Изобретение относится к области радиотехники, а именно к пассивным системам радиоконтроля, и, в частности, может быть использовано в системах местоопределения источников радиоизлучений (ИРИ).
Известны системы определения координат [1, 2], реализующие разностно-дальномерный способ определения координат источника радиоизлучения. Они заключаются в приеме и измерении задержек Δτi сигнала группой взаимосвязанных с известным местоположением пунктов приема, решении гиперболических уравнений на центральном приемном пункте, на основе которого определяют координаты источника радиоизлучения.
Недостатком данного способа является необходимость использования минимум трех измерительных пунктов и системы связи между ними, при этом все измерения должны производиться одновременно, и, как следствие, необходимость использования достаточно сложной системы единого времени, что затрудняет реализацию данных технических решений.
Известен разностно-доплеровский способ определения координат [3]. Сущность способа заключается в приеме сигнала ИРИ на двух перемещающихся измерителях, ретрансляции сигналов на центральный пункт обработки, вычислении разности доплеровских частот и разности радиальных скоростей измерителей с последующим вычислением координат ИРИ по разности доплеровских частот и разности радиальных скоростей.
Недостаток данного способа - необходимость использования минимум двух измерительных пунктов, кроме того, данные пункты должны перемещаться с достаточно большой скоростью, и данный способ не позволяет измерять координаты ИРИ, излучающих непрерывные или квазинепрерывные сигналы, т.к. в данном случае нельзя точно измерить разность частот сигнала [3, 4].
Из известных способов наиболее близким аналогом (прототипом) [5] предлагаемого способа по технической сущности является способ, включающий прием сигналов источников радиоизлучений в заданной полосе частот ΔF перемещающимся в пространстве пеленгатором, измерение первичных пространственно-информационных параметров обнаруженных сигналов с одновременным измерением вторичных параметров: координат местоположения и пространственной ориентации антенной решетки подвижного пеленгатора, преобразование первичных пространственно-информационных параметров в пространственные параметры: азимутальный угол Θ, Θ=0, ..., 360°, и угол места β, β=0, ..., 90°, многократное повторное измерение в процессе перемещения пеленгатора совокупности пространственных параметров обнаруженных сигналов и соответствующих им вторичных параметров, определение местоположения источников радиоизлучений с помощью решения системы линейных уравнений.
Недостатки способа прототипа:
1. Необходимость использования радиопеленгатора с достаточно сложной антенной системой и многоканального радиоприемного устройства.
2. Необходимость определения ориентации антенной решетки в пространстве.
Целью настоящего изобретения является разработка способа, обеспечивающего определение координат ИРИ одним перемещающимся измерителем и существенное упрощение технических средств радиоконтроля.
Поставленная цель достигается тем, что в известном способе местоопределения ИРИ, включающем в себя прием сигналов источников радиоизлучений в заданной полосе частот ΔF перемещающимся в пространстве пеленгатором, измерение первичных координатно-информативных параметров обнаруженных сигналов с одновременным измерением вторичных параметров: координат местоположения и пространственной ориентации антенной решетки подвижного пеленгатора, преобразование первичных пространственно информационных параметров в пространственные параметры: азимутальный угол Θ, Θ=0, ..., 360°, и угол места β, β=0, ..., 90°, многократное повторное измерение в процессе перемещения пеленгатора совокупности пространственных параметров обнаруженных сигналов и соответствующих им вторичных параметров, определение местоположения источников радиоизлучений с помощью решения системы линейных алгебраических уравнений, исключают операцию измерения пеленга, а в качестве первичных координатно-информативных параметров используют уровень сигнала, при этом измеряют уровни сигнала в N (N≥4) точках при перемещении измерителя, последовательно вычисляют N-1 отношений уровней сигнала, по вычисленным отношениям строят N-1 круговых линий положения и определяют координаты источников радиоизлучений как точку пересечения N-1 круговых линий положения путем решения системы нелинейных уравнений.
Сопоставительный анализ с прототипом показывает, что заявляемый способ отличается тем, что для определения координат ИРИ используются круговые линии положения (окружности Апполония) и соответственно нелинейные уравнения. Таким образом, заявляемый способ соответствует критерию изобретения «новизна».
Сравнение заявляемого способа с другими аналогичными способами показывает необходимость выполнения известных операций - прием сигналов источников радиоизлучений в заданной полосе частот ΔF перемещающимся в пространстве измерителем, измерение первичных координатно-информативных параметров обнаруженных сигналов с одновременным измерением вторичных параметров, однако использование в качестве первичных координатно-информативных параметров отношений уровней сигнала позволяет сделать вывод о соответствии заявляемого способа критерию «существенные отличия».
Положим, что объект измерений, стационарные ИРИ, излучают радиосигналы на известных частотах. Подвижный измеритель осуществляет прием сигналов согласованным с ними трактом. В результате первичной обработки параметров излучения для каждой из N точек пространства и по каждой из М частот измеритель определяет уровень сигнала на входе РПУ Рj(хi, yi), (дБ), где (xi, yi) - координаты i-й точки измерений;  - номер точки измерения;
- номер точки измерения;  - номер частоты.
- номер частоты.
Каждое измерение с помощью навигационного оборудования сориентировано в пространстве и привязано по координатам и высоте подъема.
Необходимость оценки местоположения ИРИ в условиях отсутствия информации о мощности передающего устройства не позволяет использовать существующие модели распространения радиоволн ввиду априорной неопределенности.
Предлагается производить оценку местоположения ИРИ с помощью определения приращения уровня сигнала при движении измерителя.
Уравнение передачи в общем случае имеет вид [6]

где Рпер - мощность передатчика; Gпер - коэффициент усиления антенно-фидерного тракта (АФТ) передатчика; Gпр - коэффициент усиления АФТ приемника; Wmp - затухание радиосигнала на трассе распространения.
Очевидно, что все параметры, за исключением затухания радиосигнала, не зависят от взаимного расположения измерителя и излучателя. Следовательно, приращение уровня сигнала, измеренного i+1-й точке относительно предыдущей, можно записать

При использовании дифракционной модели распространения радиоволн в городских условиях затухание на трассе можно представить [6]

где Wo - затухание в свободном пространстве; Wrd - затухание при дифракции от крыши ближайшего к измерителю здания; Wmd - затухание от множественной дифракции плоских волн, вызванной рядами зданий на трассе.
Ввиду невозможности прогнозирования быстроменяющегося окружения измерителя считаем Wrd и Wmd постоянными величинами на интервале соседних измерений. Отсюда (2) принимает вид

где λ - длина волны ИРИ; Ri и Ri+1 - расстояние от ИРИ до измерителя, находящегося в точке i и i+1 соответственно. Отношение расстояний до излучателя от точек измерения примет вид

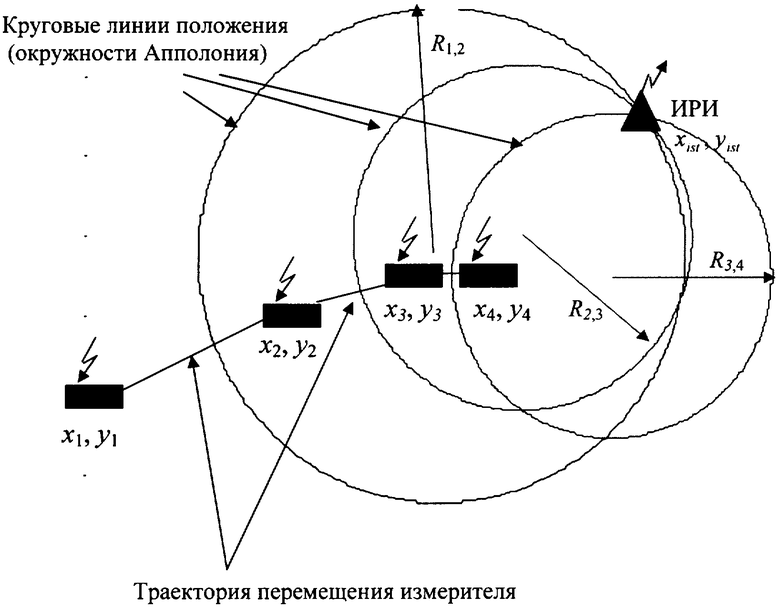
Известно, что геометрическое место точек плоскости, отношение расстояний от которых до двух данных точек - величина постоянная, и определяет окружность Апполония. А следовательно, источник излучения может находиться в любой точке окружности Апполония, проходящей в соответствии с условием (5). При движении измерителя по маршруту, окружности, образованные приращением уровня радиосигнала, пересекаются в точке, являющейся оценкой местоположения ИРИ (см. чертеж).
Запишем уравнение для окружности Апполония, определяемое условием (5).
Положим, что ИРИ располагается в точке с координатами хist, yist, зная координаты измерителя хi, yi и отношение уровней сигнала в точках стояния измерителя, необходимо найти координаты ИРИ хist, yist.
Радиус окружности Апполония, определяемый (5), будет иметь вид
 и центр в точке
и центр в точке  и соответственно уравнение круговой линии положения (окружности Апполния), связывающее координаты ИРИ, и измеренные приращения уровней сигнала будут иметь вид
и соответственно уравнение круговой линии положения (окружности Апполния), связывающее координаты ИРИ, и измеренные приращения уровней сигнала будут иметь вид

Очевидно, что две круговые линии положения имеют две точки пересечения, следовательно, для однозначного определения координат ИРИ нам необходимо построить минимум три круговые линии положения. Таким образом, решая систему
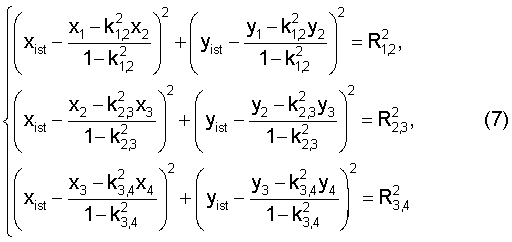
из N-1 (N=4) уравнений вида (6), имеем искомые координаты хist, yist. Указанные действия производим на каждой из М обнаруженных частот.
Таким образом, мы получили минимально необходимые условия применения для реализации заявленного способа.
Учитывая, что координаты ИРИ однозначно определяются тремя окружностями Апполония (см. чертеж), а при количестве точек измерения больше четырех мы получим N-3 точек пересечения и, строго говоря, они не будут совпадать вследствие разных ошибок измерения первичных параметров, в разное время и в разных точках стояния измерителя. Таким образом, в общем случае мы имеем N-3 измеренных координат, дальнейший расчет (уточнение) координат будем определять как математическое ожидание всех полученных координат точек пересечения

где  ,
,  - оцененные координаты ИРИ; xk, yk - координаты точек пересечения - решения системы уравнений типа (7).
- оцененные координаты ИРИ; xk, yk - координаты точек пересечения - решения системы уравнений типа (7).
Так как указанные измерения уровней сигнала производят в разное время, в разных условиях, точность измерения данных параметров в разных точках будет различна, кроме того, при составлении уравнений типа (7) мы использовали только последовательные приращения уровней сигнала. Вместе с тем, по измеренным уровням сигнала всегда можно построить G2 N, круговых линий положения (где  - число всех различных сочетаний из 2 по N), т.е. дополнительно можно построить С2 N-(N-1) круговых линий положения. Данное обстоятельство позволяет повысить точность определения координат за счет использования дополнительных линий положения. Тогда выражение для оценки координат в отличие от (8) будет иметь вид
- число всех различных сочетаний из 2 по N), т.е. дополнительно можно построить С2 N-(N-1) круговых линий положения. Данное обстоятельство позволяет повысить точность определения координат за счет использования дополнительных линий положения. Тогда выражение для оценки координат в отличие от (8) будет иметь вид

Необходимые технические средства для реализации заявленного способа являются широко известными.
Для определения координат измерителя можно воспользоваться спутниковым навигационным приемником, в частности можно воспользоваться навигатором GPS (см., например, Garmin. GPS навигаторы 12, 12XL, 12СХ. Руководство пользователя www.jj.connect.ru). Следует отметить, что в отличие от средств пеленгования устройство измерения уровня сигнала может быть реализовано на любом радиоприемном устройстве соответствующего диапазона частот (практически все радиоприемные устройства осуществляют измерение уровня сигнала). При этом он может быть выполнен в носимом варианте, что позволяет существенно упростить технические средства радиоконтроля. Кроме того, для измерения уровня сигнала не требуется использование сложных антенных решеток, что также позволяет упростить технические средства радиоконтроля.
Как видно из приведенного описания, заявленный способ определения координат не требует наличия радиопеленгатора и все измерения можно производить одним перемещающимся измерителем.
Следовательно, можно сделать вывод, что цель, поставленная перед изобретением, - разработка способа, обеспечивающего определение координат ИРИ одним перемещающимся измерителем и существенное упрощение технических средств радиоконтроля, достигнута.
Технико-экономический эффект, обусловленный применением данного способа, заключается в упрощении технических средств для определения местоположения источников радиоизлучений, а следовательно, повышении экономической эффективности пассивных систем радиоконтроля.
Количественная величина ожидаемого технико-экономического эффекта от использования предложенного способа зависит от типа системы подлежащей радиоконтролю и важности данной системы, ее определение возможно после внедрения предложенного способа в конкретных системах радиоконтроля.
Источники информации
1. Патент RU №2000129837, опубл. 20.10.2002 г.
2. Патент RU №2204145, опубл. 05.10.2003 г.
3. Кондратьев B.C. и др. Многопозиционные радиотехнические системы. - М.: Радио и связь, 1986. - 264 с.
4. Torrierry D.J. Statistical Theory of Passive Location Systems // IEEE Trans. 1984. V.AES-20. №2. P.183.
5. Патент RU 2124222, МПК G01S 13/46, опубл. 27.12.1998 г.
6. Бабков В.Ю., Вознюк М.А., Михайлов П.А. Сети мобильной связи. Частотно-территориальное планирование / СПбГУТ. СПб., 2000. 196 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МОБИЛЬНЫХ СТАНЦИЙ | 2005 |
|
RU2297718C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2012 |
|
RU2510044C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2476900C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2327186C1 |
| ДИХОТОМИЧЕСКИЙ МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ МОБИЛЬНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2558639C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2296341C1 |
| МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ СТАЦИОНАРНО-МОБИЛЬНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2558638C2 |
| ОДНОПОЗИЦИОННЫЙ КОРРЕЛЯЦИОННЫЙ УГЛОМЕРНЫЙ ОТНОСИТЕЛЬНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2017 |
|
RU2666555C2 |
Изобретение относится к области радиотехники, а именно к пассивным системам радиоконтроля, и, в частности, может быть использовано в системах местоопределения источников радиоизлучений. Техническим результатом является определение координат источников радиоизлучений одним перемещающимся измерителем, обеспечивающее существенное упрощение технических средств радиоконтроля. Способ определения координат источников радиоизлучений заключается в приеме сигналов источников радиоизлучений в заданной полосе частот ΔF перемещающимся в пространстве измерителем, измерение первичных координатно-информативных параметров обнаруженных сигналов с одновременным измерением и запоминанием вторичных параметров: координат местоположения измерителя, многократное повторное измерение совокупности первичных и вторичных параметров в процессе перемещения измерителя по свободной траектории, при этом в качестве первичных координатно-информативных параметров используют уровень сигнала. При перемещении измерителя измеряют уровни сигнала в N (N≥4) точках, последовательно вычисляют N-1 отношений уровней сигнала, по вычисленным отношениям строят N-1 круговых линий положения и определяют координаты источников радиоизлучении как точку пересечения N-1 круговых линий положения. Повышение точности определения координат источников радиоизлучений достигается также за счет использовании  круговых линий положения, где
круговых линий положения, где  - число всех различных сочетаний из 2 по N, (N≥4). 1 з.п. ф-лы, 1 ил.
- число всех различных сочетаний из 2 по N, (N≥4). 1 з.п. ф-лы, 1 ил.
 круговых линий положения, где - число всех различных сочетаний из 2 по N.
круговых линий положения, где - число всех различных сочетаний из 2 по N.
| ПОДВИЖНЫЙ ПЕЛЕНГАТОР | 1997 |
|
RU2124222C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263928C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2258941C1 |
| US 5512909 A, 30.04.1996 | |||
| US 6239746 B1, 29.05.2001 | |||
| WO 2004011955 A1, 05.02.2004. | |||

