УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение, в общем, относится к операциям бурения через подземные пласты и, более конкретно, к системам и способам управления бурением.
Типовые процессы, осуществляемые при выполнении операций бурения, могут быть сравнительно сложными и связанными со значительными расходами. Большинство указанных операций осуществляется вручную опытными операторами, выполняющими работы на буровой платформе. В этой отрасли постоянно ведется работа, направленная на повышение безопасности, снижение затрат и увеличение эффективности бурения. Развитие компьютеризованных и автоматизированных систем, применяемых для выполнения процессов бурения, представляет собой следующий этап на пути к достижению этих целей. Поскольку применение робототехнических и автоматизированных систем для выполнения процессов бурения находится в этой отрасли на начальных этапах, существует потребность разработки более эффективных, усовершенствованных и оптимизированных процессов бурения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Указанные графические материалы иллюстрируют определенные аспекты некоторых примеров реализации настоящего изобретения и не предназначены для ограничения или определения объема изобретения.
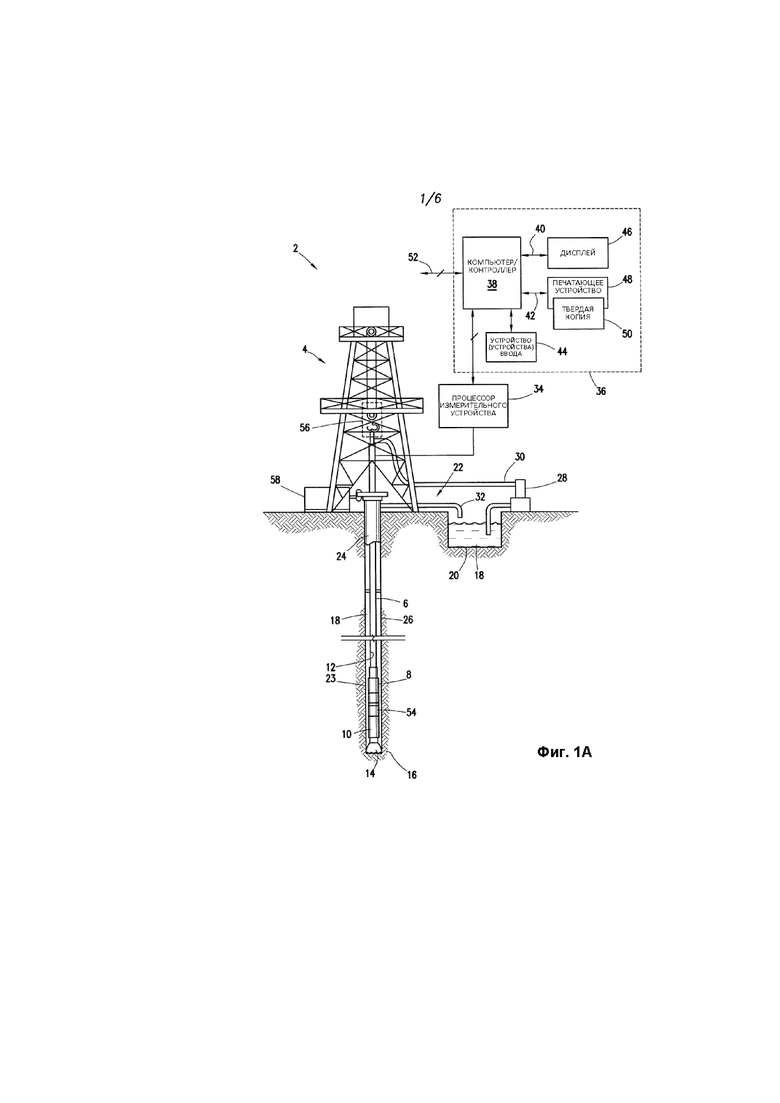
Фиг. 1A иллюстрирует схему примера реализации системы.
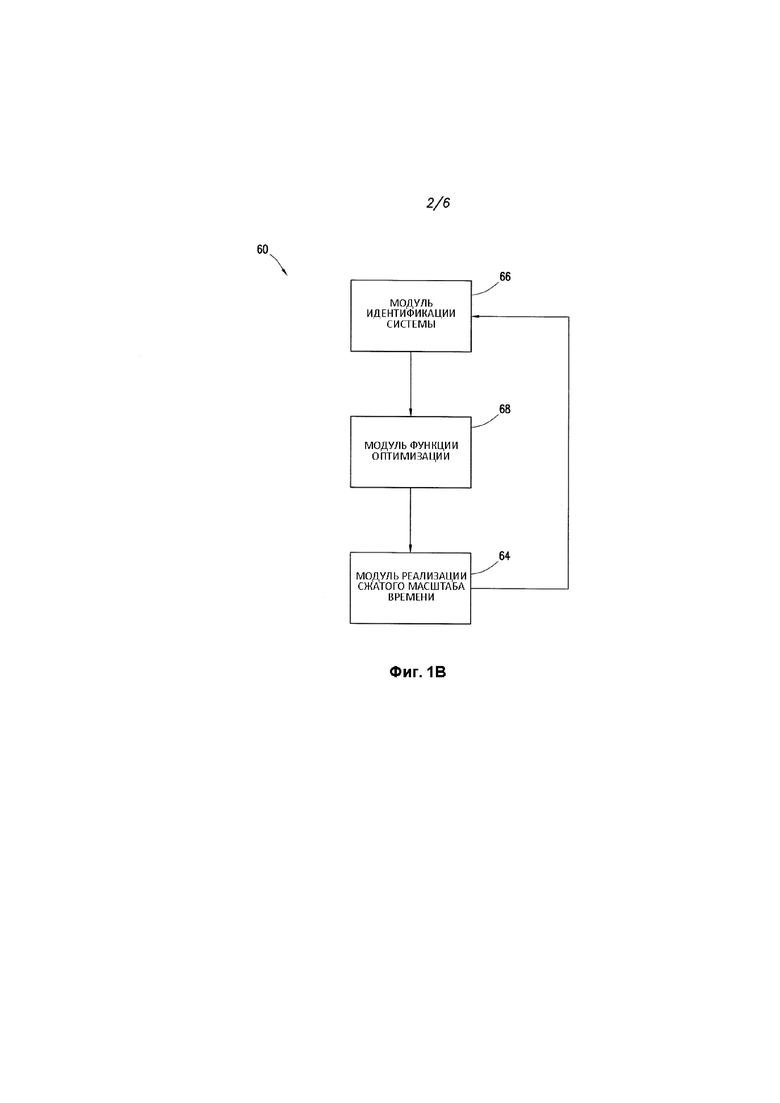
Фиг. 1B иллюстрирует схему упрощенного примера реализации компонента программы автоматизированного проектирования оптимальной траектории бурения.
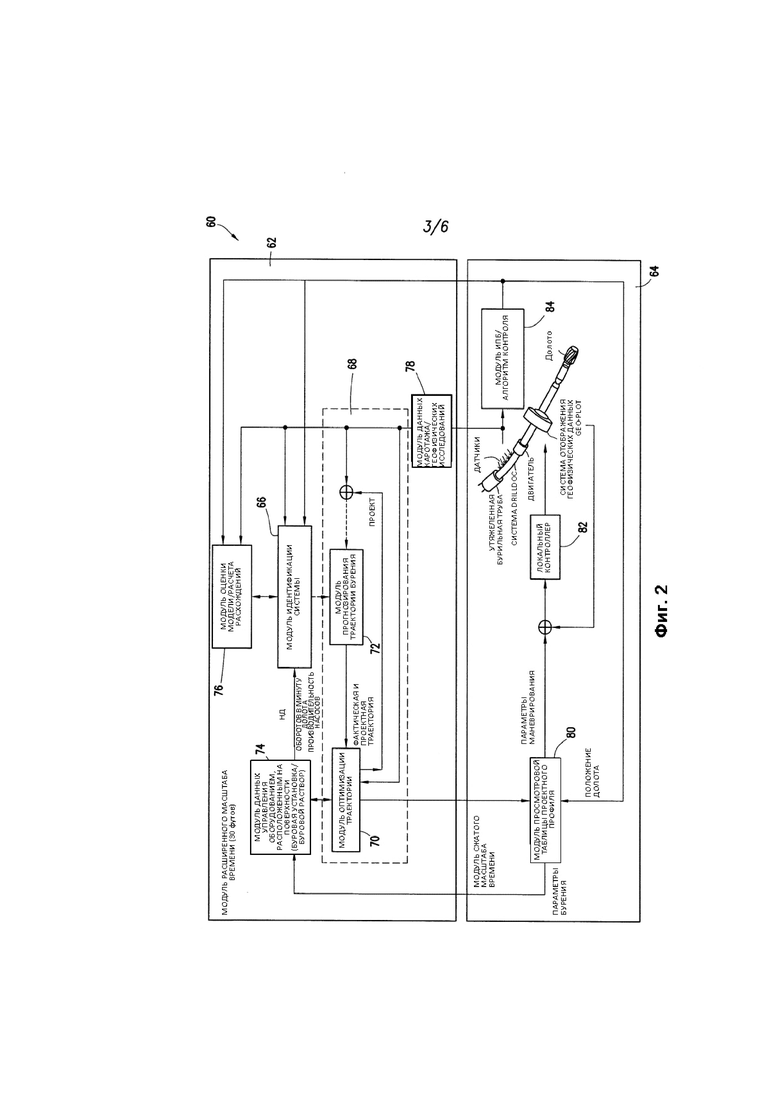
Фиг. 2 иллюстрирует подробную структурную схему примера реализации программы автоматизированного проектирования оптимальной траектории бурения.
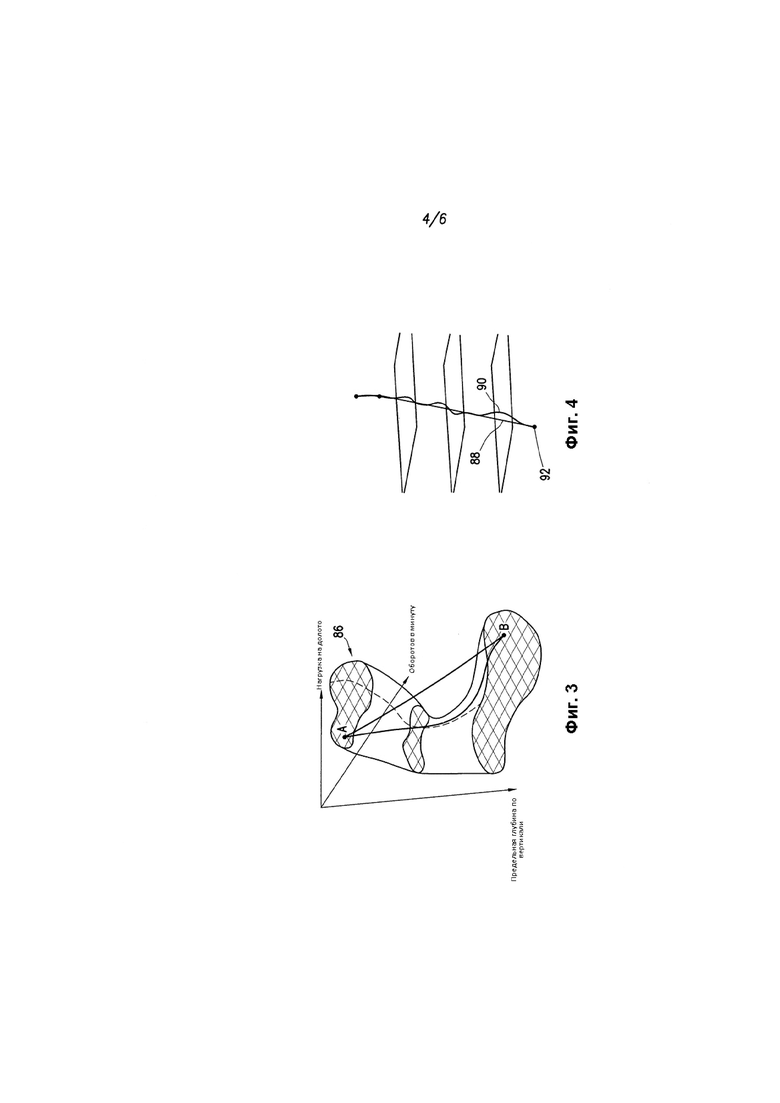
Фиг. 3 иллюстрирует пример реализации диаграммы, представляющей рабочую область системы адаптивных ограничений.
Фиг. 4 иллюстрирует известную систему, применяемую в процессе бурения для достижения точки, расположенной под поверхностью земли.
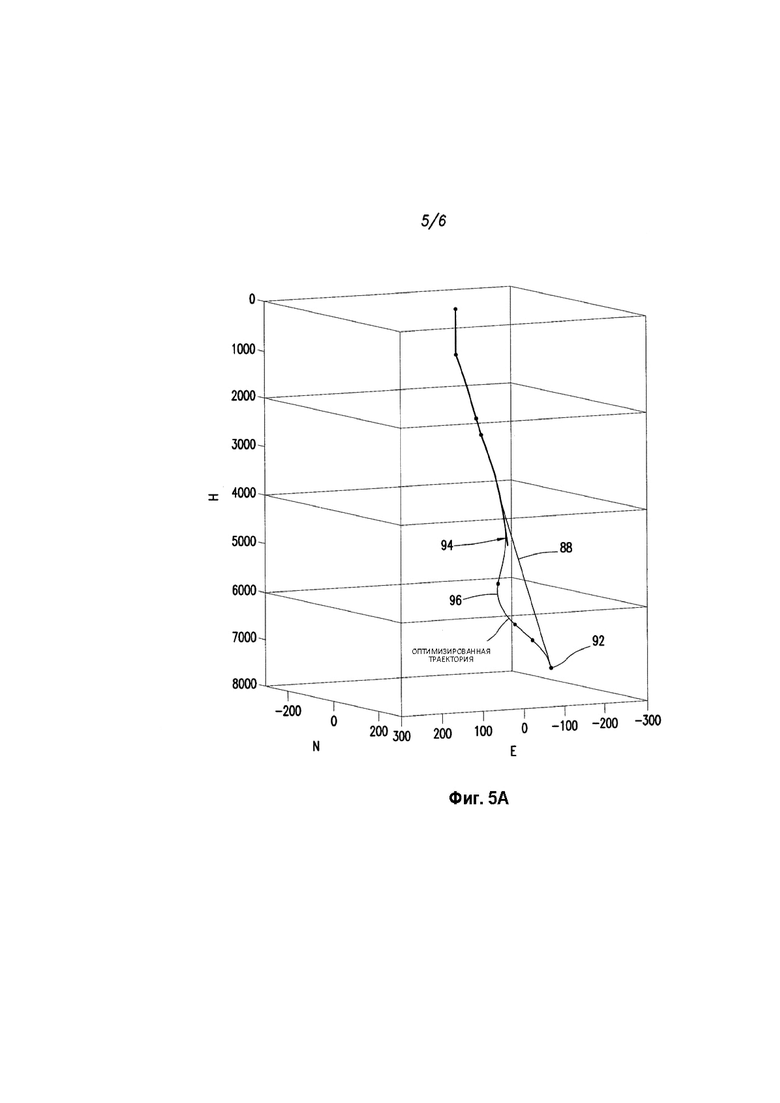
Фиг. 5A иллюстрирует пример реализации операции бурения, оптимизируемой по мере продвижения вниз сквозь породу к конечному участку.
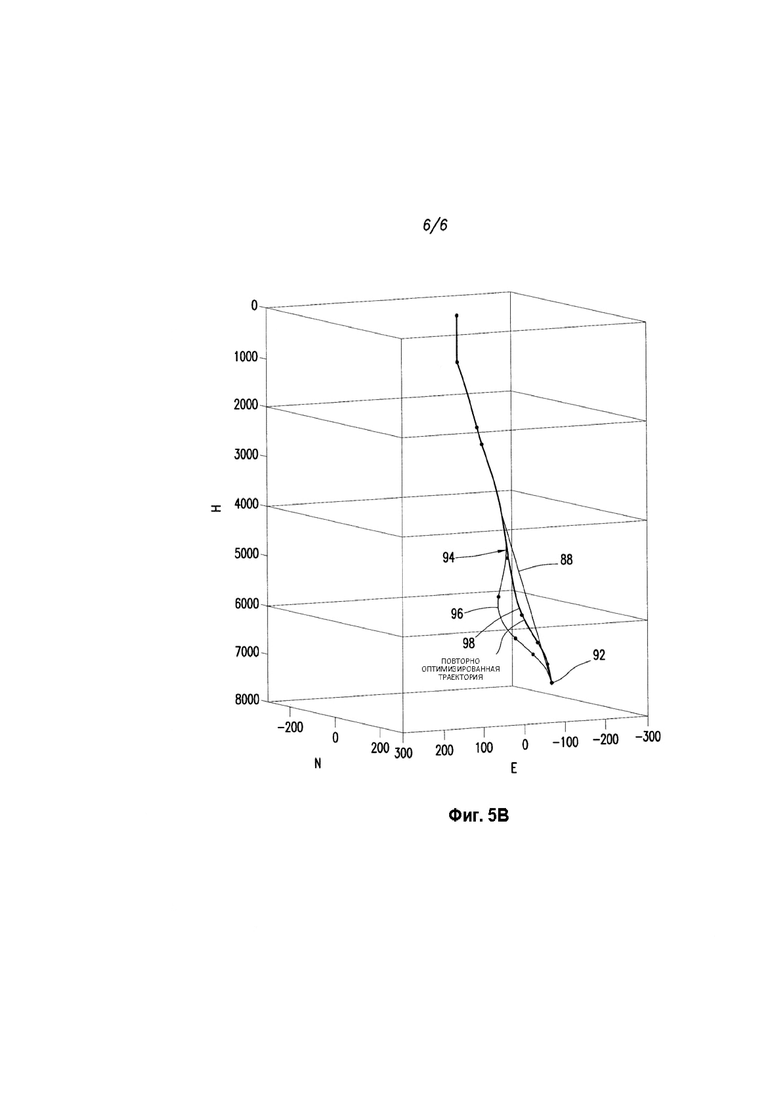
Фиг. 5B иллюстрирует пример реализации операции бурения с непрерывной оптимизацией по мере продвижения вниз сквозь породу к конечному участку.
ПОДРОБНОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Настоящее изобретение, в общем, относится к операциям бурения через подземные пласты и, более конкретно, к системам и способам управления бурением. В представленном далее описании изобретения предложена система, выполняющая автоматическое проектирование адаптивной оптимальной траектории бурения на основе данных геофизических исследований в реальном времени и прогнозирование траектории бурения на основе динамической модели. Указанная система может заменить бурильщика, осуществляющего бурение по предварительно разработанной проектной траектории бурения. Система может также автоматически вносить в проект изменения траектории бурения на основе текущего состояния процесса бурения, типов пласта, обновленной модели бурения, отклонений от траектории и другой информации таким образом, чтобы обеспечить оптимальное достижение конечного участка. Функция оптимизации затрат учитывает скважинные условия, износ и эффективность оборудования, ограничения, обусловленные входными данными, поступающими с поверхности, прогнозные данные траектории, полученные на основе модели, а также другие входные факторы, используемые для проектирования или внесения изменений в проект траектории, которые обеспечивают повышение эффективности бурения и снижение погонных затрат на фут проходки.
Некоторые примеры реализации настоящего изобретения могут быть осуществлены по меньшей мере частично с использованием системы обработки информации. Для целей настоящего изобретения система обработки информации может содержать средства или комплекс средств, выполненный с возможностью расчета, классификации, обработки, передачи, приема, извлечения, создания, коммутации, запоминания, отображения, демонстрации, обнаружения, регистрации, воспроизведения, перемещения или использования любой формы информации, аналитических данных или данных коммерческого и научного назначения, а также данных, предназначенных для управления, или других целей. Например, система обработки информации может представлять собой персональный компьютер, сетевое запоминающее устройство или любое другое подходящее устройство и может отличаться по размеру, структуре, производительности, функциональным характеристикам и цене. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или более ресурсов обработки, таких как центральный процессор (ЦП) или логика управления на основе аппаратного или программного обеспечения, постоянное запоминающее устройство (ПЗУ) и (или) энергонезависимую память других типов. Дополнительные компоненты системы обработки информации могут содержать один или более дисковых накопителей, один или более сетевых портов для обмена данными с внешними устройствами, а также различные устройства ввода-вывода (1/0), такие как клавиатура, мышь и видеодисплей. Система обработки информации может также содержать одну или более шин, выполненных с возможностью передачи данных между различными компонентами аппаратного обеспечения.
Некоторые примеры реализации настоящего изобретения могут быть осуществлены по меньшей мере частично с использованием постоянного машиночитаемого носителя. Для целей настоящего изобретения постоянный машиночитаемый носитель может содержать любое средство или комплекс средств, обеспечивающих хранение данных и/или команд в течение какого-либо интервала времени. Постоянный машиночитаемый носитель может содержать, например, среди прочего, носитель данных, такой как запоминающее устройство с прямым доступом (например, жесткий диск или дисковод гибких дисков), запоминающее устройство с последовательным доступом (например, накопитель на магнитной ленте), компакт-диск, ПЗУ на компакт-диске, DVD-диск, ОЗУ, ПЗУ, электрически-стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) и/или флэш-память, а также среду обмена данными, такую как провода, оптические волокна, сверхвысокочастотное излучение, радиоволны и другие электромагнитные и/или оптические среды передачи; и/или любые комбинации указанных сред.
Некоторые примеры реализации настоящего изобретения могут предусматривать автоматическое управление процессом бурения. Некоторые примеры реализации изобретения могут предусматривать принятие всех или части решений в процессе бурения и могут обеспечивать управление одним или более следующих компонентов: верхнего привода, буровой лебедки и насосов. Некоторые примеры реализации изобретения могут предусматривать оптимизацию процесса бурения и подачу командных входных сигналов на одну или более подсистем управления бурильной колонной. Данные оптимизации могут обновляться в зависимости от модели параметра бурения, которая может содержать, помимо прочего, модель бурового долота, изменяющуюся во времени. Некоторые примеры реализации изобретения могут обеспечить компенсацию нелинейности процесса бурения и устранить или уменьшить нелинейность в соответствии с необходимостью.
Фиг. 1A иллюстрирует пример буровой системы 2, не имеющий ограничительного характера, в соответствии с некоторыми вариантами реализации настоящего изобретения. Буровая система 2 может содержать буровую установку 4, расположенную над скважиной 6. Каротажное устройство 8 может быть перемещено блоком 10, обычно представляющем собой утяжеленную бурильную трубу, установленную в бурильную колонну 12 и помещенную в скважину 6. Буровое долото 14 может быть размещено на нижнем конце бурильной колонны 12 и пробуривает скважину 6 сквозь подземные пласты 16. Буровой раствор 18 может прокачиваться из резервуара 20 для бурового раствора, размещенного вблизи устья 22 скважины, вниз по продольному каналу (не показан) через бурильную колонну 12, выходить из отверстий бурового долота 14 и поступать обратно к поверхности через кольцевое пространство 23. Обсадная труба 24 может быть размещена в скважине 6 выше бурового долота 14 для сохранения целостности верхнего участка скважины 6.
Кольцевое пространство 23 между бурильной колонной 12, блоком 10 и боковыми стенками 26 скважины 6 может образовывать обратный канал для бурового раствора 18. Буровой раствор 18 может подаваться из резервуара 20 для бурового раствора, размещенного вблизи устья 22 скважины, насосной системой 28. Буровой раствор 18 может подаваться по трубопроводу 30 подачи бурового раствора, который может быть присоединен к центральному каналу, проходящему по всей длине бурильной колонны 12. Таким образом, буровой раствор 18 может подаваться вниз по бурильной колонне 12 и выходить в скважину 6 через отверстия в буровом долоте 14 для охлаждения и смазки бурового долота, а также транспортировки обломков выбуренной породы, полученных в процессе бурения, на поверхность. Трубопровод 32 возврата бурового раствора может быть соединен с кольцевым пространством 23 в устье 22 скважины для подачи возвратного потока бурового раствора 18 из скважины 6 в резервуар 20 для бурового раствора.
Каротажное устройство 8 может представлять собой любое известное каротажное устройство, такое как устройство акустического (иногда называется сонарным) каротажа, нейтронного каротажа, гамма-каротажа, плотностного каротажа, фотоэлектрического каротажа, ядерно-магнитного каротажа или любое другое известное устройство каротажа или комбинацию указанных устройств, которые могут использоваться для измерения литологических параметров и пористости пластов, окружающих скважину. Данные каротажа могут храниться в известном забойном регистраторе (не показан), доступ к которым может быть осуществлен на поверхности земли после извлечения бурильной колонны 12, или эти данные могут быть переданы на поверхность земли с использованием телеметрии, например, известных систем телеметрии посредством пульсаций бурового раствора. Данные каротажа, полученные от каротажного устройства 8, могут передаваться на процессор 34 измерительного устройства, расположенный на поверхности, для обеспечения обработки данных и использования в соответствии с примерами реализации изобретения, описанными в настоящем документе. Кроме устройств измерения в процессе бурения (ИПБ), могут также использоваться кабельные каротажные приборы. Кабельные каротажные приборы могут содержать любые известные каротажные инструменты, которые могут использоваться для измерения литологических параметров и/или пористости пластов, окружающих скважину, например, приборы акустического каротажа, нейтронного каротажа, гамма-каротажа, плотностного каротажа, фотоэлектрического каротажа, ядерно-магнитного каротажа или любые другие известные приборы каротажа либо комбинации указанных приборов, которые могут использоваться для измерения литологических параметров.
Система 36 обработки информации может быть любым приемлемым способом присоединена с возможностью обмена данными к одному или более компонентам буровой системы 2. Система 36 обработки информации может быть выполнена с возможностью реализации одного или более примеров реализации изобретения, описанных в настоящем документе. Система 36 обработки информации может содержать устройство, называемое в настоящем документе компьютером/контроллером 38, которое может содержать любой приемлемый компьютер, контроллер или устройство обработки данных, дополнительно программируемое для осуществления способа и реализации устройства, описанных далее в настоящем документе. Компьютер/контроллер 38 может содержать по меньшей мере один вход для приема входных данных и/или команд, например, от любого соответствующего устройства (или устройств) 44 ввода. Устройство (устройства) 44 ввода может содержать стандартную клавиатуру, дополнительную клавиатуру, указывающее устройство или аналогичные устройства и дополнительно может содержать сетевой интерфейс или другой интерфейс обмена данными для приема входных данных от удаленного компьютера или базы данных. Кроме того, компьютер/контроллер 38 может содержать по меньшей мере один выход для вывода сигналов данных и/или команд управления оборудованием. Выходные сигналы могут подаваться на дисплей 46 по линиям 40 передачи сигналов для формирования изображения на основе информации, содержащейся в выходных сигналах. Выходные сигналы могут также подаваться на печатающее устройство 48 для получения твердой копии 50 информации, содержащейся в выходных сигналах. Выходные сигналы 52, содержащие информацию и/или данные управления, могут также подаваться посредством любых соответствующих средств обмена данными, например, на любое устройство, предназначенное для управления одним или более различных рабочих параметров бурения буровой установки 4, как описано далее в настоящем документе. Другими словами, предлагается соответствующее устройство или средство управления определенным параметром в процессе фактического бурения скважины (или участка скважины) при помощи буровой системы в соответствии с некоторыми примерами реализации изобретения, описанными в настоящем документе. Например, буровая система 2 может содержать оборудование, такое как один из указанных далее типов управляемых двигателей: забойный двигатель 54, двигатель 56 системы верхнего привода или двигатель 58 стола ротора, для которого дополнительно может быть предусмотрено дистанционное управление для обеспечения заданной частоты вращения соответствующего двигателя. Указанный параметр может также содержать любой другой соответствующий параметр управления буровой системой, описанный в настоящем документе.
Компьютер/контроллер 38 может предоставлять средство для формирования геологической характеристики пласта на единицу глубины в соответствии с заданной моделью геологического строения. Компьютер/контроллер 38 может предусматривать вывод сигналов на линии 40, 42 передачи сигналов, представляющие геологические характеристики. Компьютер/контроллер 38 может быть запрограммирован на выполнения функций, описанных в настоящем документе, с использованием методов программирования, известных в данной области техники. Один из примеров реализации изобретения может содержать постоянный машиночитаемый носитель, содержащий записанную на нем программу. Программа, предназначенная для выполнения компьютером/контроллером 38, может использоваться для оптимизации параметра бурения бурильной колонны в соответствии с примерами реализации изобретения, описанными в настоящем документе. Программирование компьютерной программы для выполнения компьютером/контроллером 38 может дополнительно выполняться с использованием известных методов программирования, предназначенных для осуществления примеров реализации изобретения, описанных и рассмотренных в настоящем документе.
Компьютер/контроллер 38 может выполнять программу 60 автоматизированного бурения (например, фиг. 1B, 2 и т.д.). Программа 60 автоматизированного бурения может быть установлена, может функционировать и выполняться автономно на компьютере/контроллере 38 либо другой системе обработки информации. Фиг. 1B иллюстрирует общий пример основных элементов программы 60 автоматизированного бурения. В процессе выполнения программа 60 автоматизированного бурения может функционировать с использованием модуля 66 идентификации системы, модуля 68 функции оптимизации и модуля 64 реализации сжатого масштаба времени.
Модуль 66 идентификации системы может выполнять формирование модели траектории/динамических характеристик бурения на основании информации, собранной модулем 64, предоставляющим фактические данные, полученные в процессе бурения. Модуль 66 идентификации системы может функционировать как независимая система обработки информации, отдельная и удаленная от других систем обработки информации. Система обработки информации, функционирующая на основе модуля 66 идентификации системы, может осуществлять обмен данными с другими системами обработки информации с использованием любых приемлемых средств обмена данными. Приемлемыми средствами обмена данными могут быть, помимо прочего, любые средства беспроводного обмена данными и любые средства проводного обмена данными. В примерах реализации изобретения модуль 66 идентификации системы может функционировать как одна из множества системных программ, осуществляющих обмен данными с другими системными программами в пределах одной системы обработки информации. Модуль 66 идентификации системы может автоматически идентифицировать и выполнять калибровку модели динамических характеристик процесса бурения и модели траектории бурения на основании данных геофизических исследований/каротажа, входных данных, поступающих с поверхности (нагрузка на крюк, крутящий момент) и данных ИПБ в реальном времени. Модуль 66 идентификации системы предназначен для моделирования траектории/динамических характеристик бурения как функции входных данных, поступающих с поверхности, износа бурового долота и механики скальных пород, калибровка которых может осуществляться на основе данных геофизических исследований и данных ИПБ в реальном времени. Обновление модели может выполняться в реальном времени в процессе бурения и обновленная модель может быть адоптирована в модуле 68 функции оптимизации.
Модуль 68 функции оптимизации может учитывать измеренные/расчетные данные местоположения бурового долота и сравнивать их с текущим проектом траектории скважины. Будущая проектная траектория бурения может прогнозироваться с использованием модели, сформированной модулем 66 идентификации системы. При обнаружении отклонения в траектории бурения модуль 68 функции оптимизации может обновлять/рассчитывать оптимальную траекторию достижения конечного участка 92. Модуль 68 функции оптимизации может функционировать независимо и отдельно от модуля 66 идентификации системы, или модуль 68 функции оптимизации может входить в состав модуля 66 идентификации системы. Система обработки информации может обеспечивать выполнение и осуществлять поддержку модуля 68 функции оптимизации и модуля 66 идентификации системы. В дополнительных примерах реализации изобретения модуль 68 функции оптимизации может также обеспечивать функционирование системы обработки информации, которая может быть отдельной не связанной с другой системой обработки информации, обеспечивающей функционирование модуля 66 идентификации системы. Обе системы обработки информации могут осуществлять обмен данными друг с другом с использованием любого приемлемого средства обмена данными. Приемлемыми средствами обмена данными могут быть, помимо прочего, любые средства беспроводного обмена данными и любые средства проводного обмена данными. Траектория, выбранная модулем 68 функции оптимизации, может ограничиваться пользователем для учета специфических характеристик подземных пластов, выполняемых на поверхности операций и/или требований предупреждения пересечения траекторий скважин. Далее, модуль 68 функции оптимизации может выполнять расчет оптимальной начальной точки маневрирования буровым долотом (таким как буровое долото 14, проиллюстрированное на фиг. 1A), оптимального угла вхождения в пласты, оптимальной интенсивности искривления ствола/длины искривленного участка ствола и оптимальных входных данных операций, выполняемых на поверхности, таких как нагрузка на крюк, крутящий момент и производительность насосов. С учетом ограничений может быть получена комбинированная функция затрат в виде взвешенной суммы различных характеристик оптимизации. Функция затрат ( ) может быть представлена указанной ниже формулой:
) может быть представлена указанной ниже формулой:

где:
 – входные данные, поступающие с поверхности;
– входные данные, поступающие с поверхности;
 – скорость проходки;
– скорость проходки;
 – коэффициент рассеяния энергии;
– коэффициент рассеяния энергии;
 – износ долота;
– износ долота;
 – износ роторной управляемой системы;
– износ роторной управляемой системы;
 – производительность бурения
– производительность бурения 
 эффективность промывки скважины
эффективность промывки скважины 
 – взвешенная стоимость каждой статьи затрат;
– взвешенная стоимость каждой статьи затрат;
Количественное выражение геометрии траектории ( ) может включать, помимо прочего, затраты на траекторию бурения, желаемую пользователем. Например, пользователь может нуждаться в обеспечении минимального отклонения от проектной траектории или получении траектории с минимальным числом изгибов ствола скважины (например, максимальной длиной наклонно-прямолинейных участков) или минимальной интенсивностью искривления ствола либо комбинации указанных требований. Например, уравнение, которое можно использовать для получения минимального отклонения, может быть представлено следующим образом:
) может включать, помимо прочего, затраты на траекторию бурения, желаемую пользователем. Например, пользователь может нуждаться в обеспечении минимального отклонения от проектной траектории или получении траектории с минимальным числом изгибов ствола скважины (например, максимальной длиной наклонно-прямолинейных участков) или минимальной интенсивностью искривления ствола либо комбинации указанных требований. Например, уравнение, которое можно использовать для получения минимального отклонения, может быть представлено следующим образом:

где:  представляют координаты северной широты и восточной долготы, а также высоту, соответственно, а
представляют координаты северной широты и восточной долготы, а также высоту, соответственно, а  и
и  – первоначальный проект и обновленный проект траектории.
– первоначальный проект и обновленный проект траектории.
Пример уравнения, обеспечивающего получение минимального числа изгибов (то есть, увеличение длины наклонно-прямолинейных участков), может быть представлен следующим образом:
где:  – длина интервала наклонно-прямолинейного участка.
– длина интервала наклонно-прямолинейного участка.
В процессе оптимизации функции затрат несколько ограничений могут быть приняты во внимание. Например, входные данные могут иметь физические ограничения, которые принимаются в качестве набора ограничений оптимизации. Ограничения могут также быть установлены пользователем, который, например, определяет верхний и нижний пределы интенсивности искривления ствола или количества изгибов. Информация, используемая для обновления модели в модуле 66 идентификации системы или модуле 68 функции оптимизации, может быть получена от модуля 78 данных геофизических исследований/каротажа в расширенном масштабе времени или от модуля 64 реализации сжатого масштаба времени.
Во время бурения местоположение бурового долота может быть рассчитано по данным ИПБ с использованием алгоритма контроля при помощи модуля 64 реализации сжатого масштаба времени. Модуль 64 реализации сжатого масштаба времени может функционировать с использованием датчиков, установленных в буровой системе 2 для передачи программе 60 автоматизированного бурения информации, которая может предоставить программе 60 автоматизированного бурения возможность быстро изменить траекторию бурения. В результате сравнения расчетного местоположения бурового долота (может быть представлено с использованием координат северной широты, восточной долготы и высоты - N, E, H) с профилем, полученным модулем 68 функции оптимизации, могут быть определены требуемые параметры бурения/маневрирования в текущем местоположении бурового долота. Затем полученные параметры маневрирования могут быть автоматически реализованы при помощи локального контроллера 82 (например, фиг. 2), в то время, как параметры бурения переданы на поверхность. Поскольку могут передаваться только несколько параметров бурения, может использоваться очень узкая полоса частот. Задержка при передаче может быть компенсирована прогнозированием местоположения бурового долота. Прогнозирование местоположения бурового долота может осуществляться с использованием модели процесса бурения. Указанная модель может быть построена на основании физических данных, статистических данных или с использованием комбинации обоих типов данных. Изменение модели с использованием информации, предоставленной модулем 64 реализации сжатого масштаба времени, может обеспечить автоматическое обновление данных направления программы 60 автоматизированного бурения с переходом программы 60 автоматизированного бурения на оптимизированную траекторию для достижения требуемого конечного участка, такого как указанный конечный участок 92, рассмотренный далее со ссылкой на фиг. 6. Оптимизация траектории может осуществляться при обнаружении отклонения от траектории или при получении команды, касающейся выполнения повторной оптимизации. Модуль 66 идентификации системы может использовать информацию, полученную модулем 64 реализации сжатого масштаба времени, и формировать модель фактической траектории бурения. Оптимизация с использованием сформированной модели траектории бурения может повторяться с адаптацией относительно предшествующих этапов, пока программа 60 автоматизированного бурения не достигнет конечного участка. Оптимизация модели траектории бурения может выполняться автоматически с использованием компьютера/контроллера 38 (например, фиг. 1A), что может обеспечить значительное снижение затрат, связанных с бурением.
Фиг. 2 иллюстрирует подробную схему примера реализации программы 60 автоматизированного бурения. Как указано выше, программа 60 автоматизированного бурения может функционировать с использованием модуля 66 идентификации системы, модуля 68 функции оптимизации и модуля 64 реализации сжатого масштаба времени. Первоначально данные желаемой траектории бурения могут быть введены в компьютер/контроллер 38 (например, фиг. 1). Компьютер/контроллер 38 может сформировать модель фактической траектории бурения/динамических характеристик с использованием программы 60 автоматизированного бурения. Программа 60 автоматизированного бурения может оптимизировать желаемую траекторию бурения на основании сформированной модели, исходной требуемой траектории и ограничений, введенных в компьютер/контроллер 38. Оптимизированная траектория может быть автоматически запрограммирована в буровую систему 2 для осуществления бурения под поверхностью земли. Программа 60 автоматизированного бурения может дополнительно выполнять автоматическую калибровку модели траектории бурения/динамических характеристик для привязки к фактической траектории/процессу бурения. Во время бурения траектория может отклоняться от исходной проектной траектории, и отклонение может быть автоматически обнаружено программой 60 автоматизированного бурения. Алгоритм контроля может осуществлять прогнозирование местоположения бурового долота и траектории бурения. Затем программа 60 автоматизированного бурения может оптимизировать траекторию бурения на основании калиброванной модели и прогнозной траектории для достижения конечного участка без использования дополнительных ресурсов.
Программа 60 автоматизированного бурения может обрабатывать данные бурения в реальном времени, обеспечивая немедленную коррекцию траектории бурения в реальном времени. Надлежащая обработка информации в реальном времени может требовать, чтобы программа 60 автоматизированного бурения была разделена на два сегмента, соответствующих различным масштабам времени. Модуль 62 расширенного масштаба времени может функционировать почти в реальном времени, а модуль 64 сжатого масштаба времени может функционировать в реальном времени. Например, модуль 62 расширенного масштаба времени может обновлять данные через каждые тридцать футов (9,144 м) проходки, а модуль 64 сжатого масштаба времени может обновлять данные через каждый фут (0,3048 м) проходки. Следует отметить, что эти значения глубины являются произвольными и могут изменяться на основании требований пользователя или имеющегося бурового оборудования. В общем, модуль 64 сжатого масштаба времени осуществляет обновление данных с более высокой частотой, чем модуль 62 расширенного масштаба времени. Кроме того, глубина бурения может быть заменена временными интервалами. Например, модуль 62 расширенного масштаба времени может осуществлять обновление данных каждые десять секунд, а модуль 64 сжатого масштаба времени может осуществлять обновление данных каждую секунду. Интервалы времени и расстояния, через которые выполняется обновление данных программы 60 автоматизированного бурения, могут быть произвольными и определяются характеристиками подземных пластов, имеющейся у пользователя информацией об участке и текущими операциями бурения.
Во время выполнения операций бурения модуль 62 расширенного масштаба времени может выполнять различные функции, результаты которых могут использоваться в качестве входных и выходных данных оптимизированных операций бурения. На модуль 62 расширенного масштаба времени могут подаваться данные измерений от датчиков (не показаны), размещенных в буровой системе 2 и за ее пределами. Как указано на фиг. 1A, эти данные измерений могут передаваться на поверхность или могут быть получены, когда бурильная колонна 12 поднимается из скважины 6 для проведения обслуживания. Отдельные функции, выполняемые модулем 62 расширенного масштаба времени, могут содержать модуль 66 идентификации системы, модуль 68 функции оптимизации, модуль 74 данных управления оборудованием, расположенным на поверхности, модуль 76 оценки модели/расчета расхождений и модуль 78 данных каротажа/геофизических исследований. Начиная бурение, пользователь может определить требуемую траекторию бурения для буровой системы 2. В других примерах реализации изобретения пользователь может определить конечную точку, а проектирование траектории может быть выполнено программой 60 автоматизированного бурения. Выбранная траектория может быть задана в качестве входных данных компьютера/контроллера 38 (например, фиг. 1), который может выполнить моделирование траектории при помощи модуля 66 идентификации системы. Во время выполнения операций бурения модуль 66 идентификации системы может дополнительно обновлять модель траектории бурения/динамических характеристик. Однако в начале бурения модель бурения, сформированная модулем 66 идентификации системы, может быть передана в буровую систему 2, которая может начать выполнение операций бурения. В процессе бурения модуль 66 идентификации системы может постоянно получать входные данные от модуля 78 данных каротажа/геофизических исследований, модуля 84 ИПБ/алгоритма контроля, модуля 74 данных управления оборудованием, расположенным на поверхности, и модуля 76 оценки модели/расчета расхождений. Эти входные данные могут использоваться для автоматической калибровки и изменения траектории бурения, модели траектории бурения и/или модели динамических характеристик. Например, входные данные операций, выполняемых на поверхности, содержащие информацию, касающуюся интенсивности искривления ствола, торца долота и отклонения бурового долота от проекта, могут использоваться для обновления модели бурения. Отклонение бурового долота от проекта может быть обусловлено характеристиками пласта, типом и износом бурового долота, ориентацией траектории ствола, входными данными, поступающими с поверхности, и динамическими характеристиками компоновки низа бурильной колонны (КНБК). Кроме того, входные данные, поступающие с поверхности, могут содержать динамические характеристики бурового долота, характеристики вибрации и данные местоположения долота, данные износа долота и механики скальных пород. Модуль 66 идентификации системы предназначен для автоматического моделирования и калибровки данных траектории бурения/динамических характеристик в качестве функции от входных данных, поступающих с поверхности, износа бурового долота и механики скальных пород. Как указано на фиг. 1A, эти входные данные могут обеспечивать обновление исходной модели для определения местоположения элементов буровой системы 2 под поверхностью земли и сравнения с исходной моделью траектории. Эта информация может быть оценена модулем 76 оценки модели/расчета расхождений для определения совпадения текущего местоположения буровой системы 2 и исходной модели траектории.
Модуль 76 оценки модели/расчета расхождений может выполнять расчет расхождения между прогнозными значениями состояний, соответствующих обновленной модели, и входными данными, полученными от модуля 84 ИПБ/алгоритма контроля и модуля 78 данных каротажа/геофизических исследований. Для определения расхождений могут использоваться входные данные, содержащие информацию местоположения, ориентации, ускорения скважинного инструмента, данные характеристик пласта и прочая подобная информация. В результате может быть получено расхождение или величина ошибки.
Модуль 68 функции оптимизации может быть разделен на два отдельных модуля, реализующих различные функции: модуль 72 прогнозирования траектории бурения и модуль 70 оптимизации траектории. Модуль 72 прогнозирования траектории бурения может осуществлять сравнение входных данных, полученных от модуля 78 данных каротажа/геофизических исследований, и выходных данных модуля 70 оптимизации траектории. Оба набора данных могут использоваться для калибровки траектории бурения. Данные спрогнозированной траектории бурения могут содержать информацию, такую как расчетная скорость, расчетная частота вращения (об/мин), расчетная нагрузка на долото (НД) и спрогнозированное направление движения. Датчики (не показаны) могут использоваться для получения информации, требуемой для определения частоты вращения, нагрузки на долото и направления движения долота 14. Эта информация может быть передана на модуль 70 оптимизации траектории. На модуль 70 оптимизации траектории могут подаваться входные данные от модуля 74 данных управления оборудованием, расположенного на поверхности, и модуля 78 данных каротажа/геофизических исследований для формирования и/или обновления оптимизированной траектории на основании спрогнозированной траектории бурения и выбранного конечного участка 92. В проекте оптимизированной траектории могут также учитываться данные ограничений, полученные от модуля 74 данных управления оборудованием, расположенным на поверхности.
Фиг. 3 иллюстрирует графическое представление рабочих ограничений, расположенных на буровой системе 2. Ограничения, расположенные на буровой системе 2, могут быть обусловлены, помимо прочего, диапазонами частоты вращения, нагрузки на долото и предельной глубины по вертикали (ПГВ) бурового долота, в пределах которых может эксплуатироваться буровая система 2. Совместно эти ограничения могут формировать рабочее пространство 86, проиллюстрированное на фиг. 3. Эксплуатация в пределах рабочего пространства 86 может обеспечивать предотвращение избыточного износа, вибрации или отказа буровой системы 2. Для оптимизации траектории бурения, предусматривающей достижение конечного участка 92, модуль 70 оптимизации траектории может выполнить проектирование оптимальной траектории, ограниченной рабочим пространством 86. Например, если предельная глубина по вертикали буровой системы 2 составляет одну сотню футов (30,48 м) при нагрузке на долото, равной ста пятидесяти фунтам (68,0389 кг), то модуль 74 данных управления оборудованием, расположенным на поверхности, может выбрать соответствующую частоту вращения в пределах рабочего пространства 86 с использованием графика, проиллюстрированного на фиг. 3. Информация, касающаяся частоты вращения, нагрузки на долото и предельной глубины по вертикали буровой системы 2, может быть получена от датчиков, предусмотренных в буровой системе 2. Информация может передаваться от датчиков на модуль 74 данных управления оборудованием, расположенным на поверхности. Как проиллюстрировано на фиг. 2, модуль 74 данных управления оборудованием, расположенным на поверхности, может передавать информацию, полученную от датчиков, на модуль 66 идентификации системы и/или модуль 70 оптимизации траектории. Как указано выше, эта информация может использоваться для оптимизации и/или обновления траектории бурения буровой системой 2.
После оптимизации траектории модуль 70 оптимизации траектории может передавать данные оптимизированной траектории на компоненты модуля 64 сжатого масштаба времени. Компоненты модуля 64 сжатого масштаба времени могут содержать модуль 80 просмотровой таблицы проектного профиля, локальный контроллер 82 и модуль 84 ИПБ/алгоритма контроля. На модуль 80 просмотровой таблицы проектного профиля от модуля 70 оптимизации траектории могут подаваться данные оптимизированной траектории и дополнительно от модуля 84 ИПБ/алгоритма контроля могут поступать данные местоположения бурового долота 14. Данные местоположения бурового долота и оптимизированной траектории могут сравниваться, а затем полученные параметры маневрирования, используемые для размещения бурового долота 14 на оптимизированной траектории, могут передаваться на локальный контроллер 82. Кроме того, модуль 80 просмотровой таблицы проектного профиля может выполнять обновление и/или дополнение параметров бурения в модуле 74 данных управления оборудованием, расположенным на поверхности. Эти параметры могут приводить к изменению рабочего пространства 86, определенного модулем 74 данных управления оборудованием, расположенным на поверхности, которое может обеспечивать дальнейшую оптимизацию траектории бурения в результате каждого цикла оптимизации траектории бурения.
Локальный контроллер 82 может осуществлять управление направлением бурения буровой системы 2. Получая входные данные от модуля 80 просмотровой таблицы проектного профиля, локальный контроллер 82 может осуществлять маневрирование буровой системы 2 по оптимизированной траектории. Данные обратной связи от датчиков буровой системы 2 могут подаваться на локальный контроллер 82, обеспечивая локальному контроллеру 82 возможность осуществления маневрирования буровой системы 2 по оптимизированной траектории. Направление, местоположение, скорость, частота вращения, нагрузка на долото и предельная глубина по вертикали могут, соответственно, регистрироваться и обновляться модулем 84 ИПБ/алгоритма контроля и модулем 78 данных каротажа/геофизических исследований. Вся обновленная информация может повторно проходить через программу 60 автоматизированного бурения, обеспечивая непрерывную оптимизацию программой 60 автоматизированного бурения траектории бурения по мере продвижения к конечному участку 92. Оптимизация может обеспечивать снижение программой 60 автоматизированного бурения затрат, времени, материалов и ошибок бурения.
Далее, фиг. 4 иллюстрирует, каким образом осуществляется снижение затрат на бурение. Фиг. 4 иллюстрирует вид в перспективе проектной траектории бурения и фактической траектории бурения, причем фактическая траектория бурения обеспечивается известными способами в результате действий оператора. Известная система бурения может требовать наличия у оператора многолетнего опыта, чтобы обеспечить бурение буровой системой 2 по проектной траектории 88 к конечному участку 92. Поскольку буровая система 2 сдвигается и перемещается вследствие изменений характеристик пласта, вибрации скважинного оборудования и вращения бурового долота оператор должен вручную возвращать буровое долото 14 на проектную траекторию 88. Опыт играет важную роль в обеспечении способности оператора успешно возвращать буровую систему 2 на проектную траекторию 88. Фиг. 4 иллюстрирует траекторию 90, полученную при управлении вручную, в сравнении с проектной траекторией 88. Как проиллюстрировано на фигуре, траектория 90, полученная при управлении вручную, может часто изменять направление и иметь множество изгибов и поворотов, поскольку оператор маневрирует, чтобы возвратить буровую систему 2 на проектную траекторию 88. Изгибы и повороты увеличивают длину ствола скважины, в результате этого повышаются затраты и время, требуемое для достижения конечного участка 92. Хотя траектория 90, полученная при управлении вручную, возможно, имеет меньше изменений направления, чем траектории, выполненные другими способами, траектория 90, полученная при управлении вручную, в процессе бурения до конечного участка 92, по-видимому, потребует значительного числа операций корректировки. Очевидно, что траектория 90, полученная при управлении вручную, которая проиллюстрирована на фиг. 4, является гипотетической, но она представлена для иллюстрации сложности точного следования буровой системы 2 по проектной траектории 88.
Фиг. 5 иллюстрирует ситуацию оптимизации траектории, предусматривающую минимальное число поворотов/частоту операций маневрирования. Фиг. 5A и 5B иллюстрируют программу 60 автоматизированного бурения, управляющую буровой системой 2 (например, фиг. 1), выполняющей бурение по проектной траектории 88 к конечному участку 92. Траектория 94, сформированная программой автоматизированного бурения, иллюстрирует направление бурения буровой системы 2, находящейся под управлением программы 60 автоматизированного бурения. На фиг. 5A траектория 94, сформированная программой автоматизированного бурения, начинает отклоняться от проектной траектории 88. Вследствие возникновения отклонения программа 60 автоматизированного бурения может выполнить оптимизацию для получения первой оптимизированной траектории 96, которая может быть реализована буровой системой 2 для достижения конечного участка 92. По мере бурения буровой системой 2 по первой оптимизированной траектории 96, программа 60 автоматизированного бурения снова выполняет оптимизацию траектории бурения на основании текущих условий и параметров. Как проиллюстрировано на фиг. 5B, в результате оптимизации выполняется формирование и моделирование программой 60 автоматизированного бурения второй оптимизированной траектории 98. Далее, буровая система 2 с использованием программы 60 автоматизированного бурения может быть переведена на вторую оптимизированную траекторию 98. Вторая оптимизированная траектория 98 может использоваться как окончательная траектория бурения до конечного участка 92. В процессе бурения система 60 автоматизированного бурения может многократно выполнять оптимизацию проектной траектории 88. Оптимизация ведет к снижению затрат, времени и материалов, используемых для достижения конечного участка 92.
Способ выполнения программы автоматизированного бурения может включать бурение по направлению к конечному местоположению по траектории бурения, обновление модели траектории бурения на основании по меньшей мере данных, полученных во время выполнения этапа бурения по направлению к конечному местоположению, формирование измененной траектории бурения по направлению к конечному местоположению на основании по меньшей мере указанной модели траектории бурения в реальном времени в процессе выполнения этапа бурения по направлению к конечному местоположению по указанной траектории бурения и бурение по направлению к конечному местоположению по измененной траектории бурения. Указанный способ может дополнительно включать формирование измененной траектории бурения, ограниченной рабочим пространством. Рабочее пространство может быть ограничено факторами, включающими, среди прочего, нагрузку на долото, число оборотов в минуту и предельную глубину по вертикали. Указанный способ может дополнительно включать сравнение указанной траектории бурения с исходной траекторией бурения. На этапе сравнения указанной траектории бурения с исходной траекторией бурения может быть получена ошибка. Если ошибка превышает заданное значение, то может быть сформирована измененная траектория бурения. Этапы обновления модели траектории бурения и формирования измененной траектории бурения могут непрерывно повторяться в процессе бурения по направлению к конечному местоположению. Измененная траектория бурения может формироваться на основании сравнения текущего местоположения бурового долота и предполагаемого местоположения бурового долота на исходной траектории бурения.
Система автоматизированного бурения может содержать буровой снаряд, содержащий буровую установку, бурильную колонну или буровое долото. Система автоматизированного бурения может дополнительно содержать систему обработки информации, связанную с буровым снарядом, причем система обработки информации может содержать программу автоматизированного бурения, которая может быть выполнена с возможностью обновления модели траектории бурения на основании по меньшей мере данных, полученных от бурового снаряда, и формирования измененной траектории бурения по направлению к конечному местоположению на основании по меньшей мере модели траектории бурения в реальном времени в процессе бурения буровым снарядом по направлению к конечному местоположению. Указанная модель траектории бурения может содержать функцию оптимизации, содержащую функцию прогнозирования траектории бурения и функцию оптимизации траектории. Указанная функция прогнозирования траектории бурения может выполнять сравнение входных данных каротажа и/или геофизических исследований и выходных данных оптимизации траектории. Указанная функция прогнозирования траектории бурения может предоставлять информацию, касающуюся скорости движения бурового долота, числа оборотов бурового долота в минуту, нагрузки на долото или направления перемещения долота. Указанный буровой снаряд может дополнительно содержать датчики, связанные с системой обработки информации с возможностью обмена данными. Указанная программа автоматизированного бурения может содержать по меньшей мере одно из: функцию оценки модели, модуль идентификации системы, функцию управления оборудованием, расположенным на поверхности, функцию каротажа или функцию оптимизации. Указанная функция оптимизации может содержать функцию оптимизации траектории или функцию прогнозирования траектории бурения. Указанная функция прогнозирования траектории бурения может использовать множество датчиков, установленных на буровом снаряде, для определения местоположения долота бурового снаряда. Указанная функция прогнозирования траектории бурения может формировать модель новой траектории на основании текущего местоположения бурового долота в сравнении с предполагаемым местоположением бурового долота на исходной моделированной траектории, при этом оптимизация траектории может ограничиваться рабочим пространством. Указанное рабочее пространство может определяться нагрузкой на долото, числом оборотов в минуту или предельной глубиной по вертикали. Указанная функция оптимизации может выполнять расчет оптимальной траектории бурения по направлению к конечному местоположению, содержащей оптимальную начальную точку для маневрирования долотом бурового снаряда. Указанная система может дополнительно содержать локальный контроллер, который может осуществлять управление бурильной колонной и ориентировать буровое долото по направлению к конечному участку на основании модели траектории бурения.
Таким образом, настоящее изобретение обеспечивает эффективное достижение целей и осуществление указанных, а также непосредственно присущих ему преимуществ. Конкретные примеры реализации изобретения, рассмотренные выше, представлены только для иллюстрации, поскольку в настоящее изобретение могут быть внесены изменения, и изобретение может быть реализовано различными, но эквивалентными способами, очевидными для специалистов в данной области техники, которые ознакомятся с настоящим документом. Хотя были рассмотрены конкретные примеры реализации, настоящее изобретение охватывает все комбинации указанных примеров. Кроме того, представленные в настоящем документе детали структуры или конструкции ограничиваются только указанной далее формулой изобретения. Таким образом, очевидно, что в конкретные иллюстративные примеры реализации, рассмотренные выше, могут быть внесены дополнения и изменения, находящиеся в пределах объема и сущности настоящего изобретения. Все значения и диапазоны, указанные выше, могут изменяться на некоторую величину. Любой указанный диапазон численных значений, имеющий нижний и верхний пределы, охватывает любое значение и любой диапазон, находящиеся в пределах указанного диапазона. Далее, указание единственного числа в формуле изобретения охватывает один или более соответствующих указанных элементов. Кроме того, термины, использованные в формуле изобретения, имеют обычное общепринятое значение, за исключением случаев явного и четкого определения терминов патентообладателем. В случае наличия расхождений при использовании слова или термина в настоящем описании и одном или более патентов или других документов, включенных в настоящий документ посредством ссылки, для целей полного понимания настоящего изобретения следует использовать определения, соответствующие настоящему описанию изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЕНИЕ КОМПЛЕКСАМИ БУРЕНИЯ СТВОЛА СКВАЖИНЫ | 2013 |
|
RU2640607C1 |
| УЛУЧШЕННАЯ ОЦЕНКА ИСКРИВЛЕНИЯ СТВОЛА СКВАЖИНЫ, ОСНОВАННАЯ НА РЕЗУЛЬТАТАХ ИЗМЕРЕНИЙ ИЗГИБАЮЩЕГО МОМЕНТА ИНСТРУМЕНТА | 2016 |
|
RU2663653C1 |
| УСТРАНЕНИЕ СКАЧКООБРАЗНЫХ КОЛЕБАНИЙ БУРОВОГО СНАРЯДА | 2013 |
|
RU2638072C2 |
| АВТОМАТИЗАЦИЯ БУРЕНИЯ СКВАЖИН С ИСПОЛЬЗОВАНИЕМ ПРОФИЛЯ ЭНЕРГИИ И ФОРМЫ СТВОЛА СКВАЖИНЫ | 2013 |
|
RU2642898C2 |
| СПОСОБЫ И СИСТЕМЫ МОДЕЛИРОВАНИЯ УСОВЕРШЕНСТВОВАННОЙ ТРЕХМЕРНОЙ КОМПОНОВКИ НИЗА БУРИЛЬНОЙ КОЛОННЫ | 2014 |
|
RU2679151C1 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ПЛАНИРОВАНИЯ И ДИНАМИЧЕСКОГО ОБНОВЛЕНИЯ ОПЕРАЦИЙ ОТБОРА ПРОБ ВО ВРЕМЯ БУРЕНИЯ В ПОДЗЕМНОМ ПЛАСТЕ | 2009 |
|
RU2502870C2 |
| ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНЫХ ПАРАМЕТРОВ ДЛЯ ЗАБОЙНОЙ ОПЕРАЦИИ | 2012 |
|
RU2588526C2 |
| СИСТЕМА И СПОСОБ ВЫПОЛНЕНИЯ БУРОВЫХ РАБОТ НА НЕФТЯНОМ МЕСТОРОЖДЕНИИ С ИСПОЛЬЗОВАНИЕМ СПОСОБОВ ВИЗУАЛИЗАЦИИ | 2008 |
|
RU2452855C2 |
| Способ управления бурением скважин с автоматизированной системой оперативного управления бурением скважин | 2018 |
|
RU2701271C1 |
| ОПТИМИЗИРОВАННАЯ ДОБЫЧА ПОСРЕДСТВОМ ГЕОЛОГИЧЕСКОГО КАРТИРОВАНИЯ | 2015 |
|
RU2661956C1 |
Изобретение относится к способу и системе оптимизации траектории бурения от поверхности земли до конечного участка, расположенного под поверхностью. Техническим результатом является повышение эффективности процессов бурения. Способ включает бурение по направлению к конечному местоположению по траектории бурения, обновление модели траектории бурения на основании по меньшей мере данных, полученных на этапе бурения по направлению к конечному местоположению, формирование измененной траектории бурения по направлению к конечному местоположению на основании по меньшей мере указанной модели траектории бурения в реальном времени во время выполнения этапа бурения по направлению к конечному местоположению по указанной траектории бурения и бурение по направлению к конечному местоположению по указанной измененной траектории бурения, причем формирование измененной траектории бурения ограничено рабочим пространством, которое обновляют по меньшей мере на основании данных, полученных на этапе бурения по направлению к конечному местоположению. 2 н. и 17 з.п. ф-лы, 5 ил.
1. Способ выполнения программы автоматизированного бурения, включающий следующие этапы:
выполняют бурение по направлению к конечному местоположению по траектории бурения;
обновляют модель траектории бурения на основании по меньшей мере данных, полученных на этапе бурения по направлению к конечному местоположению;
формируют измененную траекторию бурения по направлению к конечному местоположению на основании по меньшей мере указанной модели траектории бурения в реальном времени во время выполнения этапа бурения по направлению к конечному местоположению по указанной траектории бурения; и
выполняют бурение по направлению к конечному местоположению по указанной измененной траектории бурения;
причем формирование измененной траектории бурения ограничено рабочим пространством, которое обновляют по меньшей мере на основании данных, полученных на этапе бурения по направлению к конечному местоположению.
2. Способ по п. 1, отличающийся тем, что указанное рабочее пространство определено ограничениями, включающими нагрузку на долото, число оборотов в минуту и предельную глубину по вертикали.
3. Способ по любому из предшествующих пунктов, дополнительно включающий этап, в котором проводят сравнение указанной траектории бурения с исходной траекторией бурения.
4. Способ по п. 3, отличающийся тем, что в результате сравнения указанной траектории бурения с исходной траекторией бурения выявляется ошибка.
5. Способ по п. 4, отличающийся тем, что формирование указанной измененной траектории бурения выполняют при превышении указанной ошибкой заданного значения.
6. Способ по любому из предшествующих пунктов, отличающийся тем, что этапы обновления модели траектории бурения и формирования измененной траектории бурения непрерывно повторяют в процессе бурения по направлению к конечному местоположению.
7. Способ по любому из предшествующих пунктов, отличающийся тем, что указанную измененную траекторию бурения формируют на основании сравнения текущего местоположения бурового долота и предполагаемого местоположения бурового долота на исходной траектории бурения.
8. Система автоматизированного бурения, содержащая:
буровой снаряд, содержащий буровую установку, бурильную колонну и буровое долото; и
систему обработки информации, связанную с указанным буровым снарядом, причем указанная система обработки информации содержит программу автоматизированного бурения, выполненную с возможностью обновления модели траектории бурения на основании по меньшей мере данных, полученных от указанного бурового снаряда, и формирования измененной траектории бурения по направлению к конечному местоположению на основании по меньшей мере указанной модели траектории бурения в реальном времени в процессе бурения указанным буровым снарядом по направлению к конечному местоположению, причем формирование измененной траектории бурения ограничено рабочим пространством, которое обновляют по меньшей мере на основании данных, полученных от бурового снаряда.
9. Система по п. 8, отличающаяся тем, что указанная модель траектории бурения содержит функцию оптимизации, содержащую функцию прогнозирования траектории бурения и функцию оптимизации траектории.
10. Система по п. 9, отличающаяся тем, что указанная функция прогнозирования траектории бурения выполняет сравнение входных данных каротажа и/или геофизических исследований и выходных данных оптимизации траектории.
11. Система по п. 9 или 10, отличающаяся тем, что указанная функция прогнозирования траектории бурения предоставляет информацию, касающуюся скорости движения бурового долота, числа оборотов бурового долота в минуту, нагрузки на долото и направления перемещения долота.
12. Система по любому из пп. 9-11, отличающаяся тем, что указанный буровой снаряд дополнительно содержит датчики, связанные с указанной системой обработки информации с возможностью обмена данными.
13. Система по любому из пп. 9-12, отличающаяся тем, что указанная программа автоматизированного бурения содержит по меньшей мере одно из: функцию оценки модели, модуль идентификации системы, функцию управления оборудованием, расположенным на поверхности, функцию каротажа или функцию оптимизации.
14. Система по п. 13, отличающаяся тем, что указанная функция оптимизации содержит функцию оптимизации траектории и функцию прогнозирования траектории бурения.
15. Система по п. 14, отличающаяся тем, что указанная функция прогнозирования траектории бурения использует множество датчиков, предусмотренных на указанном буровом снаряде, для определения местоположения бурового долота указанного бурового снаряда.
16. Система по п. 14, отличающаяся тем, что указанная функция прогнозирования траектории бурения формирует модель новой траектории на основании текущего местоположения указанного бурового долота в сравнении с предполагаемым местоположением бурового долота на исходной моделированной траектории, при этом оптимизация траектории ограничивается рабочим пространством.
17. Система по п. 16, отличающаяся тем, что указанное рабочее пространство определяется нагрузкой на долото, числом оборотов в минуту и предельной глубиной по вертикали.
18. Система по любому из пп. 13-17, отличающаяся тем, что указанная функция оптимизации выполняет расчет оптимальной траектории бурения по направлению к конечному местоположению, содержащей оптимальную начальную точку для маневрирования буровым долотом указанного бурового снаряда.
19. Система по любому из пп. 9-18, дополнительно содержащая локальный контроллер, осуществляющий управление указанной бурильной колонной и ориентирование указанного бурового долота по направлению к конечному участку на основании указанной модели траектории бурения.
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО И СПОСОБЫ ДЛЯ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ | 2008 |
|
RU2471980C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ВЫПОЛНЕНИЯ ОПЕРАЦИИ БУРЕНИЯ НА МЕСТОРОЖДЕНИИ | 2008 |
|
RU2436947C2 |
| US 6109368 A1, 29.08.2000 | |||
| US 20040028476 A1, 12.02.2004. | |||

