Область техники, к которой относится изобретение
Настоящее изобретение относится к приборам и методам контроля динамических напряжений в многослойном витом тросе и барабане в сверхглубокой скважине для расчета динамических контактных напряжений, образующихся в многослойном витом стальном тросе, намотанном не менее чем в два слоя, в области поверхности контакта с барабаном и его перегородкой в составе системы наматывающего барабана шахтной подъемной установки.
Существующий уровень техники
Шахтная подъемная установка предназначена для подъема добытых ископаемых, а также подъема и спуска рабочих, оборудования и необходимых средств по шахтному стволу. Это важное звено производственного процесса связывает наземный фронт работ с забоем. Подземные залежи каменного угля в Китае простираются на сотни километров и составляют 53% от всех разведанных запасов каменного угля в мире. Поэтому особое внимание привлекают к себе способы и оборудование для разработки сверхглубоких скважин. Подъемные работы в сверхглубокой скважине обычно выполняются с использованием многоканатных подъемных установок со шкивами трения и системы наматывающих барабанов. Тем не менее, согласно новым стандартам действующие сейчас в Китае многоканатные установки со шкивами трения не рекомендованы для применения в шахтных стволах глубиной свыше 1200 метров. В системе наматывающих барабанов применяется намотка в один слой, а грузоподъемность троса обеспечивается за счет увеличения диаметра и длины окружности барабана. Эффективность такого решения ограничена. Для того, чтобы действительно повысить грузоподъемность троса на несколько порядков, его следует наматывать в несколько слоев. Согласно Правилам техники безопасности для работы в угольных шахтах, принятым Правительством КНР, для подъема или спуска грузов по вертикальному шахтному стволу трос наматывают на барабан не менее чем в два слоя, а Требования к охране труда и технике безопасности на производстве, принятые правительством провинции Онтарио (Канада) гласят, что максимальное количество слоев намотки стального троса при использовании барабана со спиральной выемкой не должно превышать трех. Основные детали наматывающего барабана – ведущий вал, корпус барабана (барабан с гладкой поверхностью, барабан со спиральной выемкой, двойной барабан), стальной трос, подъемная клеть, головной шкив и тормоз. С одного конца трос крепится к барабану и наматывается на него, а другой конец проходит через головной шкив и удерживает подъемную клеть. Намотка или размотка троса и, следовательно, подъем/опускание клети осуществляется посредством вращения барабана по часовой стрелке или против часовой стрелки. По сравнению с барабанами других типов, двойной барабан позволяет не только сделать подъемный механизм более компактным, но и существенно продлить срок службы троса. Двойной барабан, таким образом, можно считать ключевым элементом подъемного механизма, на который приходится основная нагрузка и силовое напряжение, а его выход из строя имеет значительные экономические последствия и может привести к повреждению оборудования и травмам.
При выполнении подъемных работ в шахтном стволе стальной трос наматывают на барабан, в результате чего клеть с грузом поднимается. Ускорение, замедление и движение с постоянной скоростью, а также растяжение троса со временем приводит к тому, что подъемная установка внутри шахтного ствола постоянно подвергается горизонтальным и вертикальным вибрациям, а на трос действует динамическая нагрузка. В результате, между первым слоем намотки троса и поверхностью двойного барабана, а также между восходящими отрезками троса в разных слоях намотки и перегородкой барабана возникает динамическое контактное напряжение. При намотке троса на двойной барабан в несколько слоев радиальное давление, образующееся в процессе намотки первого слоя на поверхность двойного барабана, и осевое усилие от восходящих отрезков троса в разных слоях намотки, действующее на перегородку барабана, могут привести к образованию усталостных повреждений (деформации, трещинам и разломам корпуса барабана и перегородки), что значительно сокращает срок службы подъемной установки и может привести к авариям. Поэтому в настоящем документе предлагаются прибор и метод контроля динамических напряжений в многослойном витом тросе и барабане в сверхглубокой скважине для расчета динамических контактных напряжений, образующихся в многослойном витом стальном тросе, намотанном не менее чем в два слоя, в области поверхности контакта с барабаном и его перегородкой в составе системы наматывающего барабана шахтной подъемной установки. Также описание настоящего прибора и метода может представлять собой обширный массив теоретических данных, позволяющих лучше понять механизм отказа системы при усталостных повреждениях двойного барабана и спрогнозировать срок его службы.
Ниже приводится краткое описание экспериментальных приборов, относящихся к барабанам подъемных установок: В патенте № CN201310398365.X раскрывается прибор для моделирования гидравлической нагрузки для шахтных подъемных установок, согласно которому барабан основного подъемного механизма соединен с тросом, намотанным на соседний барабан механизма моделирования гидравлической нагрузки, через трос, намотанный на барабан исследуемого механизма, в результате чего на исследуемый механизм оказывается постоянная нагрузка и создается крутящий момент в соответствии с фактическими условиями работы. В патенте № CN201410528414.1 раскрывается стенд для испытания и метод испытаний подъемной системы для сверхглубоких скважин, который позволяет определить такие важные параметры, как растяжение троса, давление на барабан и местоположение подъемной клети. В патенте № CN201520661617.8 раскрывается прибор для нагрузочного испытания барабана, согласно которому приводная и нагрузочная части соединяются с группой приводных устройств для проведения нагрузочных испытаний различных типов барабанов. Однако устройства, раскрытые в указанных патентах, не позволяют определить динамическое контактное напряжение, действующее на барабан в результате контакта с несколькими слоями намотанного троса, и на перегородку барабана в результате динамической нагрузки от троса.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническая задача: Задача настоящего изобретения заключается в том, чтобы сгладить недостатки существующего уровня техники, для чего предлагаются прибор и метод контроля динамических напряжений в многослойном витом тросе и барабане в сверхглубокой скважине для расчета динамических контактных напряжений, образующихся в многослойном витом стальном тросе, намотанном не менее чем в два слоя, в области поверхности контакта с барабаном и его перегородкой в составе системы наматывающего барабана шахтной подъемной установки.
Техническая задача в рамках настоящего изобретения решается следующим образом: Прибор контроля динамического контактного напряжения между барабаном и несколькими слоями намотки троса включает в себя опорную систему, систему наматывания, систему контроля динамической нагрузки и систему контроля растяжения.
Опорная система состоит из нижней пластины и закрепленной на ней опоры барабанного серводвигателя.
Система наматывания состоит из электродвигателя, высокоскоростной муфты, редуктора, низкоскоростной муфты, первой опоры подшипника, первого фрикционного колеса, первого дискового тормоза, второго дискового тормоза, ведущего вала, двойного барабана, второго фрикционного колеса, третьего дискового тормоза, четвертого дискового тормоза, второй опоры подшипника и стального троса, при этом электродвигатель крепится к нижней пластине, его выходной вал - к входному концу редуктора с помощью высокоскоростной муфты, а выходной вал редуктора – к торцу ведущего вала с помощью низкоскоростной муфты; оба конца ведущего вала крепятся на подшипники в первой и второй опорах подшипника, соответственно, при этом первая опора подшипника и вторая опора подшипника закреплены на нижней пластине на специальное крепление. На ведущем валу имеются два диска с фланцем, которые крепятся к двойному барабану, с помощью соединительной муфты, при этом первое фрикционное колесо и второе фрикционное колесо располагаются по обеим сторонам двойного барабана, первый дисковый тормоз и второй дисковый тормоз крепятся к нижней пластине со стороны первого фрикционного колеса, а третий дисковый тормоз и четвертый дисковый тормоз – со стороны второго фрикционного колеса, при этом стальной трос намотан на выемку на двойном барабане не менее чем в два слоя.
Система контроля динамической нагрузки состоит из барабанного серводвигателя, S-образного тензодатчика, зажима троса и U-образного фиксатора троса, при этом барабанный серводвигатель закреплен на опоре серводвигателя, а его резьбовой шток соединен с одним концом S-образного тензодатчика, при этом другой конец S-образного тензодатчика соединен с зажимом троса, сквозь который проходит один конец троса, который фиксируется с помощью U-образного фиксатора.
Система контроля растяжения состоит из первой группы тензометров (23), второй группы тензометров (25), третьей группы тензометров (27), четвертой группы тензометров (29), тензометров со стороны перегородки, второго U-образного сквозного паза (24), четвертого U-образного сквозного паза (28), первого U-образного сквозного паза (22) и третьего U-образного сквозного паза (26), выходящих на прямолинейные отрезки выемки двойного барабана (16), U-образных сквозных пазов, выходящих на перегородку двойного барабана (16), при этом первая группа тензометров (23) крепится к внутренней стенке первого U-образного сквозного паза (22), вторая группа тензометров (25) - к внутренней стенке второго U-образного сквозного паза (24), третья группа тензометров (27) - к внутренней стенке третьего U-образного сквозного паза (26), четвертая группа тензометров (29) - к внутренней стенке четвертого U-образного сквозного паза (28), группа тензометров со стороны перегородки – к внутренним стенкам соответствующих U-образных сквозных пазов со стороны перегородки, при этом количество тензометров со стороны перегородки равно количеству слоев намотки троса (4), а каждый тензометр со стороны перегородки соответствует одному слою намотки троса.
Также первый U-образный сквозной паз, второй U-образный сквозной паз, третий U-образный сквозной паз и четвертый U-образный сквозной паз располагаются параллельно оси двойного барабана.
Метод контроля динамических напряжений в многослойном витом тросе и барабане в сверхглубокой скважине согласно вышеприведенному описанию прибора контроля включает в себя следующие этапы:
а) закрепление всех групп тензометров на внутренних стенках соответствующих U-образных сквозных пазов и всех тензометров со стороны перегородки на внутренних стенках соответствующих U-образных сквозных пазов со стороны перегородки;
б) выбор троса нужной длины, пропускание одного конца троса через зажим и крепление его U-образным фиксатором;
в) включение электродвигателя с помощью пульта дистанционного управления, намотка троса на двойной барабан, отключение электродвигателя, когда трос будет намотан на барабан в нужное количество слоев, включение дисковых тормозов, чтобы остановить движение двойного барабана с помощью фрикционных колес, управление горизонтальным движением барабанного сервопривода с компьютера так, чтобы приложить к тросу заданную усталостную нагрузку или напряжение отказа;
г) задание переменного значения амплитуды смещения барабанного сервопривода 9 с программы компьютерного управления для приложения к стальному тросу динамической переменной нагрузки; моделирование динамического напряжения между тросом и поверхностью двойного барабана и перегородки путем имитации процесса подъема троса в динамике; включение источника питания и запитывание электродвигателя, барабанного сервопривода, S-образного тензодатчика, первой группы тензометров, второй группы тензометров, третий группы тензометров, четвертой группы тензометров, тензометров со стороны перегородки в процессе моделирования динамического напряжения между тросом и поверхностью двойного барабана и перегородки путем имитации процесса подъема троса в динамике; регистрация изменения динамической нагрузки на стальной трос с помощью S-образного тензодатчика; регистрация динамического напряжения между тросом и поверхностью двойного барабана с помощью групп тензометров; регистрация динамического напряжения между различными слоями намотки троса на перегородку двойного барабана с помощью тензометров со стороны перегородки;
д) изменение количества слоев намотки троса и значения амплитуды смещения барабанного сервопривода для моделирования динамического контактного напряжения между тросом и поверхностью двойного барабана и его перегородки для различного количества слоев намотки при различной динамической нагрузке.
Полезный эффект: Настоящее изобретение позволяет осуществлять контроль в динамике контактного напряжения между первым слоем намотки троса и поверхностью двойного барабана и между различными слоями намотри троса и перегородкой барабана при использовании подъемного устройства в сверхглубокой скважине, где условия работы подразумевают постоянную меняющуюся динамическую нагрузку на трос и изменение количества слоев намотки троса на барабан. Предлагается эффективное устройство для проведения испытаний и исследования усталостных повреждений двойного барабана и троса подъемных устройств при работе в сверхглубоких скважинах при различных условиях. Изобретение может широко применяться для расчета срока службы двойного барабана и троса подъемных устройств при работе в сверхглубоких скважинах и сбора важных данных для разработки правил техники безопасности подъемных работ на сверхглубоких скважинах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
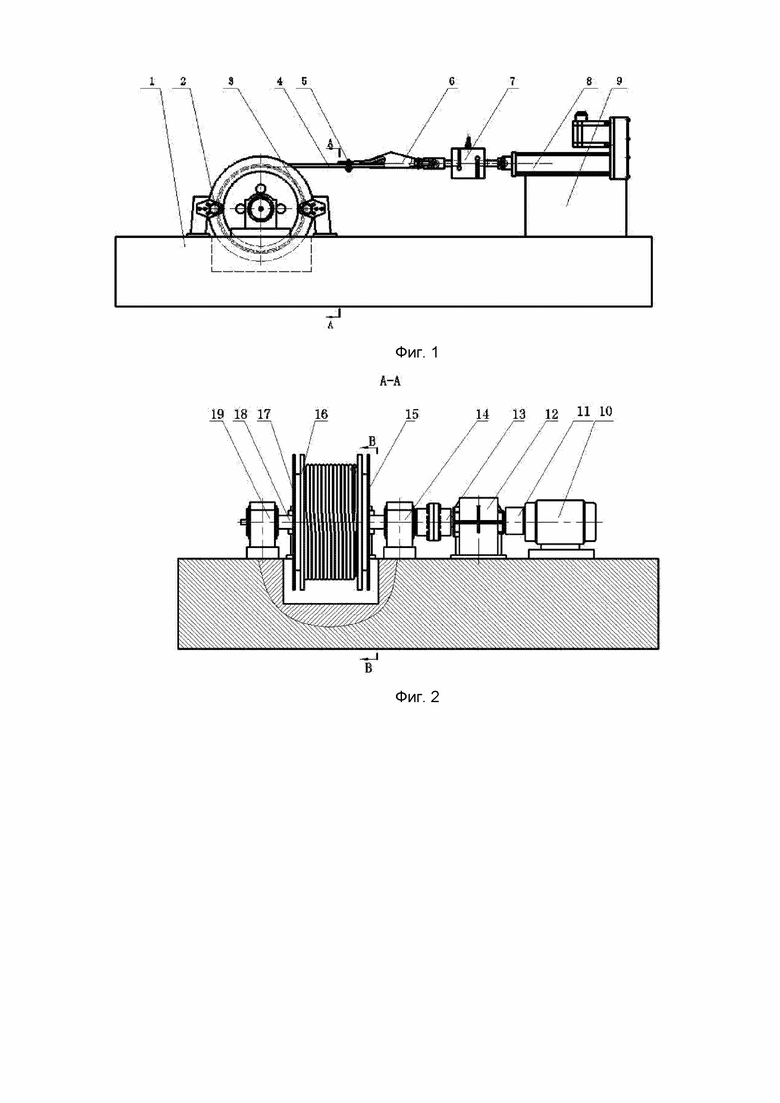
Фигура 1 представляет собой вид устройства спереди согласно изобретению;
Фигура 2 представляет собой вид Фигуры А в разрезе А-А;
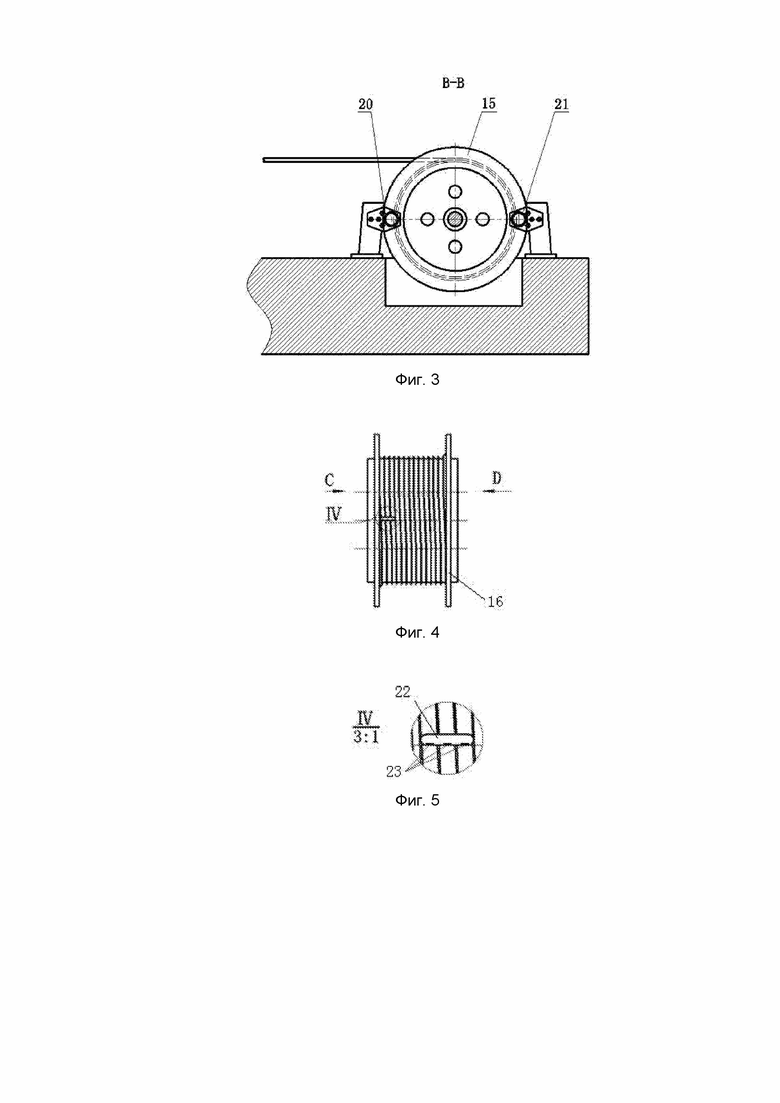
Фигура 3 представляет собой вид Фигуры А в разрезе B-B;
Фигура 4 представляет собой вид двойного барабана спереди;
Фигура 5 представляет собой частично увеличенную схему детали IV, отмеченной на Фигуре 4;
Фигура 6 представляет собой развернутый вид двойного барабана;
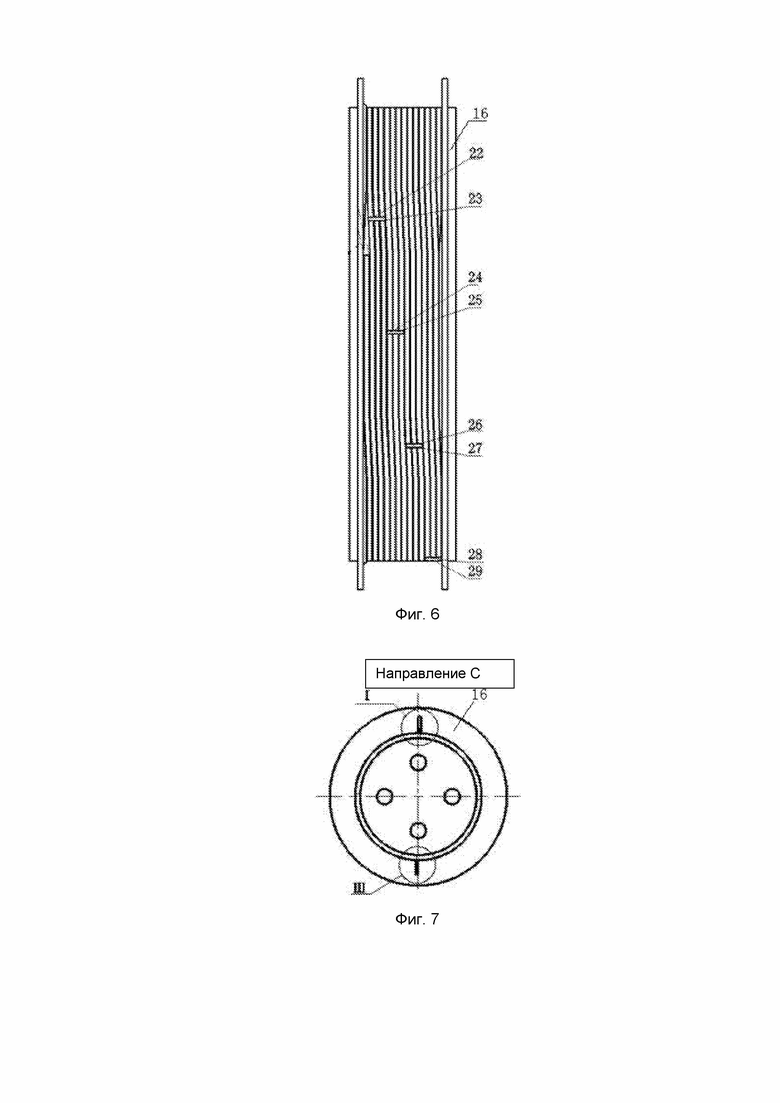
Фигура 7 представляет собой вид Фигуры 4 в направлении С, соответствующей «третьим» позициям;
Фигура 8 представляет собой частично увеличенную схему детали I, отмеченной на Фигуре 7;
Фигура 9 представляет собой частично увеличенную схему детали III, отмеченной на Фигуре 7;
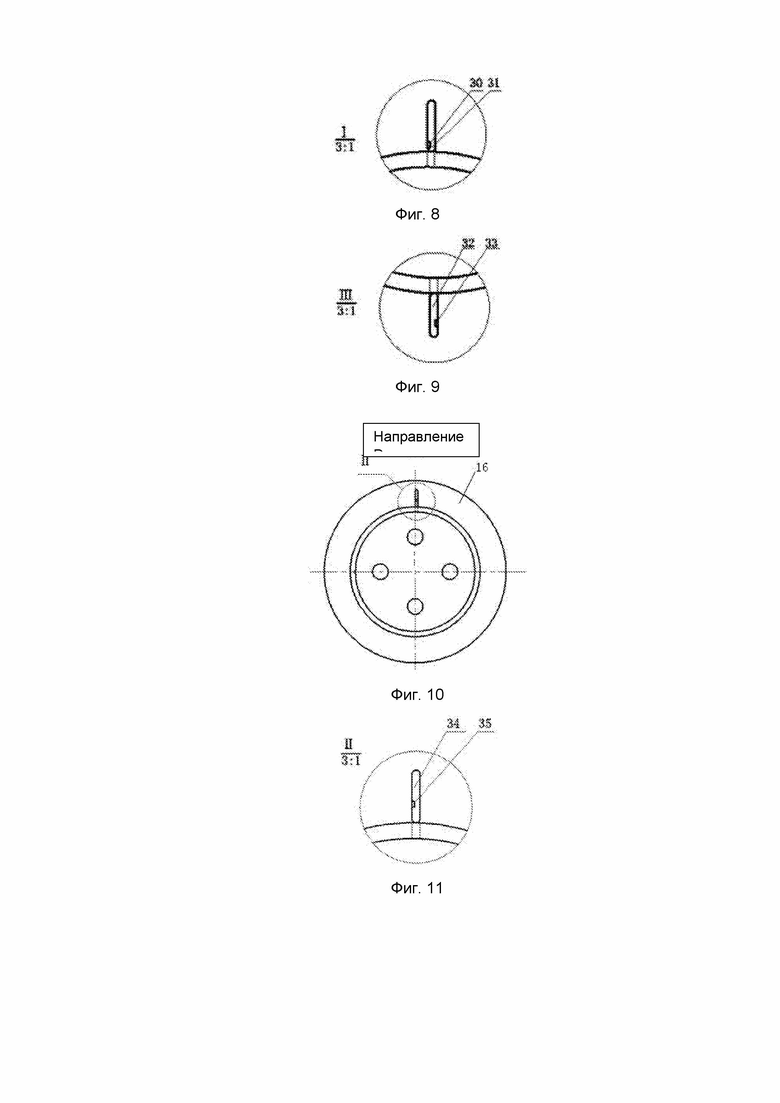
Фигура 10 представляет собой вид Фигуры 4 в направлении D, соответствующей «четвертым» позициям;
Фигура 11 представляет собой частично увеличенную схему детали II, отмеченной на Фигуре 10.
На чертежах:
1. нижняя пластина;
2. четвертый дисковый тормоз;
3. третий дисковый тормоз;
4. стальной трос;
5. U-образный фиксатор троса;
6. зажим троса;
7. S-образный тензодатчик;
8. барабанный сервопривод;
9. опора барабанного сервопривода;
10. электродвигатель;
11. высокоскоростная муфта;
12. редуктор;
13. низкоскоростная муфта;
14. первая опора подшипника;
15. первое фрикционное колесо;
16. двойной барабан;
17. второе фрикционное колесо;
18. ведущий вал;
19. вторая опора подшипника;
20. первый дисковый тормоз;
21. второй дисковый тормоз;
22. первый U-образный сквозной паз;
23. первая группа тензометров;
24. второй U-образный сквозной паз;
25 вторая группа тензометров;
26. третий U-образный сквозной паз;
27. третья группа тензометров;
28. четвертый U-образный сквозной паз;
29. четвертая группа тензометров;
30. пятый U-образный сквозной паз;
31. пятый тензометр;
32. шестой U-образный сквозной паз;
33. шестой тензометр;
34. седьмой U-образный сквозной паз;
35. седьмой тензометр.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Ниже приводится подробное описание изобретения со ссылкой на чертежи.
Как показано на Фигурах 1-11, прибор контроля динамического контактного напряжения между барабаном и несколькими слоями намотки троса включает в себя опорную систему, систему наматывания, систему контроля динамической нагрузки и систему контроля растяжения.
Опорная система состоит из нижней пластины 1 и закрепленной на ней опоры барабанного серводвигателя 9.
Система наматывания состоит из электродвигателя 10, высокоскоростной муфты 11, редуктора 12, низкоскоростной муфты 13, первой опоры подшипника 14, первого фрикционного колеса 15, первого дискового тормоза 20, второго дискового тормоза 21, ведущего вала 18, двойного барабана 16, второго фрикционного колеса 17, третьего дискового тормоза 3, четвертого дискового тормоза 2, второй опоры подшипника 19 и стального троса 4, при этом электродвигатель 10 крепится к нижней пластине 1, его выходной вал - к входному концу редуктора 12 с помощью высокоскоростной муфты 11, а выходной вал редуктора 12 – к торцу ведущего вала 18 с помощью низкоскоростной муфты 13; оба конца ведущего вала 18 крепятся на подшипники в первых и вторых опорах подшипника 14 и 19, соответственно, при этом первая опора подшипника 14 и вторая опора подшипника 19 закреплены на нижней пластине 1 на крепление. На ведущем валу 18 имеются два диска с фланцем, которые крепятся к двойному барабану 16 с помощью соединительной муфты, при этом первое фрикционное колесо 15 и второе фрикционное колесо 17 располагаются по обеим сторонам двойного барабана 16 и закреплены на высокопрочные болты, первый дисковый тормоз 20 и второй дисковый тормоз 21 крепятся к нижней пластине со стороны первого фрикционного колеса 15, а третий дисковый тормоз 3 и четвертый дисковый тормоз 2 – со стороны второго фрикционного колеса 17, при этом стальной трос 4 намотан на выемку на двойном барабане 16 не менее чем в два слоя.
Система контроля динамической нагрузки состоит из барабанного серводвигателя 8, S-образного тензодатчика 7, зажима троса 6 и U-образного фиксатора троса 5, при этом барабанный серводвигатель 8 закреплен на опоре серводвигателя 9, а его резьбовой шток соединен с одним концом S-образного тензодатчика 7, при этом другой конец S-образного тензодатчика 7 соединен с зажимом троса 6, сквозь который проходит один конец троса 4, который фиксируется с помощью U-образного фиксатора 5.
Система контроля растяжения состоит из первой группы тензометров (23), второй группы тензометров (25), третьей группы тензометров (27), четвертой группы тензометров (29), тензометров со стороны перегородки, второго U-образного сквозного паз (24), четвертого U-образного сквозного паза (28), первого U-образного сквозного паза (22) и третьего U-образного сквозного паза С (26), выходящих на прямолинейные отрезки выемки двойного барабана (16), U-образных сквозных пазов, выходящих на перегородку двойного барабана (16), при этом первая группа тензометров (23) крепится к внутренней стенке первого U-образного сквозного паза (22), вторая группа тензометров (25) - к внутренней стенке второго U-образного сквозного паза (24), третья группа тензометров (27) - к внутренней стенке третьего U-образного сквозного паза (26), четвертая группа тензометров (29) - к внутренней стенке четвертого U-образного сквозного паза (28), группа тензометров со стороны перегородки – к внутренним стенкам соответствующих U-образных сквозных пазов со стороны перегородки, при этом количество тензометров со стороны перегородки равно количеству слоев намотки троса (4), а каждый тензометр со стороны перегородки соответствует одному слою намотки.
В настоящем варианте осуществления стальной трос 4 намотан в три слоя. Предусмотрено три U-образных сквозных паза со стороны перегородки: пятый U-образный сквозной паз 30, шестой U-образный сквозной паз 32 и седьмой U-образный сквозной паз 34. Осуществление включает в себя три тензометра со стороны перегородки: пятый тензометр 31, который крепится к внутренней стенке пятого U-образного сквозного паза 30, шестой тензометр 33, который крепится к внутренней стенке шестого U-образного сквозного паза 32, седьмой тензометр 35, который крепится к внутренней стенке седьмого U-образного сквозного паза 34. Пятый тензометр 31 соответствует первому слою намотки, шестой тензометр 33 – второму слою намотки, а седьмой тензометр 35 – третьему слою намотки.
Метод контроля динамических напряжений в многослойном витом тросе и барабане в сверхглубокой скважине согласно вышеприведенному описанию прибора контроля включает в себя следующие этапы:
а) закрепление всех групп тензометров на внутренних стенках соответствующих U-образных сквозных пазов и всех тензометров со стороны перегородки на внутренних стенках соответствующих U-образных сквозных пазов со стороны перегородки;
б) выбор троса 4 нужной длины, пропускание одного конца троса 4 через зажим 6 и крепление его U-образным фиксатором 5;
в) включение электродвигателя 10 с помощью пульта дистанционного управления, намотка троса 4 на двойной барабан 16, отключение электродвигателя 10, когда трос 4 будет намотан на барабан 16 в нужное количество слоев, включение дисковых тормозов, чтобы остановить движение двойного барабана 16 с помощью фрикционных колес, управление горизонтальным движением барабанного сервопривода 9 с компьютера так, чтобы приложить к тросу 4 заданную усталостную нагрузку или напряжение отказа;
г) задание переменного значения амплитуды смещения барабанного сервопривода 9 с программы компьютерного управления для приложения к стальному тросу 4 динамической переменной нагрузки; моделирование динамического напряжения между тросом 4 и поверхностью двойного барабана 16 и перегородки путем имитации процесса подъема троса 4 в динамике; включение источника питания и запитывание электродвигателя 10, барабанного сервопривода 9, S-образного тензодатчика 8, первой группы тензометров 23, второй группы тензометров 25, третьей группы тензометров 27, четвертой группы тензометров 29, пятого тензометра 31, шестого тензометра 33, и седьмого тензометра 35; регистрация динамического напряжения между тросом 4 и поверхностью двойного барабана 16 с помощью групп тензометров; регистрация динамического напряжения между различными слоями намотки троса 4 на перегородку двойного барабана 16 с помощью тензометров со стороны перегородки;
д) изменение количества слоев намотки троса 4 и значения амплитуды смещения барабанного сервопривода 9 для моделирования динамического контактного напряжения между тросом 4 и поверхностью двойного барабана 16 и его перегородки для различного количества слоев намотки при различной динамической нагрузке.
Выше описывается только несколько предпочтительных вариантов осуществления настоящего изобретения. Необходимо отметить, что специалисты в данном уровне техники могут вносить в конструкцию изобретения изменения и усовершенствования, при этом принцип настоящего изобретения останется прежним. На все изменения и усовершенствования подобного рода распространяются права по настоящему патенту.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| УСТРОЙСТВО АМОРТИЗАЦИОННОГО БУФЕРА ШАХТНОЙ КЛЕТИ КРУПНОТОННАЖНОЙ ПОДЪЕМНОЙ СИСТЕМЫ СВЕРХГЛУБОКОЙ ШАХТЫ | 2018 |
|
RU2733024C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПЕРЕХОДА ОТ СЛОЯ К СЛОЮ ПОДЪЕМНОГО СТАЛЬНОГО ТРОСА | 2017 |
|
RU2685742C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Способ управления пространственным расположением подъемного контейнера в подъемной системе двойного типа намотки канатов для работы в сверхглубокой вертикальной шахте | 2019 |
|
RU2742676C1 |
| СПОСОБ РАБОТЫ ГРУЗОВОЙ ТЯГОВОЙ ЛЕБЕДКИ И ГРУЗОВАЯ ТЯГОВАЯ ЛЕБЕДКА | 2016 |
|
RU2630266C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИИ ПЛАВУЧИХ ПЛАТФОРМ | 1993 |
|
RU2061620C1 |
| ПОДЪЕМНЫЙ КРАН И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2017 |
|
RU2743304C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ИНСПЕКЦИОННАЯ РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА НА НАПРАВЛЯЮЩЕЙ, ПРЕДНАЗНАЧЕННАЯ ДЛЯ РАБОТЫ В ПОМЕЩЕНИИ | 2015 |
|
RU2670548C1 |
Прибор контроля динамических напряжений в многослойном витом тросе и барабане в сверхглубокой скважине включает в себя опорную систему, систему наматывания, систему контроля динамической нагрузки и систему контроля растяжения. Система наматывания состоит из электродвигателя, который соединен с ведущим валом с помощью редуктора. К ведущему валу примыкает диск с фланцем, который крепится с помощью двойного барабана, закрепленного на ведущем валу на муфту. По обеим сторонам двойного барабана закреплены фрикционные колеса, к которым с одной стороны крепятся дисковые тормоза (2, 3), а на выемку двойного барабана намотан стальной трос (4) не менее чем в два слоя. Система контроля динамической нагрузки состоит из барабанного серводвигателя (8), резьбовой шток которого соединен с зажимом троса (6) с помощью S-образного тензодатчика (7), при этом один конец троса (4) проходит сквозь зажим (6) и фиксируется там. В конструкции выемки и перегородки двойного барабана (16) предусмотрены U-образные сквозные пазы, к внутренней стороне которых прикреплены тензометры. Прибор используется в методе контроля динамических напряжений в многослойном витом тросе и барабане для слежения за динамическими напряжениями, образующимися в стальном тросе в области поверхности двойного барабана и перегородки, в режиме реального времени. 2 н. и 1 з.п. ф-лы, 11 ил.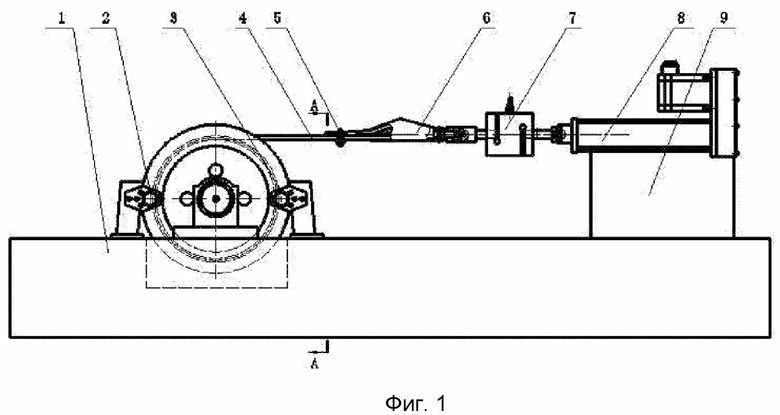
1. Прибор контроля динамического контактного напряжения между барабаном и несколькими слоями намотки троса, включающий в себя опорную систему, систему наматывания, систему контроля динамической нагрузки и систему контроля растяжения, согласно которому:
опорная система состоит из нижней пластины (1) и закрепленной на ней опоры барабанного серводвигателя (9);
система наматывания состоит из электродвигателя (10), высокоскоростной муфты (11), редуктора (12), низкоскоростной муфты (13), первой опоры подшипника (14), первого фрикционного колеса (15), первого дискового тормоза (20), второго дискового тормоза (21), ведущего вала (18), двойного барабана (16), второго фрикционного колеса (17), третьего дискового тормоза (3), четвертого дискового тормоза (2), второй опоры подшипника (19) и стального троса (4), при этом электродвигатель (10) крепится к нижней пластине (1), его выходной вал - к входному концу редуктора (12) с помощью высокоскоростной муфты (11), а выходной вал редуктора (12) – к торцу ведущего вала (18) с помощью низкоскоростной муфты (13), оба конца ведущего вала (18) крепятся на подшипники в первых и вторых опорах (14) и (19), соответственно, при этом первая опора подшипника (14) и вторая опора подшипника (19) закреплены на нижней пластине (1), причем на ведущем валу (18) имеются два диска с фланцем, которые крепятся к двойному барабану (16) с помощью соединительной муфты, при этом первое фрикционное колесо (15) и второе фрикционное колесо (17) располагаются по обеим сторонам двойного барабана (16) и закреплены на высокопрочные болты, первый дисковый тормоз (20) и второй дисковый тормоз (21) крепятся к нижней пластине со стороны первого фрикционного колеса (15), а третий дисковый тормоз (3) и четвертый дисковый тормоз (2) – со стороны второго фрикционного колеса (17), при этом стальной трос (4) намотан на выемку на двойном барабане (16) не менее чем в два слоя;
система контроля динамической нагрузки состоит из барабанного серводвигателя (8), S-образного тензодатчика (7), зажима троса (6) и U-образного фиксатора троса (5), при этом барабанный серводвигатель (8) закреплен на опоре серводвигателя (9), а его резьбовой шток соединен с одним концом S-образного тензодатчика (7), при этом другой конец S-образного тензодатчика (7) соединен с зажимом троса (6), сквозь который проходит один конец троса (4), который фиксируется с помощью U-образного фиксатора (5);
система контроля растяжения состоит из первой группы тензометров (23), второй группы тензометров (25), третьей группы тензометров (27), четвертой группы тензометров (29), тензометров со стороны перегородки второго U-образного сквозного паза (24), четвертого U-образного сквозного паза (28), первого U-образного сквозного паза (22) и третьего U-образного сквозного паза (26), выходящих на прямолинейные отрезки выемки двойного барабана (16), U-образных сквозных пазов, выходящих на перегородку двойного барабана (16), при этом первая группа тензометров (23) крепится к внутренней стенке первого U-образного сквозного паза (22), вторая группа тензометров (25) - к внутренней стенке второго U-образного сквозного паза (24), третья группа тензометров (27) - к внутренней стенке третьего U-образного сквозного паза (26), четвертая группа тензометров (29) - к внутренней стенке четвертого U-образного сквозного паза (28), группа тензометров со стороны перегородки – к внутренним стенкам соответствующих U-образных сквозных пазов со стороны перегородки, при этом количество тензометров со стороны перегородки равно количеству слоев намотки троса (4), а каждый тензометр со стороны перегородки соответствует одному слою намотки.
2. Прибор контроля динамического контактного напряжения между барабаном и несколькими слоями намотки троса по п. 1, отличающийся тем, что первый U-образный сквозной паз (22), второй U-образный сквозной паз (24), третий U-образный сквозной паз (26) и четвертый U-образный сквозной паз (28) располагаются параллельно оси двойного барабана (16).
3. Метод контроля динамических напряжений в многослойном витом тросе и барабане в сверхглубокой скважине согласно вышеприведенному описанию прибора контроля в п. 1, включающий в себя следующие этапы:
а) закрепление всех групп тензометров на внутренних стенках соответствующих U-образных сквозных пазов и всех тензометров со стороны перегородки на внутренних стенках соответствующих U-образных сквозных пазов со стороны перегородки;
б) выбор троса (4) нужной длины, пропускание одного конца троса (4) через зажим 6 и крепление его U-образным фиксатором (5);
в) включение электродвигателя (10) с помощью пульта дистанционного управления, намотка троса (4) на двойной барабан (16), отключение электродвигателя (10), когда трос (4) будет намотан на барабан (16) в нужное количество слоев, включение дисковых тормозов, чтобы остановить движение двойного барабана (16) с помощью фрикционных колес, управление горизонтальным движением барабанного сервопривода (9) с компьютера так, чтобы приложить к тросу (4) заданную усталостную нагрузку или напряжение отказа;
г) задание переменного значения амплитуды смещения барабанного сервопривода (9) с программы компьютерного управления для приложения к стальному тросу (4) динамической переменной нагрузки; моделирование динамического напряжения между тросом (4) и поверхностью двойного барабана (16) и перегородки путем имитации процесса подъема троса (4) в динамике; включение источника питания и запитывание электродвигателя (10), барабанного сервопривода (9), S-образного тензодатчика (8), первой группы тензометров (23), второй группы тензометров (25), третьей группы тензометров (27), четвертой группы тензометров (29) и тензометров со стороны перегородки; регистрация динамического напряжения между тросом (4) и поверхностью двойного барабана (16) с помощью групп тензометров; регистрация динамического напряжения между различными слоями намотки троса (4) на перегородку двойного барабана (16) с помощью тензометров со стороны перегородки;
д) изменение количества слоев намотки троса (4) и значения амплитуды смещения барабанного сервопривода (9) для моделирования динамического контактного напряжения между тросом (4) и поверхностью двойного барабана (16) и его перегородки для различного количества слоев намотки при различной динамической нагрузке.
| CN 104261225 A, 07 | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| CN 101504348 A, 12.08.2009 | |||
| Устройство для измерения силы давления слоев навивки каната на лобовину барабана | 1976 |
|
SU561882A1 |
| Устройство для измерения усилий | 1978 |
|
SU769368A1 |
| Способ демпфирования колебаний виброизолированной машины | 1959 |
|
SU126692A1 |

