Изобретение относится к средствам борьбы с беспилотными летательными аппаратами.
Известно устройство уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов (ДПЛА) [1. Устройство уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов (ДПЛА) патент РФ № 2495359 МПК F41H 11/02 Опубликовано: 10.10.2013 Бюл. № 28, Заявка: 2012120112/11, 15.05.2012], состоящее из дистанционно пилотируемого летательного аппарата (ДПЛА), системы наведения с земли в виде радиолокатора, причем на летательном аппарате (ДПЛА) установлены видеокамеры обзора и датчик перемещения в хвостовой части летательного аппарата (ДПЛА) для заднего сектора, а также взаимосвязанный с датчиком перемещения контейнер, причем контейнер содержит крышку, автоматический замок для открытия контейнера, пружину, парашют и устройство для отделения парашюта.
Недостатком такого устройства является необходимость участия оператора в работе по перехвату ДПЛА, что на больших относительных скоростях сближения ДПЛА перехватчика и ДПЛА нарушителя приводит к ошибкам наведения, особенно в условиях плохой видимости. Кроме того, при промахе может осуществиться выброс парашюта для захвата ДПЛА нарушителя, а повторная атака может занять значительное время.
Известно устройство сети-ловушки для борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами (ДПЛА) [2. Устройство сети-ловушки для борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами, патент на полезную модель РФ № 72 753 МПК F41H 3/00. Опубликовано: 27.04.2008 Бюл. № 12, Заявка: 2007148485/22, 24.12.2007], состоящее из сети, к краям которой на киперных лентах крепятся грузила-стабилизаторы, причем сеть для повышения прочности изготовлена из металлизированной нити, повышающей ее прочность и скрученной в виде пружин для создания пружинящего эффекта при захвате ДПЛА, при этом грузила с контейнерами выполнены в виде складных мехов гармони, позволяющих регулировать скорость и направление движения сети во время полета, кроме этого, в грузилах размещены контейнеры для аккумуляторов (конденсаторов) для создания высокого напряжения, подаваемого по металлической поверхности сети, для вывода из строя аппаратуры управления ДПЛА.
Недостатком такого решения является использование ракеты как средства доставки сети, что накладывает ограничения на применимость в условиях плотной городской застройки. Кроме того, при промахе необходимо использовать повторный пуск ракеты, что в ряде случаев также проблематично (например, выход ДПЛА нарушителя из зоны досягаемости).
Известно устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами [3. Устройство борьбы с дистанционно пилотируемыми (беспилотными) летательными аппаратами. Патент на полезную модель РФ № 72 754 МПК F41H 13/00. Опубликовано: 27.04.2008 Бюл. № 12, Заявка: 2007139175/22, 22.10.2007], состоящее из блока доставки, блока пеленгации, блока наведения, контейнера с сетью-ловушкой, к краям которой крепятся грузы, причем сеть-ловушка с грузилами, размещенная в контейнере, доставляется в район нахождения ДПЛА с помощью блока доставки (ракеты), наводится на ДПЛА с помощью блока наведения по данным блока пеленгации, полученными звукотепловым способом, после чего сеть-ловушка синхронно отстреливается с помощью четырех патронов в сторону цели, при этом грузила, представляющие круглые стабилизаторы, с отверстиями для крепления киперных лент, растягивают данную сеть-ловушку, обеспечивая накрытие и захват БПЛА.
Недостатком такого устройства является то, что отстрел сети для улавливания ДПЛА – нарушителя осуществляется при атаке на него сверху и при промахе повторный заход на цель проблематичен.
Известно устройство - истребитель для уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов [4. Устройство - истребитель для уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов (ДПЛА), патент РФ № 2 490 584 МПК F41H 11/04. Опубликовано: 20.08.2013 Бюл. № 23, Заявка: 2012120114/11, 15.05.2012], состоящее из дистанционно пилотируемого летательного аппарата, системы наведения с земли в виде радиолокатора, сети, причем на дистанционно пилотируемом летательном аппарате установлены видеокамеры обзора и до четырех датчиков перемещения, а также взаимосвязанные с ними до четырех контейнеров для поражающих элементов, выполненных в виде кассет с уложенными в них сетями из высокопрочной полимерной нити из параарамидного волокна «Арамида», или «Кевлар», или «Тварон», причем по углам сети располагаются грузила-контейнеры в виде патронов с ленточными парашютами в гильзах, причем один конец ленточного парашюта закреплен за сеть, а гильза со свернутой в ней лентой отстреливается пиропатроном с замедлителем в момент охвата цели сетью, а датчики перемещения и взаимосвязанные с ними кассеты расположены на правом, левом, нижнем и верхнем боках фюзеляжа.
Недостатком такого устройства является необходимость задействования оператора, который в процессе управления, при подлете к цели по видеокамерам обзора на дистанции ближе 500 метров, наводит устройство на цель, а также необходимость задействования оператора при уравнивании скорости полёта, что может привести к ошибкам при наведении.
Известно устройство – истребитель [5. Устройство - истребитель для уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов. Патент РФ № 2 490 585 МПК F41H 11/04Опубликовано: 20.08.2013 Бюл. № 23 Заявка: 2012120116/11, 15.05.2012] для уничтожения дистанционно пилотируемых (беспилотных) летательных аппаратов, состоящее из дистанционно пилотируемого летательного аппарата, системы наведения с земли в виде радиолокатора, при этом на дистанционно пилотируемом летательном аппарате установлены видеокамеры обзора и до четырех датчиков перемещения, а также взаимосвязанные с ними до четырех контейнеров для поражающих элементов, выполненных в виде кассет с патронами, имеющих в качестве поражающего элемента иглы, имеющие ленточные парашюты, причем патрон выстреливается из кассеты вместе с гильзой, в которой имеется инерционный взрыватель для отделения гильзы от иглы и освобождения ленточного парашюта, а также датчики перемещения, при этом кассеты расположены на правом, левом, нижнем и верхнем боках фюзеляжа.
Недостатком такого устройства является привлечение оператора в процессе неведения ДПЛА перехватчика на цель по данным видеокамер обзора на дистанцию ближе 500, что затруднительно в условиях плохой видимости, а на высоких относительных скоростях сближения может привести к существенным ошибкам, вызванным человеческим фактором.
Известен беспилотный летательный аппарат – перехватчик [6.Беспилотный летательный аппарат – перехватчик, патент РФ № 2 669 904 МПК B64C 29/04, B64D 7/02, Опубликовано: 16.10.2018 Бюл. № 29, Заявка: 2018105354, 13.02.2018], выполненный в виде свободно несущего моноплана, содержащий фюзеляж, трапециевидное крыло с размещенными на нем двумя винтовыми двигателями, два киля, снабженные поворотными рулями направления, и размещенную в фюзеляже полезную нагрузку, при этом БПЛА представляет собой летательный аппарат вертикального взлета и посадки, выполненный по аэродинамической схеме «утка» с закрепленным на фюзеляже передним цельно-поворотным горизонтальным оперением, причем фюзеляж выполнен в виде ферменной конструкции, интегрированной с лонжероном крыла, полезная нагрузка представляет собой стрелковый комплекс, размещенный в фюзеляже вдоль оси, проходящей через центр масс летательного аппарата, винтовые двигатели выполнены с тянущими воздушными винтами, а кили расположены на крыльях в зоне максимального обдува воздушными винтами, причем каждый киль интегрирован в единую конструкцию с взлетно-посадочной опорой, выполненной в виде пространственной фермы с отклоненными друг от друга боковыми стержнями, между которыми размещен киль.
Недостатком аппарата является наличие стрелкового комплекса для поражения ДПЛА нарушителя, что существенно затрудняет его применение в условиях плотной городской застройки и наличия людей на земле, которые могут потенциально находиться в зоне поражения.
Известен беспилотный летательный аппарат-перехватчик [7. Беспилотный летательный аппарат-перехватчик, патент РФ № 2 699 148, МПК B64C 39/02, B64D 7/04, F41A 25/10 Опубликовано: 03.09.2019 Бюл. № 25, Заявка: 2018105355, 13.02.2018], выполненный в виде свободно несущего моноплана, содержащий фюзеляж и трапециевидное крыло с размещенными на нем двигателями, в фюзеляже которого вдоль оси, проходящей через центр масс летательного аппарата, размещено вооружение в виде стрелкового комплекса, закрепленного на силовом наборе конструкции фюзеляжа посредством переднего и заднего узлов крепления с возможностью его продольной подвижности и демпфирования.
Недостатком аппарата является наличие стрелкового комплекса для поражения беспилотного аппарата-нарушителя, что накладывает ограничения на его применение в условиях наличия людей на земле, которым стрелковый комплекс может представлять потенциальную угрозу. Кроме того, наведенияе ствола стрелкового комплекса на БПЛА-нарушитель требует высокой точности, что проблематично на определённых ракурсах атаки и в условиях ветровых воздействий на беспилотный летательный аппарат-перехватчик.
Известна беспилотная воздушная система-перехватчик [8. Патент US20180105271 «Беспилотная воздушная система-перехватчик» от 21.07.2017], содержащая жёсткую фиксированную раму прямоугольной формы, образующую корпус беспилотной системы, по углам которой размещены электродвигатели с пропеллерами способными изменять свою ориентацию в пространстве, причём на раме установлено улавливающиее устройство в виде сети, которое обеспечивает захват БЛА-нарушителя, который в последствии опускается на парашюте или транспортируется в заданную точку. Размер ячеек элементов решётки не превышает 1/3 поперечного сечения, перехватываемого БЛА. Для управления процессом наведения на перехватываемый БЛА воздушная система – перехватчик оснащена различными датчиками обнаружения и вычислительным устройством, осуществляющим обработку данных о перехватываемой цели.
Недостатком такой системы является ожидаемая невысокая скорость полёта к точке перехвата, вызванная отсутствием каких-либо аэродинамических поверхностей, а также сложность перехвата сетью на определённых углах подлёта БЛА перехватчика к объекту перехвата.
Данная система выбрана в качестве прототипа.
Технической задачей изобретения является повышение дальности действия, манёвренных свойств БЛА-перехватчика и точности автоматического захвата цели в сеть.
Данный результат достигается тем, что в известную беспилотную воздушную систему-перехватчик содержащую жёсткую фиксированную раму прямоугольной формы, образующую корпус беспилотной системы, по углам которой размещены электродвигатели с пропеллерами способными изменять свою ориентацию в пространстве, причём на раме установлено улавливающие устройство в виде сети, которое обеспечивает захват БЛА-нарушителя, который в последствии опускается на парашюте или транспортируется в заданную точку, размер ячеек элементов решётки не превышает 1/3 поперечного сечения перехватываемого БЛА. Для управления процессом наведения на перехватываемый БЛА воздушная система – перехватчик оснащена различными датчиками обнаружения и вычислительным устройством, осуществляющим обработку данных о перехватываемой цели, дополнительно введено крыло с изменяемой геометрией, способное под действием электродвигателя с редуктором и шарниров менять свою форму, образуя конструкцию заданной конфигурации с одновременным растяжением улавливающей сети, причём два дополнительных двигателя коррекции обеспечивают оптимальный подлёт БЛА-перехватчика к цели.
Сущность изобретения поясняется фиг. 1-8
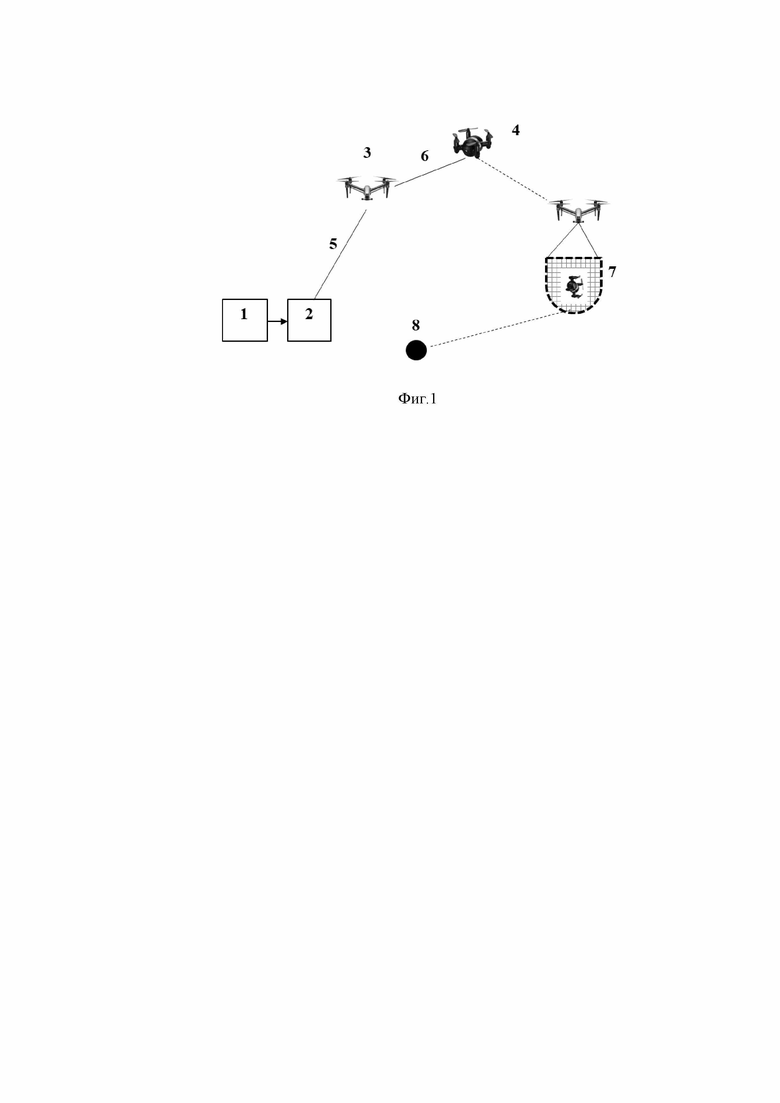
Фиг.1 – пояснение процесса перехвата БЛА – нарушителя;
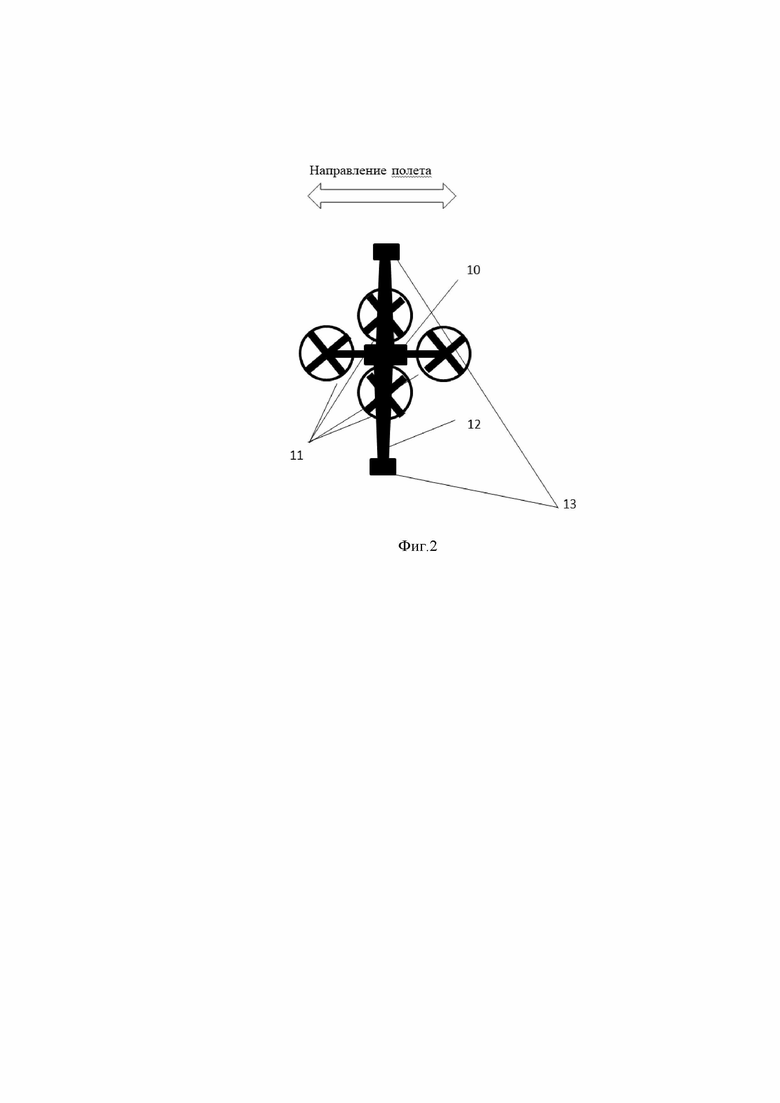
Фиг. 2 – БЛА-перехватчик вид сверху;
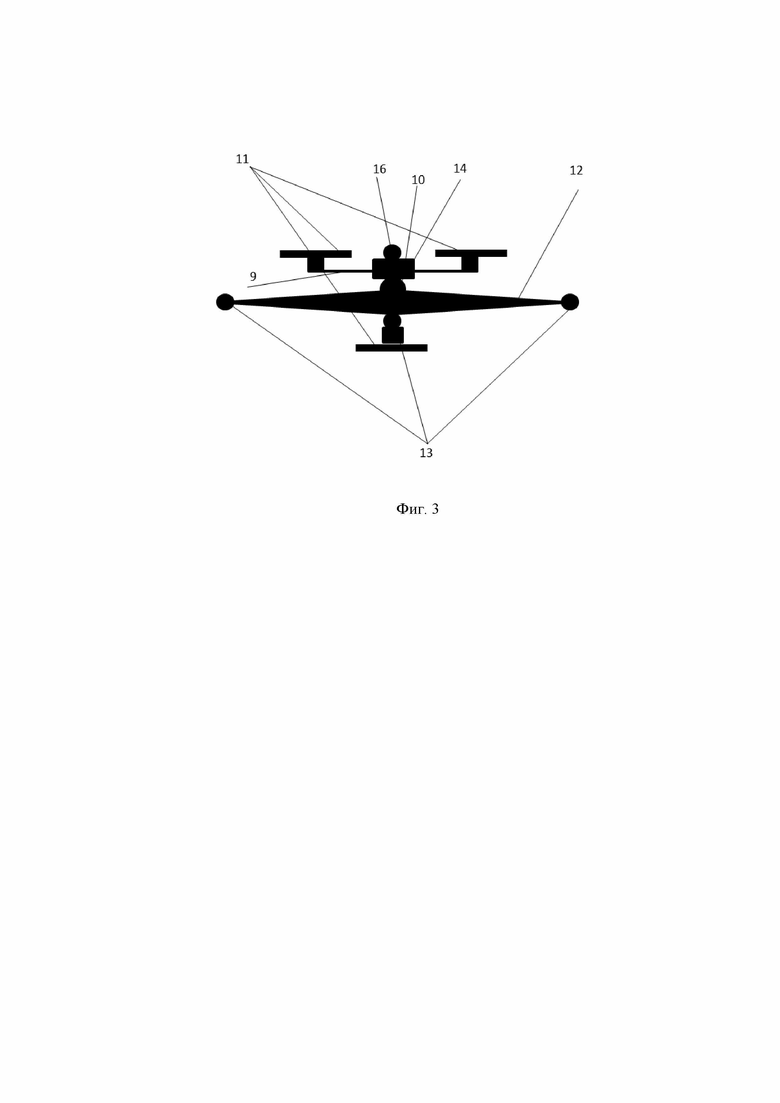
Фиг.3 - БЛА–перехватчик вид спереди;
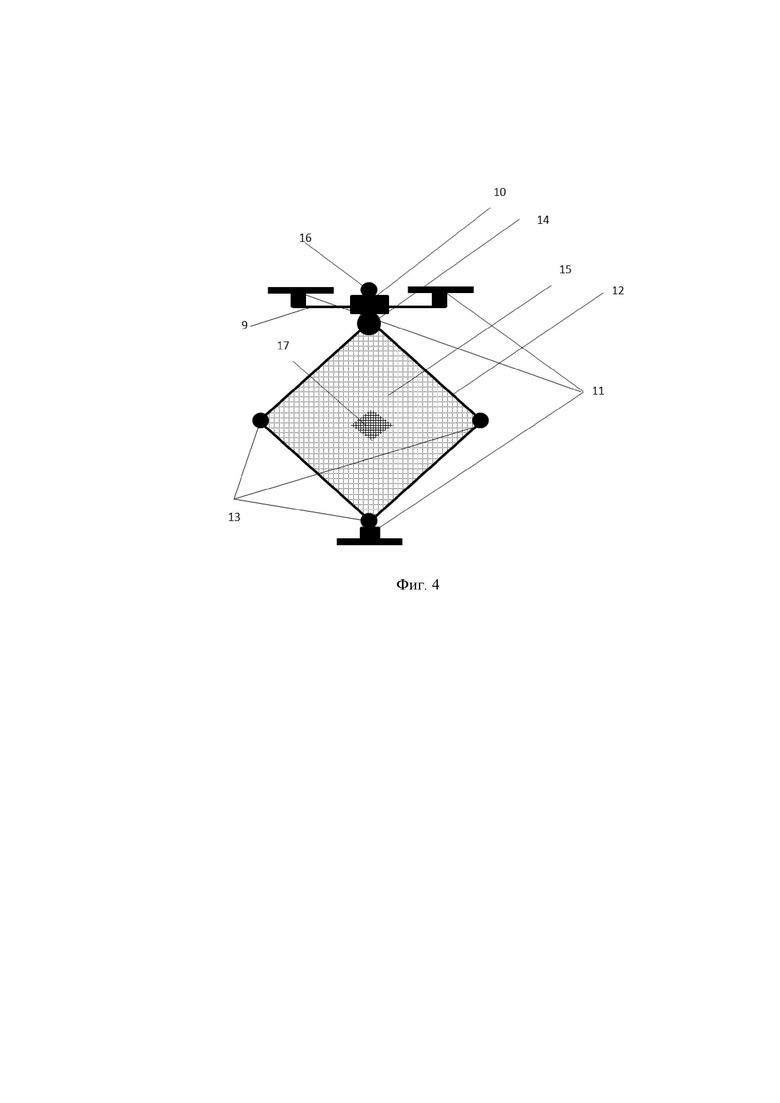
Фиг. 4 - БЛА–перехватчик с изменённой геометрией крыла и развёрнутой сетью для улавливания (вид спереди);
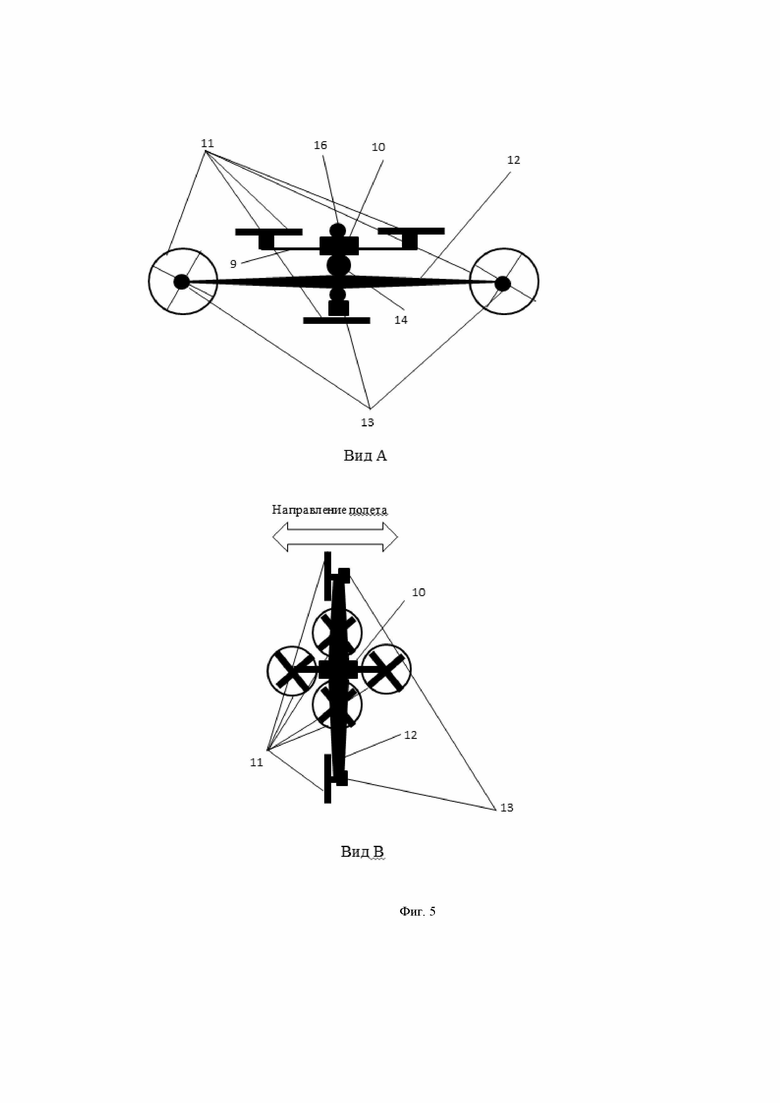
Фиг. 5 - БЛА–перехватчик с дополнительными электромоторами и пропеллерами, (вид А – вид спереди, вид В – вид сверху);
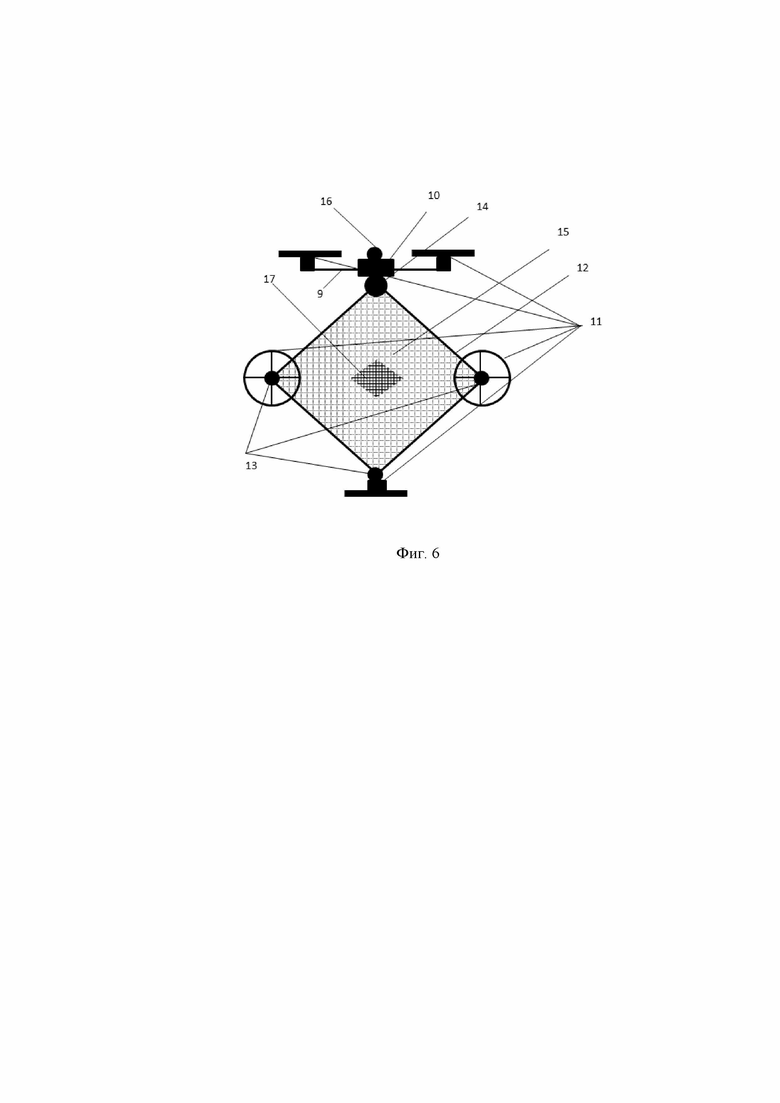
Фиг. 6 - Вид спереди БЛА – перехватчика с изменённой геометрией крыла, развёрнутой сетью для улавливания с дополнительными электромоторами и пропеллерами;
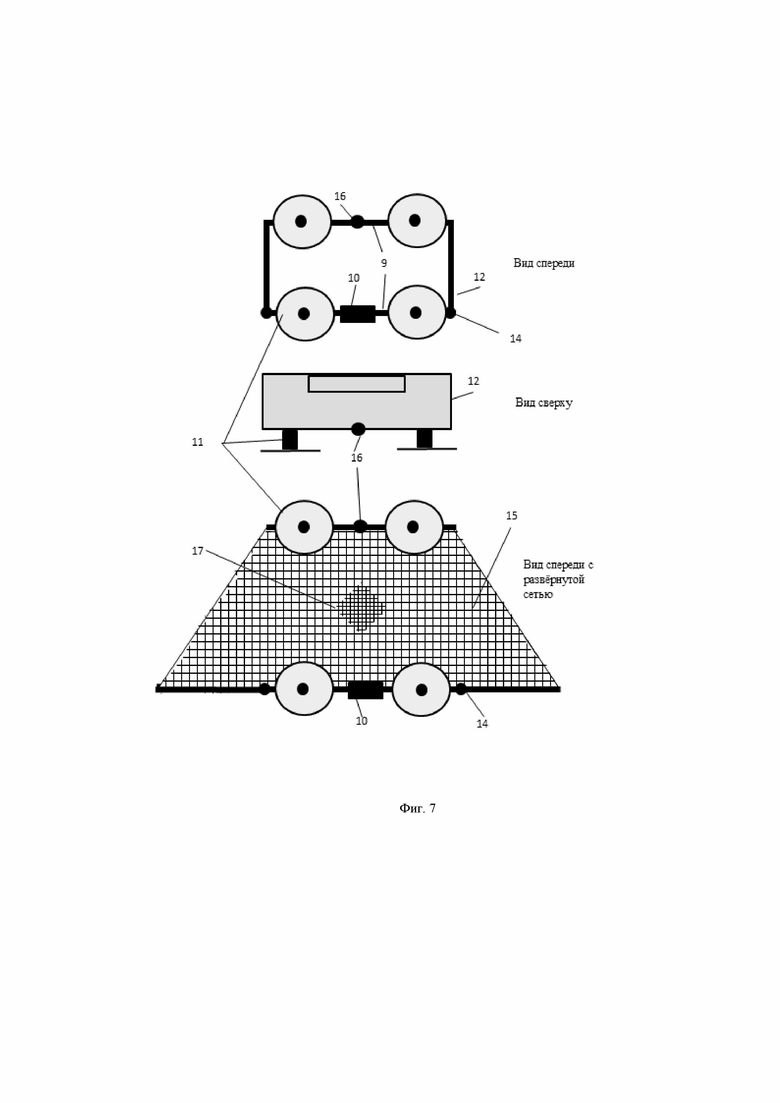
Фиг. 7 - БЛА–перехватчик по схеме биплан.
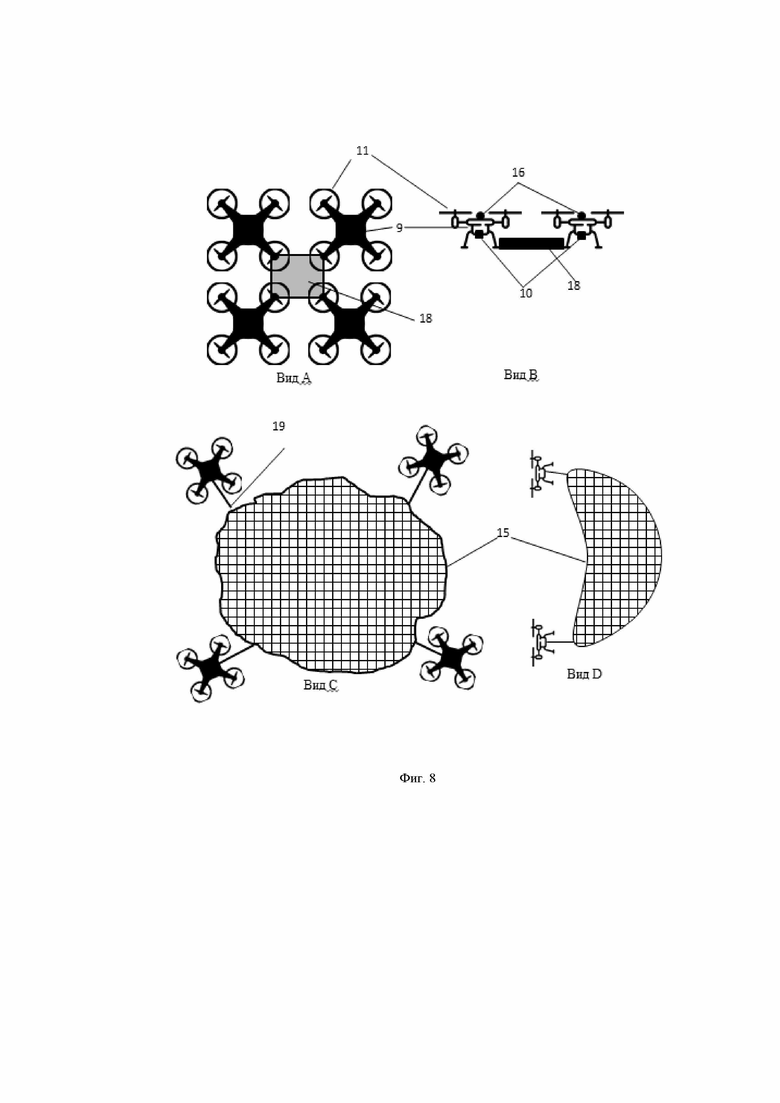
Фиг. 8 - БЛА–перехватчик на основе группы корпусов (вид А – вид сверху, вид В – вид спереди, вид С – вид сверху с развёрнутой улавливающей сетью, вид D - вид сбоку с развёрнутой улавливающей сетью).
На фиг.1-8 обозначено:
1 – устройство обнаружения БЛА нарушителя;
2 – наземный пункт управления БЛА;
3 – БЛА – перехватчик;
4 – БЛА – нарушитель;
5 – траектория полёта БЛА перехватчика в точку встречи по данным наземного пункта управления;
6 – траектория этапа самонаведения (комбинированного наведения) на БПЛА-нарушитель;
7 – транспортировка БЛА нарушителя в заданную точку 8.
9 – корпус беспилотной системы;
10 – блок аппаратуры управления, система энергоснабжения, автопилот и приёмник команд управления;
11 – электродвигатели с пропеллерами;
12 – крыло с изменяемой геометрией;
13 – шарниры;
14 – электродвигатель с редуктором;
15 – улавливающая сеть;
16 – датчики обнаружения и измерения расстояний;
17 – уплотнение;
18 – контейнер с сетью;
19 – трос.
Устройство перехвата беспилотных летательных аппаратов работает следующим образом.
Устройство обнаружения БЛА – нарушителя 1 (см. фиг. 1) в пределах своей зоны ответственности производит поиск, обнаружение БЛА-нарушителя 4, определяет его пространственные координаты и проекции вектора скорости на оси декартовой системы координат (устройство обнаружения БЛА – нарушителя 1 может представлять собой радиолокатор обнаружения активного типа, полуактивного (двухпозиционного) со специальным передатчиком или с передатчиком систем сотовой связи, цифрового телевидения, пассивную многопозиционную радиотехническую систему угломерного или разностно-дальномерного типов и др.).
По данным вычисленных координат определяется степень опасности обнаруженного БЛА – нарушителя 4 относительно объекта прикрытия (на фигуре не показан). Если БЛА-нарушитель представляет опасность, то наземный пункт управления БЛА 2 формирует команду на старт БЛА-перехватчика 3. Наведение БПЛА-перехватчика 3 осуществляется радиокомандным методом по данным наземного пункта управления БЛА 2, по координатам от устройства обнаружения БЛА-нарушителя 1.
После старта БЛА-перехватчика 3 осуществляется его наведение по траектории 5 по командам с наземного пункта управления БЛА 2 в точку встречи. Закон наведения может быть использован как в [9. Вейцель, В.А.; Архангельский, В.А.; Волковский, А.С. и др. Радиосистемы и комплексы управления. М.: Вузовская книга. 574 с. 2016 г.], при сближении на некоторое расстояние с БЛА-нарушителем осуществляется включение бортовых датчиков обнаружения размещаемых на устройстве 3 и выполняется терминальная фаза наведения по траектории 6 на БПЛА-нарушитель 4. На некоторой дистанции между БЛА-перехватчиком 3 и БЛА – нарушителем 4 осуществляется раскрытие улавливающей сети и захват в нее БЛА – нарушителя 4. После прекращения полёта БЛА – нарушителя 4 осуществляется транспортировка 7 БЛА нарушителя 4 в заданную точку 8, либо сброс БЛА-нарушителя 4.
БПЛА – перехватчик 3 фиг. 2-8, выполненный по типу мультиклоптера, содержит корпус беспилотной системы 9, блок аппаратуры управления, систему энергоснабжения, автопилот и приёмник команд управления 10, которые обеспечивают все фазы его работы, а полет осуществляется за счёт тяги, создаваемой электродвигателями с пропеллерами 11, и дополнительной подъёмной силой, создаваемой полым крылом с изменяемой геометрией 12. Крыло с изменяемой геометрией 12 способно принять заданную форму (см. фиг. 4, фиг. 6, фиг. 7) за счёт шарниров 13 под действием электродвигателя с редуктором 14. При подлёте к БЛА-нарушителю 4 по команде с наземного пункта управления 2 передаётся команда на включение датчиков-обнаружителей и измерения расстояний 16, при поступлении от которых подаётся команда на включение электродвигателя с редуктором 14 с последующим изменением геометрии крыла 12. Расположенная внутри крыла сложенная улавливающая сеть 15, прикреплённая в определённых местах к крылу с изменяемой геометрией 12, раскладывается под действием скоростного напора воздушного потока на уплотнение 17 (см. фиг. 4, фиг. 6., фиг. 7), а после улавливания БЛА-нарушителя 4 вытягивается в сторону противоположную полёту БЛА-перехватчика 3.
Соосно с шарнирами 12 могут крепиться дополнительные электродвигатели с пропеллерами 11 (фиг. 5 и фиг. 6) для повышения манёвренных свойств БЛА-перехватчика 4 на этапе терминального наведения 6, дополнительная аппаратура обнаружения БЛА (видеокамеры, лидары, РЛС, ультразвуковые датчики расстояний и пр.).
БЛА – перехватчик 4 может быть выполнен в виде биплана (см. фиг. 7) с блоком аппаратуры управления, системой энергоснабжения, автопилотом и приёмником команд управления 10, четырьмя электродвигателями с пропеллерами 11, причём крыло с изменяемой геометрией 12 под действием двух электродвигателей с редукторами 14 осуществляет изменение конфигурации БЛА – перехватчика 4, разделяя его на две части, соединённые улавливающей сетью 15, а терминальное наведение на БЛА-нарушитель осуществляется по информации от датчиков обнаружения и измерения расстояний 16. Применение такого подхода позволяет увеличить площадь улавливающей сети 15, а следовательно, и вероятность успешного перехвата БЛА-нарушителя 3.
БЛА – перехватчик 4 может быть выполнен в виде аппарата (см. фиг. 8), состоящего из 4 независимых корпусов беспилотной системы 9, имеющих блоки аппаратуры управления, систему энергоснабжения, автопилот и приёмник команд управления 10, электродвигатели с пропеллерами 11, при этом, как минимум, один из корпусов беспилотной системы 9 содержит датчики обнаружения и измерения расстояний 16, причём все четыре корпуса беспилотной системы 9 прикреплены к контейнеру с сетью 18 (см. фиг. 8., вид А и вид В). При подлёте к БЛА-нарушителю 4 под действием электрозамков (на фиг. 8 не показано) производится расцепление независимых корпусов беспилотной системы 9 с контейнером, с сетью 18 и развёртывание улавливающей сети (см. фиг. 8., вид С и вид D) 15, которая крепится к независимым корпусам беспилотной системы 9 тросами 19. Собственно контейнер с сетью 18 может сбрасываться вниз, или быть составным и в равных частях крепиться к независимым корпусам беспилотной системы 9. Применение такого подхода позволяет существенно увеличить площадь улавливающей сети 15, а следовательно, и вероятность успешного перехвата БЛА-нарушителя 3 и придать больше степеней свободы при наведении по траектории 6.
При наведении такой конструкции один из независимых корпусов беспилотной системы 9 является ведущим, а остальные ведомыми. При разделении независимых корпусов беспилотной системы 9 управление ими осуществляется, как мультиагентной группы, известными алгоритмами, например, как [10. В.И. Меркулов, Д.А. Миляков, И.О. Самодов. Оптимизация алгоритма группового управления беспилотными летательными аппаратами в составе локальной сети. Известия ЮФУ. Технические науки. С. 157-166. 11. Д.Я. Иванов Формирование строя группой беспилотных летательных аппаратов при решении задач мониторинга. Известия ЮФУ. Технические науки. Тематический выпуск. С.219-224. 12. Казанин Д. К. Защита от взаимных столкновений при формировании строя беспилотных летательных аппаратов. Управление большими системами. Выпуск 69. С. 102-123., 13. Каляев И.А., Гайдук А.Р., Капустян С.Г. Модели и алгоритмы коллективного управления в группах роботов. – М.: Физматлит, 2009. – 280.]. После улавливания БЛА-нарушителя 4 осуществляется его доставка или сброс в нужную точку, после чего независимые корпуса беспилотной системы 9 самостоятельно возвращаются к точке старта.
Таким образом, достигается большая вероятность перехвата за счет увеличения площади улавливающей сети.
Технически устройство перехвата беспилотных летательных аппаратов может быть реализовано на типовых элементах, узлах, блоках и агрегатах, которые используется при проектировании БЛА и квадрокоптеров [14. Яценков В. С. Твой первый квадрокоптер: теория и практика. - СПб.: БХВ-Петербург, 2016. - 256 с.].
Улавливающая сеть может быть выполнена по аналогии используемых сетей в системах NET Gun [15. Электронный ресурс http://net.arient.ru/blog/security. Режим доступа свободный, с экрана. Дата обращения 12.05.2020], средстве сковывания движений биологических объектов c увеличенным размером сети ССД-2сб (НЕВОД) [16. Средство сковывания движений биологических объектов (ССД-2см). Паспорт и инструкция по эксплуатации. НПФТ. 043000.003 ПС] и аналогичных им.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат-перехватчик | 2020 |
|
RU2741142C2 |
| СПОСОБ ЗАХВАТА ВОЗДУШНОЙ ЦЕЛИ СЕТЬЮ | 2020 |
|
RU2745590C1 |
| Беспилотный летательный аппарат-перехватчик | 2024 |
|
RU2825353C1 |
| СПОСОБ ПОРАЖЕНИЯ ВОЗДУШНОЙ ЦЕЛИ НАД ОБЪЕКТОМ | 2024 |
|
RU2838712C1 |
| УСТРОЙСТВО УНИЧТОЖЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫХ (БЕСПИЛОТНЫХ) ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ДПЛА) | 2012 |
|
RU2495359C1 |
| Способ и устройство противодействия беспилотным летательным аппаратам | 2023 |
|
RU2818398C1 |
| УСТРОЙСТВО - ИСТРЕБИТЕЛЬ ДЛЯ УНИЧТОЖЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫХ (БЕСПИЛОТНЫХ) ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ДПЛА) | 2012 |
|
RU2490584C1 |
| УСТРОЙСТВО - ИСТРЕБИТЕЛЬ ДЛЯ УНИЧТОЖЕНИЯ ДИСТАНЦИОННО ПИЛОТИРУЕМЫХ (БЕСПИЛОТНЫХ) ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2490585C2 |
| Способ противодействия беспилотным летательным аппаратам | 2020 |
|
RU2743401C1 |
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
Изобретение относится к средствам борьбы с беспилотными летательными аппаратами. Устройство перехвата беспилотных летательных аппаратов (БЛА) состоит из корпуса беспилотной системы, блока аппаратуры управления, системы энергоснабжения, автопилота и приёмника команд управления, электродвигателей с пропеллерами, крыла с изменяемой геометрией, шарниров, электродвигателя с редуктором, улавливающей сети, датчиков обнаружения и измерения расстояний. Устройство перехвата беспилотных летательных аппаратов (далее БЛА-перехватчик) представляет собой аппарат мультикоптерной схемы с более чем четырьмя пропеллерами, крылом, способным менять свою геометрию, образуя прямоугольную конструкцию, снабженную сетью для улавливания БЛА-нарушителя, при этом БЛА-перехватчик оснащён датчиками обнаружения (видеокамеры) и устройствами определения расстояния до объекта перехвата. Достигается повышение дальности действия, манёвренные свойства БЛА-перехватчика и точность автоматического захвата цели в сеть в момент попадания БЛА-нарушителя. 4 з.п. ф-лы, 8 ил.
1. Устройство перехвата беспилотных летательных аппаратов, содержащее жёсткую фиксированную раму прямоугольной формы, образующую корпус беспилотной системы, по углам которой размещены электродвигатели с пропеллерами, способными изменять свою ориентацию в пространстве, причём на раме установлено улавливающее устройство в виде сети, которое обеспечивает захват БЛА-нарушителя, датчиками обнаружения и вычислительным устройством, осуществляющим обработку данных о перехватываемой цели, отличающееся тем, что дополнительно введены более четырёх электродвигателей с пропеллерами, крыло с изменяемой геометрией, шарниры и электродвигатель с редуктором, обеспечивающие изменение геометрии крыла для раскрытия улавливающей сети с последующим захватом БЛА-нарушителя.
2. Устройство перехвата беспилотных летательных аппаратов по п. 1, отличающееся тем, что соосно с шарнирами закреплены дополнительные электродвигатели с пропеллерами.
3. Устройство перехвата беспилотных летательных аппаратов по п. 1, отличающееся тем, что соосно с шарнирами закреплены датчики обнаружители радиолокационного, оптического и ультразвукового типов.
4. Устройство перехвата беспилотных летательных аппаратов по п. 1, отличающееся тем, что оно выполнено в виде биплана с крылом с изменяемой геометрией, при этом осуществляется изменение конфигурации БЛА–перехватчика, разделяя его на две части, соединённых улавливающей сетью.
5. Устройство перехвата беспилотных летательных аппаратов по п. 1, отличающееся тем, что БЛА-перехватчик состоит из четырёх независимых корпусов беспилотной системы, несущих контейнер с сетью.
| СИСТЕМА И СПОСОБ ПРЕДОТВРАЩЕНИЯ НАРУШЕНИЙ ПРАВИЛ ПОЛЕТОВ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2701421C1 |
| WO 2008114261 A2, 25.09.2008 | |||
| Способ противодействия выполнению задач беспилотному летательному аппарату | 2018 |
|
RU2679377C1 |
| СПОСОБ ЗАХВАТА МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2565863C2 |
| CN 107800506 А, 13.03.2018. | |||

