Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения пространственного местоположения стационарных источников радиоизлучения (ИРИ), сведения о которых отсутствуют в базе данных (например, государственных радиочастотных служб или государственных служб надзора за связью). Изобретение может быть использовано при поиске местоположения несанкционированных средств радиосвязи как возможных источников помех связи.
Известны способы определения координат ИРИ, в которых используются пассивные пеленгаторы в количестве не менее трех, центр тяжести области пересечения выявленных азимутов которых на фронт прихода волны принимается за оценку местоположения. Основными принципами работы таких пеленгаторов являются амплитудные, фазовые и интерферометрические [1, 2]. К их недостаткам следует отнести высокую степень сложности антенных систем, коммутационных устройств и наличие многоканальных радиоприемников, а также необходимость в быстродействующих системах обработки информации.
Наличие в федеральных округах государственной радиочастотной службы взаимосвязанных через центральный пункт разветвленной сети радиоконтрольных постов, оборудованных средствами приема радиосигналов, измерения и обработки их параметров, позволяет дополнить их функции и задачами определения местоположения тех ИРИ, сведения о которых отсутствуют в базе данных, не прибегая к использованию сложных и дорогостоящих пеленгаторов. Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по технической сущности является способ [3], заключающийся в приеме сигналов источников радиоизлучений в полосе частот ΔF перемещающимся в пространстве измерителем. При перемещении измерителя измеряют уровни сигналов в N (N≥4) точках, последовательно вычисляют N-1 отношений уровней сигнала, по вычисленным отношениям строят N-1 круговых линий положения и определяют координаты источников радиоизлучения как точку пересечения N-1 круговых линий положения. Для повышения достоверности определения местоположения используют статистику.
Основные недостатки прототипа:
1. Количество точек измерения уровней сигналов N≥4, что для получения одного отсчета координат местоположения является избыточным.
2. Наличие сингулярности круговых линий положения (окружностей Аполлония Пергского) при близких значениях уровней сигналов в точках их измерения, приводящее к большой погрешности определения координат местоположения ИРИ.
3. Прототип не позволяет определять координаты местоположения ИРИ в пространстве.
4. Не учитываются дифракционные потери на трассах распространения радиосигналов, что приводит к методическим ошибкам определения координат местоположения ИРИ.
Целью настоящего изобретения является разработка способа определения координат местоположения на существующих радиоконтрольных постах Радиочастотной службы Российской Федерации, в котором устранены недостатки прототипа.
Эта цель достигается с помощью признаков, указанных в формуле изобретения.
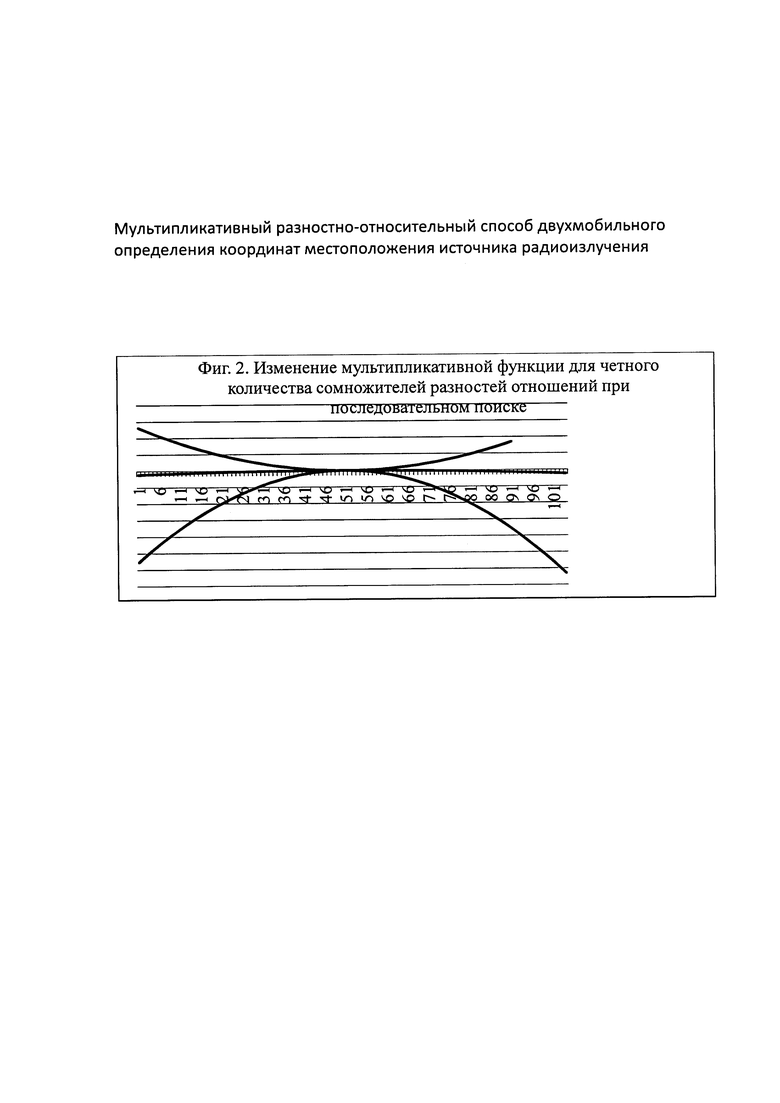
Мультипликативный разностно-относительный способ двухмобильного определения координат местоположения источника радиоизлучения, основанный на измерении уровней сигналов источника радиоизлучений (ИРИ) в нескольких точках пространства, не лежащих на одной прямой, сканирующими радиоприемными устройствами, перемещающимися в пространстве, и отличающийся тем, что для измерения параметров радиоизлучений ИРИ используют два мобильных радиоконтрольных поста, один из которых принят за базовый, и перемещают их по М=M1+M2 точкам измерения уровней сигналов радиоизлучений, находящихся в зоне электромагнитной доступности постов, передают на базовый пост координаты точек и результаты измерения, задают координаты пробной точки ПТ(xi, yi, zi) как координаты возможного местоположения искомого ИРИ, создают набор функций разностей fij=(nij-nji) отношений (ФРО)  расстояний
расстояний  от каждой jk точки измерения к расстоянию
от каждой jk точки измерения к расстоянию  jn точки до положения ПТ(xi, yi, zi) и вычисленных соответствующих, но обратных, отношений уровней U сигнала
jn точки до положения ПТ(xi, yi, zi) и вычисленных соответствующих, но обратных, отношений уровней U сигнала  , создают набор
, создают набор  мультипликативных функций (МПФ) в виде суммы четных
мультипликативных функций (МПФ) в виде суммы четных  и нечетных
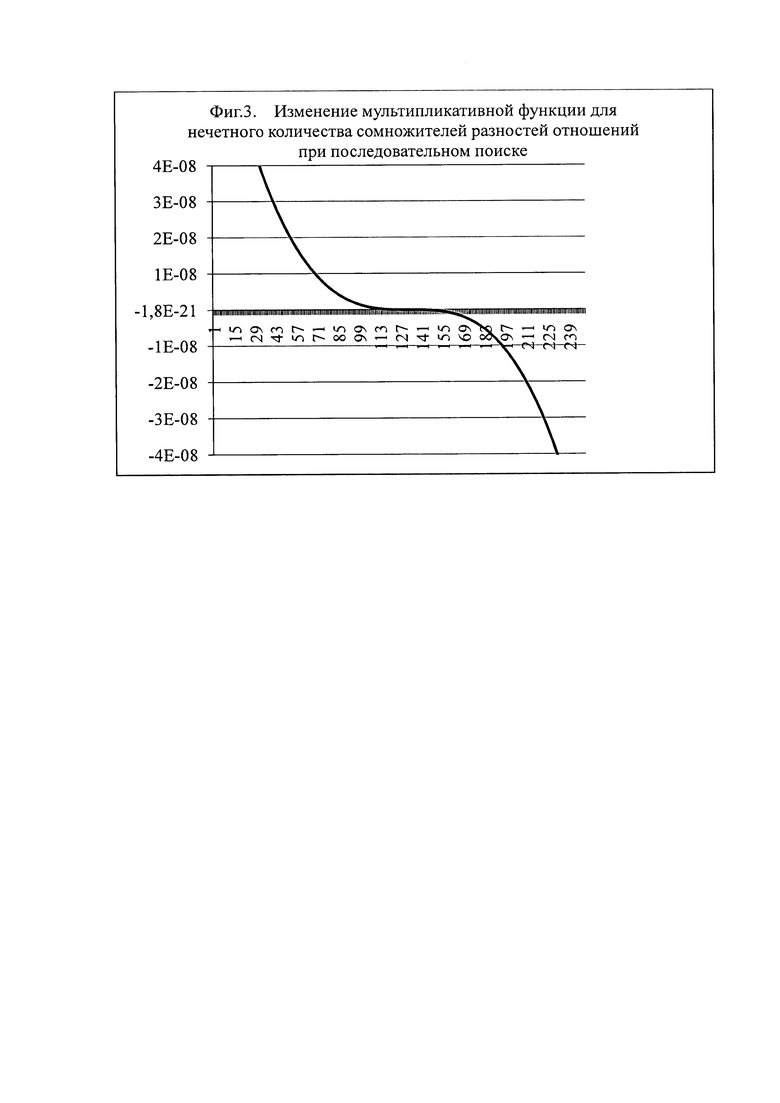
и нечетных  МПФ, вычисляют координаты точек экстремума четных МПФ и координаты точек перегиба нечетных МПФ, полученных для заданных из известного диапазона значений широт, долгот и высот местоположения искомого источника радиоизлучения, и измеренных соответствующих обратных парных отношений усредненных уровней сигналов источника, дихотомически изменяют значение одного из параметров местоположения ПТ при неизменных значениях двух других до достижения каждой четной МПФ значения, близкого к экстремальному, и каждой нечетной МПФ значения точки перегиба соответствующего заданной погрешности дискретизации значения каждого параметра, и фиксации после усреднения значения каждого параметра местоположения источника как окончательного.
МПФ, вычисляют координаты точек экстремума четных МПФ и координаты точек перегиба нечетных МПФ, полученных для заданных из известного диапазона значений широт, долгот и высот местоположения искомого источника радиоизлучения, и измеренных соответствующих обратных парных отношений усредненных уровней сигналов источника, дихотомически изменяют значение одного из параметров местоположения ПТ при неизменных значениях двух других до достижения каждой четной МПФ значения, близкого к экстремальному, и каждой нечетной МПФ значения точки перегиба соответствующего заданной погрешности дискретизации значения каждого параметра, и фиксации после усреднения значения каждого параметра местоположения источника как окончательного.
В основе способа лежит принцип последовательного определения параметров местоположения ИРИ: широты - Xi, долготы - Yi и высоты Zi по критерию минимума разностей отношений расстояний местоположения ИРИ до каждой из соответствующих точек измерения и соответствующих обратных отношений уровней сигналов, измеренных в этих точках. Координаты при этом могут вычисляться по методу дихотомии, например методу поразрядного уравновешивания. Для его использования априори должны быть известны диапазоны D значений искомых величин. Эти диапазоны обычно известны исходя из параметров зоны электромагнитной доступности используемых мобильных постов радиоконтроля. В соответствии с алгоритмом поразрядного уравновешивания первоначально задают среднее из диапазона D значение определяемой величины (например, широты) при фиксированных, но лежащих в известных диапазонах значений долготы и высоты. Вычисляют расстояния от i-го местоположения ИРИ до каждой j-ой точки измерения (j≤3),  . Затем вычисляют парные отношения этих расстояний
. Затем вычисляют парные отношения этих расстояний  и т.д. Всего
и т.д. Всего  сочетаний таких отношений. Эти отношения позволяют исключить зависимость вычисления координат местоположения от мощности ИРИ. Полученные отношения сравнивают путем вычитания с обратными отношениями уровней сигналов в точках приема
сочетаний таких отношений. Эти отношения позволяют исключить зависимость вычисления координат местоположения от мощности ИРИ. Полученные отношения сравнивают путем вычитания с обратными отношениями уровней сигналов в точках приема  и т.д., всего отношений
и т.д., всего отношений
Например, для точек 1 и 2 эту разность определяют, как f12=n12-n21. Для точек 2 и 3 - f23=n23-n32 и т.д. Если разность отношений меньше нуля, то к первоначальному значению широты добавляют 1/4 часть диапазона. В противном случае из первоначального значения широты вычитают 1/4 часть диапазона ее значения. Затем опять производят вычисление расстояний до постов и оценку результатов сравнения, как описано выше. При этом добавляют (или вычитают) уже 1/8 часть диапазона, затем 1/16 часть и т.д. Такие итерации продолжают до тех пор, пока результат сравнения не окажется по модулю меньше заранее заданного значения погрешности дискретизации каждого параметра местоположения  , где m - количество итераций. На фиг. 1 показано изменение этих функций для трех пар точек измерения при последовательном, равномерно-ступенчатом (для наглядности) поиске. После этого фиксируют полученное значение параметра. Затем аналогично вычисляют значение долготы при найденной широте, а затем и высоты. Отметим, что данный способ для одной пары точек измерения может иметь неоднозначность результата. Минимум любой из разностей свидетельствует о нахождении местоположения ПРИ в точке с выбранными координатами. Но так как координаты ИРИ находятся на перпендикуляре к линии баз, то каждая из отдельных разностей будет иметь минимальное значение при нахождении ИРИ по обе стороны от баз. Возникает неоднозначность. Для устранения неоднозначности составляют четные МПФ Fчтij и нечетные Fнчтij, отличающиеся тем, что координаты искомого ИРИ находят как координаты точки экстремума четных МПФ и как координаты точки перегиба нечетных МПФ. Четные МПФ состоят из четного количества ФРО Например, для точек 1 и 2:
, где m - количество итераций. На фиг. 1 показано изменение этих функций для трех пар точек измерения при последовательном, равномерно-ступенчатом (для наглядности) поиске. После этого фиксируют полученное значение параметра. Затем аналогично вычисляют значение долготы при найденной широте, а затем и высоты. Отметим, что данный способ для одной пары точек измерения может иметь неоднозначность результата. Минимум любой из разностей свидетельствует о нахождении местоположения ПРИ в точке с выбранными координатами. Но так как координаты ИРИ находятся на перпендикуляре к линии баз, то каждая из отдельных разностей будет иметь минимальное значение при нахождении ИРИ по обе стороны от баз. Возникает неоднозначность. Для устранения неоднозначности составляют четные МПФ Fчтij и нечетные Fнчтij, отличающиеся тем, что координаты искомого ИРИ находят как координаты точки экстремума четных МПФ и как координаты точки перегиба нечетных МПФ. Четные МПФ состоят из четного количества ФРО Например, для точек 1 и 2:  . Для точек 1, 2, 3 и 4:
. Для точек 1, 2, 3 и 4:  и т.д. Всего может быть составлено
и т.д. Всего может быть составлено  четных мультипликативных функций ФРО. Приведем примеры составления нечетных МПФ. Для точек измерения 1, 2 и 3 эта функция имеет вид:
четных мультипликативных функций ФРО. Приведем примеры составления нечетных МПФ. Для точек измерения 1, 2 и 3 эта функция имеет вид:  , для точек 1-5 имеет вид:
, для точек 1-5 имеет вид:
 . Всего таких МПФ может быть составлено
. Всего таких МПФ может быть составлено  для М точек измерения.
для М точек измерения.
На фиг. 1 показаны зависимости разностей отношений для трех пар точек измерения, на фиг. 2 - для трех парных произведений разностей отношений, фиг. 3 - МПФ функций для трех разностей отношений.
Итак, алгоритмически способ предусматривает выполнение следующих операций.
1. Измеряют не менее чем в двух точках траектории движения каждого мобильного поста радиоконтроля, не лежащих на одной прямой и находящихся в их общей зоне электромагнитной доступности, уровни сигналов ИРИ, перестраивая на несущие частоты сканирующий приемник поста и сохраняя в базе данных результаты измерения и координаты точек измерения уровней.
2. Результаты измерений по линии связи передают на базовый пост, где:
1. Вычисляют отношения расстояний от точек измерения до пробной точки ПТ как возможного местоположения ИРИ, и обратные отношения соответствующих измеренных уровней сигналов ИРИ.
2. Составляют функций разностей парных отношений расстояний от точек измерения уровней до возможного местоположения ИРИ и соответствующих обратных отношений измеренных уровней.
3. Создают четные Fчтij и нечетные Fнчтij МПФ в количестве  и
и 
4. Задают из заранее известного диапазона координат возможного местоположения ИРИ два параметра координат (например, долготу и высоту), а один из параметров координат, например широту, дихотомически изменяют и вычисляют при этом возможное расстояние ИРИ до каждой из точек выполненных измерений до тех пор, пока каждое из четных МПФ с заданной погрешностью не достигнет экстремального значения, а также пока каждая из нечетных МПФ не достигнет точки перегиба.
5. Значения параметров, полученные в экстремальных точках и точках перегиба усредняют и принимают за окончательные.
6. Процедуры по пп. 3 и 4 повторяют последовательно для получения долготы, а затем и высоты местоположения искомого ИРИ.
Способ позволяет существенно (в 580 раз) увеличить статистику и тем самым повысить точность определения координат, а также сократить время на их определение. В подтверждение этому
приведем сравнительную таблицу для прототипа и способа.
Из таблицы видно, что предложенный способ дает увеличение статистики по сравнению с прототипом в 588 раз и, следовательно, снижает среднеквадратическую ошибку определения координат искомого ИРИ в 24 раза по сравнению с прототипом.
В предлагаемом способе устранены недостатки прототипа:
1. Исключены какие-либо сложные уравнения линий местоположения ИРИ со скрытыми в них ошибками сингулярности. В предлагаемом способе мультипликативные функции разности отношений конечных величин (расстояний и обратных уровней сигналов) являются гладкими и не создают сингулярных погрешностей.
2. Предложенный способ обеспечивает определение координат местоположения ИРИ не только на поверхности Земли, но и в пространстве.
3. Минимальное количество точек измерения каждым мобильным постом сокращено с четырех до двух, что свидетельствует о повышении быстродействия способа по сравнению с прототипом.
4. Способ позволяет при одном и том же количестве точек измерений увеличить по сравнению с прототипом более чем 500 статистику и, следовательно, повысить более чем в 24 раза точность определения координат.
Все это указывает на наличие новизны предложенного способа.
Следует отметить, что способ является наиболее универсальным, не требует сложных вычислений и легко реализуем.
Источники информации
1. Справочник по радиоконтролю. Международный союз электросвязи. - Женева: Бюро радиосвязи. 2002. - 585 с.
2. Корнеев И.В., Ленцман В.Л. и др. Теория и практика государственного регулирования использования радиочастот и РЭС гражданского применения. Сборник материалов курсов повышения квалификации специалистов радиочастотных центров федеральных округов. Книга 2. - СПб.: СПбГУТ. 2003.
3. Патент RU №2306579, опубл. 20.09.2007 г.
4. Е. Корн и Т. Корн. Справочник по математике. Для научных работников и инженеров / Под ред. Арамановича И.Г. - М.: «Наука». 1968. - 720 с.
5. Рек. МСЭ-R, R.526-12.
Изобретение относится к области радиотехники, а именно к системам радиоконтроля для определения местоположения источников радиоизлучения. Техническим результатом является определение пространственных координат местоположения стационарных источников радиоизлучений (ИРИ) двумя мобильными (на любой транспортной базе: автомобильная, вертолетная, корабельная) постами, один из которых принят за базовый, простым способом без привлечения уравнений линий положения. Способ основан на использовании измерений мобильными постами радиоконтроля значений уровней сигналов на каждой из назначенных частот не менее чем в трех точках пространства и преобразовании в мультипликативные функции разностей их обратных отношений и разностей отношений вычисленных расстояний от точек измерения до пробной точки предполагаемого местоположения источника радиоизлучения. Для обработки составленных мультипликативных функций указанных разностей отношений предложен дихотомический способ. В его основе лежит принцип последовательного определения параметров местоположения ИРИ: широты - Xi, долготы - Yi и высоты - Zi по критерию поиска минимума разностей отношений расстояний местоположения ИРИ до точек измерения, не расположенных на одной прямой, и соответствующих обратных отношений величин измеренных уровней сигналов. Реализуется способ выполнением определенных вычислений. 3 ил., 1 табл.
Мультипликативный разностно-относительный способ двухмобильного определения координат местоположения источника радиоизлучения, основанный на измерении уровней сигналов источника радиоизлучений (ИРИ) в нескольких точках пространства, не лежащих на одной прямой, сканирующими радиоприемными устройствами, перемещающимися в пространстве, и отличающийся тем, что для измерения параметров радиоизлучений ИРИ используют два мобильных радиоконтрольных поста, один из которых принят за базовый, и перемещают их по M=M1+M2 точкам измерения уровней сигналов радиоизлучений, находящихся в зоне электромагнитной доступности постов, передают на базовый пост координаты точек и результаты измерения, задают координаты пробной точки ПТ (xi, yi, zi) как координаты возможного местоположения искомого ИРИ, создают набор функций разностей fij=(nij-nji) отношений (ФРО)  расстояний
расстояний  от каждой jk точки измерения к расстоянию
от каждой jk точки измерения к расстоянию  jn точки до положения ПТ (xi, yi, zi), и вычисленных соответствующих, но обратных отношений уровней U сигнала
jn точки до положения ПТ (xi, yi, zi), и вычисленных соответствующих, но обратных отношений уровней U сигнала  , создают набор
, создают набор  мультипликативных функций (МПФ) в виде суммы четных
мультипликативных функций (МПФ) в виде суммы четных  и нечетных
и нечетных  МПФ, вычисляют координаты точек экстремума четных МПФ и координаты точек перегиба нечетных МПФ, полученных для заданных из известного диапазона значений широт, долгот и высот местоположения искомого источника радиоизлучения, и измеренных соответствующих обратных парных отношений усредненных уровней сигналов источника, дихотомически изменяют значение одного из параметров местоположения ПТ при неизменных значениях двух других до достижения каждой четной МПФ значения, близкого к экстремальному, и каждой нечетной МПФ значения точки перегиба соответствующего заданной погрешности дискретизации значения каждого параметра, и фиксации после усреднения значения каждого параметра местоположения источника как окончательного.
МПФ, вычисляют координаты точек экстремума четных МПФ и координаты точек перегиба нечетных МПФ, полученных для заданных из известного диапазона значений широт, долгот и высот местоположения искомого источника радиоизлучения, и измеренных соответствующих обратных парных отношений усредненных уровней сигналов источника, дихотомически изменяют значение одного из параметров местоположения ПТ при неизменных значениях двух других до достижения каждой четной МПФ значения, близкого к экстремальному, и каждой нечетной МПФ значения точки перегиба соответствующего заданной погрешности дискретизации значения каждого параметра, и фиксации после усреднения значения каждого параметра местоположения источника как окончательного.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2006 |
|
RU2306579C1 |
| ДИХОТОМИЧЕСКИЙ МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНОГО РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2562613C2 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2363011C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| WO 2009065943 A1, 28.05.2009 | |||
| US 5742252 A, 21.04.1998 | |||
| WO 2013085587 A1, 13.06.2013. | |||

