ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области систем безопасности и наблюдения, а более конкретно к технологиям, направленным на обнаружение тревожных траекторий движения объектов на местности с использованием заданных графических примитивов.
УРОВЕНЬ ТЕХНИКИ
Системы наблюдения могут использоваться для охраны помещений или территорий. Обычно такие системы используют видеокамеры для идентификации и отслеживания движений объектов в пределах охраняемой территории. Например, видеокамеры могут использоваться для обнаружения несанкционированного доступа людей или транспортных средств к охраняемой территории. Большинство систем наблюдения способны генерировать сигнал тревоги на основе наличия движущегося объекта в пределах контролируемой области.
К задачам, которые возможно решить посредством систем наблюдения, относятся: обнаружение объектов, слежение за движением объектов, классификация объектов, идентификация объектов, обнаружение или распознавание различных ситуаций, в том числе и тревожных, и т.д.
Допустим, есть карта местности с траекториями движения объектов на ней, полученными от GPS датчиков автомобилей. Оператор получает событие тревоги, если какой-то автомобиль поехал по запрещенному маршруту, либо въехал в запрещенную область и т.д. Под тревожным событием также понимается наличие тех или иных объектов, неподвижных или движущихся, а именно: их расположение, траектория движения и многие другие признаки. Объектом может быть человек, животное, транспортное средство (например, машина, велосипед), или любые предметы, передвигающиеся в поле зрения видеокамер или датчиков.
Кроме того, оператора могут интересовать траектории движения объектов, которые по каким-либо конкретным критериям стали более интересны, чем остальные. К примеру, траектория движения некоторого объекта может изменить свое направление и стать тревожной. В примере с автомобилями могут быть интересны траектории, которые долгое время находятся на территории предприятия, поскольку иногда это может говорить о потенциальном воровстве.
Для оптимизации процесса обнаружения тревожных траекторий движения объектов существуют различные технологии, например, задание правил классификации траекторий движения объектов, на предмет отнесения последних к тревожным.
Из уровня техники известно решение, раскрытое в патенте СА 2545535 С, G06K 9/00, опубл. 26.01.2016, в котором графический пользовательский интерфейс системы видеонаблюдения позволяет пользователю задавать видео «растяжку», при этом в качестве одного из правил обнаружения тревожных траекторий движения используется определение пересечения траектории объекта и «растяжки». Данная технология хоть и позволяет задавать «растяжку» и некоторые простые правила обнаружения тревожных траекторий движения объектов, однако она не позволяет задавать более сложные правила обнаружения тревожных траектории и осуществить классификацию траекторий по ним. Кроме того данное решение узко направлено только на обработку видеоданных и не подразумевает обработку потока данных, полученного от датчиков.
Также известно решение, раскрытое в заявке US 20150242691 A1, G06K 9/00, опубл. 27.08.2015, в котором описана система мониторинга, характеризующаяся наличием нескольких датчиков для контроля территории. Указанная система позволяет задавать область отслеживания и критерии тревоги для объектов, а также отслеживать объекты и определять на основании данных от датчиков, нарушил ли объект заданные критерии тревоги. Недостатком данного решения является невозможность задания графических примитивов, а также отсутствие возможности задавать правила классификации именно для траекторий движения объектов.
Наиболее близким по технической сущности является известное решение, раскрытое в одноименной заявке RU 2017131075 A1, G06T 1/00, характеризующее систему и способ, направленные на обнаружение тревожных траекторий движения объектов. Известное решение позволяет задавать правила классификации, классифицировать траектории движения объектов как тревожные и отправлять уведомления пользователю. Однако данная технология не содержит средств, позволяющих задавать графические примитивы, которые образуют между собой область отслеживания.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Заявляемое техническое решение направлено на устранение недостатков, присущих предшествующему уровню техники и на развитие уже известных решений.
Техническим результатом заявленной группы изобретений является расширение арсенала технических средств, в части обнаружения тревожных траекторий движения объектов, за счет задания графических примитивов и проверки на предмет тревожности каждой траектории движения объектов по правилам, связанным с заданными графическими примитивами.
Данный технический результат достигается за счет того, что компьютерная система обнаружения тревожных траекторий движения объектов, содержит: по меньшей мере, один процессор; память, выполненную с возможностью хранить исходные данные; по меньшей мере, одно устройство захвата данных, выполненное с возможностью сбора и предоставления потока данных, включающего метаданные объектов, причем метаданные включают в себя, по меньшей мере, набор положений объектов в определенные моменты времени; графический пользовательский интерфейс, выполненный с возможностью обработки метаданных объектов и содержащий средства ввода и вывода данных, причем упомянутые средства ввода данных содержат: блок задания графических примитивов, выполненный с возможностью задания, по меньшей мере, одного графического примитива посредством выбора нескольких точек в системе координат исходных данных, связанных с потоком данных, поступающим от устройства захвата данных, причем набор заданных графических примитивов образует между собой область отслеживания; блок задания правил классификации, выполненный с возможностью задания правил определения того, какие траектории движения объектов являются тревожными по отношению к области отслеживания; блок классификации траекторий движения объектов, выполненный с возможностью проверки каждой траектории движения по правилам, заданным в блоке задания правил классификации, для выявления тревожных траекторий движения объектов, причем блок классификации траекторий движения объектов дополнительно выполнен с возможностью отправки уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного интервала времени.
Указанный технический результат также достигается за счет способа обнаружения тревожных траекторий движения объектов, реализуемого компьютерной системой и содержащего этапы, на которых: осуществляют сбор и предоставление потока данных, включающего метаданные объектов, причем метаданные включают в себя, по меньшей мере, набор положений объектов в определенные моменты времени; задают, по меньшей мере, один графический примитив посредством выбора нескольких точек в системе координат исходных данных, связанных с потоком данных, поступающим от устройства захвата данных, причем набор заданных графических примитивов образует между собой область отслеживания; задают правила классификации для определения того, какие траектории движения объектов являются тревожными по отношению к области отслеживания; осуществляют проверку каждой траектории движения по заданным правилам классификации для выявления тревожных траекторий движения объектов; и осуществляют отправку уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного интервала времени.
В одном частном варианте заявленного решения исходные данные могут являться картой местности или изображением, полученным от устройства захвата данных, причем карта местности может быть привязана к потоку данных.
В еще одном частном варианте заявленного решения пользовательский интерфейс дополнительно выполнен с возможностью отображения координат объектов на исходных данных.
В другом частном варианте заявленного решения координаты объектов могут быть двухмерными или трехмерными.
В еще одном частном варианте заявленного решения поток данных представляет собой видеопоток или поток метаданных объектов.
В другом частном варианте заявленного решения графический примитив может являться виртуальной двухмерной или трехмерной поверхностью.
В еще одном частном варианте заявленного решения двухмерная поверхность являться, по меньшей мере, одним из: отрезка, прямой линии, кривой линии, ломаной линии, полилинии, дуги.
В другом частном варианте заявленного решения трехмерная поверхность является, по меньшей мере, одним из: плоскости, ломаной поверхности, плавно-изогнутой поверхности, мульти-сегментной поверхности.
В еще одном частном варианте заявленного решения графические примитивы из набора графических примитивов могут быть расположены произвольно, параллельно или под заданным углом друг относительно друга.
В другом частном варианте заявленного решения область отслеживания является коридором, ограниченным заданными графическими примитивами.
В еще одном частном варианте заявленного решения к правилу классификации относится факт полного прохождения объектом заданного коридора в заданном направлении движения по траектории, которая полностью расположена внутри упомянутого коридора.
В другом частном варианте заявленного решения к правилу классификации относится факт полного прохождения объектом нескольких заданных коридоров подряд в заданных для каждого коридора направлениях движения по траектории, которая расположена внутри каждого из упомянутых нескольких коридоров.
В еще одном частном варианте заявленного решения при задании правил классификации блоком задания правил классификации задаются, по меньшей мере, следующие параметры объекта: направление движения, тип, цвет, минимально допустимая скорость движения, максимально допустимая скорость движения, минимально допустимый размер, максимально допустимый размер.
В другом частном варианте заявленного решения к типам объекта относятся: человек, группа людей или транспортное средство.
В еще одном частном варианте заявленного решения в качестве дополнительных характеристик объекта могут быть заданы, по меньшей мере, пол объекта или наличие у объекта, по меньшей мере, одного из: сумки, зонта, головного убора, усов, бороды.
В другом частном варианте заявленного решения правила классификации дополнительно зависят от типа устройства захвата данных, которое предоставляет метаданные.
В еще одном частном варианте заявленного решения устройство захвата данных может являться, по меньшей мере, одним из: видеокамеры, GPS датчика, ГЛОНАСС датчика, детектора объектов.
В другом частном варианте заявленного решения устройство захвата данных является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты, при этом данное устройство сообщает идентификатор владельца браслета, а в зависимости от типа этого идентификатора, определяется, оповещать ли о тревоге.
В еще одном частном варианте заявленного решения упомянутое уведомление пользователя может быть, по меньшей мере, визуальным, звуковым, текстовым или их комбинацией.
В другом частном варианте заявленного решения память дополнительно выполнена с возможностью записи и хранения архива данных, получаемых, по меньшей мере, от одного устройства захвата данных, причем компьютерная система дополнительно сконфигурирована для обнаружения тревожных траекторий по архивным данным.
Данный технический результат также достигается за счет считываемого компьютером носителя, содержащего исполняемые процессором компьютера инструкции для осуществления вышеупомянутых способов обнаружения тревожных траекторий движения объектов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
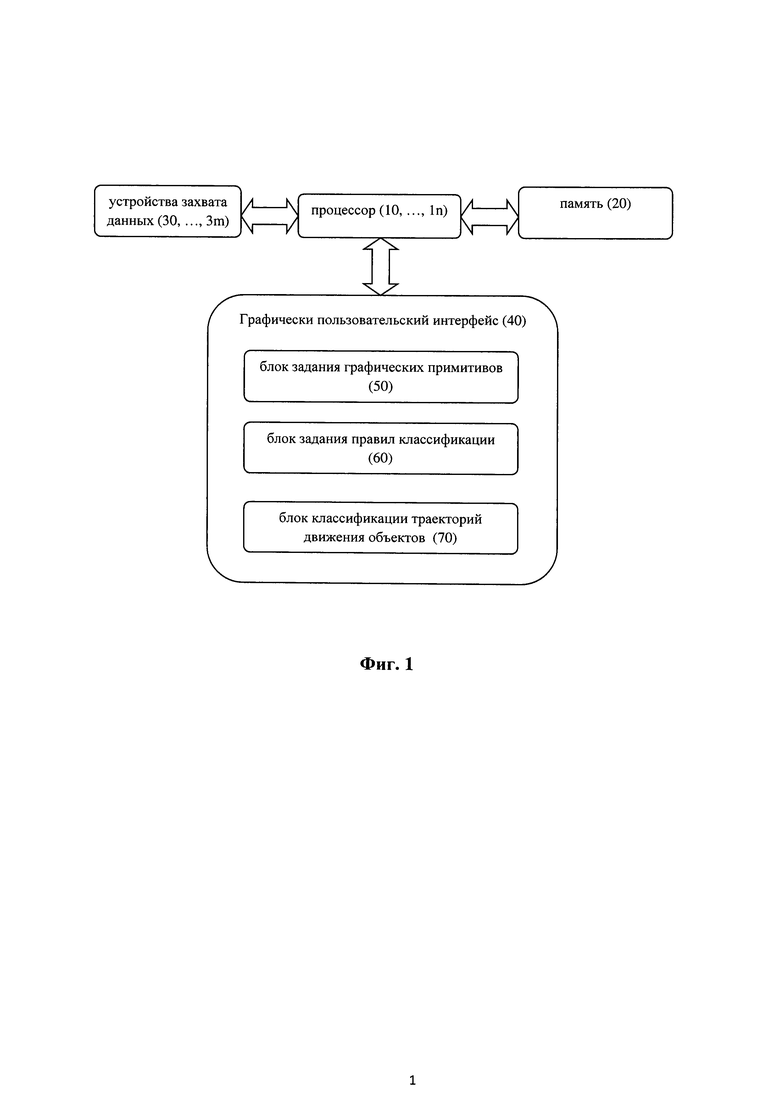
Фиг. 1 - блок-схема компьютерной системы обнаружения тревожных траекторий движения объектов;
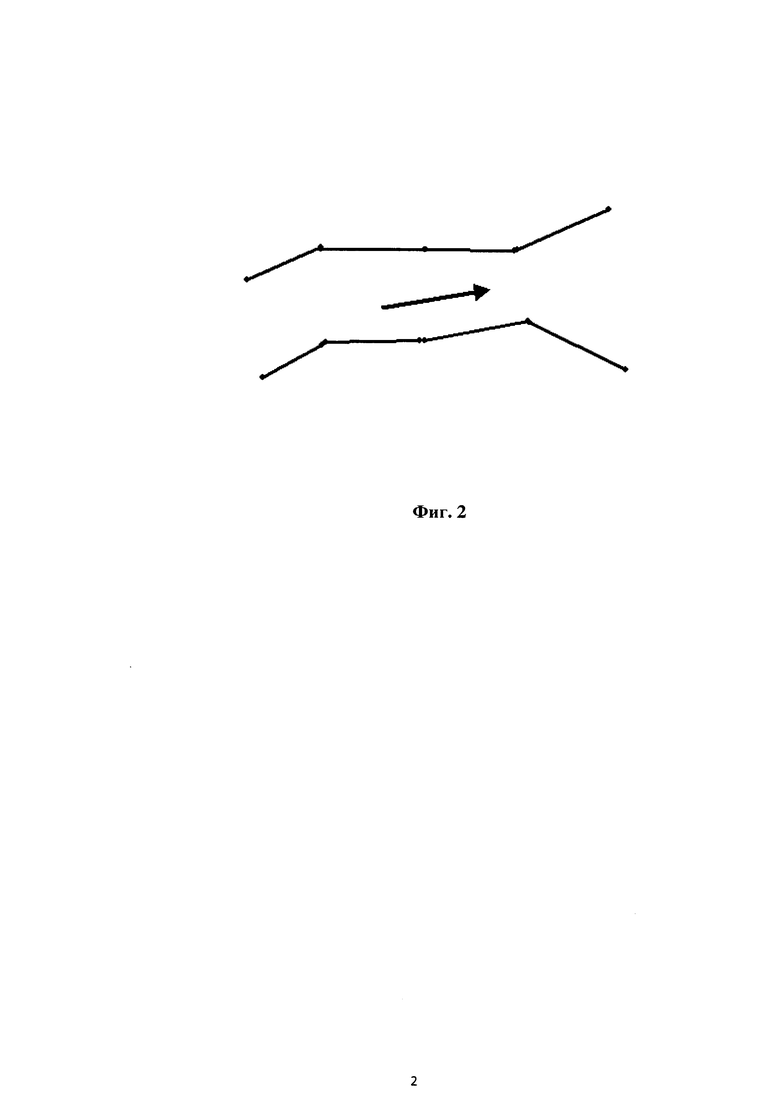
Фиг. 2 - пример области отслеживания в виде коридора, ограниченного графическими примитивами;
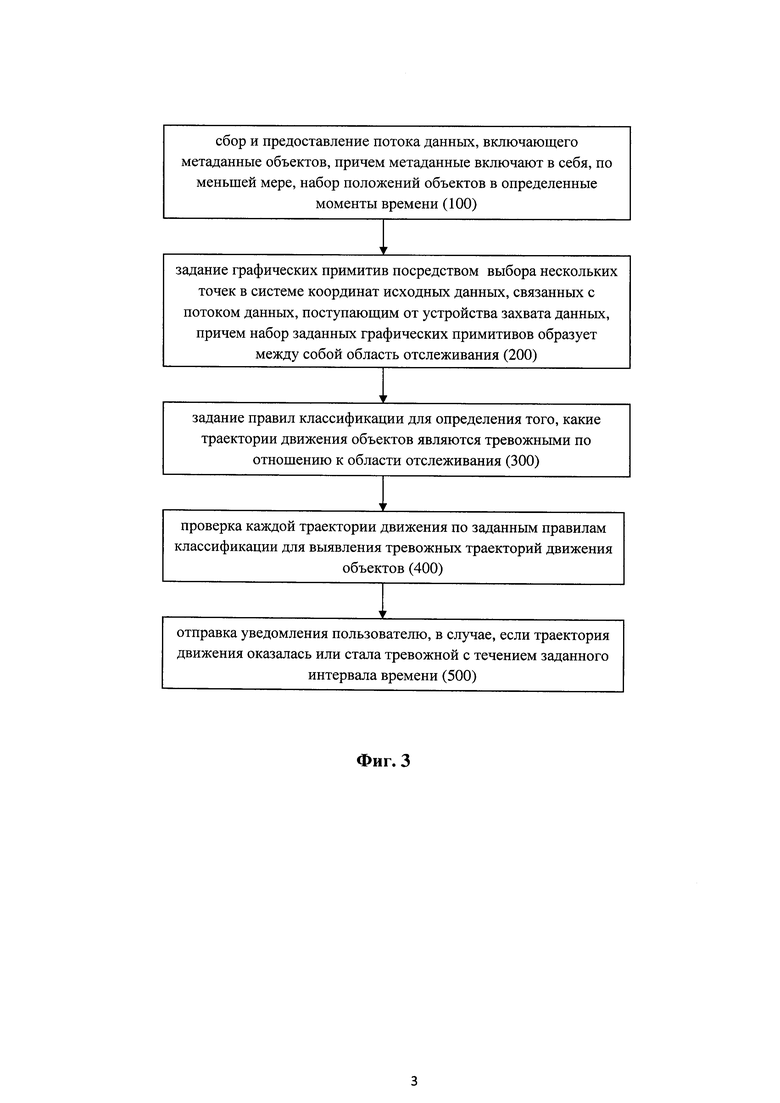
Фиг. 3 - блок-схема одного из вариантов реализации способа обнаружения тревожных траекторий движения объектов;
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже будет приведено описание примерных вариантов осуществления заявленной группы изобретений. Однако заявленная группа изобретений не ограничивается только этими вариантами осуществления. Специалистам будет очевидно, что под объем заявленной группы изобретений, описанной в формуле, могут попадать и другие варианты реализации.
Заявляемое техническое решение в различных своих вариантах осуществления может быть выполнено в виде компьютерных систем и способов для обнаружения тревожных траекторий движения объектов, а также в виде считываемого компьютером носителя данных.
На фиг. 1 представлена блок-схема одного из вариантов реализации системы обнаружения тревожных траекторий движения объектов. В базовой комплектации система включает в себя: по меньшей мере, один процессор (10, …, 1n); память (20); по меньшей мере, одно устройство захвата данных (30, …, 3n); и графический пользовательский интерфейс (40), который в свою очередь содержит: блок задания графических примитивов (50), блок задания правил классификации (60) и блок классификации траекторий движения объектов (70). Указанные блоки пользовательского интерфейса представляют собой средства ввода данных, при этом пользовательский интерфейс содержит и средства вывода данных (не показаны).
В данном контексте под компьютерными системами понимаются любые вычислительные системы, построенные на базе программно-аппаратных средств, например, такие как: персональные компьютеры, смартфоны, ноутбуки, планшеты и т.д.
Процессор компьютерной системы в отдельных вариантах ее реализации может быть заменен на: микропроцессор, ЭВМ (электронно-вычислительная машина), ПЛК (программируемый логический контроллер) или интегральную схему.
В роли устройства памяти могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD) и т.д.
Под устройствами захвата данных понимаются любые вычислительные устройства, которые могут предоставлять метаданные объектов. Устройство захвата данных может являться одним из: видеокамеры, GPS датчика, ГЛОНАСС датчика, детектора объектов. В некоторых реализациях устройство захвата данных может являться браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты.
Графический пользовательский интерфейс (ГПИ) представляет собой систему средств для взаимодействия пользователя с компьютерной системой, основанную на представлении всех доступных пользователю системных объектов и функций в виде графических компонентов экрана (окон, значков, меню, кнопок, списков и т.п.). При этом пользователь имеет произвольный доступ (с помощью устройств ввода данных) ко всем видимым экранным объектам - блокам интерфейса, которые отображаются на дисплее (мониторе). Устройство ввода данных может представлять собой, но не ограничиваться, например, манипулятор мышь, клавиатуру, тачпад, стилус, джойстик, трекпад и т.п.
Следует отметить, что в указанную компьютерную систему могут входить и любые другие известные в данном уровне техники устройства.
Далее будет описан пример работы вышеупомянутой компьютерной системы обнаружения тревожных траекторий. При этом будут использованы некоторые термины и их значения, приведенные ниже.
Поток данных - информация, получаемая от устройств захвата данных и включающая метаданные объектов.
Исходные данные - карта местности или изображение (кадр, снимок), полученное от устройств захвата данных заранее.
Область отслеживания - область, ограниченная графическими примитивами.
Работа компьютерной системы начинается с того, что, по меньшей мере, одно устройство захвата данных получает поток данных. Указанный поток данных содержит метаданные объектов, причем метаданные включают в себя, по меньшей мере, набор положений (координат) объектов в определенные моменты времени. Поток данных может представлять собой видеопоток, если устройство захвата данных является видеокамерой, или же поток метаданных объектов, если устройство захвата данных является датчиком или детектором объектов.
Следует отметить, что память компьютерной системы хранит исходные данные, которые в зависимости от типа устройства захвата данных могут являться картой местности или изображением (кадром). В случае получения данных от датчиков, поток поступающих данных привязан к карте местности.
Далее полученный поток данных попадает в графический пользовательский интерфейс для обработки метаданных объектов. В некоторых реализациях системы пользовательский интерфейс выполнен с возможностью отображения координат объектов на исходных данных, что позволяет оператору более наглядно оценивать и контролировать ситуацию на охраняемой территории. Координаты объектов могут быть двухмерными или трехмерными в зависимости от выбранного оператором представления данных. Как уже было указано ранее, графический пользовательский интерфейс содержит средства ввода и вывода данных для взаимодействия пользователя с системой.
Для того чтобы задать графические примитивы оператор открывает блок задания графических примитивов. В контексте данного описания графический примитив - это виртуальная двухмерная или трехмерная поверхность, причем двухмерная поверхность являться, по меньшей мере, одним из: отрезка, прямой линии, кривой линии, ломаной линии, полилинии, дуги и т.д., а трехмерная поверхность является, по меньшей мере, одним из: плоскости, ломаной поверхности, плавно-изогнутой поверхности, мульти-сегментной поверхности и т.д.
В данном блоке оператор может задавать один или несколько графических примитивов посредством выбора нескольких точек в системе координат исходных данных. Для этого оператор может использовать устройства ввода данных, например компьютерную мышь. Если исходными данными является карта местности, то оператор (или пользователь компьютерной системы) может видеть территорию охраняемого объекта (или объекта контроля) и располагать графические примитивы так, чтобы наилучшим образом определять тревожные траектории движений объектов, находящихся в охраняемой зоне. В данном случае координаты объектов накладываются на карту местности и оператор видит перемещение всех объектов в охраняемой зоне. Аналогично работа происходит и в случае видеоданных, отображаемых на дисплее.
Оператор может задать несколько графических примитивов, то есть набор, который образует область отслеживания. Например, пользователь может задать два параллельных друг другу графических примитива в виде отрезков и тогда область между ними будет являться областью отслеживания. Тем не менее, даже один заданный графический примитив образует область отслеживания, по отношению к которой анализируются траектории движения объектов.
В случае задания набора графических примитивов оператор никак не ограничен в способе их расположения. То есть, примитивы могут быть расположены абсолютно произвольно по отношению друг к другу, или же могут быть соблюдены некоторые правила, которые задаются оператором в настройках. Например, в некоторых реализациях, графические примитивы могут быть расположены параллельно. В других реализациях пользователь может задать конкретный угол, под которым будут располагаться графические примитивы.
Как уже было отмечено ранее, набор графических примитивов может задавать область отслеживания. Для примера, на фиг. 2 представлена область отслеживания, которая образует коридор, ограниченный несколькими графическими примитивами. Внутри указанного коридора расположена стрелка, которая показывает необходимое направление движения объекта для того, чтобы траектория его движения была расценена как тревожная. Если объект пройдет по заданному коридору в другом направлении, то система никак не будет реагировать на такую траекторию движения объекта.
Далее, в блоке задания правил классификации оператор может задавать конкретные правила определения того, какие траектория движения объектов считать тревожными по отношению к заданной области отслеживания.
На начальном этапе блок задания правил классификации позволяет оператору задавать, по меньшей мере, следующие параметры объекта: направление движения, тип, цвет, минимально допустимую скорость движения, максимально допустимую скорость движения, минимально допустимый размер, максимально допустимый размер. Примерами типа объекта являются: человек, группа людей или транспортное средство. Кроме того, могут быть заданы дополнительные характеристики объекта, например, такие, как пол объекта или наличие у объекта, по меньшей мере, одного из: сумки, зонта, головного убора, усов, бороды. Данные параметры могут быть заданы частично или же в полном объеме для более детальной и точной классификации траекторий движения объектов. Следует понимать, что правила классификации дополнительно зависят и от типа устройства захвата данных, которое предоставляет метаданные. К примеру, в случае, если устройство захвата данных является видеокамерой, следует учитывать цвет объектов.
После задания необходимых параметров оператор задает конкретные правила классификации траекторий движения объектов. Например, простыми правилами могут являться: факт попадания (появления) траектории, по меньшей мере, одного объекта в область отслеживания; факт покидания (исчезновения) траектории, по меньшей мере, одного объекта области отслеживания; факт начала движения объекта; факт остановки объекта; определение временной длительности нахождения траектории движения, по меньшей мере, одного объекта внутри заданной области отслеживания. Кроме того, в компьютерной системе могут быть заданы правила, в которых траектория движения объекта пересекала бы все заданные графические примитивы в определенном порядке или в течение определенного периода времени.
К более сложным правилам относится факт полного прохождения объектом заданной области отслеживания, например, коридора в заданном направлении движения по траектории, которая полностью расположена внутри упомянутого коридора. Еще одним правилом является факт полного прохождения объектом нескольких заданных коридоров подряд в заданных для каждого коридора направлениях движения по траектории, которая расположена внутри каждого из упомянутых нескольких коридоров. Например, есть охраняемое предприятие с большим количеством комнат и коридоров. Чтобы попасть на склад, объект, например человек, должен пройти через три заданных оператором коридора в определенной последовательности и в определенном направлении для того, чтобы траектория его движения стала тревожной. Если человек прошел только два из заданных коридоров, а потом развернулся или же пошел в другом направлении по третьему коридору, то траектория движения этого человеке не будет являться тревожной. Такой подход, а именно задание нескольких коридоров, позволяет избегать ложных определений траекторий как тревожных. Следует отметить, что в блоке задания правил могут быть заданы иные правила или любые комбинации указанных выше правил, которые не ограничиваются вышеприведенными примерами.
После того как правила классификации заданы, а поток данных поступает, компьютерная система приступает к классификации траекторий движения объектов посредством блока классификации траекторий движения объектов. Блок классификации траекторий движения объектов проверяет каждую траекторию по заданным правилам для выявления тревожных траекторий движения объектов. Функции проверки могут быть настроены в зависимости от конкретного факта и/или сразу нескольких фактов, которые могут говорить о наличии тревожных признаков у той или иной траектории движения объекта. При этом в системе предусмотрена возможность присвоение тревожным траекториям степени тревожности: высокая, средняя, низкая, ложная.
Кроме того, блок классификации траекторий движения объектов дополнительно выполнен с возможностью отправки уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного интервала времени. Такие уведомления могут быть, по меньшей мере, визуальными, звуковыми, текстовыми или любой их комбинацией. Пользователь и/или оператор может задать время и приемлемый для него вид оповещения посредством пользовательского интерфейса. Например, если траектория движения объекта стала тревожной с течением заданного интервала времени (например, 15 минут), пользователю тут же придет об этом уведомление. Уведомление пользователя может быть в виде SMS или MMS, с указанием конкретных параметров объекта с тревожной траекторией движения.
В случае если устройство захвата данных является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты объекта, указанное устройство может сообщать компьютерной системе идентификатор владельца браслета, по которому система определяет, оповещать ли о тревоге или нет.
Хотя работа компьютерной системы была описана с учетом того, что поток данных поступает в реальном времени и классификация траекторий движения объектов, соответственно, выполняется в реальном времени, однако, иногда необходимо отслеживать траектории и по архивным данным. Для такого случая память компьютерной системы сконфигурирована для записи и хранения архива данных, получаемых от устройств захвата данных, при этом сама компьютерная система дополнительно сконфигурирована для обнаружения тревожных траекторий по архивным данным.
Например, некоторые охраняемые предприятия не имеют круглосуточной охраны, то есть оператор следит за происходящим только в дневное время. В таком случае каждый день компьютерная система может выполнять полную проверку архивных данных, полученных от устройств захвата данных в ночное время. Кроме того, оператор может настроить конкретное время анализа данных, например, так, чтобы каждый день в 8 часов утра система выполняла анализ архивных данных на предмет тревожных траекторий движения объектов. Другим примером может являться тот случай, когда охранная организация взяла на себя новую территорию для охраны. Если данная территория была оснащена устройствами захвата данных, то с помощью описанной компьютерной системы по сохраненным архивным данным можно провести анализ траекторий движения объектов за требуемый промежуток времени, например за тот день или месяц, когда предположительно была произведена кража или любое другое нарушение.
На фиг. 3 представлена блок-схема одного из вариантов реализации способа обнаружения тревожных траекторий движения объектов. Указанный способ содержит этапы, на которых:
(100) осуществляют сбор и предоставление потока данных, включающего метаданные объектов, причем метаданные включают в себя, по меньшей мере, набор положений объектов в определенные моменты времени;
(200) задают, по меньшей мере, один графический примитив посредством выбора нескольких точек в системе координат исходных данных, связанных с потоком данных, поступающим от устройства захвата данных, причем набор заданных графических примитивов образует между собой область отслеживания;
(300) задают правила классификации для определения того, какие траектории движения объектов являются тревожными по отношению к области отслеживания;
(400) осуществляют проверку каждой траектории движения по заданным правилам классификации для выявления тревожных траекторий движения объектов; и
(500) осуществляют отправку уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного интервала времени.
Следует отметить, что данный способ выполняется (реализуется) компьютерной системой и, следовательно, может быть расширен и уточнен всеми теми же частными вариантами исполнения, которые уже были описаны выше для реализации компьютерной системы.
Кроме того, варианты осуществления настоящей группы изобретений могут быть реализованы с использованием программного обеспечения, аппаратных средств, программной логики или их комбинации. В примере осуществления программная логика, программное обеспечение или набор инструкций хранятся на одном из различных традиционных машиночитаемых носителей, то есть на считываемом компьютером носителе данных.
В контексте данного документа «считываемым компьютером носителем данных» может быть любая среда или средства, которые могут содержать, хранить, передавать, распространять или транспортировать инструкции для их использования (исполнения) компьютерной системой, такой как компьютер. Машиночитаемый носитель может являться энергонезависимым машиночитаемым носителем данных.
В одном из примеров осуществления заявляемого решения может быть предложена схема пользовательского интерфейса, сконфигурированная для обеспечения, по меньшей мере, некоторых функций управления, описанных выше.
При необходимости, по меньшей мере, часть различных операций, рассмотренных в описании данного решения, может быть выполнена в отличном от представленного порядке и/или одновременно друг с другом.
Хотя данное техническое решение было описано подробно в целях иллюстрации наиболее практичных в настоящее время и предпочтительных вариантов осуществления, следует понимать, что данное изобретение не ограничивается раскрытыми вариантами осуществления и более того, предназначено для модификации и различных других комбинаций признаков из описанных вариантов осуществления. Например, следует понимать, что настоящее изобретение предполагает, что в возможной степени, один или более признаков любого варианта осуществления могут быть объединены с другим одним или более признаками любого другого варианта осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМЫ И СПОСОБЫ ОБНАРУЖЕНИЯ ТРЕВОЖНЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ОБЪЕКТОВ | 2017 |
|
RU2688739C2 |
| СИСТЕМА И СПОСОБ ПОИСКА ОБЪЕКТОВ ПО ТРАЕКТОРИЯМ ДВИЖЕНИЯ НА ПЛАНЕ МЕСТНОСТИ | 2018 |
|
RU2701985C1 |
| Способ автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств | 2022 |
|
RU2779971C1 |
| СИСТЕМА И СПОСОБ ОТОБРАЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ НА КАРТЕ МЕСТНОСТИ | 2020 |
|
RU2742582C1 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ ОТЧЕТОВ НА ОСНОВАНИИ АНАЛИЗА МЕСТОПОЛОЖЕНИЯ И ВЗАИМОДЕЙСТВИЯ СОТРУДНИКОВ И ПОСЕТИТЕЛЕЙ | 2020 |
|
RU2756780C1 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ПО ВИДЕОДАННЫМ | 2021 |
|
RU2775162C1 |
| Устройство и способ управления системой видеонаблюдения в реальном времени в режиме фиксации тревожных событий | 2017 |
|
RU2688735C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБРАБОТКИ ВИДЕОДАННЫХ ИЗ АРХИВА | 2019 |
|
RU2710308C1 |
| СИСТЕМА И СПОСОБ СОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2019 |
|
RU2701092C1 |
| СИСТЕМА И СПОСОБ ОБЪЕДИНЕНИЯ НЕСКОЛЬКИХ ВИДЕОИЗОБРАЖЕНИЙ В ОДНО ПАНОРАМНОЕ ВИДЕОИЗОБРАЖЕНИЕ | 2019 |
|
RU2706576C1 |
Изобретение относится к области систем безопасности и наблюдения. Технический результат – расширение арсенала технических средств в части обнаружения тревожных траекторий движения объектов, за счет задания графических примитивов. Компьютерная система обнаружения тревожных траекторий движения объектов содержит: процессор; память; по меньшей мере, одно устройство захвата данных, для сбора и предоставления потока данных, включающего метаданные объектов; графический пользовательский интерфейс, для обработки метаданных объектов и содержащий средства ввода и вывода данных. Упомянутые средства ввода данных содержат: блок задания графических примитивов, выполненный с возможностью задания, по меньшей мере, одного графического примитива, причем набор заданных графических примитивов образует между собой область отслеживания; блок задания правил классификации, для задания правил определения того, какие траектории движения объектов являются тревожными по отношению к области отслеживания; и блок классификации траекторий движения объектов, выполненный с возможностью проверки каждой траектории движения по упомянутым правилам, для выявления тревожных траекторий движения объектов, а также с возможностью отправки уведомления пользователю. 3 н. и 38 з.п. ф-лы, 3 ил.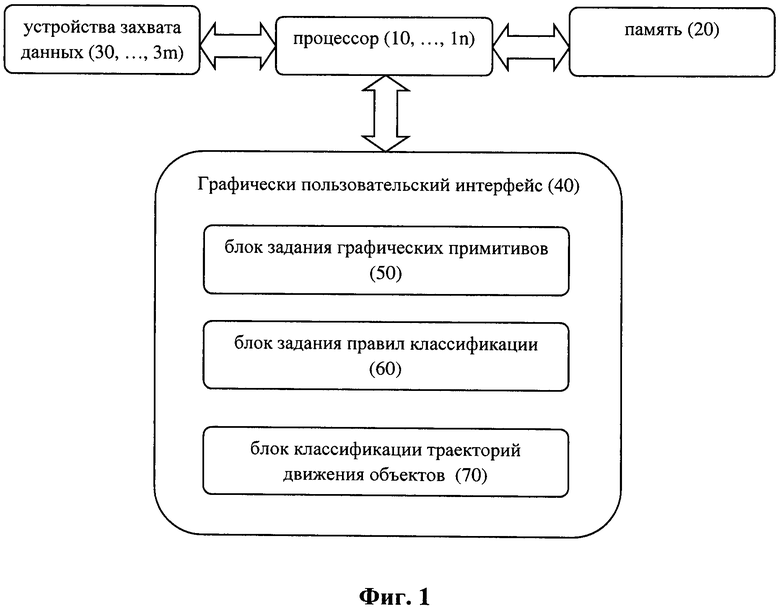
1. Компьютерная система обнаружения тревожных траекторий движения объектов, содержащая:
по меньшей мере, один процессор;
память, выполненную с возможностью хранить исходные данные;
по меньшей мере, одно устройство захвата данных, выполненное с возможностью сбора и предоставления потока данных, включающего метаданные объектов, причем метаданные включают в себя, по меньшей мере, набор положений объектов в определенные моменты времени;
графический пользовательский интерфейс, выполненный с возможностью обработки метаданных объектов и содержащий средства ввода и вывода данных, причем упомянутые средства ввода данных содержат:
блок задания графических примитивов, выполненный с возможностью задания, по меньшей мере, одного графического примитива посредством выбора нескольких точек в системе координат исходных данных, связанных с потоком данных, поступающим от устройства захвата данных, причем набор заданных графических примитивов образует между собой область отслеживания;
блок задания правил классификации, выполненный с возможностью задания правил определения того, какие траектории движения объектов являются тревожными по отношению к области отслеживания;
блок классификации траекторий движения объектов, выполненный с возможностью проверки каждой траектории движения по правилам, заданным в блоке задания правил классификации, для выявления тревожных траекторий движения объектов, причем блок классификации траекторий движения объектов дополнительно выполнен с возможностью отправки уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного интервала времени.
2. Компьютерная система по п. 1, в которой исходные данные могут являться картой местности или изображением, полученным от устройства захвата данных, причем карта местности может быть привязана к потоку данных.
3. Компьютерная система по п. 2, в которой пользовательский интерфейс дополнительно выполнен с возможностью отображения координат объектов на исходных данных.
4. Компьютерная система по п. 3, в которой координаты объектов могут быть двухмерными или трехмерными.
5. Компьютерная система по любому из пп. 1, 2, в которой поток данных представляет собой видеопоток или поток метаданных объектов.
6. Компьютерная система по п. 1, в которой графический примитив может являться виртуальной двухмерной или трехмерной поверхностью.
7. Компьютерная система по п. 6, в которой двухмерная поверхность являться, по меньшей мере, одним из: отрезка, прямой линии, кривой линии, ломаной линии, полилинии, дуги.
8. Компьютерная система по п. 6, в которой трехмерная поверхность является, по меньшей мере, одним из: плоскости, ломаной поверхности, плавно-изогнутой поверхности, мульти-сегментной поверхности.
9. Компьютерная система по п. 6, в которой графические примитивы из набора графических примитивов могут быть расположены произвольно, параллельно или под заданным углом друг относительно друга.
10. Компьютерная система по любому из пп. 1, 9, отличающаяся тем, что область отслеживания является коридором, ограниченным заданными графическими примитивами.
11. Компьютерная система по п. 10, отличающаяся тем, что к правилу классификации относится факт полного прохождения объектом заданного коридора в заданном направлении движения по траектории, которая полностью расположена внутри упомянутого коридора.
12. Компьютерная система по п. 10, отличающаяся тем, что к правилу классификации относится факт полного прохождения объектом нескольких заданных коридоров подряд в заданных для каждого коридора направлениях движения по траектории, которая расположена внутри каждого из упомянутых нескольких коридоров.
13. Компьютерная система по любому из пп. 1, 11-12, в которой при задании правил классификации блоком задания правил классификации задаются, по меньшей мере, следующие параметры объекта: направление движения, тип, цвет, минимально допустимая скорость движения, максимально допустимая скорость движения, минимально допустимый размер, максимально допустимый размер.
14. Компьютерная система по п. 13, в которой к типам объекта относятся: человек, группа людей или транспортное средство.
15. Компьютерная система по п. 13, в которой в качестве дополнительных характеристик объекта могут быть заданы, по меньшей мере, пол объекта или наличие у объекта, по меньшей мере, одного из: сумки, зонта, головного убора, усов, бороды.
16. Компьютерная система по п. 1, в которой правила классификации дополнительно зависят от типа устройства захвата данных, которое предоставляет метаданные.
17. Компьютерная система по п. 16, в которой устройство захвата данных может являться, по меньшей мере, одним из: видеокамеры, GPS датчика, ГЛОНАСС датчика, детектора объектов.
18. Компьютерная система по п. 16, в которой устройство захвата данных является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты, при этом данное устройство сообщает идентификатор владельца браслета, а в зависимости от типа этого идентификатора, определяется, оповещать ли о тревоге.
19. Компьютерная система по п. 1, в которой упомянутое уведомление пользователя может быть, по меньшей мере, визуальным, звуковым, текстовым или их комбинацией.
20. Компьютерная система по п. 1, в которой память дополнительно выполнена с возможностью записи и хранения архива данных, получаемых, по меньшей мере, от одного устройства захвата данных, причем компьютерная система дополнительно сконфигурирована для обнаружения тревожных траекторий по архивным данным.
21. Способ обнаружения тревожных траекторий движения объектов, реализуемый компьютерной системой и содержащий этапы, на которых:
осуществляют сбор и предоставление потока данных, включающего метаданные объектов, причем метаданные включают в себя, по меньшей мере, набор положений объектов в определенные моменты времени;
задают, по меньшей мере, один графический примитив посредством выбора нескольких точек в системе координат исходных данных, связанных с потоком данных, поступающим от устройства захвата данных, причем набор заданных графических примитивов образует между собой область отслеживания;
задают правила классификации для определения того, какие траектории движения объектов являются тревожными по отношению к области отслеживания;
осуществляют проверку каждой траектории движения по заданным правилам классификации для выявления тревожных траекторий движения объектов; и
осуществляют отправку уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного интервала времени.
22. Способ по п. 21, отличающийся тем, что исходные данные могут являться картой местности или изображением, полученным от устройства захвата данных, причем карта местности может быть привязана к потоку данных.
23. Способ по п. 22, отличающийся тем, что дополнительно выполнен с возможностью побуждать пользовательский интерфейс отображать координаты объектов на исходных данных.
24. Способ по п. 23, отличающийся тем, что координаты объектов могут быть двухмерными или трехмерными.
25. Способ по любому из пп. 21, 22, отличающийся тем, что поток данных представляет собой видеопоток или поток метаданных объектов.
26. Способ по п. 21, отличающийся тем, что графический примитив может являться виртуальной двухмерной или трехмерной поверхностью.
27. Способ по п. 26, отличающийся тем, что двухмерная поверхность является, по меньшей мере, одним из: отрезка, прямой линии, кривой линии, ломаной линии, полилинии, дуги.
28. Способ по п. 26, отличающийся тем, что трехмерная поверхность является, по меньшей мере, одним из: плоскости, ломаной поверхности, плавно-изогнутой поверхности, мульти-сегментной поверхности.
29. Способ по п. 26, отличающийся тем, что графические примитивы из набора графических примитивов могут быть расположены произвольно, параллельно или под заданным углом друг относительно друга.
30. Способ по любому из пп. 21, 29, отличающийся тем, что область отслеживания является коридором, ограниченным заданными графическими примитивами.
31. Способ по п. 30, отличающийся тем, что к правилу классификации относится факт полного прохождения объектом заданного коридора в заданном направлении движения по траектории, которая полностью расположена внутри упомянутого коридора.
32. Способ по п. 30, отличающийся тем, что к правилу классификации относится факт полного прохождения объектом нескольких заданных коридоров подряд в заданных для каждого коридора направлениях движения по траектории, которая расположена внутри каждого из упомянутых нескольких коридоров.
33. Способ по любому из пп. 21, 31-32, отличающийся тем, что при задании правил классификации задаются, по меньшей мере, следующие параметры объекта: направление движения, тип, цвет, минимально допустимая скорость движения, максимально допустимая скорость движения, минимально допустимый размер, максимально допустимый размер.
34. Способ по п. 33, в котором к типам объекта относятся: человек, группа людей или транспортное средство.
35. Способ по п. 33, в котором в качестве дополнительных характеристик объекта могут быть заданы, по меньшей мере, пол объекта или наличие у объекта, по меньшей мере, одного из: сумки, зонта, головного убора, усов, бороды.
36. Способ по п. 21, в котором правила классификации дополнительно зависят от типа устройства захвата данных, которое предоставляет метаданные.
37. Способ по п. 36, в котором устройство захвата данных может являться, по меньшей мере, одним из: видеокамеры, GPS датчика, ГЛОНАСС датчика, детектора объектов.
38. Способ по п. 36, в котором устройство захвата данных является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты, при этом данное устройство сообщает идентификатор владельца браслета, а в зависимости от типа этого идентификатора, определяется, оповещать ли о тревоге.
39. Способ по п. 21, в котором упомянутое уведомление пользователя может быть, по меньшей мере, визуальным, звуковым, текстовым или их комбинацией.
40. Способ по п. 21, дополнительно выполненный с возможностью записи и хранения архива данных, полученных, по меньшей мере, от одного устройства захвата данных в памяти, причем компьютерная система дополнительно сконфигурирована для обнаружения тревожных траекторий по архивным данным.
41. Считываемый компьютером носитель данных, содержащий исполняемые процессором компьютера инструкции для осуществления способов по любому из пп. 21-40.
| СПОСОБ КОНСЕРВИРОВАНИЯ КОМПОТА ИЗ АЙВЫ И ГРУШ | 2013 |
|
RU2545535C2 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 7088846 B2, 08.08.2006 | |||
| US 8165348 B2, 24.04.2012 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 9197861 B2, 24.11.2015 | |||
| СИСТЕМА КОНТРОЛЯ ПРОХОДА И ПЕРЕМЕЩЕНИЯ В ТОННЕЛЕ | 2015 |
|
RU2606554C2 |

