Область техники
Изобретение относится к видеонаблюдению в составе систем контроля безопасности дорожного движения, а конкретно к технологиям, направленным на автоматическое определение в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств (ТС).
Уровень техники
Известно, что при проектировании геометрических параметров автомобильной дороги предлагается использование показателя рассеивание траектории движения. Для получения характеристики рассеивания траекторий движения автомобилей используется визуализация проектируемой дороги и проверка поведения водителя в исследованиях на специально создаваемых симуляторах вождения (тренажерах). Показатель рассеивания траектории движения автомобиля на криволинейном участке определяется по формуле:

где tv(s) - отклонение траектории движения автомобиля относительно средней траектории движения на криволинейном участке; ta - средняя траектория движения водителя на криволинейном участке; L - длина кривой, м., и характеризует, в том числе, безопасность дорожной инфраструктуры, зависящую от внешних причин: дефектов окружающего ландшафта (вводящих в заблуждение), сложности дорожного участка (поворот, крутой уклон), ограничения видимости и т.д. (Николаева Р.В. Предложения по проектированию автомобильных дорог с учетом восприятия водителем дорожных условий// «Известия» КГАСУ, 2016, № 2 (36), стр. 252). Недостатки этого способа получения рассеивания траекторий транспортных автомобилей: в его назначении, как способа проверки проектных решений при условии допустимого состояния дорожных покрытий, хотя рассеивание может также описывать недопустимое состояние дорожных покрытий; в способе получения отклонения от расчетной траектории движения проверкой поведения некоторых водителей на тренажерах, что не характеризует рассеивание существующего транспортного потока; в определении рассеивания траекторий для одной точки автомобиля, хотя интерес также может представлять взаимные различия рассеивания траекторий некоторых характерных точек автомобиля для оценки поперечных колебаний кузова и «рыскания» автомобиля по курсу; а также в том, что кроме рассеивания траекторий движения для практического применения могут быть удобны иные статистические характеристики рассеивания траекторий характерных точек транспортных средств.
Известно, что в качестве признака наличия колейности и дефектов дорожного покрытия может быть использовано измеренное по горизонтальной координате смещение государственного регистрационного знака автомобиля относительно середины полосы движения на последовательности кадров съёмки стационарно установленной видеокамеры с разделением на тип легковых и тип грузовиков и автобусов с последующим определением среднеквадратичного отклонения смещения при прохождении неповрежденных и повреждённых участков полосы дорожного движения с определением примерных интервалов среднеквадратичного отклонения для каждого типа для выявления характера повреждения дорожного покрытия. (Возможности использования стандартного видеоряда транспортного потока для анализа соответствия состояния дорожного покрытия требованиям безопасности дорожного движения/ Р. Р. Янборисов, В. А. Авдоши, С. В. Ганзин, Р. Р. Санжапов//, «Энерго- и ресурсосбережение: промышленность и транспорт», Волгоградский государственный технический университет, 2019, № 1 (26), стр. 65) Недостатки такого способа определения отклонений траектории, заключается: в том, что: не указана необходимость калибровки поля видеонаблюдения; рассматривается всего два типа автомобилей; не учитывается, что транспортные средства реагируют на прохождение области с дефектом или помехой на дороге не только отклонением траекторий, но и другими способами, например срабатыванием подвески транспортного средства, например, изменением скорости, например, наклоном и раскачиванием транспортного средства; что определяется только среднеквадратичное отклонение смещения траекторий автомобилей от центра полосы движения по горизонтали, хотя интерес могут представлять также иные статистические характеристики рассеивания траекторий характерных точек транспортных средств в трехмерных координатах, характеризующие безопасность дорожного движения.
Известна система и способ обнаружения тревожных траекторий движения объектов на местности, например, для охраны территорий (Патент RU 2671994 C1, G06T 7/20 опубл. 08.11.2018). Этот способ обеспечивает обнаружение тревожных траекторий движения объектов за счет задания графических примитивов и проверки на предмет тревожности каждой траектории движения объектов по правилам, связанным с заданными графическими примитивами. Такой результат достигается за счет способа, содержащего этапы, на которых: осуществляют сбор и предоставление потока данных, включающего метаданные объектов, причем метаданные включают в себя, по меньшей мере, набор положений объектов в определенные моменты времени; задают, по меньшей мере, один графический примитив посредством выбора нескольких точек в системе координат исходных данных, связанных с потоком данных, поступающим от устройства захвата данных, причем набор заданных графических примитивов образует между собой область отслеживания; задают правила классификации для определения того, какие траектории движения объектов являются тревожными по отношению к области отслеживания; осуществляют проверку каждой траектории движения по заданным правилам классификации для выявления тревожных траекторий движения объектов и осуществляют отправку уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного интервала времени. Заявлены, в том числе, варианты: исходные данные могут быть картой или изображением; их координаты могут быть двухмерными или трехмерными; поток данных может быть потоком метаданных или видеопотоком; графический примитив может являться виртуальной двухмерной или трехмерной поверхностью; область отслеживания является коридором, ограниченным заданными графическими примитивами.
Правила классификации могут включать, в том числе: прохождения определенных коридоров в разных сочетаниях; тип и параметры объектов; направление движения; максимальную и минимальную скорость движения; остановку объекта; исчезновение объекта; тип объекта - человек, группа людей, транспортное средство; наличие зонта, головного убора, усов, бороды. Список устройств захвата данных ограничен: видеокамерой; GPS-датчиком; ГЛОНАСС-датчиком: детектором объектов; браслетом охранной системы предоставляющим GPS или ГЛОНАСС координаты и идентификатор владельца браслета.
Недостатками такого способа являются: использование графических примитивов в качестве классификатора для траекторий движения, что может вызвать необходимость изменения примитивов в случае изменений, например, схемы организации дорожного движения; реагирование исключительно на единичные проявления заданных правилами тревожных траекторий, в то время как изменение характеристик рассеивания траекторий, характеризующие изменение условий дорожного движения, определяется при обработке множества траекторий, которые не могут быть идентифицированы, как тревожные; отсутствие классификации типов транспортных средств; отсутствие определения статистических характеристик рассеивания траекторий частей транспортных средств.
Известны система и способ определения нарушений правил дорожного движения на нерегулируемом пешеходном переходе: с уменьшенной стоимостью за счет использования только одной видеокамеры в качестве средства фиксации нарушения; с увеличенной функциональностью за счет определения всех нарушений правил дорожного движения на нерегулируемом пешеходном переходе; а также за счет более эффективных методов определения нарушений путем сравнения траекторий движения транспортного средства и пешехода, получаемых при синергетическом анализе видеоизображения; с распознаванием государственного регистрационного знака по меньшей мере одного транспортного средства, находящегося в зоне пешеходного перехода и определение его траектории движения; с распознаванием по меньшей мере одного пешехода, находящегося в зоне пешеходного перехода, и определения его траектории движения.
Определения нарушения правил дорожного движения происходит по простым правилам распознавания: «стоянка ТС на пешеходном переходе»; «остановка ТС на пешеходном переходе»; «не пропуск пешехода, переходящего проезжую часть»; «обгон на пешеходном переходе», с возможностью формирования для транспортного средства нарушителя информации о факте нарушения правил дорожного движения, с возможностью передачи информации о факте нарушения правил дорожного движения в удаленный центр обработки информации. (RU 2603455 С1 G08G 1/00 опубл. 27.11.2016) Недостатками такого способа и такой системы являются: использование пешеходов, как единственной помехи движению, вызывающей изменение траектории транспортных средств, в то время как пешеход не является помехой, характеризующей эксплуатационное состояние дорожного покрытия; реагирование исключительно на единичные изменения траекторий автомобилей, характерных для нарушения правил дорожного движения; отсутствие классификации типов транспортных средств; отсутствие определения статистических характеристик рассеивания траекторий характерных точек транспортных средств.
Техническим результатом заявленного изобретения является создание эффективного способа автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств.
Для достижения технического результата способ автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств характеризуется тем, что разделяют транспортные средства на типы; проводят видеосъемку одной или нескольких полос движения транспортных средств на автомобильной дороге; выделяют изображение каждого движущегося автомобиля на последовательности кадров; выделяют хотя бы одну характерную точку на изображении движущегося автомобиля; измеряют, в какой-либо системе координат, смещение характерной точки автомобиля при проезде через поле видеонаблюдения хотя бы по одной координате; определяют, как минимум одну статистическую характеристику смещения траекторий транспортных средств для каждого типа транспортных средств в качестве характеристики безопасности дорожного движения; формулируют правила по определению специальных типов транспортных средств по их управляемости и назначению характерных точек для определения статистических характеристик рассеивания; калибруют поле видеонаблюдения цифровых камер по калибровочному объекту, нанесенному на дорожное покрытие; вносят калибровочные данные в состав параметров реконструкции перспективы поля видеонаблюдения для проведения измерений; проводят видеосъемку одной или нескольких полос движения транспортных средств на автомобильной дороге стандартной камерой, имеющейся в системе контроля безопасности дорожного движения, и сохраняют поток данных в памяти устройства записи данных; копируют данные цифровой видеосъемки в память устройства обработки видеоизображения для того, чтобы избежать переделку в архитектуры системы контроля безопасности дорожного движения; выявляют в записи потока данных видеокамеры периоды с благоприятными условиями видеонаблюдения; выделяют изображения движущихся объектов из поля видеонаблюдения из потока видеоданных за период наблюдения; определяют типы транспортных средств из последовательностей кадров с изображениями движущихся объектов; определяют характерные точки на изображении транспортных средств и их координаты в кадре для ранее определенных типов транспортных средств; определяют трехмерные координаты характерных точек в системе координат, связанных с цифровой камерой, для каждой единицы транспортного средства способом реконструкции перспективы; определяют траектории характерных точек транспортных средств в записи, состоящей из времени начала записи траектории, вида характерной точки, типа транспортного средства, принадлежности характерной точки к конкретной единице транспортного средства, последовательности трехмерных координат в системе отсчёта, связанной с видеокамерой, последовательности координат в кадре; определяют статистические характеристики рассеивания траекторий характерных точек для каждого типа транспортных средств для некоторых заданных сечений поперек проезжей части; выводят статистические характеристики рассеивания траекторий типов характерных точек транспортных средств в трехмерных координатах в виде отчетов по запросу на экран, в файл или на печать для использования в качестве самостоятельного критерия безопасности дорожного движения, состояния дорожного покрытия и элементов обустройства автомобильной дороги.
Сущность изобретения
Изобретение поясняется двумя таблицами и чертежом. В чертеже представлена блок – схема, поясняющая осуществление способа. Блок-схема состоит из следующих блоков: Блок 1. Правила определения типа и характерных точек ТС; Блок 2. Калибровка поля видеонаблюдения; Блок 3. Калибровочные данные; Блок 4. Видеосъемка с записью в память устройства записи; Блок 5. Память устройства обработки изображения; Блок 6. Назначение периодов видеонаблюдения; Блок 7. Выделение движущихся объектов; Блок 8. Определение типов ТС; Блок 9. Определение характерных точек ТС и их координат в кадре; Блок 10. Определение трёхмерных координат характерных Точек ТС; Блок 11. Определение траекторий характерных точек ТС; Блок 12. Определение статистических характеристик рассеивания траекторий характерных точек по типам ТС для некоторых выявленных или назначенных сечений; Блок 13. Формирование отчетов о текущих статистических характеристиках рассеивания траекторий.
В Таблице 1 представлены Группы транспортных средств, подлежащих учету согласно Таблице А.1 Пункта 4.2.4.1 ГОСТ 32965-2014 Приложения А
В Таблице 2 представлены Группы транспортных средств, подлежащих учету согласно Таблице А.2 Пункта 4.2.4.1 ГОСТ 32965-2014 Приложения А
Для определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств, характеризующих допустимое или недопустимое состояние дорожных условий, выполняем согласно блок-схеме действия в следующем порядке.
Для выполнения действий Блока 1 формулируем: правила для определения типа транспортных средств по их управляемости с учетом особенностей реагирования каждого типа транспортных средств на допустимые и недопустимые дорожные условия; правила назначения характерных точек для каждого типа транспортных средств для определения статистических характеристик рассеивания траекторий характерных точек в условиях допустимых и недопустимых дорожных условий. Правила определения типа транспортных средств формулируем: при использовании в качестве типа транспортных средств по их управляемости групп, используемых для определения интенсивности дорожного движения автомобилей.
Правила определения характерных точек транспортных средств для каждого типа транспортных средств формулируем для точек, используемых для определения траектории транспортного средства в целом, например: середину переднего или заднего государственного регистрационного знака; середину крыши легкового автомобиля; середину крыши кабины грузового автомобиля.
Также формулируем правила для точек, характеризующих движение частей транспортного средства, с траекторией, отличимой, от траектории транспортного средства в целом, например: центра изображения колеса транспортного средства, в том числе колпачков полуосей колес; правого или левого конца переднего или заднего бампера транспортного средства; переднего или заднего, правого или левого, верхнего угла кабины транспортного средства; переднего или заднего, правого или левого, верхнего или нижнего углов кузова транспортного средства.
Для выполнения действий Блока 2, и для обеспечения возможности сравнения данных рассевания траекторий характерных точек транспортных средств транспортных средств, полученных с разных видеокамер, калибруем поле видеонаблюдения цифровых камер с целью восстановления координат характерных точек в трехмерной системе отсчета, привязанной к оптическому центру объектива видеокамеры: на работающей системе видеонаблюдения; до начала определения трехмерных координат характерных точек в блоке 10; при условии использования калибровочного объекта, нанесённого на поверхность дорожного покрытия; при условии измерения положения оптического центра объектива видеокамеры и калибровочного объекта на дорожном покрытии топографической съемкой; при условии, что разрешающая способность камеры видеонаблюдения в области видеонаблюдения статистических характеристик рассеивания траекторий транспортных средств, будет равна или менее допустимой глубины дефектов дорожного покрытия на ширину проекции одного пикселя видеоизображения на поверхность дорожного покрытия.
Для выполнения действий Блока 3 вносим полученные калибровочные данные в состав параметров реконструкции перспективы поля видеонаблюдения: до начала определения трехмерных координат характерных точек типов транспортных средств по их управляемости; вручную, или с внешнего запоминающего устройства, или передачей данных калибровки по сети; при условии записи данных калибровки в память устройства обработки изображения.
Для выполнения действий Блока 4 проводим или получаем готовую видеосъемку одной или нескольких полос движения транспортных средств на автомобильной дороге камерой видеонаблюдения, находящейся неподвижно в одной точке и не меняющей направление оптической оси во время видеосъемки: при условии, что частота кадров будет не менее 24 кадров в секунду; при условии, что поток данных видеоизображения записывается в память устройства записи данных.
Для выполнения действий Блока 5 копируем данные цифровой видеосъемки в память устройства обработки видеоизображения для обеспечения раздельной работы устройства записи данных и устройства обработки изображения с целью использования потока данных видеосъемки системы контроля безопасности дорожного движения без вмешательства в конструкцию системы видеонаблюдения, имеющего в своем составе стационарную видеокамеру.
Для выполнения действий Блока 6 выделяем из записи потока данных видеокамер назначенные периоды наблюдения, передавая на обработку только те периоды, в которых в наибольшей степени проявляется рассеивание траекторий характерных точек, например: при определенных погодных условиях, при определенной интенсивности движения; при определенном диапазоне скорости транспортного потока, при определенной освещенности.
Для выполнения действий Блока 7 выделяем изображения движущихся объектов из поля видеонаблюдения из потока видеоданных при условии: выделения периодов видеонаблюдения; выделения движущихся объектов путем обработки последовательностей кадров; использования любых алгоритмов, пригодных для выделения движущегося объекта из фона изображения на последовательности кадров с записью выделяемого объекта; выделения каждого отдельного движущегося объекта в случае наличия нескольких движущихся объектов в поле видеонаблюдения; соблюдении режима последующей обработки; выделения движущихся объектов в устройстве обработки видеоизображения; удаления фона в кадре видеоизображения; записи кадров с движущимися объектами в память устройства обработки изображения.
Для выполнения действий Блока 8 определяем типы транспортных средств из последовательностей кадров с изображениями движущихся объектов после выделения движущихся объектов при условии: использования в алгоритмах распознавания правил определения типов транспортных средств по их управляемости; использования применимых способов машинного распознавания типов транспортных средств; автоматического игнорирования объектов, не являющихся транспортными средствами; соблюдения режима последующей обработки; определения типа транспортных средств в устройстве обработки видеоизображения; записи кадров и данных с распознанными движущимися транспортными средствами в память устройства обработки изображения.
Для выполнения действий Блока 9 определяем характерные точки и их координаты в кадре на изображении транспортных средств после определения типов транспортных средств при условии: устойчивой различимости характерной точки на видео изображении; использования в алгоритмах распознавания правил для определения характерных точек типов транспортных средств; определения характерных точек в режиме последующей обработки в устройстве обработки видеоизображения.
Для выполнения действий Блока 10 определяем трехмерные координаты характерных точек каждого изображения движущихся транспортных средств после определения их характерных точек и после получения калибровочных данных из Блока 3 после определения координат на кадре видеоизображения в Блоке 9 при условии: последующего определения координат каждой характерной точки в трехмерной системе координат, привязанной к цифровой камере видеонаблюдения; определения координат характерных точек в режиме последующей обработки в устройстве обработки видеоизображения.
Для выполнения действий Блока 11 определяем в поле видеонаблюдения траектории характерных точек транспортных средств после определения трехмерных координат каждой характерной точки при условии: определения траекторий характерных точек транспортных средств в режиме последующей обработки в устройстве обработки видеоизображения; записи данных траекторий характерных точек типов транспортных средств в трехмерных координатах в память устройства обработки изображения.
Для выполнения действий Блока 12 автоматически определяем в поле видеонаблюдения статистические характеристики рассеивания траекторий характерных точек транспортных средств для каждого типа транспортных средств после определения траекторий характерных точек транспортных средств для некоторых заданных сечений при условии: что могут быть использованы любые статистические характеристики и любые сочетания статистических характеристик, применимые к траектории характерных точек; что статистические характеристики рассеивания траекторий характерных точек определяем в системах трехмерных координат, привязанных к цифровой камере видеонаблюдения; что определение статистических характеристик рассеивания траекторий характерных точек происходит в режиме последующей обработки в устройстве обработки видеоизображения; при условии записи определенных статистических характеристик рассеивания траекторий характерных точек в память устройства обработки изображения.
Для выполнения действий Блока 13 выводим автоматически определённые в поле видеонаблюдения статистические характеристики рассеивания траекторий характерных точек транспортных средств за текущий период наблюдения через человеко-машинный интерфейс устройства обработки видеоизображения в виде отчета по запросу на экран, в файл или на печать для использования в качестве самостоятельного критерия безопасности дорожного движения, состояния дорожного покрытия и элементов обустройства автомобильной дороги.
Пример реализации способа
В рассматриваемом примере реализации при осуществлении действий согласно блок-схеме, показанной на чертеже начинаем с видеосъемки с записью в память устройства записи данных, указанной на схеме как Блок 4.
Используем съемку существующей камеры видеонаблюдения контроля безопасности дорожного движения со следующими параметрами: размер пикселя — 7Х7 мкм; активных пикселей по ширине матрицы — 1920; активных пикселей по высоте матрицы — 1080; фокусное расстояние объектива — 16 мм.
Камера установлена на прямолинейном участке автомобильной дороги над линией разметки края проезжей части. Допустимый размер проекции пикселя на дорожное покрытие устанавливаем, исходя из допустимой глубины дефекта дорожного покрытия, указанного в действующих нормативных документах, например, в таблице 5.3 ГОСТ Р 50597-2017 «Дороги автомобильные и улицы. Требования к эксплуатационному состоянию, допустимому по условиям обеспечения безопасности дорожного движения. Методы контроля», таким образом, чтобы на видеозаписи было различимо вертикальное перемещение части транспортного средства, при прохождении колеса по дефекту недопустимого размера, требующему срочное исправление, в этом случае допустимый размер проекции пикселя на дорожное покрытие, не более, — 50 мм.
Центр системы координат устанавливаем в оптическом центре объектива, вертикальная ось направлена в надир: высота установки в системе координат центра объектива — 12 м; высота габарита приближения транспортных средств в системе координат объектива — 8 м.
Для заданных параметров используем оптимальное положение камеры с максимально возможным полем зрения на поверхности дорожного покрытия: расстояние, на котором обеспечивается допустимый размер проекции пикселя на дорожное покрытие — 117,2 м; расстояние видимости дорожного покрытия вблизи видеокамеры — 20,3 м; размер проекции пикселя на поверхность дорожного покрытия вблизи видеокамеры — 10 мм; длина наблюдаемого отрезка проезжей части — 104,5 м; ширина наблюдаемого отрезка проезжей части — 25,6 м, что соответствует 6 полосам движения с обочинами; площадь участка проезжей части для наблюдения характеристик рассеивания траекторий транспортных средств — 2675 квадратных метров. Поток видеоданных существующей видеокамеры записывается внутри системы видеонаблюдения в память устройства записи данных.
В рассматриваемом примере реализации наличие данных видеосъемки позволяет перейти к осуществлению Блока 1 и определить тип и характерные точки транспортных средств. Определение типа транспортного средства осуществляется установленным и настроенным для использования с видеопотоком видеокамеры, используемой в Блоке 4 , программным продуктом, из имеющихся на рынке, предназначенным для отнесения каждого зафиксированного транспортного средства к группе транспортных средств, подлежащих учету для определения интенсивности дорожного движения, например по признаку габарита транспортного средства, отвечающим требованию Таблиц 1 и 2 ГОСТ 32965-2014 «Межгосударственный стандарт. Дороги автомобильные общего пользования. Методы учета интенсивности движения транспортного потока», содержащих следующие группы транспортных средств: Определение характерных точек для типа транспортного средства осуществляем на основе перечня характерных точек для каждого типа транспортного средства; например, для группы 2 «Легковые автомобили» Таблицы 2 используем характерные точки: центры государственных регистрационных знаков, центр крыши, центры колес; например, для группы 2 Таблицы 1 «Двухосные грузовые автомобили» используем характерные точки: центры государственных регистрационных знаков, центры колес, передние и задние углы тента кузова; например, для группы 13 Таблицы 1 «Автобусы» используем характерные точки: центры государственных регистрационных знаков, центры колес, центр крыши кузова автобуса, передние и задние углы кузова автобуса; аналогично определяем характерные точки для других типов транспортных средств. Для каждой характерной точки каждого типа транспортных средств указываем, для корректного определения траектории точки в трехмерных координатах видеокамеры, усредненную высоту, полученную путем статистической обработки достаточного количества данных.
В рассматриваемом примере для реализации Блока 2 калибруем поле видеонаблюдения цифровых камер сразу после начала эксплуатации камер и далее регулярно, в том числе в ходе технического обслуживания и ремонта. Для этого используем имеющееся на рынке программное обеспечение для калибровки с использованием способа реконструкции перспективы. Для создания калибровочного объекта наносим легко смываемой побелкой, на поверхность дорожного покрытия в поле видеоизображения, поперечную разметку с регулярным шагом в от двух до четырех метров. В качестве продольной разметки используем дорожную разметку полос движения. Места пересечения дорожной разметки и поперечных полос фиксируем в кадре видеоизображения и измеряем их геодезические координаты с использованием спутниковой топографической съемки с погрешностью, меньшей, чем разрешающая способность по ближнему краю видеоизображения, в нашем случае с погрешностью не более 10 мм. Расположение оптического центра объектива видеокамеры также определяем спутниковой топографической съемкой. Калибровочные данные записываем на носитель.
В рассматриваемом примере для реализации Блока 3 вносим полученные калибровочные данные в память устройства обработки видеоизображения с внешнего запоминающего устройства в состав параметров реконструкции перспективы поля видеонаблюдения для проведения измерений до начала обработки видеоизображения - выделения движущихся объектов Блока 7, несмотря на то, что их использование предусмотрено при определении трехмерных координат характерных точек в Блоке 10.
В рассматриваемом примере для реализации Блока 4 реализуем накопление видео потока шести полос движения транспортных средств на автомобильной дороге, записанного стандартной камерой, имеющейся в системе контроля безопасности дорожного движения с упомянутыми выше характеристиками. Для этой камеры: устанавливаем частоту кадров 30 кадров в секунду, это позволит установить шаг сечений для определения рассеивания транспортных средств с шагом 1 метр при средней скорости потока 108 км/час; проводим калибровку согласно Блок 2 до передачи видео потока на обработку, не позднее последнего дня видеосъемки.
В рассматриваемом примере для реализации Блока 5 копируем данные цифровой видеосъемки в память устройства обработки видеоизображения. Для определения характеристик рассеивания накапливаем и используем существующий видео поток для обработки, например, за одну неделю видео наблюдений, в нашем примере ожидаемый суммарный поток дорожного движения составит от 300000 до миллиона автомобилей.
В рассматриваемом примере для реализации Блока 6 храним поток данных видеокамер за назначенный период наблюдения. Для оценки влияния состояния дорожного покрытия на статистические характеристики рассеивания транспортных средств обработка недельного видео потока на каждой камере достаточно проводить один раз в квартал. Отбираем части видео потока общей длительностью около 168 часов в условиях дневного освящения, при интенсивности движения менее 500 транспортных средств в час на полосу движения, что обеспечивает скорость движения выше 54 км/час, в сухую погоду. Арендуемые мощности центра обработки данных, выполняющие функции центра обработки изображения, могут быть менее производительными, чем требуется для обработки данных в условиях реального времени.
В рассматриваемом примере для реализации Блока 7 выделяем изображения движущихся объектов из поля видеонаблюдения из потока видеоданных за период наблюдения. Выделение изображений движущихся объектов осуществляется с использованием программных продуктов, представленных на рынках. Обработка производится на арендуемых мощностях центра обработки данных. Таким образом, весь набор алгоритмов рассматриваемого способа может работать на мощностях системы видеонаблюдения и арендованных мощностях центра обработки данных.
В рассматриваемом примере для реализации Блока 8 определяем типы транспортных средств из последовательностей кадров с изображениями движущихся объектов. Определение типов транспортных средств по правилам, сформулированным в Блоке 1 производим с помощью, например, видеодетектора «Инфопро» производства ООО «Инфопроцесс», предназначенного для отнесения каждого зафиксированного транспортного средства к группе транспортных средств, подлежащих учету для определения интенсивности дорожного движения по признаку габарита транспортного средства согласно Таблице 2 .
В рассматриваемом примере для реализации Блока 9 определяем характерные точки на изображении транспортных средств и их координаты в кадре для ранее определенных типов транспортных средств. Характерные точки определяем с использованием нейросетевого продукта, например, серверного модуля МС127.05 производства АО НТЦ "Модуль" в составе устройства обработки изображения, тренированного для распознавания характерных точек в похожем ракурсе: для легковых автомобилей на месячной видеозаписи; для других транспортных средств не менее чем на годовой видеозаписи. Записываем в память устройства обработки изображения для каждой характерной точки: время съемки; координаты в кадре; вид точки; тип транспортного средства; принадлежность к конкретной единице транспортного средства.
В рассматриваемом примере для реализации Блока 10 определяем трехмерные координаты характерных точек в системе координат, с началом координат в оптическом центре объектива видеокамеры, для каждой единицы транспортного средства: с использованием усредненной высоты характерной точки из правил определения характерной точки для определения координаты по вертикали в системе координат видеокамеры. Записываем в память устройства обработки изображения для каждой характерной точки: время съемки; трехмерные координаты в системе отсчёта, связанной с видеокамерой; координаты в кадре; вид точки; тип транспортного средства; принадлежность точки к конкретной единице транспортного средства.
В рассматриваемом примере для реализации Блока 11 автоматически определяем в поле видеонаблюдения траектории характерных точек транспортных средств с началом трехмерных координат в оптическом центре объектива видеокамеры, для каждой характерной точки каждой единицы транспортного средства. Записываем в память устройства обработки изображения для каждой характерной точки: время начала записи траектории; вид точки; типа транспортного средства; принадлежность характерной к конкретной единице транспортного средства; последовательность трехмерных координат в системе отсчёта, связанной с видеокамерой; последовательность координат в кадре.
В рассматриваемом примере для реализации Блока 12 автоматически определяем в поле видеонаблюдения статистические характеристики рассеивания траекторий характерных точек транспортных средств: в системе трехмерных координат, с началом координат в оптическом центре объектива видеокамеры; в рассматриваемом примере для сечений поперек оси проезжей части с шагом в 1 метр, характеризующим перемещение транспортного средства за один кадр видеосъемки при скорости 108 км/час; с построением непрерывного вариационного ряда координат пересечения траекторий характерных точек транспортных средств одного типа с этими сечениями и значений скоростей при пересечении с этими сечениями; с использованием средств аппроксимации для уменьшения ошибок, связанной с большим шагом определения положения пересечения траекторий одинаковых характерных точек транспортных средств одного типа с этими сечениями; с использованием для определения статистических характеристик рассеивания пересечения траекторий характерных точек транспортных средств с сечениями, перпендикулярными оси проезжей части. В качестве статистических характеристик используем, например: рассеивание траекторий автомобилей для часто встречающихся типов транспортный средств; среднеквадратичное отклонение скорости и координат для часто встречающихся типов транспортных средств; коэффициенты вариации скоростных, горизонтальных и вертикальных отклонений; доверительный интервал скоростных, горизонтальных и вертикальных отклонений для редко встречающихся типов транспортных средств; средние статистические величины рассеивания траекторий, для рекомендаций водителям и для управления беспилотными транспортными средствами; также иные статистические характеристики.
В рассматриваемом примере для реализации Блока 13 выводим статистические характеристики в трехмерных координатах в виде отчетов по запросу на экран, в файл или на печать.
Предложенное техническое решение позволяет создать эффективный способ автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств в трехмерных координатах для использования в качестве самостоятельного критерия безопасности дорожного движения, состояния дорожного покрытия и элементов обустройства автомобильной дороги.
Способ автоматического определения в поле видеонаблюдения
статистических характеристик рассеивания
траекторий характерных точек транспортных средств
Таблица 1.
Способ автоматического определения в поле видеонаблюдения
статистических характеристик рассеивания
траекторий характерных точек транспортных средств
Таблица 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОТОБРАЖЕНИЯ ДАННЫХ С ВИДЕОКАМЕРЫ | 2018 |
|
RU2679200C1 |
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2597328C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2592712C1 |
| СПОСОБ ТЕЛЕМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ И ФИКСАЦИИ СКОРОСТИ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2486598C1 |
| Система фиксации нарушения правил парковки | 2020 |
|
RU2743455C1 |
| СПОСОБ РЕГИСТРАЦИИ ДИНАМИКИ ДВИЖЕНИЯ ОБЪЕКТА | 2014 |
|
RU2551765C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| СПОСОБ ОХРАННОЙ СИГНАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ ВИДЕОНАБЛЮДЕНИЯ | 2004 |
|
RU2260209C1 |

Изобретение относится к видеонаблюдению. Способ автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характеризуется тем, что разделяют транспортные средства на типы, проводят видеосъемку одной или нескольких полос движения транспортных средств, выделяют изображение каждого движущегося автомобиля, выделяют хотя бы одну характерную точку на изображении движущегося автомобиля, измеряют смещение характерной точки автомобиля при проезде через поле видеонаблюдения, определяют одну статистическую характеристику смещения траекторий транспортных средств для каждого типа транспортных средств. При этом формулируют правила по определению специальных типов транспортных средств, калибруют поле видеонаблюдения цифровых камер, вносят калибровочные данные в состав параметров реконструкции перспективы поля видеонаблюдения, проводят видеосъемку одной или нескольких полос движения транспортных средств на автомобильной дороге стандартной камерой, имеющейся в системе контроля безопасности дорожного движения, и сохраняют поток данных в памяти устройства записи данных, копируют данные цифровой видеосъемки в память устройства и выявляют в записи потока данных видеокамеры периоды. Достигается повышение эффективности автоматического определения статистических характеристик рассеивания траекторий. 1 ил., 2 табл.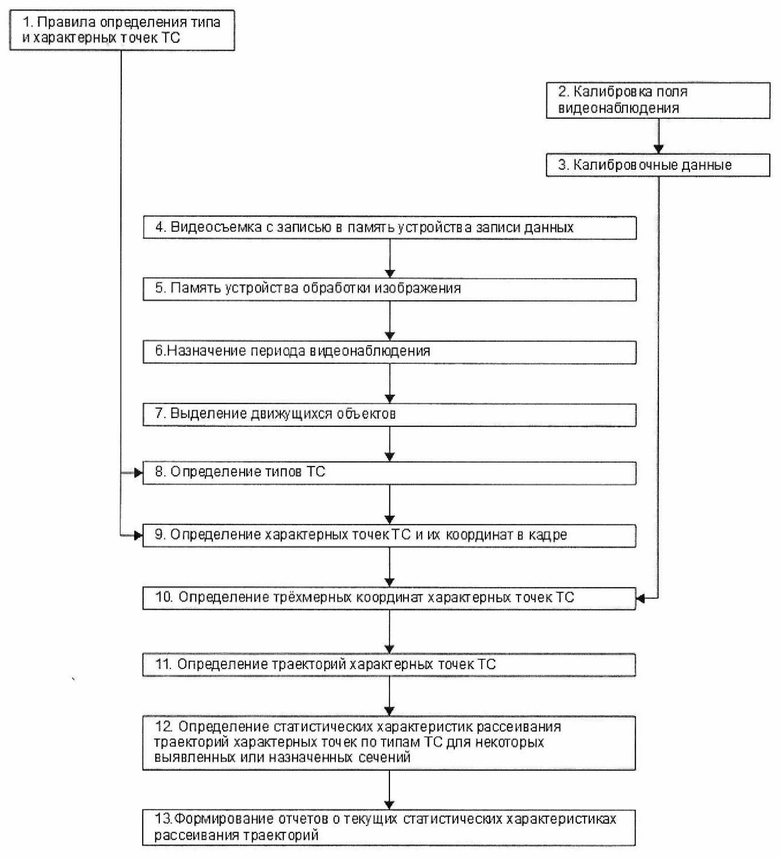
Способ автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств, характеризующийся тем, что разделяют транспортные средства на типы; проводят видеосъемку одной или нескольких полос движения транспортных средств на автомобильной дороге; выделяют изображение каждого движущегося автомобиля на последовательности кадров; выделяют хотя бы одну характерную точку на изображении движущегося автомобиля; измеряют, в какой-либо системе координат, смещение характерной точки автомобиля при проезде через поле видеонаблюдения хотя бы по одной координате; определяют как минимум одну статистическую характеристику смещения траекторий транспортных средств для каждого типа транспортных средств в качестве характеристики безопасности дорожного движения; формулируют правила по определению специальных типов транспортных средств по их управляемости и назначению характерных точек для определения статистических характеристик рассеивания; калибруют поле видеонаблюдения цифровых камер по калибровочному объекту, нанесенному на дорожное покрытие; вносят калибровочные данные в состав параметров реконструкции перспективы поля видеонаблюдения для проведения измерений; проводят видеосъемку одной или нескольких полос движения транспортных средств на автомобильной дороге стандартной камерой, имеющейся в системе контроля безопасности дорожного движения, и сохраняют поток данных в памяти устройства записи данных; копируют данные цифровой видеосъемки в память устройства обработки видеоизображения для того, чтобы избежать переделку в архитектуре системы контроля безопасности дорожного движения; выявляют в записи потока данных видеокамеры периоды с благоприятными условиями видеонаблюдения; выделяют изображения движущихся объектов из поля видеонаблюдения из потока видеоданных за период наблюдения; определяют типы транспортных средств из последовательностей кадров с изображениями движущихся объектов; определяют характерные точки на изображении транспортных средств и их координаты в кадре для ранее определенных типов транспортных средств; определяют трехмерные координаты характерных точек в системе координат, связанных с цифровой камерой, для каждой единицы транспортного средства способом реконструкции перспективы; определяют траектории характерных точек транспортных средств в записи, состоящей из времени начала записи траектории, вида характерной точки, типа транспортного средства, принадлежности характерной точки к конкретной единице транспортного средства, последовательности трехмерных координат в системе отсчёта, связанной с видеокамерой, последовательности координат в кадре; определяют статистические характеристики рассеивания траекторий характерных точек для каждого типа транспортных средств для некоторых заданных сечений поперек проезжей части; выводят статистические характеристики рассеивания траекторий типов характерных точек транспортных средств в трехмерных координатах в виде отчетов по запросу на экран, в файл или на печать для использования в качестве самостоятельного критерия безопасности дорожного движения, состояния дорожного покрытия и элементов обустройства автомобильной дороги.
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ТРЕВОЖНЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ОБЪЕКТОВ | 2018 |
|
RU2671994C1 |
| СИСТЕМЫ И СПОСОБЫ ОБНАРУЖЕНИЯ ТРЕВОЖНЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ОБЪЕКТОВ | 2017 |
|
RU2688739C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕВИАНТНОГО ПОВЕДЕНИЯ ЧЕЛОВЕКА В РЕЖИМЕ ОДНОВРЕМЕННОЙ РАБОТЫ ГРУППЫ ВИДЕОКАМЕР | 2019 |
|
RU2694139C1 |

