ел
с

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| Стенд для исследования напряженного состояния рельсов, дефектов рельсов и колес подвижного состава | 2021 |
|
RU2755595C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670570C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661674C1 |
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1988 |
|
SU1791704A2 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2698106C1 |
| Способ контроля состояния длинномерного объекта | 1987 |
|
SU1791702A2 |
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1987 |
|
SU1791757A2 |
| Способ контроля состояния длинномерного объекта | 1987 |
|
SU1791703A2 |
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1987 |
|
SU1742615A1 |
Изобретение относится к контрольно- измерительной технике. Цель изобретения - расширение функциональных возможностей контроля за счет одновременного определения состояния грузонесущей конструкции и параметров перемещающейся по ее поверхности нагрузки-достигается посредством того, что с помощью волновода фиксируют распределение кривизны и из- гибной жесткости по длине конструкции, затем в процессе,эксплуатации конструкции определяют ее напряженно-деформированное состояние путем измерения возникающих деформаций, одновременно по известной изгибной жесткости и деформациям конструкции получают распределение величины нагрузки, скорость и ускорение перемещения нагрузки вдоль конструкции. 2 с.п.ф-лы, 2 ил.
Изобретение относится к контрольно-измерительной технике, а точнее к контролю механических параметров длинномерных грузонесущих конструкций (рельсовых нитей железнодорожного полотна, монорельсов, канатных подвесных дорог) и я вляется усовершенствованием изобретения по авт.св. № 1742615.
Целью дополнительного изобретения является расширение функциональных возможностей контроля за счет одновременного определения состояния грузонесущей конструкции и параметров перемещающейся по ее поверхности нагрузки,
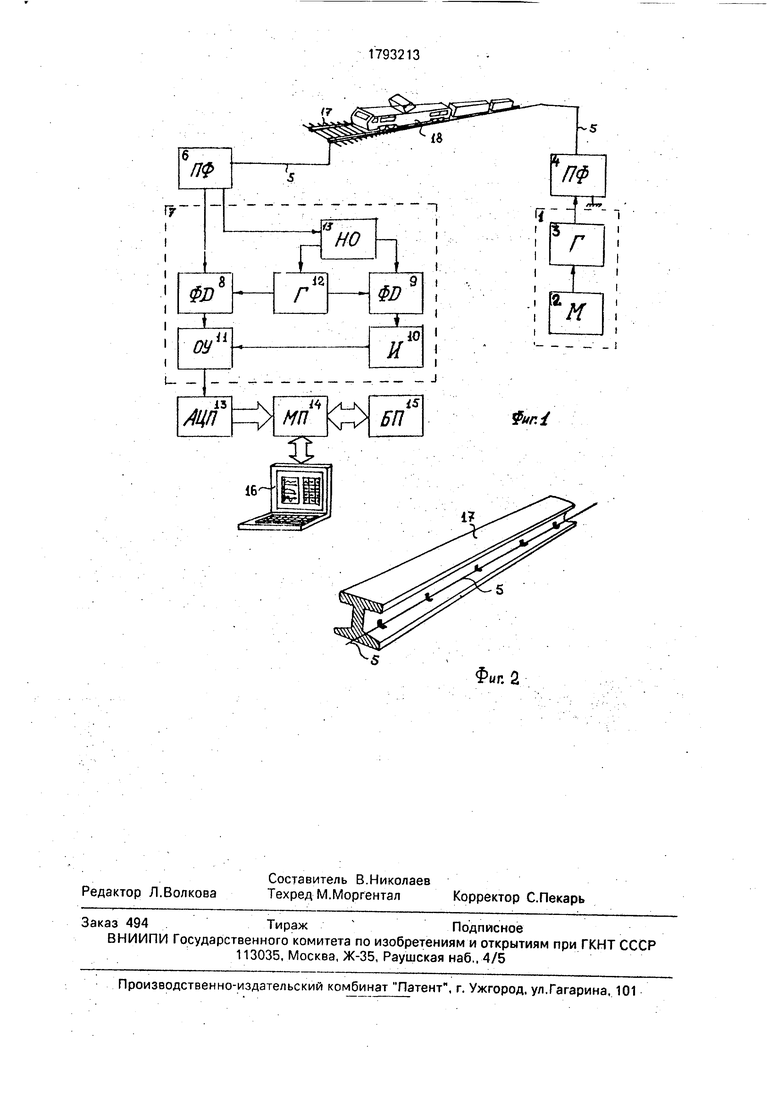
На фиг.1 приведена функциональная схема устройства, реализующего способ контроля состояния длинномерного объекта; на фиг.2 - элемент грузонесущей конструкции с закрепленным волноводом.
Устройство содержит последовательно соединенные источник Г модулированной волновой энергии, выполненный, например, в виде связанных между собой генератора 3 оптического диапазона, первый пространственный фильтр 4, канал 5 передачи волновой энергии в виде волновода, второй пространственный фильтр 6 и демодулятор, выполненный ввидедвухсинхро- ных фотодетекторов 8 и 9, подключенных к выходам второго пространственного фильтра 6, интегратора 10, подключенного к выходу детектора 9 и связанного с выходами интегратоар 10 и второго детектора 8, операционного усилителя 11, выход которого является выходом демодулятора 7.
В состав демодулятора 7 входит генератор 12 сигналов, синхронизированный через направленный ответвйтель 13 с
VJ
Ч
СА)
го
(А)
ю
сигналом опорной моды на выходе пространственного фильтра 6, выход генератора 12 подключен на вторые выходы фотодетекторов 8 и 9.
Кроме того, в состав устройства для кон- троля состояния длинномерного объекта входят аналого-цифровой преобразователь (АЦП) 13, микропроцессор 14 и блок 15 памяти, соединенные последовательно, причем вход АЦП 13 подключен к выходу демодулятора 7, а также видеотерминал 16, соединенный с выходом микропроцессора 14.
Длинномерным объектом в примере реализации способа выступает грузонесущая конструкция в виде рельса 17 (фиг,2) по которому перемещается распределенная нагрузка, а именно - железнодорожный состав 18.
Волновод 5 должен быть выполнен по меньшей с одной опорной и одной измерительной, взаимодействующими в зависимости от кривизны его оси, модами.
Способ контроля состояния длинномерного объекта осуществляется следующим образом. ....
В начале контроля в источнике 1 модулированной волновой энергии модулятор 2 вырабатывает последовательность импульсов, модулирующих высокочастотные коле- бания генератора 3 оптического излучения. Длительность и период повторения моделирующих импульсов определяются требуе- мыми параметрами контроля - динамическим диапазоном изменения кон- тролируемого параметра (в данном случае кривизны поверхности рельса 17), разрешающей способностью контроля по длине объекта, а также параметрами волновода 5. На выходе генератора 3 формируется импульс- мая последовательность оптических когерентных колебаний. Эта последовательность когерентных колебания поступает на вход пространственного фильтра 4. В .этом фильтре4 происходит преобразование пространственной структуры оптического поля так, чтобы на входе волновода 5 эта структура соответствовала требуемой структуре по меньшей мере одной опорной моды. Так формируется и подается в волно- вод 5 опорная мода. Распространяясь по волноводу 5, опорная мода возбуждает измерительную моду с погонным коэффициентом взаимодействия между организованными модами, пропорциональным изменению кривизны оси волновода 5. Следовательно, измерительная мода также импульсный сигнал, когерентный с сигналом опорной моды. За счет заранее созданного разного замедления фазовых скоростей
опорной и измерительной мод в волноводе 5 обеспечивается распространение мод с различными скоростями, что далее создает возможность с помощью масштабного преобразования перейти в демодуляторе 7 от временной координаты в сигнале, соответствующем распределению кривизны,к пространственной вдоль волновода 5. Проходя через пространственный фильтр 6, опорная и измерительная моды разделяются в пространстве и поступают на первые входы соответственно синхронных фотодетекторов 9 и 8. Эти входы являются входами демодулятора 7. Направленный от- ветвитель 13 отделяет некоторую часть энергии опорной моды с первого входа синхронного фотодетектора 9 для синхронизации генератора 12. Остальная часть энергии передается на первый вход синхронного фотодетектора 9. Одновременно на вторые входы синхронных фотодетекторов 8 и 9 подается сигнал генератора 12 в виде когерентного с сигналом опорной моды СВЧ-поля, за счет чего осуществляются синхронные (с сохранением знака огибающей импульсов измерительной моды) детектирование оптических полей. На выходах синхронных детекторов 8 и 9 появляются таким образом электрические сигналы. Причем сигнал на выходе синхронного фотодетёктора 9 пропорционален огибающей сигнала опорной моды, а сигнал на выходе синхронного фотодетектора 8 пропорционален с учетом знака огибающей сигналу измерительной моды, который в свою очередь является отображением распределения приращения кривизны вдоль оси волновода 5 или поверхности рельса 17,
Электрические импульсы опорного сигнала с выхода синхронного фотодетектора 9 поступают на вход интегратора 10, на выходе которого образуется электрический сигнал, соответствующий амплитуде входного импульсного сигнала (сигнал интегральный амплитуды). Сигнал с выхода интегратора 10 подается на первый вход операционного усилителя 11, на второй вход которого подается измерительный сигнал с выхода син- хронного фотодетёктора 8. На выходе операционного усилителя 11, осуществляющего также интегрирование, снимается электрический сигнал, величина которого определяется величиной интеграла от приращения кривизны вдоль оси волновода 5 и не зависит от величины опорного сигнала. С выхода операционного усилителя 11, являющегося выходом демодулятора 7, сигнал, пропорциональный распределению кривизны рельса 17, поступает на вход АЦП 13. В АЦП 13 этот сигнал преобразуется в цифровой код, который поступает на вход микропроцессора 14. В последнем производится цифровая обработка распределения кривизны рельса 17 сначала для определения изгибной жесткости рельса 17с учетом подстилающей поверхности при прохождении железнодорожного состава 18 с известным весом и известной длиной. Полученная из- гибнэя жесткость в виде распределения по длине рельса 17 с выхода микропроцессора 14.передается и записывается в блоке 15 памяти. По распределению текущей кривизны, изгибной жесткости рельса 17, скорости и ускорению перемещения контролируемого состава 18 (определяемым по скорости и ускорению перемещения деформаций) в
Формулаизо.бретения 1. Способ контроля состояния длинномерного объекта по авт.св. № 1742615, отличающийся тем, что, с целью расширения функциональных возможностей контроля за счет одновременного определения состояния грузонесущей конструкции и параметров перемещающейся по ее поверхности нагрузки, в волноводе, реагирующем на изменение кривизны его оси, создают разные замедления фазовых скоростей опорных и наиболее информативных по кривизне конструкции мод, перемещения по поверхности конструкции заранее заданную нагрузку, с помощью волновода фиксируют распределение кривизны и соответственно изгибной жесткости по длине конструкции, затем в процессе эксплуатации конструкции определяют ее напряженно-деформированное состояние за счет измерения возникающих деформаций, а также одновременно по известной изгибной жесткости и деформациям конструкции получают распределение величины нагрузки, скорость и ускорение ее перемещения вдоль конструкции.
микропроцессоре 14 определяются вес состава 18 и его распределение по длине, прогнозируется местонахождение состава 18 через заданное время и определяется напряженно-деформированное состояние рельса 17. Результаты обработки с выхода микропроцессора 14 поступают для отображения на вход видеотерминала 16.
Волновод 5 целесообразно выполнять в
виде волоконного по меньшей мере двух- модового световода с изолирующей и защитной оболочками с кварцевыми или полимерными волокнами. Волновод 5 закрепляется на поверхности рельса 17. неконтактирующей с железнодорожным составом 18.
| Способ контроля состояния длинномерного объекта и устройство для его осуществления | 1987 |
|
SU1742615A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
