Изобретение относится к авиационной технике, в частности беспилотным воздушным судам (далее - БВС), предназначенным для перехвата и поражения воздушных целей.
Возросшее число инцидентов с БВС различных типов, а также возможность их применения для терактов, уничтожения техники, и других противоправных действий обусловливает востребованность директивных мер (средств) противодействия им.
В качестве средств противодействия незаконно запущенным или находящимся на запретных для полетов территориях БВС являются БВС-перехватчики (далее - БВС-П).
Известен многоцелевой БПЛА-перехватчик (патент RU 2723203 C1) в виде мультикоптера, самолета, конвертоплана, летающего крыла, вертолета, оснащенный полезной нагрузкой таранного типа, явным недостатком которого является потенциальное повреждение конструкции летательного аппарата в момент тарана.
Также известен боевой беспилотный самолет (патент RU 2622327 С1), как вариант, выполненный по аэродинамической схеме «регрессивная флюгерная утка» и оснащенный 30-мм пушкой, основным недостатком предлагаемых к применению пушек и других средств вооружения, использующих в качестве боеприпаса пули, является малая площадь поражения, что значительно усложняет прицеливание и снижает эффективность поражения небронированных целей.
Также известны варианты размещения различного вооружения на борту БВС-П, например, беспилотный летающий гранатомет (патент US 20190367169 A1), оснащение летательного аппарата гранатометным вооружением требует применения снарядов с программируемым дистанционным подрывом или снарядов с датчиком подрыва, что значительно усложняет конструкцию и повышает стоимость выстрела.
В качестве прототипа выбрано устройство, являющееся наиболее близким аналогом по технической сущности - беспилотный летательный аппарат-перехватчик (патент RU 2669904 C1), предназначенный для перехвата и поражения воздушной цели, в фюзеляже которого размещается стрелковый комплекс. БВС-П, выполненный в виде свободнонесущего моноплана, содержащий фюзеляж, трапециевидное крыло с размещенными на нем двумя винтовыми двигателями, два киля, снабженные поворотными рулями направления, и размещенную в фюзеляже полезную нагрузку, представляющий собой летательный аппарат вертикального взлета и посадки, выполненный по аэродинамической схеме «утка» с закрепленным на фюзеляже передним цельно-поворотным горизонтальным оперением, причем фюзеляж выполнен в виде ферменной конструкции, интегрированной с лонжероном крыла, полезная нагрузка представляет собой стрелковый комплекс, размещенный в фюзеляже вдоль оси, проходящей через центр масс летательного аппарата, винтовые двигатели выполнены с тянущими воздушными винтами, а кили расположены на крыльях в зоне максимального обдува воздушными винтами, причем каждый киль интегрирован в единую конструкцию с взлетно-посадочной опорой, выполненной в виде пространственной фермы с отклоненными друг от друга боковыми стержнями, между которыми размещен киль.
Недостатком указанного устройства-прототипа является недостаточная эффективность поражения воздушной цели. Указанный недостаток является следствием ряда конструктивных особенностей прототипа:
- применение одного стрелкового комплекса, что повышает требования к точностям бортовой системы наведения и снижает вероятность поражения воздушной цели, дополнительно, в случае необходимости поражения множественной (групповой) цели может возникнуть проблема недостаточного боезапаса;
- фюзеляж выполненный в виде ферменной конструкции, интегрированной с лонжероном крыла, что по сравнению с полумонококом и монококом, является более тяжелым и менее технологичным;
- планер конструктивно выполнен по схеме «утка» и в конструкции крыла планера применяется несимметричный профиль, что усложняет балансировку БВС-П и приводит, с учетом малой нагрузки на крыло, к проблемам обеспечения устойчивости летательного аппарата;
- размещение емкости для патронов стрелкового комплекса (магазина для патронов) под фюзеляжем, что создает значительное паразитное сопротивление, способствует срыву потока и интенсивному вихреобразованию;
- создание управляющих моментов рыскания с помощью только рулей направления (при двухмоторной компоновке БВС-П), что создает дополнительное аэродинамическое сопротивление;
- отсутствие на борту датчиков, которые обеспечивают точное определение высоты полета относительно подстилающей поверхности на низких высотах и режимах взлета и посадки;
- отсутствие интегрированной системы конечного наведения, осуществляющей управление летательным аппаратом на конечном участке полета.
Техническая проблема, решаемая заявленным изобретением, заключается в повышении эффективности поражения воздушных целей БВС-П.
Технические результаты заключаются в упрощении прицеливания и повышении устойчивости при одновременном снижении веса БВС-П.
Заявленные технические результаты достигаются в беспилотном воздушном судно-перехватчике (БВС-П), в виде свободно несущего моноплана, содержащем фюзеляж и трапециевидное крыло с размещенными на нем двигателями, стрелковый комплекс, выполненном по схеме «летающее крыло» и содержащем дополнительный стрелковый комплекс, систему конечного наведения, выполненную с возможностью управления на конечном участке полета, при этом указанные стрелковые комплексы, установленные в фюзеляже, выполнены с возможностью продольного перемещения и демпфирования.
Дополнительная особенность заключается в том, что фюзеляж выполнен по схеме полумонокок.
Дополнительная особенность заключается в том, что крыло выполнено с симметричным профилем.
Дополнительная особенность заключается в том, что емкости для патронов стрелковых комплексов размещены внутри фюзеляжа.
Дополнительная особенность заключается в том, что выполнено с возможностью создания управляющих моментов рыскания my посредством изменения обычного направления тяги левого и правого воздушных винтов на противоположное.
Дополнительная особенность заключается в том, что содержит датчики, обеспечивающие точное определение высоты полета относительно подстилающей поверхности на низких высотах и режимах взлета и посадки.
Технический результат достигается тем, что:
- применяется сдвоенный стрелковый комплекс. в состав которого входят два идентичных стрелковых комплекса, что снижает требования к точностям бортовой системы наведения за счет увеличения площади накрытия дробовыми элементами и тем самым повышает вероятность поражения воздушной цели, дополнительно, БВС-П несет повышенный боезапас для поражения групповой цели;
- фюзеляж БВС-П конструктивно выполнен по схеме полумонокок, что позволяет снизить вес планера и повысить его технологичность;
- планер конструктивно выполнен по схеме «летающее крыло» и в конструкции крыла планера применяется симметричный профиль, что повышает устойчивость летательного аппарата и позволяет упростить прицеливание;
- емкости для патронов стрелкового комплекса (магазины для патронов) размещены внутри фюзеляжа, что позволяет исключить паразитное сопротивление, срыв потока, интенсивное вихреобразование;
- управляющие моменты рыскания создаются с помощью изменения тяги (разнотяга) воздушных винтов летательного аппарата (при двухмоторной компоновке БВС-П), что позволяет сэкономить вес БВС-П по сравнению с применением рулей направления;
- на борту БВС-П размещены датчики, которые обеспечивают точное определение высоты полета относительно подстилающей поверхности на низких высотах в режимах взлета и посадки, что значительно снижает вероятность повреждения конструкции планера при отрыве от земли и приземлении;
- в бортовое радиоэлектронное оборудование БВС-П интегрирована система конечного наведения, включающая в себя блок датчиков (телевизионная и тепловизионная камеры) для получения видеоинформации и модуль вычислителя, задействованный в обработке видеоинформации для обнаружения и распознавания цели, осуществляющая управление летательным аппаратом на конечном участке полета посредством передачи команд управления на автопилот летательного аппарата, что значительно снижает время прицеливания и повышает его эффективность.
Заявленное изобретение поясняется на графических материалах, где:
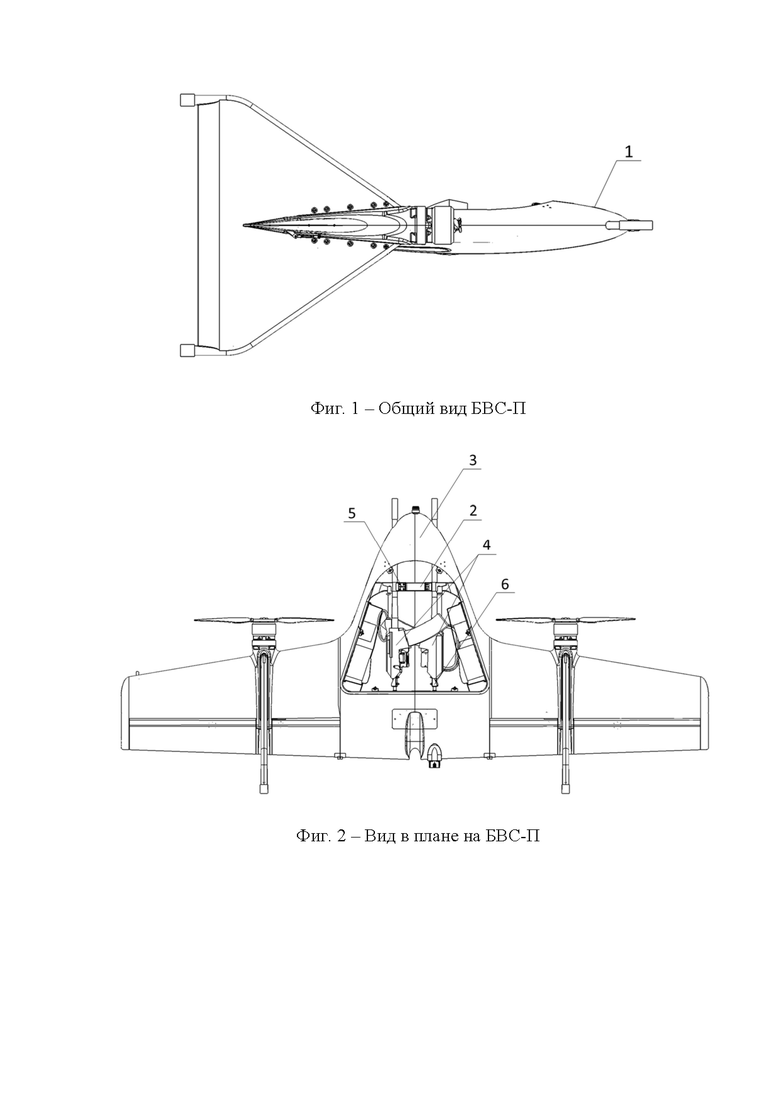
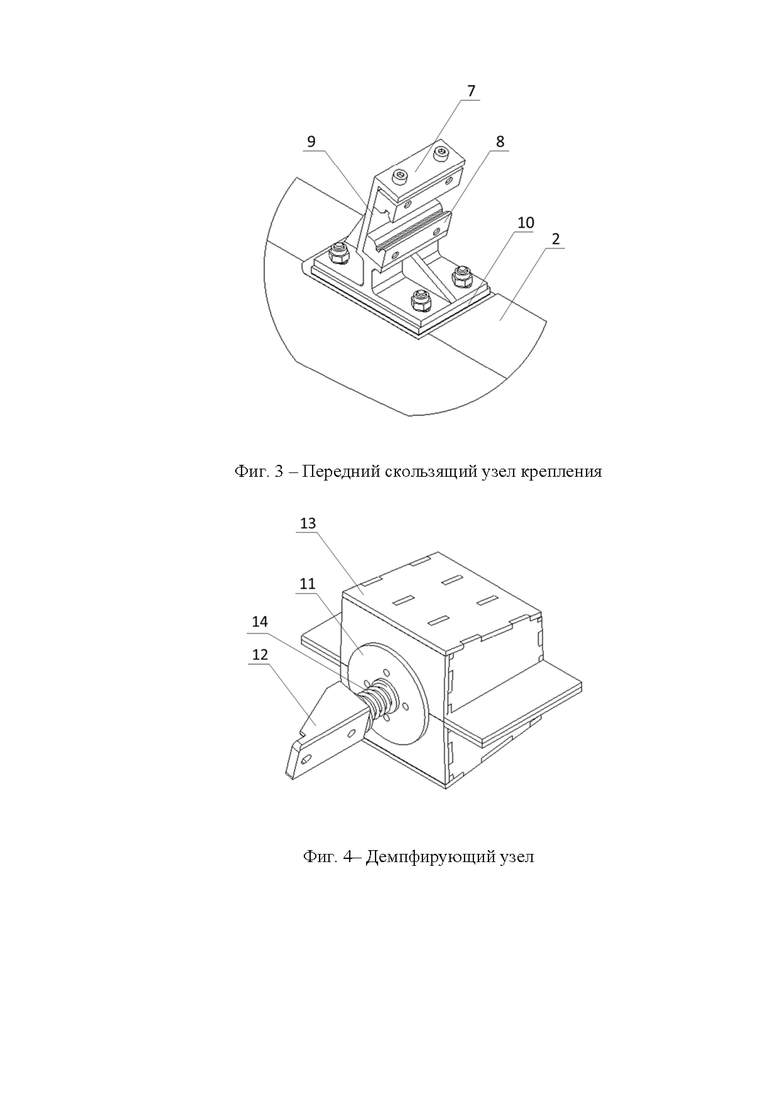
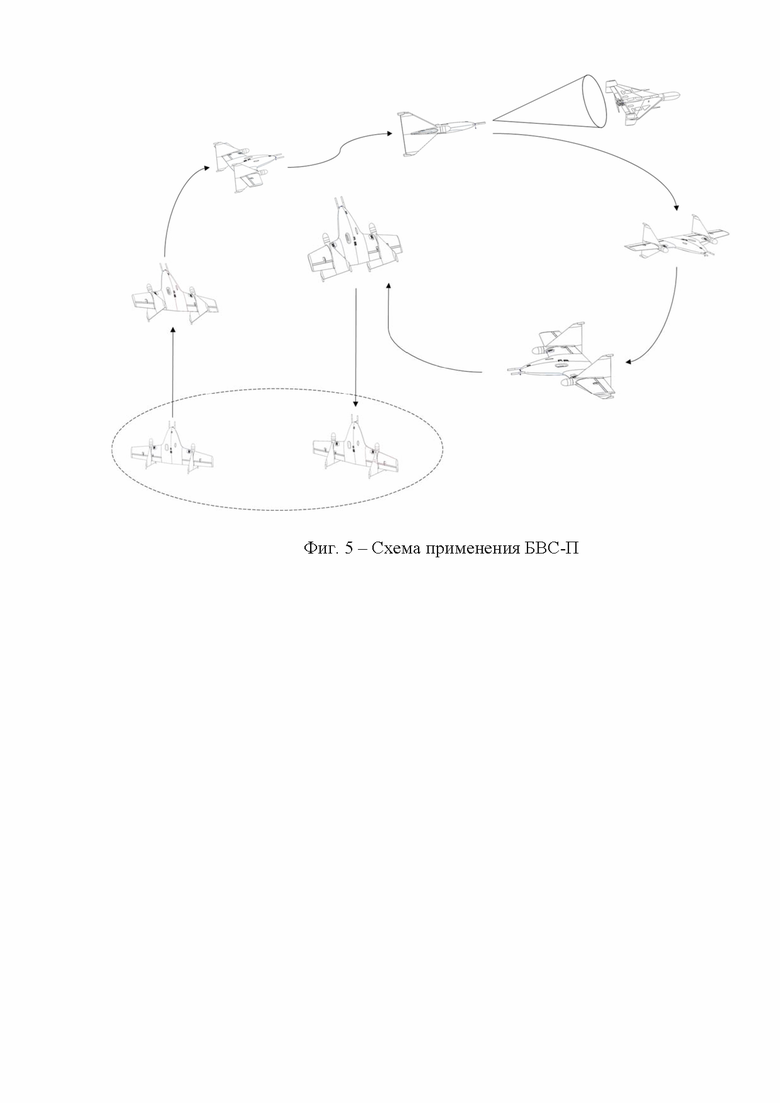
на фиг. 1 представлен общий вид БВС-П, на фиг. 2 - вид в плане на БВС-П, на фиг. 3 - передний скользящий узел крепления, на фиг. 4 - демпфирующий узел, на фиг. 5 представлена схема применения БВС-П.
Принятые обозначения:
1 - планер;
2 - лонжерон;
3 - обшивка;
4 - стрелковый комплекс;
5 - передний скользящий узел крепления;
6 - демпфирующий узел;
7 - корпус опоры;
8 - скользящая поверхность;
9 - пазы корпуса;
10 - прокладка;
11 - неподвижный цилиндр;
12 - кронштейн;
13 - короб лонжерона;
14 - пружина.
БВС-П содержит (фиг. 1) планер 1 в виде свободно несущего моноплана, имеющий аэродинамическую схему летающее крыло, конструктивно состоящий из (фиг. 2) лонжерона 2, воспринимающего практически все нагрузки как внешние, так и внутренние и обшивки 3. Внутри планера 1 размещаются стрелковые комплексы 4.
Стрелковые комплексы 4 размещены параллельно продольной оси летательного аппарата: вдоль оси, проходящей через центр масс летательного аппарата. Данное размещение обеспечивает восприятие усилий при стрельбе усиленной частью лонжерона 2.
Каждый стрелковый комплекс 4 крепится к лонжерону планера 2 посредством переднего скользящего узла крепления 5 и демпфирующего узла 6, образующего задний узел крепления. Передний скользящий узел крепления 5 (фиг. 3) выполнен в виде скользящей опоры типа «ласточкин хвост», содержащей закрепленный на передней балке лонжерона планера 2 корпус опоры 7 и скользящую поверхность 8, установленную в специально выполненные под нее пазы корпуса 9 с возможностью продольного перемещения относительно них.
Корпус 7 крепится к лонжерону 2 через прокладку 10 обеспечивающую равномерное распределение нагрузки. Демпфирующий узел (фиг. 4) включает в себя неподвижный цилиндр 11 из стали, кронштейн 12, закрепленный на стрелковом комплексе 4 посредством винтов. Кронштейн 12 имеет возможность продольного перемещения внутри цилиндра 11. Цилиндр 11 закреплен в коробе лонжерона 13. Короб лонжерона 13 предназначен для восприятия и распределения сосредоточенной нагрузки, возникающей при выстреле. Демпфирование происходит с помощью пружины 14 расположенной между стенкой кронштейна 12 и цилиндром 11.
Применение БВС-П осуществляется по следующей схеме (фиг. 5):
- снаряженный БВС-П устанавливается на стартовую площадку, подключается к наземному питанию, включается и ожидает команды с наземного пункта управления (НПУ) БВС-П;
- при получении целеуказания с НПУ посредством радиолинии БВС-П–НПУ БВС-П осуществляет вертикальный взлет, переход в горизонтальный полет в направлении указанной цели в автоматическом режиме;
- на конечном участке траектории на пути к цели БВС-П переключается на полет по камерам бортовой системы конечного наведения для точного выхода на сопровождение, перехвата цели, прицеливания и поражения цели с применением бортовых стрелковых комплексов.
В предлагаемом БВС-П реализована компоновочная схема, обеспечивающая прохождение силы «отдачи» размещенного в нем вооружения через центр масс БВС-П. Такая технология позволила минимизировать моментные возмущения, действующие на БВС-П от силы отдачи вооружения при производстве выстрела.
Уменьшение самой силы отдачи обеспечивают также специальные узлы крепления вооружения, обеспечивающие его продольную подвижность и демпфирование. Особенностью заднего узла крепления является отсутствие необходимости доработки стандартного вооружения для установки на БВС-П. В процессе стрельбы использованные гильзы выбрасываются из фюзеляжа через дефлектор, при этом обеспечивается их гарантированный выброс в зону, безопасную с точки зрения повреждения винтов БВС-П.
Изобретение позволяет применить стрелковое оружие на БВС-П, за счет подавления возникающего при выстреле влияния «отдачи» оружия, обеспечивая при этом эффективное поражение сдвоенным стрелковым комплексом воздушных мишеней при одновременном сохранении характеристик траектории полета летательного аппарата, таким образом, решается техническая проблема, а именно: повышение эффективности поражения БВС-П воздушных целей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат - перехватчик | 2018 |
|
RU2669904C1 |
| Беспилотный летательный аппарат-перехватчик | 2018 |
|
RU2699148C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| БПЛА-перехватчик (варианты) | 2024 |
|
RU2825677C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2820360C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| Беспилотный летательный аппарат-перехватчик | 2020 |
|
RU2741142C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2820361C1 |
| Штурмовик /варианты/ | 2016 |
|
RU2623638C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМОЕ БОЕВОЕ УСТРОЙСТВО | 2022 |
|
RU2826654C2 |
Изобретение относится к авиационной технике, в частности беспилотным воздушным судам (далее - БВС), предназначенным для перехвата и поражения воздушных целей. Беспилотное воздушное судно-перехватчик (БВС-П) в виде свободно несущего моноплана содержит фюзеляж и трапециевидное крыло с размещенными на нем двигателями, а также стрелковый комплекс. При этом БВС-П выполнено по схеме «летающее крыло» и содержит дополнительный стрелковый комплекс, образуя сдвоенный стрелковый комплекс, систему конечного наведения, выполненную с возможностью управления на конечном участке полета. При этом каждый стрелковый комплекс крепится к лонжерону планера посредством переднего скользящего узла крепления и демпфирующего узла, образующего задний узел крепления. Техническая проблема, решаемая заявленным изобретением, заключается в повышении эффективности поражения воздушных целей БВС-П. Технические результаты заключаются в упрощении прицеливания и повышении устойчивости при одновременном снижении веса БВС-П. 5 з.п. ф-лы, 5 ил.
1. Беспилотное воздушное судно-перехватчик (БВС-П) в виде свободно несущего моноплана, содержащее фюзеляж и трапециевидное крыло с размещенными на нем двигателями, стрелковый комплекс, отличающееся тем, что выполнено по схеме «летающее крыло» и содержит дополнительный стрелковый комплекс, образуя сдвоенный стрелковый комплекс, систему конечного наведения, выполненную с возможностью управления на конечном участке полета, при этом каждый стрелковый комплекс крепится к лонжерону планера посредством переднего скользящего узла крепления и демпфирующего узла, образующего задний узел крепления.
2. БВС-П по п. 1, отличающееся тем, что фюзеляж выполнен по схеме полумонокок.
3. БВС-П по п. 1, отличающееся тем, что крыло выполнено с симметричным профилем.
4. БВС-П по п. 1, отличающееся тем, что емкости для патронов стрелковых комплексов размещены внутри фюзеляжа.
5. БВС-П по п. 1, отличающееся тем, что система конечного наведения включает в себя блок датчиков для получения видеоинформации и модуль вычислителя, задействованный в обработке видеоинформации для обнаружения и распознавания цели, а также выполнена с возможностью осуществления управления летательным аппаратом на конечном участке полета посредством передачи команд управления на автопилот летательного аппарата.
6. БВС-П по п. 1, отличающееся тем, что содержит датчики, обеспечивающие точное определение высоты полета относительно подстилающей поверхности на низких высотах и режимах взлета и посадки.
| Беспилотный летательный аппарат - перехватчик | 2018 |
|
RU2669904C1 |
| CN 204399465 U, 17.06.2015 | |||
| БПЛА-перехватчик (варианты) | 2024 |
|
RU2825677C1 |
| Топливная центрифуга | 1961 |
|
SU145089A1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ ПИЛОТАЖНЫЙ САМОЛЕТ ЯК-54 | 2001 |
|
RU2177895C1 |

