Область техники
Настоящее изобретение относится к системе и способу распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, которые, в частности, применимы к определению характера движения стального проволочного троса в шахтной подъемной системе или системе тяги лифта, а также применимы к определению характера движения различных стальных проволочных тросов.
Уровень техники
Наматывающие подъемные устройства широко применяют в шахтных подъемных системах. Для обеспечения безопасной и эффективной работы шахтной подъемной системы огромное значение имеет определение рабочего состояния стального проволочного троса на крутильном ролике. Однако до настоящего времени отсутствует эффективный способ распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, в режиме реального времени. Соответственно, невозможно определить цилиндричность ролика, контролировать спутанное состояние стального проволочного троса на ролике или определить скорость подъемного контейнера в режиме реального времени. Такая ситуация представляет потенциальную угрозу для безопасности и эффективной работы в угольных шахтах.
Раскрытие сущности изобретения
Техническая задача
Для решения вышеупомянутых проблем известного уровня техники предлагается система и способ распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, которые позволяют решать задачу распознавания характера движения стального проволочного троса во время работы крутильного ролика и осуществлять в режиме реального времени визуальный контроль характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос.
Техническая схема
Предложенная система распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, содержит камеру I для технической съемки, установленную с задней стороны ролика перпендикулярно его оси, камеру II для технической съемки, установленную с правой стороны ролика параллельно его оси, причем камера I для технической съемки и камера II для технической съемки соответственно соединены кабелем связи с промышленным ПК, устройство измерения осевой скорости стального проволочного троса установлено на стальном проволочном тросе, который намотан на ролик, переброшен через подъемный шкив и проходит вертикально вниз, и устройство измерения осевой скорости стального проволочного троса соединено посредством проводов с блоком сбора данных.
Устройство измерения осевой скорости стального проволочного троса содержит U-образное основание, установленное на стальной проволочный трос, причем слева и справа от стального проволочного троса на U-образном основании симметрично расположены узел измерения скорости и прижимной узел, которые содержат основание, расположенное на U-образном основании соответственно, причем с передней и задней сторон основания симметрично расположены поддерживающие кронштейны, между которыми посредством пальца в нижней части расположен регулирующий узел, в верхней части поддерживающих кронштейнов при помощи опорного стержня расположены фрикционные колеса, обхватывающие стальной проволочный трос, причем с двух сторон опорного стержня симметрично расположены подшипник и втулка вала, установленные на поддерживающих кронштейнах; а узел измерения скорости дополнительно содержит датчик углового положения вала, соединенный с опорным стержнем посредством муфты.
На датчике углового положения вала выполнена опора датчика, прикрепленная к одной стороне поддерживающих кронштейнов.
Основание, расположенное на U-образном основании, жестко соединено посредством Т-образного болтового соединения.
В верхней части поддерживающих кронштейнов с двух сторон обеспечены торцевые крышки подшипников.
На фрикционном колесе выполнена износостойкая резиновая оболочка.
Способ распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, при помощи вышеописанной системы включает следующие этапы:
(1) определение характера движения наматывания или разматывания стального проволочного троса в горизонтальном направлении и вертикальном направлении на ролике:
а. измерение фактической ширины D1 ролика и ширины d1 изображения ролика на изображении, полученном при помощи камеры I для технической съемки, установленной с задней стороны ролика, соответственно, и расчет коэффициента Z1=D1/d1 преобразования камеры I для технической съемки;
измерение фактической ширины D2 стального проволочного троса и ширины d2 изображения стального проволочного троса на изображении, полученном при помощи камеры II для технической съемки, установленной с правой стороны ролика, соответственно, и расчет коэффициента Z2=D2/d2 преобразования камеры II для технической съемки;
b. непрерывное получение изображений движения стального проволочного троса в двух направлениях, в точке В измерения, где стальной проволочный трос появляется из-за обода ролика над точкой А выхода касательной линии стального проволочного троса на ролике, при помощи камеры I для технической съемки, расположенной перпендикулярно оси ролика, и камеры II для технической съемки, расположенной параллельно оси ролика;
c. обработка при помощи промышленного ПК изображений, полученных посредством камеры I для технической съемки и камеры II для технической съемки соответственно, и получение скорости перемещения стального проволочного троса в горизонтальном направлении, когда трос сходит с ролика, а также в горизонтальном направлении и вертикальном направлении, когда трос сходит с ролика в направлении, перпендикулярном направлению стального проволочного троса;
(2) определение осевой скорости стального проволочного троса:
а. прекращение работы подъемной системы,
установка устройства измерения осевой скорости стального проволочного троса,
установка U-образного основания на стальной проволочный трос ниже подъемного шкива таким образом, чтобы стальной проволочный трос проходил через U-образное основание;
установка узла измерения скорости и прижимного узла симметрично с двух сторон стального проволочного троса таким образом, чтобы два фрикционных колеса упирались в стальной проволочный трос,
закрепление узла измерения скорости и прижимного узла к U-образному основанию и
регулирование регулирующего узла таким образом, чтобы достичь заданного значения прижимной силы между двумя фрикционными колесами и стальным проволочным тросом;
b. начало работы подъемной системы так, что
перемещающийся стальной проволочный трос приводит во вращение фрикционные колеса,
фрикционные колеса посредством шпонки на лыске приводят в действие опорный стержень,
опорный стержень посредством муфты приводит в действие датчик углового положения вала,
датчик углового положения вала передает сигналы движения блоку сбора данных, который передает эти сигналы через свой модуль беспроводной связи промышленному ПК, а
промышленный ПК получает сигналы и вычисляет осевую скорость стального проволочного троса в режиме реального времени при помощи программного обеспечения верхнего вычислительного устройства.
Для получения скорости перемещения стального проволочного троса в горизонтальном направлении и в вертикальном направлении при сходе троса с ролика изображения схода стального проволочного троса предварительно обрабатывают посредством затенения и пороговой обработки, а полученные изображения стального проволочного троса и фоновые изображения маркируют разными цветами для отделения их друг от друга;
на изображениях схода стального проволочного троса, обработанных посредством пороговой обработки, горизонтальную линию, перпендикулярную стальному проволочному тросу 4, выбирают в положении В над роликом в качестве реперной линии, а средние значения горизонтальной координаты и вертикальной координаты, которые представляют все пиксели стального проволочного троса на реперной линии, принимают в качестве координаты (х, у) перемещающегося стального проволочного троса в горизонтальном направлении и вертикальном направлении;
относительные скорости перемещения стального проволочного троса в горизонтальном направлении и вертикальном направлении получают посредством взятия производной координат стального проволочного троса, получаемых непрерывно, по времени t, т.е. vx=dx/dt, vy=dy/dt;
затем получают фактические скорости перемещения стального проволочного троса в горизонтальном направлении и вертикальном направлении посредством вычисления с учетом параметров и коэффициентов преобразования, т.е. Vx=vx⋅Z1, Vy=vy⋅Z2.
Обеспечиваемые технические результаты
Благодаря вышеописанной технической схеме предложенные система и способ могут обеспечивать распознавание характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, в режиме реального времени, определять цилиндричность ролика, контролировать спутанное состояние стального проволочного троса на ролике и контролировать скорость подъемного контейнера в режиме реального времени. Система и способ позволяют решать задачу распознавания характера движения стального проволочного троса во время работы крутильного ролика, осуществлять в режиме реального времени визуальный и интеллектуальный контроль характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, и обеспечивать безопасное и эффективное производство в угольных шахтах. Система и способ, в частности, применимы к определению характера движения стального проволочного троса в шахтной подъемной системе или системе тяги лифта, а также применимы к определению характера движения различных стальных проволочных тросов. Система имеет простую конструкцию, проста в эксплуатации и обеспечивает достижение хорошего эффекта.
Основные преимущества:
(1) Система может контролировать характер движения стального проволочного троса в режиме реального времени, а также осуществлять визуальный, автоматический и интеллектуальный контроль характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос;
(2) Система использует технологию машинного зрения для контроля характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, в горизонтальном направлении и вертикальном направлении и осуществляет бесконтактный, высокоточный и недорогой способ сбора сигналов;
(3) Устройство измерения осевой скорости стального проволочного троса контролирует скорость перемещения подъемного стального проволочного троса в режиме реального времени, отражает скорость перемещения подъемного контейнера и осуществляет контроль состояния подъемного контейнера;
(4) Система передает сигналы от камер для технической съемки и датчика углового положения вала посредством проводной и беспроводной связи одному и тому же промышленному ПК для осуществления всестороннего контроля характера движения стального проволочного троса и, таким образом, осуществляет определение цилиндричности ролика, контроль спутанного состояния стального проволочного троса и контроль скорости подъемного контейнера в режиме реального времени.
Краткое описание чертежей
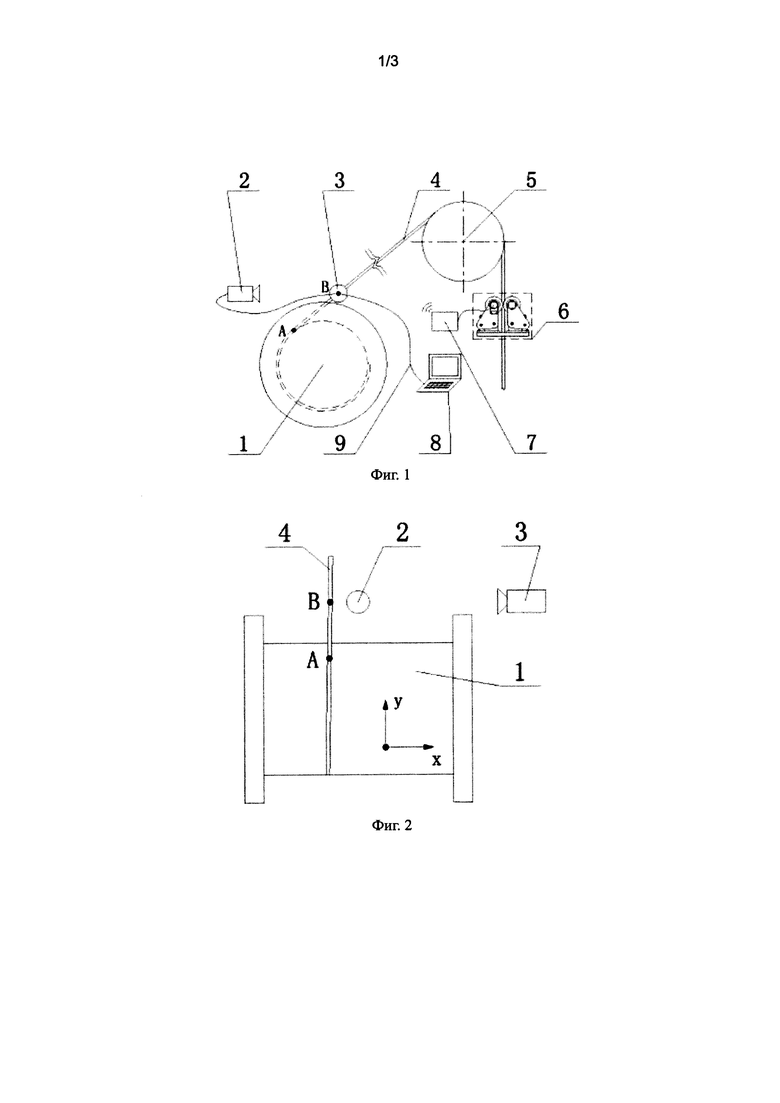
Фиг.1 изображает схему расположения всей системы в соответствии с настоящим изобретением;
Фиг. 2 изображает схему расположения камер для технической съемки для определения характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, в соответствии с настоящим изобретением;
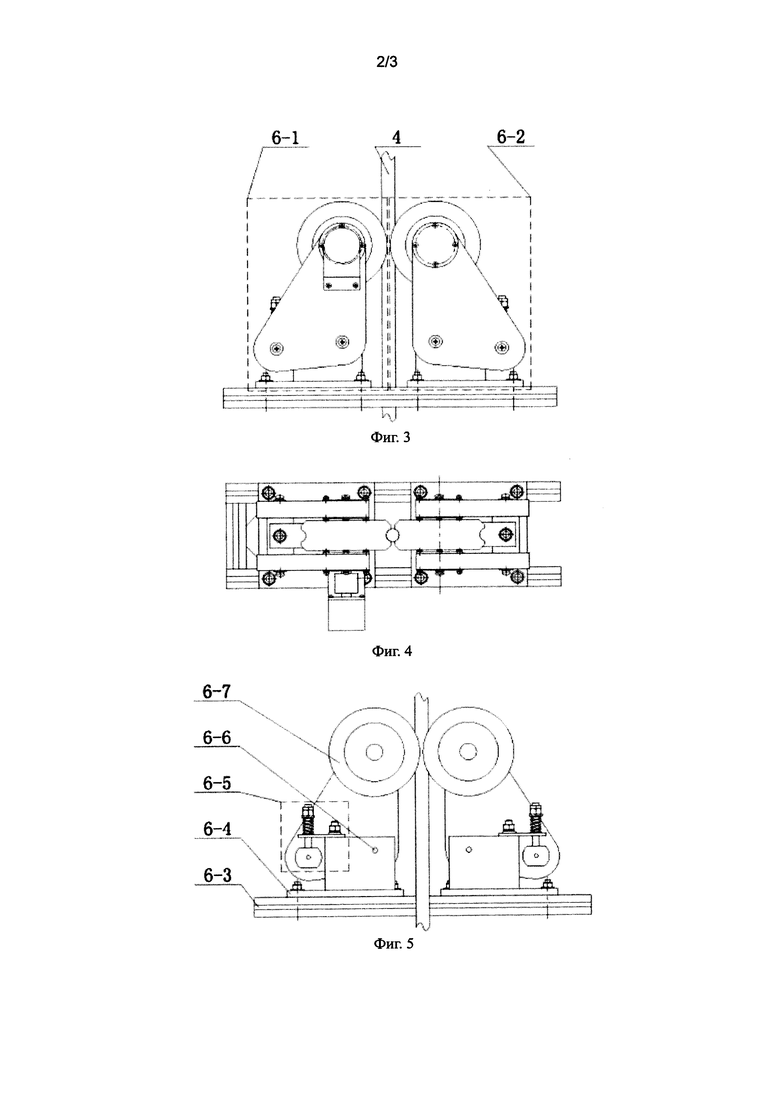
Фиг. 3 изображает вид спереди устройства измерения осевой скорости стального проволочного троса в соответствии с настоящим изобретением;
Фиг. 4 изображает вид сверху устройства измерения осевой скорости стального проволочного троса в соответствии с настоящим изобретением;
Фиг. 5 изображает вид спереди устройства измерения осевой скорости стального проволочного троса в соответствии с настоящим изобретением со снятым поддерживающим кронштейном с наружной стороны;
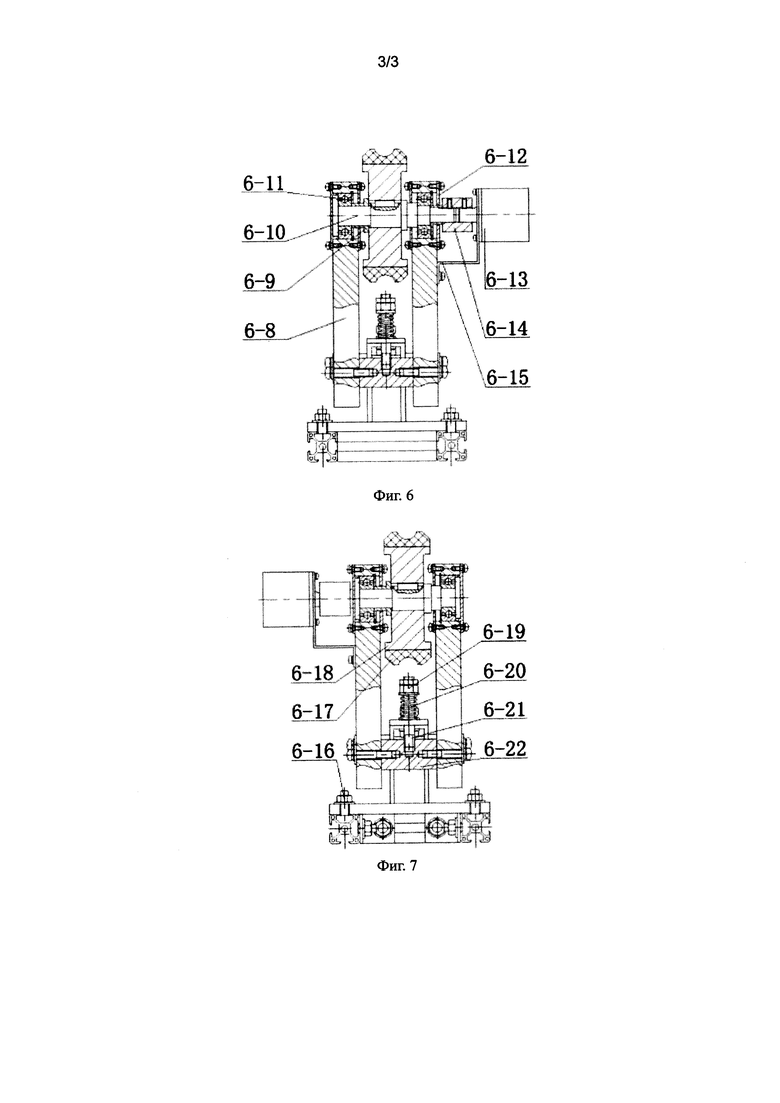
Фиг. 6 изображает вид слева устройства измерения осевой скорости стального проволочного троса с узлом измерения скорости в разрезе в соответствии с настоящим изобретением;
Фиг. 7 изображает вид справа устройства измерения осевой скорости стального проволочного троса с прижимным узлом в разрезе в соответствии с настоящим изобретением.
На чертежах:
1 - ролик;
2 - камера I для технической съемки;
3 - камера II для технической съемки;
4 - стальной проволочный трос;
5 - подъемный шкив;
6 - устройство измерения скорости стального проволочного троса;
7 - блок сбора данных;
8 - промышленный ПК;
9 - кабель связи;
6-1 - узел измерения скорости;
6-2 - прижимной узел;
6-3 - U-образное основание;
6-4 - основание;
6-5 - регулирующий узел;
6-6 - палец;
6-7 - фрикционное колесо;
6-8 - поддерживающий кронштейн;
6-9 - втулка вала;
6-10 - опорный стержень;
6-11 - подшипник;
6-12 - торцевая крышка подшипника;
6-13 - датчик углового положения вала;
6-14 - муфта;
6-15 - опора датчика углового положения вала;
6-16 - Т-образное болтовое соединение;
6-17 - износостойкая резиновая оболочка;
6-18 - спица;
6-19 - регулировочная гайка;
6-20 - пружина сжатия;
6-21 - шпилька;
6-22 - регулировочный блок
Осуществление изобретения
Далее более подробно описаны варианты осуществления настоящего изобретения со ссылками на сопроводительные чертежи.
Как показано на фиг. 1-2, система распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, содержит камеру I 2 для технической съемки, установленную с задней стороны ролика 1 перпендикулярно его оси, и камеру II 3 для технической съемки, установленную с правой стороны ролика 1 параллельно его оси. Из-за конструкции ролика камера II 3 для технической съемки не может получить изображение состояния всего вертикального перемещения стального проволочного троса 4 в идеальной точке А измерения стального проволочного троса 4, в которой стальной проволочный трос 4 расположен по касательной к ролику 1. Вследствие того, что расстояние между идеальной точкой А измерения стального проволочного троса и фактической точкой В измерения стального проволочного троса, где трос появляется из-за обода ролика 1 над точкой А, очень мало по сравнению с расстоянием между роликом 1 и подъемным шкивом, характер движения стального проволочного троса в фактической точке В измерения по существу аналогичен характеру движения стального проволочного троса в идеальной точке А измерения; следовательно, точка В измерения, расположенная возле точки А схода троса, выбрана в качестве контрольной точки для осуществления контроля состояния троса на сходе с ролика. Камера I для технической съемки 2 и камера II для технической съемки 3 соединены посредством кабеля 9 связи соответственно с промышленным ПК 8, устройство 6 измерения осевой скорости стального проволочного троса установлено на стальном проволочном тросе 4, который намотан на ролик, переброшен через подъемный шкив и проходит вертикально вниз, и блок 7 сбора данных соединен с датчиком 6-13 углового положения вала устройства 6 измерения осевой скорости стального проволочного троса.
Как показано на фиг. 3-7, устройство 6 измерения осевой скорости стального проволочного троса содержит U-образное основание 6-3, установленное на стальной проволочный трос 4, причем слева и справа от стального проволочного троса 4 на U-образном основании 6-3 симметрично расположены узел 6-1 измерения скорости и прижимной узел 6-2, которые содержат основание 6-4, расположенное на U-образном основании 6-3 соответственно, причем с передней и задней сторон основания 6-4 симметрично расположены поддерживающие кронштейны 6-8, между которыми посредством пальца 6-6 в нижней части расположен регулирующий узел 6-5, в верхней части поддерживающих кронштейнов 6-8 при помощи опорного стержня 6-10 расположены фрикционные колеса 6-7, обхватывающие стальной проволочный трос 4, причем с двух сторон опорного стержня 6-10 симметрично расположены подшипник 6-11 и втулка 6-9 вала, установленные на поддерживающих кронштейнах 6-8; узел 6-1 измерения скорости дополнительно содержит датчик 6-13 углового положения вала, соединенный с опорным стержнем 6-10 посредством муфты 6-14.
Регулирующий узел 6-5 содержит регулировочные блоки 6-22, расположенные между двумя поддерживающими кронштейнами 6-8, причем между регулировочными блоками 6-22 расположена регулировочная шпилька 6-21, через которую проходят пружина 6-20 сжатия и регулировочная гайка 6-19. Усилие предварительной затяжки пружины 6-20 сжатия может быть изменено посредством регулирования регулировочной гайки 6-19 с целью перемещения шпильки 6-21 вверх или вниз таким образом, что шпилька 6-21 приводит в движение регулировочные блоки 6-22, которые приводят поддерживающие кронштейны 6-8 во вращение вокруг пальца 6-6, и таким образом может быть отрегулирована сила прижатия узла 6-1 измерения скорости и прижимного узла 6-2 к стальному проволочному тросу 4 во избежание проскальзывания или застревания стального проволочного троса 4 между фрикционными колесами 6-7 узла 6-1 измерения скорости и для обеспечения синхронного движения фрикционных колес 6-7 и стального проволочного троса 4 с целью получения более точного результата определения характера движения;
на датчике 6-13 углового положения вала обеспечена опора 6-15 датчика углового положения, прикрепленная к одной стороне поддерживающих кронштейнов 6-8;
основание 6-4, расположенное на U-образном основании 6-3, жестко соединено посредством Т-образного болтового соединения 6-16 после помещения основания 6-4 в требуемое положение;
с двух сторон верхней части поддерживающего кронштейна 6-8 расположены торцевые крышки 6-12 подшипников во избежание попадания пыли и инородных частиц в подшипники 6-11;
на каждом фрикционном колесе 6-7 обеспечена износостойкая резиновая оболочка 6-17 для увеличения силы трения между фрикционным колесом 6-7 и стальным проволочным тросом 4 во избежание проскальзывания между ними с тем, чтобы обеспечить получение более точного результата определения характера движения.
Способ распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, при помощи вышеописанной системы включает следующие этапы:
(1) определение характера движения наматывания или разматывания стального проволочного троса в горизонтальном направлении и вертикальном направлении на ролике:
a. измерение фактической ширины D1 ролика 1 и ширины d1 изображения ролика 1 на изображении, полученном при помощи камеры I для технической съемки 2 соответственно, и расчет коэффициента Z1=D1/d1 преобразования камеры I для технической съемки 2;
измерение фактической ширины D2 стального проволочного троса 4 и ширины d2 изображения стального проволочного троса 4 на изображении, полученном при помощи камеры II для технической съемки 3 соответственно, и расчет коэффициента Z2=D2/d2 преобразования камеры II для технической съемки 3;
b. непрерывное получение изображений движения стального проволочного троса 4 в горизонтальном и вертикальном направлениях, в точке В измерения, в которой стальной проволочный трос 4 появляется из-за обода ролика 1 над точкой А выхода касательной линии стального проволочного троса 4 на ролике 1, при помощи камеры I для технической съемки 2 и камеры II для технической съемки 3;
c. обработка при помощи промышленного ПК 8 изображений, полученных посредством камеры I для технической съемки 2 и камеры II для технической съемки 3 соответственно, и получение скорости перемещения стального проволочного троса 4 в горизонтальном направлении и скорости перемещения стального проволочного троса 4 в направлении, перпендикулярном направлению стального проволочного троса, когда трос 4 сходит с ролика 1; причем способ получения скорости перемещения стального проволочного троса в горизонтальном направлении и в вертикальном направлении осуществляют следующим образом:
Изображения стального проволочного троса 4 на сходе предварительно обрабатывают посредством затенения и пороговой обработки для отделения стального проволочного троса 4 от фона. Изображения стального проволочного троса 4 маркируют цветом 1 (например, черным), а фоновые изображения маркируют цветом 2 (например, белым). На изображениях стального проволочного троса 4 на сходе, обработанных посредством пороговой обработки, горизонтальную линию, перпендикулярную стальному проволочному тросу 4, выбирают в положении В над роликом 1 в качестве реперной линии, а средние значения горизонтальной координаты и вертикальной координаты, которые представляют все пиксели стального проволочного троса 4 на реперной линии, принимают в качестве координаты (х, у) перемещающегося стального проволочного троса 4 в горизонтальном направлении и вертикальном направлении. Относительные скорости перемещения стального проволочного троса 4 в горизонтальном направлении и вертикальном направлении получают посредством взятия производной координат стального проволочного троса 4, получаемых непрерывно, по времени t, т.е. vx=dx/dt, vy=dy/dt. Затем получают фактические скорости перемещения стального проволочного троса 4 в горизонтальном направлении и вертикальном направлении посредством вычисления с учетом параметров и коэффициентов преобразования, т.е. Vx=vx⋅Z1, Vy=Vy⋅Z2.
(2) определение осевой скорости стального проволочного троса:
a. прекращение работы подъемной системы,
установка устройства 6 измерения осевой скорости стального проволочного троса,
установка U-образного основания 6-3 с правой нижней стороны подъемного шкива 5 таким образом, чтобы стальной проволочный трос 4 проходил через U-образное основание 6-3;
установка узла 6-1 измерения скорости и прижимного узла 6-2 с двух сторон стального проволочного троса 4 таким образом, чтобы износостойкие резиновые оболочки 6-17 двух фрикционных колес упирались в стальной проволочный трос 4,
закрепление Т-образного болтового соединения 6-16 для прикрепления узла 6-1 измерения скорости и прижимного узла 6-2 к U-образному основанию 6-3 и
регулирование регулировочной гайки 6-19 регулирующего узла 6-5 таким образом, чтобы достичь заданного значения прижимной силы между двумя фрикционными колесами 6-7 и стальным проволочных тросом 4;
b. начало работы подъемной системы так, что
перемещающийся стальной проволочный трос 4 приводит во вращение фрикционные колеса 6-7,
фрикционные колеса 6-7 посредством шпонки на лыске приводят в действие опорный стержень 6-10,
опорный стержень 6-10 посредством муфты 6-14 приводит в действие датчик 6-13 углового положения вала,
датчик 6-13 углового положения вала передает сигналы движения блоку 7 сбора данных, который передает эти сигналы через свой модуль беспроводной связи промышленному ПК 8, а
промышленный ПК 8 получает сигналы и вычисляет осевую скорость стального проволочного троса 4 в режиме реального времени при помощи программного обеспечения верхнего вычислительного устройства.
Несмотря на то, что настоящее изобретение изображено и описано со ссылкой на несколько вариантов осуществления, оно не ограничено этими конкретными вариантами. Любой эквивалентный вариант конструкции или способа, полученный на основе настоящего изобретения, равно как и любое прямое или косвенное применение в других соответствующих технических областях считаются входящими в объем охраны настоящего изобретения.
Группа изобретений относится к системе и способу распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос. Система содержит камеру I для технической съемки, установленную с задней стороны ролика перпендикулярно его оси, и камеру II для технической съемки, установленную с правой стороны ролика параллельно его оси. Камеры для технической съемки соединены кабелем связи с промышленным ПК. Система содержит устройство измерения осевой скорости стального проволочного троса. Трос намотан на ролик, переброшен через подъемный шкив и проходит вертикально вниз. Устройство измерения скорости троса соединено посредством проводов с блоком сбора данных. Устройство измерения скорости троса содержит U-образное основание. Слева и справа от троса симметрично расположены узел измерения скорости и прижимной узел. В верхней части поддерживающих кронштейнов расположены фрикционные колеса, обхватывающие трос. Узел измерения скорости содержит датчик углового положения вала. Достигается распознавание характера движения крутильного ролика. 2 н. и 5 з.п. ф-лы, 7 ил.
1. Система распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, содержащая камеру I (2) для технической съемки, установленную с задней стороны ролика (1) перпендикулярно его оси, и камеру II (3) для технической съемки, установленную с правой стороны ролика (1) параллельно его оси, причем
камера I (2) для технической съемки и камера II (3) для технической съемки соответственно соединены кабелем (9) связи с промышленным ПК (8),
устройство (6) измерения осевой скорости стального проволочного троса установлено на стальном проволочном тросе (4), который намотан на ролик (1), переброшен через подъемный шкив (5) и проходит вертикально вниз, при этом
устройство (6) измерения осевой скорости стального проволочного троса соединено посредством проводов с блоком (7) сбора данных; и
устройство (6) измерения осевой скорости стального проволочного троса содержит U-образное основание (6-3), установленное на стальной проволочный трос (4), причем
слева и справа от стального проволочного троса (4) на U-образном основании (6-3) симметрично расположены узел (6-1) измерения скорости и прижимной узел (6-2), которые содержат основание (6-4), расположенное на U-образном основании (6-3) соответственно,
с передней и задней сторон основания (6-4) симметрично расположены поддерживающие кронштейны (6-8), между которыми посредством пальца (6-6) в нижней части расположен регулирующий узел (6-5),
в верхней части поддерживающих кронштейнов (6-8) при помощи опорного стержня (6-10) расположены фрикционные колеса (6-7), обхватывающие стальной проволочный трос (4),
причем
с двух сторон опорного стержня (6-10) симметрично расположены подшипник (6-11) и втулка (6-9) вала, установленные на поддерживающих кронштейнах (6-8); а
узел (6-1) измерения скорости дополнительно содержит датчик (6-13) углового положения вала, соединенный с опорным стержнем (6-10) посредством муфты (6-14).
2. Система распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, по п. 1, в которой на датчике (6-13) углового положения вала выполнена опора (6-15) датчика, прикрепленная к одной стороне поддерживающих кронштейнов (6-8).
3. Система распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, по п. 1, в которой основание (6-4), расположенное на U-образном основании (6-3), жестко соединено посредством Т-образного болтового соединения (6-16).
4. Система распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, по п. 1, в которой в верхней части поддерживающих кронштейнов (6-8) с двух сторон выполнены торцевые крышки (6-12) подшипников.
5. Система распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, по п. 1, в которой на фрикционном колесе (6-7) обеспечена износостойкая резиновая оболочка (6-17).
6. Способ распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, при помощи системы по п. 1, включающий следующие этапы:
(1) определение характера движения наматывания или разматывания стального проволочного троса в горизонтальном направлении и вертикальном направлении на ролике:
a) измерение фактической ширины D1 ролика (1) и ширины d1 изображения ролика (1) на изображении, полученном при помощи камеры I (2) для технической съемки, установленной с задней стороны ролика (1), соответственно, и расчет коэффициента Z1=D1/d1 преобразования камеры I (2) для технической съемки;
измерение фактической ширины D2 стального проволочного троса (4) и ширины d2 изображения стального проволочного троса (4) на изображении, полученном при помощи камеры II (3) для технической съемки, установленной с правой стороны ролика (1), соответственно, и расчет коэффициента Z2=D2/d2 преобразования камеры II (3) для технической съемки;
b) непрерывное получение изображений движения стального проволочного троса (4) в двух направлениях, в точке В измерения, где стальной проволочный трос появляется из-за обода ролика над точкой А выхода касательной линии стального проволочного троса (4) на ролике (1), при помощи камеры I (2) для технической съемки, расположенной перпендикулярно оси ролика (1), и камеры II (3) для технической съемки, расположенной параллельно оси ролика (1);
c) обработка при помощи промышленного ПК (8) изображений, полученных посредством камеры I (2) для технической съемки и камеры II (3) для технической съемки соответственно, и получение скорости перемещения стального проволочного троса (4) в горизонтальном направлении, когда трос сходит с ролика (1), а также скоростей перемещения стального проволочного троса в горизонтальном направлении и в вертикальном направлении, когда трос (4) сходит с ролика (1) в направлении, перпендикулярном направлению стального проволочного троса (4);
(2) определение осевой скорости стального проволочного троса:
a) прекращение работы подъемной системы,
установка устройства (6) измерения осевой скорости стального проволочного троса,
установка U-образного основания (6-3) на стальной проволочный трос (4) ниже подъемного шкива (5) таким образом, чтобы стальной проволочный трос (4) проходил через U-образное основание (6-3);
установка узла (6-1) измерения скорости и прижимного узла (6-2) симметрично с двух сторон стального проволочного троса (4) таким образом, чтобы два фрикционных колеса (6-7) упирались в стальной проволочный трос (4),
закрепление узла (6-1) измерения скорости и прижимного узла (6-2) к U-образному основанию (6-3) и
регулирование регулирующего узла (6-5) таким образом, чтобы достичь заданного значения прижимной силы между двумя фрикционными колесами (6-7) и стальным проволочным тросом (4);
b) начало работы подъемной системы так, что
перемещающийся стальной проволочный трос (4) приводит во вращение фрикционные колеса (6-7),
фрикционные колеса (6-7) посредством шпонки на лыске приводят в действие опорный стержень (6-10),
опорный стержень (6-10) посредством муфты (6-14) приводит в действие датчик (6-13) углового положения вала,
датчик (6-13) углового положения вала передает сигналы движения блоку (7) сбора данных, который передает эти сигналы через свой модуль беспроводной связи промышленному ПК (8), а
промышленный ПК (8) получает сигналы и вычисляет осевую скорость стального проволочного троса (4) в режиме реального времени при помощи программного обеспечения верхнего вычислительного устройства.
7. Способ распознавания характера движения крутильного ролика, наматывающего или разматывающего стальной проволочный трос, по п. 6, в котором
для получения скорости перемещения стального проволочного троса (4) в горизонтальном направлении и в вертикальном направлении при сходе троса (4) с ролика изображения схода стального проволочного троса (4) предварительно обрабатывают посредством затенения и пороговой обработки, а полученные изображения стального проволочного троса и фоновые изображения маркируют разными цветами для отделения их друг от друга;
на изображениях схода стального проволочного троса (4), обработанных посредством пороговой обработки, горизонтальную линию, перпендикулярную стальному проволочному тросу (4), выбирают в положении В над роликом (1) в качестве реперной линии, а средние значения горизонтальной координаты и вертикальной координаты, которые представляют все пиксели стального проволочного троса (4) на реперной линии, принимают в качестве координаты (х, у) перемещающегося стального проволочного троса (4) в горизонтальном направлении и вертикальном направлении;
относительные скорости перемещения стального проволочного троса (4) в горизонтальном направлении и вертикальном направлении получают посредством взятия производной координат стального проволочного троса (4), получаемых непрерывно, по времени t, т.е. vx=dx/dt, vy=dy/dt;
затем получают фактические скорости перемещения стального проволочного троса (4) в горизонтальном направлении и вертикальном направлении посредством вычисления с учетом параметров и коэффициентов преобразования, т.е. Vx=vx⋅Z1, Vy=vy⋅Z2.
| CN 104459192 A, 25.03.2015 | |||
| CN 201359610 Y, 09.12.2009 | |||
| DE 102005050220 A1, 26.04.2007. |

