Изобретение относится к автомобилестроению, в частности, к способам и устройствам повышения активной безопасности транспортных средств.
Одной из основных причин дорожно-транспортных происшествий является неудовлетворительное состояние водителя.
К числу главных факторов, вызывающих неудовлетворительное состояние водителя, относятся усталость, алкогольное или наркотическое опьянение, обострение хронических заболеваний, стрессовые ситуации и др. Для возможности анализа причин дорожно-транспортных происшествий указанные состояния водителя необходимо не только своевременно выявлять, но и своевременно регистрировать.
По определению ГОСТ Р МЭК 61850-5-2011: система - группа взаимодействующих объектов, выполняющих общую функциональную задачу, в основе которой лежит некоторый механизм связи.
В мировой практике накоплен значительный опыт по созданию систем мониторинга состояния водителя. Принцип их действия основан на измерении определенных физиологических параметров состояния водителя: частоты пульса, артериального давления, частоты дыхания, положения головы, состояния зрачков глаз, частоты мерцания век, температуры участков тела, электропроводность кожи рук и т.д.
Известна система (см. публикованную заявку США №US 2015211868 А1, заявители NISSAN MOTOR CO., LTD, и THE UNIVERSITY OF TOKYO, опубл. 30.07.2015), содержащая блок питания, блок датчиков первичной информации, в том числе информации о состоянии водителя, блок математической обработки данных первичной информации, блок памяти, блок аналитической обработки информации, блок аварийных действий, блок настройки системы, блок регистрации состояний водителя, предрасполагающих аварийные состояния.
К недостаткам данной системы относится сложность системы датчиков и сложность конструкции блока математической и аналитической обработки первичных данных.
Известна система диагностики действий водителя (см. публикованную заявку США №2013184928, заявители KERKHOF BRAM [BE]; GOFFART BERNARD [BE]; DELVAULX THIERRY [BE]; JOORIS KRIS [BE]; POURVEUR PIERRE [BE], опубл. 18.07.2013), которая содержит блок питания, блок датчиков первичной информации о вождении, выполненный с возможностью получать любое из величины воздействий или операций (действий) водителя, поведения транспортного средства, состояния водителя и информации касательно окружающей обстановки, блок математической обработки данных первичной информации, блок памяти, блок аналитической обработки информации, блок аварийных действий, блок настройки системы, блок дорожной обстановки, блок регистрации событий, предрасполагающих аварийные состояния.
К недостаткам данной системы относится сложность системы датчиков и блока аналитической обработки информации.
Известна система контроля состояния водителя (см. патент США№US 9569984 В2, заявитель ABALTA TECHNOLOGIES, INC, опубл. 14.02 2017), содержащая блок питания, блок датчиков первичной информации, блок математической обработки данных первичной информации, блок памяти, блок аналитической обработки информации, блок аварийных действий, блок настройки системы, блок дорожной обстановки, блок регистрации состояний водителя, предрасполагающих аварийные состояния.
К недостаткам данной системы относится сложность системы математической обработки и оценки работы транспортного средства и водителя.
Известна система контроля состояния водителя (см. патент на полезную модель РФ № RU 103518 U1, заявители Девятовский Федор Алексеевич (RU), Быстров Александр Сергеевич (RU), Богданов Олег Николаевич (RU), Сапожников Владимир Васильевич (RU), опубл. 20.04.2011) содержащая блок питания, блок датчиков первичной информации, блок математической обработки данных первичной информации, блок памяти, блок аналитической обработки информации, блок аварийных действий, блок настройки системы, блок дорожной обстановки, блок регистрации состояний, предрасполагающих аварийные состояния.
К недостаткам данной системы относится сложность системы математической обработки и оценки работы транспортного средства и водителя, которая не может работать без блока измерения биомедицинских параметров водителя транспортного средства с датчиками, свидетельствующими о функционально-физиологическом состоянии водителя транспортного средства.
Известна система устройства контроля состояния водителя (см. патент на полезную модель РФ № RU 81131 U1, заявители Федеральное государственное образовательное учреждение высшего профессионального образования "Саратовский государственный аграрный университет имени Н.И. Вавилова", опубл. 10.03.2009) содержащая блок питания, блок датчиков первичной информации, блок математической обработки данных первичной информации, блок памяти, блок аналитической обработки информации, блок аварийных действий, блок настройки системы, блок дорожной обстановки.
К недостаткам данной системы относится то, что система устройства контроля состояния водителя обработки и оценки работы водителя требует установки на теле водителя датчиков его состояния, что неудобно для водителя.
Известна система устройства регистратора дорожно-транспортных происшествий, включающего блок датчиков контроля физиологического состояния водителя (см. патент на полезную модель РФ № RU 127498 U1, заявитель Открытое акционерное общество "Научно-производственное предприятие космического приборостроения "Квант" (RU), опубл. 27.04.2013) содержащая блок питания, блок датчиков первичной информации, блок обработки данных первичной информации, блок памяти, блок аварийных действий, блок настройки системы, блок дорожной обстановки, блок регистрации состояний водителя, предрасполагающих аварийные состояния.
К недостаткам данной системы относится сложность системы регистрации, не имеющей блоков математической и аналитической обработки и оценки работы транспортного средства и водителя, что не позволяет надежно выявить аварийно-опасные состояния водителя, а только регистрировать результаты аварий.
Известна система устройства контроля состояния водителя (см. патент на изобретение РФ № RU 2100224 С1, заявитель Фарбер Борис Славинович и Миркин Александр Самуилович, опубл. 27.12.1997) содержащая блок питания, блок датчиков первичной информации, блок памяти, блок логической обработки первичной информации, блок аварийных действий, блок настройки системы, блок дорожной обстановки.
К недостаткам данной системы относится сложность системы логической обработки и оценки работы транспортного средства, подача кодированного вибрационного сигнала водителю, затрудняющего его работу, так как он должен оценить аварийную опасность события и необходимую последовательность действий.
Известна телеметрическая система контроля бодрствования водителя (см. патент на изобретение РФ № RU 2200095 С1, заявитель Закрытое акционерное общество "Нейроком", опубл. 10.03.2003) содержащая блок питания, блок датчиков первичной информации, блок математической обработки данных первичной информации, блок памяти, блок аналитической обработки информации, блок аварийных действий.
К недостаткам данной системы относится сложность системы математической обработки и оценки работы и состояния бодрствования водителя, а также требование установки на теле водителя датчиков его состояния.
Известна система контроля состояния водителя (см. патент США № US 9663047 В2, заявители FICO MIRRORS, S.A и авторы, опубл. 30.05.2017), содержащая электрически соединенные блок питания, блок долговременной памяти эталонной и контрольной информации, устройство обработки непрерывных данных с электрически соединенными блоками датчиков первичной непрерывных и контрольной информации, блоками математической обработки непрерывных данных соответственно первичной, контрольной и эталонной информации, соединенными блоком долговременной памяти, блоками сравнения непрерывных данных первичной, контрольной и эталонной информации, блоками аналитической обработки непрерывных данных первичной, контрольной и эталонной информации, блоком окончательной аналитической обработки информации, блоком исполнения аварийных действий, блок настройки системы, блок контроля реальной дорожной обстановки, блок регистрации состояний водителя, предрасполагающих аварийные состояния.
Указанная система имеет наибольшее количество общих с предложенной системой признаков, решает аналогичную задачу и имеет одинаковое назначение, по этой причине мы принимаем ее в качестве наиболее близкого аналога, то есть прототипа.
Основным недостатком известной системы является сложность и связанная с этим относительная ненадежность системы, так как датчики определяющие физиологическое состояние водителя дублируют работу остальных датчиков, но их работа не направлена на выявление сонного состояния водителя, а регистрация всех параметров состояния водителя и автомобиля для последующего анализа требует огромной долговременной памяти, больших затрат времени и средств для анализа.
Техническая задача, для решение которой предназначена система контроля состояния бодрствования водителя транспортного средства состоит в повышении надежности выявления опасного состояния сонливости водителя и регистрация каждого такого состояния, то есть минимизировать объем сохраняемой информации, предназначенной для последующего анализа. При этом однозначно и точно ответить на вопросы, не только о состоянии водителя в момент инцидента, но и как водитель управлял автомобилем в предшествующий инциденту период времени. При этом система предназначена для выявления действительно опасных для всех участников движения состояний водителя.
Техническая задача решается тем, что система контроля состояния бодрствования водителя автомобиля содержит электрически соединенные: блок 2 питания, блок 3 долговременной памяти эталонной и контрольной информации, блок 4 настройки системы, блок 5 контроля реальной дорожной обстановки, блок 6 регистрации состояний водителя, предрасполагающих к аварийным состояниям, устройство 7 обработки непрерывных данных с электрически соединенными блоками 8 датчиков первичной непрерывных и контрольной информации, блоками 9 математической обработки непрерывных данных соответственно первичной, контрольной и эталонной информации, соединенными с блоком долговременной памяти, блоками 10 сравнения непрерывных данных первичной, контрольной и эталонной информации, блоками 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации, входом 16 блока 12 окончательной аналитической обработки информации, блоком 13 исполнения аварийных действий.
Эти признаки известны из прототипа, и они позволяют выявить путем сравнения реальных параметров управления с контрольными и эталонными значениями этих параметров, а также по изменению особенностей вождения у водителя автомобиля ненормальное состояние и неадекватное поведение, не связанные с сонливостью, и провести анализ событий неадекватных состояний водителя, предрасполагающих к аварийным состояниям.
Состояние сонливости в прототипе выявляют, помимо всего прочего, по изменению физиологических функций организма водителя.
Предложенная система позволяет при минимальных вносимых в автомобиль изменениях и при минимальных ограничениях на манеру управления водителем автомобилем, определить состояния снижения внимания, сонливости и сна.
Следующие признаки являются новыми и позволяют при работе системы по снижению активности воздействия на органы управления автомобиля водителем надежно определить появление состояния снижения внимания, сонливости, потерю сознания или другие неадекватные состояния, опасные для процесса управления автомобилем, для этого система контроля состояния бодрствования водителя автомобиля дополнительно снабжена устройством 14 обработки дискретных данных, выход 15 которого электрически соединен со входом блока 9 математической обработки непрерывных данных системы 1, причем устройство 14 обработки дискретных данных выполнено в виде последовательно электрически соединенных, блоков 17 датчиков дискретных положений переключателей, блоков 18 сравнения данных первичной, контрольной и эталонной информации и аналитической обработки дискретных данных от датчиков дискретной информации, блока 19 аналитической обработки дискретных данных от датчиков дискретной информации.
Наличие действий водителя с разного рода переключателями, имеющими те или иные дискретные положения, например, такими как переключатель указателя поворота, положение рычага переключения передач механической коробки передач, позволяет сделать однозначный вывод об бодрствующем водителе и его адекватном управлении автомобилем. Особенно если имеется возможность сравнения производимых им действий с некоторым среднестатистическим набором действий необходимым и достаточным для управления автомобилем на данном участке за выбранный оптимальным образом промежуток времени. Такой набор действий назовем эталонным.
Набор действий может быть другим, зависящим от состояния окружающей среды, например, времени суток, сезона в году и погодных условий, но эти контрольные показатели могут меняться в достаточно широких пределах и учесть их изменения на все случаи жизни невозможно, а можно лишь предположить по каким расчетным коэффициентам может измениться число этих действий выбранных на основе средне статистического состояния, так как, например, трудно предсказать число встречных автомобилей, при встрече с которыми необходимо будет переключать ближний и дальний свет, и производить тому подобные действия.
По отсутствию или снижению двигательной активности ниже статистически необходимого предела можно сделать вывод об неадекватном состоянии водителя. Это необходимо, но недостаточно, для определения снижения двигательной активности водителя при его воздействии на органы управления автомобиля, так как это может быть обусловлено просто благоприятными условиями дорожного движения, такими как прямая, ровная, широкая дорога и благоприятная погода.
При этом устройство 6 обработки непрерывных данных дополнительно снабжено блоком 20 обработки контрольной информации, выход 21 которого соединен со входом 22 блока сравнения математически обработанных первичной, контрольной и эталонной информации непрерывных данных и, который выполнен в виде последовательно электрически соединенных блоков 23 датчиков первичной скорости вращения колес, блоков 24 математической обработки сигналов датчиков скорости вращения колес, блока 25 сравнения первичной, контрольной и эталонной информации о скорости вращения колес, блока 26 аналитической обработки непрерывных данных о скоростях взаимного вращения колес.
При этом каждый блок 9 математической обработки непрерывных данных снабжен дополнительным блоком 27 дифференцирования непрерывных данных для реальной первичной и эталонной информации непрерывных данных, каждый блок 10 сравнения непрерывных данных первичной, контрольной и эталонной информации снабжен дополнительным блоком 28 сравнения результатов дифференцирования реальной и эталонной информации, а каждый блок 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации снабжен дополнительным блоком 29 аналитической обработки и сравнения производных.
Очевидно, что любые непрерывно изменяющиеся параметры (из-за наличия в механизмах управления люфтов и свободного хода) имеют зону нечувствительности к управляющим непрерывным воздействиям водителя, в которой автомобиль под действием случайного дорожного микрорельефа, например, таких как колея, камешки, выбоины и т.п.изменяет случайным образом траекторию своего движения, по этой причине любое непрерывное действие водителя немного больше при изменении направления из-за необходимости выборки люфтов и преодоления зоны нечувствительности.
Для проверки наличия воздействий водителя на органы управления определяют, для каждого из них, производную по времени в виде временного ряда с учетом зоны нечувствительности и/или перекладки направления движения органов управления за тот же выбранный промежуток времени, за который и производились изменения дискретных действий. Величину каждой производной (с учетом знака или по модулю) в каждом блоке 10 сравнения непрерывных данных первичной, контрольной и эталонной информации, который снабжен дополнительным блоком 28 сравнения результатов дифференцирования реальной первичной и эталонной информации, сравнивают каждую производную с ее пороговым эталонным и/или контрольным значением для соответствующего непрерывно изменяющегося параметра. При отсутствии их соответствия определяют величину расхождения непрерывно изменяющихся параметров с эталонными и/или контрольными значениями и делают вывод о уровне аварийной ситуации и необходимой последовательности противоаварийных действий.
Очевидно, что производная по времени каждого непрерывно изменяющегося параметра должна быть меньше эталонного и/или контрольного значения, которое пороговым, то есть при этом параметр не должен меняться или быть в пределах случайного изменения (с учетом зоны нечувствительности), только тогда можно делать однозначный вывод об отсутствии воздействия водителя на органы управления автомобиля.
Эти признаки необходимы и достаточны для установления факта снижения двигательной активности водителя в сравнении со спонтанными изменениями состояния движения автомобиля и позволяют путем сравнения статистически необходимых действий водителя, определяемых дорожной обстановкой и другими условиями движения, с реально выполняемыми действиями водителя и объективными контрольными результатами этих действий.
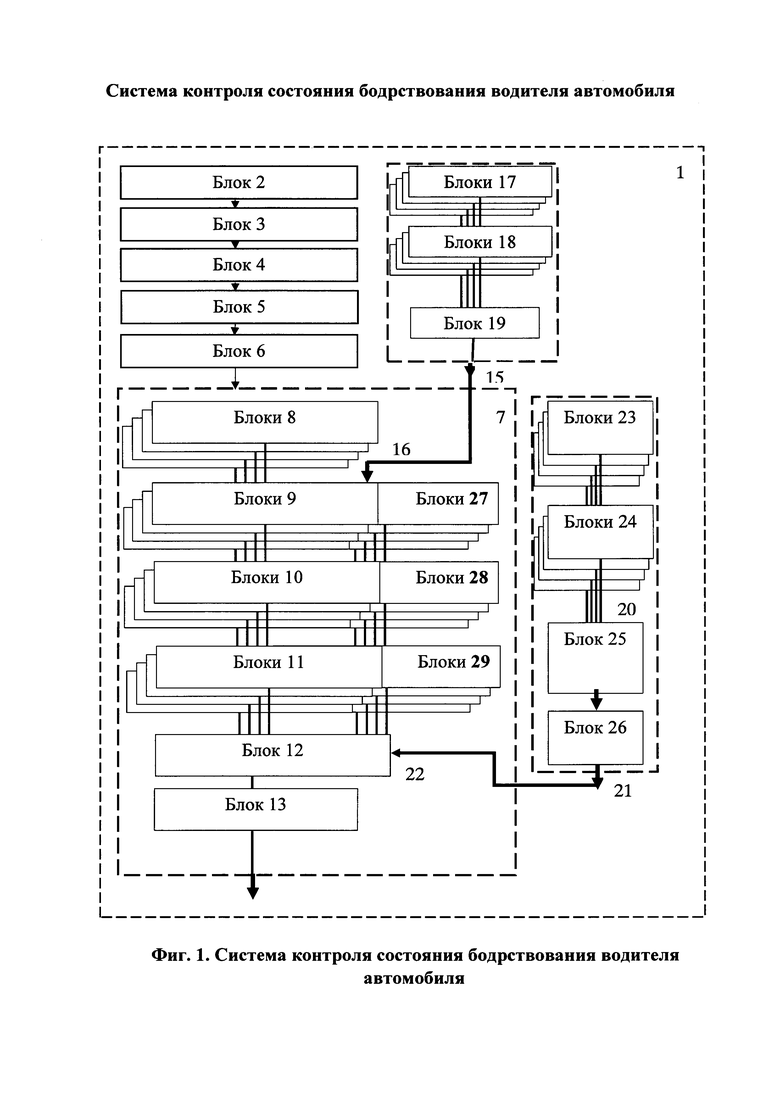
На фигуре показана функциональная схема системы контроля состояния бодрствования водителя автомобиля.
Система 1 контроля состояния бодрствования водителя автомобиля, содержит электрически соединенные:
блок 2 питания;
блок 3 долговременной памяти эталонной и контрольной информации; блок 4 настройки системы;
блок 5 контроля реальной дорожной обстановки;
блок 6 регистрации состояний водителя, предрасполагающих к аварийным состояниям;
устройство 7 обработки непрерывных данных с электрически соединенными:
блоками 8 датчиков первичной непрерывной и контрольной информации;
блоками 9 математической обработки непрерывных данных соответственно первичной, контрольной и эталонной информации, соединенными блоком 3 долговременной памяти;
блоками 10 сравнения непрерывных данных первичной, контрольной и эталонной информации;
блоками 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации;
блоком 12 окончательной аналитической обработки информации системы 1;
блоком 13 исполнения аварийных действий системы 1.
Система 1 контроля состояния бодрствования водителя автомобиля дополнительно снабжена устройством 14 обработки дискретных данных, выход 15 которого, электрически соединен со входом 16 блока 9 математической обработки непрерывных данных системы 1, причем устройство 14 обработки дискретных данных выполнено в виде последовательно электрически соединенных:
блоков 17 датчиков дискретных положений переключателей;
блоков 18 сравнения данных первичной, контрольной и эталонной информации и аналитической обработки дискретных данных от датчиков дискретной информации;
блока 19 аналитической обработки дискретных данных от датчиков дискретной информации.
Устройство 7 обработки непрерывных данных дополнительно снабжено блоком 20 обработки контрольной информации, выход 21 которого соединен со входом 22 блока 12 окончательной аналитической обработки информации системы 1, а блок 20 устройства 7, который выполнен в виде последовательно электрически соединенных:
блоков 23 датчиков первичной скорости вращения колес;
блоков 24 математической обработки сигналов датчиков скорости вращения колес;
блока 25 сравнения первичной, контрольной и эталонной информации о скорости вращения колес;
блока 26 аналитической обработки непрерывных данных о скоростях взаимного вращения колес.
Причем каждый блок 9 математической обработки непрерывных данных снабжен дополнительным блоком 27 дифференцирования непрерывных данных для реальной первичной и эталонной информации непрерывных данных, каждый блок 10 сравнения непрерывных данных первичной, контрольной и эталонной информации снабжен дополнительным блоком 28 сравнения результатов дифференцирования реальной и эталонной информации, а каждый блок 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации снабжен дополнительным блоком 29 аналитической обработки и сравнения производных.
Система работает следующим образом.
Система 1 контроля состояния бодрствования водителя автомобиля, содержит электрически соединенные:
блок питания 2, от которого все устройства и блоки системы 1 получают электрическое питание после включения системы;
блок 3 долговременной памяти эталонной и контрольной информации, который получает любым известным путем указанную информацию, например, через интернет по беспроводным системам связи, или эта информация закладывается перед началом движения из базы данных маршрутов движения, и эта информация является основой для сравнения и математической обработки;
блок 4 настройки системы, служит для задания последовательности работы устройств системы, задаваемой по желанию водителя, но без возможности отключения им всей системы контроля состояния бодрствования;
блок 5 контроля реальной дорожной обстановки может быть выполнен из любого известного набора датчиков аварийного сближения с движущимися или неподвижными автомобилями, являющимися объектами дорожного движения, и предназначен для экстренного оповещения водителя об аварийном сближении с указанными объектами;
блок 6 регистрации состояний водителя, предрасполагающих к аварийным состояниям, служит для регистрации всех аварийных или опасных состояний автомобиля, опасных действий или бездействия водителя за контрольный период и соответственно предназначен для целей последующего анализа и принятия решений по поводу аварийноопасных состояний. Контрольный период времени - это минимальный, выбираемый по условиям дорожного движения, необходимый и достаточный для выявления неадекватного состояния водителя, временной интервал. Такой период зависит от скорости движения автомобиля, состояния дорожного покрытия, погоды, времени года, части суток и других объективных факторов.
От блока 2 питания запитываются устройство 7 обработки непрерывных данных с соответственно электрически соединенными, блоками 8 датчиков первичной и контрольной информации, блоками 9 математической обработки непрерывных данных соответственно первичной, контрольной и эталонной информации, соединенными с блоком 3 долговременной памяти, блоками 10 сравнения непрерывных данных первичной, контрольной и эталонной информации, блоками 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации, блоком 12 окончательной аналитической обработки информации и блоком 13 исполнения аварийных действий системы 1.
При этом также запитываются в системе 1 контроля состояния бодрствования водителя автомобиля дополнительное устройство 14 обработки дискретных данных, выход 15 которого электрически соединен со входом 16 блока 9 математической обработки непрерывных данных системы 1.
Причем устройство 14 обработки дискретных данных выполнено в виде также электрически запитываемых от блока 2 питания последовательно электрически соединенных:
блоков 17 датчиков дискретных положений переключателей;
блоков 18 сравнения данных первичной, контрольной и эталонной информации и аналитической обработки дискретных данных от датчиков дискретной информации;
блока 19 аналитической обработки дискретных данных от датчиков дискретной информации.
Устройство 14 обработки дискретных данных в дальнейшем работает постоянно.
В устройстве 6 обработки непрерывных данных следующие дополнительные блоки запитываются от блока 2 питания и находятся в ждущем режиме. Блок 20 обработки контрольной информации, выход 21 которого соединен со входом 22 блока 12 окончательной аналитической обработки информации системы 1, и который выполнен в виде последовательно электрически соединенных:
блоков 23 датчиков первичной скорости вращения колес;
блоков 24 математической обработки сигналов датчиков скорости вращения колес;
блока 25 сравнения первичной, контрольной и эталонной информации о скорости вращения колес;
блока 26 аналитической обработки непрерывных данных о скоростях взаимного вращения колес.
А также от блока 2 питания запитываются и находятся ждущем режиме каждый блок 9 математической обработки непрерывных данных, который снабжен дополнительным блоком 27 дифференцирования непрерывных данных для реальной первичной и эталонной информации непрерывных данных, каждый блок 10 сравнения непрерывных данных первичной, контрольной и эталонной информации снабжен дополнительным блоком 28 сравнения результатов дифференцирования реальной первичной и эталонной информации, и каждый блок 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации, который снабжен дополнительным блоком 29 аналитической обработки и сравнения производных.
Возникновение предполагаемой аварийной ситуации диагностируется по отсутствию за контрольный период времени изменения дискретных состояний, передаваемых от датчиков к блокам 17 датчиков дискретных положений переключателей. Затем в работу включается блок 20 обработки контрольной информации, в котором по сигналам датчиков скорости вращения колес устанавливается движется автомобиль или находится в неподвижном состоянии. Если автомобиль движется, то по порядку взаимного движения колес устанавливается предполагаемый режим движения автомобиля, например, такой как прямолинейное движение, движение на повороте и т.д. На этом этапе может быть подан контрольный сигнал водителю, реакцией на который может быть любое его действие с дискретными или непрерывно работающими органами управления автомобиля, что переведет систему 1 в режим обработки только дискретной информации.
Указанные зависимости скоростей взаимного вращения колес широко известны и описаны в технической литературе, (например, см. книгу «Основы теории и конструкции автомобиля» авторы М.Д. Артамонов и др. М. «Машиностроение», 1974 г. Учебник для техникумов, раздел «Управляемость автомобиля», параграфы 2 «Условие качения управляемых колес без скольжения», 3 «Увод колеса и поворачиваемость автомобиля» и 4 «Соотношение углов поворота управляемых колес»), где на стр. 210-216 описывается наиболее сложный вариант качения при повороте с жесткими и эластичными шинами и описывается процесс взаимного вращения колес. Этот процесс не является предметом данной заявки и по этой причине не требует подробного описания.
Если подтверждается режим движения автомобиля, то в системе 1 контроля состояния бодрствования водителя автомобиля в устройстве 14 обработки дискретных данных вырабатывается сигнал, подаваемый на его выход 15 и передаваемый на вход 16 блока 9 математической обработки непрерывных данных системы 1. В действие вступает дополнительный блок 27 дифференцирования непрерывных данных для реальной первичной и эталонной информации непрерывных данных. В дополнительном блоке 28 сравнения результатов дифференцирования реальной первичной и эталонной информации. Затем приступают к анализу изменений для непрерывно изменяющихся параметров, для этого определяют для каждого из них производную по времени в виде временного ряда на ранее выбранном промежутке времени, величины которой, сравнивают с ее пороговым эталонным и/или контрольным значением для соответствующего непрерывно изменяющегося параметра, при отсутствии их соответствия в каждый из блоков 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации, который снабжен дополнительным блоком 29 аналитической обработки и сравнения производных, определяют величину расхождения непрерывно изменяющихся параметров с эталонными значениями и делают вывод об уровне аварийной ситуации и необходимой последовательности противоаварийных действий, причем величину анализируемого промежутка времени выбирают из условий, учитывающих скорость движения автомобиля и дорожные условия. Эти действия являются результатом сравнения всех полученных производных для всех непрерывных данных, при выявлении отсутствия их изменений блоком 12 окончательной аналитической обработки информации вырабатывается сигнал для включения в работу блока 13 исполнения аварийных действий системы 1, выполнение такого блока может быть самым разнообразным и он может включать множество вариантов действий, наиболее часто блок 13 исполнения аварийных действий системы 1 предназначается для действий, описанных ниже.
При выявлении отсутствия воздействия водителя на органы управления автомобиля за время контрольного измерения в блоке 13 исполнения аварийных действий в системе 1 последовательно активируется первый уровень противоаварийных действий, начиная со средств воздействия непосредственно на водителя внутри кабины автомобиля путем последовательных и/или одновременных тактильно-вибрационных, и/или звуковых, и/или прерывистых световых сигналов.
Если водитель не проснулся или потерял сознание, то блок 13 исполнения аварийных действий в системе 1 переходит ко второму уровню противоаварийных действий, состоящего в оповещении окружающих об неадекватном состоянии водителя и, предназначенном для уменьшения возможных последствий от неуправляемого движения автомобиля.
Ко второму уровню противоаварийных действий относят необходимую автоматическую подачу установленных Правилами дорожного движения аварийных сигналов светом и/или звуком и через блок 13 передачу аварийных сообщений экстренным службам, содержащих сведения об автомобиле, водителе и месте инцидента.
Если водитель не подает признаков активности, то противоаварийные действия продолжаются на третьем уровне, а блок 13 исполнения аварийных действий переходит к последнему третьему уровню противоаварийных действий, к которому относят воздействия на органы управления автомобиля, такие как принудительное автоматическое изменение положения акселератора, отключение круиз-контроля и активацию торможения.
Последовательность действий на этом уровне определяется уровнем автоматизации управления автомобилем. Минимальный из них принудительная остановка автомобиля в той полосе, в которой он движется.
ПЕРЕЧЕНЬ ПОЗИЦИЙ СИСТЕМЫ
1. Система 1 контроля состояния бодрствования водителя автомобиля, содержит электрически соединенные:
2. блок питания 2;
3. блок 3 долговременной памяти эталонной и контрольной информации;
4. блок 4 настройки системы;
5. блок 5 контроля реальной дорожной обстановки;
6. блок 6 регистрации состояний водителя, предрасполагающих аварийные состояния.
7. Устройство 7 обработки непрерывных данных с электрически соединенными:
8. блоками 8 датчиков первичной непрерывных и контрольной информации;
9. блоками 9 устройства 6 для математической обработки непрерывных данных соответственно первичной, контрольной и эталонной информации, соединенными блоком долговременной памяти;
10. блоками 10 сравнения непрерывных данных первичной, контрольной и эталонной информации устройства 7;
11. блоками 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации устройства 7;
12. блоком 12 окончательной аналитической обработки информации системы 1;
13. блоком 13 исполнения аварийных действий системы 1;
14. устройство 14 обработки дискретных данных,
15. выход 15 которого электрически соединен,
16. входом 16 блока 12 окончательной аналитической обработки информации системы 1;
17. блоками 17 датчиков дискретных положений переключателей устройства 14;
18. блоками 18 сравнения данных первичной, контрольной и эталонной информации и аналитической обработки дискретных данных от датчиков дискретной информации устройства 14;
19. блоком 19 аналитической обработки дискретных данных устройства 14
20. блоком 20 контрольной информации устройства 7
21. выход 21 которого блока 20 контрольной информации устройства 7 соединен,
22. со входом 22 блока окончательной аналитической обработки информации 12;
23. блоков 23 датчиков первичной скорости вращения колес блока 20 контрольной информации устройства 7,
24. блоков 24 математической обработки сигналов датчиков скорости вращения колес блока 20 контрольной информации устройства 7;
25. блоков сравнения первичной, контрольной и эталонной информации о скорости вращения колес блока 20 контрольной информации устройства 7,
26. блок 26 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации о скорости вращения колес для устройства 7 блока 20 контрольной информации
27. каждый блок 9 математической обработки непрерывных данных снабжен дополнительным блоком 27 дифференцирования непрерывных данных для реальной первичной, контрольной и эталонной информации непрерывных данных,
28. каждый блок 10 сравнения непрерывных данных первичной, контрольной и эталонной информации снабжен дополнительным блоком 28 сравнения результатов дифференцирования реальной и эталонной информации,
29. каждый блок 11 аналитической обработки непрерывных данных первичной, контрольной и эталонной информации снабжен дополнительным блоком 29 аналитической обработки и сравнения производных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ БОДРСТВОВАНИЯ ВОДИТЕЛЯ АВТОМОБИЛЯ | 2017 |
|
RU2686556C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СНОСА И ЗАНОСА КОЛЕС АВТОМОБИЛЯ | 2018 |
|
RU2702878C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2811997C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОПРОКИДЫВАНИЯ АВТОМОБИЛЯ | 2018 |
|
RU2702476C1 |
| Способ предотвращения сноса и заноса колёс системой помощи водителю автопоезда | 2023 |
|
RU2812000C1 |
| Способ непрерывного контроля психофизиологического состояния водителей, перевозящих опасные грузы и пассажиров по дорогам общего пользования, система, его реализующая, и блок обработки и управления, используемый в ней | 2015 |
|
RU2662293C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| УСОВЕРШЕНСТВОВАННЫЙ СПОСОБ С ИСПОЛЬЗОВАНИЕМ СИСТЕМЫ КОНТРОЛЯ ДАВЛЕНИЯ В ШИНАХ ЛЕГКОВЫХ АВТОМОБИЛЕЙ | 2013 |
|
RU2646779C2 |
Изобретение относится к автомобилестроению. Система контроля состояния бодрствования водителя автомобиля содержит электрически соединенные блоки: питания, долговременной памяти, настройки системы, контроля реальной дорожной обстановки, регистрации состояний водителя. Устройство обработки непрерывных данных с электрически соединенными блоками: датчиков первичных непрерывных данных, математической обработки непрерывных данных, сравнения непрерывных данных, аналитической обработки непрерывных данных, окончательной аналитической обработки информации, исполнения аварийных действий. Устройство обработки дискретных данных выполнено в виде электрически соединенных блоков: датчиков дискретных положений переключателей, сравнения данных, аналитической обработки дискретных данных. Устройство обработки непрерывных данных дополнительно снабжено блоком обработки контрольной информации, который выполнен в виде электрически соединенных блоков: датчиков первичной скорости вращения колес, математической обработки сигналов датчиков скорости вращения колес, сравнения скорости вращения колес, аналитической обработки непрерывных данных о скоростях взаимного вращения колес. Достигается своевременное и надежное обнаружение опасного состояния водителя. 1 ил.
Система контроля состояния бодрствования (1) водителя автомобиля, содержащая электрически соединенные:
блок питания (2);
блок долговременной памяти (3) эталонной и контрольной информации;
блок настройки системы (4);
блок контроля реальной дорожной обстановки (5);
блок регистрации состояний водителя (6), предрасполагающих к аварийным состояниям;
устройство обработки непрерывных данных (7) с электрически соединенными:
блоками датчиков первичных непрерывных данных и контрольной информации (8);
блоками математической обработки непрерывных данных (9) соответственно первичной, контрольной и эталонной информации, соединенными с блоком долговременной памяти (3);
блоками сравнения непрерывных данных (10) первичной, контрольной и эталонной информации;
блоками аналитической обработки непрерывных данных (11) первичной, контрольной и эталонной информации;
блоком окончательной аналитической обработки информации (12);
блоком исполнения аварийных действий (13) системы (1),
отличающаяся тем, что
система контроля состояния бодрствования (1) водителя автомобиля дополнительно снабжена устройством обработки дискретных данных (14), выход (15) которого электрически соединен с входом (16) блока математической обработки непрерывных данных (9) системы (1), причем устройство обработки дискретных данных (14) выполнено в виде последовательно электрически соединенных:
блоков датчиков дискретных положений переключателей (17);
блоков сравнения данных (18) первичной, контрольной и эталонной информации и аналитической обработки дискретных данных от датчиков дискретной информации;
блока аналитической обработки дискретных данных (19) от датчиков дискретной информации,
а устройство обработки непрерывных данных (6) дополнительно снабжено блоком обработки контрольной информации (20), выход (21) которого соединен с входом (22) блока окончательной аналитической обработки информации (12) системы (1) и который выполнен в виде последовательно электрически соединенных:
блоков датчиков первичной скорости вращения колес (23);
блоков математической обработки сигналов датчиков скорости вращения колес (24);
блока сравнения первичной, контрольной и эталонной информации о скорости вращения колес (25);
блока аналитической обработки непрерывных данных о скоростях взаимного вращения колес (26),
причем каждый блок математической обработки непрерывных данных (9) снабжен дополнительным блоком дифференцирования непрерывных данных (27) для реальной первичной и эталонной информации непрерывных данных,
каждый блок сравнения непрерывных данных (10) первичной, контрольной и эталонной информации снабжен дополнительным блоком сравнения результатов дифференцирования реальной первичной и эталонной информации (28),
а каждый блок аналитической обработки непрерывных данных (11) первичной, контрольной и эталонной информации снабжен дополнительным блоком аналитической обработки и сравнения производных (29).
| ГИДРАВЛИЧЕСКИЙ ДОМКРАТ ДЛЯ ВЫШКОМОНТАЖНЫХРАБОТ | 0 |
|
SU251186A1 |
| US 9663047 B2, 30.05.2017 | |||
| Устройство для выгрузки рельсов с подвижного состава и раскладки их на пути | 1947 |
|
SU83968A1 |
| Электроионитный способ очистки сточных вод от кремнефтористого натрия | 1961 |
|
SU146249A1 |

