Область техники
Настоящее изобретение относится, в целом, к способам и системам для управления двигателем автомобиля для подачи требуемого крутящего момента в устройство вала отбора мощности, соединенное с двигателем.
Уровень техники / Раскрытие изобретения
Устройство вала отбора мощности (ВОМ) может быть подсоединено к автомобилям для обеспечения мощности для запуска таких обслуживаемых механизмов, как бетономешалки, уплотнители мусора, комбайны, снегоочистители и т.д. ВОМ может быть подсоединен к двигателю автомобиля через приводной вал и может непосредственно выводить рабочую мощность из выходного момента двигателя. Во время работы устройства ВОМ, двигатель может работать с запрошенной (более высокой) частотой вращения, чтобы обеспечить требуемый крутящий момент, основанный на нагрузке ВОМ.
Разработаны различные подходы к работе устройства ВОМ. Один из примерных подходов, показанный Yu с соавторами в патенте США 7377103, раскрывает способ для работы устройства ВОМ, когда подача мощности на устройство ВОМ из двигателя инициируется после подтверждения того, что выходной крутящий момент двигателя выше, чем требуемый крутящий момент устройства ВОМ. Как только режим ВОМ активируется оператором, контроллер двигателя может регулировать подачу воздуха и топлива в двигатель, чтобы поддерживать частоту вращения двигателя на уровне частоты вращения двигателя, требуемом для работы ВОМ. Таким образом, устройство ВОМ работает, пока автомобиль находится в неподвижном состоянии, так что выходная мощность двигателя регулируется в зависимости от изменяющейся нагрузки ВОМ.
Тем не менее, авторы настоящего изобретения признают потенциальные проблемы таких систем. В качестве одного из примеров, подход Yu не может использоваться, пока автомобиль находится в движении. В частности, оператору может понадобиться привести автомобиль в движение во время работы устройства ВОМ. В результате может потребоваться регулировка выходной мощности двигателя не только для изменения нагрузки ВОМ, но также для изменения крутящего момента на колесе во время событий ускорения, а также во время замедления. Если, во время нажатия педали акселератора, не обеспечивается достаточный крутящий момент, автомобиль может стать инертным и/или может ухудшиться производительность ВОМ. С другой стороны, во время торможения автомобиля (отпускания педали акселератора) оператор может не иметь возможности оптимизировать положение педали, а контроллер двигателя может снизить частоту вращения двигателя (в связи с уменьшением запроса водителя) ниже частоты вращения, требуемой для поддержания нагрузки ВОМ. В результате двигатель может заглохнуть. Поэтому при работе устройства ВОМ продвижение автомобиля, содержащее переходы между режимами ускорения автомобиля и режимами замедления, может быть неустойчивым.
В одном из примеров, вышеописанные проблемы могут быть устранены с помощью способа для автомобиля с устройством вала отбора (ВОМ), соединенным с двигателем, в котором: оценивают нагрузку ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора; и регулируют выходной крутящий момент двигателя на основе оцененной нагрузки ВОМ во время перехода между состояниями двигателя. Таким образом, во время ускорения автомобиля, потребность в крутящем моменте ВОМ могут оценивать и использовать в качестве входного значения для управления частотой вращения и крутящим моментом двигателя во время событий замедления автомобиля.
В качестве одного из примеров, автомобиль может содержать двигатель и устройство ВОМ, соединенное с двигателем. Двигатель может быть соединен с колесами автомобиля через гидротрансформатор и систему трансмиссии. Система управления автомобилем может регулировать профиль частоты вращения двигателя на основе запросов крутящего момента ВОМ, а также запросов продвижения автомобиля. Оператор автомобиля может приводить в действие переключатель для выбора между статическим режимом работы ВОМ, в котором устройство ВОМ работает, когда автомобиль находится в неподвижном состоянии, и мобильным режимом работы ВОМ, в котором устройство ВОМ работает, когда автомобиль находится в движении (автомобиль приводится в движение с использованием крутящего момента двигателя). В статическом режиме ВОМ, контроллер может регулировать каждое из положения дросселя, момента зажигания, и графика подачи топлива двигателя для регулировки частоты вращения двигателя и выходного крутящего момента двигателя на основе переменной нагрузки устройства ВОМ. Если оператор нажимает на педаль акселератора в стационарном режиме, стационарный режим может быть остановлен, и двигатель может не поддерживать нагрузку ВОМ. Вместо этого, для приведения автомобиля в движение может использоваться выходная мощность двигателя. В мобильном режиме работы ВОМ, во время событий ускорения автомобиля может быть оценен необработанный неотфильтрованный требуемый крутящий момент ВОМ на основе выходного крутящего момента двигателя относительно выходного крутящего момента гидротрансформатора. Могут оцениваться колебания требуемого крутящего момента ВОМ и может быть рассчитан отфильтрованный требуемый крутящий момент ВОМ с использованием переменной временной константы. Отфильтрованный требуемый крутящий момент ВОМ может использоваться контроллером в сочетании с запрашиваемым водителем крутящим моментом для регулировки каждого из положения дросселя, момента зажигания, и графика подачи топлива двигателя для запуска устройства ВОМ, одновременно перемещая транспортное средство. Во время последующего события замедления автомобиля, крутящий момент ВОМ, полученный во время предшествующего события ускорения, может использоваться в качестве входного значения для контроллера заданной частоты вращения двигателя (Ne) (например, используя пропорционально-интегрально-дифференциальное регулирование ПИД), который регулирует выходной крутящий момента двигателя (заданный крутящий момент), так что крутящий момент, требуемый устройством ВОМ, продолжает подаваться даже когда запрос водителя уменьшается.
Таким образом, получая запрос крутящего момента ВОМ во время ускорения автомобиля (также, ВОМ может оцениваться во время работы с постоянной скоростью и замедления), можно продолжать подавать достаточный крутящий момент на устройство ВОМ во время последующего события замедления. Например, частота вращения двигателя может быть снижена с меньшей скоростью, чем требуется, на основе снижения запроса водителя. Кроме того, устройство ВОМ может оптимально функционировать, даже когда изменяется запрос водителя, а также когда изменяется нагрузка ВОМ. Технический эффект от управления частотой вращения двигателя во время события отпускания педали акселератора заключается в том, что крутящий момент, требуемый устройством ВОМ, может быть подан путем ограничения уменьшения частоты вращения двигателя, тем самым предотвращая заглохание двигателя. Кроме того, устройства ВОМ могут эксплуатироваться при всех режимах движения автомобиля, содержащих как стационарные, так и мобильные режимы с уменьшенной вероятностью событий заглохания и дерганья двигателя.
Следует понимать, что вышеприведенное краткое раскрытие служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно. Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после осуществления изобретения. Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание чертежей
На фиг. 1 изображена примерная конфигурация цепи привода автомобиля, содержащей устройство вала отбора мощности (ВОМ).
На фиг. 2 показан примерный вариант осуществления системы двигателя.
На фиг. 3 показана блок-схема, иллюстрирующая примерный способ, который может быть реализован для работы устройства ВОМ в статическом режиме.
На фиг. 4 показана блок-схема, иллюстрирующая примерный способ, который может быть реализован для работы устройства ВОМ в мобильном режиме.
На фиг. 5 показан пример работы устройства ВОМ в статическом и мобильном режимах, в соответствии с настоящим изобретением.
На фиг. 6 показана блок-схема примерной управляющей процедуры, используемой для управления частотой вращения двигателя во время работы устройства ВОМ.
Осуществление изобретения
Настоящее изобретение относится к системам и способам для регулировки рабочих параметров двигателя для подачи требуемого крутящего момента на устройство вала отбора мощности, соединенного с двигателем. Примерная конфигурация цепи привода автомобиля с устройством ВОМ, соединенным с двигателем, показана на фиг. 1. Примерная система двигателя, содержащая контроллер для управления устройством ВОМ, показана на фиг. 2. Контроллер двигателя может быть выполнен с возможностью выполнения управляющих процедур, таких как примерные процедуры на фигурах 3 и 4 для работы устройства ВОМ в статическом режиме и мобильном режиме, соответственно. Пример работы ВОМ в статическом режиме и в мобильном режиме, в том числе во время переходов между состояниями двигателя (событиями ускорения и замедления), показан на фиг. 5. Система управления, такая как система управления ПИД на фиг. 6, может использоваться для управления частотой вращения двигателя во время работы устройства ВОМ.
На фиг. 1 показан двигатель 10 внутреннего сгорания, дополнительно раскрытый в настоящем документе со ссылками на фиг. 2, соединенный с гидротрансформатором 11 через коленчатый вал 13. Устройство вала отбора мощности, например, бетономешалка, уплотнитель мусора, комбайн, или снегоочиститель может быть соединено с двигателем 10 через карданный вал 9. Двигатель может подавать мощность как на устройство 12 ВОМ (при его работе), так и на гидротрансформатор 11. Гидротрансформатор 11 может быть расположен ниже по потоку (в смысле потока крутящего момента) от устройства 12 ВОМ относительно двигателя 10. Система управления автомобилем может регулировать профиль частоты вращения двигателя на основе запросов крутящего момента ВОМ, а также запросов продвижения автомобиля. На основе пользовательского ввода, устройство ВОМ может работать, когда автомобиль находится в неподвижном состоянии или в движении. Переключатель на приборной панели транспортного средства может использоваться для выбора между работой устройства ВОМ в статическом режиме (когда автомобиль неподвижен) или в мобильном режиме (когда автомобиль находится в движении). В мобильном режиме, во время ускорения автомобиля (нажатие педали акселератора) или во время установившегося движения, может быть найдена нагрузка ВОМ (запрос крутящего момента) и могут регулироваться частота вращения двигателя и соответствующий крутящий момент двигателя для обеспечения требуемого ВОМ запроса крутящего момента.
Трансмиссия 15 может быть присоединена ниже по потоку от двигателя 10 в цепи привода через гидротрансформатор 11. Гидротрансформатор 11 может быть соединен с трансмиссией 15 через ведущий вал 17 трансмиссии. Датчик 18 частоты вращения может быть соединен с ведущим валом 17 трансмиссии для оценки выходного крутящего момента гидротрансформатора 15 во время эксплуатации автомобиля. Гидротрансформатор 11 может иметь обводное сцепление, которое может быть зацеплено, расцеплено, или частично зацеплено. Когда сцепление расцеплено или частично зацеплено, считается, что гидротрансформатор находится в разблокированном состоянии. Когда сцепление полностью зацеплено, гидротрансформатор действует как карданный вал, непосредственно соединяющий двигатель 10 с трансмиссией 15. Трансмиссия 15 также содержит различные другие передачи, такие как, например, передаточное число главной передачи (не показано). Трансмиссия 15 также может быть соединена с шиной 19 через ось 21. Шина 19 соединяет автомобиль (не показано) с дорогой 23. В предпочтительном варианте осуществления, трансмиссия 15 имеет следующие варианты выбора водителем: парковка (Р), задний ход (R), нейтраль (N), движение (D) и низшая передача (L). Водитель выбирает эти положения через рычаг передачи. В частности, в парковочном или нейтральном положении, трансмиссия 15 не передает крутящий момент от входа трансмиссии на выход. В положении движения, контроллер трансмиссии может управлять трансмиссией для выбора любых доступных передаточных чисел. В положении заднего хода, выбирается одна передача заднего хода. В положении низшей передачи, электронный контроллер может выбирать только более низший набор передаточных чисел переднего хода. Рычаг трансмиссии может быть расположен на колонке рулевого управления или между сиденьями водителя и пассажира.
Фиг. 2 является упрощенной схемой, на которой показан один цилиндр многоцилиндрового двигателя 101 в системе 100 двигателя. Система двигателя может быть соединена с движительной системой, такой как эксплуатируемый автомобиль. В одном из примеров, система 100 двигателя может быть двигателем 10 внутреннего сгорания, изображенным на фиг. 1. Устройство 103 вала отбора мощности (ВОМ) может быть соединено с двигателем через карданный вал. Двигатель 101 может управляться, по меньшей мере, частично системой управления, содержащей контроллер 12 и вводом от оператора 132 автомобиля через устройство 130 ввода. В этом примере, устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для генерации сигнала, пропорционального сигналу положению педали ПП. Крутящий момент, создаваемый двигателем, может использоваться для приведения автомобиля в движение и работы устройства ВОМ.
Устройство ВОМ, соединенное с двигателем, может управляться на основе ввода от оператора 132 автомобиля через переключатель. Переключатель 127 для выбора статического режима работы устройства ВОМ и переключатель 128 для выбора мобильного режима работы устройства ВОМ могут содержаться на приборной панели 129 автомобиля. Оператор автомобиля может приводить в действие один из двух переключателей 127 и 128 для инициирования или завершения работы устройства ВОМ в статическом режиме (автомобиль неподвижен) или в мобильном режиме (автомобиль в движении), соответственно.
Камера сгорания (цилиндр) 30 двигателя 101 может содержать стенки 32 камеры сгорания с расположенным в них поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 таким образом, что возвратно-поступательное движение поршня переводится во вращательное движение коленчатого вала. Датчик 41 частоты вращения коленчатого вала может быть соединен с коленчатым валом 40, что может использоваться для измерения выходного крутящего момента двигателя. Коленчатый вал 40 может быть соединен с по меньшей мере одним приводным колесом автомобиля через промежуточную систему трансмиссии. Кроме того, стартерный мотор может быть соединен с коленчатым валом 40 через маховик для обеспечения запуска двигателя 101.
Камера 30 сгорания может принимать воздух на впуске из впускного коллектора 44 через впускной канал 42 и может выпускать выделяющиеся при горении газы через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут выборочно сообщаться с камерой 30 сгорания через соответствующие впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления, камера 30 сгорания может содержать два или более впускных клапанов и/или два или более выпускных клапанов.
В данном примере, регулировка впускного клапана 52 и выпускного клапана 54 может осуществляться кулачковым приводом с помощью соответствующих систем 51 и 53 кулачкового привода. Каждая из систем 51 и 53 кулачкового привода может содержать один или более кулачков и использовать одну или более из систем переключения профилей кулачков (ППК), изменения фаз кулачкового распределения (ИФКР), изменения фаз газораспределения (ИФГ), и/или изменения высоты подъема клапанов (ИВПК), которые могут управляться контроллером 12 для регулирования работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 можно определить с помощью датчиков 55 и 57 положения, соответственно. В альтернативных вариантах осуществления, впускной клапан 52 и/или выпускной клапан 54 могут регулироваться с помощью электропривода клапанов. Например, камера 30 сгорания может альтернативно содержать впускной клапан, регулируемый с помощью электропривода клапанов и выпускной клапан, регулируемый с помощью кулачкового привода, содержащего системы ППК и/или ИФКР.
Топливный инжектор 66 показан соединенным напрямую с камерой 30 сгорания для непосредственного впрыска туда топлива соразмерно ширине импульса сигнала ШИВТ, полученного от контроллера 12 через электронный драйвер 68. Таким образом, топливный инжектор 66 обеспечивает так называемый прямой впрыск топлива в камеру 30 сгорания. Топливный инжектор может быть установлен в боковой части камеры сгорания или, например, в верхней части камеры сгорания (как показано). Топливо может доставляться в топливный инжектор 66 с помощью топливной системы (не показана), содержащей топливный бак, топливный насос, и топливную рампу. В некоторых вариантах осуществления, камера 30 может альтернативно или дополнительно содержать топливный инжектор, расположенный во впускном коллекторе 44 в конфигурации, которая обеспечивает так называемый распределенный впрыск топлива во впускное окно выше по потоку от камеры 30 сгорания.
Впускной канал 42 может содержать дроссель 62, имеющий дроссельную заслонку 64. В данном конкретном примере, угол поворота дроссельной заслонки 64 может изменяться контроллером 12 через сигнал, подаваемый на электрический мотор или исполнительный механизм, относящийся к дросселю 62 - такую конфигурацию обычно называют электронной регулировкой дросселя (ЭРД). Таким образом, дроссель 62 может использоваться для изменения подачи впускного воздуха в камеру 30 сгорания среди других цилиндров двигателя. Угол поворота дроссельной заслонки 64 может предоставляться контроллеру 12 посредством сигнала положения дросселя ПД. Регулировка положения дроссельной заслонки 64 может выполняться для управления частотой вращения двигателя. Впускной канал 42 может содержать датчик 125 температуры воздуха на впуске (ТВВ) и датчик 105 барометрического давления (БД). Датчик 125 ТВВ оценивает температуру воздуха на впуске, которая будет использоваться для операций двигателя и подает сигнал на контроллер 12. Аналогично, датчик 105 БД оценивает наружное давление для операций двигателя и подает сигнал на контроллер 12. Впускной канал 42 может дополнительно содержать датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для подачи соответствующих сигналов ДВК и МРВ на контроллер 12.
Датчик 126 кислорода в отработавших газах показан соединенным с выпускным каналом 48 выше по потоку от устройства 70 контроля выбросов. Датчик 126 может быть любым подходящим датчиком для обеспечения индикации воздушно-топливного отношения отработавших газов, таким как линейный датчик кислорода или УДКОГ (универсальный или широкополосный датчик кислорода в отработавших газах), датчик кислорода в двух состояниях ДКОГ, НДКОГ (ДКОГ с подогревом), датчик NOx, НС, или СО. Устройство 70 контроля выбросов показано расположенным вдоль выпускного канала 48 ниже по потоку от датчика 126 кислорода в отработавших газах. Устройство 70 может быть трехкомпонентным каталитическим нейтрализатором (ТКН), уловителем NOx, различными другими устройствами контроля выбросов, или их комбинациями. В некоторых примерах, во время эксплуатации двигателя 101, устройство 70 контроля выбросов может периодически переустанавливаться, управляя по меньшей мере одним цилиндром двигателя в пределах определенного воздушно-топливного отношения.
Дополнительно, система 140 рециркуляции отработавших газов (РОГ) может направлять требуемую часть отработавших газов из выпускного канала 48 во впускной коллектор 44 через канал 142 РОГ. Количество газов РОГ, поступающее во впускной коллектор 44, может изменяться с помощью контроллера 12 через клапан 144 РОГ. Дополнительно, датчик 146 РОГ может быть расположен внутри канала 142 РОГ и может предоставлять индикацию одного или более из давления, температуры, и составной концентрации отработавших газов. При некоторых условиях, система 140 РОГ может использоваться для регулирования температуры воздушно-топливной смеси внутри камеры сгорания, тем самым обеспечивая способ регулирования установки зажигания во время некоторых режимов сгорания. Дополнительно, в некоторых условиях часть выделяющихся при горении газов, может удерживаться или задерживаться в камере сгорания, контролируя изменение фаз выпускного клапана, например, посредством управления механизмом изменения фаз газораспределения.
Контроллер 12 показан на фиг. 2 в виде микрокомпьютера, содержащего микропроцессорное устройство 102, входной/выходной порты 104, электронный накопитель для исполняемых программ и калибровочных значений, показанный в виде чипа 106 постоянного запоминающего устройства в данном конкретном примере, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110, и шину данных. Контроллер 12, в дополнение к ранее упомянутым сигналам, может принимать различные сигналы от датчиков, подсоединенных к двигателю 101, показанному на фиг. 2, и системе автомобиля (показана на фиг. 1), содержащие измерения выходного крутящего момента двигателя от датчика 41 частоты вращения коленчатого вала, соединенного с коленчатым валом 40; выходного крутящего момента гидротрансформатора от датчика частоты вращения ведущего вала трансмиссии (например, датчика 18 на фиг. 1); массового расхода засосанного воздуха (МРВ) от датчика 120 массового расхода воздуха; температуру хладагента двигателя (ТХД) от датчика 112 температуры, соединенного с рукавом 114 охлаждения; сигнал профиля зажигания (ПЗ) от датчика 118 Холла (или другого типа), соединенного с коленчатым валом 40; положение дросселя (ПД) от датчика положения дросселя; и сигнал абсолютного давления в коллекторе (ДВК) от датчика 122. Сигнал частоты вращения двигателя, в об/мин, может генерироваться контроллером 12 на основе сигнала ПЗ от датчика и запрашиваемого устройством ВОМ крутящего момента, оцениваемого на основе выходного крутящего момента двигателя и выходного крутящего момента гидротрансформатора. Сигнал давления в коллекторе ДВК от датчика давления в коллекторе может использоваться для обеспечения индикации вакуума или давления во впускном коллекторе. Следует отметить, что могут быть использованы различные комбинации вышеуказанных датчиков, например, датчик МРВ без датчика ДВК, или наоборот. При стехиометрической работе, датчик ДВК может предоставлять индикацию крутящего момента двигателя. Кроме того, этот датчик, наряду с измеренной частотой вращения двигателя, может обеспечить оценку заряда (содержащего воздух), засасываемого в цилиндр. В одном из примеров, датчик 118, который также используется в качестве датчика частоты вращения двигателя, может выдавать заданное число равномерно распределенных импульсов на каждый оборот коленчатого вала.
Носитель 106 с постоянным запоминающим устройством может быть запрограммирован машиночитаемыми данными, представляющими команды в долговременной памяти, исполняемые процессором 102 для осуществления раскрытых ниже способов, а также других предполагаемых, но конкретно не перечисленных вариантов. Как раскрыто выше, на фиг. 1 показан один цилиндр многоцилиндрового двигателя, и каждый цилиндр может аналогичным образом содержать собственный комплект впускных/выпускных клапанов, топливный инжектор, свечу зажигания и т.д.
Контроллер 12 принимает сигналы от различных датчиков, показанных на фиг. 1, и использует различные исполнительные механизмы, показанные на фиг. 1, для регулирования работы двигателя на основе полученных сигналов и инструкций, хранящихся в памяти контроллера 12. В одном из примеров, контроллер 12 может использовать оценку выходного крутящего момента двигателя, полученную от датчика 41 частоты вращения коленчатого вала и оценки выходного крутящего момента гидротрансформатора, полученной от датчика частоты вращения ведущего вала трансмиссии, чтобы рассчитать запрашиваемый устройством ВОМ крутящий момент, и для подачи требуемого ВОМ крутящего момента, контроллер 12 может регулировать одно или более из графика подачи топлива топливного инжектора 66, момента зажигания свечи зажигания, и положения дроссельной заслонки 64 дросселя 62 для регулировки профиля частоты вращения двигателя (например, используя пропорционально-интегрально-дифференциальное регулирование ПИД) и обеспечения требуемого выходного крутящего момента двигателя.
Следует понимать, что в дальнейшем представлении, система 100 двигателя может быть системой дизельного двигателя, работающей с использованием в качестве топлива дизельное топливо. В дизельном двигателе, система искрового зажигания может быть заменена системой воспламенения от сжатия. В другом примере, система 100 двигателя может быть частью гибридного электрического автомобиля или подключаемого гибридного электромобиля. Устройство ВОМ может быть соединено с автомобилями, содержащими каждое из бензинового двигателя, дизельного двигателя, и гибридной цепи привода.
Таким образом, системы, показанные на фиг. 1 и 2, представляют систему автомобиля, содержащую: двигатель, датчик частоты вращения коленчатого вала, устройство вала отбора мощности (ВОМ), соединенное с двигателем, первый и второй переключатель ВОМ, гидротрансформатор, соединяющий двигатель с системой трансмиссии, датчик частоты вращения ведущего вала трансмиссии, и контроллер с машиночитаемыми инструкциями, хранящимися в долговременной памяти для следующих действий: в соответствии с приведением в действие первого переключателя ВОМ, инициируют первый статический режим работы устройства ВОМ, при котором автомобиль находится в неподвижном положении и запрос крутящего момента ВОМ удовлетворяют с использованием крутящего момента двигателя, и в соответствии с приведением в действие второго переключателя ВОМ, инициируют второй мобильный режим работы устройства ВОМ, при котором автомобиль находится в движении и каждое из запроса крутящего момента ВОМ и крутящего момента на колесе выполняют с использованием крутящего момента двигателя, когда изменяется запрос водителя.
На фиг. 3 показан примерный способ 300 для работы устройства вала отбора мощности (ВОМ) (такого как устройство 12 ВОМ, показанное на фиг. 1) в статическом режиме, например, когда автомобиль неподвижен. Инструкции для выполнения способа 300 и остальные способы, приведенные здесь, могут выполняться контроллером на основе инструкций, хранящихся в памяти контроллера, и в сочетании с сигналами, полученными от датчиков системы двигателя, таких как датчики, раскрытые выше со ссылками на фиг. 2. Контроллер может использовать исполнительные механизмы системы двигателя для регулировки работы двигателя в соответствии со способами, раскрытыми ниже.
На шаге 302, контроллер может определить рабочие условия двигателя и автомобиля на основе входных сигналов от множества датчиков. Рабочие условия двигателя могут содержать скорость автомобиля, нагрузку двигателя, температуру двигателя, частоту вращения двигателя, запрошенный водителем крутящий момент, передаточное число трансмиссии, и т.д.
На шаге 304, контроллер может получать входной сигнал от контрольных переключателей устройства ВОМ на приборной панели (такие как переключатели 127 и 128 на фиг. 2). Оператор автомобиля может приводить в действие переключатель для выбора между статическим режимом работы ВОМ, в котором устройство ВОМ работает, когда автомобиль находится в неподвижном состоянии, и мобильным режимом работы ВОМ, в котором устройство ВОМ работает при движущемся автомобиле. На шаге 306, процедура содержит определение того, выбран ли/приведен в действие статический режим ВОМ оператором через вход переключателя.
Если подтверждается, что оператором выбран статический режим ВОМ, на шаге 308, контроллер может инициировать работу двигателя в статическом режиме ВОМ. Для того, чтобы инициировать работу в статическом режиме, контроллер может подтвердить, что автомобиль находится в неподвижном состоянии и нет запроса крутящего момента для приведения автомобиля в движение (например, оператор не нажал на педаль акселератора). Кроме того, контроллер может подтвердить, что частота вращения двигателя была повышена до пороговой частоты вращения (выше частоты вращения (об/мин) холостого хода двигателя) до того, как была запрошена работа в статическом режиме (например, оператор привел в действие переключатель статического режима), в котором контроллер может повысить частоту вращения двигателя до заданного порогового значения. На шаге 310, в соответствии с запросом на работу в статическом режиме, частота вращения двигателя может быть увеличена и установлена в частоту вращения холостого хода статического режима (заданную частоту вращения) на основе запроса крутящего момента ВОМ. Частота вращения холостого хода статического режима может быть выше относительно частоты вращения холостого хода, применяемой во время работы двигателя без нагрузки ВОМ. Поскольку автомобиль неподвижен, крутящий момент двигателя, создаваемый двигателем на заданной частоте вращения двигателя, может быть полностью использован для работы ВОМ и не подается на гидротрансформатор. Частота вращения двигателя может регулироваться непрерывно в зависимости от изменения нагрузки ВОМ. Например, частота вращения двигателя может быть увеличена по мере увеличения нагрузки ВОМ, и частота вращения двигателя может быть уменьшена (но не ниже частоты вращения холостого хода статического режима) по мере уменьшения нагрузки ВОМ. На шаге 312, во время работы в статическом режиме ВОМ, контроллер может регулировать один или более исполнительных механизмов крутящего момента двигателя, таких как каждый из положения дросселя, момента зажигания, и графика подачи топлива двигателя для поддержания заданной частоты вращения двигателя и для производства достаточного выходного крутящего момента двигателя для удовлетворения изменяющегося запроса крутящего момента (то есть, нагрузки) устройства ВОМ. Таким образом, устройство ВОМ может работать в статическом режиме путем установки заданной частоты вращения холостого хода двигателя, основанной на нагрузке ВОМ, и регулировки работы двигателя для поддержания заданной частоты вращения холостого хода двигателя.
На шаге 314, процедура содержит определение того, выключен ли/деактивирован статический режим ВОМ, или было ли изменение положения педали акселератора (например, событие нажатия педали акселератора) вызванное оператором. В качестве одного из примеров, работа устройства ВОМ может быть завершена в соответствии с событием педали водителя/изменением запроса водителя, получаемым при работе устройства ВОМ посредством двигателя в статическом режиме. Если подтверждается, что переключатель статического ВОМ выключен или есть событие нажатия педали акселератора, на шаге 316, контроллер может выйти из (приостановить) работы/у двигателя в статическом режиме ВОМ. Поскольку статический режим ВОМ работает только в условиях, когда транспортное средство неподвижно, движение транспортного средства при нажатии на педаль акселератора может привести к приостановке работы ВОМ в статическом режиме. На шаге 318, одно или более из положения дросселя, момента зажигания, и графика подачи топлива может регулироваться для контроля частоты вращения двигателя на основе запроса водителя и независимо от нагрузки ВОМ. Поскольку на данном этапе устройство ВОМ больше не приводится в действие двигателем, весь крутящий момент двигателя может использоваться для обеспечения запроса водителя. Таким образом, устройство ВОМ может работать в статическом режиме путем установки заданной частоты вращения холостого хода двигателя, основанной на нагрузке ВОМ, и регулировки работы двигателя для поддержания заданной частоты вращения холостого хода двигателя.
Если на шаге 306, определяется, что статический режим ВОМ не выбран, на шаге 320 процедура содержит определение того, выбран ли оператором мобильный режим ВОМ. В мобильном режиме ВОМ, устройство ВОМ может работать во время движения автомобиля. В этом режиме, полный крутящий момент двигателя может быть разделен между крутящим моментом ВОМ и крутящим моментом гидротрансформатора (который затем переходит в крутящий момент на колесе для приведения автомобиля в движение). Если определяется, что мобильный режим ВОМ выбран, на шаге 324, контроллер может инициировать работу двигателя в мобильном режиме ВОМ, в котором часть крутящего момента двигателя используется для поддержки работы устройства ВОМ, а оставшийся крутящий момент используется для работы автомобиля. Работа в мобильном режиме ВОМ содержит, на шаге 325, в условиях, когда гидротрансформатор разблокирован (или находится в процессе разблокирования), например, когда автомобиль работает ниже пороговой скорости автомобиля (например, ниже 40 или 45 ми/ч), могут непрерывно оценивать нагрузку ВОМ, и соответственно регулировать работу двигателя, чтобы соответствовать изменениям запроса водителя при сохранении работы устройства ВОМ. Другими словами, крутящий момент двигателя могут непрерывно регулировать, чтобы соответствовать изменяющейся нагрузке ВОМ, а также изменяющемуся запросу водителя/крутящему моменту на колесе. Таким образом, в условиях, когда скорость автомобиля выше порогового значения, например, на уровне 40 или 45 ми/ч, гидротрансформатор может быть заблокирован посредством блокирующей муфты. В таких условиях, гидротрансформатор работает как соединение по текучей среде между двигателем и системой трансмиссии и обеспечивает умножение крутящего момента. Таким образом, когда гидротрансформатор заблокирован, оценка нагрузки ВОМ, основанная на крутящем моменте двигателя относительно крутящего момента на ведущем валу трансмиссии (или крутящего момента гидротрансформатора), может быть неточной. Следовательно, на шаге 326, работа в мобильном режиме ВОМ содержит, что в условиях, когда гидротрансформатор заблокирован, приостанавливают оценку нагрузки ВОМ. В то же время, ранее оцененное (например, в течение непосредственно предшествующего периода работы с разблокированным гидротрансформатором) значение нагрузки ВОМ (или запрашиваемого ВОМ крутящего момента) может использоваться для регулировки выходного момента двигателя, когда изменяется запрос водителя. Подробное раскрытие работы двигателя в мобильном режиме ВОМ, содержащей оценку нагрузки ВОМ и использование оценки нагрузки ВОМ для регулировки мощности двигателя, рассматривается на фиг. 4.
На фиг. 4 показан примерный способ 400 для работы устройства вала отбора мощности (ВОМ) (такого как устройство 12 ВОМ, показанное на фиг. 1) в мобильном режиме, например, когда автомобиль находится в движении. На шаге 402, после инициирования мобильного режима ВОМ (как раскрыто на шаге 326 на фиг. 3) процедура содержит определение того, ускоряется ли автомобиль. Во время ускорения автомобиля, каждое из запрошенного крутящего момента для работы автомобиля и запрошенного крутящего момента для работы ВОМ может быть запрошено оператором путем увеличения положения нажатия педали акселератора. Путем увеличения нажатия педали акселератора, может создаваться достаточный крутящий момент двигателя для одновременных операций с автомобилем и ВОМ. Определение того, ускоряется ли автомобиль, может содержать подтверждение того, что гидротрансформатор разблокирован. Как было сказано ранее, оценка нагрузки ВОМ может быть точно выполнена, когда гидротрансформатор разблокирован, например, когда автомобиль работает на скорости меньшей пороговой скорости (например, ниже 45 ми/ч). Если определяется, что автомобиль в настоящее время не ускоряется, на шаге 404 контроллер может ждать ускорения автомобиля, прежде чем продолжить расчет оценки нагрузки ВОМ. Следует понимать, что, если гидротрансформатор заблокирован, например, выше пороговой скорости, контроллер может временно приостановить оценку нагрузки ВОМ пока гидротрансформатор не будет разблокирован. В то же время, запрашиваемый ВОМ крутящий момент может быть удовлетворен за счет регулировки выходной мощности двигателя на основе более ранней оценки нагрузки/крутящего момента ВОМ или базовой (например, средней) оценки крутящего момента ВОМ.
Если подтверждается, что автомобиль ускоряется (и гидротрансформатор разблокирован), на шаге 406 необработанный неотфильтрованный крутящий момент ВОМ (или нагрузка ВОМ), запрошенный устройством ВОМ, может быть оценен как функция от выходного крутящего момента двигателя и выходного крутящего момента гидротрансформатора. В качестве альтернативы, необработанный нефильтрованный крутящий момент ВОМ может быть оценен на основе выходного крутящего момента двигателя и одного или более из крутящего момента гидротрансформатора, входного крутящего момента системы трансмиссии и выходного крутящего момента системы трансмиссии. Выходной крутящий момент двигателя может быть оценен через датчик частоты вращения коленчатого вала, а выходной крутящий момент гидротрансформатора может быть оценен через датчик частоты вращения ведущего вала трансмиссии, причем трансмиссия соединена с гидротрансформатором ниже по потоку от гидротрансформатора в смысле потока крутящего момента. В одном из примеров, необработанный неотфильтрованный крутящий момент ВОМ может быть определен используя уравнение 1:

где  - необработанный крутящий момент ВОМ, рассчитанный из Teng, который является полным выходным крутящим моментом двигателя в качестве упреждающего результата, и f (Ttc), которая является функцией от выходного крутящего момента гидротрансформатора в качестве упреждающего результата на открытом гидротрансформаторе. Таким образом, эта разность является некомпенсированной нагрузкой ВОМ или некомпенсированной утечкой крутящего момента на двигателе.
- необработанный крутящий момент ВОМ, рассчитанный из Teng, который является полным выходным крутящим моментом двигателя в качестве упреждающего результата, и f (Ttc), которая является функцией от выходного крутящего момента гидротрансформатора в качестве упреждающего результата на открытом гидротрансформаторе. Таким образом, эта разность является некомпенсированной нагрузкой ВОМ или некомпенсированной утечкой крутящего момента на двигателе.
На шаге 408 переменная временная константа может быть откалибрована на основе разности между фактической нагрузкой ВОМ и заданным значением нагрузки ВОМ. Таким образом, можно было бы установить более высокий коэффициент усиления для более высокой разности крутящего момента. Нагрузка ВОМ может изменяться в зависимости от условий работы устройства ВОМ. Переменная временная константа может быть использована на шаге 410 для расчета отфильтрованного запроса крутящего момента ВОМ с учетом колебаний нагрузки ВОМ с течением времени. В одном из примеров, переменная константа основана на средних колебаниях требуемого (необработанного) крутящего момента ВОМ в течение продолжительности движения автомобиля, в то время как автомобиль ускоряется или работает на установившихся скоростях.
На шаге 412, ускорение двигателя может быть рассчитано и отфильтровано с использованием мгновенной производной частоты вращения двигателя и откалиброванной временной константы мобильного ВОМ. Кроме того, может быть оценен инерционный член, который является дополнительным коэффициентом усиления для этого отфильтрованного члена, характеризующего ускорение.
На шаге 414, могут быть рассчитаны упреждающие регулировки крутящего момента двигателя для компенсации динамических изменений нагрузки ВОМ.
Упреждающие регулировки могут выполняться как функция от необработанной (неотфильтрованной) нагрузки ВОМ и отфильтрованной нагрузки ВОМ. Упреждающая регулировка крутящего момента может поддерживаться постоянной при небольших изменениях крутящего момента ВОМ. Тем не менее, для больших изменений, наблюдаемых для крутящего момента ВОМ, может быть откалиброван подаваемый в контроллер крутящий момент для регулировки частоты вращения двигателя и крутящего момента двигателя. На основе необработанного и отфильтрованного крутящего момента ВОМ, на шаге 416 контроллер, такой как пропорционально-интегрально-дифференциальный (ПИД) контроллер может назначать коэффициенты усиления для регулировки одного или более из положения дросселя, момента зажигания, и графика подачи топлива для удовлетворения запросов крутящего момента ВОМ и крутящего момента гидротрансформатора. Коэффициенты усиления контроллера могут регулироваться на основе нагрузки ВОМ и изменений нагрузки ВОМ. В качестве одного из примеров, коэффициенты усиления могут быть увеличены при увеличении нагрузки ВОМ. Таким образом, крутящий момент двигателя могут регулировать для содействия работе устройства ВОМ, когда автомобиль находится в движении.
На шаге 418, процедура содержит определение того, замедляется ли затем автомобиль. Автомобиль может замедляться во время события отпускания педали акселератора после предшествующего события нажатия педали акселератора. Соответственно, подача крутящего момента ВОМ может быть адаптирована из-за события замедления. Если определяется, что автомобиль не замедляется (например, во время установившейся работы автомобиля), на шаге 420 может быть продолжена регулировка крутящего момента двигателя для поддержания подачи крутящего момента ВОМ и крутящего момента цепи привода (например, крутящего момента гидротрансформатора).
Таким образом, когда автомобиль замедляется, в то время как устройство ВОМ одновременно работает через двигатель, существует риск того, что двигатель и автомобиль могут остановиться. Это связано с уменьшением выходного крутящего момента двигателя для удовлетворения падения запроса водителя (таким образом, улучшая управляемость и уменьшая ощущение срывания). Тем не менее, во время замедления, продолжающееся присутствие нагрузки ВОМ может вызвать более быстрое замедление двигателя чем требуется, что приводит к заглоханию. Для уменьшения этой проблемы, контроллер может использовать нагрузку ВОМ, найденную во время предыдущего события ускорения, для регулировки профиля частоты вращения двигателя во время последующего события замедления. Кроме того, во время работы автомобиля, когда гидротрансформатор заблокирован, оценка нагрузки ВОМ может быть ошибочной, поэтому при таких условиях для регулировки выходного крутящего момента двигателя может использоваться нагрузка ВОМ, найденная во время предшествующего периода, когда гидротрансформатор был разблокирован. В частности, на шаге 422 запрос крутящего момента ВОМ, полученный во время ускорения автомобиля и/или во время разблокированного состояния гидротрансформатора, может использоваться как входные данные для контроллера заданной частоты вращения двигателя (Ne), который регулирует профиль частоты вращения двигателя во время уменьшения запроса крутящего момента. Поэтому, во время замедления автомобиля, контроллер двигателя может перейти от регулировки крутящего момента к регулировке частоты вращения двигателя, чтобы обеспечить требуемый крутящий момент ВОМ. На шаге 424, может использоваться контроллер заданной Ne для регулировки профиля частоты вращения двигателя таким образом, чтобы требуемый (полученный) запрос крутящего момента ВОМ мог быть стабильным даже когда уменьшается запрос водителя, уменьшая таким образом вероятность заглоханий двигателя. Регулировка профиля частоты вращения (линейное уменьшение) двигателя содержит назначение коэффициента усиления для одного или более исполнительных механизмов крутящего момента двигателя на основе полученного запроса крутящего момента ВОМ для линейного уменьшения частоты вращения двигателя при более медленном темпе в соответствии с уменьшением запроса водителя, когда увеличивается полученный запрос крутящего момента ВОМ. Контроллер заданной Ne может содержать ПИД-контроллер.
На шаге 426, может использоваться ПИД-контроллер для назначения коэффициентов усиления для того, чтобы регулировать одно или более из положения дросселя, момента зажигания, и графика подачи топлива, чтобы удовлетворить запросам крутящего момента ВОМ и крутящего момента гидротрансформатора. Заданная частота вращения (заданная Ne) для ПИД-контроллера может быть откалибрована на основе параметров, таких как вход трансмиссии, скорость автомобиля, изменение запроса водителя, и т.д. с учетом настоящей нагрузки ВОМ. Путем использования контроллера заданной Ne во время событий замедления, частота вращения двигателя может уменьшаться при более медленном темпе и достаточный крутящий момент двигателя может продолжать подаваться в устройство ВОМ. Поэтому, во время работы устройства ВОМ под нагрузкой, переход от фазы ускорения к фазе замедления автомобиля может происходить плавно, не вызывая заглоханий двигателя. После уменьшения частоты вращения двигателя в соответствии с уменьшенным запросом крутящего момента, контроллер заданной Ne может поддерживать частоту вращения на холостом ходу, при которой может вырабатываться достаточный крутящий момент для работы устройства ВОМ и с которой можно возобновить работу автомобиля, если увеличится запрос водителя.
На шаге 428, процедура содержит определение того, завершилась ли фаза замедления. На этом шаге, процедура может также содержать определение того, был ли разблокирован гидротрансформатор. Если определяется, что автомобиль продолжает замедляться и/или гидротрансформатор находится в заблокированном состоянии, на шаге 430 контроллер заданной Ne может продолжать регулировать частоту вращения двигателя и, следовательно, крутящий момент двигателя для поддержания крутящего момента ВОМ, даже когда запрос крутящего момента цепи привода уменьшается. Если определяется, что автомобиль больше не замедляется и/или гидротрансформатор был разблокирован, на шаге 432 процедура содержит определение того, был ли выключен оператором мобильный режим ВОМ, приостанавливая таким образом использование устройства ВОМ. Если определяется, что мобильный режим ВОМ не был выключен, процедура может перейти к шагу 430, на котором могут регулировать частоту вращения двигателя и/или крутящий момент двигателя для подачи оптимального крутящего момента ВОМ, обеспечивая при этом требуемый запрос крутящего момента цепи привода.
Следует понимать, что каждый раз, когда автомобиль ускоряется, контроллер может работать итеративно для повторного нахождения нагрузки ВОМ во время события ускорения чтобы отрегулировать крутящий момент двигателя с учетом повторно найденной нагрузки ВОМ во время последующего перехода между состояниями двигателя. Например, контроллер может начать с самой последней повторно найденной оценки крутящего момента ВОМ и обновлять оценку для каждого события ускорения автомобиля. Контроллер может затем использовать обновленную нагрузку ВОМ для регулировки профиля уменьшения частоты вращения двигателя во время последующего события замедления автомобиля.
Если определяется, что мобильный режим ВОМ был приостановлен, на шаге 434 двигатель может работать без нагрузки ВОМ. Каждое из положения дросселя, момента зажигания, и графика подачи топлива может регулироваться на основе запроса крутящего момента цепи привода и может больше не зависеть от нагрузки ВОМ.
Таким образом, устройство ВОМ, соединенное с двигателем автомобиля, может беспрепятственно работать через двигатель во время движения автомобиля и при изменении запроса водителя. Во время повышения запроса водителя/события нажатия педали акселератора, можно находить запрос крутящего момента ВОМ на основе выходного крутящего момента двигателя относительно крутящего момента на ведущем валу трансмиссии; и во время последующего уменьшения запроса водителя/события отпускания педали акселератора, выходной крутящий момент двигателя может регулироваться на основе уменьшения запроса водителя и дополнительно на основе запроса крутящего момента ВОМ. Таким образом, оцененный крутящий момент ВОМ может гибко регулироваться, так как он изменяется во время события замедления, и контроллер заданной Ne может обновляться в реальном времени.
На фиг. 5 показана примерная последовательность 500 работы, иллюстрирующая примерную работу устройства вала отбора мощности (ВОМ) при различных условиях работы автомобиля. Устройство ВОМ может быть соединено с двигателем автомобиля и может работать с использованием крутящего момента двигателя. Горизонтальная ось (ось x) обозначает время, а вертикальные маркеры t1-t7 определяют значимые моменты времени в работе автомобиля и устройства ВОМ.
Первый график, линия 502, показывает изменение положения педали акселератора в зависимости от времени. Второй график, линия 504, показывает изменение профиля скорости автомобиля в зависимости от времени. Третий график, линия 506, показывает режим работы устройства ВОМ. Оператор может использовать переключатель активации режима ВОМ для выбора одного из статического режима ВОМ, в котором устройство ВОМ работает, когда автомобиль неподвижен, и мобильного режима ВОМ, в котором устройство ВОМ работает, когда автомобиль находится в движении (приводится в движение с использованием крутящего момента двигателя). Четвертый график, линия 508, показывает изменение профиля частоты вращения двигателя в зависимости от времени. Пунктирная линия 509 показывает изменение частоты вращения двигателя во время замедления автомобиля, когда заданная частота вращения двигателя (Ne) не используется для регулирования частоты вращения. Пятый график, линия 510, показывает изменения запроса крутящего момента устройства ВОМ во время работы устройства ВОМ. Шестой график, линия 512, показывает изменение выходного крутящего момента гидротрансформатора на основе рабочих условий автомобиля. Седьмой график, линия 514, показывает полный выходной крутящий момент двигателя, соответствующий работе автомобиля и работе устройства ВОМ. Выходной крутящий момент двигателя является функцией от запроса крутящего момента устройства ВОМ и выходного крутящего момента гидротрансформатора. Пунктирная линия 515 показывает изменение выходного крутящего момента двигателя во время замедления автомобиля, когда заданная частота вращения двигателя (Ne) не используется для регулирования частоты вращения двигателя.
До момента времени t1, автомобиль работает без нагрузки ВОМ. Поэтому переключатель активации режима ВОМ может находиться в выключенном положении. Автомобиль находится в движении и каждое из скорости автомобиля и частоты вращения двигателя регулируется контроллером на основе запроса оператора (как предполагается из положения педали акселератора). Во это время, выходной крутящий момент двигателя может быть прямо пропорционален выходному крутящему моменту гидротрансформатора, поскольку весь крутящий момент двигателя подается в цепь привода для приведения автомобиля в движение.
В момент времени t1, оператор замедляет, а затем останавливает автомобиль из состояния движения. Следовательно, скорость автомобиля, выходной крутящий момент двигателя и крутящий момент гидротрансформатора снижаются до нуля, а частота вращения двигателя уменьшается до частоты вращения холостого хода. Между моментами времени t1 и t2, автомобиль поддерживают в неподвижном состоянии без работы какого-либо устройства ВОМ.
В момент времени t2, оператор может активировать работу устройства ВОМ, приводя в действие переключатель работы ВОМ в положение в первое положение статического режима, и тем самым инициируя статический режим работы ВОМ. В статическом режиме ВОМ, выходной крутящий момент двигателя может использоваться для работы устройства ВОМ, а не для приведения автомобиля в движение. Между моментами времени t2 и t3, устройство ВОМ продолжает работать в статическом режиме и для того, чтобы подавать оптимальный крутящий момент ВОМ, частоту вращения двигателя поддерживают на заданной частоте вращения холостого хода с помощью регулировок одного или более из положения дросселя, графика подачи топлива и момента зажигания. В это время, автомобиль продолжает оставаться неподвижным, то есть работает при нулевой скорости автомобиля.
В момент времени t3, оператор может изменять положение педали акселератора и может иметь место событие нажатия педали акселератора. Статический режим может работать только при условиях, когда автомобиль находится в нейтральном или парковочном положении передачи, ручной тормоз активирован, к педали акселератора не прикасаются, скорость автомобиля равна нулю, и к тормозной педали не прикасаются. В соответствии с нажатием педали акселератора, автомобиль может начать движение и статический режим может быть завершен. В это время, статический режим отключается без активного запроса оператора на отключение этого режима путем перемещения переключателя ВОМ из первого положения статического режима. Как только автомобиль задвигается, устройство ВОМ больше не может работать в статическом режиме ВОМ, и поэтому статический режим ВОМ может быть завершен.
Между моментами времени t3 и t4, для того, чтобы привести автомобиль в движение, положение педали может изменяться оператором и, следовательно, могут быть изменения частоты вращения двигателя, выходного крутящего момента двигателя, крутящего момента гидротрансформатора и скорости автомобиля. В это время, весь выходной крутящий момент двигателя используется гидротрансформатором, а крутящий момент ВОМ поддерживается на нуле.
В момент времени t4, оператор может активировать переключатель работы ВОМ во второе положение мобильного режима, тем самым инициируя мобильный режим ВОМ. В мобильном режиме ВОМ, выходной крутящий момент двигателя может использоваться для каждого из работы устройства ВОМ и обеспечения крутящего момента цепи привода (в настоящем документе, представленного крутящим моментом гидротрансформатора). В это время, гидротрансформатор может быть разблокирован и автомобиль может работать на более низкой скорости. Между моментами времени t4 и t5, частоту вращения двигателя постоянно регулируется оператором посредством регулировки положения педали акселератора, чтобы увеличить частоту вращения двигателя таким образом, чтобы можно было создать достаточный крутящий момент двигателя для работы устройства ВОМ и приведения автомобиля в движение. Во время ускорения, могут оценивать нагрузку ВОМ путем вычисления необработанной неотфильтрованной нагрузки ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора, и вычисления отфильтрованной нагрузки ВОМ на основе необработанной нагрузки ВОМ и переменной временной константы, при этом переменная временная константа основана на колебаниях мгновенной нагрузки ВОМ от необработанной нагрузки ВОМ. Во время ускорения автомобиля и установившейся работы автомобиля, упреждающая оценка выходного крутящего момента двигателя может быть обновлена на основе отфильтрованной нагрузки ВОМ, и один или более исполнительных механизмов крутящего момента двигателя (таких как момента зажигания, положения дросселя, и длительности импульса впрыска топлива) могут регулироваться для выдачи упреждающей оценки выходного крутящего момента двигателя.
В момент времени t5, автомобиль может начать замедление (отпускание педали акселератора) и оператор больше не может регулировать положение педали для обеспечения достаточного крутящего момента, требуемого для работы ВОМ. Во время перехода между состояниями двигателя, например, во время события замедления, когда уменьшается запрос крутящего момента двигателя, запрос крутящего запроса ВОМ, полученный во время ускорения автомобиля, может использоваться для регулирования профиля частоты вращения двигателя и выходного крутящего момента двигателя. В соответствии с замедлением, между моментами времени t5 и t6, контроллер использует отфильтрованный запрос крутящего момента ВОМ, полученный во время ускорения автомобиля (между моментами времени t4 и t5) в качестве входного значения для контроллера заданной частоты вращения двигателя (Ne), который регулирует профиль частоты вращения двигателя таким образом, чтобы крутящий момент, требуемый устройством ВОМ, продолжал подаваться даже когда прекращается запрос водителя. Может использоваться пропорционально-интегрально-дифференциальное (ПИД) регулирование для управления скоростью снижения частоты вращения двигателя во время события торможения. ПИД-контроллер может назначать коэффициенты усиления для регулировки одного или более из положения дросселя, графика подачи топлива и момента зажигания в соответствии с частотой вращения двигателя и отфильтрованной нагрузки ВОМ с помощью контроллера заданной Ne для поддержания выходного крутящего момента двигателя (на колесе) на требуемом уровне, когда изменяется запрос водителя. Требуемая (заданная) частота вращения двигателя может быть откалибрована на основе ввода от трансмиссии, а также таких факторов, как скорость автомобиля. В это время, выходной крутящий момент гидротрансформатора уменьшается с большей скоростью, а выходной крутящий момента двигателя может использоваться в основном для работы ВОМ. В одном из примеров, если бы контроллер заданной Ne не использовался для регулирования частоты вращения двигателя во время замедления автомобиля, частота вращения двигателя могла бы уменьшиться с большей скоростью, как показано пунктирной линией 509, приводя к более низкому выходному крутящему моменту двигателя (как показано пунктирной линией 515). Из-за более высокой, чем требуется, скорости падения частоты вращения двигателя, при работе устройства ВОМ, могут быть потенциальные заглохания двигателя во время переходов двигателя с фазы ускорения на фазу замедления.
В момент времени t6, автомобиль может начать ускорение снова (нажатие педали акселератора) и скорость автомобиля увеличивается. Следовательно, между моментами времени t6 и t7, частота вращения двигателя может регулироваться оператором через регулировку положения педали акселератора для того, чтобы обеспечить достаточный крутящий момент как для работы устройства ВОМ, так и для движения автомобиля. Отфильтрованный запрос крутящего момента ВОМ может использоваться упреждающей системой управления для регулировок частоты вращения двигателя и выходного крутящего момента двигателя. В это время, крутящий момент двигателя используется как для работы ВОМ, так и для запроса крутящего момента гидротрансформатора.
В момент времени t7, оператор может завершить мобильный режим ВОМ с помощью переключателя работы ВОМ. В соответствии с завершением мобильного режима ВОМ, крутящий момент двигателя больше не может использоваться для работы устройства ВОМ. В это время, крутящий момент ВОМ может снижаться до нуля. Положение педали может регулироваться для регулирования частоты вращения двигателя и обеспечения достаточного выходного крутящего момента двигателя, который может использоваться в основном гидротрансформатором для движения автомобиля. Таким образом, устройство ВОМ может работать при различных условиях движения автомобиля, которые содержат как стационарные, так и мобильные условия с уменьшенной вероятностью заглоханий и дерганий двигателя.
На фиг. 6 показана примерная схема 600 управления, которая может использоваться контроллером автомобиля, таким как контроллер заданной частоты вращения двигателя (Ne) для регулирования частоты вращения двигателя через регулировки положения дросселя, момента зажигания, и впрыска топлива во время работы устройства вала отбора мощности (ВОМ), соединенного с двигателем автомобиля. Схема 600 управления может использоваться для регулирования частоты вращения двигателя во время работы устройства ВОМ в мобильном режиме, в котором автомобиль находится в движении и крутящий момент двигателя подается одновременно на гидротрансформатор и на устройство ВОМ. В настоящем раскрытии, сигнал может относиться к электрическому сигналу, такому как электрический ток, а модификация сигнала может относиться к изменению напряжения, соответствующего электрическому току.
Контроллер 614 может получать оценку 612 крутящего момента двигателя (Tqe_est), полученную с помощью датчика частоты вращения коленчатого вала в качестве первого входного параметра. Сигнал 602 частоты вращения двигателя (Ne) может быть дифференцирован с помощью дифференциатора 606 (DT), а дифференцированный сигнал 608 может быть затем интегрирован интегратором 609. Выходной сигнал 610 интегратора 609 может использоваться в качестве второго входного параметра для контроллера 614. Паразитные потери 622 крутящего момента (Tq_loss) из-за работы таких компонентов как охладительные насосы, маслонасосы двигателя, и т.д., могут использоваться в качестве первого входного параметра, а входной крутящий момент 624 гидротрансформатора (Tq_tc), оцененный с помощью датчика частоты вращения ведущего вала трансмиссии, может использоваться как второй входной параметр для сумматора 626. Выходной сигнал 628 сумматора 626 может указывать крутящий момент двигателя, используемый для работы автомобиля, не принимая во внимание запрос крутящего момента устройства ВОМ. Выходной сигнал 628 может использоваться как третий входной параметр для контроллера 614. На контроллере 614, сигналы 610 и 628 могут быть вычтены из сигнала 612 оценки крутящего момента двигателя.
Выходной сигнал 616 контроллера 614 представляет оценку необработанного неотфильтрованного запроса крутящего момента ВОМ. Сигнал 616 может использоваться в качестве входного параметра для низкочастотного фильтра 618. На фильтре 618, для оценки отфильтрованной нагрузки ВОМ может использоваться временная константа, рассчитанная на основе необработанной нагрузки ВОМ и колебаний необработанной нагрузки ВОМ. Выход фильтра, отфильтрованная нагрузка 618 ВОМ (Tq_PTO) может использоваться в качестве первого входного параметра для сумматора 632. Выходной сигнал сумматора 626 указывающий крутящий момент двигателя, используемый для работы автомобиля (не содержащий запрос крутящего момента ВОМ), может использоваться в качестве второго входного параметра 630 для сумматора 632. Выходной сигнал 667 сумматора 632 может соответствовать полному крутящему моменту двигателя, используемому для каждого из работы автомобиля и работы ВОМ.
Вычитатель 638 может получать оценку 634 требуемого крутящего момента двигателя (Ne_desired), оцененную на основе текущих рабочих условий автомобиля, запроса водителя, и запроса крутящего момента ВОМ в качестве первого входного параметра. Оценка 636 текущей частоты вращения двигателя (Ne_measured), полученная с помощью датчика частоты вращения коленчатого вала, может использоваться второго входного параметра для вычитателя 638. Вычитатель 638 может вычислить разность (Ne_error) между требуемой частотой вращения двигателя и оцененной частотой вращения двигателя и выдать выходные сигналы 640, 648, и 656, которые направляются в разные участки ПИД-контроллера. Сигналы 640, 648, и 656 могут обрабатываться и/или модифицироваться отдельно пропорциональным коэффициентом 642 усиления (Kр), блоком 650 интегратора с интегральным коэффициентом 652 усиления (Ki) и блоком 658 дифференциатора (DT1) с дифференциальным коэффициентом 660 усиления (Kd), соответственно.
Сигнал 640, после модификации пропорциональным коэффициентом 642 усиления (Kр), может выдавать пропорциональный член 644. Параллельно, сигнал 648 может быть интегрирован блоком 650 интегратора (I1) и интегральным коэффициентом 652 усиления (Ki) и может быть образован интегральный член 654. Кроме того, сигнал 656 может быть дифференцирован блоком 658 дифференциатора (DT1) и дифференциальным коэффициентом 660 усиления (Kd) и может быть образован дифференциальный член 662. Каждый из пропорционального члена 644, интегрального члена 654, и дифференциального члена 662 может использоваться в качестве входных сигналов для сумматора 646. На основе входных сигналов, сумматор 646 может вычислять рекурсивную оценку 668 крутящего момента (Тq_fb). Эта рекурсивная оценка 664 крутящего момента может использоваться в качестве входного сигнала для вычитателя 666, в котором рекурсивная оценка 664 крутящего момента может быть вычтена из входного сигнала 667, соответствующего полному крутящему моменту, используемому для работы автомобиля и ВОМ.
Выходной сигнал 668 вычитателя может представлять крутящий момент, который должен быть задан (Tq_com) для обеспечения требуемой частоты вращения двигателя. Сигнал 668 крутящего момента, который должен быть задан, может использоваться в качестве входа в нелинейную диаграмму 670 (справочная таблица). Первый сигнал 669 (коэффициент усиления), оцененный по нелинейной диаграмме 670, может быть использован для соответственной регулировки положения впускного дросселя, второй сигнал 670 (коэффициент усиления), оцененный по нелинейной диаграмме 670, может быть использован для регулировки сигнала момента зажигания, а третий сигнал 671 (коэффициент усиления), оцененный по нелинейной диаграмме 670, может быть использован для регулировки впрыска топлива.
Сигнал 669 может соответствовать сигналу, подаваемому на исполнительный механизм, соединенный с дросселем заслонкой для определения степени открытия впускного дросселя. Сигнал 670 может соответствовать сигналу, подаваемому на исполнительный механизм, соединенный со свечой зажигания для регулировки момента зажигания. Сигнал 671 может соответствовать сигналу, подаваемому на исполнительный механизм, соединенный с топливными инжекторами, для регулировки графика подачи топлива, например, путем изменения ширины импульса впрыска топлива или рабочего цикла. Чем выше запрос крутящего момента ВОМ, тем быстрее могут быть назначены коэффициенты усиления. В одном из примеров, когда отфильтрованный запрос крутящего момента ВОМ увеличивается, может увеличиваться открытие дросселя, и ширина импульса впрыска может увеличиваться для регулировки выходного крутящего момента двигателя, требуемого для оптимальной работы ВОМ и работы автомобиля. В другом примере, если наблюдается значительное снижение отфильтрованного запроса крутящего момента ВОМ, может замедляться момент зажигания. Кроме того, могут регулироваться подача топлива и/или воздуха для уменьшения требуемого выходного крутящего момента двигателя.
В качестве примера, когда автомобиль ускоряется, сигналы Tq_pto, Tq_tc, and Tq_loss могут вычисляться непрерывно и использоваться непосредственно для управления частотой вращения двигателя и крутящим моментом двигателя посредством регулировок каждого из положения дросселя, момента зажигания, и графика впрыска топлива двигателя. Во время перехода от ускорения автомобиля к замедлению автомобиля, запрос крутящего момента гидротрансформатора может сокращаться до нуля, а запрос (Tq_pto) крутящего момента ВОМ, найденный во время ускорения автомобиля, может использоваться как вход (сигнал 620) для сумматора 632. Затем, могут назначаться коэффициенты усиления для регулировок положения дросселя, момента зажигания, и графика впрыска топлива таким образом, что уменьшение частоты вращения двигателя может выполняться с меньшей скоростью, а заданная частота вращения холостого хода может быть достаточной для генерирования крутящего момента, запрашиваемого для работы устройства ВОМ. В одном из примеров, заданная частота вращения холостого хода во время работы ВОМ в мобильном режиме может быть выше, чем частота вращения холостого хода двигателя во время работы автомобиля без нагрузки ВОМ. Таким образом, может использоваться ПИД-контроллер для регулировки частоты вращения двигателя и выходного крутящего момента двигателя на основе запроса крутящего момента устройства ВОМ во время ускорения и замедления автомобиля.
Во время ускорения автомобиля, необработанный неотфильтрованный запрос крутящего момента устройства ВОМ может быть оценен на основе выходного крутящего момента двигателя и выходного крутящего момента гидротрансформатора, а отфильтрованный запрос крутящего момента устройства ВОМ может быть вычислен на основе выходного крутящего момента двигателя, выходного крутящего момента гидротрансформатора, и колебаний необработанного запроса крутящего момента устройства ВОМ; а во время перехода между состояниями двигателя, например во время замедления автомобиля, контроллер заданной частоты вращения двигателя (Ne) может использоваться для регулировки (управления) профиля частоты вращения двигателя и выходного крутящего момента двигателя на основе отфильтрованного запроса крутящего момента ВОМ, оцененного во время ускорения автомобиля. Таким образом, автомобиль движется как во время оценивания нагрузки ВОМ (запроса крутящего момента), так и вовремя перехода между состояниями двигателя, и причем регулировка происходит после этого оценивания.
Один из примерных способов содержит способ для автомобиля с устройством вала отбора мощности (ВОМ), соединенным с двигателем, в котором: оценивают нагрузку ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора; и регулируют выходной крутящий момент двигателя на основе оцененной нагрузки ВОМ во время перехода между состояниями двигателя. В предыдущем примере, дополнительно или опционально, автомобиль движется как во время оценивания нагрузки ВОМ, так и вовремя перехода между состояниями двигателя, и причем регулировка происходит после этого оценивания, и причем трансмиссия присоединена за двигателем в цепи привода через гидротрансформатор. В любом или во всех предыдущих примерах, дополнительно или опционально, нахождение содержит нахождение нагрузки ВОМ во время ускорения автомобиля или во время установившегося движения, и причем использование результата нахождения во время перехода содержит использование результата нахождения во время уменьшения запроса крутящего момента двигателя в соответствии с замедлением автомобиля. В любом или во всех предыдущих примерах, дополнительно или опционально, гидротрансформатор соединяет двигатель с трансмиссией, причем выходной крутящий момент двигателя основан на выходном сигнале датчика частоты вращения коленчатого вала, и причем выходной крутящий момент гидротрансформатора основан на выходном сигнале датчика частоты вращения ведущего вала трансмиссии. В любом или во всех предыдущих примерах, дополнительно или опционально, нахождение нагрузки ВОМ на основе разности содержит вычисление необработанной неотфильтрованной нагрузки ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора, и вычисление отфильтрованной нагрузки ВОМ на основе необработанной неотфильтрованной нагрузки ВОМ и переменной временной константы. В любом или во всех предыдущих примерах, дополнительно или опционально, использование результата нахождения во время перехода между состояниями двигателя содержит регулировку профиля частоты вращения двигателя во время замедления автомобиля на основе уменьшения запроса крутящего момента во время замедления автомобиля и дополнительно на основе отфильтрованной нагрузки ВОМ. В любом или во всех предыдущих примерах, дополнительно или опционально, регулировка профиля частоты вращения двигателя содержит использование каждого из отфильтрованной нагрузки ВОМ и уменьшения запроса крутящего момента во время замедления автомобиля в качестве входов для контроллера заданной частоты вращения двигателя, причем контроллер заданной частоты вращения двигателя является пропорционально-интегрально-дифференциальным (ПИД) контроллером. Любой или все предыдущие примеры дополнительно содержит, дополнительно или опционально, во время ускорения автомобиля или устойчивой работы автомобиля, обновление упреждающей оценки выходного крутящего момента двигателя на основе отфильтрованной нагрузки ВОМ, и регулировку одного или более исполнительных механизмов крутящего момента двигателя для обеспечения упреждающей оценки выходного крутящего момента двигателя, причем один или более исполнительных механизмов крутящего момента двигателя содержат момент зажигания, положение дросселя и ширину импульса впрыска топлива.
Другой примерный способ для двигателя автомобиля, соединенного с устройством вала отбора мощности (ВОМ), содержит работу устройства ВОМ посредством двигателя при движении автомобиля и изменениях запроса водителя. В предыдущем примере, дополнительно или опционально, при указанной работе: во время события увеличения запроса водителя/нажатия на педаль акселератора, оценивают запрос крутящего момента ВОМ на основе выходного крутящего момента двигателя относительно крутящего момента на ведущем валу трансмиссии; и во время последующего события уменьшения запроса водителя/отпускания педали акселератора, регулируют выходной крутящий момент двигателя на основе уменьшения запроса водителя и дополнительно на основе запроса крутящего момента ВОМ. В любом или во всех предыдущих примерах, дополнительно или опционально, при указанной регулировке регулируют профиль частоты вращения (линейного уменьшения) двигателя для поддержания оцененного запроса крутящего момента ВОМ при уменьшении запроса водителя. В любом или во всех предыдущих примерах, дополнительно или опционально, при регулировке профиля частоты вращения (линейного уменьшения) двигателя, назначают коэффициент усиления для одного или более исполнительных механизмов крутящего момента двигателя на основе оцененного запроса крутящего момента ВОМ для линейного уменьшения частоты вращения двигателя с меньшей скоростью в соответствии с уменьшением запроса водителя, в то время, когда растет оцененный запрос крутящего момента ВОМ. В любом или во всех предыдущих примерах, дополнительно или опционально, запрос крутящего момента ВОМ, основанный на выходном крутящем моменте двигателя относительно крутящего момента на ведущем валу трансмиссии, является необработанным неотфильтрованным запросом крутящего момента ВОМ, и причем, при выполнении указанной оценки, отфильтровывают необработанный неотфильтрованный запрос крутящего момента ВОМ с использованием переменной временной константы, причем эта переменная временная константа основана на колебаниях мгновенной нагрузки ВОМ от необработанной неотфильтрованной нагрузки ВОМ во время увеличения запроса водителя. В любом или во всех предыдущих примерах, дополнительно или опционально, при отфильтровывании используют переменную временную константу, причем эта переменная временная константа основана на отклонениях предполагаемой нагрузки ВОМ от отфильтрованной нагрузки ВОМ во время увеличения запроса водителя.
Еще один примерный способ содержит, что в нем в соответствии с первым изменением запроса водителя, полученным при работе устройства ВОМ посредством двигателя в первом режиме прекращают работу устройства ВОМ посредством двигателя; и в соответствии со вторым изменением запроса водителя, полученным при работе устройства ВОМ посредством двигателя во втором режиме регулируют работу двигателя для соответствия изменению запроса водителя при поддержании работы устройства ВОМ. В предыдущем примере, дополнительно или опционально, двигатель соединен с автомобилем, и при работе устройства ВОМ в первом режиме, автомобиль неподвижен, а при работе устройства ВОМ во втором режиме, автомобиль движется и гидротрансформатор, присоединенный между двигателем и колесами автомобиля, разблокирован. В любом или во всех предыдущих примерах, дополнительно или опционально, при работе устройства ВОМ посредством двигателя в первом режиме устанавливают заданную частоту вращения холостого хода двигателя на основе нагрузки ВОМ, и регулируют работу двигателя для поддержания указанной заданной частоты вращения холостого хода двигателя; и причем при работе устройства ВОМ посредством двигателя во втором режиме регулируют работу двигателя на основе нагрузки ВОМ для поддержания крутящего момента на колесе при изменении запроса водителя. В любом или во всех предыдущих примерах, дополнительно или опционально, первое изменение запроса водителя содержит увеличение запроса водителя, и причем второе изменение запроса водителя содержит увеличение или уменьшение запроса водителя. Любой или все предыдущие примеры дополнительно содержит, дополнительно или опционально, что, когда второе изменение запроса водителя является увеличением запроса водителя, находят нагрузку ВОМ на двигатель на основе выходного крутящего момента двигателя относительно выходного крутящего момента гидротрансформатора, и причем, когда второе изменение запроса водителя является уменьшением запроса водителя, используют найденную нагрузку ВОМ для регулировки выходного крутящего момента двигателя. В любом или во всех предыдущих примерах, дополнительно или опционально, при нахождении нагрузки ВОМ, оценивают необработанную неотфильтрованную нагрузку ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора, и дополнительно оценивают отфильтрованную нагрузку ВОМ на основе изменения необработанной неотфильтрованной нагрузки ВОМ в течение интервала времени, причем работу двигателя регулируют на основе отфильтрованной нагрузки ВОМ. Любой или все предыдущие примеры дополнительно содержит, дополнительно или опционально, что, при работе во втором режиме, назначают коэффициенты усиления для регулировки одного или более из положения дросселя, графика подачи топлива и момента зажигания в соответствии с частотой вращения двигателя и отфильтрованной нагрузкой ВОМ посредством контроллера заданной частоты вращения для поддержания крутящего момента на колесе при изменениях запроса водителя.
В дополнительном представлении, система автомобиля содержит двигатель; датчик частоты вращения коленчатого вала; устройство вала отбора мощности (ВОМ), соединенное с двигателем; первый и второй переключатель ВОМ; гидротрансформатор, соединяющий двигатель с системой трансмиссии; датчик частоты вращения ведущего вала трансмиссии, и контроллер с машиночитаемыми инструкциями, хранящимися в долговременной памяти для следующих действий: в соответствии с приведением в действие первого переключателя ВОМ, инициируют первый статический режим работы устройства ВОМ, при котором автомобиль находится в неподвижном положении и запрос крутящего момента ВОМ удовлетворяют с использованием крутящего момента двигателя, и в соответствии с приведением в действие второго переключателя ВОМ, инициируют второй мобильный режим работы устройства ВОМ, при котором автомобиль находится в движении и каждое из запроса крутящего момента ВОМ и крутящего момента на колесе выполняют с использованием крутящего момента двигателя, когда изменяется запрос водителя. В предыдущем примере, дополнительно или опционально, работа устройства ВОМ во втором режиме содержит, что во время ускорения автомобиля: оценивают выходной крутящий момент двигателя через датчик частоты вращения коленчатого вала, оценивают выходной крутящий момент гидротрансформатора через датчик частоты вращения ведущего вала трансмиссии, оценивают необработанный неотфильтрованный запрос крутящего момента ВОМ и отфильтрованный запрос крутящего момента ВОМ на основе выходного крутящего момента двигателя, выходного крутящего момента гидротрансформатора, и колебаний необработанного неотфильтрованного запроса крутящего момента устройства ВОМ; а во время замедления автомобиля, используют контроллер заданной частоты вращения двигателя (Ne) для регулирования профиля частоты вращения двигателя и выходного крутящего момента двигателя на основе отфильтрованного запроса крутящего момента ВОМ, оцененного во время ускорения автомобиля. В любом или во всех предыдущих примерах, дополнительно или опционально, регулирование профиля частоты вращения двигателя и выходного крутящего момента двигателя выполняют через настройки одного или более из положения дросселя, графика подачи топлива и момента зажигания.
Технический эффект от постоянного оценивания запроса крутящего момента ВОМ и изменения запроса крутящего момента ВОМ во время ускорения автомобиля состоит в том, что часть выходного крутящего момента двигателя может быть эффективно использована для работы устройства ВОМ во время фаз ускорения и устойчивого движения, а также во время переходов к фазам замедления. Поэтому, в дополнение к работе устройства ВОМ, когда автомобиль неподвижен, устройство ВОМ может работать во время движения автомобиля. Путем использования контроллера заданной частоты вращения двигателя (Ne) для уменьшения скорости снижения частоты вращения двигателя во время замедления автомобиля, могут быть уменьшены потенциальные заглохания и дерганья двигателя, вызываемые работой устройства ВОМ во время события отпускания педали акселератора. Путем регулировки частоты вращения холостого хода двигателя, работа устройства ВОМ может быть беспрепятственно продолжена во время переходов в работе двигателя. Благодаря возможности использования устройства ВОМ во время как стационарных, так мобильных режимов автомобиля, может быть расширен диапазон использования ВОМ.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых инструкций в долговременной памяти и выполняться системой управления, содержащей контроллер в сочетании с различными датчиками, исполнительными механизмами, и другим оборудованием двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или более из любого количества стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, где указанные действия выполняются путем исполнения инструкций в системе, содержащей различные компоненты оборудования двигателя в сочетании с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, 1-4, 1-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на "один" элемент или "первый" элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов, и/или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СНИЖЕНИЯ ДАВЛЕНИЯ ВО ВПУСКНОМ КОЛЛЕКТОРЕ ДВИГАТЕЛЯ (ВАРИАНТЫ) | 2015 |
|
RU2693369C2 |
| Способ для управления муфтой гидротрансформатора (варианты) | 2017 |
|
RU2680056C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ И УЗЕЛ УПРАВЛЕНИЯ | 2009 |
|
RU2516687C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УЛУЧШЕНИЯ ОТКЛИКА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2703391C2 |
| СПОСОБ РАБОТЫ ТРАНСПОРТНОГО СРЕДСТВА С ГИБРИДНЫМ ПРИВОДОМ (ВАРИАНТЫ) | 2014 |
|
RU2581993C2 |
| Способ и система для замедления транспортного средства | 2017 |
|
RU2717608C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ С СИСТЕМОЙ РЕЦИРКУЛЯЦИИ ОТРАБОТАВШИХ ГАЗОВ (ВАРИАНТЫ) | 2015 |
|
RU2692882C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ПРОДЛЕНИЯ РЕКУПЕРАТИВНОГО ТОРМОЖЕНИЯ | 2014 |
|
RU2674739C2 |
| СПОСОБ ОСТАНОВА ВРАЩЕНИЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ОСТАНОВА ВРАЩЕНИЯ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2643016C2 |
| СПОСОБ ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СИСТЕМА ОСТАНОВА ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2588390C2 |
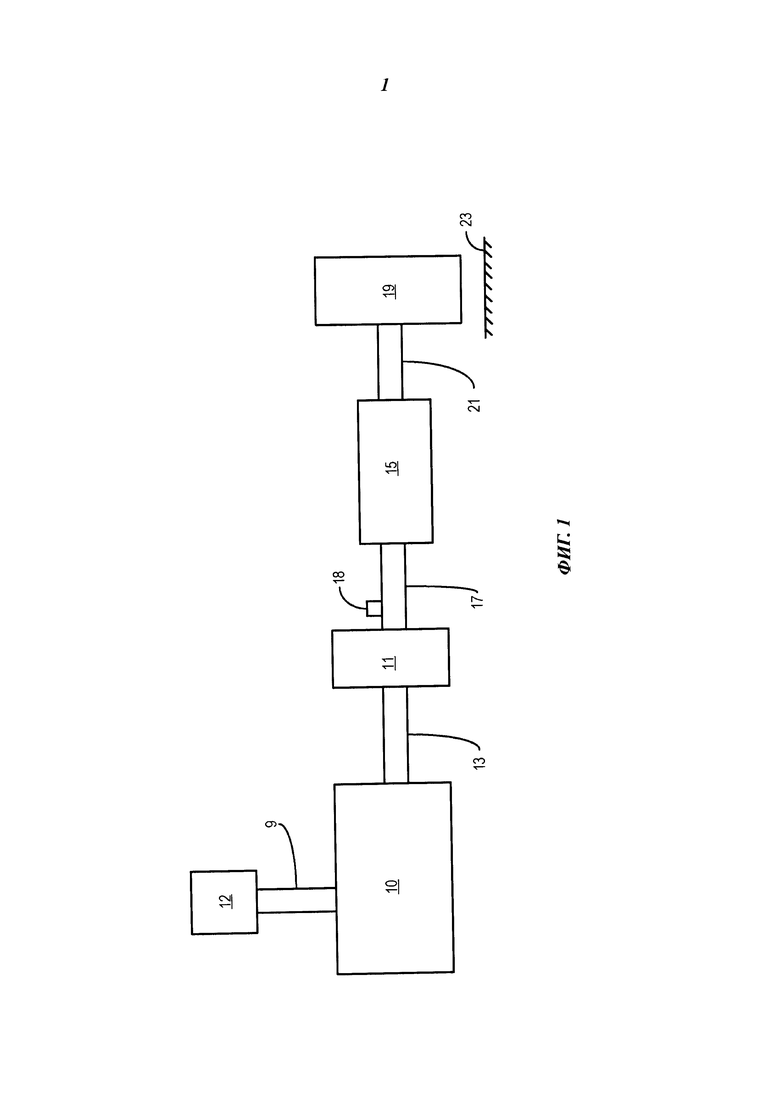
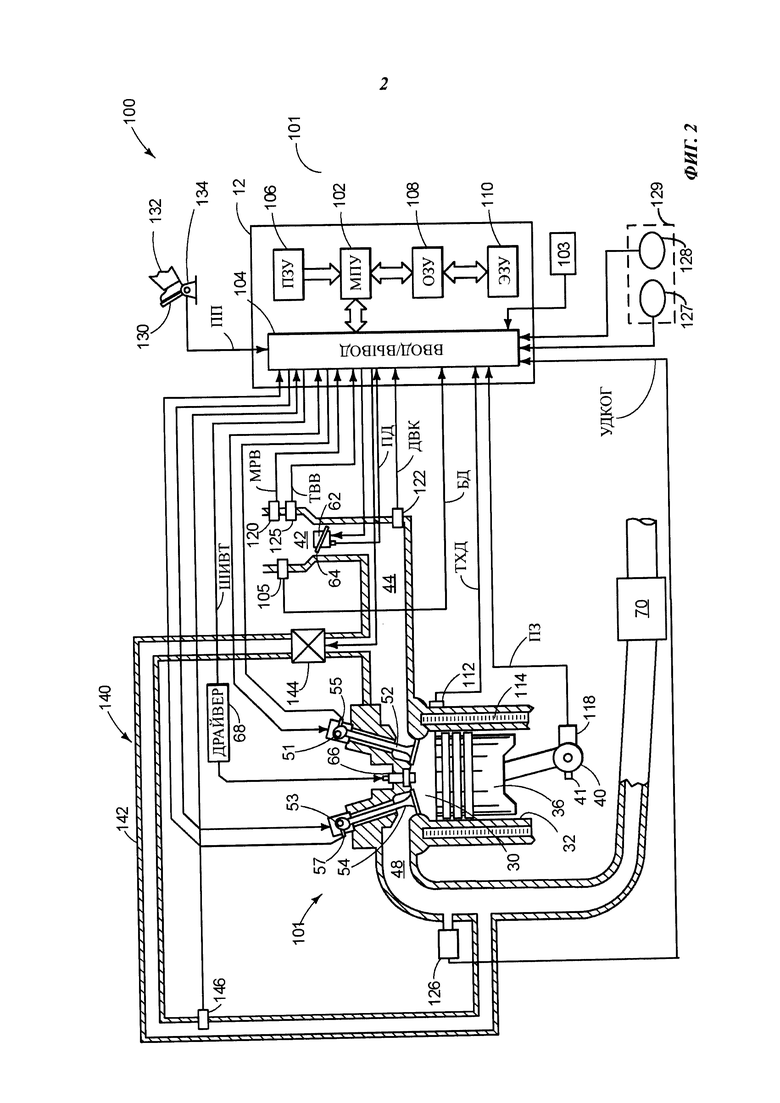
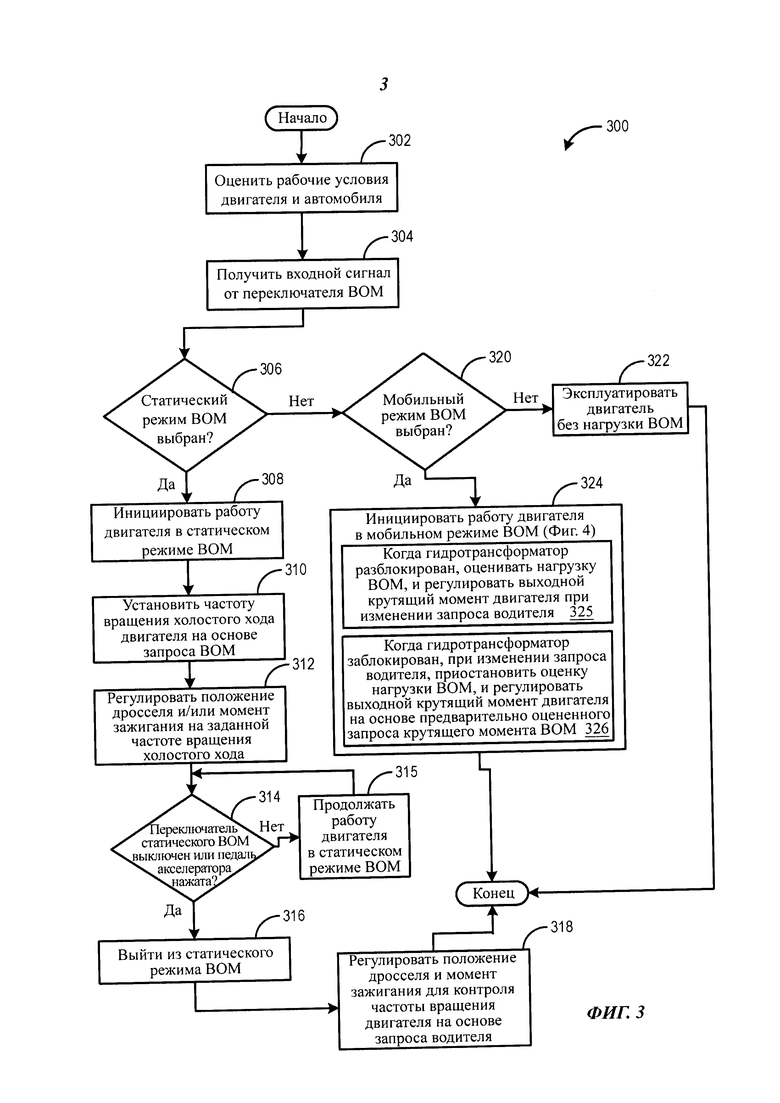
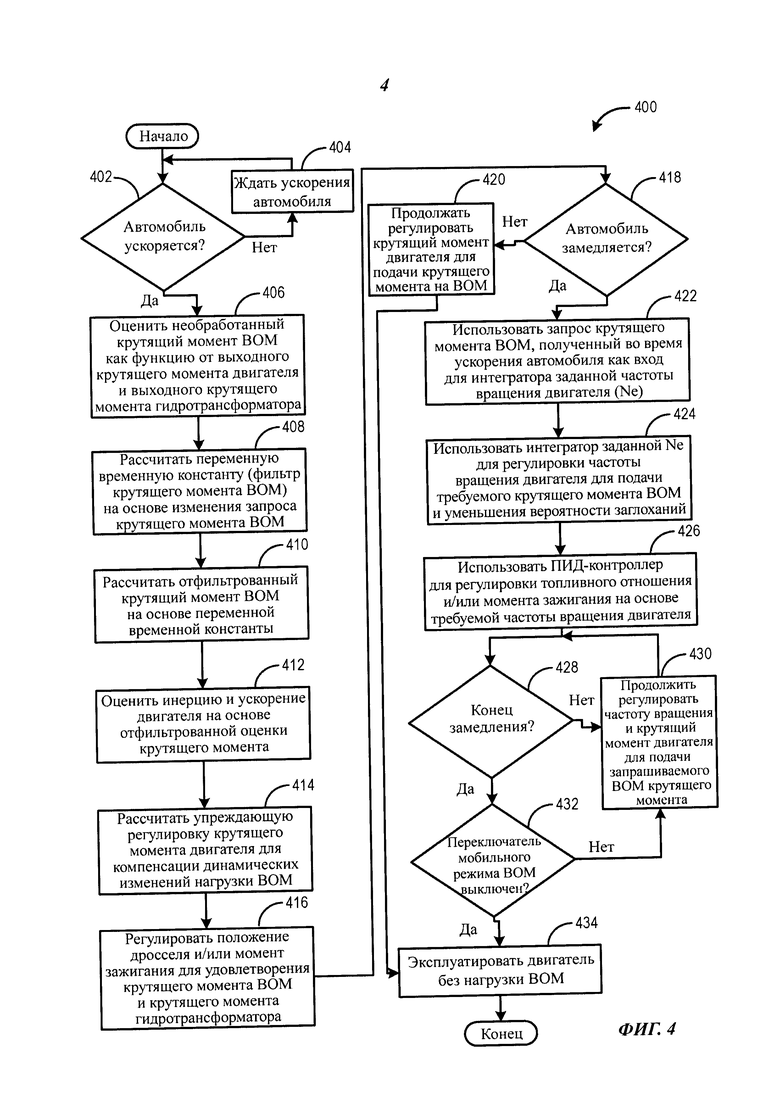
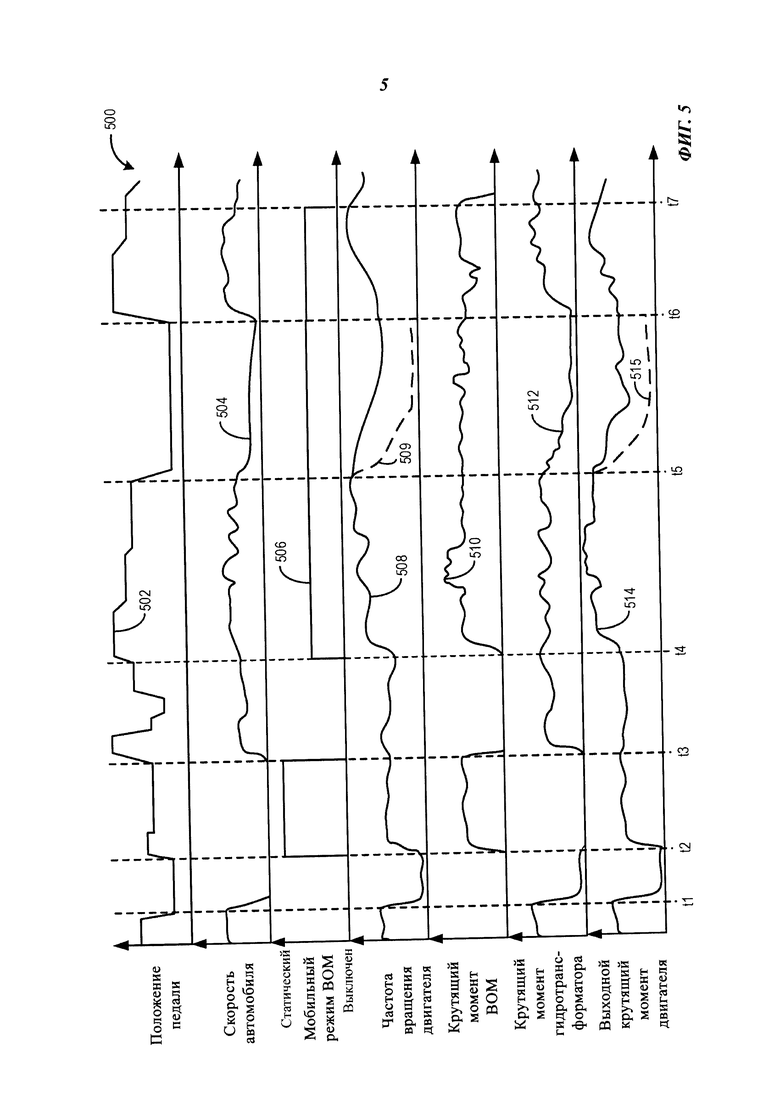
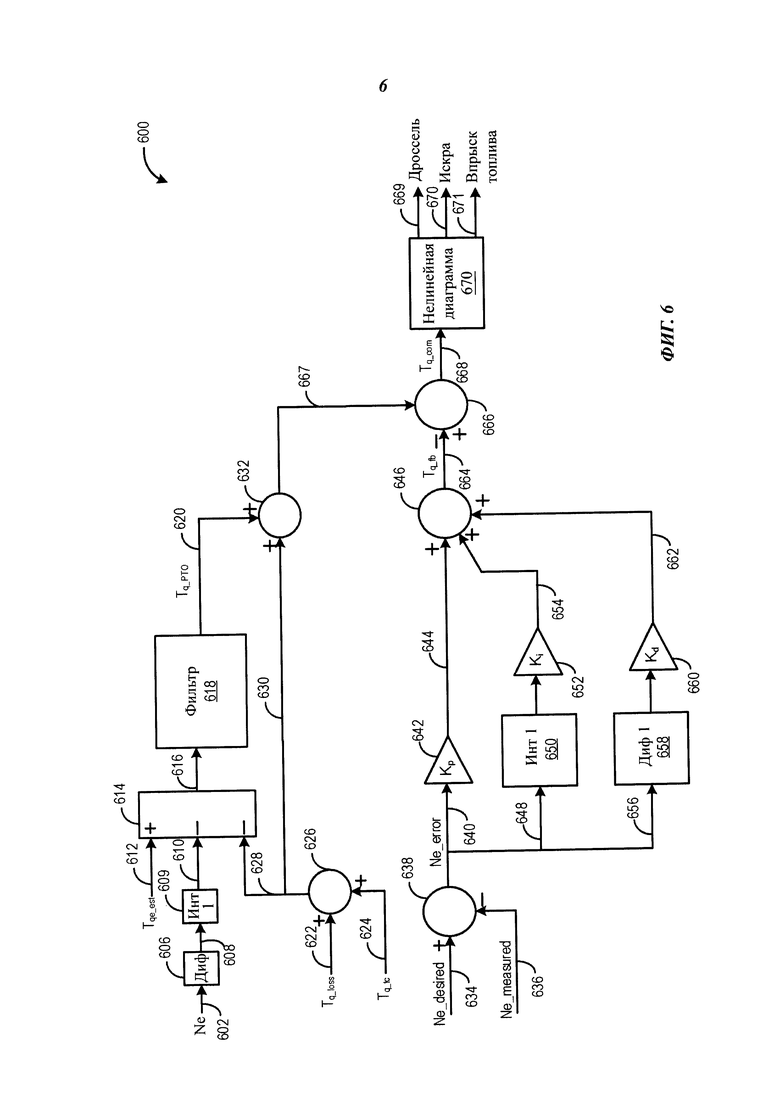
Изобретение относится к способам и системам для управления двигателем автомобиля для подачи требуемого крутящего момента в устройство вала отбора мощности. В одном из примеров представлен способ для автомобиля с устройством вала отбора мощности (ВОМ), соединенным с двигателем, в котором оценивают нагрузку ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора и регулируют выходной крутящий момент двигателя на основе оцененной нагрузки ВОМ во время перехода между состояниями двигателя. Техническим результатом является регулирование крутящего момента. 3 н. и 16 з.п. ф-лы, 6 ил.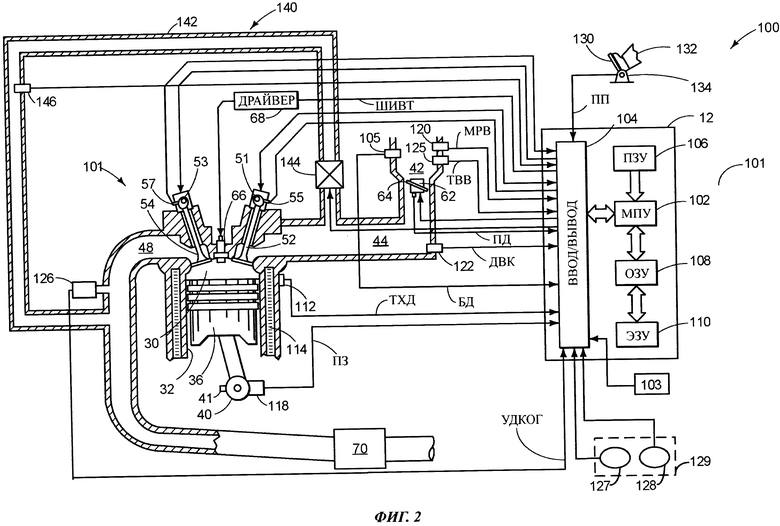
1. Способ для автомобиля с устройством вала отбора мощности (ВОМ), соединенным с двигателем, в котором:
оценивают нагрузку ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора; и
регулируют выходной крутящий момент двигателя на основе оцененной нагрузки ВОМ во время перехода между состояниями двигателя.
2. Способ по п. 1, отличающийся тем, что в нем автомобиль движется как во время оценивания нагрузки ВОМ, так и во время перехода между состояниями двигателя, и причем регулировка происходит после этого оценивания, и причем трансмиссия присоединена за двигателем в цепи привода через гидротрансформатор.
3. Способ по п. 1, отличающийся тем, что при указанной оценке получают нагрузку ВОМ во время ускорения автомобиля или во время установившегося движения, и причем при использовании этой оценки во время перехода используют полученную информацию во время замедления автомобиля.
4. Способ по п. 2, отличающийся тем, что гидротрансформатор соединяет двигатель с трансмиссией, причем выходной крутящий момент двигателя основан на выходном сигнале датчика частоты вращения коленчатого вала, и причем выходной крутящий момент гидротрансформатора основан на выходном сигнале датчика частоты вращения ведущего вала трансмиссии.
5. Способ по п. 1, отличающийся тем, что при оценке нагрузки ВОМ, основанной на разности, вычисляют необработанную неотфильтрованную нагрузку ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора и вычисляют отфильтрованную нагрузку ВОМ на основе необработанной неотфильтрованной нагрузки ВОМ и переменной временной константы.
6. Способ по п. 5, отличающийся тем, что при использовании оценки во время перехода между состояниями двигателя регулируют профиль частоты вращения двигателя во время замедления автомобиля на основе уменьшения запроса крутящего момента во время замедления автомобиля и дополнительно на основе отфильтрованной нагрузки ВОМ.
7. Способ по п. 6, отличающийся тем, что при регулировке профиля частоты вращения двигателя используют каждое из отфильтрованной нагрузки ВОМ и уменьшения запроса крутящего момента во время замедления автомобиля в качестве входов для контроллера заданной частоты вращения двигателя, причем контроллер заданной частоты вращения двигателя является пропорционально-интегрально-дифференциальным (ПИД) контроллером.
8. Способ по п. 5, в котором дополнительно, во время ускорения автомобиля и устойчивой работы автомобиля, обновляют упреждающую оценку выходного крутящего момента двигателя на основе отфильтрованной нагрузки ВОМ и регулируют один или более исполнительных механизмов крутящего момента двигателя для обеспечения упреждающей оценки выходного крутящего момента двигателя, причем один или более исполнительных механизмов крутящего момента двигателя содержат момент зажигания, положение дросселя и ширину импульса впрыска топлива.
9. Способ для двигателя автомобиля, соединенного с устройством вала отбора мощности (ВОМ), в котором:
обеспечивают работу устройства ВОМ посредством двигателя при движении автомобиля и изменениях запроса водителя, при этом при указанной работе:
во время увеличения запроса водителя оценивают запрос крутящего момента ВОМ на основе выходного крутящего момента двигателя относительно крутящего момента на ведущем валу трансмиссии; и
во время последующего уменьшения запроса водителя регулируют выходной крутящий момент двигателя на основе уменьшения запроса водителя и дополнительно на основе запроса крутящего момента ВОМ.
10. Способ по п. 9, отличающийся тем, что в нем при указанной регулировке регулируют профиль частоты вращения двигателя для поддержания оцененного запроса крутящего момента ВОМ при уменьшении запроса водителя.
11. Способ по п. 10, отличающийся тем, что в нем при регулировке профиля частоты вращения двигателя назначают коэффициент усиления для одного или более исполнительных механизмов крутящего момента двигателя на основе оцененного запроса крутящего момента ВОМ для линейного уменьшения частоты вращения двигателя с меньшей скоростью в соответствии с уменьшением запроса водителя, когда растет оцененный запрос крутящего момента ВОМ.
12. Способ по п. 9, отличающийся тем, что в нем запрос крутящего момента ВОМ, основанный на выходном крутящем моменте двигателя относительно крутящего момента на ведущем валу трансмиссии, является необработанным запросом крутящего момента ВОМ, и причем при выполнении указанной оценки отфильтровывают необработанный запрос крутящего момента ВОМ.
13. Способ по п. 9, отличающийся тем, что в нем при отфильтровывании используют переменную временную константу, причем эта переменная временная константа основана на отклонениях предполагаемой нагрузки ВОМ от отфильтрованной нагрузки ВОМ во время увеличения запроса водителя.
14. Способ для двигателя, в котором:
в соответствии с первым изменением запроса водителя, полученным при работе устройства ВОМ посредством двигателя в первом режиме, когда автомобиль неподвижен, прекращают работу устройства ВОМ посредством двигателя; и
в соответствии со вторым изменением запроса водителя, полученным при работе устройства ВОМ посредством двигателя во втором режиме, когда автомобиль движется, регулируют работу двигателя для соответствия второму изменению запроса водителя при поддержании работы устройства ВОМ.
15. Способ по п. 14, отличающийся тем, что двигатель соединен с автомобилем, и при работе устройства ВОМ во втором режиме скорость автомобиля больше нуля, и гидротрансформатор, присоединенный между двигателем и колесами автомобиля, разблокирован.
16. Способ по п. 14, отличающийся тем, что при работе устройства ВОМ посредством двигателя в первом режиме устанавливают заданную частоту вращения холостого хода двигателя на основе нагрузки ВОМ и регулируют работу двигателя для поддержания указанной заданной частоты вращения холостого хода двигателя; и причем при работе устройства ВОМ посредством двигателя во втором режиме регулируют работу двигателя на основе нагрузки ВОМ для поддержания крутящего момента на колесе при изменении запроса водителя.
17. Способ по п. 14, отличающийся тем, что первое изменение запроса водителя содержит увеличение запроса водителя, и причем второе изменение запроса водителя содержит увеличение или уменьшение запроса водителя, и причем в способе дополнительно, когда второе изменение запроса водителя является увеличением запроса водителя, оценивают нагрузку ВОМ на двигатель на основе выходного крутящего момента двигателя относительно выходного крутящего момента гидротрансформатора, и причем, когда второе изменение запроса водителя является уменьшением запроса водителя, используют оценку нагрузки ВОМ для регулировки выходного крутящего момента двигателя.
18. Способ по п. 17, отличающийся тем, что в нем, при оценке нагрузки ВОМ, оценивают необработанную нагрузку ВОМ на основе разности между выходным крутящим моментом двигателя и выходным крутящим моментом гидротрансформатора и дополнительно оценивают отфильтрованную нагрузку ВОМ на основе изменения необработанной нагрузки ВОМ в течение интервала времени, причем работу двигателя регулируют на основе отфильтрованной нагрузки ВОМ.
19. Способ по п. 17, отличающийся тем, что в нем, дополнительно, при работе во втором режиме, назначают коэффициенты усиления для регулировки одного или более из положения дросселя, графика подачи топлива и момента зажигания в соответствии с частотой вращения двигателя и отфильтрованной нагрузкой ВОМ посредством контроллера заданной частоты вращения для поддержания крутящего момента на колесе при изменениях запроса водителя.
| Устройство дистанционного управления синхронным валом отбора мощности | 1985 |
|
SU1288106A1 |
| Привод отбора мощности | 1990 |
|
SU1761559A1 |
| US 6553302 B2 22.04.2003 | |||
| US 7377103 B2 27.05.2008 | |||
| US 8046140 B2 25.10.2011. | |||

