Изобретение относится к автомобилестроению, в частности к способам и устройствам повышения активной безопасности транспортных средств и к системам объективного контроля движения автомобиля.
Одной из основных причин дорожно-транспортных происшествий является неудовлетворительное состояние водителя.
К числу главных факторов, вызывающих неудовлетворительное состояние водителя, относятся усталость, алкогольное или наркотическое опьянение, обострение хронических заболеваний, стрессовые ситуации и др. состояния, приводящие к утрате внимания и даже потере сознания.
В мировой практике накоплен значительный опыт по созданию систем мониторинга состояния водителя. Принцип их действия основан на измерении определенных физиологических параметров состояния водителя: частоты пульса, артериального давления, частоты дыхания, положения головы, состояния зрачков глаз, частоты мерцания век, температуры участков тела, электропроводность кожи рук и т.д.
Задача контроля состояния бодрствования водителя состоит в обнаружении опасных состояний водителя на ранних стадиях их возникновения, формировании пробуждающих сигналов или сигналов повышенной опасности и, в случае необходимости, выполнения программы противоаварийной принудительной остановки транспортного средства.
Особенностью органов управления автомобиля является то, что они находятся в постоянном контакте с водителем. Снижение двигательной активности водителя, например, при засыпании в движении, потере сознания, неадекватных состояниях, сопровождается неизменяемым состоянием органов управления.
Известен способ работы устройства контроля состояния водителя (См. патент на полезную модель РФ №RU 83968 U, заявитель Открытое акционерное общество "Завод "Автоприбор", опубл. 27.06.2009), в котором описывается способ контроля состояния водителя по его характерным позам при засыпании, в том числе по положению головы.
Недостатком является то, что в полусонном состоянии водитель практически не меняет своей позы, но утрачивает контроль за окружающей обстановкой, что указанный способ не может своевременно выявить.
Известен способ контроля состояния водителя транспортного средства, (см. патент РФ №RU 2413632, заявитель Учреждение Российской академии наук Центр информационных технологий в проектировании РАН (RU), опубл. 10.03.2011), в котором производят измерение параметров действий водителя, анализируют изменение состояния, сравнивая их с эталонными значениями, по результатам которого определяют уровень аварийной ситуации и последовательность действий для ее устранения
Основным недостатком известного способа является определение состояния водителя по его глазам при освещении разными источниками света, в том числе инфракрасного, что в условиях постоянных вибраций автомобиля является сложным малоинформативным процессом, так как требует сложного анализа изображений.
Известен способ контроля состояния водителя транспортного средства, (см. патент РФ №RU 2257616, заявитель Журкович Виталий Владимирович (RU), Рыбкин Леонид Всеволодович (RU), Сергеева Валентина Георгиевна (RU), опубл. 27.07.2005), в котором производят измерение параметров действий водителя, анализируют изменение состояния автомобиля, сравнивая их с эталонными значениями, по результатам которого определяют уровень аварийной ситуации и последовательность действий для ее устранения.
Основным недостатком известного способа является контроль за управлением водителя автомобилем по его характеристике движения на дороге внешней системой, расположенной на дороге, что затрудняет процесс оповещения водителя при нарушении им порядка движения на дороге.
Известен способ контроля бодрствования водителя транспортного средства, (см. патент РФ №RU 2573863 С1, заявитель Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Донской государственный аграрный университет", опубл. 27.01.2016, ссылка на Attention Assist of Mercedes-Benz. (Движение без СНА). MeinLand.-1.6.2011.), в котором описан, в качестве аналога, способ, в котором датчиками контролируются несколько десятков показателей физиологических параметров состояния водителя, и на их основе, делается вывод о неадекватных действиях конкретного водителя. А затем, делается вывод о возможности перехода в аварийные состояния и принимаются меры по их предотвращению.
Недостатком известного способа является значительное количество источников независимой информации, требующей достаточно сложной обработки для его реализации.
Известен способ контроля состояния водителя транспортного средства, (см. опубликованную заявку США №US 2015211868 А1, заявитель NISSAN MOTOR CO., LTD, THE UNIVERSITY OF TOKYO, опубл. 30.07.2015), в котором производят измерение телеметрических значений параметров движения автомобиля и действий с органами управления автомобиля на различных участках. Это могут быть временные интервалы, пространственные участки дороги по долготе и широте местоположения и т.п. Телеметрические значения параметров движения автомобиля, например, воздействия на органы управления автомобиля, а также полученные с камеры видеонаблюдения изображения окружающей среды, которые формируются во временные ряды, позволяют анализировать изменение состояния водителя, в том числе, его физиологические параметры, по результатам которого определяют уровень аварийной ситуации и последовательность действий для ее устранения.
Основным недостатком известного способа является сложный анализ изображений внешней обстановки и действий водителя методом иерархической кластеризации сегментированных данных вождения во времени.
Известен способ контроля состояния водителя транспортного средства, (см. патент США №US 7672764, заявитель DENSO CORPORATION, опубл. 02.03.2010), в котором производят измерение параметров движения автомобиля и воздействий водителя на органы управления автомобиля, за выбранный промежуток времени, анализируют изменение состояния, сравнивая их с эталонными значениями, по результатам которого, определяют уровень аварийной ситуации и последовательность действий для ее устранения. При этом анализируются все выявленные аварийные ситуации.
Основным недостатком является анализ ошибок управления водителя по результатам выполненных действий с последующей статистической обработкой результатов. Это достаточно сложно и требует больших затрат времени и ресурсов.
Известен способ контроля состояния водителя транспортного средства, (см. патент (опубликованную заявку) США №US9663047 В2, заявитель FICO MIRRORS, S.A, и авторы, опубл. 30.05.2017), в котором производят измерение параметров движения автомобиля и воздействий водителя на органы управления автомобиля за выбранный промежуток времени, анализируют изменение состояния, сравнивая их с эталонными значениями, по результатам сравнения которых определяют уровень аварийной ситуации и последовательность действий для ее устранения.
Основным недостатком известного способа контроля состояния водителя транспортного средства является сложность его реализации, так как приходиться сравнивать и анализировать состояние множества датчиков физиологического состояния водителя, его поведения и движения автомобиля с их эталонными усредненными значениями.
Этот способ имеет наибольшее число совпадающих действий и аналогичную, решаемую изобретением техническую задачу, и принимается в качестве наиболее близкого аналога, то есть прототипа.
Как известно, в наиболее общем смысле, задача контроля состояния бодрствования водителя состоит в обнаружении опасных состояний водителя на ранних стадиях их возникновения, формировании пробуждающих сигналов или сигналов повышенной опасности, и, в случае необходимости, выполнения программы безаварийной принудительной остановки транспортного средства.
При описании последовательности действий в способе следует разъяснить следующие термины.
К эталонным действиям водителя автомобиля относят все действия, параметры которых можно предусмотреть и заранее заложить в программу контроля, например, таких как полученных на основе статистически усредненных значений для выбранного водителем маршрута движения.
К дискретно изменяемым параметрам оценки действий водителя автомобиля относят любые действия водителя с устройствами автомобиля, имеющими, по меньшей мере, два положения, такие как включено-выключено или любые другие дискретные положения переключателей, например, положение рычага механической коробки переключения передач.
К безусловным контрольным дискретно изменяемым параметрам оценки действий водителя автомобиля относят любые действия водителя с устройствами автомобиля, которые водитель должен выполнять в соответствии с инструкцией автомобиля, например, для устранения возможности перегрева двигателя по указанной инструкции большинства грузовых автомобилей запрещено двигаться на первой передаче более минуты после трогания и начала движения. К безусловным контрольным дискретно изменяемым параметрам оценки действий водителя автомобиля также относят действия водителя, которые он должен выполнять по неизменяемым во времени и пространстве условиям, например, таким как рельеф местности и/или форма дорожного полотна со всеми поворотами уклонами и подъемами.
К условным контрольным дискретно изменяемым параметрам оценки действий водителя автомобиля относят действия водителя, которые он должен выполнять по изменяемым во времени и пространстве условиям, таким как вызванным, например, изменением дорожной разметки или установкой дорожных знаков, регулирующих порядок движения, расположения или проезда участков дороги, например, при ее ремонте.
К контрольному уровню противоаварийных действий относят действия, которые проводят для проверки состояния водителя при отсутствии действий водителя, например, при благоприятных погодных и дорожных условиях, таких как прямая, сухая, широкая дорога и при ясном небе в дневное время. Эталонные значения воздействий водителя на органы управления автомобиля за выбранный промежуток времени так же могут быть минимальными. При этом практически нет необходимости изменения воздействий водителя на органы управления автомобиля в течение достаточно длительного периода времени, по этой причине возникает необходимость в периодическом соответствующем формировании сигналов водителю для подтверждения его двигательной активности путем изменения воздействий на органы управления, например, при этом зажигается световой контрольный сигнал, для выключения которого необходимо любое изменение параметров воздействий водителя на органы управления автомобиля, например, кратковременное снижение давления на педаль акселератора. Это действие повышает эффективность выявления сонного или другого неадекватного состояния водителя.
В данном предложении, техническая задача, на решение которой направлено предлагаемое изобретение, состоит в своевременном и надежном обнаружении опасного состояния водителя, выражающегося в опасном снижении его двигательной активности, вследствие возникновения сонного состояния и засыпания, путем автоматического контроля как за параметрами воздействий водителя на органы управления автомобиля, так и за параметрами движения автомобиля, требующими постоянного взаимодействия, анализ их изменения во времени при сравнении их состояния с эталонными значениями, необходимый для формирования и выявления временной последовательности сигналов опасного состояния, по результатам которого определяют уровень аварийной ситуации и последовательность действий для ее устранения.
Поставленная техническая задача решается тем, что в способе контроля состояния бодрствования водителя автомобиля производят измерение параметров движения автомобиля и воздействий водителя на органы управления автомобиля за выбранный промежуток времени, сравнивают изменение их состояния с эталонными значениями, анализируют изменение их состояния, по результатам которого, определяют уровень аварийной ситуации и последовательность действий для ее устранения. Эта обобщенная последовательность действий известна из прототипа и позволяет выявить не нормальное поведение водителя.
Новыми являются следующие действия.
Вначале сравнение проводят для дискретно изменяемых параметров оценки действий водителя, причем к дискретно изменяемым параметрам оценки действий водителя автомобиля относят любые действия водителя автомобиля с его устройствами, имеющими, по меньшей мере, два положения включено-выключено или любые другие дискретные положения переключателей, при этом определяют наличие или отсутствие действий за выбранный промежуток времени и соответствие их безусловному и контрольно-условному набору действий, причем к безусловным дискретно изменяемым параметрам оценки действий водителя автомобиля относят действия водителя, которые должны быть выполнены в соответствии с неизменяемыми условиями инструкции по эксплуатации автомобиля и дорожной обстановки, к контрольно-условным, дискретно изменяемым, параметрам оценки действий относят действия водителя, которые должны быть выполнены в соответствии с условиями состояния окружающей среды, такими как, дорожные и погодные условия, а при отсутствии действий водителя приступают к анализу изменений для непрерывно изменяющихся параметров, для этого определяют для каждого из них производную по времени в виде временного ряда на выбранном промежутке времени, величину которой сравнивают с ее пороговым эталонным и/или контрольным значением для соответствующего непрерывно изменяющегося параметра, при отсутствии их соответствия определяют величину расхождения непрерывно изменяющихся параметров с эталонными значениями и делают вывод об уровне аварийной ситуации и необходимой последовательности противоаварийных действий, причем величину анализируемого промежутка времени выбирают из условий, учитывающих скорость движения автомобиля и дорожные условия.
К дискретно изменяемым параметрам оценки действий водителя автомобиля относят любые действия водителя автомобиля с его устройствами, имеющими, по меньшей мере, два положения включено-выключено или любые другие дискретные положения переключателей, например, положения переключателя указателей поворота, имеющего три положения: нейтральное, поворот влево и поворот вправо, положение рычага переключения коробки переключения передач (КПП) по числу передач и т.д.
К дискретно изменяемым параметрам оценки действий водителя автомобиля относят любые действия водителя автомобиля с его устройствами относят безусловные и условные контрольные наборы действий.
К безусловным дискретно изменяемым параметрам оценки действий водителя автомобиля относят действия, которые должны им быть выполнены в соответствии с неизменяемыми условиями инструкции по эксплуатации автомобиля и дорожной обстановки, например, такие как переключение магистралей питания топливом с пустого бака на полный или передачи в коробке перемены передач в соответствии с инструкцией по эксплуатации и требуемыми дорожными условиями соответственно на более высокую при движении на ровной дороге и на пониженную при движении в гору. В противном случае возможны аварийные ситуации, такие как прекращение подачи топлива или перегрузка двигателя по требуемому для движения вращающему моменту, необходимому для беспребойного движения в гору, что приведет к его остановке и аварийной остановке автомобиля.
К условным контрольным дискретно изменяемым параметрам оценки действий водителя автомобиля относят действия, которые должны быть им выполнены в соответствии с изменяемыми условиями состояния окружающей среды, такими как, дорожные и погодные условия, например, при наступлении ночи и отсутствии встречного транспорта водитель должен в соответствии с должностной инструкцией по безопасной эксплуатации автомобиля и требованиями Правил дорожного движения включить «дальний свет», а при появлении встречного транспорта переключить на «ближний свет», но можно этого не делать и создать аварийно опасную ситуацию, но при этом автомобиль может продолжать перемещение без изменения режима движения.
При этом к непрерывно изменяющимся параметрам, относят положение акселератора, тормозной педали и рулевого колеса, имеющие два крайних положения, соответственно минимальное и максимальное, а также непрерывное множество промежуточных. Положение рулевого колеса из непрерывно изменяющихся параметров движения автомобиля и воздействий водителя на органы управления автомобиля является наименее информативным и может находиться под воздействием случайных факторов на дорожном полотне, например, таких как колейность, неровности дороги и т.п., по этой причине обычно не включается в процесс рассмотрения.
Далее, как в прототипе, после измерения параметров движения автомобиля и параметров воздействий водителя на органы управления автомобиля за выбранный промежуток времени, сравнения изменения их состояния с эталонными значениями, анализируют изменения состояния, и выявляют необходимость в тех или иных противоаварийных действиях. Эти воздействия вводятся последовательно от минимального, информационного для водителя уровня до максимального, блокирующего дальнейшее движение автомобиля путем автоматической принудительной остановки. Таких уровней можно выбрать любое число, но минимальным числом будет один.
Последовательности любых противоаварийных действий предшествует контрольный уровень, соответствующий формированию сигналов водителю для подтверждения его двигательной активности путем изменения воздействий на органы управления автомобиля.
К первому уровню противоаварийных действий относят средства воздействия на водителя. Первый уровень, соответствующий информированию водителя об его опасном состоянии, определяемом по параметрам движения автомобиля, предназначен для использования только внутри кабины. Такими действиями могут быть, выбранные в любой последовательности, прерывистые световые сигналы, формируемые известными средствами, расположенными на панели управления или в любом другом, заранее выбранном месте кабины, звуковые сигналы, с любыми заданными постоянными или переменными тембром, частотой и силой звука, или тактильно-вибрационные воздействия на водителя.
Если они не принесли результата, выражающегося в изменении воздействия водителя на органы управления, то есть переходу управления автомобилем к водителю, активируют второй уровень, выражающийся в оповещении окружающих о неадекватном состоянии водителя и предназначенный для уменьшения возможных последствий от неуправляемого движения автомобиля.
Противоаварийные действия, такие как, воздействия на органы управления автомобиля относятся к третьему уровню. Эти действия должны уменьшить возможные аварийные последствия от неуправляемого движения автомобиля, такие как столкновения с другими автомобилями и препятствиями на дороге, для этого принудительно автоматически изменяют положение акселератора с целью снижения скорости движения и отключают круиз-контроль (при наличии) и активируют тормоза.
К третьему уровню противоаварийных действий также относят автоматическую принудительную остановку автомобиля. При этом действия по остановке автомобиля в наиболее простом варианте могут происходить в полосе движения, или, в зависимости от уровня автоматизации, с отведением автомобиля на обочину или в аварийный карман скоростной трассы.
Очевидно, что вышеуказанные противоаварийные действия, должны сопровождаться автоматической подачей установленных Правилами дорожного движения аварийных световых и звуковых сигналов и принудительной передачей аварийных сообщений экстренным службам об аварийно-опасном движении автомобиля.
Кроме этого все вышеуказанные признаки в совокупности позволяют достичь следующие технические результаты.
В способе контроля состояния бодрствования водителя автомобиля, в котором производят измерение параметров движения автомобиля и воздействий водителя на органы управления автомобиля за выбранный промежуток времени, сравнивают изменение их состояния с эталонными и/или контрольными значениями, что позволяет зафиксировать снижение двигательной активности водителя автомобиля, анализируют изменение их состояния, по результатам чего, определяют уровень аварийной ситуации и последовательность действий для ее устранения.
При этом выше указанные действия проводят для дискретно изменяемых параметров оценки действий водителя, то есть определяют наличие или отсутствие действий указанного типа за выбранный промежуток времени и соответствие их эталонному или контрольному и контрольно-условному набору действий. Эта последовательность действий, в общем случае, однозначно позволяет установить опасное снижение двигательной активности водителя за выбранный промежуток времени.
Непрерывно изменяющиеся параметры (из-за наличия в механизмах управления люфтов и свободного хода) имеют зону нечувствительности к управляющим непрерывным воздействиям водителя, в которой автомобиль под действием случайного дорожного микро рельефа, например, таких как колея, камешки, выбоины и т.п. изменяет случайным образом траекторию своего движения, по этой причине любое непрерывное действие водителя немного больше при изменении направления из-за необходимости выборки люфтов и преодоления зоны нечувствительности.
Для проверки наличия действий водителя с устройствами управления непрерывного действия определяют для каждого из них производную с учетом зоны (нечувствительности и/или перекладки направления движения) по времени за тот же выбранный промежуток времени, что и производились изменения дискретных действий, величину каждой производной (с учетом знака или по модулю), которую сравнивают с ее пороговым эталонным и/или контрольным значением для соответствующего непрерывно изменяющегося параметра, при отсутствии их соответствия, определяют величину расхождения непрерывно изменяющихся параметров с эталонными значениями и делают вывод о уровне аварийной ситуации и необходимой последовательности противоаварийных действий, причем величину анализируемого промежутка времени выбирают из условий, учитывающих скорость движения автомобиля и дорожные условия. По значениям производных из временного ряда на выбранном промежутке времени возможно выявить момент отсутствия или минимального изменения воздействия водителя на органы управления автомобиля. Для этого достаточно выявить момент постоянства или снижения значений производных непрерывно изменяющихся параметров ниже порогового.
Очевидно, что производная по времени каждого непрерывно изменяющегося параметра должна быть меньше эталонного и/или контрольного значения, которое является пороговым, то есть при этом параметр не должен меняться или быть в пределах случайного изменения (с учетом зоны нечувствительности), только тогда можно делать вывод об отсутствии воздействия водителя на органы управления автомобиля.
При этом совместно с аналогичным контролем положения органов управления и их производных по времени можно сделать однозначный вывод об отсутствии воздействия водителя на органы управления автомобиля, а следовательно, и о снижении внимания, сонном или дремотном состоянии водителя.
Последовательности любых противоаварийных действий предшествует контрольный уровень, соответствующий формированию контрольных сигналов водителю для последующего подтверждения его двигательной активности путем изменения воздействий на органы управления автомобиля.
При выявлении отсутствия изменений воздействий водителя на органы управления автомобиля за время контрольного измерения последовательно активируют первый уровень противоаварийных действий, начиная со средств воздействия непосредственно на водителя внутри кабины автомобиля путем последовательных и/или одновременных тактильно-вибрационных, и/или звуковых, и/или прерывистых световых сигналов.
Если водитель не проснулся или потерял сознание, то активируют второй уровень, выражающийся в оповещении окружающих о неадекватном состоянии водителя и предназначенный для уменьшения возможных последствий от неуправляемого движения.
Ко второму уровню противоаварийных действий относят необходимую автоматическую подачу установленных Правилами дорожного движения аварийных сигналов светом и/или звуком и передачу аварийных сообщений экстренным службам.
Если водитель не подает признаков активности, то переходят к последнему третьему уровню противоаварийных действий, к которому относят воздействие на органы управления автомобиля, такие как принудительное автоматическое изменение положения акселератора, отключение круиз-контроля и активацию торможения. Если коробка переключения передач механическая, то на включенной передаче, достаточно снизить подачу топлива и автомобиль начнет тормозить двигателем.
Способ поясняется чертежом.
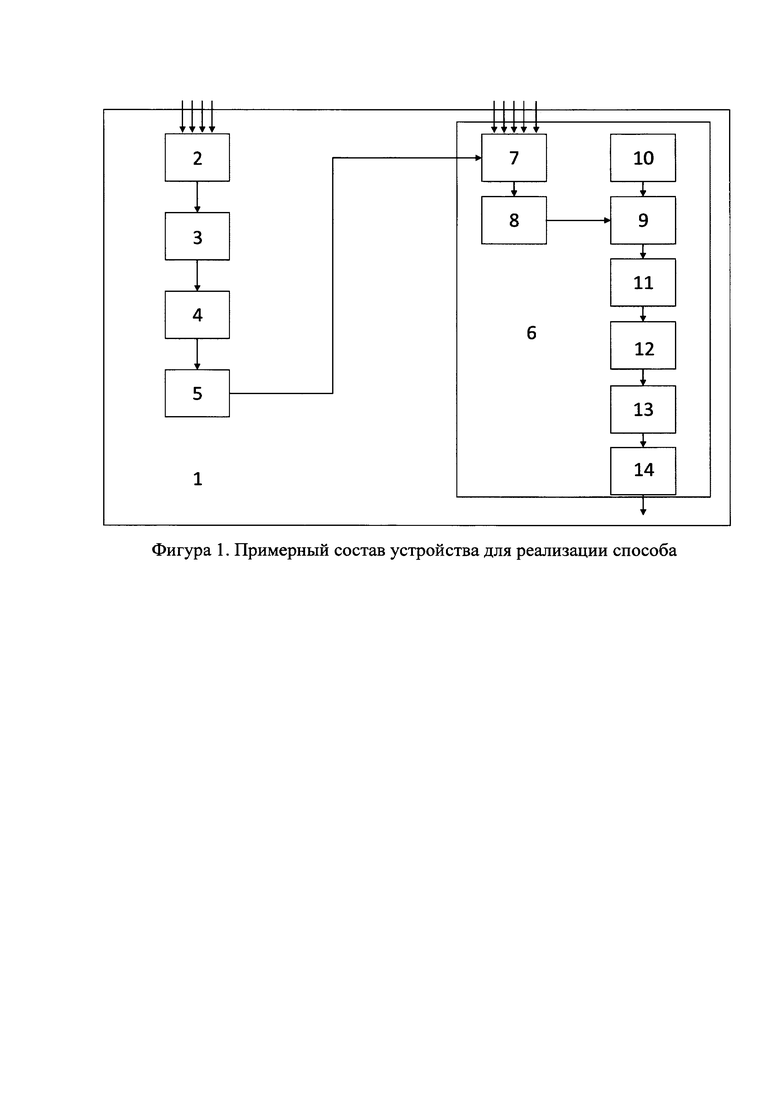
На фигуре 1 показан примерный состав устройства для реализации способа.
Для реализации способа в указанной выше последовательности действий необходимо автоматическое устройство сбора информации, вычисления параметров, анализа и управления.
Устройство 1 может быть реализовано множеством известных в технике стандартных блоков сбора информации, последовательного расчета, вычисления параметров и их производных, анализа их значений, логических действий с получением результатов и исполнительными механизмами для их выполнения.
Устройство 1 включает блок 2 сбора информации об устройствах с дискретно изменяемыми параметрами за эталонный отрезок времени. Это могут быть переключатели габаритных, стояночных огней, ближнего и дальнего света, указателей поворота, изменения положения рычага механической коробки передач с индикацией каждой из передач от низшей до высшей, режима работы стеклоочистителей и омывателя стекла и т.п., а изменение положения каждого устройства с дискретными параметрами положения передается на блок 3 анализа действий с устройствами, имеющими дискретные параметры положения.
Далее устройство содержит блок 4 сравнения действий и положений устройств, имеющих дискретные параметры положения, соответственно с соответствующим контрольным набором безусловных и условных контрольных действий и положений. Логический блок 5 служит для выработки команды на запуск устройства 6 анализа изменений для непрерывно изменяющихся параметров, которое включает блок 7 сбора информации о непрерывно изменяющихся параметрах, блок 8 расчета производных по времени для непрерывно изменяющихся параметров, блока 9 сравнения каждого параметра и его производной с эталонным и/или контрольным значением для соответствующего непрерывно изменяющегося параметра и его производной, поступающими из блока 10 хранения эталонных и/или контрольных значений параметров и их производных для каждого непрерывно изменяющегося параметра, блока 11 анализа и контрольного уровня, блока 12 выработки аварийных команд, блока 13 исполнения аварийных действий соответственно первого второго и третьего уровня и блок 14 передачи аварийных сообщений экстренным службам.
Устройство для реализации способа контроля состояния бодрствования водителя автомобиля работает в следующей последовательности.
Устройство для реализации способа контроля состояния бодрствования водителя автомобиля в блоке 2 сбора информации об устройствах с дискретно изменяемыми параметрами за эталонный отрезок времени, проводит сбор информации о каждом переключении приборов и устройств указанного типа. Затем в блоке 3 анализа действий с устройствами, имеющими дискретные положения, проводят сравнение каждого выше указанного действия для дискретно изменяемых параметров оценки действий водителя, то есть определяют наличие или отсутствие действий указанного типа за выбранный промежуток времени и соответствие их безусловному (эталонному или контрольному) и контрольно-условному набору действий, которые должны быть произведены водителем на анализируемом участке дороги за выбранный эталонный отрезок времени. В блоке 4 сравнения реальных действий и положений устройств, имеющих дискретные параметры положения, сравнивают реальную последовательность действий с необходимым и достаточным набором действий, соответствующим безусловному (эталонному или контрольному) и контрольно-условному набору действий. Все указанные действия с дискретно изменяемыми параметрами должны сравниваться со статистически обоснованным набором действий, который должен учитывать наличие статически неизменяемой дорожной обстановки, так, например, изменение рельефа дороги и наличие ограничений на скоростной режим приведет к необходимости переключения передач в коробке переключения передач, которые являются безусловно необходимыми действиями, а динамически изменяемая дорожная обстановка приводит к необходимости дискретных переключений, например, появление встречного транспорта требует контрольно-условного действия по переключению ближнего, дальнего и противотуманного света из-за появления тумана или дождя, обгон или объезд попутного автомобиля в соответствии с Правилами дорожного движения и т.п. это является первым признаком утраты внимания или появления сонного состояния у водителя. В логическом блоке 5 при отсутствии действий водителя вырабатывается команда на запуск устройства 6 анализа изменений для непрерывно изменяющихся параметров.
Эта последовательность действий в общем случае позволяет установить снижение двигательной активности водителя.
При отсутствии или уменьшении ниже необходимого статистически обоснованного минимума указанных действий водителя от команды блока 5 в устройстве 6 анализа изменений для непрерывно изменяющихся параметров запускается программа их измерения и анализа.
Для проверки наличия действий водителя с устройствами управления непрерывного действия в блоке 7 собирают информацию о всех непрерывно изменяющихся параметрах, а в блоке 8 определяют для каждого параметра производную с учетом зоны (нечувствительности и/или перекладки направления движения) по времени за тот же выбранный промежуток времени, за который производились измерения изменений дискретных действий. В блоке 9 сравнения величину каждой производной (с учетом знака или по модулю) сравнивают с ее пороговым эталонным и/или контрольным значением для соответствующего непрерывно изменяющегося параметра, которые извлекаются из блока 10 хранения эталонных и/или контрольных значений параметров и их производных. В блоке 11 анализа при отсутствии их соответствия определяют величину расхождения непрерывно изменяющихся параметров с эталонными значениями. Выработке аварийной команды предшествует контрольный уровень в блоке 11, соответствующий формированию контрольных сигналов водителю для выполнения или подтверждения его двигательной активности путем изменения воздействий на органы управления автомобиля. При отсутствии реакции водителя на этот сигнал в блоке 12 вырабатывается аварийная команда и передается в блок 13 исполнения противоаварийных действий соответственно первого, второго и третьего уровня. При этом по величине несоответствия производных непрерывно изменяющихся параметров эталонным и/или контрольным значениям делают вывод об уровне аварийной ситуации и необходимой последовательности противоаварийных действий, причем величину анализируемого промежутка времени выбирают из условий, учитывающих скорость движения автомобиля и дорожные условия, которые поступают из блока 10 хранения эталонных и/или контрольных значений параметров и их производных.
Производная по времени каждого непрерывно изменяющегося параметра должна быть больше эталонного и/или контрольного значения, но меньше порогового, то есть при этом параметр не должен меняться или быть в пределах случайного изменения (с учетом зоны нечувствительности), тогда можно делать вывод о отсутствии воздействия водителя на органы управления автомобиля.
При выявлении отсутствия воздействия водителя на органы управления автомобиля за время контрольного измерения в блоке 13 исполнения аварийных действий последовательно активируется первый уровень противоаварийных действий, начиная со средств воздействия непосредственно на водителя внутри кабины автомобиля путем последовательных и/или одновременных тактильно-вибрационных, и/или звуковых, и/или прерывистых световых сигналов.
Если водитель не проснулся или потерял сознание, то блок 13 исполнения аварийных действий переходит ко второму уровню противоаварийных действий, состоящего в оповещении окружающих о неадекватном состоянии водителя и, предназначенном для уменьшения возможных последствий от неуправляемого движения.
Ко второму уровню противоаварийных действий относят необходимую автоматическую подачу установленных Правилами дорожного движения аварийных сигналов светом и/или звуком и через блок 14 передачу аварийных сообщений экстренным службам, содержащих сведения об автомобиле, водителе и месте инцидента.
Если водитель не подает признаков активности, то противоаварийные действия продолжаются на третьем уровне, а блок 13 исполнения аварийных действий переходит к последнему третьему уровню противоаварийных действий, к которому относят воздействия на органы управления автомобиля, такие как принудительное автоматическое изменение положения акселератора, отключение круиз-контроля и активацию торможения. Последовательность действий на этом уровне определяется уровнем автоматизации управления автомобилем. Минимальный из них принудительная остановка автомобиля в той полосе, в которой он движется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ БОДРСТВОВАНИЯ ВОДИТЕЛЯ АВТОМОБИЛЯ | 2017 |
|
RU2671891C1 |
| СПОСОБ КОНТРОЛЯ УРОВНЯ БОДРСТВОВАНИЯ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА В РЕЙСЕ | 2021 |
|
RU2771082C1 |
| Способ управления движением автомобильной техники в составе колонны с учетом состояния опорной поверхности, рельефа и кривизны маршрута | 2022 |
|
RU2790889C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ПЕРЧАТКА ДЛЯ ВОДИТЕЛЯ ТРАНСПОРТА, ПРЕПЯТСТВУЮЩАЯ ДРЕМОТЕ ЗА РУЛЕМ | 2011 |
|
RU2455694C1 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| Способ непрерывного контроля психофизиологического состояния водителей, перевозящих опасные грузы и пассажиров по дорогам общего пользования, система, его реализующая, и блок обработки и управления, используемый в ней | 2015 |
|
RU2662293C2 |
| Система контроля работоспособности экипажа автомобиля для перевозки специальных грузов | 2018 |
|
RU2704647C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ВОЕННОЙ АВТОМОБИЛЬНОЙ ТЕХНИКИ В СОСТАВЕ КОЛОННЫ С УЧЁТОМ СОСТОЯНИЯ ОПОРНОЙ ПОВЕРХНОСТИ | 2020 |
|
RU2746046C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2018128C1 |
| Способ обучения приемам управления четырехколесным внедорожным мототранспортным средством (квадроциклом) и тренажер для его реализации | 2024 |
|
RU2830015C1 |
Изобретение относится к автомобилестроению, в частности к способам повышения активной безопасности транспортных средств. В способе контроля состояния бодрствования водителя автомобиля производят измерение параметров движения автомобиля и воздействий водителя на органы управления автомобиля за выбранный промежуток времени и сравнивают изменение их состояния с эталонными значениями. При этом вначале сравнение проводят для дискретно изменяемых параметров оценки действий водителя, при отсутствии действий водителя приступают к анализу изменений для непрерывно изменяющихся параметров, который сравнивают с ее пороговым эталонным и/или контрольным значением для соответствующего непрерывно изменяющегося параметра, при отсутствии их соответствия определяют величину расхождения непрерывно изменяющихся параметров с эталонными значениями и делают вывод об уровне аварийной ситуации. Достигается своевременное и надежное обнаружение опасного состояния водителя, находящегося в кабине движущегося автомобиля. 8 з.п. ф-лы, 1 ил.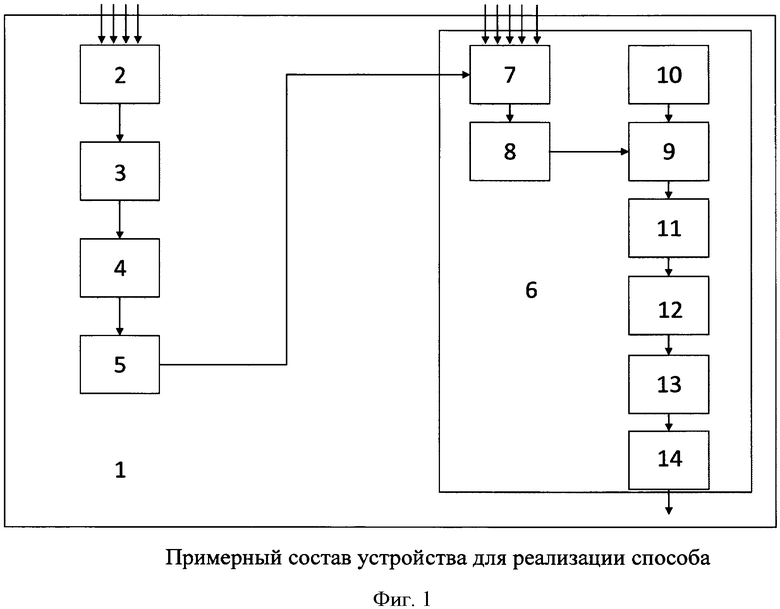
1. Способ контроля состояния бодрствования водителя автомобиля, в котором производят измерение параметров движения автомобиля и воздействий водителя на органы управления автомобиля за выбранный промежуток времени, сравнивают изменение их состояния с эталонными значениями, анализируют изменение их состояния, по результатам которого определяют уровень аварийной ситуации и последовательность действий для ее устранения, отличающийся тем, что вначале сравнение проводят для дискретно изменяемых параметров оценки действий водителя, причем к дискретно изменяемым параметрам оценки действий водителя автомобиля относят любые действия водителя автомобиля с его устройствами, имеющими по меньшей мере два положения включено-выключено или любые другие дискретные положения переключателей, при этом определяют наличие или отсутствие действий за выбранный промежуток времени и соответствие их безусловному и контрольно-условному набору действий, причем к безусловным дискретно изменяемым параметрам оценки действий водителя автомобиля относят действия водителя, которые должны быть выполнены в соответствии с неизменяемыми условиями инструкции по эксплуатации автомобиля и дорожной обстановки, к контрольно-условным, дискретно изменяемым параметрам оценки действий относят действия водителя, которые должны быть выполнены в соответствии с условиями состояния окружающей среды, такими как дорожные и погодные условия, а при отсутствии действий водителя приступают к анализу изменений для непрерывно изменяющихся параметров, для этого определяют для каждого из них производную по времени в виде временного ряда на выбранном промежутке времени, величину которой сравнивают с ее пороговым эталонным и/или контрольным значением для соответствующего непрерывно изменяющегося параметра, при отсутствии их соответствия определяют величину расхождения непрерывно изменяющихся параметров с эталонными значениями и делают вывод об уровне аварийной ситуации и необходимой последовательности противоаварийных действий, причем величину анализируемого промежутка времени выбирают из условий, учитывающих скорость движения автомобиля и дорожные условия.
2. Способ контроля состояния бодрствования водителя автомобиля по п. 1, отличающийся тем, что к непрерывно изменяющимся параметрам, относят положение акселератора, тормозной педали и рулевого управления.
3. Способ контроля состояния бодрствования водителя автомобиля по п. 1, отличающийся тем, что контрольный уровень противоаварийных действий, соответствующий формированию сигналов водителю для подтверждения его двигательной активности путем изменения воздействий на органы управления, предшествует противоаварийным действиям всех уровней.
4. Способ контроля состояния бодрствования водителя автомобиля по п. 1, отличающийся тем, что к первому уровню противоаварийных действий относят средства информирования водителя.
5. Способ контроля состояния бодрствования водителя автомобиля по п. 6, отличающийся тем, что к первому уровню противоаварийных действий относят воздействие на водителя внутри кабины автомобиля тактильно-вибрационным, и/или звуковым, и/или прерывистым световым сигналом.
6. Способ контроля состояния бодрствования водителя автомобиля по п. 1, отличающийся тем, что ко второму уровню противоаварийных действий относят оповещение окружающих об неадекватном состоянии водителя.
7. Способ контроля состояния бодрствования водителя автомобиля по п. 8, отличающийся тем, что ко второму уровню противоаварийных действий относят автоматические подачу установленных Правилами дорожного движения аварийных сигналов светом и/или звуком и передачу аварийных сообщений экстренным службам об аварийно-опасном движении автомобиля.
8. Способ контроля состояния бодрствования водителя автомобиля по п. 1, отличающийся тем, что к третьему уровню противоаварийных действий относят принудительное изменение положения акселератора, отключение круиз-контроля и активацию торможения.
9. Способ контроля состояния бодрствования водителя автомобиля по п. 1, отличающийся тем, что к третьему уровню противоаварийных действий относят автоматическую принудительную остановку автомобиля.
| Устройство для выгрузки рельсов с подвижного состава и раскладки их на пути | 1947 |
|
SU83968A1 |
| Электроионитный способ очистки сточных вод от кремнефтористого натрия | 1961 |
|
SU146249A1 |
| US 9663047 B2, 30.05.2017. | |||

