Изобретение относится к авиационной технике, в частности беспилотным летательным аппаратам, предназначенным для перехвата и поражения воздушной мишени.
Возросшее число инцидентов с летающими гражданскими дронами, а также возможность их применения для убийств, терактов и других противоправных действий обуславливает востребованность мер противодействия данному виду беспилотных летательных аппаратов. Проблемой большинства современных решений борьбы с дронами является их высокая стоимость, а также возникновение опасности для людей и объектов, находящихся в точках, куда могут сваливаться потерявшие управление или выведенных из строя беспилотники или их части.
В качестве мер противодействия незаконно запущенным или находящимся на запретных для полетов территориях дронах являются беспилотные летательные аппараты - перехватчики, оснащенные более мощными двигателями, с более защищенным корпусом и устройствами для разрушения других дронов, которые могут автоматически наводиться, например, по шуму двигателей преследуемого дрона или по его изображению в системе "компьютерного зрения" дрона-перехватчика.
Известен беспилотный летательный аппарат (далее - БЛА), выполненный в виде свободно несущего моноплана, содержащий фюзеляж, трапециевидное крыло с размещенными на нем двигателями, два киля, снабженные поворотными рулями направления, и размещенную в фюзеляже полезную нагрузку. (Патент РФ №42502, опубл. 2004 г.)
В качестве полезной нагрузки на данном БЛА могут быть размещены телевизионная аппаратура наблюдения, приемно-передающий блок, приемо-передающая антенна, пилотажно-навигационная система и система электроснабжения. Вместе с тем, на данном БЛА не возможно разместить вооружение, например, стрелковый комплекс, для уничтожения воздушных мишеней, таких как дроны, и, следовательно, невозможно использовать данный БЛА в качестве перехватчика. Более того, данный БЛА сам может быть использован в качестве воздушной мишени.
Одной из основных причин невозможности размещения стрелкового комплекса на БЛА является высокое влияние «отдачи» стрелкового вооружения на характеристики траектории полета БЛА, приводящие к потере его управляемости и невозможности совершения дальнейшего полета в соответствии с поставленными перед ним задачами.
Задачей, на решение которой направлено заявленное изобретение, является создание беспилотного летательного аппарата - перехватчика многоразового использования, эффективно поражающего посредством стрелкового оружия воздушные мишени, при одновременном обеспечении требуемых характеристик его полета.
Технический результат достигается тем, что беспилотный летательный аппарат -перехватчик, выполненный в виде свободно несущего моноплана, содержащий фюзеляж, трапециевидное крыло с размещенными на нем двумя винтовыми двигателями, два киля, снабженные поворотными рулями направления, и размещенную в фюзеляже полезную нагрузку, представляет собой летательный аппарат вертикального взлета и посадки, выполненный по аэродинамической схеме «утка» с закрепленным на фюзеляже передним цельно-поворотным горизонтальным оперением, причем фюзеляж выполнен в виде ферменной конструкции, интегрированной с лонжероном крыла, полезная нагрузка представляет собой стрелковый комплекс, размещенный в фюзеляже вдоль оси, проходящей через центр масс БЛА-П, винтовые двигатели выполнены с тянущими воздушными винтами, а кили расположены на крыльях симметрично относительно продольной оси летательного аппарата в зоне максимального обдува воздушными винтами, причем каждый киль интегрирован в единую конструкцию с взлетно-посадочной опорой, выполненной в виде пространственной фермы с отклоненными друг от друга боковыми стержнями, между которыми размещен киль.
Предлагаемая концепция БЛА-П вертикального взлета и посадки, обеспечивает мобильность старта и универсальность его базирования, а так же снимает проблемы, связанные с созданием стартовых устройств.
Выполнение БЛА-П по аэродинамической схеме «утка» с закрепленным на фюзеляже передним цельно-поворотным горизонтальным оперением обеспечивает БЛА-П хорошую маневренность и управляемость.
Выбор аэродинамической схемы БЛА-П с передним расположением горизонтального оперения (ПГО) продиктован необходимостью повышения аэродинамического совершенства на основных этапах целевого применения БЛА-П, путем снижения потерь на продольную балансировку, а так же «удобством» размещения средств обнаружения и стрелкового комплекса.
Размещение вооружения внутри фюзеляжа вдоль оси, проходящей через центр масс летательного аппарата, позволяет практически минимизировать моментные возмущения, действующие на БЛА-П от силы отдачи оружия, исключая, тем самым, изменение характеристик траектории полета БЛА-П.
Выполнение фюзеляжа в виде ферменной конструкции позволяет произвести в нем установку стандартного стрелкового оружия без каких-либо его специальных конструктивных изменений и дополнительных средств крепления, вдоль оси, проходящей через центр масс летательного аппарата.
Оснащение БЛА-П двумя тянущими, а не толкающими воздушными винтами обеспечивает балансировку БЛА-П на околонулевых скоростях полета, для которой необходимо, чтобы рулевые поверхности (элероны, элевоны, руль высоты, руль направления) находились в поле скоростей потока воздуха, отбрасываемого воздушным винтом. Расположение винтов на крыле определяется удобством размещения вооружения.
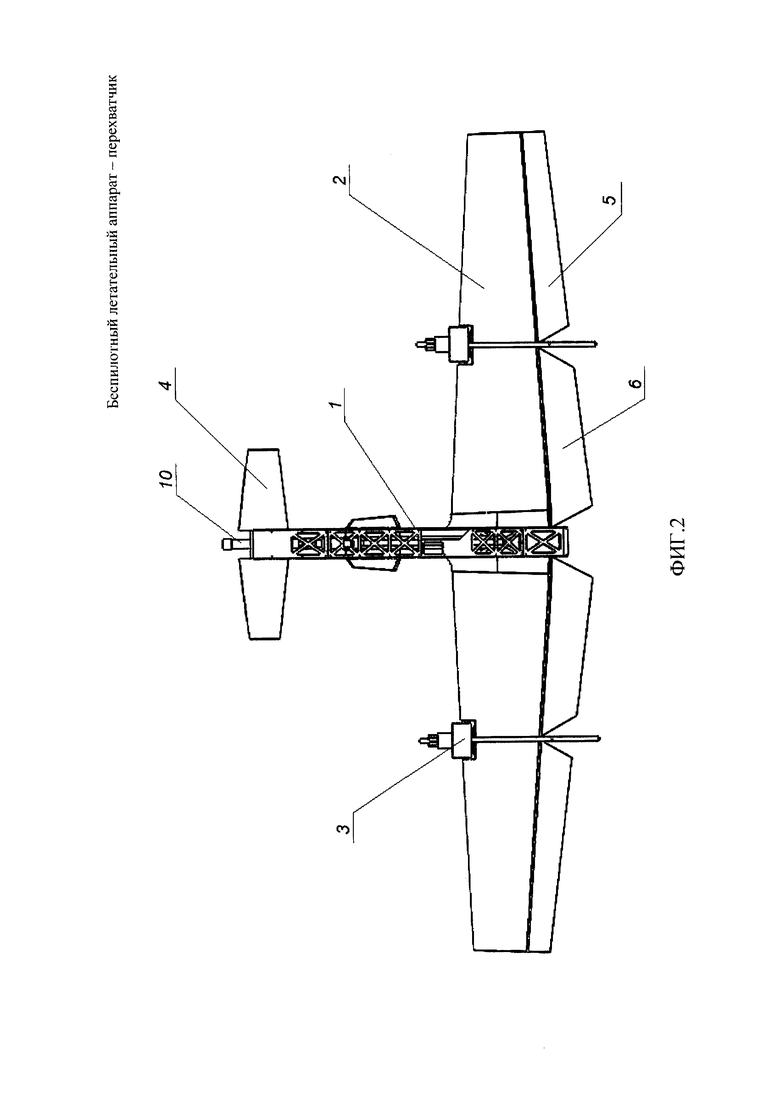
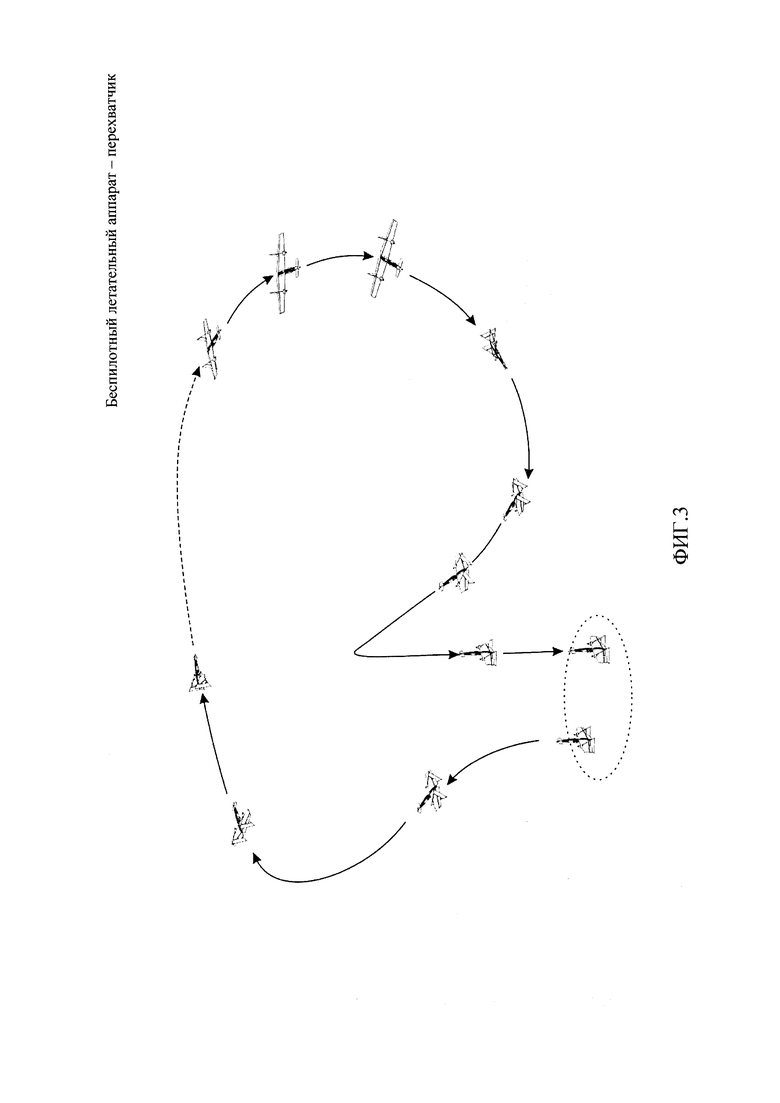
На фиг. 1 представлен общий вид БЛА-П, на фиг. 2 - вид в плане на БЛА-П, на фиг. 3 представлена схема движения БЛА-П.
БЛА-П содержит фюзеляж 1, выполненный в виде ферменной конструкции из алюминиевого сплава, интегрированной с лонжероном крыла 2. Крыло 2 - лонжеронно-кесонной схемы трапециевидной формы в плане, среднего удлинения. Конструктивно крыло представляет собой кессон усиленный ферменным лонжероном из алюминиевого сплава, воспринимающий изгибающие и крутящие аэродинамические нагрузки от фюзеляжа и винтомоторной установки. Винтомоторная установка представляет собой два двигателя 3 с тянущими винтами, симметрично расположенные на крыле 2. В передней части фюзеляжа 1 расположено переднее горизонтальное оперение 4, представляющее собой цельно поворотную конструкцию. Органы управления вдоль задней кромки крыла 2 включают в себя элероны 5, расположенные в концевой части крыла, и рули высоты 6, расположенные по центру задней кромки крыла 2. Также на крыле 2 симметрично плоскости XOY и XOZ в зоне максимального обдува воздушными винтами 3 расположены кили 7 с рулями 8 направления. Кили 7 размещены между стержнями 9 пространственной фермы, являющейся взлетно-посадочной опорой. В фюзеляже 1 размещается вооружение 10 и элементы авионики (на чертежах не показаны). Вооружение 10 размещено в фюзеляже 1 вдоль расчетной оси, проходящей через центр масс БЛА-П и крепится к ферменной конструкции фюзеляжа 1 с помощью специальной подвески и демпфера, обеспечивающих при выстреле продольную подвижность и демпфирование.
Предлагаемая концепция БЛА-П вертикального взлета и посадки, обеспечивает мобильность старта и универсальность его базирования, а так же снимает проблемы, связанные с созданием стартовых устройств. Вертикальный старт БЛА-П с последующим переходом в горизонтальный полет возможен как энергетически, так и по условиям продольной и боковой управляемости и балансировки. Взлет БЛА-П осуществляется вертикально (см. фиг. .3) с последующим переходом в горизонтальный полет, посадка также осуществляется вертикально. Особенность компоновки органов управления БЛА-П состоит в том, что они находятся в поле скоростей потока воздуха, отбрасываемого воздушным винтом, и обеспечивают балансировку и управляемость БЛА-П на околонулевых скоростях полета. Элероны 5 обеспечивают БЛА-П управление по крену, рули высоты 6 обеспечивают его управление и балансировку по тангажу на вертикальных режимах полета. Управление и балансировку на горизонтальных режимах полета обеспечивают ПГО 4 и рули высоты 6, а путевую устойчивость, управление и балансировку по рысканию на вертикальных и горизонтальных режимах полета обеспечивают кили 7 с рулями направления 8.
При произведении выстрела, прохождение силы «отдачи» размещенного в БЛА-П вооружения через его центр масс позволяет минимизировать моментные возмущения и сохранить путевую устойчивость БЛА-П..
Управление полетом БЛА-П осуществляется бортовым пилотажно-навигационным комплексом с использованием вычислительных средств и разнообразного навигационного оборудования. За оператором сохраняется возможность управления БЛА путем изменения (корректирования) программы полета и выдачи разовых команд управления бортовым оборудованием в особых случаях.
Таким образом, предлагаемый БЛА-П, обладая специальной аэродинамической компоновкой и системой аэродинамических органов управления, обеспечивает ему вертикальный взлет и посадку самолетного типа с прямоугольной трансформацией угла тангажа, а также устойчивое движение в процессе наведения и стрельбы с отсутствием практической на «отдачу» стрелкового вооружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотное воздушное судно-перехватчик | 2024 |
|
RU2840166C1 |
| Беспилотный летательный аппарат-перехватчик | 2018 |
|
RU2699148C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2820360C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2380286C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2820361C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2002 |
|
RU2213024C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |

Изобретение относится к авиационной технике, в частности беспилотным летательным аппаратам, предназначенным для перехвата и поражения воздушных целей. Беспилотный летательный аппарат - перехватчик представляет собой летательный аппарат вертикального взлета и посадки, выполненный по аэродинамической схеме «утка», содержит фюзеляж (1), трапециевидное крыло (2) с размещенными на нем двумя винтовыми двигателями (3) с тянущими воздушными винтами, переднее цельноповоротное горизонтальное оперение (4) и два киля (7) с поворотными рулями (8) направления. Каждый киль (7) интегрирован в единую конструкцию с взлетно-посадочной опорой, выполненной в виде пространственной фермы с отклоненными друг от друга боковыми стержнями (9). Фюзеляж выполнен в виде ферменной конструкции, интегрированной с лонжероном крыла (2). В фюзеляже (1) размещена полезная нагрузка, представляющая собой стрелковый комплекс (10), размещенный вдоль оси, проходящей через центр масс летательного аппарата. Обеспечивается устойчивое движение в процессе наведения и стрельбы. 3 ил.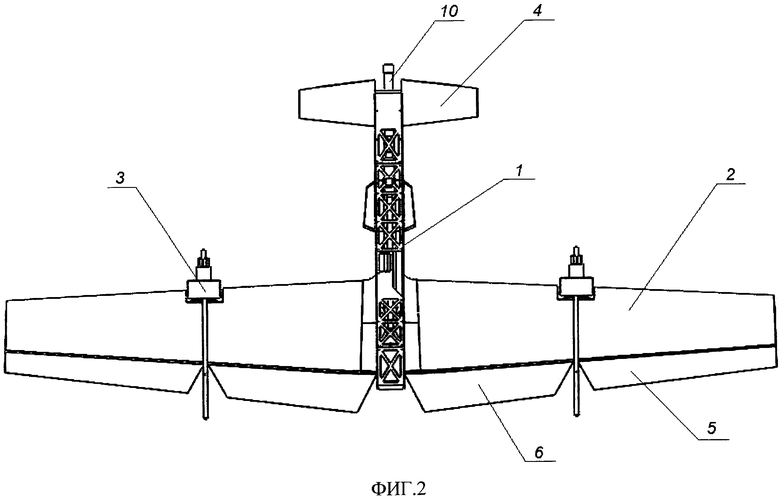
Беспилотный летательный аппарат - перехватчик, выполненный в виде свободно несущего моноплана, содержащий фюзеляж, трапециевидное крыло с размещенными на нем двумя винтовыми двигателями, два киля, снабженные поворотными рулями направления, и размещенную в фюзеляже полезную нагрузку, отличающийся тем, что он представляет собой летательный аппарат вертикального взлета и посадки, выполненный по аэродинамической схеме «утка» с закрепленным на фюзеляже передним цельно-поворотным горизонтальным оперением, причем фюзеляж выполнен в виде ферменной конструкции, интегрированной с лонжероном крыла, полезная нагрузка представляет собой стрелковый комплекс, размещенный в фюзеляже вдоль оси, проходящей через центр масс летательного аппарата, винтовые двигатели выполнены с тянущими воздушными винтами, а кили расположены на крыльях в зоне максимального обдува воздушными винтами, причем каждый киль интегрирован в единую конструкцию с взлетно-посадочной опорой, выполненной в виде пространственной фермы с отклоненными друг от друга боковыми стержнями, между которыми размещен киль.
| US 7542828 B2, 02.06.2009 | |||
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2509033C1 |
| EP 2979979 A1, 03.02.2016 | |||
| МОБИЛЬНАЯ АВИАЦИОННАЯ СИСТЕМА (ВАРИАНТЫ) | 2016 |
|
RU2623128C1 |
| Боевой беспилотный самолёт /варианты/ | 2016 |
|
RU2622327C1 |

