Область техники
Изобретение относится к области видеонаблюдения, а именно к технологиям, направленным на обнаружение тревожных траекторий движения объектов.
Предположим, что есть карта и траектории объектов на ней, например, от GPS датчиков автомобилей и оператор получает событие, тревогу, если какой-то автомобиль поехал по запрещенному маршруту, либо въехал в запрещенную область.
Под событием также понимается наличие тех или иных объектов, неподвижных или движущихся, их расположение, траекториях их движения и многие другие признаки. Объектом может быть человек, животное, транспортное средство, например, машина, и любые предметы, передвигающиеся в поле зрения видеокамеры.
Также оператора могут интересовать тревожные события, и, в частности, траектории движения объектов, которые по каким-либо критериям стали более интересны, чем остальные. К примеру, траектория движения некоторого объекта, в течение заданного времени, изменила свое направление и стала тревожной. В примере с автомобилями, могут быть интересны траектории, которые долго находятся на территории предприятия, иногда это может говорить о потенциальном воровстве.
Изобретение может найти применение в различных системах видеонаблюдения, видеоаналитики, например, в охранных системах, системах видеонаблюдения за работой оборудования, аналитических системах для маркетинговых исследований, в ситуационных центрах, системах автоматизации производства и во многих других областях.
Уровень техники
Для оптимизации процесса обнаружения тревожных траекторий движения объектов, существуют различные технологии, например, задание некоторых правил классификации траекторий движения объектов, на предмет отнесения последних к тревожным.
В уровне техники раскрыты технологии отслеживания объекта, такого, например, как транспортное средство, в которых анализируют видеоданные, полученные с камеры (см. заявку US 2011/0170744 A1, G06K 9/00, опубл. 14.07.2011). Недостатком данных технологий является невозможность обнаружения тревожных траекторий движения объектов.
В уровне техники раскрыты технологии классификации траекторий движения объектов для различных целей, например, для предотвращения столкновений (см. заявку US 2011/0255747 A1, G06K 9/00, опубл. 20.10.2011). Недостатками данных технологий является невозможность задания правил для определения тревожных траекторий движения объектов.
Наиболее близким аналогом для заявленного изобретения, является технология видеонаблюдения, в которой в качестве одного из правил обнаружения тревожных траекторий движения, используется определение пересечения объекта и «растяжки» (см. заявку WO 2005/050971 А2, H04N, опубл. 02.06.2005). Данная технология хоть и позволяет задать некоторые правила обнаружения тревожных траекторий движения объектов, однако не позволяет осуществить классификацию траекторий по заданным правилам, а также не предназначена для оповещения пользователя о наличии тревожной траектории движения объекта.
Задачей заявленного изобретения является устранение, по меньшей мере, одного из недостатков предшествующего уровня техники.
Раскрытие изобретения
Техническим результатом заявленной группы изобретений является расширение арсенала технических средств, в части обнаружения тревожных траекторий движения объектов, за счет проверки на предмет тревожности каждой траектории движения объектов по заданным правилам обнаружения тревожных траекторий.
Данный технический результат достигается за счет предложенной, реализованной посредством компьютера системы обнаружения тревожных траекторий движения объектов, содержащей: сенсорное устройство, выполненное с возможностью предоставления метаданных объектов, при этом метаданные представляют собой набор координат объектов и их положений в определенные моменты времени; и компьютерную систему, включающую память, по меньшей мере, один процессор и пользовательский интерфейс для выполнения классификации, сбора и обработки метаданных объектов, предоставленных сенсорным устройством, пользовательский интерфейс, содержащий средства ввода и вывода данных, где упомянутые средства ввода содержат блок задания правил, посредством которого компьютерная система задает правила определения того, какие траектории движения объектов являются тревожными, блок классификации траекторий движения объектов, выполненный с возможностью проверки каждой траектории движения по заданным в блоке задания правил, правилам, с целью обнаружения тревожных траекторий движения объектов, блок классификации траекторий движения объектов также выполненный с возможностью отправки уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного времени.
Данный технический результат также достигается за счет компьютерно-реализованного устройства обнаружения тревожных траекторий движения объектов, содержащего: сенсорное устройство, выполненное с возможностью предоставления метаданных объектов, при этом метаданные представляют собой набор координат объектов и их положений в определенные моменты времени; и упомянутое устройство обнаружения тревожных траекторий движений объектов содержит графический пользовательский интерфейс, указанное устройство адаптируется для выполнения классификации, сбора и обработки метаданных объектов, предоставленных сенсорным устройством, пользовательский интерфейс, содержащий средства ввода и вывода данных, где упомянутые средства ввода содержат блок задания правил, выполненный с возможностью задания правил определения того, какие траектории движения объектов являются тревожными, блок классификации траекторий движения объектов, выполненный с возможностью проверки каждой траектории движения по заданным в блоке задания правил, правилам, с целью обнаружения тревожных траекторий движения объектов, блок классификации траекторий движения объектов также выполненный с возможностью отправки уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного времени.
Данный технический результат также достигается за счет способа для реализации системы обнаружения тревожных траекторий движения объектов, содержащий этапы, на которых: предоставляют метаданные объектов посредством сенсорного устройства, при этом метаданные представляют собой набор координат объектов и их положений в определенные моменты времени; выполняют классификацию, сбор и обработку метаданных объектов, предоставленных сенсорным устройством, посредством компьютерной системы, включающей память, по меньшей мере, один процессор и пользовательский интерфейс; задают правила определения того, какие траектории движения объектов являются тревожными, посредством блока задания правил пользовательского интерфейса, осуществляют проверку каждой траектории движения по заданным в блоке задания правил, правилам, посредством блока классификации траекторий движения объектов, с целью обнаружения тревожных траекторий движения объектов, осуществляют отправку уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного времени, посредством блока классификации траекторий движения объектов.
В одном частном варианте заявленного решения, предоставление метаданных объектов, выполнение классификации, сбор и обработка метаданных объектов, также осуществляются посредством видеокамеры и/или посредством компьютерной системы и/или эти этапы могут быть разделены между видеокамерой и компьютерной системой.
В другом частном варианте заявленного решения, в качестве правил определения того, какие траектории движения объектов являются тревожными, определены следующие:
- факт наличия пересечения траектории движения объекта и некоторой поверхности в пространстве координат объектов,
- факт попадания траектории, по меньшей мере, одного объекта в некоторую область в пространстве координат объектов,
- факт покидания траектории, по меньшей мере, одного объекта некоторой области в пространстве координат объектов,
- факт появления траектории, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт исчезновения траектории, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт начала движения, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт остановки, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- определение временной длительности нахождения траектории движения, по меньшей мере, одного объекта внутри некоторой области в пространстве координат объектов,
- факт одновременного нахождения внутри некоторой области нескольких объектов.
Еще в одном частном варианте, упомянутый графический интерфейс адаптирован для отображения координат объектов, по меньшей мере, на изображении, снимке, карте местности, полученных из упомянутого сенсорного устройства.
В частном варианте заявленного решения, упомянутая поверхность, которая пересекает траекторию движения объекта, является виртуальной и является, по меньшей мере, одним из следующего: изогнутая поверхность, мульти-сегментная поверхность или несколько параллельных поверхностей.
Еще в одном частном варианте, если координаты объекта представлены в виде двумерных координат, то упомянутая поверхность будет изогнутой линией, мульти-сегментной линией, несколькими параллельными линиями.
В другом частном варианте, при задании правил, характеризующих, по меньшей мере:
- факт наличия пересечения траектории движения объекта и некоторой поверхности в пространстве координат объектов,
- факт попадания траектории, по меньшей мере, одного объекта в некоторую область в пространстве координат объектов,
- факт покидания траектории, по меньшей мере, одного объекта некоторой области в пространстве координат объектов,
- факт появления траектории, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт исчезновения траектории, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт начала движения, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт остановки, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- определение временной длительности нахождения траектории движения, по меньшей мере, одного объекта внутри некоторой области в пространстве координат объектов,
- факт одновременного нахождения внутри некоторой области нескольких объектов, блоком задания правил учитываются, по меньшей мере, следующие параметры объекта: направление движения, тип, скорость, размер.
Еще в одном частном варианте, упомянутые правила определения того, какие траектории движения объектов являются тревожными, зависят также от типа сенсорного устройства, которое предоставляет метаданные.
В другом частном варианте, упомянутое сенсорное устройство является детектором объектов, в котором учитывается цвет объекта.
В другом частном варианте, упомянутое сенсорное устройство является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты, при этом данное устройство сообщает идентификатор владельца браслета, а в зависимости от типа этого идентификатора, определяют, оповещать ли о тревоге.
Еще в одном частном варианте, упомянутое сенсорное устройство является устройством на борту транспортного средства с датчиком, предоставляющим GPS или ГЛОНАСС координаты, при этом данное устройство сообщает идентификатор владельца датчика, а в зависимости от типа этого идентификатора, определяют, оповещать ли о тревоге.
Еще в одном частном варианте, в качестве дополнительных характеристик объекта могут быть заданы, по меньшей мере, следующие: пол объекта, наличие у объекта: сумки, зонта, головного убора, усов, бороды.
В другом частном варианте, упомянутое уведомление пользователя может быть, по меньшей мере, визуальным, звуковым, текстовым.
Данный технический результат также достигается за счет считываемого компьютером носителя, содержащего выполняемые посредством процессора компьютера инструкции для осуществления вышеупомянутых способов обнаружения тревожных траекторий движения объектов.
Осуществление изобретения
Ниже будет приведено описание примерных вариантов заявленной группы изобретений. Однако заявленная группа изобретений не ограничивается только этими вариантами осуществления. Специалистам будет очевидно, что под объем заявленной группы изобретений, описанной в формуле, могут попадать и другие варианты.
Группа изобретений характеризует реализованные посредством компьютера систему, устройство, способ для обнаружения тревожных траекторий движения объектов и считываемый компьютером носитель, содержащий команды, побуждающие процессор компьютера осуществлять этапы способов для обнаружения тревожных траекторий движения объектов.
В данном контексте, под реализованными посредством компьютера системами понимаются любые вычислительные системы, построенные на базе программно-аппаратных средств.
Также под компьютерно-реализованными устройствами понимаются любые вычислительные устройства, построенные на базе программно-аппаратных средств. Под такими устройствами могут пониматься любые электронные вычислительные устройства, например, такие как: персональные компьютеры, смартфоны, ноутбуки, планшеты, видеокамеры и т.д.
Заявленные способы также могут быть реализованы посредством любых электронных вычислительных устройств, которые имеют технические возможности для реализации этапов этих способов.
А также, в контексте данного описания, под сенсорными устройствами понимаются любые вычислительные устройства, которые могут предоставлять метаданные некоторых объектов. Под такими устройствами понимаются такие сенсорные устройства, как видеокамеры, различные детекторы объектов, GPS и ГЛОНАСС датчики и многие другие.
Под метаданными объектов понимают набор, представляющий собой, по меньшей мере, координаты объектов и их положения в определенные моменты времени. Моменты времени могут быть заданы в системах видеонаблюдения произвольно, например, программно.
Под системой обнаружения тревожных траекторий движения объектов (система 1) понимается любая система, имеющая, по меньше мере, сенсорное устройство, компьютерную систему, пользовательский интерфейс, блок классификации траекторий движения объектов, а также в такую систему могут входить любые другие известные в данном уровне техники устройства.
Приведем пример работы системы 1.
Работа системы 1 начинается с получения временного ряда положений некоторых объектов посредством сенсорного устройства. Данный временной ряд характеризует набор координат объектов и их положений в определенные моменты времени, данный набор обозначим кратко - метаданные объектов. Метаданные могут быть представлены в виде двумерных или трехмерных координат.
В случае представления координат объекта в двумерном виде, поверхность, которая может пересекать объект, является линией.
В случае представления координат объекта в трехмерном виде, поверхность, которая может пересекать объект, является, по меньшей мере, изогнутой поверхностью, мульти-сегментой поверхностью или несколькими параллельными поверхностями. Указанные поверхности также могут быть виртуальными.
Далее, в системе 1 осуществляются этапы классификации, сбора, обработки полученных метаданных. Эти этапы могут осуществляться как компьютерной системой, входящей в состав системы 1, так и посредством видеокамеры и/или этапы могут быть разделены между компьютерной системой и видеокамерой. Такое разделение может быть произведено оператором при настройке системы.
Оператор имеет возможность управлять системой 1 посредством стандартных средств пользовательского интерфейса. В том числе, посредством блока заданий правил (блок 1) в системе 1 имеется возможность задания правил определения того, какие траектории движения объектов являются тревожными.
Блок 1 задает правила, исходя из следующих фактов: факт наличия пересечения траектории движения объекта и некоторой поверхности в пространстве координат объектов,
- факт попадания траектории, по меньшей мере, одного объекта в некоторую область в пространстве координат объектов,
- факт покидания траектории, по меньшей мере, одного объекта некоторой области в пространстве координат объектов,
- факт появления траектории, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт исчезновения траектории, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт начала движения, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- факт остановки, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов,
- определение временной длительности нахождения траектории движения, по меньшей мере, одного объекта внутри некоторой области в пространстве координат объектов,
- факт одновременного нахождения внутри некоторой области нескольких объектов.
При определении указанных фактов, для объекта учитываются, по меньшей мере, следующие параметры: направление движения, тип объекта, скорость движения объекта, размер объекта, в случае определения того, что объект является человеком, учитываются также: пол, возраст, наличие у объекта определенных отличительных черт, например, связанных с особенностями внешности: усы, борода, головной убор, зонт, сумка и т.д.
Данные факты могут присутствовать в системе 1 в различных комбинациях.
В качестве альтернативного варианта задания правил, в системе 1 есть вариант задания правил, в зависимости от типа сенсорного устройства, которое предоставило метаданные объектов.
К примеру, в случае, если сенсорное устройство является детектором объектов, следует учитывать еще и цвет объектов.
В случае, если сенсорное устройство является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты объекта, данное устройство сообщает системе 1 идентификатор владельца браслета. По данному идентификатору, определяют, оповещать ли о тревоге или нет.
Кроме того, в блоке 1 могут быть заданы иные правила, которые не ограничиваются данными примерами.
Далее, когда правила в системе 1 заданы, приступают к классификации траекторий движения объектов посредством блока классификации траекторий движения объектов (блок 2). Блок 2 проверяет каждую траекторию движения объектов по заданным в блоке 1 правилам.
Функции проверки в блоке 2 могут быть настроены в зависимости от конкретного факта и/или сразу нескольких фактов, которые могут говорить о наличии тревожных признаков у той или иной траектории движения объекта.
Блок 2 также выполнен с возможностью отправки уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного времени. Такие уведомления могут быть, по меньшей мере, визуальными, звуковыми, текстовыми. Пользователь и/или оператор в системе 1 может задать время и приемлемый для него вид оповещения. К примеру, если траектория некоего объекта стала тревожной с течением времени 10 минут, пользователю придет об этом оповещение не менее чем через 5 минут с момента определения факта тревожной траектории. Можно также задать время оповещения равным факту обнаружения тревожной траектории. Оповещение может быть в виде SMS или MMS оператору и/или пользователю системы 1 с указанием конкретных метаданных и/или параметров объекта.
Приведем примеры настройки правил обнаружения тревожных траекторий посредством блока 1.
При настройке правил обнаружения траекторий объектов в блоке 1 могут быть заданы, по меньшей мере, следующие факты: факт наличия пересечения траектории движения объекта и некоторой поверхности в пространстве координат объектов (факт 1),
- факт попадания траектории, по меньшей мере, одного объекта в некоторую область в пространстве координат объектов (факт 2),
- факт покидания траектории, по меньшей мере, одного объекта некоторой области в пространстве координат объектов (факт 3),
- факт появления траектории, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов (факт 4),
- факт исчезновения траектории, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов (факт 5),
- факт начала движения, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов (факт 6),
- факт остановки, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов (факт 7),
- определение временной длительности нахождения траектории движения, по меньшей мере, одного объекта внутри некоторой области в пространстве координат объектов (факт 8),
- факт одновременного нахождения внутри некоторой области нескольких объектов (факт 9).
При этом в системе 1 предусмотрена возможность отслеживания фактов 1-9 по времени, а также присвоение тревожным траекториям степени тревожности: высокая, средняя, низкая, ложная.
К примеру, если для объекта, являющегося человеком обнаружен факт 1, т.е. траектория его движения пересекла поверхность проезжей части, эта ситуация может быть потенциально опасной. Однако, при отслеживании ее в течение, к примеру, 1 минуты, будет видно, что человек успешно перешел проезжую часть, покинул ее и пересек область тротуара. То есть данная траектория перестала быть тревожной по прошествии некоторого времени. Если системой 1 она будет признана как тревожная, это можно расценить как ложное срабатывание.
Приведем еще несколько примеров в таблице 1.
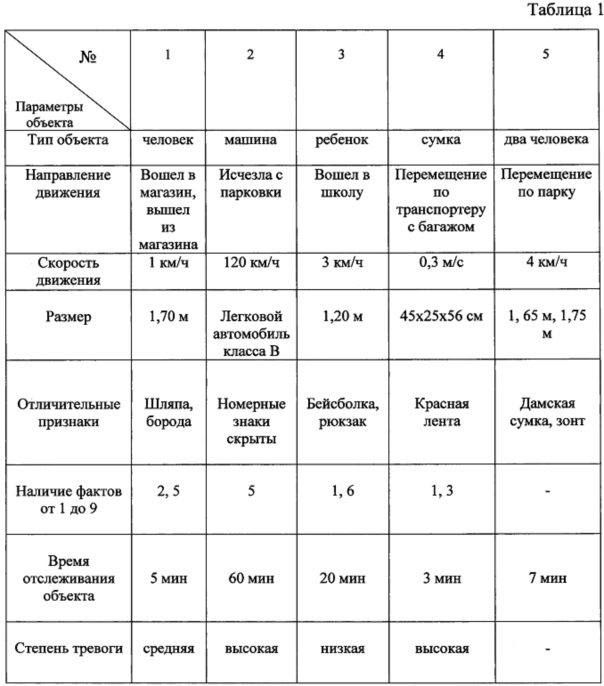

Например, в случае с ребенком (объект 3), вход в школу не является опасным, однако, оповещение о факте входа может приходить пользователю, например, родителю. Этот факт будет полезен в случае дальнейшего отслеживания траектории движения ребенка, и установления, к примеру, факта покидания ребенка здания школы. К примеру, покидание школы раньше времени можно расценить как тревожное событие. Либо изменение траектории движения ребенка и факт пересечения проезжей части в неположенном месте также расценивается как тревожное событие.
В случае ситуации с объектом 5, тревожных событий или траекторий не выявлено, значит и оповещения не нужны. Объекты, т.е. люди в данном случае просто гуляют по парку. При дальнейшем отслеживании, и при возникновении некоторых тревожных фактов, могут быть отправлены соответствующие оповещения о таких фактах.
Приведем пример задания правила определения тревожной траектории блоком 1, связанного с фактом обнаружения пересечения траектории объекта и виртуальной изогнутой поверхности.
К примеру, в системе 1 идет отслеживание траектории движения автомобиля.
Траекторию движения автомобиля по ходу ее изменения могут пересекать множество изогнутых поверхностей, которые следуют по контуру одной или нескольких областей в сцене. Данные поверхности также могут быть мульти-сегментными, т.е. состоящими более чем из одного линейного сегмента. Кроме того, в системе 1 могут быть заданы правила, характеризующие множественные параллельные поверхности. А также, могут быть заданы такие правила, в которых траектория движения объекта пересекала бы все поверхности в определенном порядке или в течение определенного периода времени.
Могут быть возможны и другие варианты, и изобретение не ограничивается этими примерами.
Приведем пример функционирования способа, этапы которого реализуют систему 1.
Этап 1: Предоставление метаданных объектов посредством сенсорного устройства, сенсорное устройство может быть, по меньшей мере, видеокамерой, детектором объектов, датчиком GPS и/или ГЛОНАСС, браслетом охранной сигнализации и т.п.
Этап 2: Выполнение классификации, сбора и обработки метаданных объектов, которые предоставлены сенсорным устройством, посредством компьютерной системы.
Этап 3: Задание правил определения того, какие траектории движения объектов являются тревожными посредством блока 1.
Этап 4: Проверяют каждую траекторию движения по заданным в блоке 1 правилам с целью обнаружения тревожных траекторий. Проверку осуществляют в блоке 2.
Этап 5: Отправляют уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного времени, посредством блока 2.
Варианты осуществления настоящей группы изобретений могут быть реализованы с использованием программного обеспечения, аппаратных средств, программной логики или их комбинации. В примере осуществления программная логика, программное обеспечение или набор инструкций хранятся на одном из различных традиционных машиночитаемых носителей. В контексте данного документа «машиночитаемым носителем» может быть любая среда или средства, которые могут содержать, хранить, передавать, распространять или транспортировать инструкции для их использования системой выполнения инструкций, оборудованием или устройством, таким как компьютер. Машиночитаемый носитель может включать энергонезависимый машиночитаемый носитель данных, который может быть любой средой или средством, содержащим или хранящим инструкции для их использования системой выполнения инструкций, оборудованием или устройством, таким как компьютер, или для использования в связи с ними.
В одном из примеров осуществления может быть предложена схема, или схема пользовательского интерфейса, конфигурированная для обеспечения, по меньшей мере, некоторых функций управления, описанных выше.
Если необходимо, по меньшей мере, часть различных функций, рассмотренных в данном описании, может быть выполнена в отличном от представленного порядке и/или одновременно друг с другом. Кроме того, при необходимости одна или более из описанных выше функций могут быть опциональными или могут комбинироваться.
Хотя в независимых пунктах формулы изобретения охарактеризованы различные аспекты настоящего изобретения, другие аспекты изобретения включают другие комбинации признаков из описанных вариантов осуществления и/или зависимых пунктов формулы изобретения совместно с признаками независимых пунктов формулы изобретения, при этом упомянутые комбинации не обязательно явно указаны в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ТРЕВОЖНЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ОБЪЕКТОВ | 2018 |
|
RU2671994C1 |
| СИСТЕМА И СПОСОБ ПОИСКА ОБЪЕКТОВ ПО ТРАЕКТОРИЯМ ДВИЖЕНИЯ НА ПЛАНЕ МЕСТНОСТИ | 2018 |
|
RU2701985C1 |
| СИСТЕМА И СПОСОБ ОТОБРАЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ НА КАРТЕ МЕСТНОСТИ | 2020 |
|
RU2742582C1 |
| Способ автоматического определения в поле видеонаблюдения статистических характеристик рассеивания траекторий характерных точек транспортных средств | 2022 |
|
RU2779971C1 |
| СИСТЕМА И СПОСОБ СОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2019 |
|
RU2701092C1 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ПО ВИДЕОДАННЫМ | 2021 |
|
RU2775162C1 |
| Устройство и способ управления системой видеонаблюдения в реальном времени в режиме фиксации тревожных событий | 2017 |
|
RU2688735C2 |
| СПОСОБ И СИСТЕМА ДЕТЕКТИРОВАНИЯ ТРЕВОЖНЫХ СОБЫТИЙ, ПРОИСХОДЯЩИХ НА ТРАНСПОРТНОМ СРЕДСТВЕ ВО ВРЕМЯ ПЕРЕВОЗКИ ГРУЗОВ, В РЕЖИМЕ РЕАЛЬНОГО ВРЕМЕНИ | 2020 |
|
RU2748780C1 |
| СПОСОБ И СИСТЕМА ОТОБРАЖЕНИЯ ДАННЫХ С ВИДЕОКАМЕРЫ | 2018 |
|
RU2679200C1 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ ОТЧЕТОВ НА ОСНОВАНИИ АНАЛИЗА МЕСТОПОЛОЖЕНИЯ И ВЗАИМОДЕЙСТВИЯ СОТРУДНИКОВ И ПОСЕТИТЕЛЕЙ | 2020 |
|
RU2756780C1 |
Изaобретение относится к области видеонаблюдения, а именно к технологиям, направленным на обнаружение тревожных траекторий движения объектов. Технический результата заключается в расширении арсенала технических средств в части обнаружения тревожных траекторий движения объектов за счет проверки на предмет тревожности каждой траектории движения объектов по заданным правилам обнаружения тревожных траекторий. Реализованная посредством компьютера система обнаружения тревожных траекторий движения объектов содержит сенсорное устройство, компьютерную систему, пользовательский интерфейс и блок классификации траекторий движения объектов. Раскрыты также компьютерно-реализованное устройство обнаружения тревожных траекторий движения объектов, способ обнаружения тревожных траекторий движения объектов, считываемый компьютером носитель данных. 4 н. и 26 з.п. ф-лы, 1 табл.
1. Реализованная посредством компьютера система обнаружения тревожных траекторий движения объектов, содержащая:
сенсорное устройство, выполненное с возможностью предоставления метаданных объектов, при этом метаданные представляют собой набор положений объектов в определенные моменты времени;
компьютерную систему, включающую память и по меньшей мере один процессор для выполнения классификации, сбора и обработки метаданных объектов, предоставленных сенсорным устройством;
графический пользовательский интерфейс, содержащий средства ввода и вывода данных, где упомянутые средства ввода содержат блок задания правил, посредством которого компьютерная система задает правила определения того, какие траектории движения объектов являются тревожными, при этом упомянутые правила зависят от типа сенсорного устройства, которое предоставляет метаданные объектов; и
блок классификации траекторий движения объектов, выполненный с возможностью проверки каждой траектории движения по правилам, заданным в блоке задания правил, с целью обнаружения тревожных траекторий движения объектов,
при этом упомянутый блок классификации траекторий движения объектов также выполнен с возможностью отправки уведомления пользователю, в случае, если траектория движения оказалась или стала тревожной с течением заданного времени.
2. Система по п. 1, отличающаяся тем, что выполнение классификации, сбора и обработки метаданных объектов также осуществляется посредством видеокамеры или эти этапы разделены оператором системы между видеокамерой и компьютерной системой.
3. Система по п. 1, отличающаяся тем, что в качестве правил определения того, какие траектории движения объектов являются тревожными, определены следующие:
- факт наличия пересечения траектории движения объекта и некоторой поверхности в пространстве координат объектов;
- факт попадания траектории по меньшей мере одного объекта в некоторую область в пространстве координат объектов;
- факт покидания траектории по меньшей мере одного объекта некоторой области в пространстве координат объектов;
- факт появления траектории по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- факт исчезновения траектории по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- факт начала движения по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- факт остановки по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- определение временной длительности нахождения траектории движения по меньшей мере одного объекта внутри некоторой области в пространстве координат объектов;
- факт одновременного нахождения внутри некоторой области нескольких объектов.
4. Система по п. 1, отличающаяся тем, что упомянутый графический пользовательский интерфейс адаптирован для отображения координат положений объектов, полученных от сенсорного устройства, по меньшей мере, на изображении, снимке или карте местности.
5. Система по п. 3, отличающаяся тем, что упомянутая поверхность, которая пересекает траекторию движения объекта, является виртуальной и является по меньшей мере одним из следующего: изогнутой поверхностью, мульти-сегментной поверхностью или несколькими параллельными поверхностями.
6. Система по п. 3, отличающаяся тем, что положения объектов представлены в виде двумерных координат, при этом упомянутая поверхность является линией.
7. Система по п. 3, отличающаяся тем, что при проверке каждой траектории движения по заданным правилам учитываются, по меньшей мере, следующие параметры объекта: направление движения, тип, скорость, размер.
8. Система по п. 7, отличающаяся тем, что когда упомянутое сенсорное устройство является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты, данное устройство сообщает идентификатор владельца браслета, а в зависимости от типа этого идентификатора определяется, оповещать ли о тревоге.
9. Система по п. 7, отличающаяся тем, что когда упомянутое сенсорное устройство является видеокамерой, в качестве дополнительных характеристик объекта, являющегося человеком, задаются, по меньшей мере, следующие характеристики: пол объекта, наличие у объекта сумки, зонта, головного убора, усов, бороды.
10. Система по п. 1, отличающаяся тем, что упомянутое уведомление пользователя может быть, по меньшей мере, визуальным, звуковым, текстовым.
11. Компьютерно-реализованное устройство обнаружения тревожных траекторий движения объектов, содержащее:
сенсорное устройство, выполненное с возможностью предоставления метаданных объектов, при этом метаданные представляют собой набор положений объектов в определенные моменты времени,
при этом упомянутое устройство обнаружения тревожных траекторий движения объектов адаптируется для выполнения классификации, сбора и обработки метаданных объектов, предоставленных сенсорным устройством;
графический пользовательский интерфейс, содержащий средства ввода и вывода данных, где упомянутые средства ввода содержат
блок задания правил, выполненный с возможностью задания правил определения того, какие траектории движения объектов являются тревожными, при этом упомянутые правила зависят от типа сенсорного устройства, которое предоставляет метаданные объектов; и
блок классификации траекторий движения объектов, выполненный с возможностью проверки каждой траектории движения по правилам, заданным в блоке задания правил, с целью обнаружения тревожных траекторий движения объектов,
при этом блок классификации траекторий движения объектов также выполнен с возможностью отправки уведомления пользователю, в случае если траектория движения оказалась или стала тревожной с течением заданного времени.
12. Устройство по п. 11, отличающееся тем, что в качестве правил определения того, какие траектории движения объектов являются тревожными, определены следующие:
- факт наличия пересечения траектории движения объекта и некоторой поверхности в пространстве координат объектов;
- факт попадания траектории по меньшей мере одного объекта в некоторую область в пространстве координат объектов;
- факт покидания траектории по меньшей мере одного объекта некоторой области в пространстве координат объектов;
- факт появления траектории по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- факт исчезновения траектории по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- факт начала движения, по меньшей мере, одного объекта в некоторой области в пространстве координат объектов;
- факт остановки по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- определение временной длительности нахождения траектории движения по меньшей мере одного объекта внутри некоторой области в пространстве координат объектов;
- факт одновременного нахождения внутри некоторой области нескольких объектов.
13. Устройство по п. 11, отличающееся тем, что упомянутый графический пользовательский интерфейс адаптирован для отображения координат положений объектов, полученных от упомянутого сенсорного устройства, по меньшей мере, на изображении, снимке или карте местности.
14. Устройство по п. 12, отличающееся тем, что упомянутая поверхность, которая пересекает траекторию движения объекта является виртуальной и является по меньшей мере одним из следующего: изогнутой поверхностью, мульти-сегментной поверхностью или несколькими параллельными поверхностями.
15. Устройство по п. 12, отличающееся тем, что положения объектов представлены в виде двумерных координат, при этом упомянутая поверхность является линией.
16. Устройство по п. 12, отличающееся тем, что при проверке каждой траектории движения по заданным правилам учитываются, по меньшей мере, следующие параметры объекта: направление движения, тип, скорость, размер.
17. Устройство по п. 16, отличающееся тем, что когда упомянутое сенсорное устройство является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты, данное устройство сообщает идентификатор владельца браслета, а в зависимости от типа этого идентификатора определяется, оповещать ли о тревоге.
18. Устройство по п. 16, отличающееся тем, что когда упомянутое сенсорное устройство является видеокамерой в качестве дополнительных характеристик объекта, являющегося человеком, задаются, по меньшей мере, следующие характеристики: пол объекта, наличие у объекта сумки, зонта, головного убора, усов, бороды.
19. Устройство по п. 11, отличающееся тем, что упомянутое уведомление пользователя может быть, по меньшей мере, визуальным, звуковым, текстовым.
20. Способ обнаружения тревожных траекторий движения объектов, реализованный вычислительной системой и содержащий этапы, на которых:
предоставляют метаданные объектов посредством сенсорного устройства, при этом метаданные представляют собой набор положений объектов в определенные моменты времени;
выполняют классификацию, сбор и обработку метаданных объектов, предоставленных сенсорным устройством, посредством компьютерной системы, включающей память и по меньшей мере один процессор;
задают правила определения того, какие траектории движения объектов являются тревожными, посредством блока задания правил графического пользовательского интерфейса, при этом упомянутые правила зависят от типа сенсорного устройства, которое предоставляет метаданные объектов;
осуществляют проверку каждой траектории движения по правилам, заданным в блоке задания правил, посредством блока классификации траекторий движения объектов, с целью обнаружения тревожных траекторий движения объектов; и
осуществляют отправку уведомления пользователю, в случае если траектория движения оказалась или стала тревожной с течением заданного времени, посредством блока классификации траекторий движения объектов.
21. Способ по п. 20, отличающийся тем, что выполнение классификации, сбора и обработки метаданных объектов также осуществляется посредством видеокамеры или эти этапы разделены оператором системы между видеокамерой и компьютерной системой.
22. Способ по п. 20, отличающийся тем, что в качестве правил определения того, какие траектории движения объектов являются тревожными, определены следующие:
- факт наличия пересечения траектории движения объекта и некоторой поверхности в пространстве координат объектов;
- факт попадания траектории по меньшей мере одного объекта в некоторую область в пространстве координат объектов;
- факт покидания траектории по меньшей мере одного объекта некоторой области в пространстве координат объектов;
- факт появления траектории по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- факт исчезновения траектории по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- факт начала движения по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- факт остановки по меньшей мере одного объекта в некоторой области в пространстве координат объектов;
- определение временной длительности нахождения траектории движения по меньшей мере одного объекта внутри некоторой области в пространстве координат объектов;
- факт одновременного нахождения внутри некоторой области нескольких объектов.
23. Способ по п. 20, отличающийся тем, что упомянутый графический пользовательский интерфейс адаптирован для отображения координат положений объектов, полученных от упомянутого сенсорного устройства, по меньшей мере, на изображении, снимке или карте местности.
24. Способ по п. 22, отличающийся тем, что упомянутая поверхность, которая пересекает траекторию движения объекта, является виртуальной и является по меньшей мере одним из следующего: изогнутой поверхностью, мульти-сегментной поверхностью или несколькими параллельными поверхностями.
25. Способ по п. 22, отличающийся тем, что положения объектов представлены в виде двумерных координат, при этом упомянутая поверхность является линией.
26. Способ по п. 22, отличающийся тем, что при проверке каждой траектории движения по заданным правилам учитываются, по меньшей мере, следующие параметры объекта: направление движения, тип, скорость, размер.
27. Способ по п. 26, отличающийся тем, что когда упомянутое сенсорное устройство является браслетом охранной системы, предоставляющим GPS или ГЛОНАСС координаты, данное устройство сообщает идентификатор владельца браслета, а в зависимости от типа этого идентификатора определяется, оповещать ли о тревоге.
28. Способ по п. 26, отличающийся тем, что когда упомянутое сенсорное устройство является видеокамерой в качестве дополнительных характеристик объекта, являющегося человеком, задаются, по меньшей мере, следующие характеристики: пол объекта, наличие у объекта сумки, зонта, головного убора, усов, бороды.
29. Способ по п. 20, отличающийся тем, что упомянутое уведомление пользователя может быть, по меньшей мере, визуальным, звуковым, текстовым.
30. Считываемый компьютером носитель данных, содержащий выполняемые посредством процессора компьютера инструкции для осуществления способа обнаружения тревожных траекторий движения объектов по любому из пп. 20-29.
| US 8305441 B2, 06.11.2012 | |||
| RU 2015138958 A1, 19.04.2017 | |||
| US 6028629 A1, 22.02.2000 | |||
| US 20170024986 A1, 26.01.2017 | |||
| Стабилизатор напряжения переменного тока | 1962 |
|
SU151712A1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА И СПОСОБ ЕЁ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2533645C2 |
| Ртутный вентиль | 1958 |
|
SU120270A1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ УЧАСТНИКОВ ДОРОЖНОГО ДВИЖЕНИЯ | 2015 |
|
RU2598362C1 |

