Область техники, к которой относится изобретение
Изобретение относится к автомобилестроению, в частности, к способам и устройствам активной безопасности транспортных средств (ТС), преимущественно в виде составов из ТС, а именно, автопоездов, состоящих из автомобиля и, по меньшей мере, одного прицепа.
Уровень техники
Известен способ идентификации максимальных значений коэффициентов трения скольжения колос транспортного средства, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес, и реализующее его устройство для оценки коэффициента трения скольжения колес с дорогой, в котором реализуются действия способа оценки коэффициента трения колес с дорогой, в котором коэффициент трения скольжения колес с дорогой определяется на основе отношения расчетной силы поворота к расчетному углу бокового скольжения шины. Транспортное средство движется по нескольким дорожным поверхностям, которые отличаются коэффициентом трения, а углы бокового скольжения шин и силы поворота на дорожных поверхностях определяются заранее. Блок оценки коэффициента трения хранит в памяти корреляцию между обнаруженными углами бокового скольжения шины, обнаруженными силами поворота и коэффициентами трения дороги в виде числовых значений или математического выражения и оценивает коэффициент трения дороги, используя корреляцию, хранящуюся в памяти (см. патент ЕС ЕР2572947А1, заявители JTEKT Corp, опубл. 26.10.2016).
Недостатком способа является приближенность определяемого значения коэффициента трения скольжения колос ТС, сложная процедура обработки данных с датчиков ТС и применимость метода только в условиях неоднородности дорожного покрытия. Основным же недостатком способа является отсутствие возможности определения значения коэффициента трения скольжения колес прицепа автопоезда, учет которого необходим для обеспечения безопасного управления движением автопоезда.
Известен способ определения коэффициента трения скольжения колес на основе базы данных, в котором информация о текущем коэффициенте трения скольжения колес, геометрических особенностях участка, координатах и времени принимается от других транспортных средств в виде базы данных (см. заявку на патент США US 20170357669 А1, заявитель Robert Bosch GmbH, опубл. 14.12.2017).
Недостатком способа является необходимость наличия приемопередающих устройств в ТС, значительный объем полученной и переданной информации и вопрос об актуальности этой информации. Основным же недостатком способа является отсутствие возможности определения значения коэффициента трения скольжения колес прицепа автопоезда, учет которого необходим для обеспечения безопасного управления движением автопоезда.
Известен способ идентификации максимальных значений коэффициентов трения скольжения колес ТС путем регистрации сигналов, формируемых датчиками первичной информации о физических переменных, характеризующих состояние колес, и передачи их в блок обработки информации, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес. В рассматриваемом способе, коэффициенты трения скольжения колес определяются при пересчете частот вращения колес от ABS-датчиков в скорости скольжений колес и другие величины, необходимые для расчета коэффициентов трения скольжения каждого из колес. Средний коэффициент трения определяется при использовании весовой функции для коэффициентов трения всех колес (см. патент Японии JP 2004025907 А, заявители Koji Takao, опубл. 01.10.2008).
Недостатком способа является неопределенность выбора весового коэффициента для каждого из усредненных значений итогового коэффициента трения скольжения. Но основным недостатком данного способа также является отсутствие возможности определения значения коэффициента трения скольжения колес прицепа автопоезда, учет которого необходим для обеспечения безопасного управления движением автопоезда.
Известна группа изобретений, относящаяся к системе автомобиля для помощи водителю при движении задним ходом с прицепом. Адаптивная система помощи при движении задним ходом автомобиля с прицепом включает датчик угла сцепки, датчик угла поворота рулевых колес автомобиля, модуль ввода данных и контроллер. Модуль ввода данных используется для задания водителем требуемого балансировочного угла сцепки с учетом не превышения угла складывания и коэффициента усиления закона управления также со своим ограничением. Контроллер содержит регулятор угла сцепки, который на основе измеренных значений углов сцепки и поворота рулевых колес автомобиля формирует закон управления рулевыми колесами автомобиля и который без использования сигнала о скорости движения формирует закон отклонения рулевых колес автомобиля и ограничение задаваемых сигналов на основе полученных оценок, исполнительное устройство, отклоняющее рулевые колеса автомобиля по сигналам регулятора угла сцепки, и идентификатор для получения оценок кинематических параметров математической модели объекта управления «автомобиль-прицеп». (См. патент РФ RU 2702199 С2, опубл. 04.10.2019. Бюл. №28). С помощью данной группы изобретений достигается создание адаптивной системы помощи водителю и/или системы с автонастройкой в текущем времени системы управления с использованием принципа управления по заданному балансировочному углу сцепки.
Однако данное техническое решение не применимо для определения значения коэффициента трения скольжения колес прицепа автопоезда, учет которого необходим для обеспечения безопасного управления движением автопоезда.
Наиболее близким по технической сущности является способ идентификации максимальных значений коэффициентов трения скольжения колес транспортного средства, в котором регистрируют импульсы, формируемые датчиками частот вращения колес, которые используются в качестве датчиков первичной информации о физических переменных, характеризующих состояние колес ТС, и подают на вход блока обработки информации, в котором по значениям частот вращения колес определяют в реальном времени максимальные значения коэффициентов трения скольжения колес как результат решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициентов трения скольжения от скольжения, параметрически связанной с максимальным значением коэффициента трения скольжения на всех участках аппроксимации, на выходе блока обработки информации формируют сигнал с информацией о максимальных значениях коэффициентов трения скольжения колес и передают на средство визуального отображения информации и на внешние блоки управления движением для использования в качестве входных данных для обеспечения безопасного управления тягой, тормозами и рулем. (См. патент РФ RU 2779539 С1, заявитель
Федеральное государственное унитарное предприятие "Центральный ордена Трудового Красного Знамени научно-исследовательский автомобильный и автомоторный институт "НАМИ" (ФГУП "НАМИ"), опубл. 08.09.2022). Данный способ принят за прототип настоящего изобретения.
Однако недостатком и этого способа, в котором производится идентификация максимальных значений коэффициентов трения скольжения колес транспортного средства, является отсутствие возможности определения максимального значения коэффициента трения скольжения колес прицепа в составе автопоезда.
Раскрытие сущности изобретения
В соответствии с принятой в АН СССР терминологией по автомобилям в автопоезде его составляющие названы как автомобиль-тягач и прицеп, (АКАДЕМИЯ НАУК СССР, КОМИТЕТ ТЕХНИЧЕСКОЙ ТЕРМИНОЛОГИИ, СБОРНИКИ РЕКОМЕНДУЕМЫХ ТЕРМИНОВ, под редакцией академика А.М. ТЕРПИГОРЕВА, Выпуск 67, ТЕРМИНОЛОГИЯ ПО АВТОМОБИЛЯМ, ИЗДАТЕЛЬСТВО АКАДЕМИИ НАУК СССР, МОСКВА, 1954, См. также Известия Академии наук СССР, ОТН, №7, 1940; №ft, 7, 8, 1941; №5, 6, 12, 1948; №10, 1949; №7, 10, 1952; №7, 1953). С учетом словаря-справочника за 2008 год (Гусаков Н.В., Кисуленко Б.В. Техническое регулирование в автомобилестроении: Словарь-справочник. Под ред. Б.В. Кисуленко. - М.: «Машиностроение», 2008. 272 с: ил.) в дальнейшем составные части автопоезда будем называть как автомобиль и прицеп.
Идентификация максимальных значений коэффициентов трения скольжения колес транспортного средства в виде автопоезда не только у автомобиля из автопоезда, но и у его каждого прицепа, и последующее сравнение максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа позволяет более точно рассчитать окончательные выходные данные, передаваемые на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных для внешних блоков управления движением автопоезда с целью обеспечения большей безопасности управления движением автопоезда, которую невозможно достигнуть без учета максимальных значений коэффициентов трения скольжения колес прицепа, механически связанного с автомобилем в составе автопоезда и движущихся в общем случае в отличающихся дорожных условиях.
Таким образом, дополнительная идентификация данного параметра у прицепа необходима для обеспечения более безопасного управления тягой, тормозами, рулем автопоезда в составе автомобиля и прицепа, учет которого необходим для обеспечения безопасного управления тягой и рулем автомобиля, а также тормозами автомобиля и прицепа в составе автопоезда, так как в общем случае они движутся в отличающихся дорожных условиях.
Техническая задача, на решение которой направлено предлагаемое изобретение, состоит в повышении устойчивости и управляемости автопоезда путем разработки способа косвенных измерений максимальных значений коэффициентов трения скольжения колес отдельно для автомобиля и для каждого прицепа в системе управления движением автопоезда, сравнения их величин, формирования окончательных выходных данных и передачи их на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных для обеспечения безопасного управления движением автопоезда.
Поставленная техническая задача решается тем, что в способе идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда путем регистрации импульсов, формируемых датчиками частот вращения колес автомобиля, входящего в состав автопоезда, которые используются в качестве датчиков первичной информации о физических переменных, характеризующих состояние колес автомобиля, передачи импульсов на вход блока обработки информации автомобиля, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес автомобиля и по значениям частот вращения колес автомобиля определяют в реальном времени максимальные значения коэффициентов трения скольжения колес автомобиля как результат решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициентов трения скольжения колес автомобиля от скольжения, связанной параметрически с максимальным значением коэффициента трения скольжения на всех участках аппроксимации, и на выходе блока обработки информации автомобиля формируют сигнал с информацией о максимальных значениях коэффициентов трения скольжения колес автомобиля, отличающийся тем, что дополнительно регистрируют импульсы, формируемые датчиками частот вращения колес прицепа автопоезда, которые используют в качестве датчиков первичной информации о физических переменных, характеризующих состояние колес прицепа, импульсы передают на вход блока обработки информации прицепа, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес прицепа и по значениям частот вращения колес прицепа определяют в реальном времени максимальные значения коэффициентов трения скольжения колес прицепа как результат решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициентов трения скольжения колес прицепа от скольжения, связанной параметрически с максимальным значением коэффициента трения скольжения на всех участках аппроксимации, и на выходе блока обработки информации прицепа формируют сигнал с информацией о максимальных значениях коэффициентов трения скольжения колес прицепа, после чего численные значения сигналов с информацией о максимальных значениях коэффициентов трения скольжения колес отдельно как для автомобиля, так и для прицепа передают в дополнительный информационно-управляющий блок автопоезда, в котором по результатам сравнения максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа формируют окончательные выходные данные, которые передают на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных, с обеспечивающих безопасное управление движением автопоезда.
При этом максимальные значения коэффициентов трения скольжения колес автомобиля и прицепа с двускатными колесами идентифицируют как единое целое путем регистрации импульсов, формируемых датчиками частот вращения колес, устанавливаемых со стороны внешних или внутренних скатов автомобиля и прицепа в зависимости от особенностей их конструкции и назначения.
Кроме этого максимальные значения коэффициентов трения скольжения колес с количеством осей более двух у автомобиля и/или прицепа идентифицируют путем регистрации импульсов, формируемых датчиками частот вращения колес, устанавливаемых преимущественно на колесах с внешних передней и задней осей автомобиля и прицепа, то есть их передней и самой задней осей, но с учетом особенностей их конструкции и назначения, например, при конструкции автомобиля или прицепа, в которой при снижении нагрузки одна из осей поднимается, то измерение производят на оси, остающейся в контакте с дорогой, что является достаточным для целей измерения и расчета.
Технический результат состоит в реализации косвенных измерений максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда, сравнении их величин, формировании окончательных выходных данных и передачи их на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных для обеспечения безопасного управления движением автопоезда.
Способ идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда путем регистрации импульсов, формируемых датчиками частот вращения колес автомобиля, входящего в состав автопоезда, которые используются в качестве датчиков первичной информации о физических переменных, характеризующих состояние колес автомобиля, передачи импульсов на вход блока обработки информации автомобиля, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес автомобиля и по значениям частот вращения колес автомобиля определяют в реальном времени максимальные значения коэффициентов трения скольжения колес автомобиля как результат решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициентов трения скольжения колес автомобиля от скольжения, связанной параметрически с максимальным значением коэффициента трения скольжения на всех участках аппроксимации, и на выходе блока обработки информации автомобиля формируют сигнал с информацией о максимальных значениях коэффициентов трения скольжения колес автомобиля, отличающийся тем, что дополнительно регистрируют импульсы, формируемые датчиками частот вращения колес прицепа автопоезда, которые используют в качестве датчиков первичной информации о физических переменных, характеризующих состояние колес прицепа, импульсы передают на вход блока обработки информации прицепа, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес прицепа и по значениям частот вращения колес прицепа определяют в реальном времени максимальные значения коэффициентов трения скольжения колес прицепа как результат решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициентов трения скольжения колес прицепа от скольжения, связанной параметрически с максимальным значением коэффициента трения скольжения на всех участках аппроксимации, и на выходе блока обработки информации прицепа формируют сигнал с информацией о максимальных значениях коэффициентов трения скольжения колес прицепа, после чего численные значения сигналов с информацией о максимальных значениях коэффициентов трения скольжения колес отдельно как для автомобиля, так и для прицепа передают в дополнительный информационно-управляющий блок автопоезда, в котором по результатам сравнения максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа формируют окончательные выходные данные, которые передают на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных, обеспечивающих безопасное управление движением автопоезда.
При этом максимальные значения коэффициентов трения скольжения колес автомобиля и прицепа с двускатными колесами идентифицируют как единое целое путем регистрации импульсов, формируемых датчиками частот вращения колес, устанавливаемых со стороны внешних или внутренних скатов автомобиля и прицепа в зависимости от особенностей их конструкции и назначения. Преимущественно датчики частот вращения колес устанавливают со стороны внешних скатов. Но в зависимости от большей конструктивной простоты установки датчиков и меньших затрат на их установку, от удобства эксплуатации и обслуживания, а также от варианта применения автопоезда, например, двойного назначения, требующего дополнительной защиты от внешних воздействий, датчики частот вращения колес могут устанавливаться со стороны внутренних скатов автомобиля и/или прицепа.
Кроме этого, максимальные значения коэффициентов трения скольжения колес с количеством осей более двух у автомобиля и/или прицепа идентифицируют путем регистрации импульсов, формируемых датчиками частот вращения колес, устанавливаемых преимущественно на колесах внешних, то есть передней и самой задней осей автомобиля и прицепа, но с учетом особенностей их конструкции и назначения. Исключением из этого правила могут быть, например, варианты конструкции автомобилей и/или прицепов автопоездов с поднимаемой одной из внешних осей при их движении без груза.
Краткое описание чертежей
Заявленное изобретение поясняется чертежами.
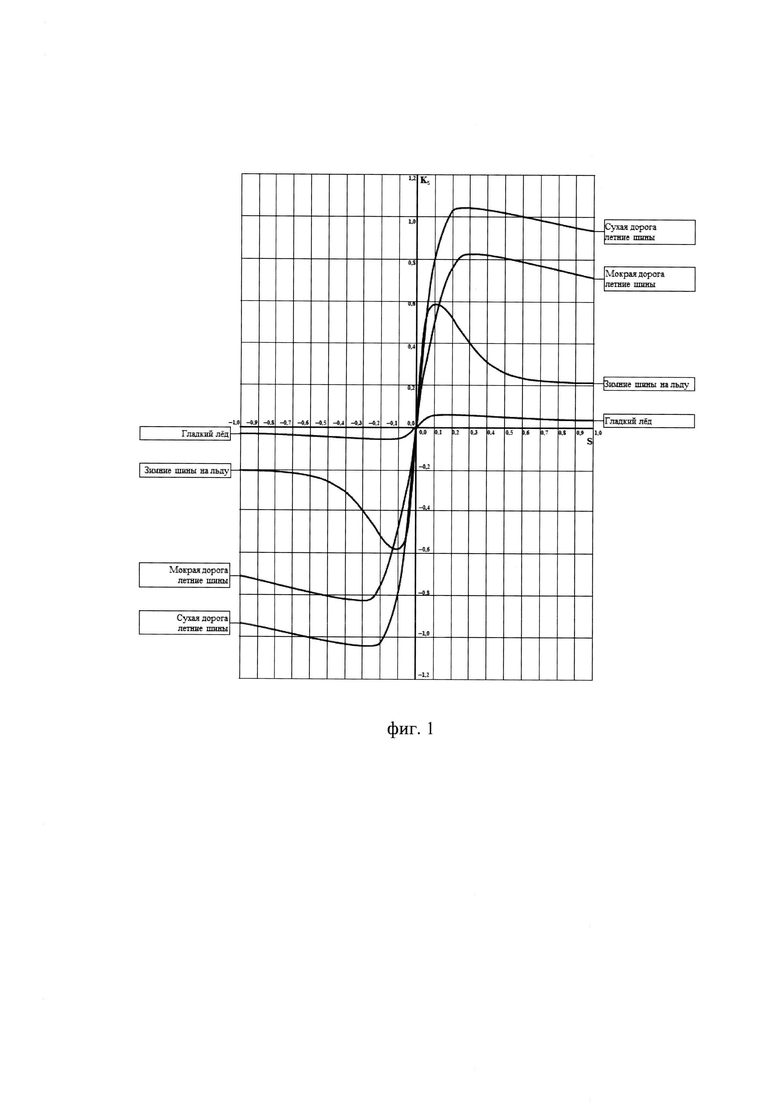
На фиг. 1 приведено семейство кривых обобщенной зависимости коэффициентов трения скольжения ks колес ТС от величины продольного скольжения S.
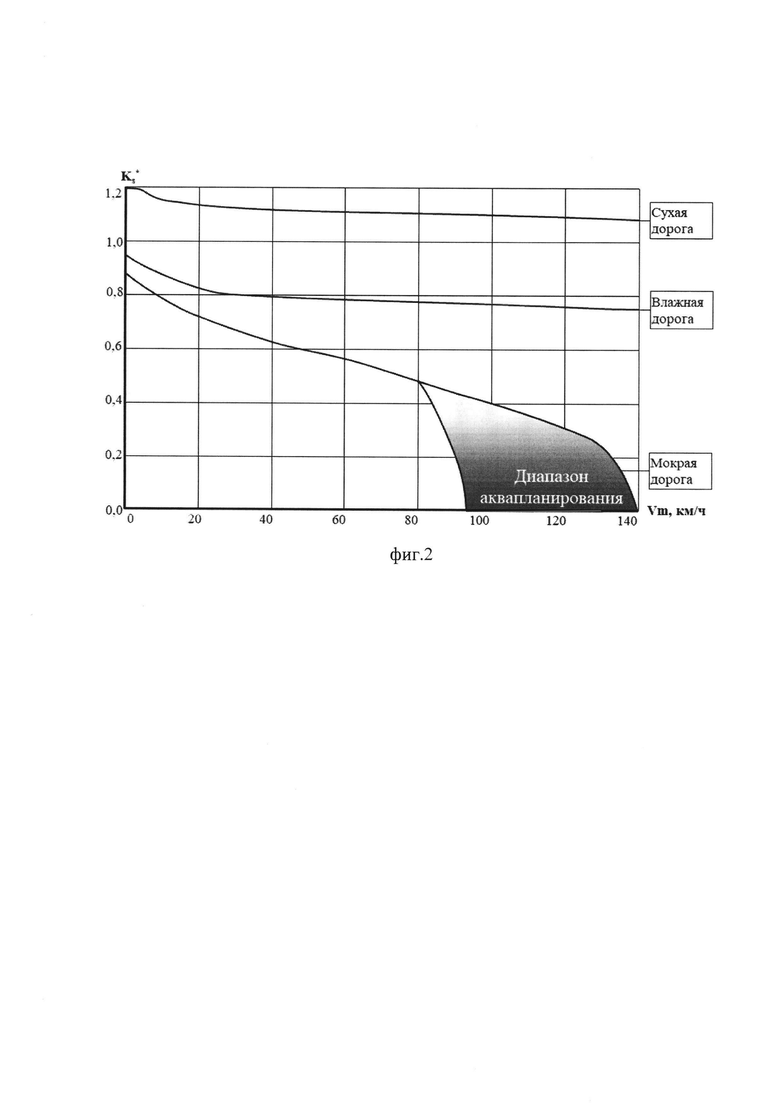
На фиг. 2 приведена обобщенная зависимость  от скорости Vm движения ТС на различных покрытиях.
от скорости Vm движения ТС на различных покрытиях.
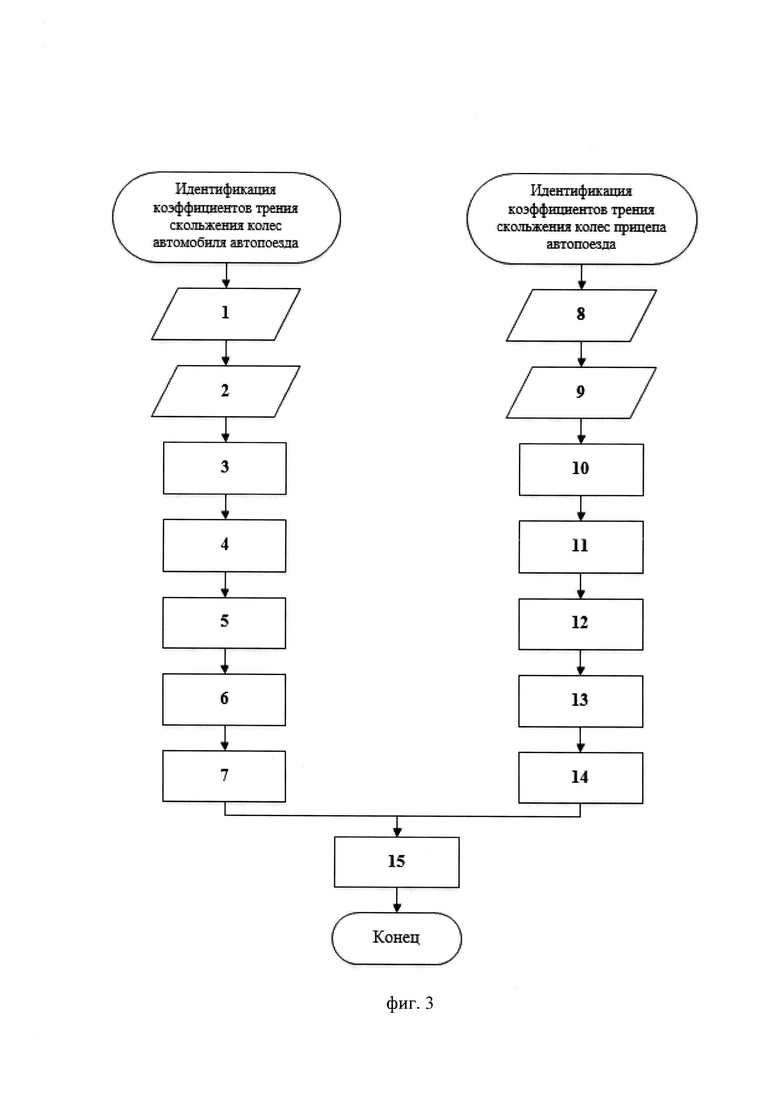
Фиг. 3 содержит алгоритм работы информационно-управляющего блока автопоезда.
Осуществление изобретения
Предложение поясняют рисунки, где на фиг. 1 приведено семейство обобщенной зависимости коэффициентов трения скольжения ks колес каждой из частей, составляющих автопоезд, как транспортное средство от величины продольного скольжения S, представленных в виде нечетных функций ks(S)=-ks(-S) для различных поверхностей с максимальными значениями 
В результате исследования шин транспортных средств установлено, что в условиях реальной эксплуатации величины коэффициентов трения скольжения  для n-колесной схемы автомобиля или прицепа) шин и передаваемые силы при разгонах, торможениях и на поворотах существенно зависят от ряда факторов и могут изменяться в достаточно широких пределах.
для n-колесной схемы автомобиля или прицепа) шин и передаваемые силы при разгонах, торможениях и на поворотах существенно зависят от ряда факторов и могут изменяться в достаточно широких пределах.
К числу основных факторов, существенно влияющих на  автомобилей и прицепов, и автопоезда в целом, например, относятся:
автомобилей и прицепов, и автопоезда в целом, например, относятся:
- скорости продольного скольжения шины;
- состав материала протектора шины;
- глубина и форма рисунка протектора шины;
- температура шины и поверхности дорожного покрытия;
- ширина и рисунок профиля шины;
- давление воздуха в шине;
- состав материала дорожного покрытия;
- состояние поверхности дорожного покрытия;
- удельное давление шины на дорожное покрытие;
- сухое и влажное состояние дорожного покрытия;
- глубина водного слоя на поверхности дорожного покрытия;
- наличие песка, снега и гололеда на дорожном покрытии;
- скорость продольного движения центров масс автомобиля, прицепа и автопоезда.
На фиг. 1 приведены обобщенные диапазоны изменений максимальных значений коэффициентов трения скольжения  современных шин, которые сверху ограничены величиной порядка 1,2 для сухого асфальтобетона, для сликов (т.е. вида автомобильных шин, предназначенных для гонок, Слик (англ. slick) - абсолютно гладкая шина, не имеющая ни канавок (протектора), ни иных элементов, уменьшающих пятно контакта с трассой, см. Википедия © Академик, 2000-2023) значения коэффициентов трения скольжения
современных шин, которые сверху ограничены величиной порядка 1,2 для сухого асфальтобетона, для сликов (т.е. вида автомобильных шин, предназначенных для гонок, Слик (англ. slick) - абсолютно гладкая шина, не имеющая ни канавок (протектора), ни иных элементов, уменьшающих пятно контакта с трассой, см. Википедия © Академик, 2000-2023) значения коэффициентов трения скольжения  могут доходить до 1,8 и более, а снизу эти значения ограничены величиной порядка 0,05 в случае движения по таящему льду. В режиме аквапланирования величина
могут доходить до 1,8 и более, а снизу эти значения ограничены величиной порядка 0,05 в случае движения по таящему льду. В режиме аквапланирования величина  может снижаться практически до нулевых значений.
может снижаться практически до нулевых значений.
На фиг. 2 приведена обобщенная зависимость  от скорости Vm на различных покрытиях.
от скорости Vm на различных покрытиях.
Изменения  сопровождаются соответствующими изменениями граничной скорости пробуксовок ведущих колес каждой из составляющих автопоезда, граничных скоростей заноса и сноса колес задней и передней осей, граничных значений безопасных дистанций между попутными ТС и тормозного пути.
сопровождаются соответствующими изменениями граничной скорости пробуксовок ведущих колес каждой из составляющих автопоезда, граничных скоростей заноса и сноса колес задней и передней осей, граничных значений безопасных дистанций между попутными ТС и тормозного пути.
Идентификация коэффициентов трения скольжения колес автомобиля и прицепа заключается в формировании адекватных оценок  максимальных значений коэффициентов трения скольжения колес в соответствии с третьим законом Ньютона и основана на уравнении равенства тягово-тормозных сил и сил трения скольжения.
максимальных значений коэффициентов трения скольжения колес в соответствии с третьим законом Ньютона и основана на уравнении равенства тягово-тормозных сил и сил трения скольжения.

Fi - тягово-тормозная сила, воздействующая на i-e колесо автомобиля или прицепа;
FNi - нормальная составляющая динамической нагрузки на i-e колесо автомобиля или прицепа;
ksi - коэффициент трения скольжения i-ro колеса автомобиля или прицепа.
Коэффициенты трения скольжения в продольных ksdi и поперечных kSqi направлениях автомобиля и/или прицепа связанные между собой ограничением "круга Камма":

 - топовое (максимальное) значение коэффициента трения скольжения i-го колеса автомобиля или прицепа.
- топовое (максимальное) значение коэффициента трения скольжения i-го колеса автомобиля или прицепа.
Фиг. 3 содержит вычислительный блок алгоритма максимальных значений коэффициентов трения скольжения колес автопоезда, реализующий следующие действия способа:
1 - ввод данных настроечных параметров математической модели автомобиля, или прицепа, или автопоезда в целом;
2 - ввод данных о частотах вращения колес автомобиля автопоезда;
3 - вычисление параметров движения автомобиля автопоезда;
4 - вычисление нормальных составляющих динамической нагрузки на каждое колесо автомобиля автопоезда;
5 - вычисление тягово-тормозных сил, воздействующих на каждое колесо автомобиля автопоезда;
6 - решение обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения автомобиля автопоезда;
7 - фильтрация оценок максимальных значений коэффициентов трения скольжения колес автомобиля автопоезда;
8 - ввод данных настроечных параметров математической модели прицепа автопоезда;
9 - ввод данных об измеренных частотах вращения колес прицепа автопоезда;
10 - вычисление параметров движения прицепа автопоезда;
11 - вычисление нормальных составляющих динамической нагрузки на каждое колесо прицепа автопоезда;
12 - вычисление тягово-тормозных сил, воздействующих на каждое колесо прицепа автопоезда;
13 - решение обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения прицепа автопоезда;
14 - фильтрация оценок максимальных значений коэффициентов трения скольжения колес прицепа автопоезда;
15 - вывод данных на внешние устройства автопоезда для контроля его движения водителем или внешней системой управления.
Ввод настроечных данных параметров математической модели автомобиля, прицепа и используемых на них шин выполняют однократно при настройке системы в случаях внесения изменений, например, при замене шин с летних на зимние и наоборот, или при использовании в автопоезде всесезонных шин, например, на автомобиле.
Изменения сезонных настроек параметров используемых шин выполняют автоматически при вводе команд «Лето» или «Зима», или «Все сезоны» с устройства ввода данных.
Сигналы, формируемые импульсными датчиками частот вращения колес автомобиля и прицепа, регистрируют и передают их через блоки сопряжения в блоки обработки информации соответственно автомобиля и прицепа.
В блоках вычисления параметров движения колесных автомобиля и прицепа по известному способу косвенных измерений [аналогично как в Патенте РФ №RU2335805 «Способ предотвращения столкновения автомобиля с препятствиями и система для его осуществления»] определяют скорость центра масс автомобиля и прицепа (Vm), продольные и поперечные ускорения (am, aq), угол поворота управляемых колес (ϕс) и продольные скольжения колес автомобиля и прицепа (Si, 1≤i≤4). В общем виде аналогично, как в соответствии с патентом РФ № RU 2335805, согласно формуле, регистрируют импульсы, формируемые датчиками частот вращения колес, которые используют в качестве датчиков первичной информации о физических переменных, характеризующих состояние автомобиля, и подают на вход блока обработки информации, в котором по значениям частот вращения колес определяют в реальном времени значения физических переменных, характеризующих состояние автомобиля, и граничные значения физических переменных, на выходе блока обработки информации формируют сигнал с информацией о приближении физических переменных, характеризующих состояние автомобиля, к граничным значениям или их превышении и передают на средство визуального отображения информации и на, по крайней мере, одно средство индикации опасных состояний, которые активируют в соответствии с формируемым сигналом, в зависимости от значений физических переменных и граничных значений физических переменных, характеризующих состояние автомобиля, формируют сигнал с управляющим действием, предотвращающим столкновения автомобиля с препятствиями.
В блоках вычислений нормальных составляющих динамических нагрузок вычисляют значения нагрузок на колеса автомобиля и прицепа соответственно.
Нормальные составляющие нагрузки на i-e колесо FNi автомобиля определяют в виде:
m1, m2, m3, m4 - массы, приходящиеся соответственно на переднее левое (i=1), переднее правое (i=2), внешнее заднее левое (i=3) и внешнее заднее правое (i=4) колесо автомобиля;
g - ускорение свободного падения;
m0 - суммарная масса автомобиля;
 - тяговое ускорение центра масс автомобиля;
- тяговое ускорение центра масс автомобиля;
Fdi, 1≤i≤4, - тяговая сила, приложенная к i-му колесу автомобиля;
 - тормозное замедление центра масс автомобиля;
- тормозное замедление центра масс автомобиля;
FTi, 1≤i≤4, - тормозная сила, приложенная к i-му колесу автомобиля;
 - поперечное ускорение центра масс автомобиля;
- поперечное ускорение центра масс автомобиля;
Rm - радиус поворота автомобиля;
b - колесная база автомобиля; а - ширина колеи автомобиля; hm- высота центра масс автомобиля;
Rd - динамический радиус колес автомобиля;
αт - угол тангажа автомобиля;
βк - угол крена дорожного покрытия для автомобиля;
kz1, kz2, kZ3, kz4 - коэффициенты аэродинамического сопротивления по вертикальной оси автомобиля;
Vm - продольная скорость центра масс автомобиля.
Нормальные составляющие нагрузки на i-е колесо FNi каждого прицепа в составе автопоезда определяют в виде:
m1, m2, m3, m4 - массы, приходящиеся соответственно на переднее левое (i=1), переднее правое (i=2), внешнее заднее левое (i=3) и внешнее заднее правое (i=4) колесо прицепа;
m0 - суммарная масса прицепа;
aат=(ad-ат) - продольное тягового-тормозное ускорение центра масс автомобиля и прицепа соответственно;
 - тяговое ускорение центра масс прицепа;
- тяговое ускорение центра масс прицепа;
Fdi, 1≤i≤4, - тяговая сила, приложенная к i-му колесу прицепа;
 - тормозное замедление центра масс прицепа;
- тормозное замедление центра масс прицепа;
FTi, 1≤i≤4, - тормозная сила, приложенная к i-му колесу прицепа;
 - поперечное ускорение центра масс прицепа;
- поперечное ускорение центра масс прицепа;
Rm - радиус поворота прицепа;
b - колесная база прицепа; а - ширина колеи прицепа; hm - высота центра масс прицепа;
Rd - динамический радиус колес прицепа;
αт - угол тангажа прицепа;
βк - угол крена дорожного покрытия для прицепа;
kz1, kz2, kZ3, kz4 - коэффициенты аэродинамического сопротивления по вертикальной оси прицепа;
Vm - продольная скорость центра масс прицепа.
В условиях движения, близкого к прямолинейному (aq ≈ 0) на горизонтальной гладкой поверхности, без продольных (αт ≈ 0) и поперечных уклонов (βk ≈ 0) дорожного покрытия и антикрыльев, системы уравнений (3) и (4) используют для вычисления нормальных составляющих нагрузки на каждое измеряемое колесо автомобиля (3) и прицепа (4) соответственно.
При количестве осей более двух у автомобиля и/или прицепа системы уравнений (3) и (4) используют для вычисления нормальных составляющих нагрузки на каждое колесо внешних передней и задней осей автомобиля и прицепа соответственно. Исключением из этого правила могут быть, например, варианты конструкции автомобилей и прицепов автопоездов с поднимаемой одной из внешних осей при их движении без груза.
Величину тягово-тормозного ускорения adT по отдельности автомобиля и прицепа соответственно определяют из уравнения второго закона Ньютона в виде:

где kx - коэффициент лобового аэродинамического сопротивления соответственно автомобиля или прицепа;
kтр - коэффициент трения качения шин соответственно автомобиля или прицепа.
Величины am и Vm, входящие в вектор параметров движения автомобиля и прицепа соответственно измеряют по данным частот вращения ведомых колес, значения kx, kтр и m0 вводят как параметры настройки. В условиях движения по поверхностям, близким к горизонтальным (аТ ≈ 0), величина adT автомобиля и прицепа соответственно вычисляется однозначно.
Далее распределение тяговых Fdi и тормозных сил FTi по колесам автомобиля и прицепа соответственно (1≤i≤4) вычисляется и задается аналогичными системами и уравнениями:


K3i - коэффициенты усиления i-го тормоза автомобиля и прицепа соответственно;
 - управляющее воздействие на тормозную систему автомобиля и прицепа соответственно;
- управляющее воздействие на тормозную систему автомобиля и прицепа соответственно;
Рт - давление в тормозной системе автомобиля и прицепа соответственно;
PTmax - максимальное давление в тормозной системе автомобиля и прицепа соответственно.
Величину U3 определяют по данным измерения adT в виде:

amin - минимальное значение замедления при торможении с не отключенной трансмиссией, задаваемое в настроечных данных;
amax - максимальное значение замедления.
Зависимость коэффициента трения скольжения в продольном направлении от величины продольного скольжения  колеса автомобиля и прицепа соответственно аппроксимируют кусочно-линейной функцией вида:
колеса автомобиля и прицепа соответственно аппроксимируют кусочно-линейной функцией вида:

Е, SГр1, SГр2 - параметры настройки для используемых моделей шин автомобиля и прицепа соответственно в условиях летней или зимней, или всесезонной эксплуатации (например, Е=0.005, SГр1=0.15, SГр2=0.3);
а0, b0, - вещественные числа, задаваемые при настройке кусочно-линейной аппроксимации (например, а0=0.25, b0=5.0).
Текущие значения коэффициентов трения скольжения kSi автомобиля и прицепа соответственно определяют из уравнения (1) 3-го закона Ньютона, соответствующих равенству действующих на колеса внешних сил и сил трения скольжения.
Оценки максимальных значений коэффициентов трения скольжения  автомобиля и прицепа в дискретном времени определяют как решение обратной задачи кусочно-линейной аппроксимации ksi(Si):
автомобиля и прицепа в дискретном времени определяют как решение обратной задачи кусочно-линейной аппроксимации ksi(Si):

Оценки максимальных (топовых) значений коэффициентов трения скольжения ведомых колес автомобиля и/или прицепа соответственно не определяют в режимах разгона и движения с постоянной скоростью (adT>0) и устанавливают равными оценкам ведущих колес одного борта  и
и 
Фильтрацию оценок максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа соответственно для ограничения влияния шумов измерения на результаты, выполняют по известным алгоритмам ограничений по допустимому диапазону и гладкости по ограничениям по первой и второй производной.
Итоговая оценка максимальных значений коэффициентов трения скольжения колес отдельно для автомобиля и прицепа определяются в виде:

При этом максимальные значения коэффициентов трения скольжения колес автомобиля и прицепа с двускатными колесами идентифицируют как единое целое путем регистрации импульсов, формируемых датчиками частот вращения колес, устанавливаемых со стороны внешних или внутренних скатов автомобиля и прицепа в зависимости от особенностей их конструкции и назначения. Преимущественно датчики частот вращения колес устанавливаются со стороны внешних скатов. Но в зависимости от большей конструктивной простоты установки датчиков и меньших затрат на их установку, от удобства эксплуатации и обслуживания, а также от варианта применения автопоезда, например, двойного назначения, требующего дополнительной защиты от внешних воздействий, датчики частот вращения колес могут устанавливаться со стороны внутренних скатов автомобиля и/или прицепа.
Кроме этого, максимальные значения коэффициентов трения скольжения колес с количеством осей более двух у автомобиля и/или прицепа идентифицируют путем регистрации импульсов, формируемых датчиками частот вращения колес, устанавливаемых преимущественно на колесах внешних передней и задней осей автомобиля и прицепа, но с учетом особенностей их конструкции и назначения. Исключением из этого правила могут быть, например, варианты конструкции автомобилей и прицепов автопоездов с поднимаемой одной из их внешних осей при их движении без груза.
Численные значения сигналов с информацией о максимальных значениях коэффициентов трения скольжения колес отдельно для автомобиля и для прицепа передают в дополнительный информационно-управляющий блок автопоезда, в котором по результатам сравнения значений коэффициентов трения скольжения колес автомобиля и прицепа формируют окончательные выходные данные, которые передают на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных с целью обеспечения безопасного управления движением автопоезда.
Вывод данных на внешнее устройство автопоезда выполняют, например, на устройство визуального отображения данной информации водителю и/или на блоки управления движением автопоезда для использования в качестве входных данных, обеспечивающих безопасное управление движением автопоезда.
Описанная последовательность действий способа и используемое для его реализации минимальное число технических средств позволяет достичь следующих технических преимуществ над известными способами:
- идентификация максимальных значений коэффициентов трения скольжения шин автомобиля и прицепа выполняется при разгонах, движении с постоянной скоростью и торможениях автопоезда;
- низкая стоимость технических средств системы обеспечения безопасного управления движением автопоезда, обусловленная отсутствием необходимости введения дополнительных физических датчиков первичной информации, кроме установленных на прицепе и необходимых для решения поставленной задачи;
- возможность функционирования в неполной конфигурации датчиков частот вращения колес, включая отказы одного или двух датчиков разных бортов автомобиля и/или прицепа;
- пониженное энергопотребление, обусловленное отсутствием необходимости обеспечения электропитанием дополнительных датчиков информации;
- более высокая эксплуатационная надежность работы системы безопасного управления движением автопоезда, обусловленная идентификацией максимальных значений коэффициентов трения скольжения колес не только автомобиля, но и его прицепа, а в результате реализации минимальной конфигурацией используемых в системе технических средств, включая датчики первичной информации;
- достижение новых, ранее неизвестных технических результатов по обеспечению безопасного управления движением всего автопоезда в целом путем идентификации и учета в работе системы его управления движением максимальных значений коэффициентов трения скольжения колес не только автомобиля, но и прицепа, а также по обеспечению синхронизированной работы указанных частей и всего автопоезда в целом;
- отсутствие влияния состояния внешней среды, включая освещенность, осадки, туман, состояние дорожного покрытия и других погодных и дорожных факторов на эффективность функционирования системы обеспечения безопасного управления движением автопоезда.
На основании изложенного можно утверждать следующее.
Поставленная техническая задача решается техническими средствами и может быть использована в предложенном виде для оснащения как новых, так и находящихся в эксплуатации автопоездов, следовательно, предложение соответствует критерию охраноспособности изобретения «промышленная применимость».
Предложение имеет отличия от известного способа работы, следовательно, соответствует критерию охраноспособности изобретения «новизна».
Предложение при выполнении всех известных и новых действий способа позволяет достичь новых, ранее неизвестных технических результатов, следовательно, соответствует критерию охраноспособности изобретения «изобретательский уровень».
Способ идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в составе системы управления движением автопоезда
1 - ввод данных настроечных параметров математической модели автомобиля автопоезда;
2 - ввод данных о частотах вращения колес автомобиля автопоезда;
3 - вычисление параметров движения автомобиля автопоезда;
4 - вычисление нормальных составляющих динамической нагрузки на каждое колесо автомобиля автопоезда;
5 - вычисление тягово-тормозных сил, воздействующих на каждое колесо автомобиля автопоезда;
6 - решение обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения автомобиля автопоезда;
7 - фильтрация оценок максимальных значений коэффициентов трения скольжения колес автомобиля автопоезда;
8 - ввод данных настроечных параметров математической модели прицепа автопоезда;
9 - ввод данных о частотах вращения колес прицепа автопоезда;
10 - вычисление параметров движения прицепа автопоезда;
11 - вычисление нормальных составляющих динамической нагрузки на каждое колесо прицепа автопоезда;
12 - вычисление тягово-тормозных сил, воздействующих на каждое колесо прицепа автопоезда;
13 - решение обратной задачи кусочно-линейной аппроксимации коэффициента трения скольжения прицепа автопоезда;
14 - фильтрация оценок максимальных значений коэффициентов трения скольжения колес прицепа автопоезда;
15 - вывод данных на внешние устройства автопоезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации максимальных значений коэффициентов трения скольжения колёс автомобиля и прицепа в составе системы управления движением автопоезда | 2023 |
|
RU2812025C1 |
| Способ предотвращения сноса и заноса колёс системой помощи водителю автопоезда | 2023 |
|
RU2812000C1 |
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779539C1 |
| Система идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779538C1 |
| Способ предотвращения опрокидывания автопоезда | 2023 |
|
RU2811998C1 |
| Способ определения угловой скорости дополнительного рыскания колёс автопоезда | 2023 |
|
RU2812026C1 |
| Система предотвращения опрокидывания автопоезда | 2023 |
|
RU2811999C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ С ПРЕПЯТСТВИЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2335805C1 |
| Система контроля и предотвращения дополнительного рыскания колёс автомобиля | 2023 |
|
RU2812030C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙНОГО ПЕРЕГРЕВА ШИН И ТОРМОЗОВ АВТОМОБИЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2513439C1 |
Изобретение относится к автомобилестроению. В способе идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда регистрируют импульсы, формируемые датчиками частот вращения колес, передают импульсы в блок обработки информации, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес, и по значениям частот вращения колес определяют в реальном времени максимальные значения коэффициентов трения скольжения колес автомобиля и прицепа. Повышается безопасность управления движением автопоезда. 2 з.п. ф-лы, 3 ил.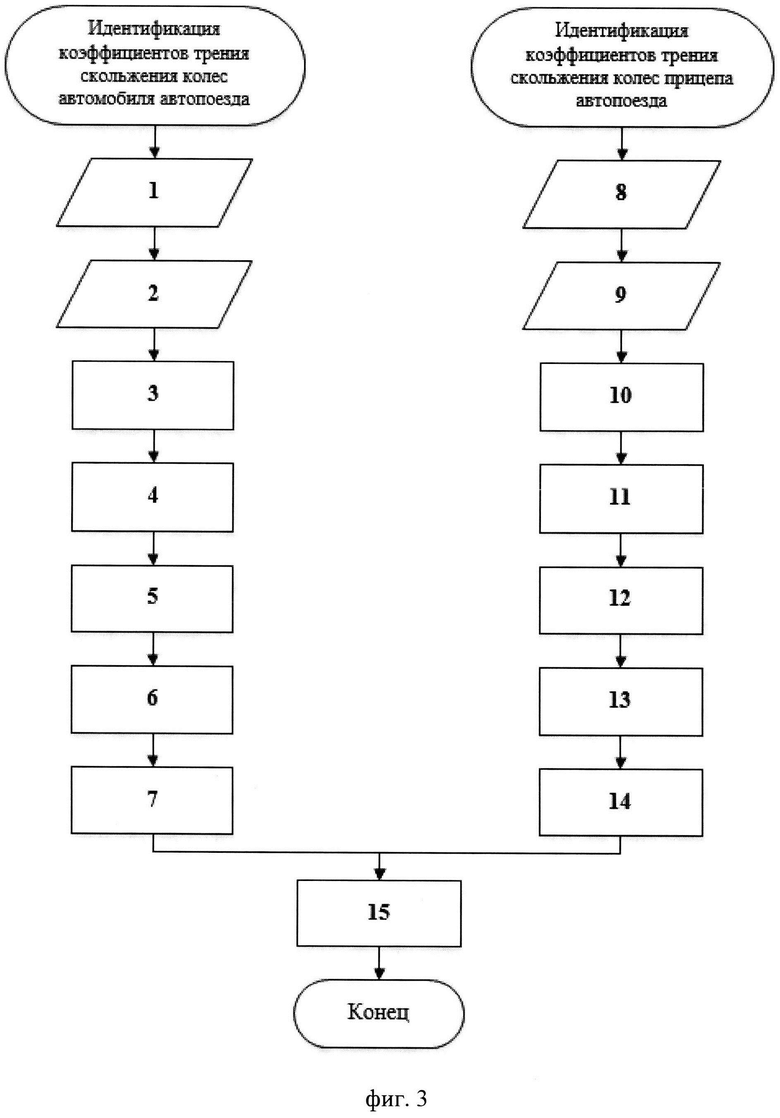
1. Способ идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда путем регистрации импульсов, формируемых датчиками частот вращения колес автомобиля, входящего в состав автопоезда, которые используются в качестве датчиков первичной информации о физических переменных, характеризующих состояние колес автомобиля, передачи импульсов на вход блока обработки информации автомобиля, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес автомобиля и по значениям частот вращения колес автомобиля определяют в реальном времени максимальные значения коэффициентов трения скольжения колес автомобиля как результат решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициентов трения скольжения колес автомобиля от скольжения, параметрически связанной с максимальным значением коэффициента трения скольжения на всех участках аппроксимации, и на выходе блока обработки информации автомобиля формируют сигнал с информацией о максимальных значениях коэффициентов трения скольжения колес автомобиля, отличающийся тем, что дополнительно регистрируют импульсы, формируемые датчиками частот вращения колес прицепа автопоезда, которые используют в качестве датчиков первичной информации о физических переменных, характеризующих состояние колес прицепа, импульсы передают на вход блока обработки информации прицепа, в котором определяют оценки максимальных значений коэффициентов трения скольжения колес прицепа и по значениям частот вращения колес прицепа определяют в реальном времени максимальные значения коэффициентов трения скольжения колес прицепа как результат решения обратной задачи кусочно-линейной аппроксимации зависимости коэффициентов трения скольжения колес прицепа от скольжения, связанной параметрически с максимальным значением коэффициента трения скольжения на всех участках аппроксимации, и на выходе блока обработки информации прицепа формируют сигнал с информацией о максимальных значениях коэффициентов трения скольжения колес прицепа, после чего численные значения сигналов с информацией о максимальных значениях коэффициентов трения скольжения колес отдельно для автомобиля и для прицепа передают в дополнительный информационно-управляющий блок автопоезда, в котором по результатам сравнения максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа формируют окончательные выходные данные, которые передают на средство визуального отображения информации водителя и на внешние блоки управления движением автопоезда для использования в качестве входных данных, обеспечивающих безопасное управление движением автопоезда.
2. Способ идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда по п. 1, отличающийся тем, что максимальные значения коэффициентов трения скольжения колес автомобиля и прицепа с двускатными колесами идентифицируют как единое целое путем регистрации импульсов, формируемых датчиками частот вращения колес, устанавливаемых со стороны внешних или внутренних скатов автомобиля и прицепа.
3. Способ идентификации максимальных значений коэффициентов трения скольжения колес автомобиля и прицепа в системе управления движением автопоезда по пп. 1, 2, отличающийся тем, что максимальные значения коэффициентов трения скольжения колес с количеством осей более двух у автомобиля и/или прицепа идентифицируют путем регистрации импульсов, формируемых датчиками частот вращения колес, устанавливаемых преимущественно на колесах внешних передней и задней осей автомобиля и прицепа.
| Способ идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779539C1 |
| Система идентификации максимальных значений коэффициентов трения скольжения колёс транспортного средства | 2022 |
|
RU2779538C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ИСПЫТАНИЯ ТОРМОЖЕНИЯ НА АВТОМОБИЛЯХ С ПРИЦЕПОМ И/ИЛИ ПОЛУПРИЦЕПОМ | 2011 |
|
RU2487807C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
| US 20020072842 A1, 13.06.2002 | |||
| US 20020087251 A1, 04.07.2002. | |||

