Данная заявка заявляет притязание на приоритет немецкой заявки на патент №10 2013 109 392.2, поданной 29 августа 2013 г., содержание которой включено в настоящем документе посредством ссылки.
Область изобретения
Данное изобретение относится к выполненному с возможностью вертикального взлета летательному аппарату, подобному, например, трикоптеру или квадрокоптеру.
Предпосылки создания изобретения
Для многих приложений является желательным иметь в распоряжении летательный аппарат, который может стартовать с минимально малой поверхности и, таким образом, например, не нуждается в каком-либо специальном аэродроме большой площади. Кроме того, имеется потребность в летательном аппарате для особых целей использования, который является поворотливым и способен точно маневрировать, и который, предпочтительно, способен висеть в воздухе и иметь при этом хорошие летные характеристики в режиме висения.
Например, для воздушного мониторинга и авиаразведки применяют летательные аппараты, которые должны висеть в воздухе над интересующей целью и способны при этом, например, делать аэрофотоснимки. В альтернативном приложении выполненному с возможностью вертикального взлета летательный аппарат, иногда называемый также VTOL (самолет вертикального взлета и посадки), может быть применен для подлета в труднодоступные для людей или для иных машин области, например, в рамках миссий по предупреждению чрезвычайных ситуаций и ликвидации их последствий, с целью транспортировки в такие области, например, таких грузов, как инструменты, продукты питания или медикаменты.
В том числе для таких использований разрабатывались летательные аппараты, в которых по меньшей мере три, а предпочтительно четыре или более, оснащенных воздушным винтом и приводящим его в движение двигателем несущего винта в каждом случае обеспечивают направленное по существу вертикально вверх тяговое усилие, для предоставления таким образом летательному аппарату возможности вертикального подъема или же зависания в воздухе. Снабженный четырьмя такими несущими винтами летательный аппарат также называют четырехвинтовым вертолетом, квадрокоптером, квадрикоптером, квадронесущим винтом или летающей платформой. В общем, такие летательные аппараты с более чем тремя обеспечивающими подъемную силу несущими винтами называют мультикоптерами, причем, наряду с квадрокоптерами, также являются употребительными варианты с тремя несущими винтами (трикоптер), шестью несущими винтами (гексакоптер) или восемью несущими винтами (октокоптер). Такие летательные аппараты приводятся в действие в большинстве случаев беспилотным способом и, в соответствии с этим, могут быть выполнены малыми. В отдельных случаях, эти летательные аппараты называют также дронами.
За счет небольшого наклона всего летательного аппарата или же одного или нескольких несущих винтов относительно горизонтали, в таких летательных аппаратах также может быть обеспечена определенная движущая сила за счет наклоненного относительно вертикали созданного несущими винтами тягового усилия. Разумеется, досягаемые крейсерские скорости полета в результате появляющихся у этого типа летательных аппаратов физических граничных условий, таким образом, ограничены относительно незначительными скоростями, обычно менее 200 км/ч, зачастую также менее 100 км/ч. Такое ограничение скорости получается, например, как следствие того физического граничного условия, что применяемые для создания подъемной силы воздушные винты приводятся в действие с высокими скоростями вращения, и поэтому, перемещающаяся вперед в направлении направления полета летательного аппарата лопасть воздушного винта уже при относительно низких крейсерских скоростях полета должна перемещаться, по меньшей мере, на своих вершинах лопасти воздушного винта почти со скоростью звука, вследствие чего возникают высокое сопротивление воздуха и сильный шум.
Поэтому обычные мультикоптеры хотя и имеют, подобно вертолетам, у которых только единственный несущий винт обеспечивает необходимую подъемную силу, а сложная механическая часть несущего винта совместно с хвостовым винтом может применяться для маневрирования вертолета, хорошие летные характеристики в режиме висения, но достигают, как правило, только относительно незначительных крейсерских скоростей полета.
В KR 1020120060590 А описывается квадрокоптер, который может вертикально взлетать и приземляться, и в котором можно изменять направление тягового усилия воздушных винтов для обеспечения, таким образом, возможности создания не только подъемной силы, но и движущей силы для квадрокоптера.
Сущность изобретения
В качестве лежащей в основе данного изобретения цели может быть рассмотрено предоставление летательного аппарата, который делает возможными как хорошие летные характеристики в режиме висения, так и высокие крейсерские скорости полета.
Такая цель может быть достигнута летательным аппаратом согласно основному пункту формулы изобретения. Выгодные варианты осуществления изобретения заданы в зависимых пунктах формулы изобретения, а также в последующем описании.
Согласно одному аспекту данного изобретения предлагается летательный аппарат, который имеет несущую конструкцию, крыльевую конструкцию, по меньшей мере три подъемных несущих винта и по меньшей мере один тяговый привод. При этом крыльевая конструкция закреплена на несущей конструкции. Крыльевая конструкция выполнена для создания подъемной силы для летательного аппарата при горизонтальном перемещении летательного аппарата, и имеет для этого по меньшей мере одну несущую поверхность, которая снабжена создающим динамическую подъемную силу профилем. Каждый из подъемных несущих винтов закреплен на несущей поверхности. При этом каждый несущий винт имеет воздушный винт и выполнен для создания посредством вращения воздушного винта действующей в вертикальном направлении подъемной силы для летательного аппарата. Тяговый привод выполнен для создания действующей на несущую конструкцию в горизонтальном направлении силы тяги.
Кратко резюмируя, лежащая в основе изобретения идея может, в том числе, состоять в оснащении летательного аппарата в форме мультикоптера, с одной стороны, по меньшей мере тремя подъемными несущими винтами, которые создают вертикальное тяговое усилие, с помощью которого летательный аппарат вертикально взлетает и приземляется, а также может висеть в воздухе, и в предоставлении дополнительно, с другой стороны, тягового привода, который может создавать действующее в горизонтальном направлении тяговое усилие таким образом, что летательный аппарат может ускоряться независимо от подъемных несущих винтов до высокой крейсерской скорости полета, после того, как несущие винты были отключены. Дополнительно, летательный аппарат снабжается крыльевой конструкцией, в которой по меньшей мере одна несущая поверхность обеспечивает создание динамической подъемной силы, когда летательный аппарат ускорился до достаточно высокой крейсерской скорости полета.
При этом несущая поверхность или же несущие поверхности крыльевой конструкции предпочтительно наделены такими размерами, что они могут самостоятельно обеспечивать при достигаемых летательным аппаратом крейсерских скоростях полета создание достаточной для летательного аппарата подъемной силы и, таким образом, позволяют отказаться при крейсерской скорости полета от создаваемой посредством подъемных несущих винтов подъемной силы.
В соответствии с изобретением по меньшей мере одна несущая поверхность установлена с возможностью поворота или вращения относительно несущей конструкции вокруг нормальной оси (оси рыскания) летательного аппарата для изменения угла между передней кромкой по меньшей мере одной несущей поверхности и поперечной осью летательного аппарата. Это позволяет поворачивать несущие поверхности, например, на несущей конструкции или же на фюзеляже таким образом, что во время состояния полета в режиме висения или же при полете в режиме висения они находятся в повернутом состоянии, а во время крейсерского полета - в повернутом в исходное положение состоянии. При этом посредством разворачивания несущих поверхностей стреловидность крыльевой конструкции увеличивается, а посредством сворачивания стреловидность уменьшается. При этом стреловидность описывает угол между передней кромкой соответствующей несущей поверхности и поперечной осью летательного аппарата. В отношении к направлению полета следует различать между отрицательной стреловидностью, то есть отклоненными вперед несущими поверхностями, и положительной стреловидностью, то есть отклоненными назад несущими поверхностями. Это соотношение еще более подробно разъясняется в описании чертежей.
Благодаря изменяемой стреловидности несущих поверхностей в вертикальном полете несущие поверхности могут быть повернуты ближе к фюзеляжу, а в горизонтальном полете могут быть повернуты дальше от фюзеляжа, что в последнем случае увеличивает размах несущих поверхностей. Этим достигается дополнительное улучшение летных характеристик как в вертикальном, так и в горизонтальном полете, так как размах несущих поверхностей выгодно адаптируется к соответствующему режиму, т.е. устанавливается на меньшее значение для вертикального полета и на большее значение для горизонтального полета.
Далее, на несущей конструкции установлена с возможностью поворота вокруг нормальной оси летательного аппарата вторая несущая поверхность, причем по меньшей мере одна несущая поверхность и вторая несущая поверхность для полета в режиме висения находятся в повернутом состоянии.
Могут быть предусмотрены и другие конфигурации летательного аппарата с тремя несущими поверхностями или с парами несущих поверхностей. Несущие поверхности могут быть соединены друг с другом также посредством соединительных структур или соединительных элементов, как это происходит, например, в летательных аппаратах с кольцевым крылом. При этом на соединительных структурах или соединительных элементах могут быть закреплены воздушные винты посредством консолей или же гондол.
Предпочтительным образом, воздушные винты закреплены на несущих поверхностях, несущей конструкции, консолях, соединительных структурах, соединительных элементах или гондолах.
Летательный аппарат согласно изобретению, который снабжен комбинацией по меньшей мере из трех подъемных несущих винтов и по меньшей мере одного тягового привода, а также согласованно выполненной крыльевой конструкцией, может иметь как требуемые хорошие летные характеристики в режиме висения, так и достигать высоких крейсерских скоростей полета. Подъемные несущие винты при этом могут, например, при взлете или посадке или при полете в режиме висения, то есть при недостающей или незначительной горизонтальной скорости летательного аппарата обеспечивать создание необходимой подъемной силы. Независимо от подъемных несущих винтов тяговый привод может ускорять летательный аппарат в горизонтальном направлении, причем при достаточно высоких горизонтальных скоростях созданная посредством по меньшей мере одной несущей поверхности крыльевой конструкции динамическая подъемная сила может быть достаточно высокой для несения летательного аппарата.
При этом отдельные компоненты предложенного летательного аппарата могут быть выполнены и могут управляться относительно просто. Прежде всего, подъемные несущие винты могут быть выполнены таким образом, что плоскость вращения, в которой вращаются лопасти винта подъемного несущего винта, является стационарной по отношению к приводимой в действие двигателем оси несущего винта подъемного несущего винта.
Другими словами, подъемные несущие винты летательного аппарата могут быть построены механически простыми и, например, простой воздушный винт может быть соединен непосредственно с приводимой в действие двигателем осью. Прежде всего, не является необходимым соединение лопастей винта подъемного несущего винта с приводимой в действие двигателем осью несущего винта с помощью сложной механической части, такой как, например, автомат перекоса в вертолете. Прежде всего, не является необходимым изменение угла атаки или угла наклона отдельных лопастей винта во время оборота несущего винта для создания тем самым движущей силы летательного аппарата, поперечного наклона, тангажа или изменения курса летательного аппарата. Вместо этого в предложенном летательном аппарате движущая сила может быть создана с помощью дополнительного тягового привода. Поперечный наклон, тангаж или же изменение курса летательного аппарата может осуществляться посредством изменения созданных в каждом случае, в общем, по меньшей мере четырьмя подъемными несущими винтами подъемных сил.
В особо простом варианте осуществления лопасти воздушного винта подъемного несущего винта могут быть неподвижно соединены с осью несущего винта. Снабженный таким образом неподвижными лопастями воздушный винт не имеет подвижных частей. За счет этого он выполнен прочным, и не требует, например, механической части или системы управления для обеспечения возможности управления переменным расположением лопастей воздушного винта. Воздушный винт может быть, прежде всего, цельным. Созданная таким, просто построенным подъемным несущим винтом подъемная сила преимущественно зависит от скорости вращения или числа оборотов, с которым воздушный винт приводится в действие, и может тем самым управляться просто посредством подходящего управления приводным двигателем.
Альтернативно, несущий винт может быть выполнен более сложным, и лопасти воздушного винта подъемного несущего винта могут быть с возможностью поворота соединены с осью несущего винта таким образом, что наклон лопастей воздушного винта может быть изменен.
Другими словами, угол, который образуют лопасти воздушного винта с плоскостью вращения, в которой вращаются лопасти воздушного винта, может быть изменен. При этом такое изменение наклона лопастей воздушного винта, предпочтительно, может быть осуществлено совместно для всех лопастей воздушного винта. Прежде всего, изменение наклона лопастей воздушного винта может производиться независимо от настоящего положения вращающихся лопастей воздушного винта, то есть лопасти воздушного винта в отличие от случая с автоматом перекоса в вертолете, не изменяют свой наклон в процессе оборота, но наклон лопастей воздушного винта в процессе оборота остается в значительной степени постоянным. Такое относительно медленное изменение наклона лопастей воздушного винта может быть осуществлено простым способом и с помощью прочной механической части.
Посредством изменения наклона лопастей воздушного винта можно воздействовать на тяговое усилие подъемного несущего винта и тем самым на создаваемую им подъемную силу без необходимости в обязательном изменении скорости вращения, то есть числа оборотов, воздушного винта. Такой снабженный совместно-поворотно-подвижными лопастями воздушного винта подъемный воздушный винт называют также воздушным винтом изменяемого шага.
В принципе, может быть достаточным оснащение предложенного летательного аппарата лишь тремя подъемными несущими винтами. При этом каждый из подъемных несущих винтов должен быть отдельно управляемым, то есть должно быть возможным изменение создаваемого одним из подъемных несущих винтов тягового усилия независимо от других подъемных несущих винтов. При этом по меньшей мере три подъемных несущих винта закреплены на летательном аппарате в положениях, которые совместно однозначно задают плоскость, то есть подъемные несущие винты не должны были быть расположены линейно последовательно вдоль общей прямой линии. Посредством подходящего для создания различных подъемных сил управления тремя подъемными несущими винтами могут быть наклонены заданная подъемными несущими винтами плоскость и, вместе с тем, весь летательный аппарат.
До тех пор пока подъемные несущие винты направлены таким образом, что сумма созданных ими тяговых усилий действует по существу вертикально вниз, летательный аппарат может висеть в воздухе неподвижно, а посредством изменения величины этого общего тягового усилия изменяют высоту полета летательного аппарата. Если, исходя из такого полета в режиме висения, созданное отдельными подъемными несущими винтами тяговое усилие изменяется, тем самым может быть достигнуто, что действующее на летательный аппарат общее тяговое усилие более не действует вертикально вниз. Летательный аппарат может, вследствие этого, наклоняться вперед, назад или к одной из сторон и при этом начинает перемещение вперед или же назад или же осуществляет поперечный наклон.
В результате ограничения лишь тремя подъемными несущими винтами в предложенном летательном аппарате можно сэкономить конструктивные элементы и тем самым вес. Разумеется, в общем, является затруднительным с помощью лишь трех подъемных несущих винтов обеспечивать летательному аппарату вращение вокруг его вертикальной оси, то есть обеспечивать изменения курса.
Поэтому, может быть выгодным оснащение предложенного летательного аппарата, как в случае квадрокоптера, по меньшей мере четырьмя подъемными несущими винтами. При этом четыре подъемных несущих винта могут предпочтительно управляться независимо друг от друга. Поскольку положение или же наклон летательного аппарата может быть задан уже посредством созданного лишь тремя подъемными несущими винтами тягового усилия, выполнение дополнительного четвертого подъемного несущего винта открывает возможность обеспечения также и изменения курса летательного аппарата. Летательный аппарат тем самым может быть приведен посредством подходящего направления четырех подъемных несущих винтов в любое произвольное положение и направление полета. Такой летательный аппарат с четырьмя или большим количеством подъемных несущих винтов в дополнение к хорошим летным характеристикам в режиме висения также может быть точно и поворотливо маневренным.
Предложенный летательный аппарат должен иметь несущую конструкцию и крыльевую конструкцию. При этом несущая конструкция должна обеспечивать структурную прочность летательного аппарата таким образом, что как крыльевая конструкция, так и подъемные несущие винты могут быть прочно закреплены на летательном аппарате. Крыльевая конструкция должна иметь возможность обеспечения с помощью подходящим образом выполненных несущих поверхностей динамической подъемной силы, когда летательный аппарат достигает достаточно высокой крейсерской скорости полета.
Следует отметить то обстоятельство, что использование для несущей конструкции и для крыльевой конструкции двух отдельных понятий не означает, что осуществляемые несущей конструкцией и крыльевой конструкцией функции должны обязательно осуществляться отдельными реальными конструкциями. Например, функции несущей конструкции и функции крыльевой конструкции могут осуществляться как различными структурными компонентами предложенного летательного аппарата, так и теми же самыми структурными компонентами летательного аппарата. В качестве примера, крыло летательного аппарата одновременно может действовать в качестве создающей динамическую подъемную силу несущей поверхности и тем самым в качестве части крыльевой конструкции, так и механически соединять другие компоненты летательного аппарата друг с другом, и действовать тем самым в качестве части несущей конструкции. Например, крыло может иметь внешнюю обшивку, которая задает профиль образованной тем самым несущей поверхности и, таким образом, является частью крыльевой конструкции. Одновременно крыло может иметь располагающиеся внутри компоненты, такие как, например, расчалки, которые обеспечивают механическую прочность, и на которых, например, обшивка крыла закреплена таким образом, что они могут служить в качестве несущей конструкции.
В выгодном варианте осуществления несущая конструкция совместно с крыльевой конструкцией выполнены в виде так называемой тандемной крыльевой конструкции. В такой тандемной крыльевой конструкции предусмотрен удлиненный фюзеляж, от которого поперечно выступают меньшей мере две расположенные в горизонтальном направлении последовательно друг за другом пары несущих поверхностей.
В такой тандемной крыльевой конструкции фюзеляж совместно с несущими структурами выступающих из него пар несущих поверхностей может служить в качестве несущей конструкции. При этом на каждой из несущих поверхностей в каждом случае может быть расположен один из подъемных несущих винтов. Если предусмотрены, например, две пары несущих поверхностей, то первая пара несущих поверхностей и вторая пара несущих поверхностей могут иметь различную стреловидность. Если первая пара несущих поверхностей имеет отрицательную стреловидность, а вторая пара несущих поверхностей - положительную стреловидность, то при виде сверху на летательный аппарат может получаться впечатление расположения несущих поверхностей в форме буквы X. Кроме того, удлинение крыла может быть увеличено путем прикрепления концевых частей крыла к уже встроенным в несущую конструкцию несущим поверхностям таким образом, что увеличивается размах крыльевой конструкции или же пары несущих поверхностей. Под удлинением крыла специалист в авиастроении понимает отношение квадрата размаха обеих несущих поверхностей к площади крыла, которая получается при виде сверху на летательный аппарат.
Обе пары несущих поверхностей тандемной крыльевой конструкции могут быть расположены, например, также вдоль вертикальной оси летательного аппарата, то есть в Z-направлении, со смещением по отношению друг к другу.
Следует отметить, что также несколько удлиненных фюзеляжей могут быть предусмотрены в качестве части несущей конструкции. Например, два удлиненных фюзеляжа расположены параллельно направлению полета рядом друг с другом и соединены друг с другом посредством по меньшей мере одной другой несущей поверхности или одной другой пары несущих поверхностей.
За счет этого подъемные несущие винты расположены на летательном аппарате распределенными на большой площади и могут таким образом обеспечивать хорошие летные характеристики в режиме висения. Предпочтительно, подъемные несущие винты могут быть расположены в каждом случае на конечных областях несущих поверхностей, то есть практически с максимальным боковым удалением от фюзеляжа. Кроме того, четыре несущие поверхности обеих последовательно расположенных пар несущих поверхностей в каждом случае могут обеспечивать динамическую подъемную силу при достаточной крейсерской скорости полета. При этом несущие поверхности, а также подъемные несущие винты могут быть выполнены таким образом, что они создают при полете в режиме висения или же при достигнутой крейсерской скорости полета примерно одинаковые подъемные силы. Несущая конструкция летательного аппарата может своим устройством и размерами быть приспособленной для восприятия таких подъемным сил. В соответствии с этим, несущая конструкция может быть оптимизирована в отношении ее прочности и ее веса.
На каждой из несущих поверхностей может быть расположена гондола, на которой расположен в каждом случае один из подъемных несущих винтов. В гондоле, например, может быть размещен двигатель для несущего винта. Гондола может быть выполнена удобообтекаемой относительно созданного несущим винтом воздушного потока и/или относительно воздушного потока во время крейсерского полета.
Прежде всего, на каждой из несущих поверхностей может быть расположено оперение или руль. С помощью таких оперений или же рулей можно согласованно воздействовать на созданную тандемной крыльевой конструкцией подъемную силу, например, при ускорении до крейсерской скорости полета и тем самым при сопряженном постепенном дросселировании подъемных несущих винтов.
В альтернативном варианте осуществления несущая конструкция совместно с крыльевой конструкцией может быть выполнена, как и в обычном летательном аппарате, в виде удлиненного фюзеляжа лишь с двумя поперечно выступающими несущими поверхностями. При этом в каждом случае один из подъемных несущих винтов может быть расположен на каждой из несущих поверхностей, а на фюзеляже должен быть расположен по меньшей мере один другой несущий винт, а предпочтительно, два других подъемных несущих винта, в каждом случае на концах фюзеляжа.
В другой альтернативе несущая конструкция совместно с крыльевой конструкцией может быть выполнена в виде конструкции типа «летающее крыло». В такой конструкции типа «летающее крыло» вся несущая конструкция и вся крыльевая конструкция образованы из единственного крыла в форме несущей поверхности с располагающимися внутри него механически упрочняющими несущими компонентами. Крыло может иметь при этом стреловидную на виде сверху форму. Подъемные несущие винты и тяговый привод могут располагаться в подходящих областях такой конструкции типа «летающее крыло».
Кроме того, может быть выгодным, прежде всего, в летательном аппарате, который выполнен в виде такой конструкции типа «летающее крыло», но также и в других вышеописанных летательных аппаратах с тандемной крыльевой конструкцией или с подобной обычному летательному аппарату конструкцией, расширение несущей конструкции для разнесения гондол, на которых могут укрепляться подъемные несущие винты и/или тяговый привод.
Прежде всего, в летательном аппарате, который выполнен, как описано выше, с тандемной крыльевой конструкцией, но также и в других формах выполнения несущей конструкции и крыльевой конструкции, может быть выгодным или даже обязательным, выполнение подъемных несущих винтов, их расположение, а также осуществление выбора крыльевой конструкции таким образом, что сумма создаваемых подъемными несущими винтами тяговых усилий проходит по существу через центр тяжести летательного аппарата, а нейтральная точка крыльевой конструкции позиционирована приспособленно для горизонтального полета относительно центра тяжести летательного аппарата. Посредством такого расположения подъемных несущих винтов можно достигнуть стабильного полета в режиме висения. Посредством соответствующего выполнения крыльевой конструкции можно достигнуть стабильного состояния полета также при аэродинамическом полете на крейсерской скорости полета.
Подъемные несущие винты летательного аппарата могут быть выполнены с возможностью стопорения соответствующих лопастей воздушного винта подъемного несущего винта в заданном угловом положении.
Такое стопорение лопастей воздушного винта может быть выгодным, прежде всего, когда летательный аппарат горизонтально перемещается с высокой крейсерской скоростью полета в результате приведения его в действие посредством тягового привода, а несущие поверхности крыльевой конструкции создают при этом достаточную динамическую подъемную силу таким образом, что дополнительная, создаваемая посредством подъемных несущих винтов, подъемная сила более не требуется. В такой ситуации полета является выгодным стопорить лопасти воздушного винта подъемных несущих винтов в угловом положении таким образом, что они создают, с одной стороны, как можно малое аэродинамическое сопротивление при крейсерском полете и, что, с другой стороны, за счет обтекающего винт воздушного течения создаются как можно малые действующие горизонтально и/или вертикально на лопасти воздушного винта силы.
Воздушный винт подъемного несущего винта может иметь, например, строго две лопасти воздушного винта. С одной стороны, такой воздушный винт имеет высокий коэффициент полезного действия а, с другой стороны, незначительные дисбалансы. Кроме того, такой воздушный винт с двумя лопастями воздушного винта является как можно предпочтительным для предложенного летательного аппарата, поскольку он может стопориться во время положения крейсерского полета в угловом положении таким образом, что воздушный винт простирается параллельно направлению полета. В таком угловом положении застопоренный воздушный винт создает минимальное аэродинамическое сопротивление.
Тем не менее, также может быть предусмотрен однолопастной воздушный винт.Однолопастной воздушный винт имеет на выступающем над его осью несущего винта конце груз, который действует в качестве противовеса для однолопастного воздушного винта. Однолопастной воздушный винт может являться, например, частью подъемного несущего винта летательного аппарата, которая создает подъемную силу летательного аппарата в состоянии полета в режиме висения. Однолопастной воздушный винт может быть приведен для состояния крейсерского полета в параллельную выполненной в удлиненной форме гондоле направленность таким образом, что однолопастной воздушный винт неподвижно направлен по существу параллельно направлению полета или продольному направлению летательного аппарата. Однолопастной воздушный винт и гондола в таком случае выровнены по отношению друг к другу вдоль одной прямой, что уменьшает аэродинамическое сопротивление во время крейсерского полета летательного аппарата. Гондола может быть в свою очередь размещена на конце несущей поверхности.
Предпочтительно, подъемные несущие винты и тяговый привод в предложенном летательном аппарате приводятся в действие посредством управляемых независимо друг от друга двигателей. За счет таких управляемых отдельно друг от друга двигателей в летательном аппарате можно независимо друг от друга контролировать, с одной стороны, создаваемую подъемными несущими винтами подъемную силу, а с другой стороны, создаваемую тяговым приводом движущую силу. Прежде всего, осуществляемые посредством подъемных несущих винтов поперечные наклоны или изменения курса летательного аппарата могут управляться независимо от создаваемой посредством тягового привода горизонтальной движущей силы. При этом подъемные несущие винты также при возрастании крейсерской скорости полета могут управляться соответствующим образом для создания менее значительной подъемной силы, что позволяет в таком случае учитывать создаваемую несущей поверхностью крыльевой конструкции динамическую подъемную силу.
Предпочтительно, каждый из подъемных несущих винтов может приводиться в действие электродвигателем. Электродвигатели могут управляться в отношении их числа оборотов точно и быстро таким образом, что созданная подъемным несущим винтом подъемная сила может быть быстро и точно изменена для инициирования или же контролирования заданного движения в полете летательного аппарата. Прежде всего, в подобном мультикоптеру летательном аппарате точная и быстрая система управления созданными отдельными подъемными несущими винтами вертикальными тяговыми усилиями может быть важной для достижения надежных, стабильных и, в соответствующих случаях, поворотливо маневренных летных характеристик.
В специальном варианте осуществления предложенного летательного аппарата тяговый привод может приводиться в действие посредством двигателя внутреннего сгорания, и двигатель внутреннего сгорания при этом дополнительно может быть соединен с генератором для поставки электрической энергии для предусмотренных на подъемных несущих винтах электродвигателей. У такого снабженного разновидностью гибридного привода летательного аппарата действующая в горизонтальном направлении сила тяги может быть создана посредством двигателя внутреннего сгорания в составе тягового привода. Двигатель внутреннего сгорания может быть реализован при этом в форме поршневого двигателя или реактивного двигателя или подобного устройства. При этом горючее для такого двигателя внутреннего сгорания может иметься в летательном аппарате в достаточных количествах таким образом, что тяговый привод может приводиться в действие в течение более длительных периодов, и тем самым летательный аппарат может лететь довольно долгое время с крейсерской скоростью полета для достижения, например, лежащей на удалении цели. Тем не менее, в противоположность тяговому приводу, подъемные несущие винты предпочтительно приводятся в действие электродвигателями, что обеспечивает им более простую и более точную управляемость по сравнению с двигателем внутреннего сгорания во время полета в режиме висения или во время взлета или приземления. При этом электрическая энергия для этих электродвигателей может поставляться от соединенного с двигателем внутреннего сгорания генератора, причем электрическая энергия может либо поставляться непосредственно от генератора к электродвигателям, либо может сохраняться сначала в электрическом энергетическом накопителе, таком как, например, батареи для востребования затем по потребности для электродвигателей.
Следует отметить, что возможные признаки и преимущества летательного аппарата согласно изобретению описаны в настоящем документе со ссылками на различные варианты осуществления. Для специалиста понятно, что различные признаки могут быть подходящим способом скомбинированы или заменены для получения других вариантов осуществления летательного аппарата согласно изобретению.
В альтернативном варианте осуществления летательный аппарат может иметь по меньшей мере одну несущую поверхность, которая размещена на несущей конструкции поворотно- или вращательно-подвижно вокруг оси вращения. При этом ось вращения направлена, например, параллельно вертикальной оси или нормальной оси летательного аппарата.
В альтернативном варианте осуществления летательный аппарат имеет вторую несущую поверхность, которая размещена на несущей конструкции с возможностью поворота вокруг оси вращения, причем по меньшей мере одна несущая поверхность и вторая несущая поверхность для полета в режиме висения находятся в повернутом состоянии.
Кроме того, по меньшей мере одна несущая поверхность и вторая несущая поверхность могут находиться для крейсерского полета в повернутом в исходное положение состоянии, в котором передние кромки несущих поверхностей выровнены, по меньшей мере, частично вдоль одной прямой по отношению друг к другу.
В любом случае, несущая конструкция совместно с крыльевой конструкцией может быть выполнена в виде тандемной крыльевой конструкции с удлиненным фюзеляжем и двумя расположенными последовательно в горизонтальном направлении парами выступающих от фюзеляжа несущих поверхностей таким образом, что первая пара несущих поверхностей имеет первую стреловидность, которая отличается от второй стреловидности второй пары несущих поверхностей. При этом стреловидность описывает угол между поперечной осью летательного аппарата и передними кромками несущих поверхностей.
В альтернативном варианте осуществления летательного аппарата первая пара несущих поверхностей и вторая пара несущих поверхностей соединены посредством по меньшей мере одной соединительной структуры. При этом по меньшей мере одна соединительная структура имеет удлиненную форму и направлена параллельно удлиненному фюзеляжу. Кроме того, по меньшей мере одна соединительная структура может иметь оперение.
В альтернативном варианте осуществления первая пара несущих поверхностей и вторая пара несущих поверхностей расположены по отношению друг к другу со смещением в вертикальном направлении. При этом вертикальное направление описывает ось, направленную параллельно вертикальной оси или же нормальной оси летательного аппарата и, например, перпендикулярно поперечной оси и продольному направлению летательного аппарата.
В другом альтернативном варианте осуществления воздушные винты подъемных несущих винтов выполнены в виде однолопастных воздушных винтов.
Краткое описание чертежей
В последующем, варианты осуществления данного изобретения описываются со ссылками на приложенные чертежи, причем ни чертежи, ни описание не представляют собой ограничений объема изобретения.
Фиг. 1 показывает перспективный вид летательного аппарата согласно изобретению с тандемной крыльевой конструкцией.
Фиг. 2 показывает вид сверху на летательный аппарат на фиг. 1.
Фиг. 3 показывает перспективный вид летательного аппарата согласно изобретению с воздействующими на него силами.
Фиг. 4 показывает возможную конфигурацию приводов для летательного аппарата согласно изобретению.
Фиг. 5 показывает вид сверху на летательный аппарат согласно изобретению с двумя находящимися в повернутом состоянии несущими поверхностями.
Фиг.6 показывает вид сверху на летательный аппарат согласно изобретению с двумя находящимися в повернутом в исходное положение состоянии несущими поверхностями.
Фиг. 7 показывает перспективный вид летательного аппарата согласно изобретению с тандемной крыльевой конструкцией, в которой несущие поверхности являются стреловидными.
Фиг. 8 показывает вид сверху на летательный аппарат согласно изобретению с другой тандемной крыльевой конструкцией, в которой несущие поверхности являются стреловидными.
Фиг. 9 показывает вид сверху на летательный аппарат согласно изобретению с шестью подъемными несущими винтами.
Фиг. 10 показывает вид сверху на летательный аппарат согласно изобретению с двумя расположенными параллельно друг другу удлиненными фюзеляжами и с двумя парами несущих поверхностей, на которых размещены подъемные несущие винты.
Фиг. 11 показывает вид сверху на летательный аппарат согласно изобретению с двумя парами несущих поверхностей и с двумя расположенными параллельно друг другу удлиненными фюзеляжами, на которых размещены подъемные несущие винты.
Фиг. 12 показывает перспективный вид летательного аппарата согласно изобретению с несущей конструкцией, которая имеет две пары несущих поверхностей с различными стреловидностями.
Фиг. 13 показывает вид сверху на летательный аппарат согласно изобретению с несущей конструкцией, которая имеет две пары несущих поверхностей с различными стреловидностями.
Фиг. 14 показывает вид сверху на летательный аппарат согласно изобретению, у которого фюзеляж интегрирован в несущие поверхности.
Фиг. 15 показывает вид сверху на летательный аппарат согласно изобретению с несущей конструкцией, которая имеет удлиненный фюзеляж, пару несущих поверхностей, а также размещенные на соединительных элементах подъемные несущие винты.
Фиг. 16 показывает вид сверху на летательный аппарат согласно изобретению с несущей конструкцией, которая имеет удлиненный фюзеляж, пару несущих поверхностей, а также соединительные элементы, которые расположены центрально на несущих поверхностях, и на которых закреплены подъемные несущие винты.
Фиг. 17 показывает перспективный вид летательного аппарата с несущей конструкцией, которая имеет фюзеляж, две расположенные последовательно в продольном направлении пары несущих поверхностей, а также два расположенных параллельно продольному направлению удлиненных соединительных элемента.
Фиг. 18 показывает перспективный вид выполненной в удлиненной форме и закрепленной на несущей поверхности гондолы с однолопастным воздушным винтом.
Чертежи являются только схематическими и выполнены без соответствия масштабу. Одинаковые ссылочные обозначения на чертежах обозначают одинаковые или одинаково действующие признаки.
Описание предпочтительных вариантов осуществления изобретения
На фиг. 1 и 2 представлены перспективный вид и вид сверху на летательный аппарат 1 согласно варианту осуществления данного изобретения.
Летательный аппарат 1 имеет тандемную крыльевую конструкцию в представленном варианте осуществления, причем, в случае квадрокоптера, на каждом конце одной из четырех несущих поверхностей 3 расположен один из четырех оснащенных воздушным винтом 7 подъемных несущих винтов 5. Подъемные несущие винты расположены в гондолах 6 на концах несущих поверхностей 3.
Летательный аппарат 1 имеет несущую конструкцию 27, а также крыльевую конструкцию 15.
Несущая конструкция 27 придает летательному аппарату 1 необходимую механическую прочность для передачи, например, созданных подъемными несущими винтами 5 или несущими поверхностями 3 сил между отдельными областями летательного аппарата 1. Несущая конструкция 27 для этого имеет, например, распорки, стрингеры и шпангоуты, с помощью которых могут быть образованы, в том числе, удлиненный фюзеляж 13, а также несущие части несущих поверхностей 3. Несущая конструкция может служить также для удержания, например, системы 30 камер.
Крыльевая конструкция 15 образует, в том числе, несколько несущих поверхностей 3 летательного аппарата. При этом каждая из несущих поверхностей 3 крыльевой конструкции 15 имеет профиль, подходящий для создания посредством динамической подъемной силы действующей на летательный аппарат 1 при горизонтальном перемещении летательного аппарата 1 подъемной силы.
В представленных на фиг. 1 и 2 примерах несущая конструкция 27 совместно с крыльевой конструкцией 15 выполнена в виде тандемной крыльевой конструкции, в которой удлиненный фюзеляж 13 снабжен двумя расположенными последовательно в горизонтальном направлении парами несущих поверхностей 3, которые предусмотрены выступающими поперечно, приближенно под прямым углом, от фюзеляжа 13 по бокам.
Несущие поверхности 3 крыльевой конструкции 15 при этом выполнены таким образом, и размещены в подходящих положениях на фюзеляже 13 таким образом, что нейтральная точка крыльевой конструкции 15 позиционирована относительно центра тяжести летательного аппарата 1 приспособленным для горизонтального полета летательного аппарата 1 образом. При этом под нейтральной точкой профиля несущей поверхности или же крыльевой конструкции с несколькими профилями несущей поверхности можно понимать контрольную точку с постоянным крутящим моментом в области умеренных углов атаки.
Как на несущих поверхностях 3а передней пары несущих поверхностей, так и на несущих поверхностях 3b задней пары несущих поверхностей может быть предусмотрено дополнительное оперение 21, 23 в форме закрылков или рулей, которые могут служить, как и в случае обычного летательного аппарата, при высоких крейсерских скоростях полета в горизонтальном направлении в качестве руля высоты или же горизонтального оперения. Кроме того, в хвостовой части фюзеляжа 13 может быть предусмотрено вертикальное оперение или же руль направления.
На концах или же на конечных областях каждой из несущих поверхностей 3а, 3b в каждом случае один несущий винт 5 на гондоле 6 предусмотрен таким образом, что, в общем, четыре подъемных несущих винта 5 расположены в общей плоскости и на четырех углах виртуального четырехугольника.
Каждый из подъемных несущих винтов 5 имеет воздушный винт 7, который может приводиться во вращательное движение посредством оси 19 несущего винта и двигателя. При этом воздушный винт 7 может быть представлен неразъемным, предпочтительно, цельным воздушным винтом таким образом, что созданная подъемным несущим винтом 5 подъемная сила может быть изменена лишь посредством изменения числа оборотов воздушного винта 7. Альтернативно, воздушный винт 7 может быть представлен воздушным винтом с изменяемым шагом, в котором лопасти 29 воздушного винта могут изменять свой наклон и, таким образом, также при неизменном числе оборотов может быть изменена создаваемая подъемным несущим винтом 5 подъемная сила.
Как представлено на фиг. 3, каждый из подъемных несущих винтов 5 выполнен для создания подъемной силы F1, F2, F3, F4. При этом подъемные несущие винты 5 должны быть позиционированы в летательном аппарате 1 и быть направленными таким образом, что сумма созданных ими подъемных сил простирается примерно через центр тяжести летательного аппарата 1, прежде всего, при одновременном равномерном приведении в действие всех подъемных несущих винтов 5. При этом создаваемые, в общем, подъемными несущими винтами 5 тяговые усилия должны быть достаточными для подъема летательного аппарата 1 и для обеспечения его зависания в воздухе. Подъемные несущие винты 5 вращаются при этом, как показано на фиг. 3 с помощью стрелок, по существу взаимно частично навстречу друг другу таким образом, что созданные подъемными несущими винтами 5 моменты взаимно гасятся.
Посредством изменения созданных отдельными подъемными несущими винтами 5 подъемных сил F1, F2, F3, F4 может быть изменено по величине и направлению суммарное созданное и действующее на летательный аппарат 1 общее тяговое усилие, и тем самым летательный аппарат 1 поднимается или опускается, наклоняется вперед или назад или к одной из сторон или вращается вокруг вертикальной оси летательного аппарата таким образом, что могут быть осуществлены такие движение в полете, как прямолинейный полет, поперечные наклоны и/или изменения курса.
В принципе, все движения в полете могут быть таким образом осуществлены предложенным летательным аппаратом 1, таким как квадрокоптер, уже посредством подходящего направления различных подъемных несущих винтов 5. Однако при этом за счет физических эффектов ограничена достигаемая крейсерская скорость полета, с которой летательный аппарат 1 может перемещаться в горизонтальном направлении.
Поэтому, для достижения высоких крейсерских скоростей полета предложенный летательный аппарат 1 дополнительно оснащен тяговым приводом 9, с помощью которого может создаваться действующая в горизонтальном направлении сила F5 тяги (смотри фиг. 3).
В представленном примере тяговый привод 9 выполнен с помощью приводимого в действие дополнительным двигателем тягового воздушного винта 11, и расположен в хвостовой части фюзеляжа 13. Тем не менее, в тяговом приводе 9 могут быть применены также и другие приводные механизмы, такие как, например, реактивный двигатель. Тяговый привод 9 должен быть наделен достаточными размерам, то есть обеспечивать достаточную выходную мощность для предоставления летательному аппарату 1 ускорения до высоких крейсерских скоростей полета, например до 800 км/ч.
На ускоренном посредством тягового привода 9 летательном аппарате 1 с возрастанием крейсерской скорости полета на профилированных несущих поверхностях 3 создается возрастающая динамическая подъемная сила. Эта динамическая подъемная сила помогает удерживать летательный аппарат 1 в воздухе таким образом, что созданные подъемными несущими винтами 5 подъемные силы F1, F2, F3, F4 могут постепенно уменьшаться до тех пор, пока летательный аппарат 1 не достигнет достаточно высокой крейсерской скорости полета в горизонтальном направлении, при которой вся необходимая для поддержания высоты полета летательного аппарата подъемная сила создается посредством несущих поверхностей 3.
При такой крейсерской скорости полета подъемные несущие винты 5 могут быть остановлены. Прежде всего, предусмотрено стопорение воздушных винтов 7 подъемных несущих винтов 5 в положении, в котором они создают как можно малое аэродинамическое сопротивление, и как можно малые силы воздействуют на воздушный винт 7.
В представленном примере воздушные винты 7 оснащены к тому же лишь двумя лопастями 29 воздушного винта таким образом, что линейно простирающийся воздушный винт 7 с его лопастями воздушного винта 29 при крейсерском полете может быть выровнен в направлении полета, и может быть застопорен в этой ориентации. Альтернативно, также является возможным убирание воздушного винта 7 при крейсерском полете или утапливание воздушного винта 7 или же всего подъемного несущего винта 5 во время крейсерского полета с целью снижения аэродинамического сопротивления, например, в предусмотренной на соответствующем конце несущей поверхности гондоле 17.
На фиг. 4 представлена возможность выгодной гибридной приводной системы для летательного аппарата 1 согласно изобретению. Основной двигатель 31 применяется при этом для приведения в действие тягового воздушного винта 11. Основной двигатель 31 таким образом образует совместно с тяговым воздушным винтом 11 тяговый привод 9, выполненный для создания действующей в горизонтальном направлении на летательный аппарат силы F5 тяги. При этом основной двигатель 31 может быть представлен произвольным типом двигателя, который пригоден для обеспечения достаточной мощности для горизонтального полета при требуемых значениях крейсерских скоростей полета. Например, основной двигатель 31 может быть представлен дизельным двигателем, бензиновым двигателем, двигателем Ванкеля, газовой турбиной, снабженным топливным элементом электродвигателем и т.д.
Дополнительно к тяговому воздушному винту 11 основной двигатель 31 приводит в действие также электрический генератор 33. Генератор 33 преобразует предоставленную в распоряжение от основного двигателя 31 механическую приводную энергию в электрическую энергию и предоставляет ее посредством проводов 35 в распоряжение нескольким электродвигателям 37. При этом электродвигатели 37 являются частью предусмотренных на концах несущих поверхностей подъемных несущих винтов 5 сходного с квадрокоптером летательного аппарата 1. Электродвигатели 37 могут приводить в действие в каждом случае посредством оси 19 несущего винта закрепленный на ней воздушный винт 7. Действующий на воздушный винт 7 крутящий момент и тем самым принимаемое воздушным винтом 7 число оборотов может при этом быть очень точно и быстро изменено с помощью электродвигателя 37. Для обеспечения снабжения четырех электродвигателей 37 электрической мощностью и обеспечения возможности управления ими, в генераторе 33 предусмотрена электронная силовая управляющая система 39.
Альтернативно к ранее описанной гибридной приводной системе, предложенный летательный аппарат 1 может приводиться в действие также с помощью других приводных систем. Например, подъемные несущие винты 5 также могут приводиться в действие с помощью двигателей внутреннего сгорания. Альтернативно, центральный двигатель может быть предусмотрен для всей приводной системы, и несколько подъемных несущих винтов посредством валов передачи мощности могут быть соединены с этим двигателем, причем в сопутствующих приводных механизмах, в соответствующих случаях, могут быть предусмотрены сцепления и/или передаточные механизмы. При этом создаваемая подъемным несущим винтом 5 подъемная сила может быть изменена посредством изменения числа оборотов и/или посредством изменения регулируемого наклона лопастей воздушного винта подъемного несущего винта. Каждый из подъемных несущих винтов 5 может приводиться в действие также посредством отдельного электродвигателя, причем электродвигатели, со своей стороны, могут приводиться в действие посредством основного двигателя.
Описанные возможности привода, как например, гибридная приводная система, могут комбинироваться со всеми ранее и в дальнейшем разъясненными вариантами осуществления. Это является возможным, поскольку в описанных вариантах осуществления всегда предусмотрены по меньшей мере один тяговый привод 9 и по меньшей мере три подъемных несущих винта 5.
Фиг. 5 показывает вид сверху на летательный аппарат 1 с несущей конструкцией 27, которая имеет две поворотно-подвижные друг относительно друга несущие поверхности 3. В представленной конфигурации летательный аппарат 1 находится в состоянии 40 полета в режиме висения, в котором несущие поверхности 3 находятся в повернутом состоянии. При этом несущие поверхности 3 расположены с возможностью вращения или же с возможностью поворота вокруг оси 42 вращения. Ось 42 вращения расположена, например, параллельно вертикальной оси и/или нормальной оси летательного аппарата 1, и простирается через удлиненный фюзеляж 13 летательного аппарата 1. При этом несущие поверхности 3 на виде сверху в каждом случае возвышаются над удлиненным фюзеляжем 13 таким образом, что обе несущие поверхности 3 пересекаются в области оси вращения 42. Другими словами, левая несущая поверхность простирается над удлиненным фюзеляжем 13 прочь к правой стороне летательного аппарата 1, а правая несущая поверхность простирается над удлиненным фюзеляжем 13 прочь к левой стороне летательного аппарата 1. При этом нужно учитывать, что находящаяся с левой стороны в направлении полета несущая поверхность задумана под левой несущей поверхностью фюзеляжа 13, причем направление полета описывает то горизонтальное направление, в котором тяговое усилие тягового привода 9 действует с помощью тягового воздушным винтом 11. Аналогично, находящаяся на правой стороне в направлении полета несущая поверхность задумана под правой несущей поверхностью фюзеляжа 13. Выступающая на правую сторону фюзеляжа 13 часть левой несущей поверхности в отношении площади может быть меньше, чем находящаяся с левой стороны фюзеляжа 13 часть левой несущей поверхности. Аналогично, выступающая на левую сторону фюзеляжа 13 часть правой несущей поверхности в отношении площади может быть меньше, чем находящаяся на правой стороне фюзеляжа 13 часть правой несущей поверхности.
Передняя кромка 45 крыла или же передняя кромка несущей поверхности может быть расположена под заданным углом ϕ стреловидности наклонно по отношению к поперечной оси 60 удлиненного фюзеляжа 13. Под поперечной осью 60 специалист в авиастроении понимает направленную перпендикулярно продольному направлению 50 фюзеляжа 13 и вертикальной оси летательного аппарата ось. Угол ϕ стреловидности измеряется, например, между поперечной осью 60 фюзеляжа 13 и передней кромкой 45 несущих поверхностей 3.
Стреловидность несущих поверхностей 3 или же угол ϕ стреловидности может быть приспособлен, например, к скорости полета летательного аппарата 1 в горизонтальном полете. Для этого угол ϕ стреловидности при переходе из состояния 40 полета в режиме висения в состояние крейсерского полета может непрерывно уменьшаться, что подробно описывается в последующем. Стрелки 44 показывают перемещение несущих поверхностей 3 при переходе из состояния 40 полета в режиме висения в состояние крейсерского полета, то есть от повернутого состояния в повернутого в исходное положение состояние. Фиксатор несущих поверхностей 3 при заданной стреловидности может быть предоставлен в виде соответствующего стопорного приспособления для несущих поверхностей 3. Поперечное направление 60 удлиненного фюзеляжа 13 может быть направлено перпендикулярно оси 42 вращения и/или перпендикулярно горизонтальному направлению. Горизонтальное направление является параллельным, например, продольному направлению 50 удлиненного фюзеляжа 13 летательного аппарата 1. Поворотные несущие поверхности в каждом случае имеют два подъемных несущих винта 5, причем каждый из подъемных несущих винтов 5 имеет воздушный винт 7. Подъемные несущие винты 5 в летательном аппарате 1 в повернутом состоянии позиционированы и направлены таким образом, что сумма созданных ими подъемных сил простирается примерно через центр тяжести летательного аппарата 1, прежде всего, при одновременном равномерном приведении в действие всех подъемных несущих винтов 5. Это делает возможным состояние 40 полета в режиме висения, при котором летательный аппарат 1 не перемещается в горизонтальном направлении или делает это только незначительно. Например, несущий винт 5 левой несущей поверхности размещен с левой стороны фюзеляжа 13, а другой несущий винт 5 размещен на выступающей на правую сторону фюзеляжа 13 части левой несущей поверхности. Аналогично, несущий винт 5 правой несущей поверхности размещен на правой стороне фюзеляжа 13, а другой несущий винт 5 размещен на выступающей на левую сторону фюзеляжа 13 части правой несущей поверхности. При переходе из состояния 40 полета в режиме висения в состояние крейсерского полета скорость вращения воздушных винтов 7 подъемных несущих винтов 5 может непрерывно замедляться таким образом, что в конечном итоге, в состоянии крейсерского полета они останавливаются.
Фиг. 6 показывает вид сверху на летательный аппарат 1 с несущей конструкцией 27, которая имеет две поворотно-подвижные друг относительно друга несущие поверхности 3. В представленной конфигурации летательный аппарат 1 находится в состоянии крейсерского 41 полета, при котором несущие поверхности 3 находятся в повернутом в исходное положение состоянии. В состоянии 41 крейсерского полета угол ϕ стреловидности является меньшим, чем в состоянии 40 полета в режиме висения. Передняя кромка 45 левой несущей поверхности может быть направлена в повернутом в исходное положение состоянии вдоль одной прямой с передней кромкой выступающей за фюзеляж 13 части правой несущей поверхности. Аналогично, в повернутом в исходное положение состоянии передняя кромка 45 правой несущей поверхности может быть направлена вдоль одной прямой с передней кромкой выступающей за фюзеляж 13 части левой несущей поверхности. Воздушные винты 7 подъемных несущих винтов 5 в повернутом в исходное положение состоянии являются неподвижными и направлены таким образом, что они в состоянии крейсерского 41 полета создают как можно малое аэродинамическое сопротивление. Например, выполненные в удлиненной форме воздушные винты 7 в таком случае направлены в их продольном направлении параллельно горизонтальному направлению или продольному направлению 50 фюзеляжа 13.
Величина угла ϕ стреловидности несущих поверхностей 3 может как в повернутом состоянии, так и в повернутом в исходное положение состоянии располагаться между 0 градусов и 90 градусами. Когда угол ϕ стреловидности превышает 0 градусов, имеется положительная стреловидность. Когда угол ϕ стреловидности меньше 0 градусов, имеется отрицательная стреловидность. Когда угол стреловидности равен точно 0 градусов, какая-либо стреловидность отсутствует. В летательном аппарате 1 согласно изобретению являются возможными как положительные, так и отрицательные значения стреловидности несущих поверхностей 3. Несущие поверхности 3 также могут быть нестреловидными. Положительная, а также отрицательная стреловидность может быть предусмотрена для всех ранее и в дальнейшем описанных вариантов осуществления.
Фиг. 7 показывает перспективный вид летательного аппарата 1 с тандемной крыльевой конструкцией. При этом выполнены удлиненный фюзеляж 13 и две расположенные последовательно в горизонтальном направлении пары выступающих от фюзеляжа 13 несущих поверхностей 3. Первая пара несущих поверхностей За имеет отрицательную стреловидность с углом ϕ стреловидности величиной от 0 до -90 градусов, а вторая пара несущих поверхностей 3b имеет положительную стреловидность с углом ϕ стреловидности величиной от 0 до 90 градусов. В показанном варианте осуществления первая пара несущих поверхностей 3а относительно направления полета расположена перед второй парой несущих поверхностей 3b таким образом, что на виде сверху на летательный аппарат 1 образуется впечатление расположения первой пары несущих поверхностей 3а и второй пары несущих поверхностей 3b в форме буквы X. Первая пара несущих поверхностей 3 и вторая пара несущих поверхностей 3 соединены друг с другом посредством соединительных структур 46. При этом правая несущая поверхность первой пары несущих поверхностей 3а соединена посредством соединительной структуры 46 с правой несущей поверхностью второй пары несущих поверхностей 3b. Аналогично, левая несущая поверхность первой пары несущих поверхностей 3а соединена посредством соединительной структуры 46 с левой несущей поверхностью второй пары несущих поверхностей 3b. Предпочтительно предусмотрены две соединительных структуры 46, однако, может быть предусмотрено произвольное число соединительных структур 46. Одна соединительная структура 46 может быть размещена, например, на конце левой несущей поверхности первой пары несущих поверхностей 3а, а другая соединительная структура 46 может быть размещена, например, на конце правой несущей поверхности первой пары несущих поверхностей 3а. Соединительные структуры 46 могут иметь удлиненную форму, и могут быть направленными параллельно продольному направлению 50 фюзеляжа 13. Кроме того, соединительные структуры 46 могут быть соединены друг с другом посредством хвостового оперения 23. Хвостовое оперение 23 представлено, например, вертикальным оперением или горизонтальным оперением или комбинацией из вертикального оперения и горизонтального оперения. Соединительные структуры 46 могут быть расположены таким образом, что несущие поверхности второй пары несущих поверхностей 3b пересекают соединительные структуры 46, а несущие поверхности первой пары несущих поверхностей 3а оканчиваются на соединительных структурах 46. Соединительные структуры 46 могут, кроме того, иметь подъемные несущие винты 5 с воздушными винтами 7. При этом в каждом случае на обеих соединительных структурах 46 размещены по два подъемных несущих винта 5. Подъемные несущие винты 5 на летательном аппарате 1 позиционированы и направлены таким образом, что сумма созданных ими подъемных сил простирается примерно через центр тяжести летательного аппарата 1, прежде всего, при одновременном равномерном приведении в действие всех подъемных несущих винтов 5. При этом в каждом случае один несущий винт 5 размещен на соединительных структурах 46 в области первой пары несущих поверхностей 3а, а в каждом случае один несущий винт 5 размещен на соединительных структурах 46 в области второй пары несущих поверхностей 3b. Посредством такого расположения подъемных несущих винтов 5 летательный аппарат 1 может быть приведен в состояние 40 полета в режиме висения. Соединительные структуры 46 могут выступать относительно направление полета летательного аппарата 1 за размещенный на фюзеляже 13 тяговый привод 9, где обе соединительные структуры 46 соединяются друг с другом посредством хвостового оперения 23. Ориентированные в продольном направлении 50 соединительные структуры 46 тем самым соединяются друг с другом посредством первой пары несущих поверхностей 3а, второй пары несущих поверхностей 3b и хвостового оперения 23. Соединительные структуры 46 тем самым не имеют непосредственного контакта с фюзеляжем 13, а соединяются с ним посредством пар несущих поверхностей.
Фиг. 8 показывает вид сверху на конфигурацию летательного аппарата 1, в котором первая пара несущих поверхностей 3а расположена относительно направления полета перед второй парой несущих поверхностей 3b. При этом первая пара несущих поверхностей 3а имеет положительную стреловидность, а вторая пара несущих поверхностей 3b - отрицательную стреловидность таким образом, что на виде сверху образуется впечатление расположения первой пары несущих поверхностей 3а и второй пары несущих поверхностей 3b в форме буквы О, когда концы каждой несущей поверхности соединяются друг с другом посредством соединительных структур 46. Все несущие поверхности 3 соединяются своими концами с соединительными структурами 46 таким образом, что две соединительные структуры 46 направлены параллельно продольному направлению 50 фюзеляжа 13. Первая соединительная структура 46 соединяет правые несущие поверхности первой пары и второй пары несущих поверхностей 3а, 3b, а вторая соединительная структура 46 соединяет левые несущие поверхности первой пары и второй пары несущих поверхностей 3а, 3b. Кроме того, несущие поверхности в каждом случае могут иметь хвостовые оперения 23 и/или системы повышения несущих свойств, как например, посадочные закрылки. Обе соединительные структуры в каждом случае могут иметь два конца, на которых расположено в каждом случае по одному подъемному несущему винту 5. Четыре подъемных несущих винта 5 в летательном аппарате 1 позиционированы и направлены таким образом, что сумма созданных ими подъемных сил простирается примерно через центр тяжести летательного аппарата 1, прежде всего, при одновременном равномерном приведении в действие всех подъемных несущих винтов 5 таким образом, что является возможным состояние 40 полета в режиме висения летательного аппарата 1.
Фиг. 9 показывает вид сверху на конфигурацию летательного аппарата 1 с шестью подъемными несущими винтами 5. Летательный аппарат имеет для этого пару несущих поверхностей 3 и две соединительные структуры 46, причем соединительные структуры 46 направлены параллельно поперечной оси 60 летательного аппарата. Соединительные структуры 46 по отношению к направлению полета летательного аппарата 1 расположены со смещением друг относительно друга таким образом, что соединительная структура 46 расположена перед несущими поверхностями 3, а соединительная структура 46 -за несущими поверхностями 3. Соединительные структуры 46 могут быть снабжены, например, создающим динамическую подъемную силу профилем таким образом, что поперечное расположение соединительных структур 46 создает преимущество в создании подъемной силы посредством соединительных структур 46 дополнительно к несущим поверхностям 3. Подъемные несущие винты 5 размещены на соответствующих концах ориентированных параллельно поперечной оси 60 соединительных структур 46 и несущих поверхностей 3. При этом шесть подъемных несущих винтов 5 позиционированы и направлены таким образом, что сумма созданных ими подъемных сил простирается примерно через центр тяжести летательного аппарата 1, прежде всего, при одновременном равномерном приведении в действие всех подъемных несущих винтов 5. Вследствие этого летательный аппарат 1 может осуществлять состояние 40 полета в режиме висения: Для создания движущей силы летательного аппарата 1 в состоянии 41 крейсерского полета на корме может быть предусмотрен тяговый привод 9. Кроме того, может быть предусмотрено, что обе соединительные структуры 46 соединяются, друг с другом на своих концах в каждом случае посредством двух других соединительных элементов 47, причем оба других соединительных элемента 47 ориентированы параллельно продольной оси 50 удлиненного фюзеляжа 13 и перпендикулярно обеим соединительным структурам 46.
На фиг. 10 показан вид сверху на летательный аппарат 1, который имеет несущую конструкцию 27 с двумя расположенными параллельно друг другу удлиненными фюзеляжами 13 и двумя парами несущих поверхностей 3а, 3b, на концах которых в каждом случае размещена одна гондола 6 в каждом случае с одним подъемным несущим винтом 5. Посредством подъемных несущих винтов 5 может быть создана подъемная сила, необходимая в состоянии 40 полета в режиме висения. Первая пара несущих поверхностей 3а расположена относительно направления полета летательного аппарата 1 перед второй парой несущих поверхностей 3b. Кроме того, между обоими фюзеляжами 13 предусмотрены две расположенные в направлении полета со смещением друг относительно друга несущие поверхности 3с, 3d, которые соединяют оба фюзеляжа 13 друг с другом. Расположенные между фюзеляжами 13 несущие поверхности 3с, 3d могут иметь, равно как и обе пары несущих поверхностей 3а, 3b, создающий динамическую подъемную силу профиль. При этом все несущие поверхности летательного аппарата 1 могут быть нестреловидными, то есть не имеющими стреловидности. На каждом из двух удлиненных фюзеляжей 13 может быть размещен, по отношению к направлению полета в задней области фюзеляжа 13, то есть на корме, тяговый привод 9, выполненный для создания движущей силы летательного аппарата 1 в состоянии 41 крейсерского полета. Это означает, что тяговый привод 9 может быть предусмотрен на каждом из двух фюзеляжей 13 на корме таким образом, что представленная здесь конфигурация имеет два тяговых привода 9. На обеих парах несущих поверхностей 3а, 3b могут быть предусмотрены системы повышения несущих свойств, например посадочные закрылки.
Фиг. 11 показывает вид сверху на летательный аппарат 1, который имеет несущую конструкцию 27 с двумя расположенными параллельно друг другу удлиненными фюзеляжами 13 и с двумя парами несущих поверхностей 3а, 3b. Кроме того, между обоими фюзеляжами 13 предусмотрены две расположенные в направлении полета со смещением друг относительно друга несущие поверхности 3с, 3d, которые соединяют оба фюзеляжа 13 друг с другом. Расположенные между фюзеляжами 13 несущие поверхности 3с, 3d могут иметь, равно как и обе пары несущих поверхностей 3а, 3b, создающий динамическую подъемную силу профиль. Оба удлиненных фюзеляжа 13 в каждом случае имеют по два подъемных несущих винта 5, которые расположены со смещением друг относительно друга вдоль продольной оси 50 фюзеляжа 13. Например, в каждом случае по одному подъемному несущему винту 5 размещено на обоих концах удлиненного фюзеляжа 13. В целом, таким образом, на летательном аппарате 1 могут быть предусмотрены 4 подъемных несущих винта 5, которые создают подъемную силу в состоянии 40 полета в режиме висения. На одной из двух расположенным между фюзеляжами 13 несущих поверхностей 3с, 3d может быть предусмотрен тяговый привод 9, который создает движущую силу в состоянии крейсерского полета. Предпочтительно, тяговый привод 9 размещен по отношению к направлению полета в задней области, то есть на несущей поверхности 3d между обеими кормами фюзеляжей 13 летательного аппарата 1. При этом тяговый привод 9 размещен центрально между обоими фюзеляжами 13 для возможно более равномерной передачи движущей силы на летательный аппарат 1.
На фиг. 12 показан перспективный вид летательного аппарата 1 с несущей конструкцией 27, которая имеет две пары несущих поверхностей 3а, 3b, причем каждая из обеих пар несущих поверхностей 3а, 3b имеет различную стреловидность. При этом передняя по отношению к направлению полета пара несущих поверхностей 3а имеет отрицательную стреловидность, а задняя пара несущих поверхностей 3b имеет положительную стреловидность таким образом, что при виде сверху, как представлено на фиг. 13, образуются впечатление расположения несущих поверхностей 3а, 3b в форме буквы X. Следует, однако, отметить, что обе пары несущих поверхностей 3а, 3b не обязательно должны иметь одинаковый размах или удлинение крыла. Например, задняя пара несущих поверхностей 3b имеет больший размах, чем передняя пара несущих поверхностей 3а, что позволяет достичь более высокой аэродинамической эффективности. В равной мере, площадь крыла задней пары несущих поверхностей 3b может быть больше, чем площадь крыла передней пары несущих поверхностей 3а и наоборот. На концах каждой несущей поверхности 3а, 3b может быть размещена гондола 6 в каждом случае с одним подъемным несущим винтом 5 таким образом, что при одновременном и равномерном приведении в действие всех подъемных несущих винтов 5 созданные ими подъемные силы простираются примерно через центр тяжести летательного аппарата 1. Тем не менее, гондолы 6 с подъемными несущими винтами 5 не должны быть обязательно расположены на концах пар несущих поверхностей 3а, 3b. Они могут быть предусмотрены в произвольном положении над или под парами несущих поверхностей 3а, 3b, например, также поблизости от фюзеляжа. Кроме того, несущая конструкция 27 имеет удлиненный фюзеляж 13, на котором обе пары несущих поверхностей 3а, 3b размещены таким образом, что может быть создана необходимая для состояния 40 полета в режиме висения подъемная сила. Тяговый привод 9 размещен в области кормы летательного аппарата 1 для создания движущей силы в состоянии 41 крейсерского полета. Несущие поверхности 3а, 3b могут быть размещены по отношению к вертикальной оси или нормальной оси летательного аппарата 1 в верхней области фюзеляжа 13 таким образом, что в наземном режиме эксплуатации летательного аппарата 1 имеется большее расстояние между почвой и несущими поверхностями 3а, 3b. 3а счет этого подъемные несущие винты 5 могут быть расположены также под несущими поверхностями 3а, 3b. Несущие поверхности 3а, 3b могут быть направлены, кроме того, в виде обратного поперечного V. Под обратным поперечным V специалист в авиастроении понимает отрицательное V-образное положение несущих поверхностей 3а, 3b при направлении взгляда в продольном направлении 50 фюзеляжа 13 или в направлении полета. То есть, несущие поверхности 3а, 3b исходя от фюзеляжа 13, опускаются к своим концам по отношению к вертикальной оси летательного аппарата 1. Посредством отрицательного V-образного положения может быть повышена, прежде всего, маневренность летательного аппарата 1. Как отрицательные V-образное положение, так и положительное V-образное положение несущих поверхностей могут быть предусмотрены во всех ранее и в дальнейшем описанных вариантах осуществления. При положительном V-образном положении несущие поверхности 3 по отношению к вертикальной оси летательного аппарата 1 поднимаются, исходя от фюзеляжа 13, к своим концам таким образом, что при направлении взгляда в продольном направлении 50 создается впечатление V-образной формы несущих поверхностей 3. Является возможным, что передняя пара несущих поверхностей 3а имеет отличный размах по сравнению с задней парой несущих поверхностей 3b. Тем самым, при подходящем расположении несущих поверхностей, может быть достигнута более высокая аэродинамическая эффективность. Например, передняя пара 3а несущих поверхностей имеет менее значительный размах, чем задняя пара несущих поверхностей 3b. Кроме того, передняя пара несущих поверхностей 3а может быть предусмотрена на фюзеляже 13 на отличной высоте вдоль вертикальной оси летательного аппарата 1. Например, передняя пара несущих поверхностей 3а расположена на фюзеляже 13 относительно вертикальной оси выше, чем задняя пара несущих поверхностей 3b, вследствие чего при возможном срыве потока на передней паре несущих поверхностей 3а задняя пара несущих поверхностей 3b продолжает и далее создавать подъемную силу таким образом, что летательный аппарат 1 оказывается в состоянии выполнять стабильный в аэродинамическом или аэромеханическом аспекте полет.
Во всех вариантах осуществления с тандемной крыльевой конструкцией, то есть с двумя парами несущих поверхностей, первая пара несущих поверхностей 3а и вторая пара несущих поверхностей 3b могут иметь различную площадь крыла. Под площадью крыла специалист в авиастроении понимает ту площадь, которая описывается формой крыла в плане, например на виде сверху.
Фиг. 14 показывает вид сверху на летательный аппарат 1, в котором фюзеляж 13 одновременно являет собой несущие поверхности 3. То есть, фюзеляж 1 встроен в несущие поверхности 3. Такая конструкция обозначается также как конфигурация типа «летающее крыло». Фюзеляж 13 или же несущие поверхности 3 имеют при виде сверху на летательный аппарат 1 так называемую форму дельты или форму треугольника. Другими словами, стреловидность задних кромок несущих поверхностей 3 является значительно меньшей, чем стреловидность передних кромок. На фюзеляже 13 или же на несущих поверхностях 3 могут быть предусмотрены четыре подъемных несущих винта, которые расположены таким образом, что летательный аппарат 1 может быть приведен в состояние полета 40 в режиме висения. При этом один несущий винт 5 размещен на передней заостренной части и один несущий винт 5 - на заднем выступе фюзеляжа 13. Два других подъемных несущих винта 5 размещены в направлении размаха несущих поверхностей 3 или же в поперечном к направлению полета направлении 60 в каждом случае на обоих концах несущих поверхностей. Для удержания летательного аппарата 1 во время состояния 40 полета в режиме висения в равновесии, подъемные несущие винты 5 могут приводиться в действие существенно различным образом. Другими словами, тяговое усилие каждого из подъемных несущих винтов 5 может быть индивидуально задано таким образом, что наряду с обеспечением состояния равновесия в полете в режиме висения также является возможным наклон летательного аппарата 1, например, вокруг продольного направления 50 или вокруг поперечной оси 60 летательного аппарата 1. Кроме того, на каждой из несущих поверхностей 3 в каждом случае может быть предусмотрен один тяговый привод 9, причем тяговые приводы 9 размещены на соответствующих передних кромках несущих поверхностей 3. Однако тяговые приводы 9 могут быть размещены также и на соответствующих задних кромках несущих поверхностей 3. Тяговые приводы 9, во всяком случае, расположены таким образом, что создается движущая сила в продольном направлении 50 летательного аппарата 1.
На фиг. 15 показан вид сверху на летательный аппарат 1 с несущей конструкцией 27, причем несущая конструкция 27 имеет удлиненный фюзеляж 13, пару несущих поверхностей 3, а также соединительные элементы 47. Соединительные элементы 47, например, в виде штангоподобных элементов или балкоподобных элементы размещены на концах несущих поверхностей 3 пары несущих поверхностей 3 и направлены параллельно продольному направлению 50 или параллельно удлиненному фюзеляжу 13 летательного аппарата 1. На соединительных элементах 47, то есть на штангоподобных элементах, в каждом случае размещены два подъемных несущих винта 5 со смещением в продольном направлении 50 по отношению друг к другу. 3а счет этого четыре подъемных несущих винта 5 создают соответствующую подъемную силу для состояния 40 полета в режиме висения. На фюзеляже 13 размещен тяговый привод 9 для создания движущей силы летательного аппарата 1 в крейсерском полете 41.
Как представлено на фиг. 16, соединительные элементы 47 вместо концов несущих поверхностей 3 могут быть размещены также, например, по центру, на каждой из несущих поверхностей 3. Другими словами, первый соединительный элемент 47 размещен, например, параллельно продольному направлению 50 или параллельно удлиненному фюзеляжу 13 примерно по центру между фюзеляжем 13 и концом первой несущей поверхности пары несущих поверхностей 3 таким образом, что первый конец первого соединительного элемента 47 выступает за переднюю кромку первой несущей поверхности 3, а второй конец первого соединительного элемента 47 - за заднюю кромку первой несущей поверхности 3. Соответствующим образом, второй соединительный элемент 47 размещен параллельно продольному направлению 50 или параллельно удлиненному фюзеляжу 13 примерно по центру между фюзеляжем 13 и концом второй несущей поверхности 3 пары несущих поверхностей 3 таким образом, что первый конец второго соединительного элемента 47 выступает за переднюю кромку второй несущей поверхности 3, а второй конец второго соединительного элемента 47 - за заднюю кромку второй несущей поверхности 3. На соединительных элементах 47, то есть на штангоподобных или балкоподобных элементах, в каждом случае размещены два подъемных несущих винта 5 со смещением в продольном направлении 50 по отношению друг к другу. При этом данные подъемные несущие винты 5 размещены, например, на соответствующих выступающих за несущие поверхности 3 концах обоих соединительных элементов 47 таким образом, что подъемные несущие винты 5 находятся не поверх несущих поверхностей 3, но выступают от них вдоль продольного направления 50 фюзеляжа 13. При этом область поверх несущих поверхностей 3 описывает область над несущими поверхностями 3 по отношению к обычно применяемой в авиастроении вертикальной оси.
Фиг. 17 показывает перспективный вид летательного аппарата с несущей конструкцией 27, содержащей фюзеляж 13, две расположенные последовательно в продольном направлении 50 пары несущих поверхностей 3а, 3b, а также два расположенных параллельно продольному направлению 50 удлиненных или же штангоподобных соединительных элемента 47. Размещенная в передней по отношению к направлению полета или к продольному направлению 50 области удлиненного фюзеляжа 13 пара несущих поверхностей 3а имеет положительную стреловидность, тогда как размещенная в задней области удлиненного фюзеляжа 13 пара несущих поверхностей 3b не имеет никакой стреловидности или имеет меньшую стреловидность по сравнению с размещенной в передней области фюзеляжа 13 парой несущих поверхностей 3а. Например, стреловидность первой пары несущих поверхностей 3а составляет от 20 до 30 градусов. Пары несущих поверхностей 3а, 3b могут быть размещены на фюзеляже 13 по отношению к вертикальной оси летательного аппарата 1 на различных высотах. Другими словами, это означает, что для наблюдателя, направление взгляда которого направлено в продольное направлении 50 или в направлении полета летательного аппарата 1, первая пара несущих поверхностей 3а расположена под второй парой несущих поверхностей 3b. Несущие поверхности обеих пар несущих поверхностей 3а, 3b расположены со смещением вдоль вертикальной оси летательного аппарата 1. На соответствующих концах несущих поверхностей 3а, 3b размещены четыре соединительных элемента 47, которые простираются параллельно продольному направлению 50 фюзеляжа 13. Поскольку несущие поверхности 3а, 3b на первой стороне фюзеляжа, например левой стороне фюзеляжа, размещены на фюзеляже 13 на различных высотах вдоль вертикальной оси, размещенные на концах несущих поверхностей 3а, 3b левой стороны фюзеляжа соединительные элементы 47 также находятся на различных высотах. При этом может быть предусмотрена соединительная деталь 48, которая соединяет друг с другом соединительные элементы 47 на одной стороне фюзеляжа. Соединительная деталь 48 может быть представлена пластинчатым или панельным конструктивным элементом, который содержит, прежде всего, хвостовое оперение 23, такое как, например, вертикальное оперение летательного аппарата 1. При этом образующееся относительно вертикальной оси различие высот расположения обеих пар несущих поверхностей 3а, 3b может быть преодолено за счет выполнения соединительной детали 48 для размещения вертикального оперения. На соединительных элементах 47, в свою очередь, в каждом случае размещены подъемные несущие винты 5. На каждом из четырех соединительных элементов 47 размещен несущий винт 5. 3а счет этого на обеих сторонах удлиненного фюзеляжа 13 два подъемных несущих винта 5 позиционированы со смещением по отношению друг к другу в продольном направлении 50 и направлены таким образом, что сумма созданных ими подъемных сил простирается примерно через центр тяжести летательного аппарата 1, прежде всего, при одновременном равномерном приведении в действие всех подъемных несущих винтов 5. Кроме того, для создания движущей силы летательного аппарата 1 в области кормы удлиненного фюзеляжа 13 предусмотрен тяговый привод 9.
Фиг. 18 показывает перспективный вид выполненной в удлиненной форме гондолы 6 с однолопастным воздушным винтом 7а. На чертеже представлено также направление вращения 70 однолопастного воздушного винта 7а. Однолопастной воздушный винт 7а имеет на своем выступающем над осью 19 несущего винта конце груз 7b, который действует для однолопастного воздушного винта в качестве противовеса. Однолопастной воздушный винт 7а тем самым имеет первый участок между грузом 7b и осью 19 несущего винта и второй участок между концом лопасти однолопастного воздушного винта 7а и осью 19 несущего винта. Два участка однолопастного воздушного винта 7а находятся по различные стороны от оси 19 несущего винта. Первый участок однолопастного воздушного винта 7а охватывает своей длиной, например, от одной четверти до одной трети от общей длины однолопастного воздушного винта 7а, тогда как второй участок однолопастного воздушного винта 7а охватывает своей длиной от двух третей до трех четвертей от общей длины однолопастного воздушного винта 7а. Однолопастной воздушный винт 7а может являться, например, частью подъемного несущего винта 5 летательного аппарата 1, которая обеспечивает подъемную силу летательного аппарата 1 для состояния 40 полета на режиме висения. Однолопастной воздушный винт 7а для состояния 41 крейсерского полета может быть приведен к параллельной выполненной в удлиненной форме гондоле 6 направленности таким образом, что однолопастной воздушный винт 7а неподвижно направлен по существу параллельно направлению полета или продольному направлению 50 летательного аппарата 1. Однолопастной воздушный винт 7а и гондола 6 в таком случае выровнены вдоль одной прямой по отношению друг к другу, что уменьшает аэродинамическое сопротивление во время крейсерского полета летательного аппарата 1. Гондола 6, в свою очередь, может быть размещена на конце несущей поверхности 3. Во время крейсерского полета подъемная сила может быть создана с помощью снабженной создающим динамическую подъемную силу профилем несущей поверхности 3. При этом движущая сила обеспечивается посредством не представленного на фиг. 18 тягового привода.. Показанный на фиг. 18 однолопастной воздушный винт 7а может применяться во всех ранее описанных вариантах осуществления, например, в качестве части подъемного несущего винта 5.
Кроме того, два воздушных винта могут располагаться друг над другом. Это является действительным как для однолопастного воздушного винта, так и для двухлопастного воздушного винта или многолопастного воздушного винта. Нижний воздушный винт может вращаться, например, во время состояния полета в режиме висения с одинаковым и/или также с противоположным направлением вращения по отношению к вышерасположенному воздушному винту. 3а счет противоположных направлений вращения может быть уменьшен разворот относительно продольной оси. В равной мере, могут также быть предусмотрены два расположенных друг над другом воздушных винта в каждом случае с собственным двигателем, вследствие чего может быть повышена избыточность и вместе с тем надежность. При отключении двигателя летательный аппарат 1 сохраняет способность висеть в воздухе. В другом варианте осуществления может быть предусмотрено, что воздушные винты могут размещаться за аэродинамическим обтекателем, например, посредством втягивания в гондолу 6 таким образом, что сопротивление может быть дополнительно уменьшено. Для этого в гондолах 6 могут быть предусмотрены, например, створки, которые могут запираться после втягивания воздушных винтов в гондолы 6.
В другом варианте осуществления воздушный винт может быть закреплен шарнирным образом. Это может быть выгодным, прежде всего, при прямолинейном горизонтальном полете летательного аппарата 1, поскольку таким образом на летательный аппарат 1 не передаются какие-либо моменты крена вследствие асимметричности набегающего потока на воздушных винтах. Кроме того, образующиеся в лопасти воздушного винта моменты изгиба в этом случае меньше нагружают втулку несущего винта, поскольку моменты изгиба остаются в лопасти. Это относится как к двухлопастному воздушному винту, так и к однолопастному воздушному винту.
Варианты осуществления предложенного летательного аппарата 1 могут быть выполнены с очень легкой конструкцией, прежде всего, по сравнению с обычными выполненным с возможностью вертикального взлета летательными аппаратами, и одновременно, открывают возможность высоких крейсерских скоростей полета. Подобная мультикоптеру форма выполнения с несколькими подъемными несущими винтами может сделать возможной простой и эффективный способ полета в режиме висения. Кроме того, обеспечивается простой способ перехода от вертикального к горизонтальному режиму полета. Предусмотренные для этого системы управления и алгоритмы управления могут быть выполнены относительно простыми. Предложенное решение летательного аппарата может быть реализовано с помощью простых, малозатратных и прочных приводных двигателей и механизмов передачи мощности. Например, подъемные несущие винты могут приводиться в действие с помощью простых, регулируемых только по числу их оборотов электродвигателей. Тяговый привод может приводиться в действие с помощью простого двигателя произвольного типа, и может обладать существенно менее значительной мощностью по сравнению с обычными летательными аппаратами, поскольку, прежде всего, при взлете летательного аппарата отсутствует необходимость в выполнении максимального тягового усилия в горизонтальном направлении. В целом, предложенный летательный аппарат может иметь высокую полезную грузоподъемность.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2658736C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2652868C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| МНОГОВИНТОВОЙ ТЯЖЕЛЫЙ КОНВЕРТОВИНТОКРЫЛ | 2013 |
|
RU2521121C1 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| КОНВЕРТОПЛАН (ВАРИАНТЫ) | 2010 |
|
RU2446078C2 |
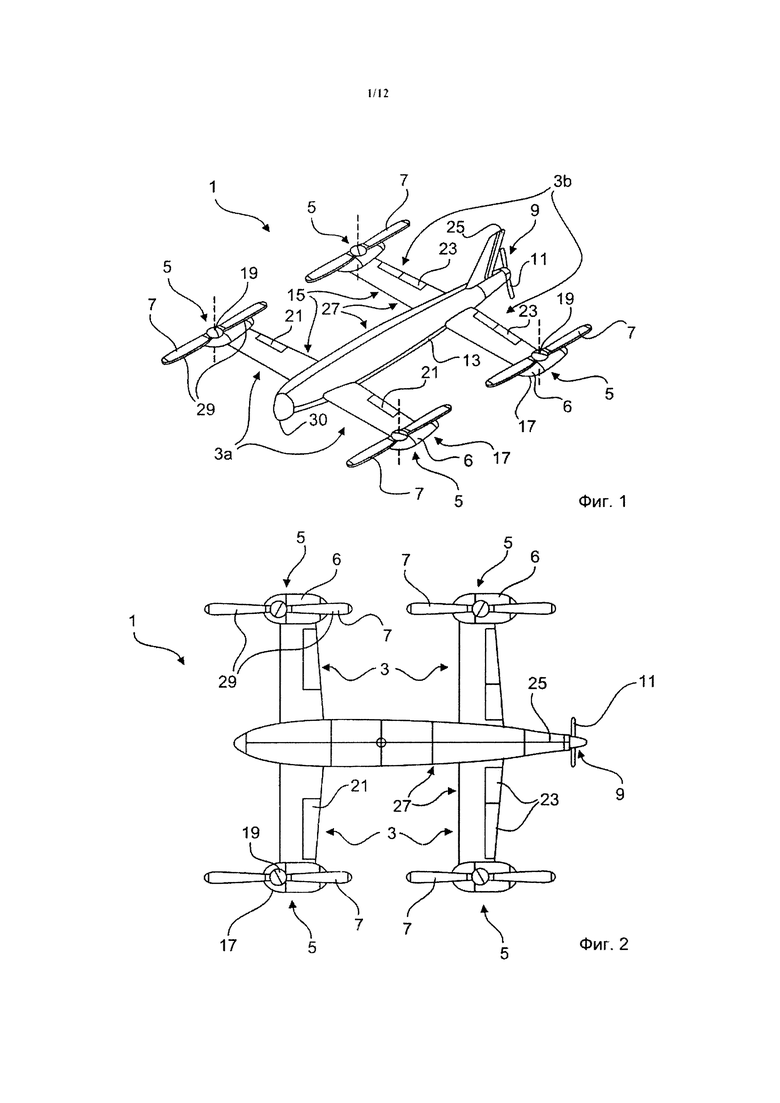
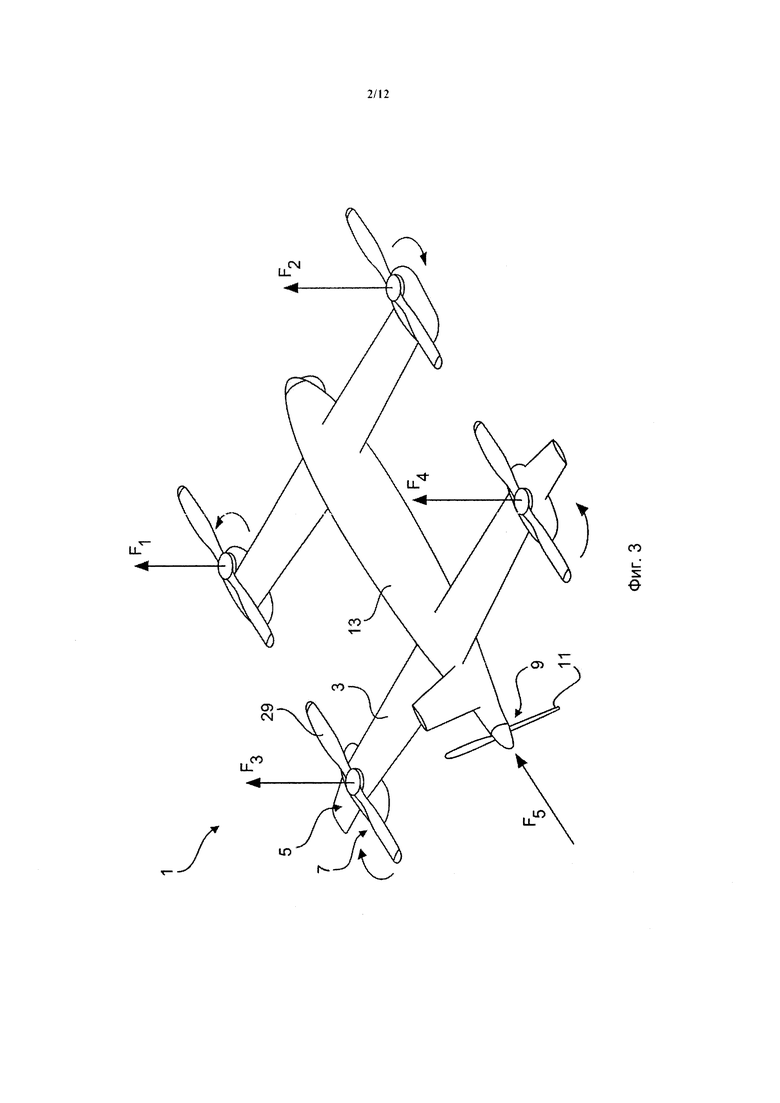
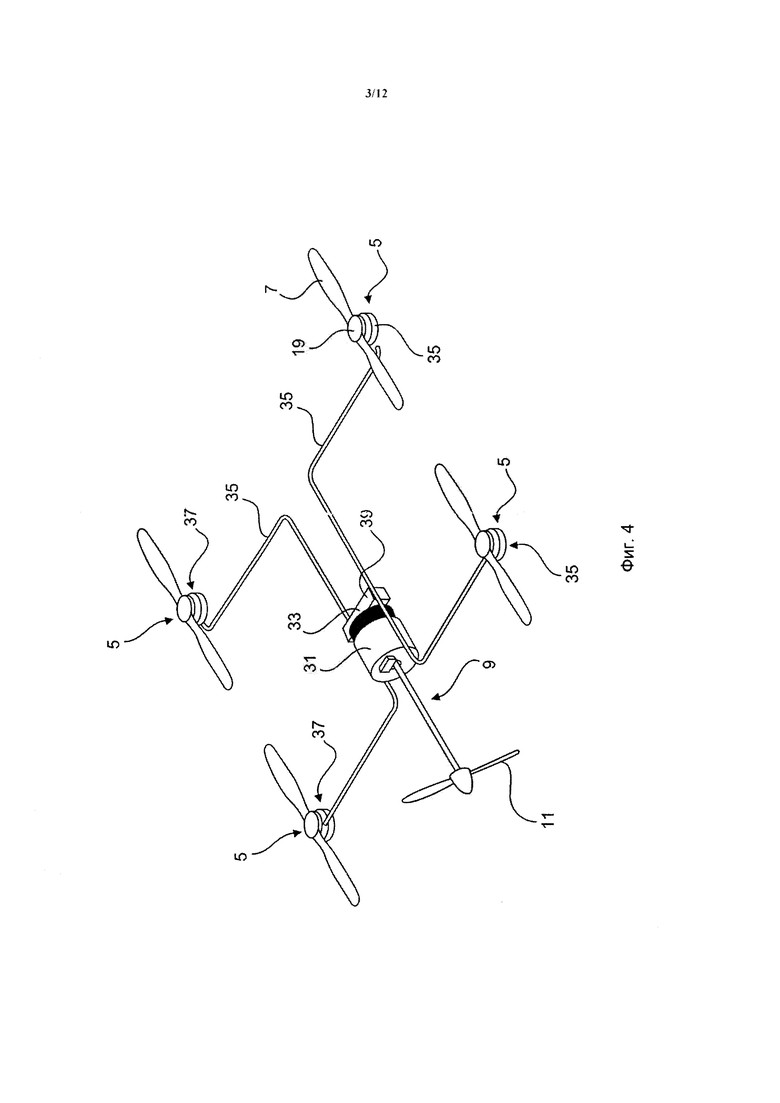
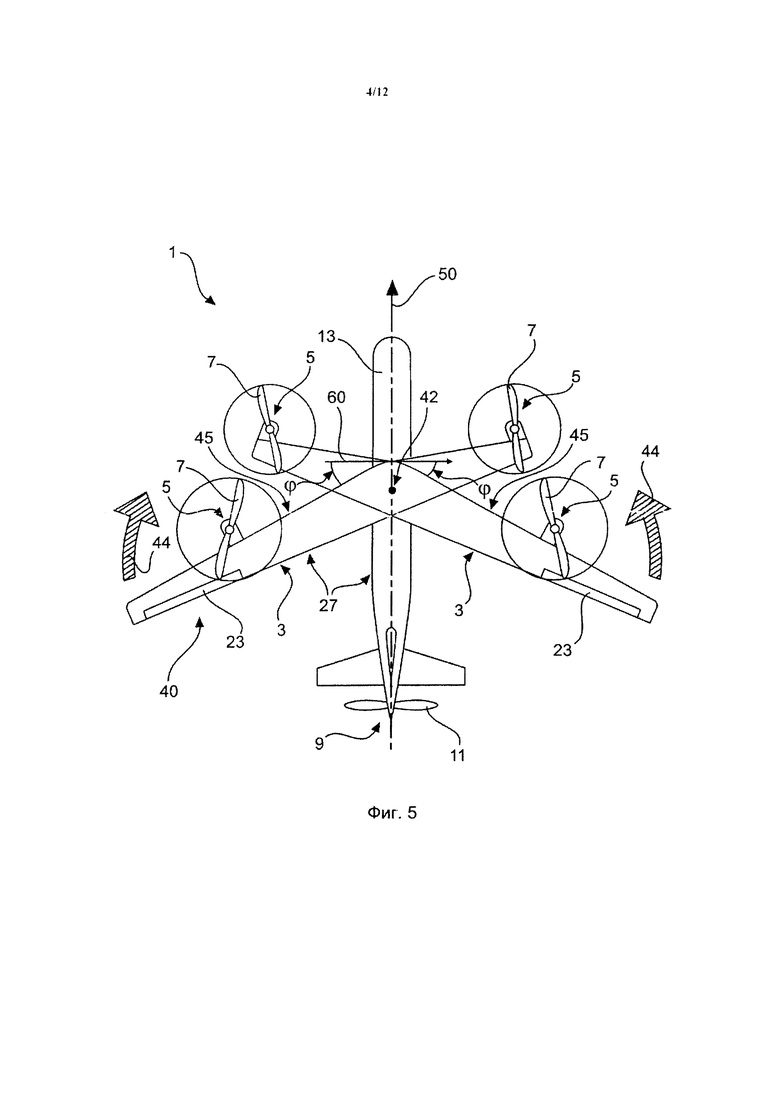
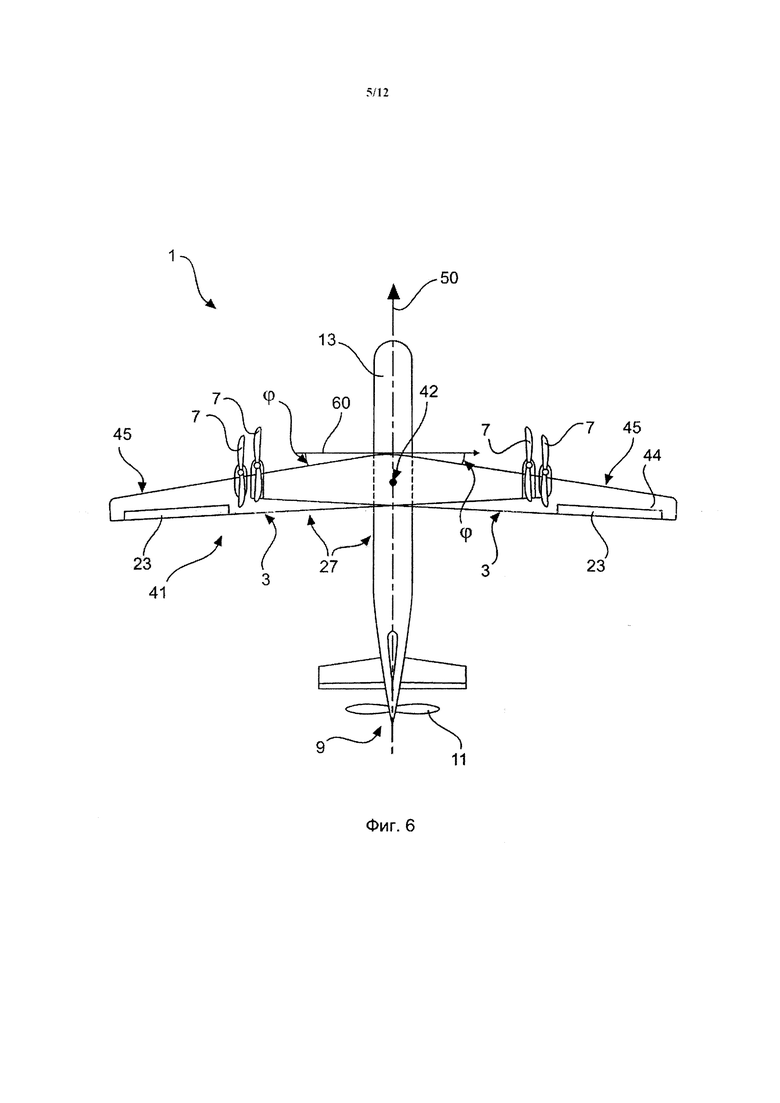
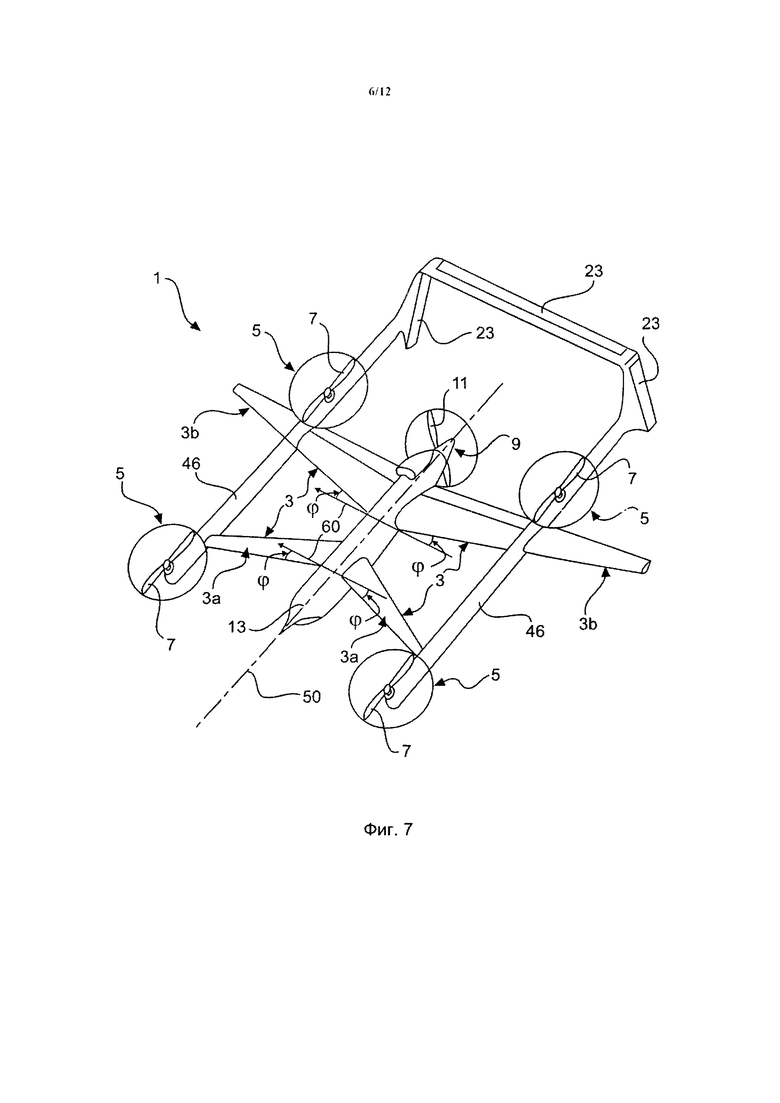
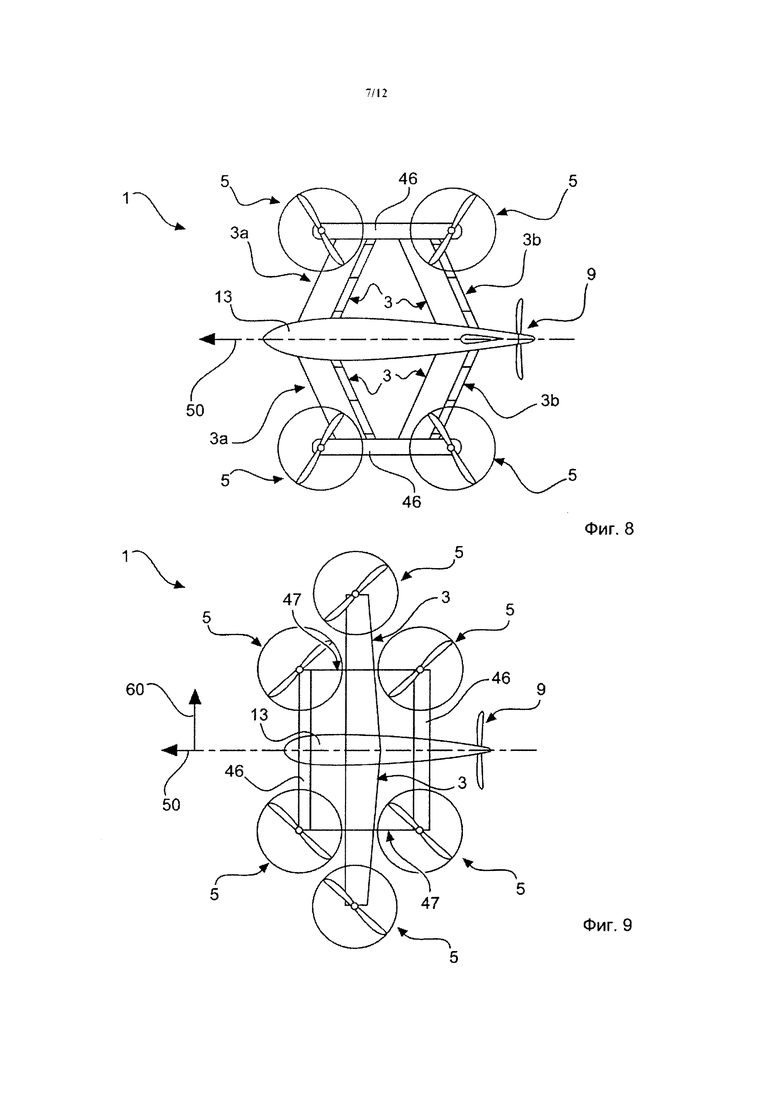
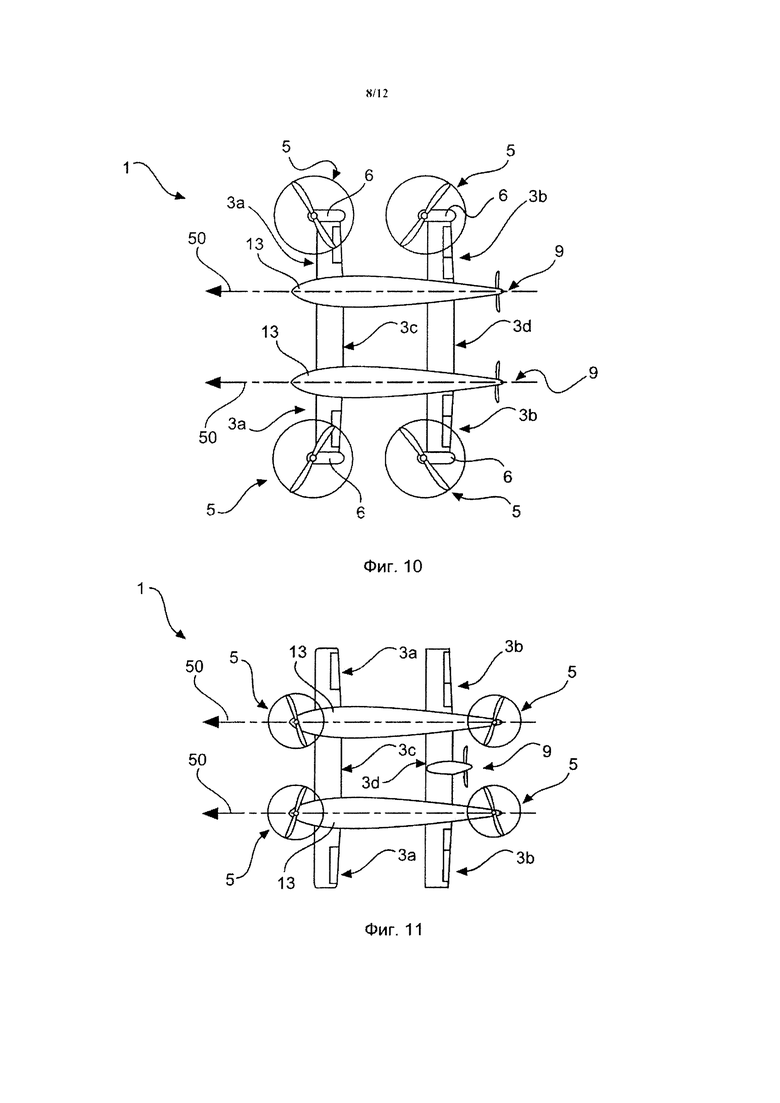
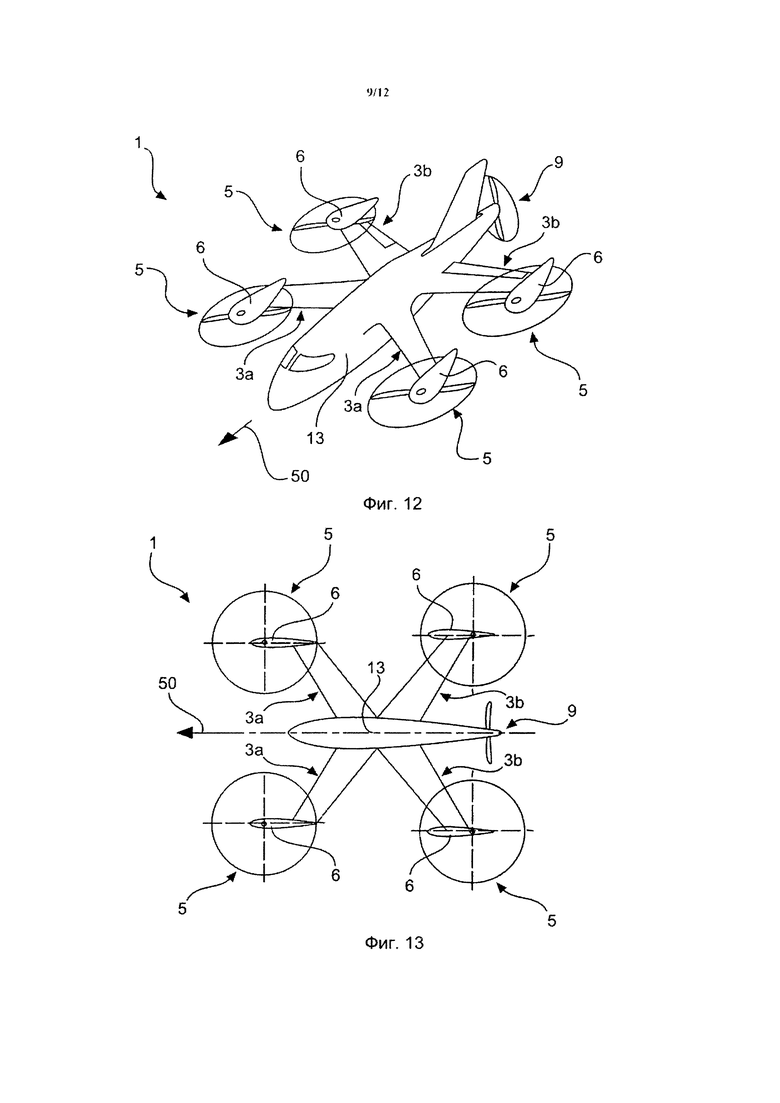
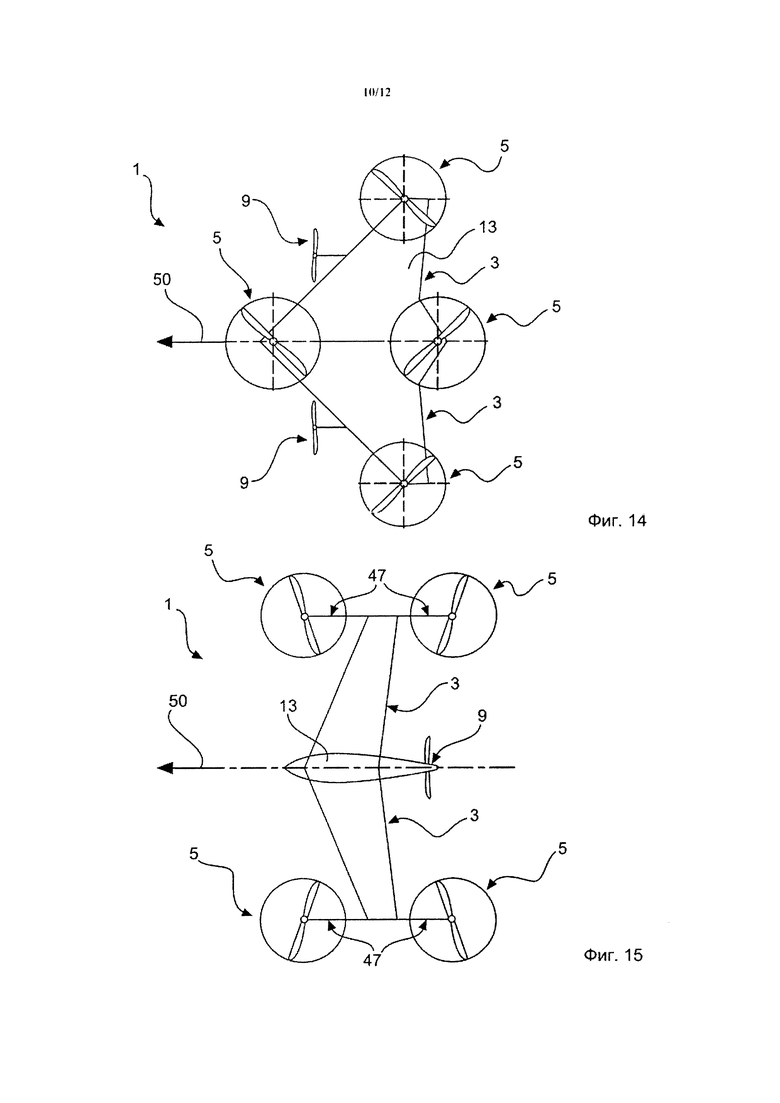
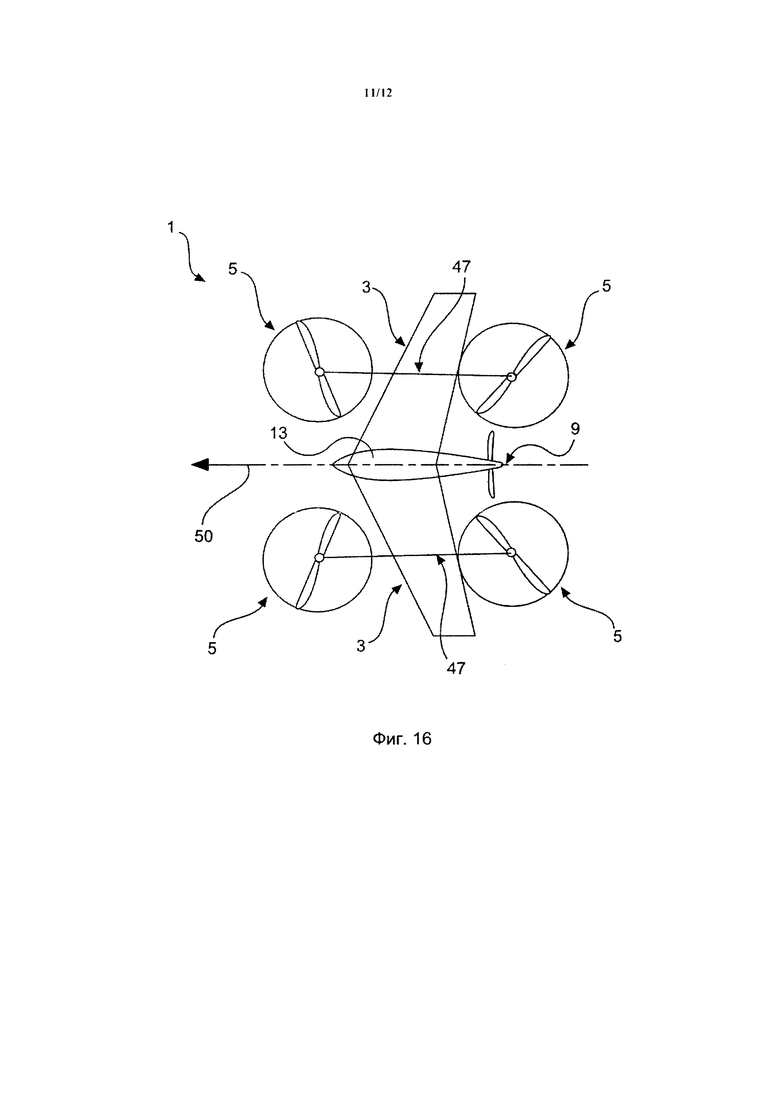
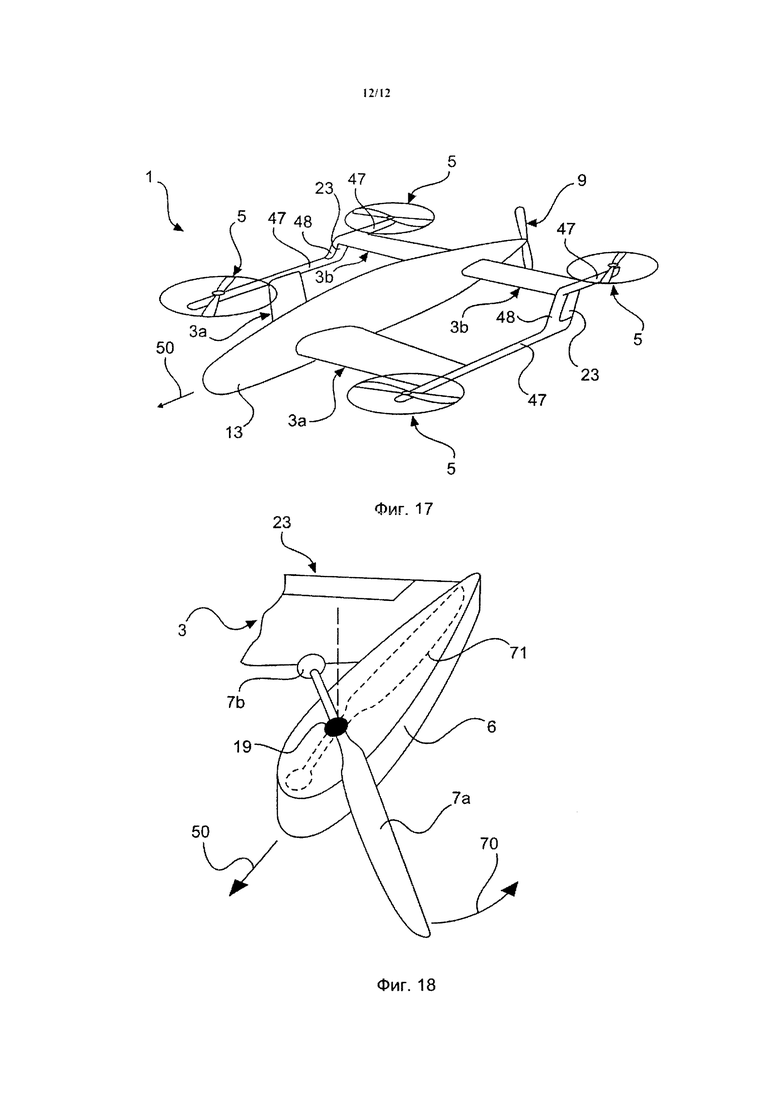
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов вертикального взлета и посадки. Летательный аппарат (1) имеет несущую конструкцию (27), крыльевую конструкцию (15), четыре подъемных несущих винта (5) и один тяговый привод (9). Крыльевая конструкция (15) имеет по меньшей мере одну несущую поверхность (3), которая снабжена создающим динамическую подъемную силу профилем. Предпочтительно, крыльевая конструкция (15) выполнена в виде тандемной крыльевой конструкции. Каждый из подъемных несущих винтов (5) закреплен на несущей поверхности (3), имеет воздушный винт (7) и выполнен для создания посредством вращения воздушного винта (7) действующей в вертикальном направлении подъемной силы для летательного аппарата (1). Несущие поверхности установлены с возможностью поворота относительно несущей конструкции вокруг нормальной оси летательного аппарата для изменения угла между передней кромкой поверхности и поперечной осью летательного аппарата. В режиме висения несущие поверхности находятся в повернутом состоянии. Обеспечивается возможность изменять положение точки действия результирующей подъемной силы вдоль продольной оси. 19 з.п. ф-лы, 18 ил.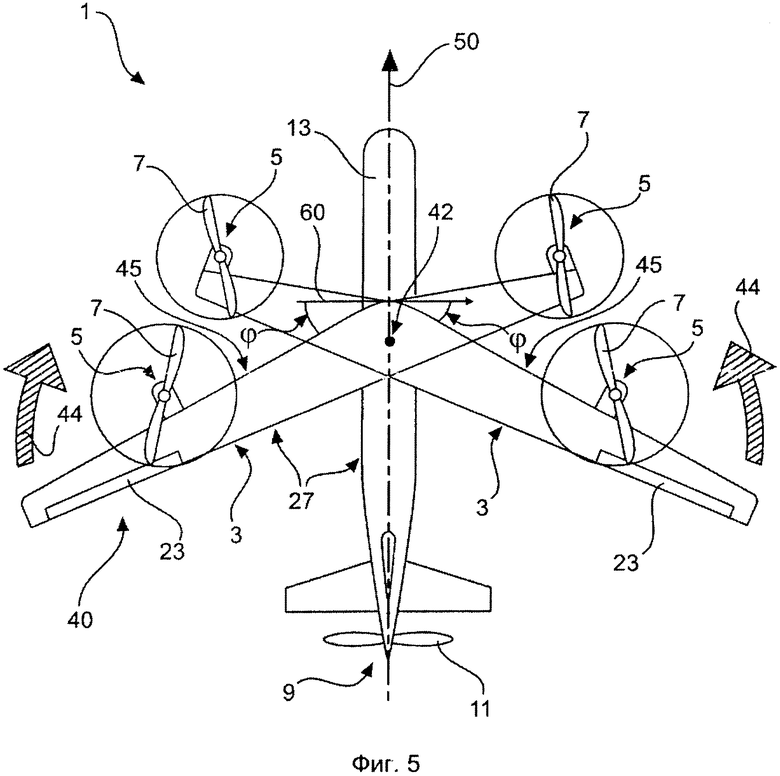
1. Летательный аппарат (1), имеющий несущую конструкцию (27), крыльевую конструкцию (15), по меньшей мере три подъемных несущих винта (5) и по меньшей мере один тяговый привод (9), причем:
- крыльевая конструкция (15) закреплена на несущей конструкции (27),
- крыльевая конструкция (15) выполнена для создания подъемной силы для летательного аппарата при горизонтальном перемещении летательного аппарата (1) и для этого имеет по меньшей мере одну несущую поверхность (3), которая снабжена создающим динамическую подъемную силу профилем,
- каждый из подъемных несущих винтов (5) закреплен на несущей поверхности, имеет воздушный винт (7) и выполнен для создания посредством вращения воздушного винта (7) действующей в вертикальном направлении подъемной силы (Fl, F2, F3, F4) для летательного аппарата (1),
- воздушный винт (7) выполнен однолопастным или имеет строго две лопасти (29),
- тяговый привод (9) выполнен для создания действующей на несущую конструкцию (27) в горизонтальном направлении силы (F5) тяги,
- по меньшей мере одна несущая поверхность установлена с возможностью поворота или вращения относительно несущей конструкции вокруг нормальной оси летательного аппарата для изменения угла между передней кромкой по меньшей мере одной несущей поверхности и поперечной осью летательного аппарата,
- на несущей конструкции (27) установлена с возможностью поворота вокруг нормальной оси летательного аппарата вторая несущая поверхность (3), и
- по меньшей мере одна (3) несущая поверхность и вторая несущая поверхность (3) для полета в режиме висения находятся в повернутом состоянии.
2. Летательный аппарат по п. 1, причем несущая конструкция (27) выполнена совместно с крыльевой конструкцией (15) в виде тандемной крыльевой конструкции с удлиненным фюзеляжем (13) и двумя последовательно расположенными в горизонтальном направлении парами выступающих поперечно от фюзеляжа несущих поверхностей (3).
3. Летательный аппарат по п. 2, причем на каждой несущей поверхности (3) расположен в каждом случае один из подъемных несущих винтов (5).
4. Летательный аппарат по п. 2 или 3, причем на каждой несущей поверхности (3) расположена гондола (6), на которой расположен в каждом случае один из подъемных несущих винтов (5).
5. Летательный аппарат по п. 2, причем на каждой из несущих поверхностей (3) расположено хвостовое оперение (21, 23).
6. Летательный аппарат по п. 1, причем подъемные несущие винты (5) выполнены таким образом, что плоскость вращения, в которой вращаются лопасти (29) винта подъемного несущего винта (5), является стационарной по отношению к приводимой в действие двигателем оси (19) несущего винта подъемного несущего винта (5).
7. Летательный аппарат по п. 1, причем лопасти (29) воздушного винта подъемного несущего винта (5) неподвижно соединены с осью (19) несущего винта.
8. Летательный аппарат по п. 1, причем лопасти (29) воздушного винта подъемного несущего винта (5) с возможностью поворота соединены с осью (19) несущего винта таким образом, что наклон лопастей (29) воздушного винта может быть изменен.
9. Летательный аппарат по п. 1, имеющий по меньшей мере четыре подъемных несущих винта (5).
10. Летательный аппарат по п. 1, причем сумма создаваемых подъемными несущими винтами подъемных сил (F1, F2, F3, F4) проходит по существу через центр тяжести летательного аппарата (1) и нейтральная точка крыльевой конструкции (15) является приспособленно для горизонтального полета позиционируемой относительно центра тяжести летательного аппарата (1).
11. Летательный аппарат по п. 1, причем подъемные несущие винты (5) выполнены для стопорения соответствующих лопастей (29) воздушного винта подъемного несущего винта (5) в заданном относительно несущей конструкции (27) положении.
12. Летательный аппарат по п. 1, причем подъемные несущие винты (5) и тяговый привод (9) приводятся в действие посредством управляемых независимо друг от друга двигателей (31, 35).
13. Летательный аппарат по п. 1, причем каждый из подъемных несущих винтов (5) приводится в действие электродвигателем (35).
14. Летательный аппарат по п. 1, причем тяговый привод (9) приводится в действие посредством двигателя внутреннего сгорания (31), и двигатель внутреннего сгорания (31) соединен с генератором (33) для поставки электрической энергии к электродвигателям (35) подъемных несущих винтов (5).
15. Летательный аппарат по п. 1, причем по меньшей мере одна несущая поверхность (3) и вторая несущая поверхность (3) для крейсерского полета находятся в повернутом в исходное положение состоянии, в котором передние кромки (45) несущих поверхностей (3) выровнены по отношению друг к другу вдоль одной прямой.
16. Летательный аппарат по п. 1, причем несущая конструкция (27) совместно с крыльевой конструкцией (15) выполнена в виде тандемной крыльевой конструкции с удлиненным фюзеляжем (13) и двумя расположенными последовательно в горизонтальном направлении парами выступающих от фюзеляжа (13) несущих поверхностей (3).
17. Летательный аппарат по п. 16, причем первая пара несущих поверхностей (3а) имеет первую стреловидность, которая отличается от второй стреловидности второй пары несущих поверхностей (3b).
18. Летательный аппарат по п. 16 или 17, причем первая пара несущих поверхностей (3а) и вторая пара несущих поверхностей (3b) соединены друг с другом посредством по меньшей мере одной соединительной структуры (46).
19. Летательный аппарат по п. 18, причем по меньшей мере одна соединительная структура (46) имеет удлиненную форму и направлена параллельно удлиненному фюзеляжу (13) и причем по меньшей мере одна соединительная структура (46) имеет хвостовое оперение (23).
20. Летательный аппарат по п. 17, причем первая пара несущих поверхностей (3a) и вторая пара несущих поверхностей (3b) в вертикальном направлении расположены со смещением по отношению друг к другу.
| US 2006151666 A1, 13.07.2006 | |||
| US 3181810 A, 04.05.1965 | |||
| WO 2006113877 A2, 26.10.2006 | |||
| US 20130020429 A1, 24.01.2013 | |||
| US 6293491 B1, 25.09.2001 | |||
| RU 2001836 C1, 30.10.1993 | |||
| US 20040245374 A1, 09.12.2004. |

