителем цифровые генераторы несущей и кода. С помощью модуля корреляционной обработки, вычислителя и цифровых генераторов несущей и кода осуществляется выделение информации, содержащейся в принимаемом сигнале. Выделение информации производится с помощью замкнутых цифровых следящих систем корреляционной обработки, так называемых "схем слежения на несущей" и "схем слежения за задержкой", в процессе работы которых осуществляются формирование копий обрабатываемых сигналов и последующее корреляционное сравнение копий с самими сигналами. При этом управляемые вычислителем цифровые генераторы несущей и кода формируют необходимые для этого опорные сигналы.
Для целей цифровой корреляционной обработки сигналов, в том числе сигналов СРНС, управляемые вычислителем цифровые генераторы выполняются на основе накапливающих сумматоров, реализующих метод прямого цифрового синтеза частоты [5, с. 75-76, рис. 3.12; 6, с. 90-92, рис. 34] . Непосредственное управление от вычислителя, реализуемое в таких генераторах, обеспечивает требуемую точность формирования опорных сигналов, используемых в "схемах слежения за несущей", измеряющих доплеровский сдвиг, или "схемах слежения за задержкой", измеряющих сдвиг опорного кода относительно кода обрабатываемого сигнала [6, с. 87-90, рис. 33] .
Наиболее близким к заявляемому приемнику является известный приемник сигналов СРНС [7] , осуществляющий прием и многоканальную корреляционную обработку сигналов GPS и ГЛОНАСС частотного диапазона L1, в котором в каналах цифрового коррелятора в качестве генераторов несущей и кода применены управляемые цифровые генераторы, выполненные на основе накапливающего сумматора. Приемник сигналов СРНС, описанный в [7] , принят в качестве прототипа.
Приемник сигналов СРНС, принятый в качестве прототипа, содержит радиочастотный преобразователь, вход которого образует сигнальный вход приемника, N канальный цифровой коррелятор, тактовый и сигнальные входы каждого из каналов которого соединены с соответствующими выходами радиочастотного преобразователя, формирователь сигналов меток времени, тактовый вход которого соединен с тактовым выходом (выходом тактового сигнала) радиочастотного преобразователя, а выход измерительных стробов - с соответствующими входами каждого из каналов N канального цифрового коррелятора. Приемник-прототип содержит также вычислитель, связанный шиной обмена данными с формирователем сигналов меток и каналами N канального цифрового коррелятора.
Каждый из каналов N канального цифрового коррелятора приемника-прототипа содержит связанные с вычислителем шиной обмена данными модуль корреляционной обработки, цифровой генератор несущей и цифровой генератор кода. Каждый из указанных генераторов содержит связанные с вычислителем шиной обмена данными соответствующий накапливающий сумматор и соответствующий блок формирования отсчетов, подключенный к выходу данных накапливающего сумматора. Выходы опорных сигналов цифровых генераторов, образованные соответствующими выходами их накапливающих сумматоров, соединены с опорными входами модуля корреляционной обработки. Тактовые входы цифровых генераторов, образованные тактовыми входами их накапливающих сумматоров, и входы измерительных стробов, образованные входами измерительных стробов их блоков формирования отсчетов, соединены соответственно с тактовым входом и входом измерительных стробов модуля корреляционной обработки. Сигнальные входы, тактовый вход и вход измерительных стробов модуля корреляционной обработки образуют соответствующие входы канала N канального цифрового коррелятора.
В приемнике-прототипе радиочастотный преобразователь содержит входной блок, блок первого преобразования частоты сигналов GPS и ГЛОНАСС, первый и второй каналы второго преобразования частоты сигналов соответственно GPS и ГЛОНАСС, а также блок формирования сигналов тактовой и гетеродинных частот. Входной блок радиочастотного преобразователя, осуществляющий предварительную фильтрацию входных сигналов GPS и ГЛОНАСС, выполняется на основе полосового фильтра. Блок первого преобразования частоты сигналов радиочастотного преобразователя, осуществляющий первое преобразование частоты сигналов GPS и ГЛОНАСС, выполняется на основе смесителя, при этом смеситель использует сигнал первой гетеродинной частоты (Fr1). Первый и второй каналы второго преобразования частоты сигналов, осуществляющие второе преобразование частоты сигналов соответственно GPS и ГЛОНАСС, выполняются на основе полосовых фильтров, смесителей и блоков аналого-цифрового преобразования. Смесители первого и второго каналов используют соответственно сигналы второй (Fr2) и третьей (Fг3) гетеродинных частот. Выход тактового сигнала (сигнала тактовой частоты Fт) блока формирования сигналов тактовой и гетеродинных частот совместно с выходами каналов второго преобразования частоты сигналов образуют тактовый и сигнальные выходы радиочастотного преобразователя.
В приемнике-прототипе в каждом канале N канального цифрового коррелятора модуль корреляционной обработки содержит коммутатор входных сигналов, цифровые смесители, цифровые демодуляторы, программируемую линию задержки, генератор опорного С/А кода, блоки накопления и регистр управления. Опорные входы цифровых смесителей и генератора опорного С/А кода образуют опорные входы модуля. Сигнальные входы коммутатора входных сигналов образуют сигнальные входы модуля. Тактовые входы блоков накопления и программируемой линии задержки образуют тактовый вход модуля. Входы измерительных стробов генератора опорного С/А кода образуют вход измерительных стробов модуля. Выходы блоков накопления и входы-выходы данных генератора опорного С/А кода и регистра управления, образующие входы-выходы данных модуля, связаны шиной обмена данными с вычислителем.
Приемник-прототип работает следующим образом.
Принятые антенной сигналы GPS и ГЛОНАСС частотного диапазона L1 поступают на сигнальный вход радиочастотного преобразователя, где фильтруются в полосовом фильтре входного блока, преобразуются по частоте в смесителе блока первого преобразования частоты сигналов, затем разделяются по системам (GPS и ГЛОНАСС) в соответствующих каналах второго преобразования частоты сигналов, преобразуются по частоте (второе преобразование частоты) и подвергаются аналого-цифровому преобразованию, например двухбитовому квантованию по уровню.
С выхода радиочастотного преобразователя сигналы GPS и ГЛОНАСС поступают на соответствующие входы каналов N канального цифрового коррелятора, где осуществляется их цифровая корреляционная обработка. Вначале с помощью коммутатора входных сигналов выбираются сигналы одной из систем - GPS или ГЛОНАСС. Затем с помощью цифровых смесителей осуществляются выделение сигналов определенного спутника выбранной системы и перенос спектра этих сигналов на основную полосу частот (на нулевую частоту), для чего используются опорные сигналы, формируемые цифровым генератором несущей.
Опорные сигналы, формируемые цифровым генератором несущей, представляют собой коды текущих значений фазы опорной частоты. Цифровой генератор несущей управляется сигналами вычислителя, в частности, от вычислителя поступают данные кода частоты, устанавливающие дискрет приращения фазы на выходе накапливающего сумматора. Работа накапливающего сумматора осуществляется с частотой дискретизации, определяемой тактовой частотой Fт. Также в цифровом генераторе несущей с помощью блока формирования отсчетов формируются данные отсчета фазы несущей и данные отсчета циклов (периодов) несущей, которые с частотой измерительных стробов Fи поступают в вычислитель.
С выходов цифровых смесителей обрабатываемые сигналы поступают на сигнальные входы цифровых демодуляторов, которые осуществляют их корреляционное сравнение с точной "Р" (Punctual) и разностной "E-L" (Early-Late) копиями соответствующего опорного С/А кода (GPS или ГЛОНАСС). Указанные копии кода вырабатываются программируемой линией задержки, которая под управлением вычислителя (по сигналам, формируемым регистром управления) изменяет интервал между ранней "Е" и поздней "L" копиями С/А кода от 0,1 до 1 длительности символа С/А кода, формируя тем самым "узкий дискриминатор" ("узкий коррелятор") в системе слежения за кодом, как это описано, в частности, в [8 - 10] .
Соответствующий обрабатываемому сигналу опорный С/А код вырабатывается в каждом из каналов N канального цифрового коррелятора генератором опорного С/А кода, получающим для этого опорную тактовую частоту кода 1,023 МГц для GPS или 0,511 МГц для ГЛОНАСС. Выбор вида вырабатываемой псевдослучайной кодовой последовательности осуществляется на основе данных, поступающих с вычислителя через регистр управления. Формирование опорной тактовой частоты кода осуществляется с помощью цифрового генератора кода.
Цифровой генератор кода формирует текущие значения фазы опорной тактовой частоты С/А кода (1, 023 МГц для GPS, 0,511 МГц для ГЛОНАСС). Цифровой генератор кода управляется сигналами вычислителя, в частности, от вычислителя поступают данные о значении тактовой частоты кода, устанавливающие дискрет приращения фазы на выходе накапливающего сумматора. Работа накапливающего сумматора осуществляется с частотой дискретизации, определяемой тактовой частотой Fт. Также в цифровом генераторе кода с помощью его блока формирования отсчетов формируются данные отсчета долей символа кода, которые с частотой измерительных стробов Fи поступают в вычислитель.
Измерительные стробы (сигналы собственных меток времени приемника) формируются в формирователе сигналов меток времени под действием тактового сигнала, поступающего с выхода блока формирования сигналов тактовой и гетеродинных частот радиочастотного преобразователя, в соответствии с управляющими сигналами, поступающими с вычислителя, а также, при необходимости, под действием внешних синхронизирующих сигналов. В соответствии с измерительными стробами в приемнике-прототипе осуществляется внутренняя синхронизация процессов корреляционной обработки и навигационных измерений, в частности, производится отсчет квазидальности, фазы несущей и числа циклов несущей.
Результаты корреляционного сравнения накапливаются в соответствующих блоках накопления. Период накопления равен периоду С/А кода, т. е. 1 мс. Накопленные данные периодически считываются вычислителем, в котором реализуются все алгоритмы обработки сигналов, т. е. алгоритмы поиска сигналов, слежения за несущей и кодом, обработка служебной информации.
Как уже было отмечено выше, в приемнике-прототипе цифровые генераторы несущей и кода выполнены на основе накапливающего сумматора, реализующего метод прямого цифрового синтеза частоты с накоплением текущей фазы. Характеристики электропотребления накапливающего сумматора традиционной структуры зависят от частоты дискретизации, значение которой в приемнике-прототипе определяется тактовой частотой (Fт≈22 МГц), выбранной исходя из спектра обрабатываемых сигналов, а также от разрядности, определяемой исходя из требуемого дискрета установки частоты (приращения фазы). Практически в приемнике-прототипе для реализации задач корреляционной обработки сигналов цифровые генераторы несущей и кода должны иметь высокочастотный (примерно 20 МГц) и одновременно высокоразрядный (десятки разрядов) накапливающий сумматор. Однако цифровые генераторы несущей и кода, использующие такие высокочастотные и одновременно высокоразрядные накапливающие сумматоры, потребляют повышенную мощность, что может представлять проблему, в частности, для портативных многоканальных приемников сигналов СРНС, предназначенных для работы от автономного батарейного питания.
Технической задачей, на решение которой направлено заявляемое изобретение, является снижение потребляемой мощности приемника сигналов СРНС. Задача решается за счет нового выполнения цифровых генераторов несущей и кода, а именно переходом к двухчастотным цифровым генераторам, синтезирующим свои выходные сигналы из двух составляющих - высокочастотной и низкочастотной, при этом синтез высокочастотных составляющих осуществляется с частотой дискретизации, определяемой основной тактовой частотой Fт, а низкочастотных - с частотами дискретизации, определяемыми дополнительно формируемыми в приемнике низкочастотными тактовыми сигналами.
Сущность изобретения заключается в том, что в приемник сигналов спутниковых радионавигационных систем, содержащий радиочастотный преобразователь, вход которого образует сигнальный вход приемника, N канальный цифровой коррелятор, сигнальные и тактовые входы каждого из каналов которого соединены с соответствующими выходами радиочастотного преобразователя, вычислитель, а также формирователь сигналов меток времени, управляющий вход которого связан шиной обмена данными с вычислителем, тактовый вход - с тактовым выходом радиочастотного преобразователя, а выход измерительных стробов - с входами измерительных стробов каждого из каналов N канального цифрового коррелятора, причем каждый из каналов N канального цифрового коррелятора содержит связанные с вычислителем шиной обмена данными модуль корреляционной обработки, цифровой генератор несущей и цифровой генератор кода, а каждый из указанных цифровых генераторов содержит связанные с вычислителем шиной обмена данными накапливающий сумматор и блок формирования отсчетов, информационный вход которого подключен к выходу данных накапливающего сумматора, при этом выходы опорных сигналов указанных цифровых генераторов, образованные соответствующими выходами их накапливающих сумматоров, соединены с опорными входами модуля корреляционной обработки, тактовые входы указанных цифровых генераторов, образованные тактовыми входами их накапливающих сумматоров, и входы измерительных стробов, образованные входами измерительных стробов их блоков формирования отсчетов, соединены, соответственно, с тактовым входом и входом измерительных стробов модуля корреляционной обработки, тактовый вход, вход измерительных стробов и сигнальные входы которого образуют соответствующие входы канала N канального цифрового коррелятора, в отличие от прототипа введен формирователь дополнительных низкочастотных тактовых сигналов для цифрового генератора несущей и цифрового генератора кода, выполненный в виде делителя частоты и связанного с ним регистра отсчета фазы, причем тактовый вход делителя частоты соединен с тактовым выходом радиочастотного преобразователя, вход измерительных стробов регистра отсчета фазы соединен с выходом измерительных стробов формирователя сигналов меток времени, выход регистра отсчета фазы связан шиной обмена данными с вычислителем, а первый и второй выходы низкочастотных тактовых сигналов делителя частоты соединены соответственно с дополнительными входами цифрового генератора несущей и цифрового генератора кода каждого из каналов N канального коррелятора, при этом в каждом из указанных цифровых генераторов накапливающий сумматор выполнен в виде высокочастотного и низкочастотного накопительных модулей, а также содержит соединенные последовательно выходной комбинационный сумматор и выходной регистр фазы, причем высокочастотный накопительный модуль содержит последовательно соединенные первый регистр кода частоты, первый комбинационный сумматор и первый регистр фазы, выход которого подключен к второму входу первого комбинационного сумматора и к первому входу выходного комбинационного сумматора, низкочастотный накопительный модуль содержит последовательно соединенные второй регистр кода частоты, второй комбинационный сумматор и второй регистр фазы, выход которого подключен к второму входу второго комбинационного сумматора, а выход соответствующих старших разрядов - к второму входу выходного комбинационного сумматора, тактовый вход выходного регистра фазы и соединенный с ним тактовый вход первого регистра фазы высокочастотного накопительного модуля образуют тактовый вход накапливающего сумматора - тактовый вход цифрового генератора, тактовый вход второго регистра фазы низкочастотного накопительного модуля образует дополнительный вход цифрового генератора, информационные входы первого и второго регистров кода частоты высокочастотного и низкочастотного накопительных модулей образуют соответственно первый и второй управляющие входы накапливающего сумматора, связанные шиной обмена данными с вычислителем, выходы разрядов выходного регистра фазы и выходы соответствующих младших разрядов второго регистра фазы низкочастотного накопительного модуля образуют выход данных накапливающего сумматора, связанный через блок формирования отсчетов с вычислителем, а выходы соответствующих разрядов выходного регистра фазы образуют выход опорных сигналов цифрового генератора, соединенный с соответствующим опорным входом модуля корреляционной обработки канала N канального цифрового коррелятора.
Сущность заявляемого изобретения, возможность его осуществления и промышленного применения поясняются чертежами, представленными на фиг. 1-5, где:
на фиг. 1 представлена структурная схема заявляемого приемника сигналов СРНС в рассматриваемом примере реализации;
на фиг. 2 представлена обобщенная структурная схема цифровых генераторов несущей и кода заявляемого приемника сигналов СРНС в рассматриваемом примере реализации;
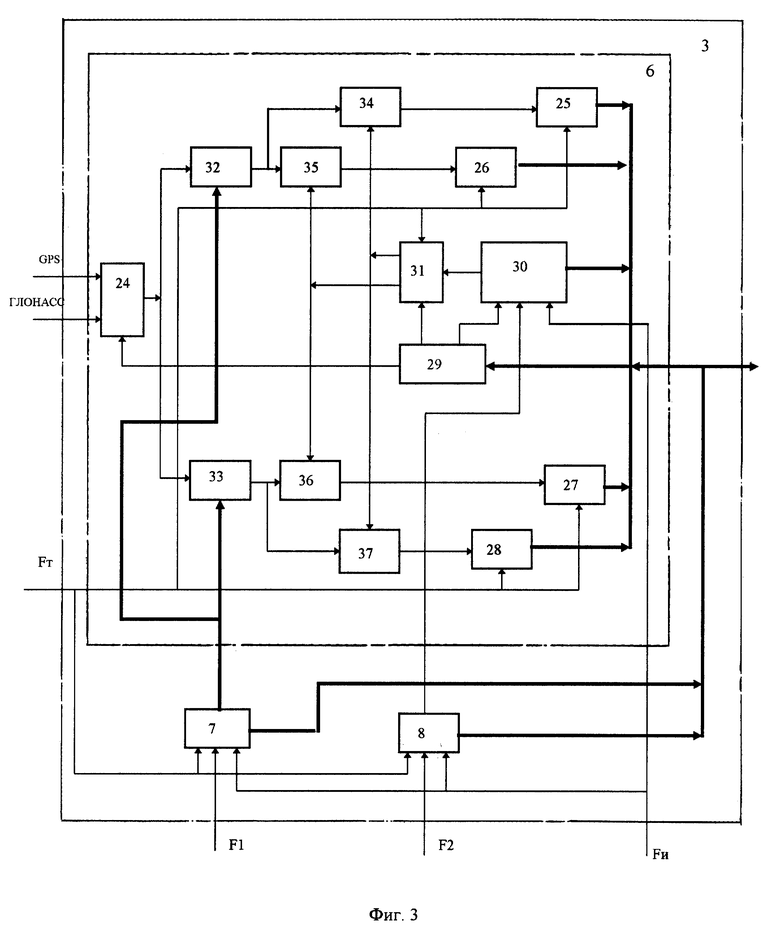
на фиг. 3 представлена структурная схема одного канала N канального цифрового коррелятора заявляемого приемника сигналов СРНС в рассматриваемом примере реализации, иллюстрирующая выполнение модуля корреляционной обработки;
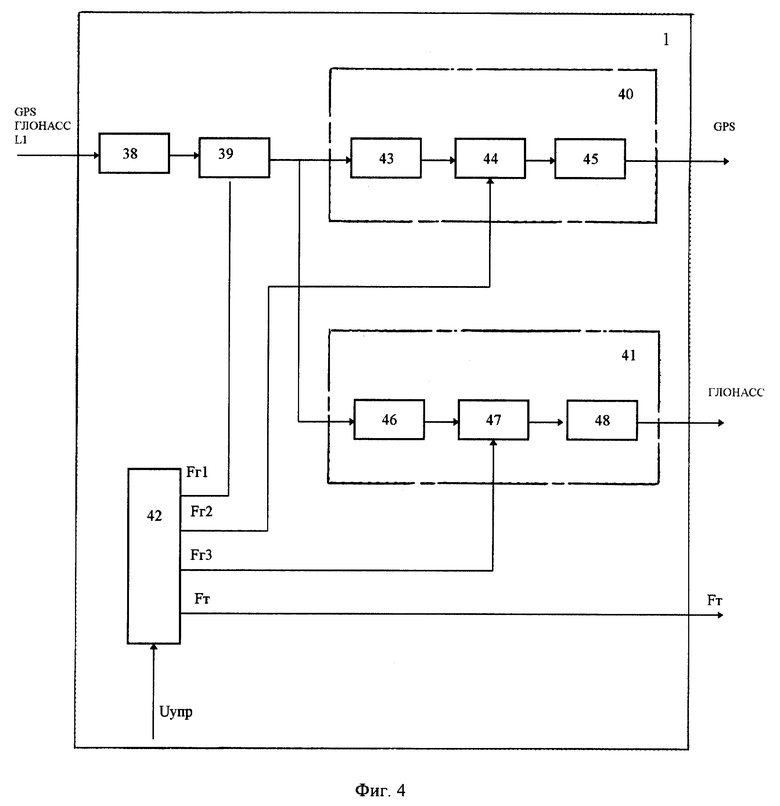
на фиг. 4 представлена структурная схема радиочастотного преобразователя заявляемого приемника сигналов СРНС в рассматриваемом примере реализации;
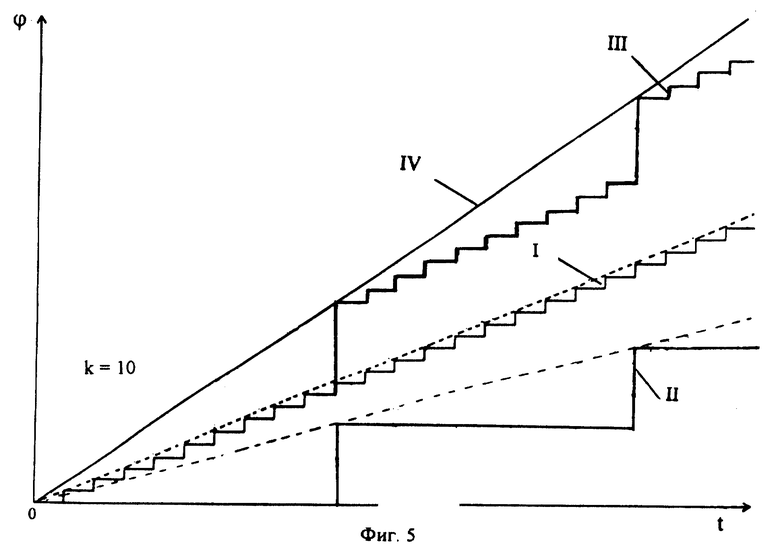
на фиг. 5 представлены графики, поясняющие принцип работы двухчастотных цифровых генераторов несущей и кода в заявляемом приемнике сигналов СРНС.
Заявляемый приемник сигналов СРНС в рассматриваемом примере реализации содержит, см. фиг. 1-4, радиочастотный преобразователь 1, вход которого образует сигнальный вход приемника, N канальный цифровой коррелятор 2, содержащий N каналов 3 (31, 32, . . . , 3N), сигнальные и тактовые входы которых соединены с соответствующими выходами радиочастотного преобразователя 1, вычислитель 4, связанный шиной обмена данными с каждым из N каналов 3 (31, 32, . . . , 3N), а также формирователь 5 сигналов меток времени, управляющий вход которого связан шиной обмена данными с вычислителем 4, тактовый вход соединен с тактовым выходом (выходом тактового сигнала Fт) радиочастотного преобразователя 1, а выход измерительных стробов (Fи) - с входами измерительных стробов каждого из N каналов 3 (31, 32, . . . , 3N) цифрового коррелятора 2.
Каждый из N каналов 3 (31, 32, . . . , 3N) цифрового коррелятора 2 содержит связанные с вычислителем 4 шиной обмена данными модуль 6 корреляционной обработки, цифровой генератор несущей 7 и цифровой генератор кода 8. Выход опорных сигналов цифрового генератора несущей 7 и выход опорных сигналов цифрового генератора кода 8 соединены с соответствующими опорными входами модуля 6. Тактовые входы цифровых генераторов 7 и 8 соединены с тактовым входом модуля 6. Входы измерительных стробов генераторов 7 и 8 соединены с входом измерительных стробов модуля 6. Сигнальные входы модуля 6, а также его тактовый вход и вход измерительных стробов образуют соответствующие входы каналов 3 (31, 32, . . . , 3N) цифрового коррелятора 2.
Заявляемый приемник сигналов СРНС содержит формирователь 9 дополнительных низкочастотных тактовых сигналов для цифрового генератора несущей 7 и цифрового генератора кода 8. Формирователь 9 содержит делитель частоты 10 и связанный с ним регистр 11 отсчета фазы. Тактовый вход делителя частоты 10 соединен с тактовым выходом (выходом тактового сигнала Fт) радиочастотного преобразователя 1. Вход измерительных стробов регистра 11 соединен с выходом измерительных стробов (Fи) формирователя 5 сигналов меток времени. Выход регистра 11 связан шиной обмена данными с вычислителем 4. Выходы первого (F1) и второго (F2) дополнительных низкочастотных тактовых сигналов делителя частоты 10 соединены с дополнительными входами соответственно цифрового генератора несущей 7 и цифрового генератора кода 8 каждого из каналов 3 (31, 32, . . . , 3N) цифрового коррелятора 2.
Цифровой генератор несущей 7 и цифровой генератор кода 8 в обобщенном виде (фиг. 2) содержат накапливающий сумматор 12 и блок 13 формирования отсчетов. Накапливающий сумматор 12 и блок 13 формирования отсчетов связаны шиной обмена данными с вычислителем 4, информационный вход блока 13 формирования отсчетов подключен к выходу данных накапливающего сумматора 12.
Выходы формируемых опорных сигналов цифрового генератора несущей 7 и цифрового генератора кода 8 образованы соответствующими выходами их накапливающих сумматоров 12. Эти выходы соединены с соответствующими опорными входами модуля 6. Тактовые входы цифровых генераторов 7 и 8 образованы тактовыми входами их накапливающих сумматоров 12. Эти входы соединены с тактовым входом модуля 6. Входы измерительных стробов цифровых генераторов 7 и 8 образованы входами измерительных стробов их блоков 13 формирования отсчетов. Эти входы соединены с входом измерительных стробов модуля 6.
Накапливающий сумматор 12 каждого из генераторов 7 и 8 выполнен в виде высокочастотного 14 и низкочастотного 15 накопительных модулей, а также содержит последовательно соединенные выходной комбинационный сумматор 16 и выходной регистр фазы 17. Высокочастотный 14 и низкочастотный 15 накопительные модули выполнены по известной схеме цифрового синтезатора, реализующего метод прямого цифрового синтеза частоты, см. , например, [5, с. 50-51, рис. 2.13] .
В каждом из генераторов 7 и 8 высокочастотный накопительный модуль 14 содержит последовательно соединенные первый регистр кода частоты 18, первый комбинационный сумматор 19 и первый регистр фазы 20, выход которого подключен к второму входу первого комбинационного сумматора 19 и к первому входу выходного комбинационного сумматора 16. Низкочастотный накопительный модуль 15 содержит последовательно соединенные второй регистр кода частоты 21, второй комбинационный сумматор 22 и второй регистр фазы 23, выход которого подключен к второму входу второго комбинационного сумматора 22, а выход соответствующих старших разрядов - к второму входу выходного комбинационного сумматора 16. Тактовый вход выходного регистра фазы 17 и соединенный с ним тактовый вход первого регистра фазы 20 высокочастотного накопительного модуля 14 образуют тактовый вход накапливающего сумматора 12 - тактовый вход соответствующего цифрового генератора 7, 8. Тактовый вход второго регистра фазы 23 низкочастотного накопительного модуля 15 образует дополнительный вход соответствующего цифрового генератора 7, 8. Информационные входы первого 18 и второго 21 регистров кода частоты высокочастотного 14 и низкочастотного 15 накопительных модулей образуют соответственно первый и второй управляющие входы накапливающего сумматора 12, связанные шиной обмена данными с вычислителем 4. Выходы разрядов выходного регистра фазы 17 и выходы соответствующих младших разрядов второго регистра фазы 23 низкочастотного накопительного модуля 15 образуют выход данных накапливающего сумматора 12, подключенный к информационному входу блока 13 формирования отсчетов, выход которого через шину обмена данными связан с вычислителем 4. Выходы соответствующих разрядов выходного регистра фазы 17 образуют в каждом из цифровых генераторов 7, 8 выход формируемых опорных сигналов.
В цифровых генераторах 7 и 8 на тактовый вход первого регистра фазы 20 высокочастотного накопительного модуля 14, а также на тактовый вход выходного регистра фазы 17 поступает высокочастотный тактовый сигнал частоты Fт. На тактовый вход второго регистра фазы 23 низкочастотного накопительного модуля 15 поступает низкочастотный тактовый сигнал, а именно, в генераторе 7 - низкочастотный тактовый сигнал частоты F1, а в генераторе 8 - низкочастотный тактовый сигнал частоты F2. Высокочастотный Fт и низкочастотные F1, F2 тактовые сигналы синхронны, что обеспечивается формированием низкочастотных тактовых сигналов F1 и F2 из тактового сигнала Fт путем деления частоты Fт в делителе частоты 10 формирователя 9.
В практических схемах комбинационные сумматоры 16, 19, 22 могут быть выполнены по схеме комбинационного сумматора с последовательным переносом, описанной, например, в [11, с. 523-536, рис. 6.96, 6.97] , что является предпочтительным с точки зрения уменьшения энергопотребления, или по схеме комбинационного сумматора с параллельным переносом, описанной, например, в [11, с. 523-536, рис. 6.100] . Регистры 17, 18, 20, 21, 23 могут быть выполнены в виде регистров памяти на основе триггеров (например, D-триггеров), обеспечивающих запись, хранение и считывание данных в параллельном двоичном коде, см. , например, [11, с. 348-354, рис. 5.85] . Также в практических схемах регистры 18 и 21 кода частоты помимо указанных информационных входов имеют входы записи (на фиг. 2 не показаны), по которым осуществляется запись входных данных в эти регистры. Также в практических схемах регистры 17, 18, 20, 21, 23 могут иметь входы обнуления (на фиг. 2 не показаны), на которые в начальный момент работы может подаваться обнуляющий сигнал, устанавливающий регистры в начальное (нулевое) состояние.
При совпадении своей обобщенной структурной схемы (фиг. 2) цифровые генераторы несущей 7 и кода 8 отличаются конкретным выполнением блоков 13 формирования отсчетов, разрядностями высокочастотных 14 и низкочастотных 15 накопительных модулей, а также конкретными значениями дополнительных тактовых частот F1 и F2, используемых низкочастотными накопительными модулями 15. Так, в цифровом генераторе несущей 7 блок 13 формирования отсчетов содержит регистр, формирующий в соответствии с измерительными стробами данные отсчета фазы несущей, снимаемые с выхода накапливающего сумматора 12, а также содержит последовательно соединенные счетчик циклов и регистр, формирующий в соответствии с измерительными стробами данные отсчета числа циклов (периодов) несущей, см. , например, [7, фиг. 5, элементы 41, 42, 44] . В цифровом генераторе кода 8 блок 13 формирования отсчетов содержит регистр, формирующий в соответствии с измерительными стробами данные отсчета долей символа кода, см. , например, [7, фиг. 5, элемент 45] . В цифровом генераторе несущей 7 элементы высокочастотного накопительного модуля 14 (первый регистр кода частоты 18, первый комбинационный сумматор 19, первый регистр фазы 20), выходной комбинационный сумматор 16 и выходной регистр фазы 17 выполнены K1 разрядными, а элементы низкочастотного накопительного модуля 15 (второй регистр кода частоты 21, второй комбинационный сумматор 22, второй регистр фазы 23) выполнены К2 разрядными, где К2>K1, например, К2= 25, K1= 5. В цифровом генераторе кода 8 аналогичные элементы высокочастотного накопительного модуля 14, а также выходной комбинационный сумматор 16 и выходной регистр фазы 17 выполнены К3 разрядными, а элементы низкочастотного накопительного модуля 15 выполнены К4 разрядными, где К4>К3, например, К4= 23, К3= 2. Работа низкочастотного накопительного модуля 15 цифрового генератора несущей 7 осуществляется с частотой дискретизации, определяемой первым дополнительным низкочастотным тактовым сигналом F1. Этот сигнал формируется формирователем 9 дополнительных низкочастотных тактовых сигналов путем деления основной тактовой частоты Fт на коэффициент k1, например k1= 10. Работа низкочастотного накопительного модуля 15 цифрового генератора кода 8 осуществляется с частотой, определяемой вторым дополнительным низкочастотным тактовым сигналом F2. Этот сигнал формируется формирователем 9 путем деления основной тактовой частоты Fт на коэффициент k2, например k2= 20. Практически в рассматриваемом случае вторая дополнительная тактовая частота F2 может формироваться из первой F1 путем ее деления на два.
В заявляемом приемнике сигналов СРНС модуль 6 корреляционной обработки каждого из каналов 3 (31, 32, . . . , 3N) цифрового коррелятора 2 может быть реализован в соответствии с известной, см. , например, [7, фиг. 4] , структурной схемой. В соответствии с этой схемой модуль 6 корреляционной обработки в рассматриваемом примере реализации содержит (фиг. 3) коммутатор 24 входных сигналов, блоки 25, 26, 27 и 28 накопления, регистр 29 управления, генератор 30 опорного С/А кода (GPS и ГЛОНАСС), программируемую линию задержки 31, цифровые смесители 32 и 33 соответственно синфазного и квадратурного каналов корреляционной обработки, цифровые демодуляторы 34, 35, 36, 37. Выходы накопленных данных блоков 25-28 накопления, входы-выходы данных регистра 29 управления и генератора 30 опорного С/А кода связаны посредством шины обмена данными с вычислителем 4. Первый ("GPS") и второй ("ГЛОНАСС") сигнальные входы коммутатора 24, образующие сигнальные входы модуля 6 (сигнальные входы канала 3), подключены к соответствующим сигнальным выходам радиочастотного преобразователя 1. Тактовые входы блоков 25-28 накопления и программируемой линии задержки 31, образующие тактовый вход модуля 6 (тактовый вход канала 3), подключены к тактовому выходу радиочастотного преобразователя 1. Входы измерительных стробов генератора 30 опорного С/А кода, образующие вход измерительных стробов модуля 6 (вход измерительных стробов канала 3), подключены к выходу измерительных стробов формирователя 5 сигналов меток времени. Управляющий вход коммутатора 24 подключен к первому выходу регистра 29 управления. Второй и третий выходы регистра 29 управления подключены соответственно к управляющему входу программируемой линии задержки 31 и первому управляющему входу генератора 30 опорного С/А кода. Выход коммутатора 24 соединен с первыми входами цифровых смесителей 32 и 33, вторые входы которых, образующие первый опорный вход модуля 6, подключены к выходу опорных сигналов цифрового генератора несущей 7. Выходы цифровых смесителей 32 и 33 соединены с первыми входами цифровых демодуляторов 34, 35 и 36, 37 соответственно. Вторые входы цифровых демодуляторов 34, 37 и 35, 36 соединены с соответствующими выходами программируемой линии задержки 31 - выходами точной "Р" (Punctual) и разностной "Е-L" (Early-Late) копий опорного С/А кода. Сигнальный вход программируемой линии задержки 31 соединен с выходом генератора 30 опорного С/А кода, формирующего С/А код GPS или ГЛОНАСС в зависимости от команд, поступающих от вычислителя 4. Второй управляющий вход генератора 30 опорного С/А кода, образующий второй опорный вход модуля 6, подключен к выходу опорных сигналов цифрового генератора кода 8. Выходы цифровых демодуляторов 34-37 подключены соответственно к входам блоков 25-28 накопления.
В заявляемом приемнике сигналов СРНС радиочастотный преобразователь 1 может быть реализован в соответствии с известной, см. , например, [7, фиг. 3] , структурной схемой. В соответствии с этой схемой радиочастотный преобразователь 1 в рассматриваемом примере реализации содержит (фиг. 4) входной блок 38, подключенный к его выходу блок 39 первого преобразования частоты сигналов GPS и ГЛОНАСС, а также подключенные к выходу блока 39 первый 40 и второй 41 каналы второго преобразования частоты сигналов соответственно GPS и ГЛОНАСС. К входу блока 38 подключается приемная антенна (на фиг. 4 не показана). В состав радиочастотного преобразователя 1 входит также блок 42 формирования сигналов тактовой и гетеродинных частот. Канал 40 второго преобразования частоты сигналов (канал второго преобразования частоты сигналов GPS) содержит последовательно соединенные фильтр 43, вход которого является входом канала, смеситель 44 и блок 45 аналого-цифрового преобразования, выход которого образует выход канала 40 - выход преобразованных сигналов GPS радиочастотного преобразователя 1. Канал 41 второго преобразования частоты сигналов (канал второго преобразования частоты сигналов ГЛОНАСС) содержит последовательно соединенные фильтр 46, вход которого является входом канала, смеситель 47 и блок 48 аналого-цифрового преобразования, выход которого образует выход канала 41 - выход преобразованных сигналов ГЛОНАСС радиочастотного преобразователя 1. В радиочастотном преобразователе 1 входной блок 38, решающий задачу предварительной фильтрации входных сигналов GPS и ГЛОНАСС частотного диапазона L1, содержит по крайней мере один полосовой фильтр; блок 39, решающий задачу первого преобразования частоты сигналов GPS и ГЛОНАСС, содержит по крайней мере один смеситель; в состав смесителей 44, 47 каналов 40, 41 входят преобразователи частоты и усилители, например усилители с регулируемым коэффициентом усиления; блоки 45, 48 аналого-цифрового преобразования могут быть выполнены, например, в виде пороговых устройств, реализующих функцию двухбитовых квантователей по уровню. Блок 42 формирования сигналов тактовой и гетеродинных частот содержит перестраиваемые синтезаторы частоты, выполненные на основе управляемых напряжением генераторов (ГУН) с цепями фазовой автоподстройки частоты (ФАПЧ), работающие от одного общего опорного генератора. В состав блока 42, при необходимости, могут входить переключаемые делители (умножители) частоты, обеспечивающие в совокупности с синтезаторами частоты формирование требуемой сетки тактовой и гетеродинных частот. При этом выход сигнала первой гетеродинной частоты ("Fr1") блока 42 связан с опорным входом блока 39, образованным опорным входом соответствующего смесителя, выходы сигналов второй ("Fr2") и третьей ("Fr3") гетеродинных частот блока 42 связаны с опорными входами смесителей 44, 47 каналов 40, 41. Выходы каналов 40 и 41, являющиеся сигнальными выходами радиочастотного преобразователя 1 ("GPS", "ГЛОНАСС"), подключены к соответствующим сигнальным входам каналов 3 (31, 32, . . . , 3N) цифрового коррелятора 2. Выход сигнала тактовой частоты ("Fт") блока 42, являющийся тактовым выходом радиочастотного преобразователя 1, связан с соответствующими тактовыми входами каналов 3 (31, 32, . . . , 3N) цифрового коррелятора 2, тактовым входом формирователя 5 сигналов меток времени и тактовым входом блока 9 формирования дополнительных низкочастотных тактовых сигналов для цифрового генератора несущей 7 и цифрового генератора кода 8 (фиг. 1). Вход управляющего сигнала ("Uyп") блока 42 предназначен для сигнала, осуществляющего, при необходимости, перестройку элементов блока 42 - синтезаторов и делителей (умножителей) частоты. Вход управляющего сигнала подключается, например, к вычислителю 4 посредством шины обмена данными (не показано).
Формирователь 5 сигналов меток времени, формирующий в заявляемом приемнике измерительные стробы (сигналы собственных меток времени приемника), в соответствии с которыми осуществляется внутренняя синхронизация процессов корреляционной обработки и навигационных измерений, в простейшем случае может быть выполнен, например, по известной схеме [7, фиг. 1, блоки 5-8] в виде счетчика, регистра периода и формирователя сигнала загрузки периода. При этом первый вход счетчика, являющийся входом тактового сигнала Fт, соединен с первым входом формирователя сигнала загрузки периода, выход счетчика, являющийся выходом измерительных стробов Fи (выходом собственных меток времени приемника), соединен с вторым входом формирователя сигнала загрузки периода, выход формирователя сигнала загрузки периода соединен с вторым входом счетчика, третий вход счетчика соединен с выходом регистра периода, вход регистра периода является управляющим входом формирователя 5. В регистр периода по сигналам, формируемым вычислителем 4, записывается число, определяющее значение периода следования формируемых сигналов меток времени - измерительных стробов Fи. Это число в момент времени, устанавливаемый по сигналу переполнения счетчика, с помощью формирователя сигнала загрузки периода загружается в счетчик. Момент загрузки синхронизирован тактовым сигналом Fт, поступающим на первый вход формирователя 5 с тактового выхода радиочастотного преобразователя 1. После загрузки счетчик заполняется импульсами тактового сигнала до тех пор, пока не наступит переполнение. При переполнении на выходе счетчика формируется новый сигнал временной метки - новый измерительный строб Fи, после чего процесс повторяется.
Составляющие радиочастотный преобразователь 1 элементы, узлы и блоки являются известными элементами, узлами и блоками, используемыми в технике приема и корреляционной обработки сигналов СРНС. Так, входной блок 38 радиочастотного преобразователя 1 может быть реализован в виде полосового керамического фильтра; блок 39 первого преобразования частоты сигналов может быть реализован на базе стандартного смесителя, например микросхемы типа МС13142 фирмы MOTOROLA; фильтры 43, 46 могут быть реализованы в виде полосовых фильтров на поверхностно-акустических волнах (ПАВ); смесители 44, 47 и входящие в их состав усилители с регулируемым коэффициентом усиления могут быть реализованы, например, с использованием микросхем типа UPC2753 фирмы NEC; блоки 45, 48 аналого-цифрового преобразования могут быть реализованы с использованием сдвоенных компараторов, например микросхем типа МАХ 962 фирмы MAXIM. Блок 42 формирования сигналов тактовой и гетеродинных частот может быть реализован с использованием стандартных элементов, например микросхемы типа TEMPUS-LVA фирмы MOTOROLA (опорный генератор), микросхем типа МС13142 фирмы MOTOROLA (ГУН) и микросхем типа LMX2330 фирмы NATIONAL SEMICONDUCTOR (блок ФАПЧ) для реализации управляемых синтезаторов частоты, микросхем типа МС12095, МС12093 фирмы MOTOROLA для реализации делителей частоты.
Вычислитель 4 реализуется как микроЭВМ стандартной конфигурации, содержащая стандартные элементы - процессор, контроллер, оперативное, постоянное, перепрограммируемое постоянное запоминающие устройства, интерфейсы, порты ввода-вывода данных. Функционирование вычислителя 4 осуществляется по стандартным алгоритмам навигационного вычислителя многоканального приемника сигналов СРНС.
Цифровой коррелятор 2 с рассмотренной структурой выполнения каналов 3, т. е. с модулями 6 корреляционной обработки, цифровыми генераторами несущей 7 и кода 8, а также формирователь 5 сигналов меток времени и формирователь 9 дополнительных низкочастотных тактовых сигналов может быть выполнен в виде СБИС (специализированной большой интегральной схемы) с использованием библиотек стандартных элементов, например фирм SAMSUNG ELECTRONICS или SGS TOMSON.
Работу заявляемого приемника СРНС рассмотрим на примере приема и обработки сигналов GPS и ГЛОНАСС, промодулированных кодами стандартной точности (С/А кодами) в диапазоне частот L1, для случая, когда сигналами ГЛОНАСС являются сигналы с литерными частотами "0" - "12" или "-7" - "4", устанавливаемыми в соответствии с [1] .
Заявляемый приемник сигналов СРНС работает следующим образом.
Принятые антенной сигналы GPS и ГЛОНАСС частотного диапазона L1 поступают на сигнальный вход радиочастотного преобразователя 1, т. е. на вход входного блока 38 (фиг. 1 и 4). Сигналы GPS диапазона L1 занимают частотные полосы (1571, 328 - 1579, 512) МГц шириной ΔF = 8,184 МГц (по четыре лепестка в спектре сигнала в обе стороны от несущей для реализации "узкого коррелятора"), а сигналы ГЛОНАСС диапазона L1 занимают частотные полосы (1599, 956 - 1610, 794) МГц шириной ΔF = 10,838 МГц (случай литерных частот "0" - "12") и (1596, 019 - 1606, 294) МГц шириной ΔF = 10,2755 МГц (случай литерных частот "-7" - "4"). Входной блок 38 пропускает на свой выход сигналы GPS и ГЛОНАСС указанных частот, т. е. частоты диапазона (1571, 328 - 1610, 794) МГц. С выхода блока 38 сигналы GPS и ГЛОНАСС поступают на вход блока 39 первого преобразования частоты сигналов, где преобразуются по частоте с помощью смесителя, на опорный вход которого поступает сигнал первой гетеродинной частоты (Fr1), формируемый в блоке 42. При приеме сигналов ГЛОНАСС с литерными частотами "0" - "12" значение первой гетеродинной частоты Fr1(l)= 1412 МГц, при приеме сигналов ГЛОНАСС с литерными частотами "-7" - "4" значение первой гетеродинной частоты Fr1(2)= 1408 МГц. Изменение значений гетеродинных частот, формируемых в блоке 42, осуществляется по управляющему сигналу ("Uyп"), поступающему, например, с вычислителя 4. В результате первого преобразования частоты сигналы GPS занимают полосу частот (159, 328 - 167, 512) МГц в случае литерных частот "0" - "12" и полосу частот (163, 328 - 171, 512) МГц в случае литерных частот "-7" - "4". Сигналы ГЛОНАСС занимают при этом соответственно полосы частот (187, 956 - 198, 794) МГц для первого случая и полосу частот (188, 019 - 198, 294) МГц для второго случая. Преобразованные на первую промежуточную частоту сигналы GPS и ГЛОНАСС поступают на входы первого 40 и второго 41 каналов второго преобразования частоты сигналов, т. е. на входы фильтров 43 и 46 (фиг. 4). Каждый из этих фильтров осуществляет полосовую фильтрацию сигналов соответствующей системы, а именно фильтр 43 - фильтрацию сигналов GPS в диапазоне частот (159, 328 - 171, 512) МГц, а фильтр 46 - фильтрацию сигналов ГЛОНАСС в диапазоне частот (187,956 - 198,794) МГц. С выхода фильтров 43 и 46 сигналы GPS и ГЛОНАСС поступают на сигнальные входы смесителей 44 и 46, где осуществляется второе преобразование частоты. Для второго преобразования частоты сигналов GPS используется сигнал второй гетеродинной частоты (Fr2), формируемый в блоке 42. В первом случае - случае приема литерных частот "0" - "12" - эта частота равна Fr2(l)= 179 МГц, а во втором случае - случае приема литерных частот "-7" - "4") - эта частота равна Fr2(2)= 183 МГц. Для второго преобразования частоты сигналов ГЛОНАСС используется сигнал третьей гетеродинной частоты (Fr3), формируемый в блоке 42, например, путем деления на восемь частоты сигнала первой гетеродинной частоты. Таким образом, в первом случае Fr3(1)= 1/8•Fr1(l)= 176,5 МГц, а во втором случае - Fr3(2)= 1/8•Fr1(2)= 176 МГц. В результате второго преобразования частоты сигналы GPS занимают полосу частот (13,99 - 22,17) МГц для первого случая и полосу частот (10,99 - 19,17) МГц для второго случая, а сигналы ГЛОНАСС занимают полосу частот (11,46 - 22,29) МГц для первого случая и полосу частот (12,02 - 22,29) МГц для второго случая. Затем сигналы GPS и ГЛОНАСС усиливаются с помощью усилителей с регулируемыми коэффициентами усиления, входящих в состав смесителей 44 и 47, после чего подвергаются аналого-цифровому преобразованию в блоках 45 и 48. Аналого-цифровое преобразование может заключаться в двухбитовом квантовании по уровню с помощью соответствующих пороговых устройств - например сдвоенных компараторов типа МАХ 962 фирмы MAXIM. При таком аналого-цифровом преобразовании для сигналов, формируемых блоками 45 и 48, характерным является наличие несущей, которая "снимается" далее в каналах 3 (31, 32, . . . , 3N) цифрового коррелятора 2, а именно в цифровых смесителях 32 и 33 модуля 6 корреляционной обработки (фиг. 3).
С выходов каналов 40 и 41 сигналы GPS и ГЛОНАСС поступают на первые ("GPS") и вторые ("ГЛОНАСС") сигнальные входы каждого из каналов 3 (31, 32, . . . , 3N) цифрового коррелятора 2 (фиг. 1 и 3), т. е. на соответствующие сигнальные входы модулей 6 корреляционной обработки. На тактовые входы каналов 3 (тактовые входы модулей 6, цифровых генераторов несущей 7 и кода 8) поступает сигнал основной тактовой частоты Fт. Эта тактовая частота определяет частоту временной дискретизации при осуществлении операций цифровой корреляционной обработки сигналов.
Формирование сигнала тактовой частоты Fт осуществляется в блоке 42 радиочастотного преобразователя 1, например из сигнала третьей гетеродинной частоты путем деления этой частоты на восемь (Fт= Fr3/8≈22 МГц) с последующим формированием сигнала типа "меандр". При этом значение тактовой частоты Fт и значение полос частот преобразуемых сигналов GPS и ГЛОНАСС находятся между собой в примерном соотношении 2: 1, что позволяет осуществить цифровую корреляционную обработку сигналов без потерь навигационной информации.
В каналах 3 (31, 32, . . . , 3N) цифрового коррелятора 2 осуществляется цифровая корреляционная обработка сигналов N видимых спутников систем GPS и ГЛОНАСС в сочетании, определяемом командами, поступающими с вычислителя 4. В процессе корреляционной обработки определяется временное положение пиков корреляционных функций сигналов соответствующих N спутников, определяются радионавигационные параметры, используемые в расчетах местоположения. При этом отсчеты квазидальности, фазы несущей и числа циклов несущей производятся в соответствии с измерительными стробами (Fи), поступающими с выхода формирователя 5 сигналов меток времени. Частота измерительных стробов (1 - 10 Гц) устанавливается сигналом, поступающим на управляющий вход формирователя 5 от вычислителя 4. Корреляционная обработка сигналов в канале 3 цифрового коррелятора 2 осуществляется с помощью модуля 6 корреляционной обработки под воздействием опорных сигналов, формируемых цифровыми генераторами несущей 7 и кода 8. Корреляционная обработка сигналов осуществляется под управлением вычислителя 4. При этом выполняются следующие операции.
Коммутатор 24 по команде, формируемой регистром 29 управления под воздействием управляющих сигналов, поступающих из вычислителя 4, выбирает, какой из двух сигналов (GPS или ГЛОНАСС) будет обрабатываться в данном модуле 6. Цифровой генератор несущей 7 вырабатывает в цифровом виде значения фазы несущей частоты опорного сигнала, используемого при осуществлении процессов квадратурного "перемножения" с входным сигналом в цифровых смесителях 32 и 33. Цифровые смесители 32 и 33 обеспечивают выделение сигнала данной литеры (ГЛОНАСС) или сигнала данного спутника (GPS) и перенос спектра этого сигнала на основную полосу частот (на нулевую частоту). Тем самым в результате перемножения сигналов в цифровых смесителях 32 и 33 осуществляются "снятие" несущей синфазной и квадратурной составляющих сигнала и перенос спектра сигнала на нулевую частоту.
Цифровой генератор несущей 7 управляется сигналами вычислителя 4, в частности от вычислителя 4 поступают данные кода несущей частоты сигнала. На основе этих данных накапливающий сумматор 12 (фиг. 2) формирует выходной сигнал цифрового генератора несущей 7 в виде текущих значений фазы частоты опорного сигнала. Кроме этого, с помощью блока 13 формирования отсчетов в генераторе несущей 7 формируются данные отсчета фазы несущей и данные отсчета числа циклов (периодов) несущей, используемые вычислителем 4 при осуществлении процесса слежения за частотой и фазой несущей входного сигнала. Работа накапливающего сумматора 12 цифрового генератора несущей 7 осуществляется с частотами дискретизации, определяемыми основной тактовой частотой Fт и первой тактовой частотой F1, а формирование отсчетов в блоке 13 формирования отсчетов - с частотой измерительных стробов Fи. Сформированные цифровым генератором несущей 7 опорные сигналы (в виде текущих значений фазы) поступают на опорные входы цифровых смесителей 32 и 33. В цифровых смесителях 32 и 33 с помощью преобразователей кодов, реализующих "таблицы синусов - косинусов", значения фазы опорного сигнала преобразуются в соответствующие значения амплитуды, используемые в цифровых смесителях 32, 33 при цифровом квадратурном "перемножении" обрабатываемого и опорного сигналов.
После "снятия" несущей синфазной и квадратурной составляющих обрабатываемого сигнала и переноса спектра сигнала на нулевую частоту цифровые демодуляторы 34-37 осуществляют корреляционное сравнение обрабатываемого сигнала с опорными С/А кодами, формируемыми с помощью программируемой линии задержки 31 и генератора 30 опорного С/А кода.
Опорная тактовая частота для генератора 30 опорного С/А кода (1,023 МГц для GPS и 0,511 МГц для ГЛОНАСС) определяется опорным сигналом, формируемым цифровым генератором кода 8. В цифровом генераторе кода 8 формирование выходного опорного сигнала осуществляется с помощью его накапливающего сумматора 12, при этом выходной сигнал снимается, например, со старшего разряда выходного регистра фазы 17. Кроме этого, в цифровом генераторе кода 8 связанный с сумматором 12 блок 13 формирования отсчетов формирует данные отсчета долей символа кода, которые в качестве сигнала обратной связи поступают в вычислитель 4. Значения формируемой в генераторе 8 опорной тактовой частоты С/А кода поступают в накапливающий сумматор 12 с вычислителя 4. Работа накапливающего сумматора 12 цифрового генератора кода 8 осуществляется с частотами дискретизации, определяемыми основной тактовой частотой Fт и второй тактовой частотой F2, а формирование отсчетов долей символа в блоке 13 формирования отсчетов - с частотой измерительных стробов Fи.
Опираясь на выходной сигнал цифрового генератора кода 8, устанавливающий тактовую частоту С/А кода, генератор 30 опорного С/А кода генерирует опорный С/А код для обработки сигнала соответствующего спутника соответствующей системы. Генерируемый генератором 30 опорный С/А код уникален для каждого из спутников GPS, использующих кодовое разделение сигналов, и одинаков для всех спутников ГЛОНАСС, использующих частотное разделение сигналов. Формирование определенного вида кода, то есть определенного вида псевдослучайной кодовой последовательности, осуществляется в генераторе 30 с помощью входящего в его состав генератора псевдослучайного кода, управляемого вычислителем 4 (не показан). Сигналы обратной связи для вычислителя 4 (отсчеты числа символов кода и числа миллисекундных эпох) формируются при этом с помощью входящих в состав генератора 30 счетчика числа символов кода и регистра числа символов кода, а также счетчика числа миллисекундных эпох и регистра числа миллисекундных эпох (не показаны). Съем информации с регистров числа символов кода и числа миллисекундных эпох осуществляется с частотой измерительных стробов Fи.
Сформированный генератором 30 опорный С/А код поступает на программируемую линию задержки 31, которая формирует на своих выходах точную "Р" (пунктуальную) и разностную "E-L" (раннюю-минус-позднюю) копию опорного С/А кода. Точная "Р" копия опорного С/А кода подается на вторые входы цифровых демодуляторов 34 и 37, а разностная "E-L" - на вторые входы цифровых демодуляторов 35 и 36. Работа программируемой линии задержки 31 осуществляется под действием управляющих сигналов, формируемых регистром 29 управления, управляемого вычислителем 4. При этом осуществляется изменение интервала между ранней и поздней копиями С/А кода от 0,1 до 1 длительности символа С/А кода, тем самым формируется "узкий дискриминатор" ("узкий коррелятор") в системе слежения за кодом [8 - 10] .
Результаты корреляционного сравнения, осуществляемого в цифровых демодуляторах 34-37, накапливаются в блоках 25-28 накопления на интервале времени, равном длительности эпохи кода (1 мс), а затем считываются вычислителем 4 и используются для замыкания петель слежения за кодом и несущей обрабатываемого сигнала.
В рассмотренном общем виде работа заявляемого приемника сигналов СРНС аналогична работе приемника-прототипа. Отличие заключается в особенностях формирования опорных сигналов цифровыми генераторами несущей 7 и кода 8. Эти особенности заключаются в следующем.
В отличие от приемника-прототипа накапливающий сумматор 12 каждого из генераторов 7 и 8 содержит высокочастотную и низкочастотную части - соответственно
высокочастотный 14 и низкочастотный 15 накопительные модули, при этом формируемые накапливающим сумматором 12 текущие значения фазы выходного сигнала представляют собой сумму значений фаз, формируемых модулями 14 и 15. Высокочастотные накопительные модули 14 обоих генераторов 7 и 8 работают с частотой дискретизации, определяемой основной тактовой частотой Fт, низкочастотный накопительный модуль 15 цифрового генератора несущей 7 работает с частотой дискретизации, определяемой первой дополнительной тактовой частотой F1, а низкочастотный накопительный модуль 15 цифрового генератора кода 8 работает с частотой дискретизации, определяемой второй дополнительной тактовой частотой F2.
Работа накапливающих сумматоров 12 в цифровых генераторах несущей 7 и кода 8 осуществляется по одному и тому же алгоритму, отличие заключается в разрядностях накопительных модулей 14 и 15, частотах дискретизации, на которых работают низкочастотные накопительные модули 15, а также в частотах формируемых выходных сигналов.
В качестве примера рассмотрим работу накапливающего сумматора 12 цифрового генератора несущей 7.
На первый управляющий вход накапливающего сумматора 12 цифрового генератора несущей 7, т. е. на информационный вход первого регистра кода частоты 18 высокочастотного накопительного модуля 14, поступает K1-разрядное число N1, пропорциональное заданному приращению ΔϕВЧ текущей фазы, формируемой в каждом такте сигнала дискретизации частоты Fт. Число N1 устанавливается вычислителем 4, например, исходя из условий функционирования "схемы слежения за несущей". Число N1 записывается в регистре 18 по соответствующему сигналу записи, формируемому вычислителем 4. С выхода регистра 18 число N1 поступает на первый вход первого комбинационного сумматора 19. На второй вход комбинационного сумматора 19 с частотой Fт поступает K1-разрядное число, определяющее значение текущей фазы, накопленное в первом регистре фазы 20 к данному такту. Результат суммирования этих чисел отсылается обратно в регистр фазы 20. Таким образом, на выходе высокочастотного накопительного модуля 14 с частотой Fт формируются текущие значения фазы ϕВЧ, что геометрически интерпретируется (в системе координат "фаза-время") ступенчатой функцией, представленной на фиг. 5 кривой "I". Наклон кривой "I" определяет скорость приращения фазы и, следовательно, частоту fсинт, вч сигнала, синтезируемого высокочастотным накопительным модулем 14. Этот наклон, а значит и частота fсинт, вч синтезируемого сигнала, может оперативно изменяться путем изменения числа N1. Значение фазы ϕВЧ, снимаемое с частотой Fт с выхода регистра фазы 20 (фиг. 5, кривая "I"), поступает на первый вход выходного комбинационного сумматора 16.
На второй управляющий вход накапливающего сумматора 12 цифрового генератора несущей 7, т. е. на информационный вход второго регистра кода частоты 21 низкочастотного накопительного модуля 15, поступает K2-разрядное число N2, пропорциональное заданному приращению ΔϕНЧ текущей фазы, формируемой в каждом такте сигнала дискретизации частоты F1. Число N2 записывается в регистре 21 по соответствующему сигналу записи, формируемому вычислителем 4. С выхода регистра 21 число N2 поступает на первый вход второго комбинационного сумматора 22. На второй вход этого комбинационного сумматора 22 с частотой F1 поступает K2-разрядное число, определяющее значение текущей фазы, накопленное во втором регистре фазы 23 к данному такту. Результат суммирования этих чисел отсылается обратно в регистр фазы 23. Таким образом, на выходе низкочастотного накопительного модуля 15 с частотой F1 формируются текущие значения фазы ϕНЧ, что геометрически интерпретируется (в системе координат "фаза-время") ступенчатой функцией, представленной на фиг. 5 кривой "II". Наклон кривой "II" определяет скорость приращения фазы и, следовательно, частоту fсинт, нч сигнала, синтезируемого низкочастотным накопительным модулем 15. Этот наклон, а значит и частота fсинт, нч синтезируемого сигнала, могут изменяться путем изменения числа N2.
Значение фазы ϕНЧ (с точностью до K1 старших разрядов), снимаемое с выхода K1 старших разрядов регистра фазы 23 низкочастотного накопительного модуля 15 (фиг. 5, кривая "II"), поступает с частотой F1 на второй вход выходного комбинационного сумматора 16, где складывается со значением фазы ϕВЧ, поступающим с частотой Fт с выхода регистра фазы 26 высокочастотного накопительного модуля 14 (фиг. 5, ступенчатая кривая "I").
Результат суммирования фаз ϕВЧ+ ϕНЧ = ϕСИНТ. представлен на фиг. 5 ступенчатой кривой "III". Этот результат записывается в выходной регистр фазы 17, откуда с частотой Fт поступает на выход накапливающего сумматора 12. Наклон ступенчатой кривой "III" определяет скорость приращения суммарной фазы ϕСИНТ. и, следовательно, частоту fсинт выходного сигнала, синтезируемого накапливающим сумматором 12. Наклон этой кривой, а значит и синтезируемая частота fсинт, в общем случае может устанавливаться за счет любых ее составляющих - кривых "I" и/или "II" (частот fсинт, вч и/или fсинт. нч). Практически, различие в синтезируемых частотах рассматриваемых цифровых генераторов разных каналов 3 цифрового коррелятора 2, обусловленное разными литерами у сигналов ГЛОНАСС и разными тактовыми частотами С/А кодов ГЛОНАСС и GPS, обеспечивается различием в низкочастотных составляющих fсинт, нч.
Поскольку формирование выходных значений фазы ϕСИНТ,нч в накапливающем сумматоре 12 осуществляется путем суммирования двух составляющих (высокочастотной ϕВЧ и низкочастотной ϕНЧ), то имеет место объективное ограничение, накладываемое на величину каждой из этих составляющих. Суть этого ограничения состоит в том, что для обеспечения однозначности в пределах фазовых циклов формируемых значений фазы ϕСИНТ. приращение суммарной фазы на каждом такте дискретизации не должно быть меньше нуля и больше 180o (π). С учетом этого ограничения выбираются конкретные соотношения между разрядностями высокочастотного 14 и низкочастотного 15 накопительных модулей и величинами записываемых в них чисел, а также устанавливается определенная цикличность работы (периоды переполнения) модулей 14, 15.
Анализируя характеристику накопления фазы в накапливающем сумматоре 12 (фиг. 5, ступенчатая кривая "III") и сравнивая ее с эталонной характеристикой (фиг. 5, прямая "IV") видно, что формируемые накапливающим сумматором 12 значения суммарной фазы ϕСИНТ., снимаемые с выходного регистра фазы 17, совпадают с эталонными значениями в моменты, соответствующие тактам сигнала дискретизации частоты Fт. В остальные моменты значения суммарной фазы отличаются от эталонных, причем это отличие носит систематический характер и во времени определяется фазой тактовой частоты F1 y цифрового генератора несущей 7 и F2 у цифрового генератора кода 8. Эта систематическая погрешность, при необходимости, вычисляется вычислителем 4 и учитывается в виде корректирующих поправок при работе цифровых следящих систем корреляционной обработки сигналов. В частности, учет систематической погрешности для цифрового генератора несущей 7 производится при осуществлении абсолютных фазовых измерений, например в моменты измерения псевдодальности и доплеровского сдвига частоты по фазе несущей. В случаях, когда абсолютные фазовые измерения не производятся, сформированные цифровым генератором несущей 7 значения суммарной фазы применяются без коррекции систематической погрешности.
В заявляемом приемнике для обеспечения возможности учета этой систематической погрешности используется регистр 11 отсчета фазы, входящий в состав формирователя 9 дополнительных низкочастотных тактовых сигналов (см. фиг. 1). Регистр 11 фиксирует на моменты поступления измерительных стробов Fи значения счетчиков, входящих в состав делителя частоты 10. Эти значения определяют фазы ϕ1 и ϕ2 формируемых делителем 10 дополнительных тактовых частот F1 и F2. Эти значения считываются вычислителем 4 и используются для вычисления поправок в отсчеты фаз низкочастотных составляющих сигналов, синтезируемых цифровыми генераторами несущей 7 или кода 8, на сдвиг момента измерений относительно момента последней коррекции по формуле
где Δ- значение поправки (в долях фазового цикла);
fcинт. нч - частота, синтезируемая низкочастотным накопительным модулем 15 соответствующего цифрового генератора 7 (8) соответствующего канала 3 цифрового коррелятора 2;
Fт - тактовая частота (частота дискретизации);
k1(2) - отношение частоты Fт к частоте F1(F2);
ϕ1(2)- фаза опорной частоты F1(F2) в момент измерения (значение счетчиков делителя частоты 10, формирующих соответствующую опорную частоту F1(F2) в момент измерения).
Наличие технических средств, позволяющих определять и учитывать систематическую погрешность, связанную с особенностями работы двухчастотных накапливающих сумматоров 12 цифровых генераторов 7 и 8, дает возможность в заявляемом приемнике осуществлять навигационные измерения с требуемой точностью. При этом в отличие от приемника-прототипа, обеспечивается уменьшение потребляемой мощности.
Уменьшение потребляемой мощности, достигаемое за счет нового (двухчастотного) выполнения цифровых генераторов несущей 7 и кода 8, связано с тем, что высокочастотный накопительный модуль 14 накапливающего сумматора 12 является низкоразрядным, а высокоразрядный накопительный модуль 15 - низкочастотным. Такая комбинация высокочастотного низкоразрядного и низкочастотного высокоразрядного накопительных модулей обеспечивает уменьшение энергопотребления по сравнению с традиционным решением, основанным на применении в цифровых генераторах несущей и кода высокочастотных и одновременно высокоразрядных накопительных сумматоров.
Оценку выигрыша по потребляемой мощности наглядно можно проиллюстрировать на примере цифрового генератора кода 8.
Для целей оценки примем, что цифровой генератор кода 8 должен формировать частоту в пять раз большую, чем частота С/А кода GPS (1,023 МГц), т. е. частоту fсинт= 5•1,023 МГц= 5,115 МГц= (5+0,115) МГц, при этом частота дискретизации Fт≈20 МГц, а дискрет установки частоты - Δf = 1 Гц.
Для этих условий разрядность К цифрового генератора кода традиционной структуры, определяемая из формулы Δf = Fт/2к, составляет величину К= 25, а цифровой генератор кода 8 заявляемого приемника имеет следующие параметры: высокочастотный накопительный модуль 14 выполняется двухразрядным (К3= 2), работает с частотой дискретизации Fт≈20 МГц и синтезирует частоту fсинт. вч= 5МГц; низкочастотный накопительный модуль 15 выполняется 23-разрядным (К4= 23), работает с частой дискретизации F2= Fт/20≈1 МГц и синтезирует частоту fсинт. нч= 0,115 МГц.
Приближенную оценку энергопотребления Р цифрового генератора с накапливающим сумматором можно осуществить, например, с помощью эмпирической формулы
P= F•Pg•Kg,
где F - частота дискретизации, МГц;
Pg - энергопотребление на один элемент (зависит от элементной базы);
Kg - число разрядов.
В условиях одинаковой элементной базы, например при использовании одинаковых D-триггеров, энергопотребление Pg на один элемент в цифровом генераторе традиционной структуры и в двухчастотном цифровом генераторе заявляемого приемника можно считать равным и не учитывать при проводимой сравнительной оценке.
С учетом этого допущения потребление Р0 цифрового генератора кода традиционной структуры можно оценить как
P0= F•Kg= Fт•(Ks0+Kr0),
где Ks0 - разрядность комбинационного сумматора (К= 25);
Кr0 - разрядность регистра фазы (К= 25).
Потребление P1 двухчастотного генератора кода можно оценить как
p1= Fт•(Ks1+Kr1)•2+F2•(Ks2+Kr2),
где Ks1 - разрядность высокочастотных комбинационных сумматоров 16, 19 (К3);
Кr1 - разрядность высокочастотных регистров фазы 17, 20 (К3);
Ks2 - разрядность низкочастотного комбинационного сумматора 22 (К4);
Kr2 - разрядность низкочастотного регистра фазы 23 (К4).
Учитывая, что потребление, приходящееся на один разряд комбинационного сумматора и один разряд регистра фазы, примерно одинаково [12] , потребление Р0 цифрового генератора кода традиционной структуры и потребление P1 двухчастотного цифрового генератора кода заявляемого приемника можно записать как
Р0= Fт•К•2≈20•25•2≈1000;
P1= (Fт•К3•4) + (F2•К4•2)≈(20•2•4) + (1•23•2)≈206.
Сравнивая значения Р0 и P1, видно, что выигрыш по потребляемой мощности только в отношении одного цифрового генератора кода 8 в условиях данного примера составляет более 4,8 раз. Реально выигрыш по потребляемой мощности выше, поскольку в генераторе традиционной структуры высокочастотный высокоразрядный комбинационный сумматор должен содержать дополнительные цепи параллельных переносов, не учитываемые в рассмотренном примере, что приводит к увеличению объема данного сумматора и, соответственно, потребляемой им мощности в несколько раз. В комбинационных сумматорах заявляемого приемника таких цепей нет, поскольку комбинационные сумматоры 19, 16 являются низкоразрядными, а комбинационный сумматор 22 работает на достаточно низкой частоте, которая позволяет применение сумматоров с последовательным переносом.
Выигрыш по потребляемой мощности в отношении генератора несущей 7, оцененный по приведенной выше методике, составляет не менее 2,4 раза.
Учитывая, что цифровые генераторы несущей и кода содержатся во всех каналах N канального цифрового коррелятора 2, а число каналов может достигать 12 - 24, общий выигрыш по энергопотреблению в заявляемом приемнике существенен.
Таким образом, из рассмотренного видно, что заявляемый приемник сигналов СРНС технически осуществим, промышленно реализуем и решает поставленную техническую задачу по снижению уровня энергопотребления. При этом реализуемые положительные особенности заявляемого приемника сигналов СРНС обуславливают перспективы по его широкому использованию, особенно в портативной радионавигационной аппаратуре с батарейным питанием.
Источники информации
1. "Глобальная Навигационная Спутниковая Система - ГЛОНАСС. Интерфейсный контрольный документ. КНИЦ ВКС Россия", 1995.
2. "Global Position System. Standard Positioning Service. Signal Specification. " США, 1993.
3. Сетевые спутниковые радионавигационные системы / В. С. Шебшаевич, П. П. Дмитриев, Н. В. Иванцевич и др. // М. , Радио и связь, 1993.
4. Riley S. , Howard N. , Aardoom E. , Daly P. , Silvestrin P. "A Combined GPS/GLONASS High Precision Receiver for Spase Applications" / Proc. jf ION GPS-95, Palm Springs, CA, US, Sept. 12-15, 1995, р. 835-844.
5. Цифровые радиоприемные системы: Справочник / М. И. Жодзишский, Р. Б. Мазепа, Е. П. Овсянников и др. / Под ред. М. И. Жодзишского, М. , Радио и связь, 1990.
6. Бортовые устройства спутниковой радионавигации / И. В. Кудрявцев, И. Н. Мищенко, А. И. Волынкин и др. ; под ред. B. C. Шебшаевича, М. , Транспорт, 1988.
7. Патент РФ 2146378 (С1), кл. G 01 S 5/14, опубл. 10.04.2000.
8. A. J. Van Dierendonck. , Pat. Fenton and Tom Ford. Theory and Performance of Narrow Correlator Spacing in a GPS Reciever. Navigation: Jornal of The Institute of Navigation, Vol. 39, N 3, 1982.
9. Патент США 5390207, кл. G 01 S 5/02, H 04 В 7/185, опубл. 14.02.95. (Fenton, A. J. Van Dierendonck, "Pseudorandom noise ranging receiver which compensates for multipath distortion by dynamically adjusting the time delay spacing between early and late correlators").
10. Патент США 5495499, кл. H 04 L 9/00, опубл. 27.02.96. (Fenton, A. J. Van Dierendonck, "Pseudorandom noise ranging receiver which compensates for multipath distortion by dynamically adjusting the time delay spacing between early and late correlators").
11. Г. И. Пухальский, Т. Я. Новосельцева. Цифровые устройства. - Политехника. Санкт-Петербург, 1996.
12. Каталог элементов фирмы "Самсунг" - "STD 80/STDM80 0.5 m 5V/3/3V Standard Cell Library Data Book, 1996, Samsung Electronics Co. , Ltd. ".
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ГЕНЕРАТОР ДЛЯ ЦИФРОВЫХ СЛЕДЯЩИХ СИСТЕМ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ | 2000 |
|
RU2180125C1 |
| БЛОК ПРИЕМНИКА СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2190941C1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 2001 |
|
RU2188522C1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 2001 |
|
RU2194375C1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 2001 |
|
RU2199839C1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 2001 |
|
RU2192108C1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 2000 |
|
RU2175821C1 |
| БАЗОВЫЙ КОНСТРУКТИВНЫЙ БЛОК ДЛЯ РАДИОЭЛЕКТРОННЫХ ПРИБОРОВ | 2000 |
|
RU2173037C1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 2000 |
|
RU2172080C1 |
| РАДИОЭЛЕКТРОННЫЙ БЛОК | 2000 |
|
RU2173036C1 |

Изобретение относится к радионавигации, конкретно к приемникам сигналов спутниковых радионавигационных систем GPS и ГЛОНАСС частотного диапазона L1. Приемник содержит радиочастотный преобразователь, N канальный цифровой коррелятор, вычислитель, формирователь сигналов меток времени, каждый из каналов цифрового коррелятора содержит модуль корреляционной обработки, цифровой генератор несущей и цифровой генератор кода. Каждый из цифровых генераторов несущей и кода содержит накапливающий сумматор и блок формирования отсчетов. Каждый из накапливающих сумматоров каждого из цифровых генераторов несущей и кода выполнен в виде высокочастотного и низкочастотного накопительных модулей, а также содержит соединенные последовательно выходной комбинационный сумматор и выходной регистр фазы. При этом высокочастотный накопительный модуль содержит последовательно соединенные первый регистр кода частоты, первый комбинационный сумматор и первый регистр фазы, выход которого подключен к второму входу первого комбинационного сумматора и к первому входу выходного комбинационного сумматора. Низкочастотный накопительный модуль содержит последовательно соединенные второй регистр кода частоты, второй комбинационный сумматор и второй регистр фазы, выход которого подключен к второму входу второго комбинационного сумматора, а выход соответствующих старших разрядов - к второму входу выходного комбинационного сумматора. Тактовый вход выходного регистра фазы и тактовый вход первого регистра фазы высокочастотного накопительного модуля образуют тактовый вход накапливающего сумматора - тактовый вход соответствующего цифрового генератора. Тактовый вход второго регистра фазы низкочастотного накопительного модуля образует дополнительный вход цифрового генератора. Информационные входы регистров кода частоты высокочастотного и низкочастотного накопительных модулей образуют управляющие входы накапливающего сумматора. Выходы соответствующих разрядов выходного регистра фазы образуют выход формируемых опорных сигналов цифрового генератора. В приемник также введен формирователь дополнительных низкочастотных тактовых сигналов для цифрового генератора несущей и цифрового генератора кода, выполненный в виде делителя частоты и связанного с ним регистра отсчета фазы, причем первый и второй выходы низкочастотных тактовых сигналов делителя частоты соединены соответственно с дополнительными входами цифрового генератора несущей и цифрового генератора кода каждого из каналов N канального коррелятора. Достигаемым техническим результатом является снижение потребляемой мощности. 5 ил.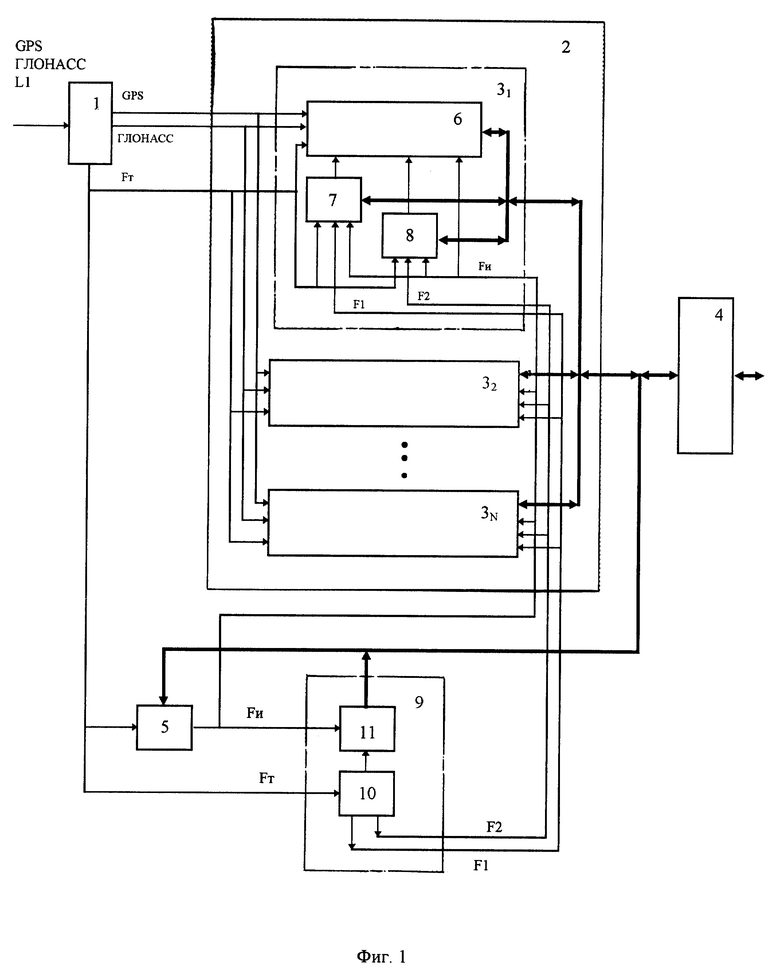
Приемник сигналов спутниковых радионавигационных систем, содержащий радиочастотный преобразователь, вход которого образует сигнальный вход приемника, N канальный цифровой коррелятор, сигнальные и тактовые входы каждого из каналов которого соединены с соответствующими выходами радиочастотного преобразователя, вычислитель, а также формирователь сигналов меток времени, управляющий вход которого связан шиной обмена данными с вычислителем, тактовый вход - с тактовым выходом радиочастотного преобразователя, а выход измерительных стробов - с входами измерительных стробов каждого из каналов N канального цифрового коррелятора, причем каждый из каналов N канального цифрового коррелятора содержит связанные с вычислителем шиной обмена данными модуль корреляционной обработки, цифровой генератор несущей и цифровой генератора кода, а каждый из указанных цифровых генераторов содержит связанные с вычислителем шиной обмена данными накапливающий сумматор и блок формирования отсчетов, информационный вход которого подключен к выходу данных накапливающего сумматора, при этом выходы опорных сигналов указанных цифровых генераторов, образованные соответствующими выходами их накапливающих сумматоров, соединены с опорными входами модуля корреляционной обработки, тактовые входы указанных цифровых генераторов, образованные тактовыми входами их накапливающих сумматоров, и входы измерительных стробов, образованные входами измерительных стробов их блоков формирования отсчетов, соединены, соответственно, с тактовым входом и входом измерительных стробов модуля корреляционной обработки, тактовый вход, вход измерительных стробов и сигнальные входы которого образуют соответствующие входы канала N канального цифрового коррелятора, отличающийся тем, что в приемник введен формирователь дополнительных низкочастотных тактовых сигналов для цифрового генератора несущей и цифрового генератора кода, выполненный в виде делителя частоты и связанного с ним регистра отсчета фазы, причем тактовый вход делителя частоты соединен с тактовым выходом радиочастотного преобразователя, вход измерительных стробов регистра отсчета фазы соединен с выходом измерительных стробов формирователя сигналов меток времени, выход регистра отсчета фазы связан шиной обмена данными с вычислителем, а первый и второй выходы низкочастотных тактовых сигналов делителя частоты соединены соответственно с дополнительными входами цифрового генератора несущей и цифрового генератора кода каждого из каналов N канального коррелятора, при этом в каждом из указанных цифровых генераторов накапливающий сумматор выполнен в виде высокочастотного и низкочастотного накопительных модулей, а также содержит соединенные последовательно выходной комбинационный сумматор и выходной регистр фазы, причем высокочастотный накопительный модуль содержит последовательно соединенные первый регистр кода частоты, первый комбинационный сумматор и первый регистр фазы, выход которого подключен к второму входу первого комбинационного сумматора и к первому входу выходного комбинационного сумматора, низкочастотный накопительный модуль содержит последовательно соединенные второй регистр кода частоты, второй комбинационный сумматор и второй регистр фазы, выход которого подключен к второму входу второго комбинационного сумматора, а выход соответствующих старших разрядов - к второму входу выходного комбинационного сумматора, тактовый вход выходного регистра фазы и соединенный с ним тактовый вход первого регистра фазы высокочастотного накопительного модуля образуют тактовый вход накапливающего сумматора - тактовый вход цифрового генератора, тактовый вход второго регистра фазы низкочастотного накопительного модуля образует дополнительный вход цифрового генератора, информационные входы первого и второго регистров кода частоты высокочастотного и низкочастотного накопительных модулей образуют соответственно первый и второй управляющие входы накапливающего сумматора, связанные шиной обмена данными с вычислителем, выходы разрядов выходного регистра фазы и выходы соответствующих младших разрядов второго регистра фазы низкочастотного накопительного модуля образуют выход данных накапливающего сумматора, связанный через блок формирования отсчетов с вычислителем, а выходы соответствующих разрядов выходного регистра фазы образуют выход опорных сигналов цифрового генератора, соединенный с соответствующим опорным входом модуля корреляционной обработки канала N канального цифрового коррелятора.
| ИНТЕГРИРОВАННЫЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1999 |
|
RU2146378C1 |
| US 5099245 А, 24.03.1992 | |||
| Способ контроля качества уборкиКОРНЕКлубНЕплОдОВ | 1979 |
|
SU837341A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |

