Область техники
Настоящее изобретение относится к транспортному средству и к управлению рулением транспортного средства, которые могут обеспечивать способность к прямолинейному движению.
Уровень техники
Традиционно в узле подвески для транспортного средства, достижение целевых рабочих характеристик подвески должно реализовываться посредством задания оси поворотного шкворня.
Например, в технологии, описанной в Патентном Документе 1, тяги узла подвески выполнены с возможностью подавлять движение вперед или назад автомобиля относительно верхних и нижних точек поворота, составляющих поворотный шкворень, во время руления транспортного средства, чтобы повышать маневренность и стабильность.
Патентные документы
Патентный Документ 1: Первая публикация заявки на патент Японии (tokkai) № 2010-126014.
Задачи, решаемые изобретением
Тем не менее, в случае если операция руления выполняется во время движения транспортного средства, поперечная сила в соответствии со скоростью движения вводится в точку контакта шины транспортного средства с поверхностью дороги. В технологии, описанной в Патентном Документе 1, не рассматривается влияние, вызываемое поперечной силой. Следовательно, существует запас для улучшения относительно уменьшения момента, сформированного вокруг оси поворотного шкворня во время руления. Другими словами, традиционный узел автомобильной подвески имеет запас для улучшения в том, чтобы пытаться повышать маневренность и стабильность транспортного средства. Задача настоящего изобретения состоит в том, чтобы повышать маневренность и стабильность узла подвески в транспортном средстве.
Средство для решения задачи
Для решения вышеописанной задачи один вариант осуществления автомобильного транспортного средства согласно настоящему изобретению содержит: систему управления рулением, которая управляет управляемыми колесами; и узел подвески, подвешивающий управляемые колеса на кузове транспортного средства, причем узел подвески выполнен с возможностью задавать ось поворотного шкворня таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля, при этом вышеописанная система управления рулением приводит в действие актуатор, чтобы формировать восстанавливающую силу для стабилизации на управляемых колесах, чтобы управлять управляемыми колесами, чтобы обеспечивать способность к прямолинейному движению транспортного средства.
Преимущества изобретения
Согласно настоящему изобретению момент вокруг оси поворотного шкворня может быть задан еще меньшим, так что может быть выполнено руление за счет меньшей осевой силы зубчатой рейки. Следовательно, например, направление ходовых колес может управляться за счет меньшей силы. Далее, способность к прямолинейному движению узла подвески может обеспечиваться посредством секции обеспечения способности к прямолинейному движению в системе управления рулением.
Следовательно, могут быть повышены маневренность и стабильность транспортного средства.
Краткое описание чертежей
Фиг.1 является видом примерной конфигурации, представляющим конструкцию автомобильного транспортного средства 1 в первом предпочтительном варианте осуществления.
Фиг.2 является видом в перспективе, схематически представляющим конструкцию узла 1B подвески.
Фиг.3 является видом сверху, схематически представляющим конструкцию узла 1B подвески.
Фиг.4(a) и 4(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематически представляющими конструкцию узла 1B подвески.
Фиг.5 является графиком, представляющим взаимосвязь между ходом зубчатой рейки и осевой силой зубчатой рейки во время операции руления.
Фиг.6 является графиком, представляющим траекторию области контакта шины с поверхностью дороги транспортного средства во время операции руления.
Фиг.7 является видом карты изолиний, представляющим один пример распределения осевой силы зубчатой рейки в системе координат с углом поперечного наклона поворотного шкворня и радиусом плеча обкатки колеса в качестве поперечной оси системы координат и ее продольной оси.
Фиг.8 является графиком, представляющим результат анализа осевой силы зубчатой рейки в узле 1B подвески.
Фиг.9 является графиком, представляющим взаимосвязь между точкой соприкосновения с поверхностью дороги оси поворотного шкворня и поперечной силой.
Фиг.10 является концептуальным видом для пояснения стабилизирующего крутящего момента в случае положительного плеча обкатки колеса.
Фиг.11 является блок-схемой, представляющей конкретную конструкцию системы управления рулением на Фиг.1.
Фиг.12 является графиком, представляющим карту управления сформированным крутящим моментом для оценки стабилизирующего крутящего момента.
Фиг.13(a) и 13(b) являются графиками, представляющими характеристики узла подвески, причем Фиг.13(a) является видом, представляющим взаимосвязь между углом продольного наклона поворотного шкворня, характеристикой отклика и стабильностью, а Фиг.13(b) является видом, представляющим взаимосвязь между плечом стабилизации, допустимым запасом уменьшения поперечной силы и способностью к прямолинейному движению.
Фиг.14 является видом в перспективе узла подвески во втором предпочтительном варианте осуществления.
Фиг.15 является видом спереди с Фиг.14.
Фиг.16 является видом сбоку с Фиг.14.
Фиг.17 является видом сверху с Фиг.14.
Фиг.18 является видом сверху, представляющим нижний рычаг, применимый ко второму предпочтительному варианту осуществления.
Фиг.19 является видом в перспективе, представляющим подрамник, чтобы крепить нижний рычаг, показанный на Фиг.18.
Фиг.20(a), 20(b) и 20(c) являются видом в перспективе, видом спереди и видом сбоку, представляющими узел подвески в модификации узла подвески в первом и втором вариантах осуществления.
Фиг.21 является видом примерной конфигурации, представляющим конструкцию автомобильного транспортного средства 1, связанного с третьим предпочтительным вариантом осуществления согласно настоящему изобретению.
Фиг.22 является блок-схемой, представляющей один пример системы управления рулением в третьем предпочтительном варианте осуществления согласно настоящему изобретению.
Фиг.23 является видом, представляющим карту управления сформированным крутящим моментом, чтобы оценивать стабилизирующий крутящий момент.
Фиг.24(a) и 24(b) являются видами, представляющими характеристики узла подвески, причем Фиг.24(a) является графиком, представляющим взаимосвязь между углом продольного наклона поворотного шкворня, характеристикой отклика и стабильностью, а Фиг.24(b) является видом, представляющим взаимосвязь между плечом стабилизации, допустимым запасом уменьшения поперечной силы и способностью к прямолинейному движению.
Фиг.25(a) и 25(b) являются графиками, представляющими характеристики отклика при рулении, причем Фиг.25(a) является графиком, представляющим варьирование в характеристике отклика транспортного средства, а Фиг.25(b) является графиком, представляющим время переключения характеристики управления.
Фиг.26 является блок-схемой последовательности операций способа, представляющей пример процесса управления углом поворота при рулении.
Фиг.27 является блок-схемой, представляющей варьирование секции управления рулением в третьем предпочтительном варианте осуществления.
Фиг.28 является блок-схемой, представляющей другое варьирование секции управления рулением в третьем предпочтительном варианте осуществления.
Фиг.29 является блок-схемой, представляющей секцию управления рулением в четвертом предпочтительном варианте осуществления согласно настоящему изобретению.
Фиг.30 является блок-схемой последовательности операций способа, представляющей один пример процесса управления углом поворота при рулении в четвертом варианте осуществления.
Фиг.31 является блок-схемой последовательности операций способа, представляющей один пример процесса регулирования характеристики отклика при рулении.
Подробное описание вариантов осуществления изобретения
В дальнейшем в этом документе описываются предпочтительные варианты осуществления автомобильного транспортного средства, к которому применяется настоящее изобретение, со ссылкой на прилагаемые чертежи.
Первый вариант осуществления изобретения
Конструкция
Фиг.1 является видом примерной конфигурации, представляющим конструкцию автомобильного транспортного средства C, связанного с первым предпочтительным вариантом осуществления, которая является основной конструкцией настоящего изобретения.
На Фиг.1 автомобильное транспортное средство 1 включает в себя кузов 1A транспортного средства. Этот кузов 1A транспортного средства содержит узел 1B подвески, поддерживающий ходовые колеса WFR, WFL, WRR и WRL, и систему SS рулевого управления, которая управляет управляемыми колесами WFR и WFL на стороне передних ходовых колес. Система SS рулевого управления включает в себя механизм SM рулевого управления и систему EP электрического усилителя рулевого управления (усилителя рулевого управления, приводимого в действие при помощи электроэнергии), предоставляющую силу помощи при рулении в этот механизм рулевого управления.
Механизм SM рулевого управления включает в себя: поворотную рулевую ось SSi на входной стороне; поворотную рулевую ось SSo на выходной стороне; руль SW, ведущую шестерню PG; ось LS зубчатой рейки и поперечные рулевые тяги TR, TR.
Руль SW прикрепляется к верхушке в направлении задней стороны транспортного средства к поворотной рулевой оси SSi на входной стороне. Затем поворотная рулевая ось SSi на входной стороне и поворотная рулевая ось SSo на выходной стороне поддерживаются с возможностью вращения на кузове 1A транспортного средства и сцепляются друг с другом через торсионный вал (не показан).
Ведущая шестерня PG соединяется в направлении передней стороны транспортного средства с поворотной рулевой осью SSo на выходной стороне и зацепляется с шестерней зубчатой рейки, сформированной на оси LS зубчатой рейки, так что они составляют механизм реечной передачи. Этот механизм реечной передачи преобразует вращательное движение руля SW в прямолинейное движение в направлении ширины транспортного средства. Поперечные рулевые тяги TR, TR соединяются между обоими концами оси LS зубчатой рейки и между управляемыми колесами WFR, WFL. Эти поперечные рулевые тяги TR сцепляются между обоими концами оси LS зубчатой рейки и рычагами поворотного кулака ходовых колес WFR, WFL через шаровые шарниры соответственно.
С другой стороны, система EP электрического усилителя рулевого управления включает в себя датчик AS угла поворота при рулении, определяющий угол поворота при рулении руля SW, прикрепленного к поворотной рулевой оси SSi на входной стороне; датчик TS крутящего момента поворота при рулении, определяющий крутящий момент поворота при рулении на основе разности углов поворота между поворотной рулевой осью SSi на входной стороне и поворотной рулевой осью SSo на выходной стороне; электрический актуатор WA, который передает силу управления рулением для поворотной рулевой оси SSo на выходной стороне; и датчик RS угла вращения, определяющий угол вращения электрического актуатора EA. Следует отметить, что этот электрический актуатор EA состоит из электромотора, а шестерня, неразъемно вращаемая с валом электромотора для электромотора, зацепляется с шестерней, сформированной со стороны поворотной рулевой оси SSo на выходной стороне, чтобы вращать поворотную рулевую ось SSo на выходной стороне.
Помимо этого система EP электрического усилителя рулевого управления включает в себя: систему CT управления рулением, которая управляет с возможностью приведения в действие электрическим актуатором EA; датчики WSFR, WSFL, WSRR, WSRL скорости ходовых колес, определяющие скорости ходовых колес соответствующих ходовых колес WFR, WFL, WRR, WRL; и секцию CP получения параметров состояния транспортного средства.
Секция CP получения параметров состояния транспортного средства получает скорость транспортного средства на основе импульсных сигналов, представляющих скорости вращения ходовых колес, выводимые из датчиков WFR, WFL, WRR, WRL скорости ходовых колес. Помимо этого секция CP получения параметров состояния транспортного средства получает скорость скольжения (проскальзывание) каждого ходового колеса на основе скорости транспортного средства и скорости вращения каждого ходового колеса. Кроме того, секция CP получения параметров состояния транспортного средства выводит каждый параметр, полученный в ней, в систему CS управления.
Система CT управления рулением вводит угол θs поворота при рулении, определенный посредством датчика 4 угла поворота при рулении, крутящий момент Ts поворота при рулении, определенный посредством датчика TS крутящего момента поворота при рулении, и угол θa вращения актуатора, определенный посредством датчика RS угла вращения.
Эта система CT управления рулением включает в себя: секцию PC управления усилителем рулевого управления и секцию SG обеспечения способности к прямолинейному движению. Секция PC управления усилителем рулевого управления вычисляет целевой вспомогательный крутящий момент поворота при рулении на основе крутящего момента Ts поворота при рулении и скорости V транспортного средства, вычисляет ток приведения в действие, приводящий в действие электрический актуатор EA, на основе вычисленного целевого вспомогательного крутящего момента поворота при рулении и управляет с возможностью приведения в действие электрическим актуатором EA, подавая этот ток приведения в действие в электрический актуатор EA.
Секция SG обеспечения способности к прямолинейному движению выполняет управление дополнением способности к прямолинейному движению, чтобы дополнить способность к прямолинейному движению узла 1B подвески, как описано ниже. Каждое из ходовых колес WFR, WFL, WRR, WRL состоит из шины, прикрепленной к механизму WH ступицы колеса, и устанавливается на кузове 1A транспортного средства через узел 1B подвески. На передних ходовых колесах, которые являются управляемыми колесами WFL, WFR, рычаги поворотного кулака качаются за счет поперечных рулевых тяг 15, так что изменяется направление ходовых колес WFR, WFL относительно кузова 1A транспортного средства.
Фиг.2 является видом в перспективе, схематически представляющим конструкцию узла 1B подвески, связанного с первым вариантом осуществления. Фиг.3 является видом сверху, схематически представляющим конструкцию узла 1B подвески на Фиг.2. Фиг.4(a) и 4(b) являются видом спереди в частичном сечении и видом сбоку в частичном сечении, схематически представляющими конструкцию узла 1B подвески на Фиг.2. Как показано на Фиг.2-4(b), узел 1B подвески подвешивает ходовые колеса 17FR, 17FL, прикрепленные к механизмам WH ступиц колес, и включает в себя стакан 33 оси, имеющий ось 32, поддерживающую с возможностью вращения каждое из ходовых колес 17FR, 17FL; множество элементов тяг, расположенных в направлении ширины кузова транспортного средства от опорной секции узла 1B подвески на стороне кузова транспортного средства и сцепленных со стаканом 33 оси каждого переднего ходового колеса 17FR, 17FL; пружинные элементы 34, 34, состоящие из спиральных пружин, и т.д.
Множество элементов тяг состоят из: первых тяг (первых элементов тяг) 37, 37; вторых тяг (вторых элементов тяг) 38, 38, причем обе из первых и вторых тяг являются нижними элементами тяг; поперечных рулевых тяг (элементов поперечных рулевых тяг) 15, 15; и стоек (пружинных элементов 34, 34 и амортизаторов 40, 40). В этом варианте осуществления узел 1B подвески является подвеской стоечного типа, причем верхний конец каждой из стоек, которая объединяется с соответствующим пружинным элементом 34 и каждым амортизатором 40, соединяется с опорной секцией стороны кузова транспортного средства, расположенной в более дальней верхней стороне, чем оси 32, 32 (в дальнейшем в этом документе, верхний конец каждой стойки надлежащим образом упоминается в качестве верхней точки поворота). Первые тяги 37, 37 и вторые тяги 38, 38, которые являются соответственно нижними рычагами, сцепляются с нижними концами стаканов 33, 33 осей и опорными секциями стороны кузова транспортного средства, расположенной в более низкой позиции, чем оси 32, 32. Каждый из этих нижних рычагов содержит конфигурацию A-образного рычага, к примеру, чтобы поддерживаться на стороне кузова транспортного средства в двух местоположениях и сцепляться с соответствующей осью 32 в одном местоположении (в дальнейшем в этом документе, секция рычажного механизма между каждым из нижних рычагов и соответствующим одним из стаканов 33, 33 оси зачастую надлежащим образом упоминается в качестве нижней точки поворота).
Каждая из поперечных рулевых тяг 15, 15 размещается на нижней стороне соответствующих одной из осей 32, 32 и служит для того, чтобы обеспечивать сцепление между осью 14 зубчатой рейки и соответствующим одним из стаканов 33, 33 оси, и ось 14 зубчатой рейки формирует осевую силу для цели руления с вращающей силой (силой поворота при рулении), передаваемой из руля 2. Следовательно, поперечные рулевые тяги 15, 15 служат для того, чтобы прикладывать осевую силу в направлении ширины транспортного средства к стаканам 33, 33 оси в соответствии с вращением руля 2, так что руление ходовых колес 17FR, 17FL выполняется через стаканы 33, 33 оси.
Согласно настоящему изобретению в состоянии, в котором руль 2 находится в нейтральной позиции, а именно в состоянии, в котором управляемые колеса 17FL, 17FR находятся в состоянии движения по прямой, ось KS поворотного шкворня, соединяющая верхнюю точку P1 поворота узла 1B подвески и ее нижнюю точку P2 поворота, задается таким образом, что точка контакта с поверхностью дороги оси KS поворотного шкворня размещается в области контакта шины с поверхностью дороги (пятне контакта шины), и таким образом, что плечо стабилизации размещается в области контакта с дорогой шины. Более конкретно, в узле 1B подвески в этом варианте осуществления ось KS поворотного шкворня задается так, что она формирует угол продольного наклона поворотного шкворня близким к нулю и приближает плечо стабилизации к нулю. Таким образом, может быть уменьшен крутильный крутящий момент шины во время операции руления и может быть задан еще меньшим момент вокруг оси KS поворотного шкворня. Помимо этого радиус плеча обкатки колеса задается как положительное плечо обкатки колеса, равное или большее нуля. Таким образом, плечо стабилизации варьируется согласно радиусу плеча обкатки колеса, и может обеспечиваться способность к прямолинейному движению.
В дальнейшем в этом документе подробно поясняется геометрия подвески в узле 1B подвески (анализ компонентов осевой силы зубчатой рейки). Фиг.5 показывает график, представляющий взаимосвязь между ходом зубчатой рейки и осевой силой зубчатой рейки во время операции руления.
Как показано на Фиг.5, компоненты осевой силы зубчатой рейки включают в себя, главным образом, крутильный крутящий момент шины и крутящий момент при подъеме ходового колеса, и крутильный крутящий момент шины является преобладающим из этих крутящих моментов.
Следовательно, если крутильный крутящий момент шины становится небольшим, может быть уменьшена осевая сила зубчатой рейки.
Минимизация крутильного крутящего момента шины
Фиг.6 показывает траекторию центра области контакта шины с поверхностью дороги во время операции руления.
На Фиг.6 совместно показываются случай, в котором перемещение центра области контакта шины с поверхностью дороги во время операции руления является большим, и случай, в котором перемещение центра области контакта шины с поверхностью дороги во время операции руления является небольшим. В результате анализа вышеописанных компонентов осевой силы зубчатой рейки эффективно минимизировать крутильный крутящий момент шины во время операции руления, чтобы уменьшать осевую силу зубчатой рейки.
Другими словами, чтобы минимизировать крутильный крутящий момент шины во время операции руления, как показано на Фиг.6, может задаваться небольшим варьирование в траектории центра области контакта шины с поверхностью дороги во время операции руления.
Другими словами, если центр области контакта шины с поверхностью дороги и точка контакта с поверхностью дороги оси поворотного шкворня становятся совпадающими друг с другом, может быть минимизирован крутильный крутящий момент шины.
В частности, как описано ниже, эффективно обеспечивать положительное плечо обкатки колеса, имеющее 0 мм для плеча стабилизации и радиус плеча обкатки колеса, равный или больший 0 мм.
Влияние угла поперечного наклона поворотного шкворня
Фиг.7 является картой изолиний, представляющей один пример распределения осевой силы зубчатой рейки в системе координат с углом поперечного наклона поворотного шкворня и радиусом плеча обкатки колеса в качестве оси в случае, если осевая сила зубчатой рейки представляет собой любой из трех случаев: как большая, средняя и небольшая.
По мере того как становится больше угол поперечного наклона поворотного шкворня относительно идентичного крутильного крутящего момента шины, его вращающий момент оси поворотного шкворня становится большим и осевая сила зубчатой рейки становится большей. Следовательно, в качестве угла поперечного наклона поворотного шкворня желательно задавать угол поперечного наклона поворотного шкворня, чтобы он был меньше постоянного значения. Тем не менее, из взаимосвязи радиуса плеча обкатки колеса, если, например, угол поперечного наклона поворотного шкворня задается равным или меньше 15 градусов, осевая сила зубчатой рейки может задаваться так, что она является небольшой до требуемого уровня.
Следует отметить, что область, обведенная посредством штрихпунктирной линии (граничной линии) на Фиг.7, указывает область, в которой угол поперечного наклона поворотного шкворня меньше 15 градусов, через которую поперечная сила может оцениваться как значение, превышающее предел трения в области ограничения поворота, и радиус плеча обкатки колеса равен или превышает 0 мм с точки зрения крутильного крутящего момента шины.
В этом варианте осуществления эта область (направление, в котором угол поперечного наклона поворотного шкворня снижается от 15 градусов в поперечной оси по Фиг.7, и направление, в котором радиус плеча обкатки колеса увеличивается от нуля в продольной оси по Фиг.7) предполагается в качестве области, более подходящей для задания угла поперечного наклона поворотного шкворня и радиуса плеча обкатки колеса.
В частности, в случае если определяются радиус плеча обкатки колеса и угол поперечного наклона поворотного шкворня, например, изолиния, представляющая распределение осевой силы зубчатой рейки, показанная на Фиг.7, аппроксимируется в качестве кривой линии n-го порядка (n обозначает целое число, равное или большее 2), и от внутренней части области, обведенной посредством вышеописанной штрихпунктирной линии, могут приспосабливаться значения угла поперечного наклона поворотного шкворня и радиуса плеча обкатки колеса, заданные согласно позиции точки перегиба (или пикового значения) кривой линии n-го порядка.
Пример минимизации осевой силы зубчатой рейки
Фиг.8 является графиком, представляющим результат анализа осевой силы зубчатой рейки в узле 1B подвески в предпочтительном варианте осуществления.
Сплошная линия, показанная на Фиг.8, обозначает характеристику осевой силы зубчатой рейки в конструкции подвески, показанной на Фиг.2-4(b), когда угол продольного наклона поворотного шкворня задается равным 0 градусов, плечо стабилизации задается равным 0 мм и радиус плеча обкатки колеса задается равным +10 мм.
Следует отметить, что на Фиг.8 показан сравнительный пример (пунктирная линия), когда выполняются настройки, связанные с осью поворотного шкворня, в соответствии с конструкцией, в которой не устанавливается система рулевого управления на основе управления по проводам, хотя конструкция подвески имеет идентичный тип с узлом 1B подвески, в связи с настоящим изобретением.
Как показано на Фиг.8, осевая сила зубчатой рейки может быть уменьшена приблизительно на 30% относительно сравнительного примера, когда выполняются настройки в соответствии с результатом пояснения, описанного выше.
Как описано выше, поскольку угол продольного наклона поворотного шкворня в 0 градусов может повышать жесткость подвески, плечо стабилизации в 0 мм означает, что место соприкосновения с поверхностью дороги (точка контакта с землей) оси KS поворотного шкворня становится совпадающим с центральной точкой контакта (соприкосновения) шины с поверхностью дороги (точкой приложения силы) 0 в области контакта (соприкосновения) шины с поверхностью дороги, как обозначено посредством ссылки с номером 3 на Фиг.9, который представляет взаимосвязь между местом соприкосновения с поверхностью дороги (точкой контакта с землей) оси KS поворотного шкворня и поперечной силой, и это позволяет повышать эффект большого уменьшения поперечной силы. Следует отметить, что даже если место соприкосновения оси KS поворотного шкворня в области контакта шины, включающей в себя центральную точку (контакта) с землей шины, представляет собой ссылку с номером 2 или ссылку с номером 4, поперечная сила может быть уменьшена по сравнению со случаем, когда позиция контактной точки (точки контакта с землей) оси KS поворотного шкворня отклоняется от области контакта шины в прямом или обратном направлении транспортного средства, как обозначено посредством ссылочной позиции 1 или 5. В частности, поперечная сила в случае, если контактная точка оси KS поворотного шкворня размещается дальше к передней стороне транспортного средства, чем центральная точка контакта (соприкосновения) шины (точка приложения силы), подавляется так, что она меньше, чем в случае, в котором точка контакта с землей оси KS поворотного шкворня размещается дальше к задней стороне транспортного средства, чем центральная точка контакта (соприкосновения) шины (точка приложения силы).
Обеспечение способности к прямолинейному движению согласно положительному плечу обкатки колеса
Фиг.10 показывает концептуальный вид для пояснения стабилизирующего крутящего момента в случае, если задается положительное плечо обкатки колеса. На Фиг.10, когда центробежная сила, направленная за пределы поворота кузова транспортного средства, действует на центральную точку контакта (соприкосновения) шины с поверхностью дороги (точку приложения силы) 0 во время операции руления, формируется поперечная сила, направленная к оси поворота против этой центробежной силы. Следует отметить, что β обозначает угол бокового скольжения.
Как показано на Фиг.10, восстанавливающая сила (стабилизирующий крутящий момент), действующая на шину, становится большой пропорционально сумме плеча стабилизации и увода пневматической шины.
Следует отметить, что в случае положительного плеча обкатки колеса расстояние εc (см. Фиг.10) от центра колеса с шиной, заданное согласно позиции опоры, перпендикулярной линии, опускающейся к прямой линии в направлении угла β бокового скольжения шины, проходящей через центр шины, предположительно может быть плечом стабилизации. Следовательно, по мере того как радиус плеча обкатки колеса для положительного плеча обкатки колеса становится большим, восстанавливающая сила, действующая на шину во время операции руления, становится большей. В этом варианте осуществления влияние приближения угла продольного наклона поворотного шкворня к нулю на способность к прямолинейному движению может быть уменьшено посредством задания положительного плеча обкатки колеса.
Пример конструктивного исполнения подвески
Настоящие заявители подтверждают, что в случае, если в конструкции узла 1B подвески, показанного на Фиг.2-4(b), в соответствии с вышеописанным результатом пояснения угол поперечного наклона поворотного шкворня составляет 13,8 градусов, плечо стабилизации составляет 0 мм, радиус плеча обкатки колеса составляет 5,4 мм (положительное плечо обкатки колеса), угол продольного наклона поворотного шкворня составляет 5,2 градусов, смещение поворотного шкворня на высоте центра колеса составляет 86 мм, осевая сила зубчатой рейки может быть уменьшена приблизительно на 30%.
Следует отметить, что поскольку для расчетного значения, описанного выше, в ходе торможения транспортного средства нижний элемент тяги подвески перемещается в обратном направлении транспортного средства и в это время нижний конец поворотного шкворня перемещается аналогично в обратном направлении транспортного средства, угол продольного наклона поворотного шкворня принимает постоянный наклон назад. В этой связи, в случае если угол продольного наклона поворотного шкворня равен или меньше 0 градусов (в случае, если ось KS поворотного шкворня находится в состоянии наклона вперед), момент зубчатой рейки во время операций руления и торможения становится большим, так что возрастает осевая сила зубчатой рейки. Следовательно, позиция оси KS поворотного шкворня является предписанной, как описано выше.
Другими словами, нижняя точка поворота поворотного шкворня (включающая в себя виртуальную точку поворота) находится в позиции сзади центра колеса, и верхняя точка поворота поворотного шкворня (включающая в себя виртуальную точку поворота) находится в позиции впереди нижней точки поворота.
Далее описывается конкретная конструкция системы CT управления рулением со ссылкой на Фиг.11-13(b).
Секция PC управления усилителем рулевого управления, как показано на Фиг.11, включает в себя: секцию TO вычисления значений команд управления током целевого вспомогательного крутящего момента и секцию AC управления током актуатора. Секция TO вычисления значений команд управления током целевого вспомогательного крутящего момента обращается к карте управления на основе крутящего момента Ts поворота при рулении, определенного посредством датчика TS крутящего момента поворота при рулении и скорости V транспортного средства, чтобы вычислять значение It* команды управления током целевого вспомогательного крутящего момента, которое согласуется с крутящим моментом Ts поворота при рулении, и выводит вычисленное значение It* команды управления током целевого вспомогательного крутящего момента в сумматор AD. Этот сумматор AD суммирует значение Isa* команды управления целевым током для обеспечения способности к прямолинейному движению, как описано ниже, со значением It* команды управления током целевого вспомогательного крутящего момента, чтобы вычислять целевой ток Ia* актуатора, причем вычисленный целевой ток Ia* актуатора выводится в модуль SB вычитания. Ток Iad актуатора, определенный посредством датчика CS тока актуатора, который подается в электрический актуатор EA, возвращается в этот модуль SB вычитания. Следовательно, модуль SB вычитания вычисляет отклонение AI тока посредством вычитания тока Iad актуатора из значения Ia* команды управления целевым током актуатора.
Секция AC управления током актуатора, например, выполняет управление PID (пропорционально-интегрально-дифференциальное) для отклонения ΔI тока, введенного из модуля SB вычитания, чтобы вычислять ток Iad актуатора, и выводит вычисленный ток Iad актуатора в электрический актуатор EA. С другой стороны, секция SG обеспечения способности к прямолинейному движению вычисляет стабилизирующий крутящий момент Tsa и вычисляет значение Isa* команды управления целевым током для обеспечения способности к прямолинейному движению, которое обеспечивает способность к прямолинейному движению узла 1B подвески на основе вычисленного стабилизирующего крутящего момента Tsa. Конкретная конструкция этой секции SG обеспечения способности к прямолинейному движению является следующей. Другими словами, движущие силы левых и правых ходовых колес TR и TL, выведенные из секции DC управления движущей силой, которая распределяет и управляет движущими силами правых и левых ведущих колес, вводятся в секцию SG обеспечения способности к прямолинейному движению, и крутящий момент Ts поворота при рулении, определенный посредством датчика ST крутящего момента поворота при рулении, вводится в нее, чтобы вычислять стабилизирующий крутящий момент Tsa на основе этих вводов. Помимо этого секция SG обеспечения способности к прямолинейному движению умножает вычисленный стабилизирующий крутящий момент Tsa на предварительно определенное усиление Ki по току, чтобы вычислять значение Isa* команды управления целевым током для обеспечения способности к прямолинейному движению (=Ki·Tsa).
Следует отметить, что вычисление стабилизирующего крутящего момента Tsa в секции SG обеспечения способности к прямолинейному движению выполняется следующим образом. Другими словами, сначала вычисляется разность ΔT движущих сил (=TL-TR) для движущих сил TR и TL правых и левых ходовых колес и анализируется карта управления для оценки сформированного крутящего момента, показанная на Фиг.12, на основе вычисленной разности ΔT движущих сил, чтобы оценивать сформированный крутящий момент Th, сформированный во время операции руления вследствие явления паразитного силового подруливания.
Эта карта управления для оценки сформированного крутящего момента задается для транспортного средства, в котором радиус плеча обкатки колеса является положительным, а именно приспосабливается положительное плечо обкатки колеса. Эта карта управления для оценки сформированного крутящего момента подготавливается следующим образом. Другими словами, поперечная ось по Фиг.12 обозначает разность ΔT движущих сил, а продольная ось по Фиг.12 обозначает сформированный крутящий момент Th. Когда разность ΔT движущих сил увеличивается от нуля до положительного направления, а именно когда движущая сила TL левых колес увеличивается с превышением движущей силы TR правых колес, сформированный крутящий момент Th задается пропорционально увеличению разности ΔT движущих сил, к примеру, так что он увеличивается от нуля в положительном направлении, в котором транспортное средство поворачивает в направлении вправо (положительном направлении). С другой стороны, когда разность ΔT движущих сил увеличивается от нуля до отрицательного направления, а именно когда движущая сила TR правых колес увеличивается с превышением движущей силы TL левых колес, сформированный крутящий момент Th задается пропорционально увеличению разности ΔT движущих сил, к примеру, так что он увеличивается от нуля в направлении, в котором транспортное средство поворачивает в направлении влево (отрицательном направлении).
Затем секция SG обеспечения способности к прямолинейному движению вычитает сформированный крутящий момент Th из крутящего момента Ts поворота при рулении, определенного посредством датчика 5 крутящего момента поворота при рулении, чтобы вычислять стабилизирующий крутящий момент Tsa.
Следует отметить, что вычисление стабилизирующего крутящего момента Tsa не ограничивается его вычислением на основе разности ΔT движущих сил правых и левых колес, и это вычисление может быть выполнено на основе разности тормозных сил правых и левых колес аналогично разности ΔT движущих сил правых и левых колес. Помимо этого вычисление стабилизирующего крутящего момента Ts может быть выполнено таким образом, что устанавливаются датчик скорости относительно вертикальной оси, определяющий скорость y относительно вертикальной оси транспортного средства, и датчик поперечного ускорения, определяющий поперечное ускорение Gy транспортного средства, и поперечная сила Fy вычисляется на основе дифференциального значения скорости относительно вертикальной оси и поперечного ускорения Gy из уравнения движения транспортного средства, и стабилизирующий крутящий момент Ts затем вычисляется посредством умножения этой поперечной силы Fy на увод εn пневматической шины. Кроме того, стабилизирующий крутящий момент Tsa также может быть вычислен на основе угла θs поворота при рулении датчика AS угла поворота при рулении и скорости V транспортного средства посредством фактического измерения или обращения к карте управления, вычисленной через моделирование с использованием взаимосвязи между углом θs поворота при рулении руля SW и стабилизирующим крутящим моментом Tsa со скоростью V транспортного средства в качестве параметра.
Затем значение Isa* команды управления целевым током для обеспечения способности к прямолинейному движению, вычисленное посредством секции SG обеспечения способности к прямолинейному движению, подается в сумматор AD, описанный выше. Этот сумматор AD суммирует значение Isa* команды управления целевым током для обеспечения способности к прямолинейному движению со значением I* команды управления целевым вспомогательным крутящим моментом, вычисленным посредством секции TO вычисления значений команд управления током целевого вспомогательного крутящего момента, чтобы вычислять значение Ia* команды управления целевым током актуатора, и вычисленное значение Ia* команды управления целевым током актуатора в модуль SB вычитания.
Следовательно, секция PC управления усилителем рулевого управления системы CT управления рулением суммирует значение Isa* команды управления целевым током для обеспечения способности к прямолинейному движению, вычисленное посредством секции SG обеспечения способности к прямолинейному движению, со значением It* команды управления током целевого вспомогательного крутящего момента, вычисленным в соответствии с крутящим моментом Ts поворота при рулении, введенным в руль SW, и скоростью V транспортного средства, чтобы вычислять значение Ia* команды управления целевым током актуатора.
Электрический актуатор EA управляется на основе этого значения Ia* команды управления целевым током актуатора. Следовательно, электрический актуатор EA приводит к формированию крутящего момента поворота при рулении, обеспечивающего способность к прямолинейному движению узла 1B подвески, в дополнение к вспомогательному крутящему моменту поворота при рулении в соответствии с силой поворота при рулении, передаваемой на руль SW, и передает эти крутящие моменты на поворотную рулевую ось SSo на выходной стороне.
Помимо этого в вышеописанном варианте осуществления угол продольного наклона поворотного шкворня узла 1B подвески задается равным нулю. Взаимосвязь между углом продольного наклона поворотного шкворня, характеристикой отклика при рулении и стабильностью (руления) является такой, что, как показано на Фиг.13(a), когда угол продольного наклона поворотного шкворня является нулевым, демонстрируется характеристика быстрого отклика при рулении, но не может обеспечиваться стабильность (руления). Другими словами, присутствует компромиссное соотношение между характеристикой отклика при рулении и стабильностью относительно угла продольного наклона поворотного шкворня.
С другой стороны, взаимосвязь между позицией точки контакта с поверхностью дороги оси KS поворотного шкворня, допустимым запасом уменьшения поперечной силы и способностью к прямолинейному движению является такой, как показано на Фиг.13(b). Другими словами, в состоянии, в котором контактная точка оси KS поворотного шкворня размещается в центре области контакта шины с поверхностью дороги, допустимый запас уменьшения поперечной силы, как обозначено посредством сплошной линии по Фиг.13(b), становится максимальным. Тем не менее, способность к прямолинейному движению не обеспечивается, как обозначено посредством пунктирной линии по Фиг.13(b). Затем, когда контактная точка оси KS поворотного шкворня перемещается в прямом направлении от центра области контакта шины с поверхностью дороги, допустимый запас уменьшения поперечной силы постепенно уменьшается и способность к прямолинейному движению постепенно улучшается по мере того, как точка (соприкосновения) контакта с землей оси KS поворотного шкворня становится отделенной от центра области контакта шины с поверхностью дороги.
После этого, когда контактная точка оси KS поворотного шкворня достигает переднего конца области контакта шины с поверхностью дороги для шины, допустимый запас уменьшения поперечной силы снижается приблизительно до половины его максимального значения, но, напротив, способность к прямолинейному движению становится предпочтительным состоянием. Кроме того, когда точка (соприкосновения) контакта с землей оси KS поворотного шкворня перемещается к передней стороне, превышающей передний край области контакта с землей шины, допустимый запас уменьшения поперечной силы дополнительно снижается от приблизительно половины максимального значения, но способность к прямолинейному движению становится еще более предпочтительной.
В вышеописанном варианте осуществления, чтобы увеличивать допустимый запас уменьшения поперечной силы, ось KS поворотного шкворня задается таким образом, что она проходит в области контакта шины с поверхностью дороги в состоянии, в котором руль SW находится в нейтральной позиции. Следовательно, уменьшается способность к прямолинейному движению узла 1B подвески. Это уменьшение способности к прямолинейному движению может быть дополнено посредством управления для электрического актуатора EA с использованием секции SG обеспечения способности к прямолинейному движению. Таким образом, в вышеописанном первом варианте осуществления секция SG обеспечения способности к прямолинейному движению служит для того, чтобы компенсировать уменьшение способности к прямолинейному движению в узле 1B подвески, так что может обеспечиваться достаточная способность к прямолинейному движению.
Работа
Далее поясняется работа узла 1B подвески в первом варианте осуществления.
В узле 1B подвески в этом варианте осуществления плечо стабилизации задается таким образом, что оно находится в области контакта шины с поверхностью дороги.
Например, задание оси поворотного шкворня является таким, что задаются угол продольного наклона поворотного шкворня в 0 градусов, плечо стабилизации в 0 мм и положительное плечо обкатки колеса радиуса плеча обкатки колеса в 0 мм или более.
Помимо этого угол поперечного наклона поворотного шкворня задается равным значению в диапазоне меньшего угла (например, 15 градусов или менее), в котором радиус плеча обкатки колеса может задаваться таким образом, что он предоставляет положительное плечо обкатки колеса.
Вышеописанная геометрия подвески приспосабливается в этом варианте осуществления. Следовательно, становится меньшим варьирование траектории центра области контакта шины с поверхностью дороги, и, таким образом, может быть уменьшен крутильный крутящий момент шины. Следовательно, может быть задана меньшей осевая сила зубчатой рейки, так что может быть задан меньшим момент вокруг оси KS поворотного шкворня, и может быть уменьшен вывод актуатора 8 рулевого управления. Помимо этого, меньшая сила может управлять направлением (ориентацией) ходовых колес. Другими словами, может достигаться повышение маневренности и стабильности. Соответственно, могут быть уменьшены площади поперечного сечения соответствующих элементов тяг, составляющих узел 1B подвески и ось зубчатой рейки, и может быть облегчен сам узел 1B подвески. Таким образом, соответственно, транспортное средство 1 может быть более легким.
Помимо этого, поскольку угол продольного наклона поворотного шкворня задается равным 0 градусов и плечо стабилизации задается равным 0 мм, существует возможность возникновения влияния конструкции подвески на способность к прямолинейному движению. Тем не менее, поскольку радиус плеча обкатки колеса задается как положительное плечо обкатки колеса, уменьшается его влияние.
Кроме того, управление дополнением способности к прямолинейному движению на основе стабилизирующего крутящего момента Tsa посредством секции SG обеспечения способности к прямолинейному движению способствует обеспечению способности к прямолинейному движению узла 1B подвески. Следовательно, могут быть повышены маневренность и стабильность транспортного средства.
Помимо этого, поскольку угол поперечного наклона поворотного шкворня ограничивается в постоянном диапазоне, руление электрического актуатора EA выполняется таким образом, что может не допускаться такая ситуация, в которой у водителя транспортного средства возникает ощущение веса (нагрузки) при операции руления. Затем, поскольку электрический актуатор EA может противостоять внешней силе, когда прикладывается внешняя сила к транспортному средству 1 вследствие отдачи внешней силы от поверхности дороги, может не допускаться влияние на водителя транспортного средства. Другими словами, может достигаться повышение маневренности и стабильности.
Помимо этого, поскольку узел 1B подвески в этом варианте осуществления имеет стоечный тип, еще более может сокращаться число деталей и может быть упрощено задание оси KS поворотного шкворня в этом варианте осуществления.
Как описано выше, согласно узлу 1B подвески в этом варианте осуществления ось поворотного шкворня задается таким образом, что она проходит в области контакта шины с поверхностью дороги в состоянии, в котором руль размещается в нейтральной позиции. Следовательно, может быть задан меньшим момент вокруг оси поворотного шкворня.
Следовательно, поскольку в вышеописанном первом варианте осуществления руление может быть выполнено за счет меньшей осевой силы зубчатой рейки и направление ходовых колес может управляться за счет меньшей силы, могут быть повышены маневренность и стабильность транспортного средства, при том что достигается легковесность узла подвески. Следует отметить, что в этом варианте осуществления, первая тяга 37, вторая тяга 38, амортизатор 40 соответствуют множеству элементов тяг. Первая тяга 37 и вторая тяга 38 соответствуют нижним рычагам. Пружинные элементы 34, 34 и амортизаторы 40, 40 соответствуют элементам стойки.
Преимущество первого варианта осуществления
(1) Ось поворотного шкворня задается таким образом, что она проходит в области контакта с поверхностью дороги (пятне контакта) шины в состоянии, в котором руль размещается в нейтральной позиции. Таким образом, может быть задан меньшим момент вокруг оси поворотного шкворня, так что руление может быть выполнено за счет меньшей осевой силы зубчатой рейки и направление ходовых колес может управляться за счет меньшей силы.
Следовательно, в этом варианте осуществления могут быть повышены маневренность и стабильность транспортного средства, при том что достигается легковесность узла подвески.
(1)' Плечо стабилизации оси поворотного шкворня находится в области контакта шины с поверхностью дороги.
Таким образом, может быть задан меньшим момент вокруг оси поворотного шкворня. Следовательно, руление может быть выполнено за счет меньшей осевой силы зубчатой рейки и направление (ориентация) ходовых колес может управляться за счет меньшей силы.
Следовательно, при том что достигается легковесность узла подвески, могут быть повышены маневренность и стабильность.
(1)" Ось поворотного шкворня задается таким образом, что она проходит через окрестность центра области контакта шины с поверхностью дороги в области контакта шины с поверхностью дороги.
Это способствует минимизации момента вокруг оси поворотного шкворня. Таким образом, руление может быть выполнено за счет меньшей осевой силы зубчатой рейки и направление ходовых колес может управляться за счет меньшей силы.
Следовательно, в этом варианте осуществления, при том что достигается легковесность узла подвески, могут быть повышены маневренность и стабильность.
(2) Секция обеспечения способности к прямолинейному движению предоставляется в системе управления рулением, причем эта секция обеспечения способности к прямолинейному движению обеспечивает способность к прямолинейному движению узла автомобильной подвески.
Следовательно, например, с использованием электрического актуатора в электрически управляемой системе усилителя рулевого управления может быть выполнено управление для обеспечения способности к прямолинейному движению, соответствующее заданию оси поворотного шкворня согласно настоящему изобретению.
Таким образом, в этом варианте осуществления, при том что достигается легковесность узла подвески, также могут быть повышены маневренность и стабильность.
(2)' Секция обеспечения способности к прямолинейному движению обеспечивает способность к прямолинейному движению посредством оценки стабилизирующего крутящего момента.
Следовательно, секция обеспечения способности к прямолинейному движению обеспечивает характеристику быстрого отклика самого узла подвески, так что может обеспечиваться уменьшенная способность к прямолинейному движению посредством стабилизирующего крутящего момента и могут быть повышены маневренность и стабильность.
(3) Узел автомобильной подвески согласно настоящему изобретению является применимым к стоечному (тип) механизму подвески.
Следовательно, может сокращаться число деталей, составляющих подвеску и может быть упрощено задание оси поворотного шкворня.
(4) Этот вариант осуществления включает в себя способ регулирования геометрии узла автомобильной подвески, в котором точка контакта с поверхностью дороги оси KS поворотного шкворня задается так, что она находится в области контакта шины с поверхностью дороги в состоянии, в котором руль находится в нейтральной позиции.
Таким образом, может быть задан меньшим момент вокруг оси KS поворотного шкворня. Таким образом, руление может быть выполнено за счет меньшей осевой силы зубчатой рейки и направление ходовых колес может управляться за счет меньшей силы.
Следовательно, в этом варианте осуществления, при том что достигается легковесность узла подвески, могут быть повышены маневренность и стабильность транспортного средства.
Альтернатива 1
В первом варианте осуществления ось KS поворотного шкворня задается таким образом, что она проходит в области контакта шины с поверхностью дороги в состоянии, в котором руль находится в нейтральной позиции, и плечо стабилизации задается в области контакта шины, в качестве одного примера задания плеча стабилизации плечо стабилизации получает значение, близкое к нулю.
С другой стороны, в альтернативе 1 ось KS поворотного шкворня ограниченно задается таким образом, что она проходит через диапазон от центра области контакта (с поверхностью дороги) шины к переднему краю области контакта шины в состоянии, в котором руль находится в нейтральной позиции. Помимо этого условие задания плеча стабилизации ограничивается диапазоном от центра области контакта шины до переднего края области контакта шины.
Преимущество
В состоянии, в котором руль находится в нейтральной позиции, ось поворотного шкворня задается таким образом, что она проходит через диапазон от центра области контакта шины до переднего края области контакта шины и плечо стабилизации задается равным расстоянию от центра области контакта шины до переднего края области контакта шины. Следовательно, обеспечение способности к прямолинейному движению и уменьшение веса (нагрузки) при операции руления становятся совместимыми. Другими словами, в вышеописанной конструкции, при том что достигается легковесность узла подвески, могут быть повышены маневренность и стабильность.
Альтернатива 2
В первом варианте осуществления область, обведенная посредством штрихпунктирной линии, иллюстрируется в качестве области, подходящей для задания в координатной плоскости, показанной на Фиг.7. Принимая во внимание, что при рассмотрении одной из изолиний осевой силы зубчатой рейки в качестве граничной линии внутренняя сторона области относительно диапазона, указываемого посредством этой граничной линии (в направлении снижения угла поперечного наклона поворотного шкворня и в направлении увеличения радиуса плеча обкатки колеса), может предоставлять область, подходящую для задания.
Преимущество
При предполагаемом максимальном значении осевой силы зубчатой рейки геометрия подвески может задаваться в диапазоне, равном или меньшем максимального значения.
Модификации
Следует отметить, что в первом варианте осуществления, описанном выше, система CT управления рулением состоит из секции PC управления усилителем рулевого управления и секции SG обеспечения способности к прямолинейному движению. Тем не менее, настоящее изобретение не ограничено этой конструкцией.
В качестве CS системы управления рулением может быть установлена только секция SG обеспечения способности к прямолинейному движению при исключении секции PC управления усилителем рулевого управления. В этом случае (модификации) в конструкции, показанной на Фиг.11, исключаются секция TO вычисления значений команд управления током целевого вспомогательного крутящего момента и сумматор AD, так что значение Isa* команды управления целевым током для обеспечения способности к прямолинейному движению, выведенное из секции SG обеспечения способности к прямолинейному движению, может непосредственно вводиться в модуль SB вычитания.
Помимо этого в вышеописанном первом варианте осуществления значение Isa* команды управления целевым током для обеспечения способности к прямолинейному движению вычисляется на основе стабилизирующего крутящего момента Tsa в секции SG обеспечения способности к прямолинейному движению. Тем не менее, настоящее изобретение не ограничено этим. Например, может задаваться фиксированное значение, представленное посредством среднего значения стабилизирующего крутящего момента Tsa.
Второй предпочтительный вариант осуществления изобретения
Далее описывается второй предпочтительный вариант осуществления согласно настоящему изобретению ниже со ссылкой на Фиг.14-19.
Во втором варианте осуществления подробнее приводится конструкция узла 1B подвески и настоящее изобретение является применимым к многорычажной подвеске.
Другими словами, во втором варианте осуществления для простоты пояснения поясняется конкретная конструкция управляемого колеса 17FL с левой стороны из правого и левого управляемых колес 17FL, 17FR.
Управляемое ходовое колесо 17FL поддерживается с возможностью вращения посредством элемента 81 оси, как показано на Фиг.14-17. Этот элемент 81 оси имеет верхнюю концевую секцию, крепящуюся к наружной огибающей амортизатора 83, составляющего стойку 82, и нижнюю концевую секцию, сцепленную с нижним рычагом 84, состоящим из A-образного рычага, через шаровой шарнир 85. Затем элемент 81 оси имеет центральную секцию в вертикальном направлении, через которую вставляется с возможностью поддержки полуось 86, причем управляемое ходовое колесо 17FL крепится к этой полуоси 86.
Стойка 82 соединяется с опорной секцией стороны кузова транспортного средства в верхней точке P1 поворота верхней концевой секции стойки 82 аналогично вышеописанному первому варианту осуществления.
Нижний рычаг 84, как показано на Фиг.18, составляет A-образный рычаг, и секция 84a отверстия формируется на нижнем рычаге 84 в задней стороне транспортного средства от его центральной секции, чтобы достигать легковесности. Это делает нижний рычаг 84 гибкой конструкцией в прямом или обратном направлении транспортного средства и жесткой конструкцией в направлении ширины транспортного средства.
Затем две части стороны базовой секции нижнего рычага 84, разнесенные друг от друга в прямом или обратном направлении транспортного средства, крепятся к секции 91 прикрепления рычага подрамника 90, показанного на Фиг.19, через эластичные втулки 97a, 87b.
Помимо этого поперечная рулевая тяга 15, проходящая через заднюю сторону стойки 82, соединяется в задней стороне транспортного средства с элементом 81 оси, и другой конец поперечной рулевой тяги 15 соединяется с осью 14 зубчатой рейки.
Помимо этого один конец стабилизатора 92, центральная секция которого поворотно поддерживается на элементе на стороне кузова транспортного средства, прикреплен к нижней торцевой стороне наружной огибающей стойки 82.
Затем задаются угол наклона оси KS поворотного шкворня, соединяющей верхнюю точку P1 поворота, находящуюся в верхней концевой секции стойки 82 узла 1B подвески, и нижнюю точку P2 поворота нижнего рычага 84, поддерживающего элемент 81 оси, угол продольного наклона поворотного шкворня, плечо стабилизации, радиус плеча обкатки колеса, смещение поворотного шкворня и т.д. аналогично тому, как описано в первом варианте осуществления.
Следовательно, во втором варианте осуществления работа и преимущество, идентичные первому варианту осуществления, описанному выше, могут быть получены посредством узла 1B подвески. Помимо этого во втором варианте осуществления поперечная сила, действующая на центр области контакта шины (точку приложения силы), может быть задана небольшой, как описано в первом варианте осуществления. Следовательно, может быть задана небольшой сила, приложенная к нижнему рычагу. Следовательно, может быть уменьшена жесткость нижнего рычага, и может достигаться легковесность узла подвески.
Модификация узла подвески
Следует отметить, что узел 1B подвески не ограничен конструкцией каждого из первого и второго вариантов осуществления. В качестве узла подвески может применяться конструкция подвески, показанная на Фиг.20(a)-20(c). Другими словами, в этом узле подвески кронштейн 104, прикрепленный к нижней концевой секции амортизатора 103, составляющей стойку 102, крепится к верхнему концу элемента 101 оси, к которому прикрепляется ступица 100, причем ступица 100 поддерживает каждое из управляемых колес 17FL и 17FR. Помимо этого секция прикрепления на внешней стороне кузова транспортного средства нижнего рычага 105, имеющего конструкцию рычага в виде деформированной A, крепится через шаровой шарнир 106.
Помимо этого нижний рычаг 105 имеет внутреннюю сторону относительно транспортного средства (в транспортном средстве), ответвленную в переднюю секцию 105a рычага и в заднюю секцию 105b рычага. Передняя секция 105a рычага поворотно поддерживается на элементе на стороне кузова транспортного средства через эластичную втулку 107a, как показано на Фиг.20(a), в вертикальной плоскости в направлении ширины транспортного средства. Задняя секция 105b рычага поддерживается на элементе на стороне кузова транспортного средства через эластичную втулку 107b, центральная ось которой расположена в вертикальном направлении транспортного средства, как показано на Фиг.20(a). Кроме того, ось 109 зубчатой рейки соединяется с задней стороной (относительно транспортного средства) элемента 101 оси через поперечную рулевую тягу 108.
В этой конструкции задаются угол наклона оси KS поворотного шкворня, соединяющей верхнюю точку P1 поворота, находящуюся в верхнем конце стойки 102, и нижнюю точку P2 поворота, которая является точкой сцепления элемента 101 оси с нижним рычагом 105, угол продольного наклона поворотного шкворня, плечо стабилизации, радиус плеча обкатки колеса, смещение поворотного шкворня и т.д. аналогично первому варианту осуществления, описанному выше, так что могут получаться идентичная работа и преимущество. Помимо этого, поскольку узел подвески имеет такую конструкцию, как показано на Фиг.20(a), 20(b) и 20(c), может еще больше упрощаться узел подвески и могут достигаться меньшие затраты на узел подвески.
Третий вариант осуществления изобретения
Далее описывается третий предпочтительный вариант осуществления согласно настоящему изобретению со ссылкой на Фиг.21-26.
В третьем варианте осуществления настоящее изобретение является применимым к системе управления по проводам в качестве системы рулевого управления и может более точно обеспечиваться способность к прямолинейному движению узла подвески.
Другими словами, как показано на Фиг.21, автомобильное транспортное средство 1 включает в себя кузов 1A транспортного средства и систему SBW управления по проводам. Система SBW управления по проводам включает в себя: руль 2; поворотную рулевую ось 3 на входной стороне; датчик 4 угла поворота при рулении; датчик 5 крутящего момента поворота при рулении; актуатор 6 силы реакции при рулении; датчик 7 угла поворота актуатора силы реакции при рулении; актуатор 8 рулевого управления; датчик 9 угла поворота актуатора рулевого управления; поворотную рулевую ось 10 на выходной стороне; датчик 11 крутящего момента поворота при рулении; ведущую шестерню 12; датчик 13 угла поворота ведущей шестерни; ось 14 зубчатой рейки; поперечную рулевую тягу 15; датчик 16 осевой силы поперечных рулевых тяг; ходовые колеса 17FR, 17FL, 17RR, 17RL; секцию 21 получения параметров состояния транспортного средства; датчики 24FR, 24FL, 24RR, 24RL скорости ходовых колес; модуль 26 схемы управления/приведения в действие и механическое дублирующее средство 27.
Руль 2 сконструирован с возможностью вращаться неразъемно с поворотной рулевой осью 3 на входной стороне, и ввод при рулении водителем транспортного средства передается на поворотную рулевую ось 3 на входной стороне. Поворотная рулевая ось 3 на входной стороне включает в себя актуатор 6 силы реакции при рулении. Сила реакции при рулении посредством актуатора 6 силы реакции при рулении прикладывается к вводу руления, введенному из руля 2.
Датчик 4 угла поворота при рулении прикрепляется к поворотной рулевой оси 3 на входной стороне и определяет угол поворота (вращения) поворотной рулевой оси 3 на входной стороне, а именно угол θs поворота при рулении, введенный в руль 2 водителем транспортного средства. Затем датчик 4 угла поворота при рулении выводит угол θs поворота при рулении, введенный в руль 2 водителем, в модуль 26 схемы управления/приведения в действие. Затем датчик 4 угла поворота при рулении выводит угол θs поворота при рулении поворотной рулевой оси 3 на входной стороне в модуль 26 схемы управления/приведения в действие.
Датчик 5 крутящего момента поворота при рулении прикрепляется к поворотной рулевой оси 3 на входной стороне и определяет крутящий момент при вращении (а именно входной крутящий момент поворота при рулении в руль 2). Затем датчик 5 крутящего момента поворота при рулении выводит определенный крутящий момент при движении поворотной рулевой оси 3 на входной стороне в модуль 26 схемы управления/приведения в действие.
Актуатор 6 силы реакции при рулении имеет шестерню, вращающуюся неразъемно с валом электромотора, который зацепляется с шестерней, сформированной со стороны поворотной рулевой оси 3 на входной стороне, и предоставляет силу реакции против вращения поворотной рулевой оси 3 на входной стороне посредством руля 2 в соответствии с командой модуля 26 схемы управления/приведения в действие. Датчик 7 угла поворота актуатора силы реакции при рулении определяет угол вращения актуатора 6 силы реакции (а именно, угол вращения согласно вводу руления, передаваемому в актуатор 6 силы реакции при рулении) и выводит определенный угол вращения в модуль 26 схемы управления/приведения в действие.
Актуатор 8 рулевого управления имеет шестерню, неразъемно вращающуюся с валом электромотора, которая зацепляется с шестерней, сформированной со стороны поворотной рулевой оси 10 на выходной стороне, и вращает поворотную рулевую ось 10 на выходной стороне в соответствии с командой модуля 26 схемы управления/приведения в действие.
Датчик 9 угла вращения актуатора рулевого управления определяет угол вращения актуатора 8 рулевого управления (а именно, угол вращения для руления, выведенный посредством актуатора 8 рулевого управления) и выводит определенный угол вращения в модуль 26 схемы управления/приведения в действие.
Поворотная рулевая ось 10 на выходной стороне включает в себя актуатор 8 рулевого управления, и вращение, введенное посредством актуатора 8 рулевого управления, передается на ведущую шестерню 12. Датчик 11 крутящего момента поворота при рулении устанавливается на поворотной рулевой оси 10 на выходной стороне и определяет крутящий момент вращения (при движении) поворотной рулевой оси 10 на выходной стороне (а именно, крутящий момент поворота при рулении для каждого из ходовых колес 17FR, 17FL через ось 14 зубчатой рейки). Датчик 11 крутящего момента поворота при рулении выводит определенный крутящий момент (вращения) при движении поворотной рулевой оси 10 на выходной стороне в модуль 26 схемы управления/приведения в действие.
Ведущая шестерня 12 зацепляется с осью 14 зубчатой рейки и передает введенное вращение из поворотной рулевой оси 10 на выходной стороне на ось 14 зубчатой рейки.
Датчик 13 угла поворота ведущей шестерни определяет угол вращения ведущей шестерни 12 (а именно, угол поворота при рулении ходовых колес 177FR, 17FL, выведенный через ось 14 зубчатой рейки) и выводит угол вращения ведущей шестерни 12 в модуль 26 схемы управления/приведения в действие.
Ось 14 зубчатой рейки содержит прямозубую шестерню, которая должна зацепляться с ведущей шестерней 12, и преобразует вращение ведущей шестерни 12 в прямолинейное движение в направлении ширины транспортного средства.
Поперечные рулевые тяги 15, 15 соответственно соединяются между обеими концевыми секциями оси 14 зубчатой рейки и рычагами поворотных кулаков ходовых колес 17FR, 17FL через шаровые шарниры. Датчики 16, 16 осевой силы поперечных рулевых тяг выводят определенные осевые силы поперечных рулевых тяг 15 в модуль 26 схемы управления/приведения в действие.
Ходовые колеса 17FR, 17FL, 17RR, 17RL состоят из шин, прикрепленных к колесным дискам, и располагаются на кузове 1A транспортного средства через узел 1B подвески. Из этих ходовых колес передние ходовые колеса (ходовые колеса 17FR, 17FL) конструктивно исполнены так, что соответствующие рычаги поворотных кулаков качаются за счет соответствующих поперечных рулевых тяг, чтобы изменять направление (ориентацию) ходовых колес 17FR, 17FL относительно кузова 1A транспортного средства.
Секция 21 получения параметров состояния транспортного средства получает скорость транспортного средства на основе импульсных сигналов, представляющих скорости вращения соответствующих ходовых колес, выводимые из датчиков 24FR, 24FL, 24RR, 24RL скорости ходовых колес. Помимо этого секция 21 получения параметров состояния транспортного средства получает степени проскальзывания соответствующих ходовых колес на основе скорости транспортного средства и скоростей вращения соответствующих ходовых колес. Затем секция 21 получения параметров состояния транспортного средства выводит полученные параметры в модуль 26 схемы управления/приведения в действие.
Датчики 24FR, 24FL, 24RR, 24RL скорости ходовых колес выводят импульсные сигналы, представляющие скорости вращения соответствующих ходовых колес, в секцию 21 получения параметров состояния транспортного средства и модуль 26 схемы управления/приведения в действие.
Модуль 26 схемы управления/приведения в действие полностью управляет автомобильным транспортным средством 1 и выводит каждый из различных видов управляющих сигналов, связанных с силой реакции при рулении поворотной рулевой оси 3 на входной стороне, углом поворота передних ходовых колес или сцеплением механического дублирующего средства 27, в актуатор 6 силы реакции при рулении, в актуатор 8 рулевого управления или механическое дублирующее средство 27.
Помимо этого модуль 26 схемы управления/приведения в действие преобразует определенное значение посредством каждого датчика в значение в соответствии с целью использования. Например, модуль 26 схемы управления/приведения в действие преобразует угол вращения, определенный посредством датчика 7 угла поворота актуатора силы реакции при рулении, во входной угол поворота при рулении, преобразует угол вращения, определенный посредством датчика 9 угла поворота актуатора силы реакции при рулении, в угол поворота при рулении ходовых колес и преобразует угол вращения ведущей шестерни 12, определенный посредством датчика 13 угла поворота ведущей шестерни, в угол поворота при рулении ходовых колес.
Следует отметить, что модуль 26 схемы управления/приведения в действие отслеживает угол поворота при рулении поворотной рулевой оси 3 на входной стороне, определенный посредством датчика 4 угла поворота при рулении, угол вращения актуатора 6 силы реакции при рулении, определенный посредством датчика 7 угла поворота актуатора силы реакции при рулении, угол вращения актуатора 8 рулевого управления, определенный посредством датчика 9 угла поворота актуатора рулевого управления, и угол вращения ведущей шестерни 12, определенный посредством датчика 9 угла поворота ведущей шестерни, и может определять возникновение повреждения в системе рулевого управления на основе этих взаимосвязей. Затем, когда определяется возникновение повреждения в этой системе рулевого управления, модуль 26 схемы управления/приведения в действие выводит сигнал команды управления, чтобы обеспечивать сцепление между поворотной рулевой осью 3 на входной стороне и поворотной рулевой осью 10 на выходной стороне, в механическое дублирующее средство 27.
Механическое дублирующее средство 27 является механизмом, сцепляющимся между поворотной рулевой осью 3 на входной стороне и поворотной рулевой осью 10 на выходной стороне в соответствии с командой, выданной из модуля 26 схемы управления/приведения в действие, и обеспечивающим передачу силы из поворотной рулевой оси 3 на входной стороне на поворотную рулевую ось 10 на выходной стороне. Следует отметить, что в ходе нормального состояния модуль 26 схемы управления/приведения в действие командует такое состояние, в котором поворотная рулевая ось 3 на входной стороне не сцеплена с поворотной рулевой осью 10 на выходной стороне, в механическое дублирующее средство 27. Затем, в случае если появляется необходимость выполнять операцию руления без вмешательства датчика 4 угла поворота при рулении, датчика 5 крутящего момента поворота при рулении, актуатора 8 рулевого управления и т.д. вследствие возникновения повреждения в системе рулевого управления, команда, чтобы сцеплять поворотную рулевую ось 3 на входной стороне к поворотной рулевой оси 10 на выходной стороне, вводится в механическое дублирующее средство 27.
Следует отметить, что механическое дублирующее средство 27 может состоять, например, из механизма рулевого управления кабельного типа и т.п.
Также следует отметить, что модуль 26 схемы управления/приведения в действие, как описано выше, вводит крутящий момент Ts поворота при рулении поворотной рулевой оси 3 на входной стороне, определенный посредством датчика 5 крутящего момента поворота при рулении, скорость V транспортного средства, полученную в секции 21 получения параметров состояния транспортного средства, угол θmi вращения актуатора 6 силы реакции при рулении, определенный посредством датчика 9 угла вращения актуатора рулевого управления, и угол θmo вращения актуатора 8 рулевого управления, определенный посредством датчика 9 угла вращения актуатора рулевого управления. Кроме того, модуль 26 схемы управления/приведения в действие принимает импульсные сигналы, представляющие скорости вращения соответствующих ходовых колес, определенные посредством датчиков 24FR, 24FL, 24RR, 24RL скорости ходовых колес.
Этот модуль 26 схемы управления/приведения в действие включает в себя систему 50 управления рулением, показанную на Фиг.22. Эта система 50 управления рулением включает в себя: секцию 51 вычисления целевого угла поворота при рулении; секцию 52 управления углом поворота при рулении; секцию 53 дополнения способности к прямолинейному движению; секцию 54 компенсации внешних возмущений; секцию 56 управления задержкой; секцию 58 вычисления отклонения угла поворота при рулении; секцию 59 управления электромотором рулевого управления; секцию 60 вычисления отклонения тока и секцию 62 управления током электромотора.
Секция 51 вычисления целевого угла поворота при рулении вводит угол θs поворота при рулении, определенный посредством датчика 4 угла поворота при рулении, и скорость V транспортного средства и вычисляет целевой угол δ* поворота при рулении на основе этих данных.
Секция 52 управления углом поворота при рулении вычисляет величины Δfl, Δfr варьирования углов поворота при рулении управляемых колес 17FL, 17FR вследствие подруливания за счет податливости. Эти величины Δfl, Δfl варьирования вычисляются посредством выполнения вычислений, изложенных в уравнении (1) и уравнении (2), на основе движущих сил TL, TR левых и правых ходовых колес, выведенных из системы 71 управления движущей силой, которая распределяет и управляет движущими силами управляемых левых и правых ходовых колес 17FL, 17FR, которые являются левыми и правыми ведущими колесами транспортного средства, и коэффициента af подруливания за счет податливости в соответствии с прогибами втулок нижних тяг 37, 38. Затем секция 52 управления углом поворота при рулении вычисляет разность смещений вычисленных величин Δfl, Δfr варьирования и вычисляет значение Ac управления подруливанием за счет податливости в качестве значения Ac управления углом поворота при рулении (=Δfl-Δfr).
Δfl=af*TL... (1)
Δfr=af*TR... (2)
Секция 53 дополнения способности к прямолинейному движению вводит движущие силы TL, TR левых и правых ходовых колес, выведенные из системы 71 управления движущей силой, которая распределяет и управляет движущими силами ведущего колеса, аналогично секции SG обеспечения способности к прямолинейному движению в первом варианте осуществления, описанной выше, входной крутящий момент Ts поворота при рулении, определенный посредством датчика 5 крутящего момента поворота при рулении, вычисляет стабилизирующий крутящий момент Tsa на основе этих данных и вычисляет значение Asa управления стабилизирующим крутящим моментом (=Ksa*Tsa) в качестве команды управления целью для обеспечения способности к прямолинейному движению посредством умножения вычисленного стабилизирующего крутящего момента Tsa на предварительно определенное корректирующее усиление Ksa угла поворота при рулении.
Секция 54 компенсации внешних возмущений вводит крутящий момент Ts поворота при рулении из датчика 5 крутящего момента поворота при рулении, угол θmo вращения из датчика 9 угла вращения актуатора рулевого управления и ток imr электромотора из секции 61 определения тока электромотора, отделяет внешние возмущения, введенные в транспортное средство, для каждой из полос частот, чтобы оценивать соответствующие внешние возмущения, и вычисляет значение Adis компенсации внешних возмущений, чтобы подавлять эти внешние возмущения.
Эта секция 54 компенсации внешних возмущений включает в себя множество секций оценки внешних возмущений, каждая из которых в модели с крутящим моментом Ts поворота при рулении, который является вводом руления от водителя и вводом руления посредством актуатора 8 рулевого управления в качестве ввода управляющего сигнала, и с переменной фактического состояния руления в качестве регулируемой переменной, оценивает отдельные внешние возмущения на основе разности между значением ввода управляющего сигнала, когда ввод управляющего сигнала пропускается через фильтр нижних частот, и значением регулируемой переменной, пропускаемым через обратную характеристику модельной секции 54 компенсации внешних возмущений, описывается в первой публикации заявки на патент Японии (tokkai) № 2007-237840. Соответствующие секции оценки внешних возмущений отделяют внешние возмущения друг от друга для каждой из множества полос частот посредством задания частот отсечки фильтров нижних частот в секциях оценки внешних возмущений отличающимися.
Затем сумматор 55a суммирует между собой значение Adis дополнения внешних возмущений, вычисленное посредством секции 54 компенсации внешних возмущений, и значение Asa управления стабилизирующим крутящим моментом, вычисленное посредством секции 53 дополнения способности к прямолинейному движению. Вывод по суммированию сумматора 55a и значение Ac управления подруливанием за счет податливости, вычисленное посредством секции 55b управления углом поворота при рулении, суммируются в сумматоре 55b, чтобы вычислять значение δa управления для обеспечения способности к прямолинейному движению. Это значение δa управления для обеспечения способности к прямолинейному движению подается в секцию 56 управления задержкой.
Следует отметить, что, как показано на Фиг.22, секция SG обеспечения способности к прямолинейному движению состоит из секции 52 управления углом поворота при рулении, секции 53 дополнения способности к прямолинейному движению, секции 54 компенсации внешних возмущений и сумматоров 55a, 55b. Эта секция SG обеспечения способности к прямолинейному движению и секция 56 управления задержкой, как описано ниже, составляют секцию SRS задания характеристики отклика при рулении.
Секция 56 управления задержкой, как показано на Фиг.22, включает в себя: секцию 56a определения начала руления; моностабильную схему 56b; секцию 56c регулировки усиления; и умножитель 56d.
Секция 56a определения начала руления определяет время руления влево или руления вправо в состоянии, в котором нейтральная позиция поддерживается на основе угла θs поворота при рулении, определенного посредством датчика 4 угла поворота при рулении, и выводит сигнал SS начала руления, представляющий начало руления из нейтрального состояния, в моностабильную схему 56b. Помимо этого моностабильная схема 56b выводит сигнал задержки начала управления, который находится в активном состоянии для предварительно определенного времени задержки, например 0,1 секунды, на основе сигнала начала руления, выведенного из секции 56a определения начала руления, в секцию 56c регулировки усиления.
Секция 56c регулировки усиления задает усиление Ga контура управления равным "0", когда сигнал задержки начала управления находится в активном состоянии, и задает усиление Ga контура управления равным "1", когда сигнал задержки начала управления находится в неактивном состоянии. Секция 56c регулировки усиления выводит заданное усиление Ga контура управления в умножитель 56d. Умножитель 56d вводит значение δa управления для обеспечения способности к прямолинейному движению, выведенное из секции SG обеспечения способности к прямолинейному движению, умножает это значение δa управления для обеспечения способности к прямолинейному движению на усиление Ga контура управления и выводит умноженный результат в сумматор 56e, в который вводится целевой угол δ* поворота при рулении из секции 51 вычисления целевого угла поворота при рулении.
Следовательно, секция 56c регулировки усиления секции 56 управления задержкой задает усиление Ga контура управления, которое должно быть умножено на значение δa управления для обеспечения способности к прямолинейному движению, равным "0", так что значение δa управления для обеспечения способности к прямолинейному движению, вычисленное посредством секции SG обеспечения способности к прямолинейному движению для целевого угла θ* поворота при рулении, прекращается в течение предварительно определенного времени, заданного посредством моностабильной схемы 56b, например 0,1 секунды, т.е. в состоянии начала руления, в котором выполняется руление вправо или руление влево, из состояния, в котором поддерживается нейтральное состояние. Затем секция 56c регулировки усиления задает усиление Ga контура управления равным "1" с тем, чтобы начинать такое управление для обеспечения способности к прямолинейному движению, что значение δa управления для обеспечения способности к прямолинейному движению суммируется с целевым углом δ* поворота при рулении.
Затем секция 56c регулировки усиления секции 56 управления задержкой задает усиление Ga контура управления равным "1" вследствие поддержания неактивного состояния вывода моностабильной схемы 56b, поскольку секция 56a определения начала руления не определяет начало руления из нейтрального состояния, когда продолжается поворачивание руля 2. Следовательно, значение δa управления для обеспечения способности к прямолинейному движению, вычисленное посредством секции SG обеспечения способности к прямолинейному движению, продолжает подаваться в сумматор 56e. Следовательно, значение δa управления для обеспечения способности к прямолинейному движению суммируется с целевым углом δ* поворота при рулении, чтобы выполнять управление для обеспечения способности к прямолинейному движению.
Секция 58 вычисления отклонения угла поворота при рулении вычитает фактический угол δr поворота при рулении, выведенный из датчика 9 угла вращения актуатора для актуатора 8a рулевого управления, составляющего актуатор 8, из целевого угла δ*a поворота при рулении после суммирования, который является суммированием целевого угла δ* поворота при рулении, выведенного из секции 51 вычисления целевого угла поворота при рулении, со значением δa управления для обеспечения способности к прямолинейному движению, чтобы вычислять отклонение Δδ угла поворота при рулении, и выводит вычисленное отклонение Δδ угла поворота при рулении в секцию 59 управления электромотором рулевого управления. Секция 59 управления электромотором рулевого управления вычисляет целевой ток im* приведения в действие для того, чтобы электромотор 8a рулевого управления, составляющий актуатор 8, обеспечивал ноль отклонения Δδ угла поворота при рулении, и выводит вычисленный целевой ток im* приведения в действие в секцию 60 вычисления отклонения тока.
Секция 60 вычисления отклонения тока вычитает фактический ток imr электромотора, выведенный из секции 61 определения тока электромотора, определяющей ток электромотора, подаваемый в электромотор 8a рулевого управления, составляющий актуатор 8, из введенного целевого тока im* приведения в действие, чтобы вычислять отклонение Δi тока, и выводит вычисленное отклонение Δi тока в секцию 62 управления током электромотора. Секция 62 управления током электромотора выполняет управление с обратной связью таким образом, что введенное отклонение Δi тока становится нулевым, а именно, таким образом, что фактический ток imr приведения в действие электромотора контролирует целевой ток im* приведения в действие, и выводит фактический ток imr приведения в действие электромотора в электромотор 8a рулевого управления.
Следует отметить, что секция 58 вычисления отклонения угла поворота при рулении, секция 59 управления электромотором рулевого управления, секция 60 вычисления отклонения тока, секция 61 определения тока электромотора и секция 62 управления током электромотора составляют систему 63 управления актуатора. Эта система 63 управления актуатора управляет углом поворота при рулении таким образом, что угол δr вращения, определенный посредством датчика 9 угла вращения актуатора рулевого управления, становится совпадающим с целевым углом δ* поворота при рулении. Таким образом, когда транспортное средство находится в состоянии движения по прямой и целевой угол δ* поворота при рулении равен "0", угол вращения управляется таким образом, что угол δr вращения становится совпадающим с целевым углом δ* поворота при рулении. Таким образом, когда секция SG обеспечения способности к прямолинейному движению, описанная выше, представляет собой основную секцию обеспечения способности к прямолинейному движению, система 63 управления актуатора составляет подсекцию обеспечения способности к прямолинейному движению.
Работа третьего варианта осуществления
Далее описывается работа вышеописанного третьего предпочтительного варианта осуществления в связи с Фиг.24(a)-25(b).
Предположим теперь, что транспортное средство находится в состоянии движения по прямой с рулем 2, удерживаемым в нейтральной позиции.
В этом состоянии движения по прямой целевой угол δ* поворота при рулении, вычисленный посредством секции 51 вычисления целевого угла поворота при рулении, является нулевым. В это время движущие силы или тормозные силы управляемых колес 17FL, 17FR, которые являются левыми и правыми ведущими колесами, становятся равными друг другу, поскольку руль 2 удерживается в нейтральной позиции. Следовательно, смещения Δfl и Δfr (величины варьирования) углов поворота при рулении управляемых колес 17FL, 17FR вследствие подруливания за счет податливости, вычисленные посредством уравнений (1) и (2), вычисленных в секции 52 управления углом поворота при рулении, становятся равными друг другу. Следовательно, поскольку величина Ac коррекции подруливания за счет податливости является значением вычитания величины Δfr варьирования из величины Δfl варьирования, величина Ac коррекции подруливания за счет податливости принудительно обнуляется.
Аналогичным образом, секция 53 дополнения способности к прямолинейному движению обнуляет разность ΔT движущих сил, поскольку движущие силы TL и TR становятся равными друг другу, и обнуляет сформированный крутящий момент Th, вычисленный посредством обращения к карте управления для оценки сформированного крутящего момента, показанной на Фиг.23. С другой стороны, поскольку руль 2 не поворачивается в состоянии движения по прямой, крутящий момент Ts поворота при рулении, соответственно, обнуляется. Поскольку руль 2 не управляется (не поворачивается) в состоянии движения по прямой, крутящий момент Ts поворота при рулении задается нулевым, так что стабилизирующий крутящий момент Tsa также является нулевым, и значение Asa управления стабилизирующим крутящим моментом также обнуляется.
С другой стороны, секция 54 компенсации внешних возмущений вычисляет значение Adis компенсации внешних возмущений, которое подавляет внешние возмущения. Следовательно, значение δa управления для обеспечения способности к прямолинейному движению является только значением значения Adis компенсации внешних возмущений. Это значение δa управления для обеспечения способности к прямолинейному движению подается в умножитель 56d секции 56 управления задержкой.
В этой секции 56 управления задержкой вывод моностабильной схемы 56b поддерживает неактивное состояние, поскольку начало руления в секции 56a определения начала руления не определяется. Следовательно, усиление Ga контура управления в секции регулировки усиления 56 задается равным "1", и это усиление Ga контура управления подается в умножитель 56d. Значение δa управления для обеспечения способности к прямолинейному движению непосредственно подается в сумматор 56e так, что оно суммируется с нулевым целевым углом δ* поворота при рулении. Следовательно, вычисляется целевой угол δ*a поворота при рулении после суммирования в соответствии со значением Adis компенсации внешних возмущений 10, и управляется угол поворота при рулении актуатора 8a рулевого управления актуатора 8 таким образом, что он становится совпадающим с целевым углом δ*a поворота при рулении после суммирования. Таким образом, может быть выполнено движение по прямой, которое исключает влияние внешних возмущений.
Следовательно, в случае если вследствие ступенчатой разности поверхности дороги, взаимно различных коэффициентов трения поверхности дороги передних ходовых колес 17FR, 17FL и т.д. передние ходовые колеса 17FR, 17FL управляются в ответ на внешние возмущения посредством ввода из поверхности дороги актуатор 8 рулевого управления вращается. Угол θmo вращения, определенный посредством датчика 9 угла вращения актуатора рулевого управления в соответствии с вводом из поверхности дороги, варьируется, и значение Adis компенсации внешних возмущений выводится в соответствии с варьированием этого угла θmo вращения.
Следовательно, актуатор 8 рулевого управления управляется в соответствии со значением Adis компенсации внешних возмущений, так что может быть сформирован крутящий момент против руления вследствие ввода из поверхности дороги узла 1B подвески.
Следовательно, способность к прямолинейному движению узла 1B подвески может обеспечиваться посредством секции SG обеспечения способности к прямолинейному движению. Помимо этого, в случае если внешние возмущения не определяются посредством секции 54 компенсации внешних возмущений в состоянии движения транспортного средства по прямой, значение δa управления для обеспечения способности к прямолинейному движению, вычисленное посредством секции SG обеспечения способности к прямолинейному движению, становится нулем и целевой угол δ* поворота при рулении, выведенный из секции 51 вычисления целевого угла поворота при рулении, становится нулем. Следовательно, целевой угол δ*a поворота при рулении после суммирования, выведенный из сумматора 56e, также становится нулем.
Следовательно, если угловое смещение при рулении возникает в электромоторе 8a рулевого управления, составляющем актуатор 8 рулевого управления, ток imr электромотора выводится из системы 63 управления актуатора, чтобы исключать это угловое смещение при рулении.
Следовательно, управляемые колеса 17FR, 17FL возвращаются к углу поворота при рулении в состоянии движения по прямой. Следовательно, способность к прямолинейному движению может обеспечиваться посредством системы 63 управления актуатора.
Тем не менее, когда руль 2 находится в состоянии правого (или левого) поворота из состояния, в котором руль 2 находится в состоянии прямолинейного движения, в котором руль 2 удерживается в нейтральной позиции, переход состояния руления вследствие руления из состояния движения по прямой в состояние руления (поворота) определяется посредством секции 56a определения начала руления.
Следовательно, сигнал задержки на управление выводится в секцию 56c регулировки усиления из моностабильной схемы 56b, чтобы поддерживать активное состояние в течение предварительно определенного времени, например 0,1 секунды. Следовательно, секция 56c регулировки усиления задает усиление Ga контура управления равным "0", в то время как сигнал задержки на управление поддерживает активное состояние. Таким образом, умноженный вывод, выведенный из умножителя 56d, указывает "0". Прекращается вывод сумматора 56e для значения δa управления для обеспечения способности к прямолинейному движению.
Следовательно, в течение промежутка времени касательно (временного) интервала T1 отклика на начальной стадии в 0,1 секунды с момента времени, в который руление начинается от нейтральной позиции руля 2, усиление Ga контура управления задается равным "0", и, таким образом, умноженный вывод, выведенный из умножителя 56d, задается равным "0", так что прекращается управление для обеспечения способности к прямолинейному движению для целевого угла δ* поворота при рулении, как обозначено посредством сплошной линии на Фиг.25(b).
Следовательно, угол θs поворота при рулении, определенный посредством датчика 4 угла поворота при рулении, подается в секцию 51 вычисления целевого угла поворота при рулении, и целевой угол δ* поворота при рулении, вычисленный посредством этой секции 51 вычисления целевого угла поворота при рулении, непосредственно подается в секцию 58 вычисления фактического отклонения руля. Следовательно, электромотор 8a рулевого управления вращательно приводится в действие таким образом, что угол поворота при рулении становится совпадающим с целевым углом δ* поворота при рулении.
В течение этого промежутка времени прекращается управление для обеспечения способности к прямолинейному движению посредством секции SG обеспечения способности к прямолинейному движению.
Следовательно, в течение интервала T1 отклика на начальной стадии начинается руление посредством узла 1B подвески, в котором точка контакта с поверхностью дороги оси KS поворотного шкворня задается в центральной позиции контакта с поверхностью дороги в области контакта шины с поверхностью дороги, и угол продольного наклона поворотного шкворня задается равным нулю.
В это время угол продольного наклона поворотного шкворня узла 1B подвески задается равным нулю. Взаимосвязь между углом продольного наклона поворотного шкворня, характеристикой отклика при рулении и стабильностью (руления или маневренности) является такой, что, как показано на Фиг.24(a), в то время как характеристика отклика при рулении указывает высокое значение, когда угол продольного наклона поворотного шкворня является нулевым, и не может обеспечиваться стабильность. Другими словами, присутствует компромиссное соотношение между характеристикой отклика при рулении относительно угла продольного наклона поворотного шкворня и стабильностью относительно угла продольного наклона поворотного шкворня.
Следовательно, в начальном состоянии, в котором руление начинается от нейтральной позиции, не выполняется управление для обеспечения способности к прямолинейному движению согласно рулевому управлению по проводам, и это руление на начальной стадии обеспечивается посредством узла 1B подвески.
В этом интервале T1 отклика на начальной стадии узел 1B подвески, угол продольного наклона поворотного шкворня которого задается равным нулю и характеристика отклика при рулении которого является высокой, как описано выше, может предоставлять характеристику более быстрого отклика при рулении (скорость относительно вертикальной оси), как обозначено посредством характеристической линии L1 посредством сплошной линии на Фиг.25(a), чем характеристика отклика при рулении (скорость относительно вертикальной оси) в транспортном средстве, имеющем систему рулевого управления системы управления по проводам общего назначения, показанная в характеристической линии L2, обозначаемой посредством штрихпунктирной линии на Фиг.25(a). В это время, поскольку варьирование угла поворота при рулении является таким, что оно соответствует варьированию угла поворота при рулении вследствие руления водителем транспортного средства посредством руля 2, неприятное ощущение (разобщенности реакций) не возникает у водителя транспортного средства.
Тем не менее, руление продолжается после интервала T1 отклика на начальной стадии только с помощью характеристики отклика при рулении, которую имеет узел 1B подвески. В этом случае в качестве характеристической линии L3, обозначаемой посредством пунктирной линии L3 на Фиг.25(a), становится активированной характеристика отклика при рулении транспортного средства вследствие руления в интервале T2 отклика на средней стадии и в интервале T3 отклика на поздней стадии. Помимо этого становится большим явление увода транспортного средства в направлении внутренней части транспортного средства от интервала T2 отклика на средней стадии до интервала T3 отклика на поздней стадии.
Следовательно, в третьем варианте осуществления, как показано на Фиг.25(b), управление для обеспечения способности к прямолинейному движению посредством секции SG обеспечения способности к прямолинейному движению для целевого угла δ* поворота при рулении начинается пошагово, причем секция SG обеспечения способности к прямолинейному движению составляет секцию 52 управления целевым углом поворота при рулении, секцию 53 дополнения способности к прямолинейному движению и секцию 54 компенсации внешних возмущений, после временного интервала, например, в 0,1 секунды, в котором интервал T1 отклика на начальной стадии истек, как показано на Фиг.25(b). Следовательно, подавляется характеристика отклика при рулении транспортного средства через узел 1B подвески, чтобы подавлять нестабильность транспортного средства, и способность к прямолинейному движению узла 1B подвески дополняется посредством системы управления по проводам, так чтобы давать возможность обеспечивать маневренность и стабильность.
Далее, после того как истек период времени, например, в 0,3 секунды, в который завершается интервал T2 отклика на средней стадии, характеристика отклика при рулении подавляется сильнее согласно управлению для обеспечения способности к прямолинейному движению посредством секции SG обеспечения способности к прямолинейному движению по сравнению с общей характеристикой отклика при рулении транспортного средства, так что может обеспечиваться тенденция недостаточной поворачиваемости. Таким образом, как показано посредством характеристической линии L1, обозначаемой посредством сплошной линии на Фиг.25(a), могут быть повышены маневренность и стабильность и может быть реализована идеальная характеристика отклика при рулении транспортного средства, обозначаемая посредством характеристической линии L1.
Как описано выше, согласно системе рулевого управления транспортного средства в этом варианте осуществления плечо стабилизации задается в области контакта (с поверхностью дороги) шины в узле 1B подвески. Следовательно, может быть задан меньшим момент вокруг оси KS поворотного шкворня. Следовательно, поскольку даже в третьем варианте осуществления руление может быть выполнено за счет меньшей осевой силы зубчатой рейки и направление (ориентация) ходовых колес может управляться за счет меньшей силы, может улучшаться характеристика отклика при рулении.
Как описано выше, поскольку в вышеописанном третьем варианте осуществления улучшается характеристика отклика при рулении, которую имеет сам узел 1B подвески, посредством задания, по меньшей мере, оси KS поворотного шкворня таким образом, что она проходит в области контакта (с поверхностью дороги) шины, помимо этого управление углом поворота при рулении, дополнение способности к прямолинейному движению и компенсация внешних возмущений выполняются посредством секции SG обеспечения способности к прямолинейному движению из системы SS управления по проводам, чтобы обеспечивать способность к прямолинейному движению узла 1B подвески.
Следовательно, в случае если руление влево или вправо выполняется из состояния, в котором руль 2 удерживается в нейтральной позиции, характеристика быстрого отклика обеспечивается с использованием характеристики быстрого отклика при рулении узла 1B подвески непосредственно в интервале T1 отклика на начальной стадии. После этого, когда интервал отклика входит в интервал T2 отклика на средней стадии после истечения интервала T1 отклика на начальной стадии, необходимо придавать большую значимость стабильности, чем значимость характеристике отклика при рулении. Поскольку усиление Ga контура управления задается равным "1" посредством секции 56c регулировки усиления секции 56 управления задержкой в системе SBW управления по проводам, то начинается управление для обеспечения способности к прямолинейному движению с использованием значения δa управления для обеспечения способности к прямолинейному движению, вычисленного посредством секции SG обеспечения способности к прямолинейному движению.
Следовательно, начинается управление для обеспечения способности к прямолинейному движению, к примеру управление углом поворота при рулении, дополнение способности к прямолинейному движению, компенсация внешних возмущений и т.д., так что обеспечивается стабильность с подавлением характеристики быстрого отклика при рулении посредством узла 1B подвески. Кроме того, в интервале T3 отклика на поздней стадии дополнительно уменьшается характеристика отклика при рулении, чтобы подавлять явление увода транспортного средства в направлении внутренней части транспортного средства, транспортное средство подвержено тенденции недостаточной поворачиваемости и дополнительно подавляется нестабильность транспортного средства, так что может устанавливаться идеальное управление характеристикой отклика при рулении.
Кроме того, секция 52 управления углом поворота при рулении устанавливается с возможностью предоставлять управление для обеспечения способности к прямолинейному движению со смещениями (величинами варьирования) управляемых колес 17FL, 17FR вследствие учтенного подруливания за счет податливости. Таким образом, можно задавать жесткости втулок, вставленных между опорными секциями на стороне кузова 1A транспортного средства первой тяги 37 и второй тяги 38, которые представляют собой нижний элемент тяги, таким образом, что они мягкие (небольшие), и может повышаться комфортабельность транспортного средства посредством уменьшения степени передачи вибрации от поверхности дороги на кузов 1A транспортного средства через первую тягу 37 и вторую тягу 38.
Следует отметить, что в третьем варианте осуществления система 50 управления рулением состоит из средств. Тем не менее, настоящее изобретение не ограничено этим. Например, секция 51 вычисления целевого угла поворота при рулении и секция SG обеспечения способности к прямолинейному движению состоят из арифметического процессора, к примеру микрокомпьютера, и этот арифметический процессор может выполнять процесс управления рулением, показанный на Фиг.26.
Этот процесс управления рулением показывается на Фиг.26. Другими словами, сначала, на этапе S1, арифметический процессор считывает необходимые данные, требуемые для арифметической обработки, такие как скорость V транспортного средства, угол θs поворота при рулении, определенный посредством датчика 4 угла поворота при рулении, угол θmo вращения, определенный посредством датчика 9 угла вращения актуатора, движущие силы TL, TR левых и правых ходовых колес системы 71 управления движущей силой, крутящий момент Ts поворота при рулении, определенный посредством датчика 5 крутящего момента, и т.д. Затем, на этапе S2, арифметический процессор определяет, представляет собой текущее состояние или нет состояние начала руления, в котором руль 2 поворачивается вправо или влево из состояния, в котором руль 2 удерживается в нейтральной позиции, на основе угла θs поворота при рулении, определенного посредством датчика 4 угла поворота при рулении. Если не представляет собой состояние начала руления, процедура переходит к этапу S3.
На этом этапе S3 арифметический процессор определяет, задан или нет флаг F управления, представляющий то, что текущее время (состояние) представляет собой состояние управления началом руления, равным "1". Если флаг F управления сбрасывается до "0", процедура переходит к этапу S4, на котором усиление Ga контура управления задается равным "1", и процедура переходит к этапу S5. На этапе S5 целевой угол δ* поворота при рулении вычисляется на основе скорости V транспортного средства и угла θs поворота при рулении аналогично вышеописанной секции 51 вычисления целевого угла поворота при рулении.
Затем процедура переходит к этапу S6. Аналогично секции 52 управления углом поворота при рулении, коэффициент sf подруливания за счет податливости умножается на движущие силы TL, TR левых и правых ходовых колес, чтобы вычислять смещения Δfl, Δfr (величины варьирования) управляемых колес 17FL, 17FR и значение Ac управления подруливанием за счет податливости вычисляется на основе этих данных смещений.
Затем процедура переходит к этапу S7. Аналогично секции 53 дополнения способности к прямолинейному движению, посредством обращения к карте управления для оценки сформированного крутящего момента, показанной на Фиг.12, на основе разности ΔT движущих сил (=TL-TR) для движущих сил TL, TR левых и правых ходовых колес, сформированный крутящий момент Th, который формируется во время операции руления вследствие явления паразитного силового подруливания. Затем стабилизирующий крутящий момент Tsa вычисляется посредством вычитания этого сформированного крутящего момента Th из крутящего момента Ts поворота при рулении и значение Asa управления стабилизирующим крутящим моментом вычисляется посредством умножения этого стабилизирующего крутящего момента Tsa на предварительно определенное усиление Ksa.
Затем процедура переходит к этапу S8. На этапе S8 арифметический процессор оценивает внешние возмущения, которые вводятся в транспортное средство и отделяются для соответствующих полос частот на основе угла θmo вращения электромотора из датчика 9 угла вращения актуатора рулевого управления, крутящего момента Ts поворота при рулении и тока imr электромотора, определенного посредством секции 61 определения тока электромотора, и вычисляет значения Adis компенсации внешних возмущений, чтобы подавлять эти внешние возмущения. Затем процедура переходит к этапу S9. На этапе S9, целевой угол δ*a поворота при рулении после суммирования вычисляется посредством следующего уравнения (3) на основе целевого угла δ* поворота при рулении, значения Ac управления подруливанием за счет податливости, значения Asa управления стабилизирующим крутящим моментом и значения Adis компенсации внешних возмущений.
δ*a=δ*+Ga(Ac+Asa+Adis)... (3)
Затем процедура переходит к этапу S10. После вывода целевого угла δ*a поворота при рулении после суммирования, вычисленного на этапе S9, в секцию 58 вычисления отклонения угла поворота при рулении на Фиг.22, процедура возвращается к этапу S1. Помимо этого, если результат определения на этапе S2 представляет собой состояние начала руления ("Да"), процедура переходит к этапу S11, на котором флаг F управления задается равным "1", и процедура переходит к этапу S12. Кроме того, результат определения на этапе S3 является таким, что флаг F управления задается равным "1", процедура переходит непосредственно к этапу S12.
На этапе S12 арифметический процессор определяет, истекло или нет предварительно установленное время задержки (например, 0,1 секунды). В это время, если предварительно установленное время задержки не истекло, процедура переходит к этапу S13. На этапе S13 усиление Ga контура управления задается равным "0", и процедура переходит к этапу S5, чтобы вычислять целевой угол δ* поворота при рулении. Если результат определения на этапе S12 указывает, что предварительно установленное время задержки (например, 0,1 секунды) истекло, процедура переходит к этапу S14. На этапе S14 флаг F управления сбрасывается до "0", и процедура переходит к этапу S4, на котором усиление Ga контура управления задается равным "1".
Даже в процессе вычисления команд управления углом поворота при рулении, показанном на Фиг.26, когда текущее состояние не представляет собой состояние начала руления, в котором руление в направлении вправо или направлении влево выполняется из состояния, в котором руль 2 удерживается в нейтральной позиции, выполняется такое управление для обеспечения способности к прямолинейному движению, что значение δa управления для обеспечения способности к прямолинейному движению, которое является суммированием значения Ac управления подруливанием за счет податливости, значения Asa управления стабилизирующим крутящим моментом и значения Adis компенсации внешних возмущений, суммируется с целевым углом δ* поворота при рулении.
Принимая во внимание, что, когда текущее состояние представляет собой состояние начала руления, в котором руление в направлении вправо или направлении влево выполняется из состояния, в котором руль 2 удерживается в нейтральной позиции, усиление Ga контура управления задается равным "0" до тех пор, пока не истекло предварительно установленное время задержки. Следовательно, прекращается управление для обеспечения способности к прямолинейному движению. Следовательно, только целевой угол δ* поворота при рулении выводится в секцию 58 вычисления отклонения угла поворота при рулении. Следовательно, электромотор 8a рулевого управления, составляющий актуатор 8 рулевого управления, вращательно приводится в действие. Следовательно, характеристика быстрого отклика при рулении самого узла подвески задается как характеристика отклика при рулении на начальной стадии, так что может достигаться характеристика быстрого отклика при рулении.
После этого, если время задержки истекло, усиление Ga контура управления задается равным "1". Следовательно, электромотор 8a рулевого управления, составляющий актуатор 8 рулевого управления, вращательно приводится в действие согласно значению значения δa управления для обеспечения способности к прямолинейному движению, с которым суммируются значение Ac управления подруливанием за счет податливости, значение Asa управления стабилизирующим крутящим моментом и значение Adis компенсации внешних возмущений и которое суммируется с целевым углом δ* поворота при рулении. Следовательно, подавляется характеристика быстрого отклика узла 1B подвески, и поддерживается способность к прямолинейному движению узла 1B подвески, так что может достигаться идеальная характеристика отклика при рулении.
Даже в этом процессе управления рулением целевой угол δ* поворота при рулении указывает нуль в состоянии движения транспортного средства по прямой, и если не образуется внешнее возмущение, этот целевой угол δ* поворота при рулении непосредственно подается в секцию 58 вычисления отклонения угла поворота при рулении, показанную на Фиг.22. Следовательно, способность к прямолинейному движению обеспечивается посредством системы 63 управления актуатора аналогично тому, как описано выше. При обработке, показанной на Фиг.26, процесс на этапе S5 соответствует секции 51 вычисления целевого угла поворота при рулении, процесс на этапе S7 соответствует секции 53 дополнения способности к прямолинейному движению, процессы на этапах S5, S6, S7 соответствуют секции SG обеспечения способности к прямолинейному движению, на этапах S2, S3, S4 и этапах S11, S12, S13, S14 соответствуют секции 56 управления задержкой, и процессы на этапах S2-S14 соответствуют секции SRS задания характеристики отклика при рулении.
Помимо этого в вышеописанном третьем варианте осуществления секция SG обеспечения способности к прямолинейному движению состоит из секции 52 управления углом поворота при рулении, секции 53 дополнения способности к прямолинейному движению и секции 54 компенсации внешних возмущений. Тем не менее, настоящее изобретение не ограничено этим. Любая одна или две из секции 52 управления углом поворота при рулении, секции 53 дополнения способности к прямолинейному движению и секции 54 компенсации внешних возмущений могут исключаться.
Преимущество третьего варианта осуществления
(1) В третьем варианте осуществления транспортное средство включает в себя: систему управления рулением, которая приводит в действие актуатор в соответствии с состоянием руления руля, чтобы управлять управляемыми колесами; и узел подвески, который поддерживает управляемые колеса на кузове транспортного средства. Узел подвески задается таким образом, что точка контакта с поверхностью дороги оси поворотного шкворня находится в области контакта шины, когда руль размещается в нейтральной позиции. Помимо этого вышеописанная секция управления рулением включает в себя секцию обеспечения способности к прямолинейному движению, которая обеспечивает способность к прямолинейному движению узла подвески.
Таким образом, может быть дополнительно уменьшен момент вокруг оси поворотного шкворня узла подвески. Таким образом, руление может быть выполнено за счет меньшей осевой силы зубчатой рейки, и направление (ориентация) ходовых колес может управляться за счет меньшей силы.
Следовательно, может улучшаться характеристика отклика при рулении. В это время, поскольку угол продольного наклона поворотного шкворня задается таким образом, что он предоставляет значение около нуля, то может быть сконструирован узел подвески, имеющий характеристику более быстрого отклика при рулении.
К тому же уменьшение способности к прямолинейному движению вследствие обеспечения характеристики отклика при рулении узла подвески может обеспечиваться (предусматриваться) посредством секции обеспечения способности к прямолинейному движению.
Помимо этого, поскольку система управления по проводам составляет секцию обеспечения способности к прямолинейному движению, имеющую актуатор рулевого управления и систему управления актуатора, необязательно располагать независимо секцию обеспечения способности к прямолинейному движению. В таком случае может быть упрощена конструкция. Помимо этого в качестве секции обеспечения способности к прямолинейному движению секция SG обеспечения способности к прямолинейному движению секции SRS задания характеристики отклика при рулении служит в качестве основной секции обеспечения способности к прямолинейному движению, а система 63 управления актуатора служит в качестве подсекции обеспечения способности к прямолинейному движению. Следовательно, обе из секций обеспечения способности к прямолинейному движению могут точно обеспечивать способность к прямолинейному движению узла подвески.
Когда руль поворачивается вправо или влево из состояния, в котором руль удерживается в нейтральной позиции, управление для обеспечения способности к прямолинейному движению секции обеспечения способности к прямолинейному движению задерживается посредством секции управления задержкой. Следовательно, характеристика быстрого отклика обеспечивается посредством покрытия характеристики отклика на начальной стадии с помощью характеристики отклика при рулении самого узла подвески. После этого характеристика отклика при рулении самого узла подвески регулируется посредством управления для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению, так что может обеспечиваться идеальная характеристика отклика при рулении.
(2) Секция обеспечения способности к прямолинейному движению выполняет коррекции смещений для управляемых колес посредством оценки, по меньшей мере, подруливания за счет податливости. Следовательно, можно уменьшать жесткости втулок, вставленных между опорными секциями на стороне кузова транспортного средства нижних рычагов, составляющих узел подвески, так что может повышаться комфортабельность транспортного средства.
(3) Секция обеспечения способности к прямолинейному движению обеспечивает способность к прямолинейному движению посредством вычисления стабилизирующего крутящего момента. Следовательно, поскольку характеристика быстрого отклика узла подвески обеспечивается в секции обеспечения способности к прямолинейному движению, может обеспечиваться уменьшенная способность к прямолинейному движению посредством стабилизирующего крутящего момента и могут быть повышены маневренность и стабильность.
(4) Когда руление посредством руля начинается от нейтральной позиции руля, секция задания характеристики отклика при рулении системы управления по проводам задает характеристику отклика при рулении, которую имеет сам узел подвески, в качестве характеристики отклика при рулении на начальной стадии, на начальной стадии начала руления, и такое управление через актуатор рулевого управления, чтобы обеспечивать способность к прямолинейному движению самого узла подвески, начинается посредством секции обеспечения способности к прямолинейному движению системы управления по проводам после прохождения времени выполнения начальной стадии. Таким образом, может обеспечиваться характеристика быстрого отклика при рулении узла подвески при рулении на начальной стадии и управление через актуатор рулевого управления, чтобы обеспечивать способность к прямолинейному движению самого узла подвески может быть выполнено посредством секции обеспечения способности к прямолинейному движению после прохождения времени выполнения начальной стадии, так что может быть получена идеальная характеристика отклика при рулении.
(4)' Вышеописанная секция задания характеристики отклика при рулении задает характеристику быстрого отклика при рулении, которая является характеристикой отклика при рулении самого узла подвески в состоянии руления на начальной стадии, когда поворачивается руль от нейтральной позиции руля, и задает требуемую характеристику отклика при рулении согласно управлению для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению, когда текущее состояние представляет собой состояние руления после состояния руления на начальной стадии. Следовательно, узел подвески может предоставлять характеристику быстрого отклика при рулении, и способность к прямолинейному движению узла подвески обеспечивается посредством секции обеспечения способности к прямолинейному движению. Таким образом, может обеспечиваться идеальная характеристика отклика при рулении.
(5) Вышеописанная секция задания характеристики отклика при рулении содержит секцию управления задержкой, которая задерживает начало управления для обеспечения способности к прямолинейному движению посредством вышеописанной секции обеспечения способности к прямолинейному движению, когда руление посредством руля начинается от нейтральной позиции руля.
Следовательно, поскольку секция управления задержкой задерживает начало управления для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению, характеристика отклика при рулении на начальной стадии может указывать характеристику быстрого отклика при рулении, которую имеет сам узел подвески.
(5)' Вышеописанная секция управления задержкой содержит секцию регулировки усиления, которая регулирует начало управления для обеспечения способности к прямолинейному движению посредством вышеописанной секции обеспечения способности к прямолинейному движению. Таким образом, секция регулировки усиления задает, например, усиление для значения управления для обеспечения способности к прямолинейному движению при управлении для обеспечения способности к прямолинейному движению равным "0", чтобы не выполнять управление для обеспечения способности к прямолинейному движению, и задает усиление равным значению, большему "0", например, "1", чтобы позволять начинать управление для обеспечения способности к прямолинейному движению. Следовательно, вследствие предоставления секции регулировки усиления может быть упрощено регулирование начала управления для обеспечения способности к прямолинейному движению.
(6) Вышеописанная секция управления задержкой начинает управление для обеспечения способности к прямолинейному движению через секцию обеспечения способности к прямолинейному движению после задержки в 0,1 секунду от времени начала руления, когда руление вправо или влево выполняется из состояния, в котором руль удерживается в нейтральной позиции.
Следовательно, характеристика отклика при рулении на начальной стадии может эффективно использовать характеристику быстрого отклика при рулении, которую имеет сам узел подвески, и управление для обеспечения способности к прямолинейному движению посредством вышеописанной секции обеспечения способности к прямолинейному движению начинается после интервала на начальной стадии с задержкой в 0,1 секунду. Таким образом, может быть получена идеальная характеристика отклика при рулении.
(7) Вышеописанная секция управления задержкой начинает управление для обеспечения способности к прямолинейному движению пошагово в случае, если начинается управление для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению. Следовательно, характеристика отклика при рулении может регулироваться согласно управлению углом поворота при рулении и дополнению способности к прямолинейному движению, выполняемому непосредственно в момент времени начала управления.
(8) Вышеописанная секция управления задержкой постепенно начинает вышеописанное управление для обеспечения способности к прямолинейному движению в случае, если начинается управление для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению. Следовательно, сглаживается варьирование в характеристике отклика при рулении в момент времени начала управления, так что может подавляться чувство, отличающееся от чувства фактического руления, возникающего у водителя транспортного средства.
(9) Вышеописанная система управления рулением включает в себя: секцию вычисления целевого угла поворота при рулении, которая вычисляет целевой угол поворота при рулении в соответствии с углом поворота при рулении; сумматор, который суммирует целевой угол поворота при рулении, вычисленный посредством целевой секции вычисления угла поворота при рулении, со значением управления для обеспечения способности к прямолинейному движению секции обеспечения способности к прямолинейному движению; секцию управления электромотором рулевого управления, которая формирует управляющий ток электромотора, чтобы осуществлять вывод по суммированию сумматора с углом вращения электромотора рулевого управления, составляющего актуатор; и секцию управления током, которая формирует ток приведения в действие электромотора, подаваемый в электромотор рулевого управления, который совпадает с управляющим током электромотора.
Следовательно, секция вычисления целевого угла поворота при рулении вычисляет целевой угол поворота при рулении, который согласуется с углом поворота при рулении руля, суммирует значение управления для обеспечения способности к прямолинейному движению с целевым углом поворота при рулении посредством сумматора, формирует целевой ток электромотора, который задает вывод по суммированию сумматора совпадающим с углом вращения электромотора рулевого управления, составляющего актуатор, формирует ток приведения в действие электромотора, который становится совпадающим с целевым управляющим током электромотора в секции управления током электромотора, и выводит этот ток приведения в действие электромотора в электромотор рулевого управления. Таким образом, управление приведением в действие электромотора рулевого управления может быть выполнено в соответствии с углом поворота при рулении руля.
Поскольку целевой угол поворота при рулении, выведенный из секции вычисления целевого угла поворота при рулении, регулируется посредством секции задания характеристики отклика при рулении, может достигаться оптимальное управление рулением.
(10) Плечо стабилизации оси поворотного шкворня, проходящей через верхнюю точку поворота и нижнюю точку поворота вышеописанного элемента тяги, находится в области контакта шины. Следовательно, может быть задан меньшим момент вокруг оси поворотного шкворня. Таким образом, руление может осуществляться за счет меньшей осевой силы зубчатой рейки и направление (ориентация) ходовых колес может управляться за счет меньшей силы.
(11) Узел подвески для транспортного средства согласно настоящему изобретению может применяться к стоечному механизму подвески.
Следовательно, может достигаться меньшее число деталей и может быть упрощено задание оси поворотного шкворня согласно настоящему изобретению.
(12) Когда поворачивается руль от нейтральной позиции, характеристика быстрого отклика при рулении, которую имеет сам узел подвески, задается в качестве характеристики отклика при рулении на начальной стадии, на начальной стадии начала руления и характеристика отклика при рулении самого узла подвески регулируется до требуемой характеристики отклика при рулении через управление для обеспечения способности к прямолинейному движению секции обеспечения способности к прямолинейному движению после истечения времени выполнения начальной стадии. Следовательно, когда поворачивается руль от нейтральной позиции, характеристика быстрого отклика при рулении узла подвески и регулирование характеристики отклика при рулении посредством управления для обеспечения способности к прямолинейному движению секции обеспечения способности к прямолинейному движению позволяют получать идеальную характеристику отклика при рулении.
Модификации третьего предпочтительного варианта осуществления
Следует отметить, что в вышеописанном третьем варианте осуществления секция 54 компенсации внешних возмущений устанавливается в секции SG обеспечения способности к прямолинейному движению. Тем не менее, настоящее изобретение не ограничено этим. Как показано на Фиг.27, секция 54 компенсации внешних возмущений устанавливается так, что она является независимой от секции SG обеспечения способности к прямолинейному движению. Затем значение Adis компенсации внешних возмущений, выведенное из этой секции 54 компенсации внешних возмущений, может быть суммировано посредством сумматора 57 с целевым углом δ*a поворота при рулении после суммирования, выведенным из сумматора 56e. В этом случае поскольку значение Adis компенсации внешних возмущений в любом случае суммируется с целевым углом δ* поворота при рулении, влияние внешнего возмущения может в любом случае подавляться независимо (или без учета) от состояния начала руления.
Помимо этого в вышеописанном третьем варианте осуществления, секция SG обеспечения способности к прямолинейному движению состоит из секции 52 управления углом поворота при рулении, секции 53 дополнения способности к прямолинейному движению и секции 54 компенсации внешних возмущений, в состоянии, в котором состояние начала руления, в котором руление вправо и влево начинается из состояния, в котором руль поддерживается в нейтральном состоянии, целевой угол δ* поворота при рулении непосредственно вводится в секцию 58 вычисления отклонения угла поворота при рулении без выполнения управления для обеспечения способности к прямолинейному движению, при котором значение δa управления для обеспечения способности к прямолинейному движению суммируется с целевым углом δ* поворота при рулении в течение интервала T1 отклика на начальной стадии.
Тем не менее, настоящее изобретение не ограничено этим. В состоянии начала руления, в котором руление вправо или влево начинается из состояния, в котором поддерживается нейтральное состояние, разность углов вращения зачастую возникает между углом θs поворота при рулении, определенным посредством датчика 4 угла поворота при рулении, и углом θmo вращения, определенным посредством датчика 9 угла вращения актуатора рулевого управления. В этом случае предпочтительно формировать крутящий момент в актуаторе 8 рулевого управления, компенсирующий разность углов вращения между углом θs поворота при рулении и углом θmo вращения.
Чтобы достигать вышеописанной сущности, предпочтительно может быть установлена секция 111 компенсации способности к прямолинейному движению, которая является независимой от секции SG обеспечения способности к прямолинейному движению, как показано на Фиг.28. Значение Asc компенсации способности к прямолинейному движению, выведенное из этой секции 111 компенсации способности к прямолинейному движению, суммируется с целевым углом δ*a поворота при рулении после суммирования, выведенным из сумматора 56e, посредством сумматора 57. Следует отметить, что в качестве структуры секции 111 компенсации способности к прямолинейному движению фактический угол поворота при рулении вычисляется на основе угла θmo вращения актуатора 8 рулевого управления, определенного посредством датчика 9 угла вращения актуатора рулевого управления, и значение Asc компенсации способности к прямолинейному движению в соответствии с фактическим углом поворота при рулении вычисляется посредством обращения к карте управления, представляющей взаимосвязь между предварительно установленным фактическим углом поворота при рулении и значением Asc компенсации способности к прямолинейному движению, на основе вычисленного фактического угла поворота при рулении.
Помимо этого в качестве другой структуры секции 111 компенсации способности к прямолинейному движению осевая сила зубчатой рейки оси 14 зубчатой рейки определяется посредством датчика осевой силы зубчатой рейки, такого как тензодатчик, либо оценивается осевая сила зубчатой рейки, и значение Asc компенсации способности к прямолинейному движению вычисляется посредством обращения к карте управления, представляющей взаимосвязь между предварительно установленной осевой силой зубчатой рейки и значением Asc компенсации способности к прямолинейному движению.
Кроме того, в качестве еще одной другой конструкции значения 111 компенсации способности к прямолинейному движению фактический угол поворота при рулении вычисляется на основе угла θmo вращения актуатора 8 рулевого управления, определенного посредством датчика 9 угла вращения актуатора рулевого управления, и в случае если вычисленный фактический угол поворота при рулении находится в диапазоне, равном или меньшем предварительно определенного значения, с нейтральной позицией в качестве центра, предварительно установленное постоянное значение Asc компенсации способности к прямолинейному движению суммируется с целевым углом δ*a поворота при рулении после суммирования посредством сумматора 57.
Помимо этого в вышеописанном третьем варианте осуществления приводится пояснение в случае, если управление для обеспечения способности к прямолинейному движению, при котором значение δa управления для обеспечения способности к прямолинейному движению суммируется с целевым углом δ* поворота при рулении в момент времени, в который завершается интервал на начальной стадии, сразу начинается с характеристической линии L10 пошагово. Тем не менее, настоящее изобретение не ограничено этим. Как показано посредством характеристической линии L11, обозначаемой посредством штрихпунктирной линии на Фиг.25(b), значение δa управления для обеспечения способности к прямолинейному движению может постепенно увеличиваться после прохождения интервала на начальной стадии, чтобы начинать корректирующий процесс. Помимо этого, как показано посредством характеристической линии L12 на Фиг.25(b), значение δa управления для обеспечения способности к прямолинейному движению может постепенно увеличиваться до завершения интервала на начальной стадии. Кроме того, как показано посредством характеристической линии L13, которая является линией, имеющей предварительно определенный градиент на Фиг.25(b), может постепенно увеличиваться значение управления для обеспечения способности к прямолинейному движению.
Чтобы варьировать градиенты этих характеристических линий, усиление Ga контура управления варьируется наряду с истечением времени, чтобы предоставлять регулирование градиентов характеристических линий вместо случая задания усиления Ga контура управления в секции 56c регулировки усиления равным "0" и "1".
Помимо этого в вышеописанном третьем варианте осуществления усиление Ga контура управления задается равным "0" в течение интервала T1 на начальной стадии посредством секции 56c регулировки усиления секции 56 управления задержкой в состоянии, в котором руление начинается из состояния, в котором руль 2 поддерживает нейтральную позицию, и в течение других интервалов усиление Ga контура управления задается равным "1". Тем не менее, настоящее изобретение не ограничено этим. Усиление Ga контура управления задается равным "0" в течение интервала T1 на начальной стадии, усиление Ga контура управления в течение интервала T2 на средней стадии и интервала T3 на поздней стадии после прохождения интервала T1 на начальной стадии задается равным, например, "0,8", и усиление Ga контура управления задается равным "1" в интервалах других стадий, так что аспект управления для обеспечения способности к прямолинейному движению узла 1B подвески может варьироваться в соответствии с состоянием движения транспортного средства.
Четвертый вариант осуществления изобретения
Затем поясняется четвертый предпочтительный вариант осуществления согласно настоящему изобретению со ссылкой на Фиг.29. В четвертом варианте осуществления модифицируется конструкция секции 56 управления задержкой в третьем варианте осуществления. Другими словами, в четвертом варианте осуществления секция 56 управления задержкой имеет такую конструкцию, как показано на Фиг.29. Эта секция 56 управления задержкой включает в себя: секцию 56a определения начала руления; сумматор 56e; секцию 56g выбора; первую секцию 56h регулировки усиления; и вторую секцию 56i регулировки усиления.
Здесь следует отметить, что секция 56a определения начала руления выводит сигнал Sss определения начала руления, который находится в активном состоянии в течение промежутка времени с момента времени, в который руление вправо или влево начинается из состояния, в котором нейтральное состояние руля 2 поддерживается в течение предварительно определенного времени, до такой степени, что, например, может быть определено состояние движения по прямой, до момента времени, в который состояние, в котором последующая нейтральная позиция определяется на основе угла θs поворота при рулении, определенного посредством датчика 4 угла поворота при рулении, в секцию 56g выбора.
Секция 56g выбора включает в себя нормально замкнутый неподвижный контактный вывод ta, нормально разомкнутый неподвижный контактный вывод tb и подвижный контактный вывод tc, чтобы выбирать эти неподвижные контактные выводы ta и tb. Подвижный контактный вывод tc вводит значение δa управления для обеспечения способности к прямолинейному движению, выведенное из секции SG обеспечения способности к прямолинейному движению. Нормально замкнутый неподвижный контактный вывод ta соединяется с сумматором 56e через вторую секцию 56i регулировки усиления. Нормально разомкнутый неподвижный контактный вывод tb соединяется с сумматором 56e через первую секцию 56h регулировки усиления.
Затем, когда подвижный контактный вывод tc секции 56g выбора выбирает нормально разомкнутый неподвижный контактный вывод ta, когда сигнал Sss определения начала руления, выведенный из секции 56a определения начала руления, находится в неактивном состоянии. Помимо этого секция 56g выбора выбирает нормально разомкнутый неподвижный контактный вывод tb, когда сигнал Sss определения начала руления находится в активном состоянии.
Первая секция 56h регулировки усиления прекращает управление для обеспечения способности к прямолинейному движению относительно целевого угла δ* поворота при рулении в течение предварительно определенного времени, соответствующего предварительно установленному интервалу T1 отклика на начальной стадии, описанному выше, например 0,1 секунды, когда значение δa управления для обеспечения способности к прямолинейному движению вводится в нее через секцию 56g выбора. Другими словами, секция 56h регулировки усиления прекращает вывод значения δa управления для обеспечения способности к прямолинейному движению для интервала T1 отклика на начальной стадии в первом интервале, например в 0,1 секунду (а именно, это соответствует случаю, в котором усиление Ga задается равным "0" в третьем варианте осуществления). Помимо этого первая секция 56h регулировки усиления умножает усиление контура управления, например "0,8", на значение δa управления для обеспечения способности к прямолинейному движению после прохождения интервала T1 отклика на начальной стадии и выводит умноженный результат в сумматор 56e (а именно, это приблизительно соответствует состоянию, в котором усиление Ga контура управления в третьем варианте осуществления задается равным "1").
Помимо этого вторая секция 56i регулировки усиления умножает усиление контура управления, например "1", на значение δa управления для обеспечения способности к прямолинейному движению, чтобы обеспечивать достаточную способность к прямолинейному движению во время движения по прямой. Здесь следует отметить, что усиления, заданные в первой секции 56h регулировки усиления и во второй секции 56i регулировки усиления, не ограничиваются диапазоном от 0 до 1, а могут задаваться равным произвольным значениям в соответствии с характеристикой узла 1B подвески.
Следовательно, секция 56 управления задержкой не определяет начало руления из нейтрального состояния, когда продолжается поворачивание руля 2. Следовательно, значение δa управления для обеспечения способности к прямолинейному движению, вычисленное в секции SG обеспечения способности к прямолинейному движению посредством секции 56g выбора, подается во вторую секцию 56i регулировки усиления. Следовательно, усиление контура управления "1" умножается на значение δa управления для обеспечения способности к прямолинейному движению, и, таким образом, значение δa управления для обеспечения способности к прямолинейному движению непосредственно подается в сумматор 56e. Следовательно, предпочтительное управление для обеспечения способности к прямолинейному движению выполняется посредством суммирования значения δa управления для обеспечения способности к прямолинейному движению с целевым углом δ* поворота при рулении.
С другой стороны, когда начало руления из нейтрального состояния определяется посредством секции 56a определения начала руления, секция 56g выбора переключает подвижный контактный вывод 5c на нормально разомкнутый неподвижный контактный вывод tb, так что значение δa управления для обеспечения способности к прямолинейному движению подается в секцию 56h регулировки усиления. Следовательно, в течение периода T1 отклика на начальной стадии (например, 0,1 секунды) прекращается вывод значения δa управления для обеспечения способности к прямолинейному движению в сумматор 56e. Следовательно, задерживается начало управления для обеспечения способности к прямолинейному движению посредством значения δa управления для обеспечения способности к прямолинейному движению относительно целевого угла δ* поворота при рулении. После этого, секция 56h регулировки усиления задает усиление Ga контура управления равным "0,8" после прохождения предварительно определенного времени, так что незначительно подавляется значение δa управления для обеспечения способности к прямолинейному движению, и это незначительно подавленное значение суммируется с целевым углом δ* поворота при рулении. Следовательно, начинается управление для обеспечения способности к прямолинейному движению для целевого угла δ* поворота при рулении, при том что подавляется нестабильность, сформированная в узле 1B подвески, может быть получена идеальная характеристика отклика при рулении.
После этого, когда руль 2 возвращается в нейтральную позицию, сигнал Sss определения начала руления, выведенный из секции 56a определения начала руления, находится в неактивном состоянии. Следовательно, секция 56g выбора переключается для возврата подвижного контактного вывода tc к нормально замкнутому неподвижному контактному выводу ta, так что значение δa управления для обеспечения способности к прямолинейному движению, вычисленное посредством секции SG обеспечения способности к прямолинейному движению, подается во вторую секцию 56i регулировки усиления, и значение δa управления для обеспечения способности к прямолинейному движению непосредственно подается в сумматор 56e. Следовательно, продолжается предпочтительное управление для обеспечения способности к прямолинейному движению для целевого угла δ* поворота при рулении.
Преимущество четвертого варианта осуществления
Таким образом, в четвертом варианте осуществления при рулении, чтобы поворачивать руль 2 в направлении вправо или влево из состояния, в котором руль 2 поддерживается в нейтральном состоянии, прекращается вывод значения δa управления для обеспечения способности к прямолинейному движению в течение, например, 0,1 секунды, а именно, в течение интервала T1 отклика на начальной стадии в сумматор 56e посредством первой секции 56h регулировки усиления. После этого начинается вывод значения δa управления для обеспечения способности к прямолинейному движению после прохождения интервала T1 отклика на начальной стадии в сумматор 56e. Следовательно, могут быть получены работа и преимущество, идентичные третьему варианту осуществления, описанному выше.
Помимо этого, поскольку, когда руль 2 возвращается в нейтральную позицию, сигнал Sss определения начала руления, выведенный из секции 56a определения начала руления, возвращается в неактивное состояние, само значение δa управления для обеспечения способности к прямолинейному движению указывает небольшое значение, даже если в этом состоянии подвижный контактный вывод tc секции 56g выбора возвращается к стороне нормально замкнутого неподвижного контактного вывода ta. Таким образом, значение управления для обеспечения способности к прямолинейному движению не является прерывистым, и может быть выполнено плавное переключение значения управления для обеспечения способности к прямолинейному движению.
Модификация четвертого варианта осуществления
Следует отметить, что в вышеописанном четвертом варианте осуществления сигнал Sss определения начала руления переходит в активное состояние от определения начала руления посредством секции 56a определения начала руления до определения нейтрального состояния руля 2 посредством секции 56a определения начала руления, поясняется. Тем не менее, настоящее изобретение не ограничено этим. Когда определяется состояние начала руления посредством секции 56a определения начала руления, аналогично третьему варианту осуществления, описанному выше, выводится импульсный сигнал Sss начала руления. В этом случае моностабильная схема вставляется между секцией 56a определения начала руления, которая находится в активном состоянии с момента времени, в который начало руления определяется для секции 56g выбора. Таким образом, подвижный контактный вывод tc секции 56g выбора может переключаться на сторону нормально разомкнутого неподвижного контактного вывода tb.
Помимо этого в вышеописанном четвертом варианте осуществления система 50 управления рулением состоит из аппаратных средств. Настоящее изобретение не ограничено этим. Например, секция 51 вычисления целевого угла поворота при рулении и секция SG обеспечения способности к прямолинейному движению могут, например, состоять из арифметического процессора, к примеру микрокомпьютера и т.д., и может быть выполнен процесс управления рулением, показанный на Фиг.30.
В процессе управления рулением, как показано на Фиг.30, сначала на этапе S21 считываются данные, требуемые для арифметической обработки, такие как скорость V транспортного средства, угол θs поворота при рулении, определенный посредством датчика 4 угла поворота при рулении, движущие силы TL, TR системы 71 управления движущей силой и крутящий момент Ts поворота при рулении, определенный посредством датчика 5 крутящего момента поворота при рулении. Затем процедура переходит к этапу S22. На этапе S22 арифметический процессор определяет, представляет собой текущее состояние или нет стадию начала руления для правого поворота или руления влево из состояния, в котором руль 2 удерживается в нейтральной позиции, на основе угла θs поворота при рулении. Если не представляет собой состояние начала руления, процедура переходит к этапу S23.
На этом этапе S23 арифметический процессор определяет, задан или нет флаг F управления, представляющий то, что текущее состояние представляет собой состояние управления началом руления равным "1". Если флаг F управления сбрасывается до "0", процедура переходит к этапу S24, на котором усиление Ga контура управления задается равным "1", и процедура переходит к этапу S25. На этапе S25 арифметический процессор вычисляет целевой угол δ* поворота при рулении на основе скорости V транспортного средства и угла θs поворота при рулении аналогично секции 51 вычисления целевого угла поворота при рулении, описанной выше.
Затем процедура переходит к этапу S26. На этапе S26 арифметический процессор умножает коэффициент sf подруливания за счет податливости на левые и правые движущие силы TL и TR правых и левых ходовых колес аналогично секции 52 управления углом поворота при рулении, описанной выше, чтобы вычислять смещения Δfl и Δfr (величины варьирования) управляемых колес 17FL, 17FR вследствие подруливания за счет податливости, и вычисляет значение Ac управления подруливанием за счет податливости на основе этих расчетных данных.
Затем процедура переходит к этапу S27. На этапе S27 арифметический процессор обращается к карте управления для оценки сформированного крутящего момента, показанной на Фиг.23, на основе разности ΔT движущих сил (=TL-TR) между движущими силами TL и TR левых и правых ходовых колес аналогично секции 53 дополнения способности к прямолинейному движению, описанной выше, чтобы оценивать сформированный крутящий момент Th, сформированный во время руления вследствие явления паразитного силового подруливания, вычитает этот сформированный крутящий момент Th из крутящего момента Ts поворота при рулении, чтобы вычислять стабилизирующий крутящий момент Tsa, умножает этот стабилизирующий крутящий момент Tsa на предварительно определенное усиление Ksa, чтобы вычислять значение Asa управления стабилизирующим крутящим моментом.
Затем процедура переходит к этапу S28. На этапе S28 арифметический процессор вычисляет значение Adis компенсации внешних возмущений на основе угла θmo вращения актуатора 8 рулевого управления, тока imr электромотора, определенного посредством секции 61 определения тока электромотора, и крутящего момента Ts поворота при рулении аналогично секции 54 компенсации внешних возмущений, описанной выше.
Затем процедура переходит к этапу S29. На этапе S29 арифметический процессор вычисляет целевой угол δ*a поворота при рулении после суммирования посредством суммирования целевого угла δ* поворота при рулении со значением усиления Ga контура управления, на которое умножается значение суммирования значения Ac управления подруливанием за счет податливости, значения Asa управления стабилизирующим крутящим моментом и значения Adis компенсации внешних возмущений в соответствии со следующим уравнением (4).
δ*a=δ*+Ga(Ac+Asa+Adis)... (4)
Затем процедура переходит к этапу S30. На этапе S30 арифметический процессор выводит вычисленный целевой угол δ*a поворота при рулении после суммирования в секцию 58 вычисления отклонения угла поворота при рулении на Фиг.29, и процедура возвращается к этапу S21.
Помимо этого на этапе S22, когда результат определения на этапе S22 указывает состояние начала руления, процедура переходит к этапу S31, на котором флаг F управления задается равным "1", и процедура переходит к этапу S32. Кроме того, когда результат определения на этапе S23 указывает, что флаг F управления задается равным "1", процедура переходит непосредственно к этапу S32.
На этапе S32 арифметический процессор определяет, находится или нет текущее время после того, как истекло предварительно определенное время задержки (например, 0,1 секунды). Когда время задержки не истекло ("Нет") на этапе S32, процедура переходит к этапу S33. После того как усиление Ga контура управления задается равным "0" на этапе S33, процедура переходит к этапу S25. Если результат определения на этапе S32 указывает, что прошло предварительно определенное время задержки, процедура переходит от этапа S32 к этапу S34. На этапе S34, усиление Ga контура управления задается равным "0,8", и процедура переходит к этапу S35.
На этом этапе S35 арифметический процессор определяет, указывает или нет угол θs поворота при рулении, определенный посредством датчика 4 угла поворота при рулении, нейтральную позицию руля 2. Если результат определения указывает, что руль 2 размещается в нейтральной позиции на этапе S35, процедура переходит к этапу S36, чтобы сбрасывать флаг F управления до "0", и процедура переходит к этапу S25. Если "Нет" на этапе S35 (не нейтральная позиция), процедура переходит непосредственно к этапу S25.
Когда даже в процессе управления рулением, показанном на Фиг.30, текущее состояние не представляет собой состояние начала руления, в котором руление вправо или влево начинается из состояния, в котором руль 2 удерживается в нейтральной позиции, усиление Ga контура управления задается равным "1". Управление рулением выполняется на основе значения δa управления для обеспечения способности к прямолинейному движению, которое является суммированием значения Ac управления подруливанием за счет податливости, значения Asa управления стабилизирующим крутящим моментом и значения Adis компенсации внешних возмущений с целевым углом δ*a поворота при рулении, и обеспечивает способность к прямолинейному движению узла 1B подвески.
С другой стороны, когда текущее состояние представляет собой состояние начала руления, в котором руление вправо или влево руля 2 начинается из состояния, в котором руль 2 удерживается в нейтральной позиции, усиление Ga контура управления задается равным "0" до тех пор, пока не прошло предварительно установленное время задержки. Следовательно, только целевой угол δ*a поворота при рулении выводится в секцию 58 вычисления отклонения угла поворота при рулении. Таким образом, электромотор 8a рулевого управления, составляющий актуатор 8 рулевого управления, вращательно приводится в действие. Следовательно, поскольку характеристика быстрого отклика при рулении самого узла подвески задается как начальная характеристика отклика при рулении, может быть получена характеристика быстрого отклика при рулении.
После этого, если прошло время задержки, усиление Ga контура управления задается равным "0,8". Следовательно, электромотор 8a рулевого управления, составляющий актуатор 8 рулевого управления, вращательно приводится в действие посредством целевого угла δ*a поворота при рулении после суммирования (который является суммированием целевого угла δ* поворота при рулении с усилением Ga контура управления, умноженным на сумму значения Ac управления подруливанием за счет податливости, значения Asa управления стабилизирующим крутящим моментом и значения Adis компенсации внешних возмущений). Следовательно, подавляется характеристика быстрого отклика при рулении узла подвески согласно управлению для обеспечения способности к прямолинейному движению посредством системы SBW управления по проводам и может быть получена идеальная характеристика отклика при рулении, показанная посредством характеристической линии L1 по Фиг.25(a).
В такой обработке на Фиг.30 процесс этапа S25 соответствует секции 51 вычисления целевого угла поворота при рулении, процесс этапа S26 соответствует секции 52 управления углом поворота при рулении, процесс этапа S27 соответствует секции 53 дополнения способности к прямолинейному движению и процесс этапа S28 соответствует секции 54 компенсации внешних возмущений. Помимо этого процессы этапов S24-S28 и процессы этапов S25-S29 соответствуют секции SG обеспечения способности к прямолинейному движению, и процессы этапов S22, S23 и S31-S29 соответствуют секции 56 управления задержкой, и процессы этапов S21-S37 соответствуют секции SRS задания характеристики отклика при рулении.
Модификации третьего и четвертого предпочтительных вариантов осуществления
Следует отметить, что когда в вышеописанных третьем и четвертом вариантах осуществления руление вправо или влево начинается из состояния, в котором руль 2 находится в нейтральной позиции, прекращается управление для обеспечения способности к прямолинейному движению, при котором значение δa управления для обеспечения способности к прямолинейному движению суммируется с целевым углом δ* поворота при рулении. Однако настоящее изобретение не ограничено вышеописанным предметом. Как показано на Фиг.31, может быть подготовлен такой процесс регулирования характеристики отклика при рулении, в котором арифметический процессор определяет, выполняется или нет управление для обеспечения способности к прямолинейному движению, при котором значение δa управления для обеспечения способности к прямолинейному движению суммируется с целевым углом δ* поворота при рулении, в соответствии с частотой руления, чтобы регулировать характеристику отклика при рулении.
Вышеописанный процесс регулирования характеристики отклика при рулении описывается следующим образом. Другими словами, как показано на Фиг.31, на этапе S41 считываются данные, требуемые для вычисления, к примеру, скорость V транспортного средства, угол θs поворота при рулении, угол θmo вращения, движущие силы TL, TR и т.д. Затем на этапе S42 арифметический процессор определяет частоту F руления на основе угла θs поворота при рулении, выведенного из датчика 4 угла поворота при рулении. На этапе S43 арифметический процессор определяет то, выше или нет определенная частота F руления предварительно установленного порогового значения Fth частоты (например, 2 Гц).
Если результат определения на этапе S43 указывает, что F≥Fth, арифметический процессор определяет, что требуется характеристика быстрого отклика при рулении, и процедура переходит к этапу S44. На этапе S44 арифметический процессор вычисляет целевой угол δ* поворота при рулении, и процедура переходит к этапу S45, на котором целевой угол δ* поворота при рулении выводится в секцию 58 вычисления отклонения угла поворота при рулении, описанную выше, и процедура возвращается к этапу S41.
С другой стороны, если результат определения на этапе S43 указывает, что F<Fth ("Нет"), арифметический процессор определяет, что не требуется характеристика быстрого отклика при рулении и требуется стабильность руления (маневренность), и процедура переходит к этапу S46. На этапе S46 арифметический процессор вычисляет целевой угол δ* поворота при рулении. На этапе S47 арифметический процессор вычисляет значение Ac управления подруливанием за счет податливости, и на этапе S48 арифметический процессор вычисляет значение Asc управления стабилизирующим крутящим моментом.
Затем процедура переходит к этапу S49. На этапе S49 арифметический процессор вычисляет значение Adis компенсации внешних возмущений. На этапе S50 арифметический процессор суммирует между собой вычисленный целевой угол δ* поворота при рулении, значение Ac управления подруливанием за счет податливости, значение Asa управления стабилизирующим крутящим моментом и значение Adis компенсации внешних возмущений, чтобы вычислять целевой угол δ*a поворота при рулении после суммирования, и процедура переходит к этапу S51. На этапе S51 арифметический процессор выводит целевой угол δ*a поворота при рулении после суммирования в секцию 58 вычисления отклонения угла поворота при рулении на Фиг.22, и процедура возвращается к этапу S41.
Когда при обработке характеристики отклика при рулении частота F руления, чтобы управлять рулем 2, представляет собой низкую частоту, меньшую порогового значения Fth частоты, выполняется такое определение, что не требуется характеристика быстрого отклика, но требуется маневренность (руление) и стабильность. Затем управление рулением выполняется с использованием целевого угла δ*a поворота при рулении после суммирования, который является суммированием значения δa управления для обеспечения способности к прямолинейному движению с целевым углом δ* поворота при рулении, так что может быть выполнено идеальное управление рулением. Помимо этого, в случае если частота F руления выше порогового значения Fth частоты, арифметический процессор определяет, что требуется характеристика быстрого отклика, и может быть выполнено управление углом поворота при рулении на основе характеристики отклика при рулении, которую имеет сам узел 1B подвески.
В этом случае арифметический процессор определяет, должен или нет целевой угол δ* поворота при рулении быть скорректирован в соответствии с частотой руления. Следовательно, может задаваться оптимальная характеристика отклика в соответствии с состоянием руления.
Следует отметить, что в этом альтернативном случае, если F<Fth, такое усиление, заданное равным значению в диапазоне от 0 до 1 в соответствии со значением частоты F руления, умножается на значение δa управления для обеспечения способности к прямолинейному движению, с тем чтобы предоставлять модификацию степени коррекции способности к прямолинейному движению. Таким образом, может быть выполнено более точное управление характеристикой отклика.
Кроме того, настоящее изобретение не ограничено применением к автомобильному транспортному средству и может применяться к другим транспортным средствам, имеющим систему рулевого управления.
Перечень ссылочных позиций
1 - автомобильное транспортное средство, 1A - кузов транспортного средства, 1B - узел подвески, 2 - руль, 3 - ось поворота при рулении на входной стороне, 4 - датчик угла поворота при рулении, 5 - датчик крутящего момента поворота при рулении, 6 - актуатор силы реакции при рулении, 7 - датчик угла поворота актуатора силы реакции при рулении, 8 - актуатор рулевого управления, 9 - датчик угла поворота актуатора рулевого управления, 10 - ось поворота при рулении на выходной стороне, 11 - датчик крутящего момента поворота при рулении, 12 - ведущая шестерня, 13 - датчик угла поворота ведущей шестерни, 14 - ось зубчатой рейки, 15 - поперечная рулевая тяга, 17FR, 17FL, 17RR, 17RL - ходовые колеса, 21 - секция получения параметров состояния транспортного средства, 24FR, 24FL, 24RR, 24RL - датчики скорости ходовых колес, 26 - модуль схемы управления/приведения в действие, 27 - механическое дублирующее средство, 32 - ось, 33 - стакан оси, 34 - пружинный элемент, 37 - первая тяга, 38 - вторая тяга, 40 - амортизатор, 41 - стабилизатор, 50 - секция управления рулением, 51 - секция вычисления целевого угла поворота при рулении, 52 - секция управления углом поворота при рулении, 53 - секция компенсации способности к прямолинейному движению, 54 - секция компенсации внешних возмущений, 55 - сумматор, 56 - секция управления задержкой, 56a - секция определения начала руления, 56g - секция выбора, 56h - секция регулировки усиления, 57 - сумматор, 58 - секция вычисления отклонения угла поворота при рулении, 59 - секция управления электромотором рулевого управления, 60 - секция вычисления отклонения тока, 61 - секция определения тока электромотора, 62 - секция управления током электромотора, 63 - система управления актуатора, 81 - элемент оси, 84 - нижний рычаг, 86 - полуось, 90 - подрамник, 91 - секция прикрепления рычага, 101 - элемент оси, 102 - стойка, 103 - амортизатор, 105 - нижний рычаг, 108 - поперечная рулевая тяга, 109 - ось зубчатой рейки, 111 - секция компенсации способности к прямолинейному движению, SS - механизм рулевого управления, SM - механизм рулевого управления, EP - система электрического усилителя рулевого управления, SW - руль, SSi - ось поворота при рулении на входной стороне, SSo - датчик угла поворота при рулении, TS - датчик крутящего момента поворота при рулении, EA - электрический актуатор рулевого управления, RS - датчик угла вращения актуатора, CT - система управления рулением, PC - секция управления усилителем рулевого управления, SG - секция обеспечения способности к прямолинейному движению, CP - секция получения параметров состояния транспортного средства, PG - ведущая шестерня, LS - ось зубчатой рейки, TR - поперечная рулевая тяга, WFR, WFL, WRR, WRL - ходовые колеса, WSFR, WSFL, WSFL, WSRL - датчики скорости ходовых колес
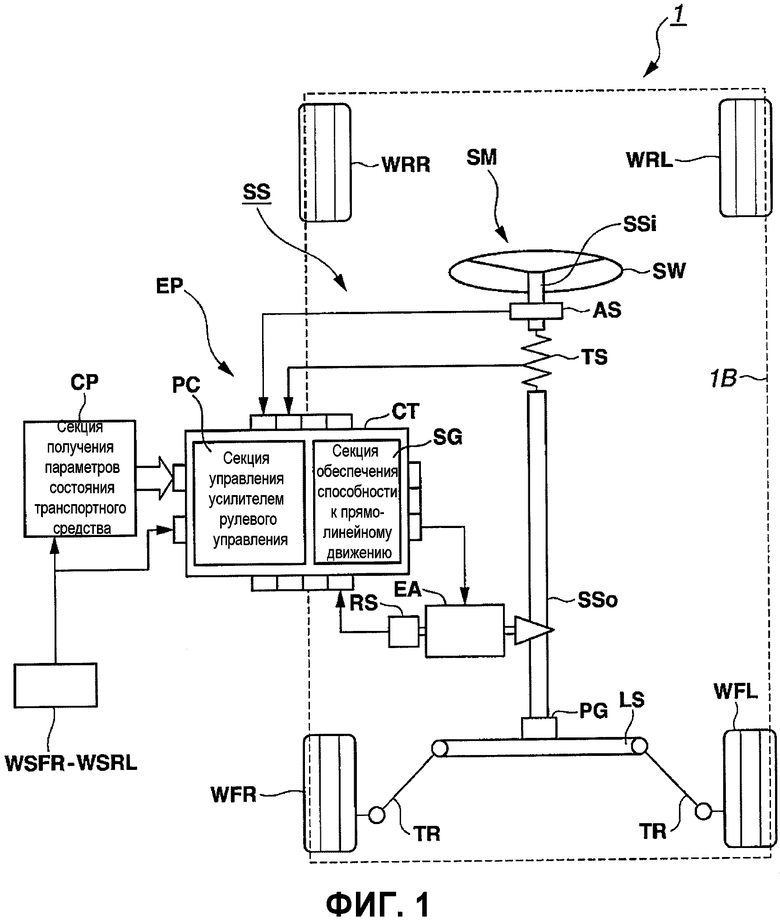
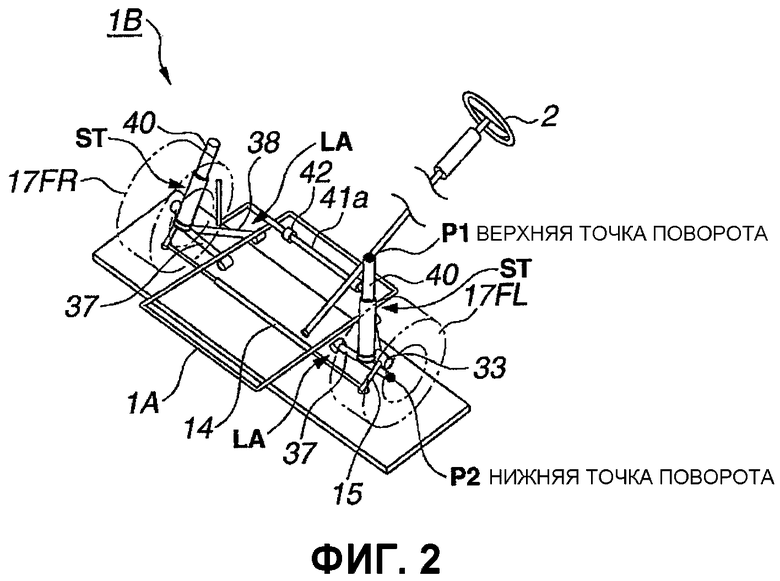
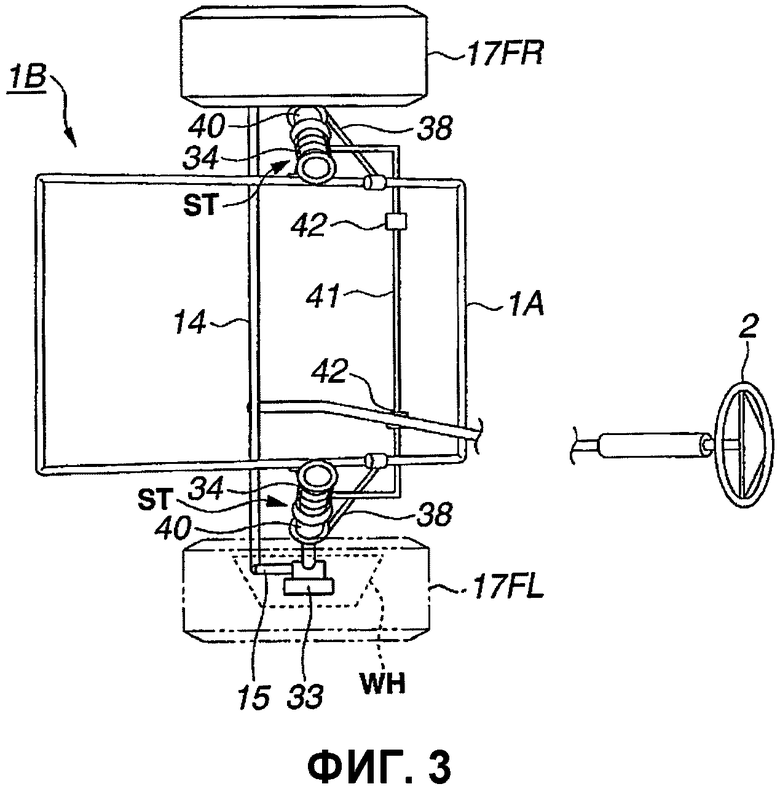
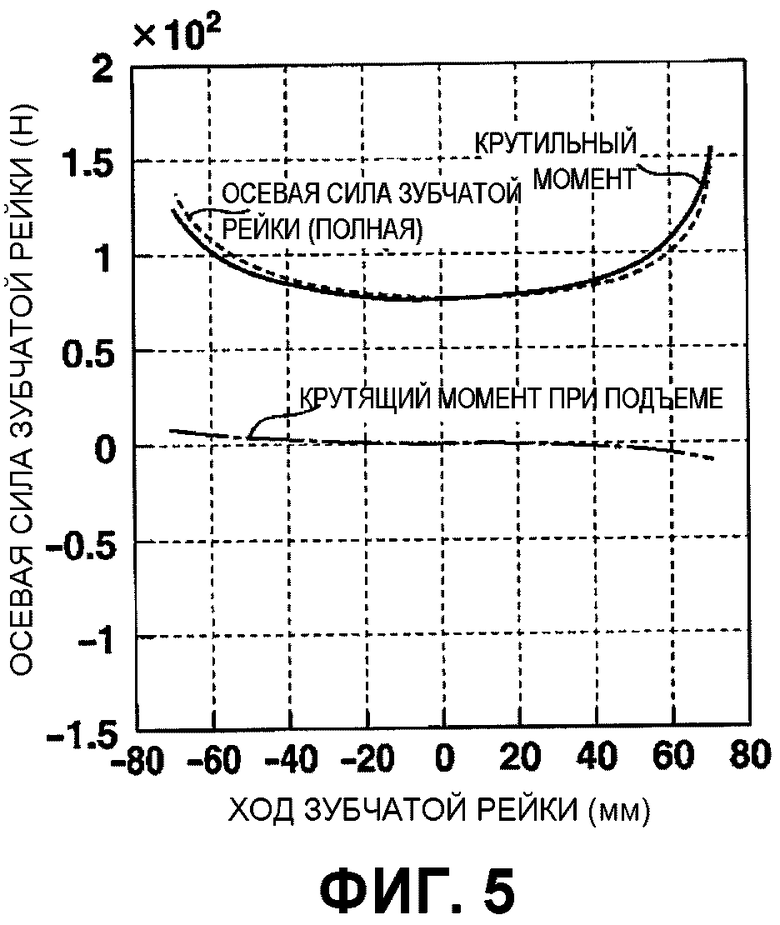
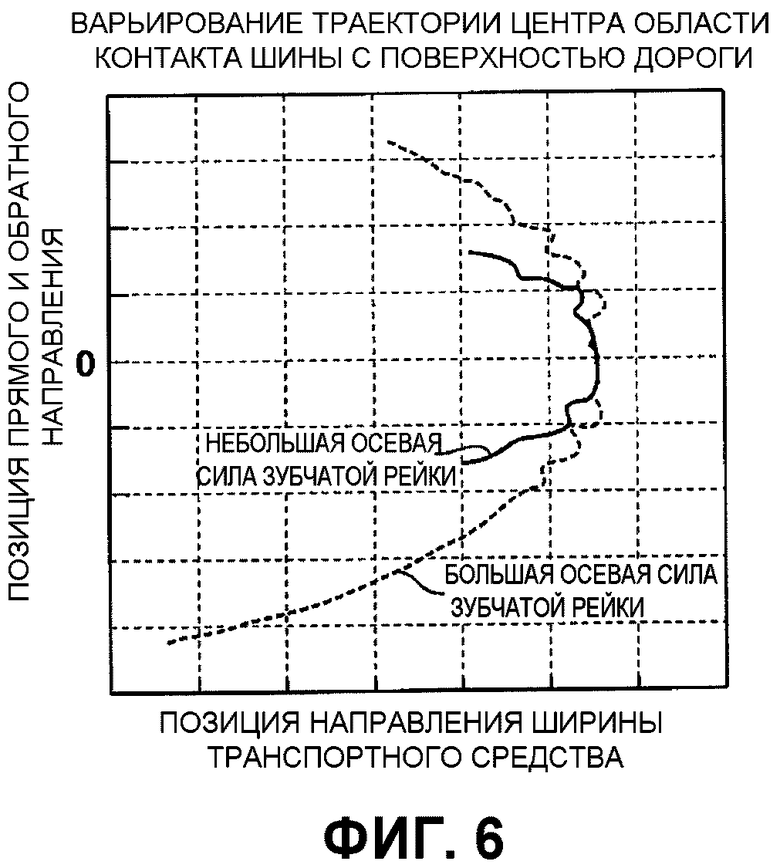
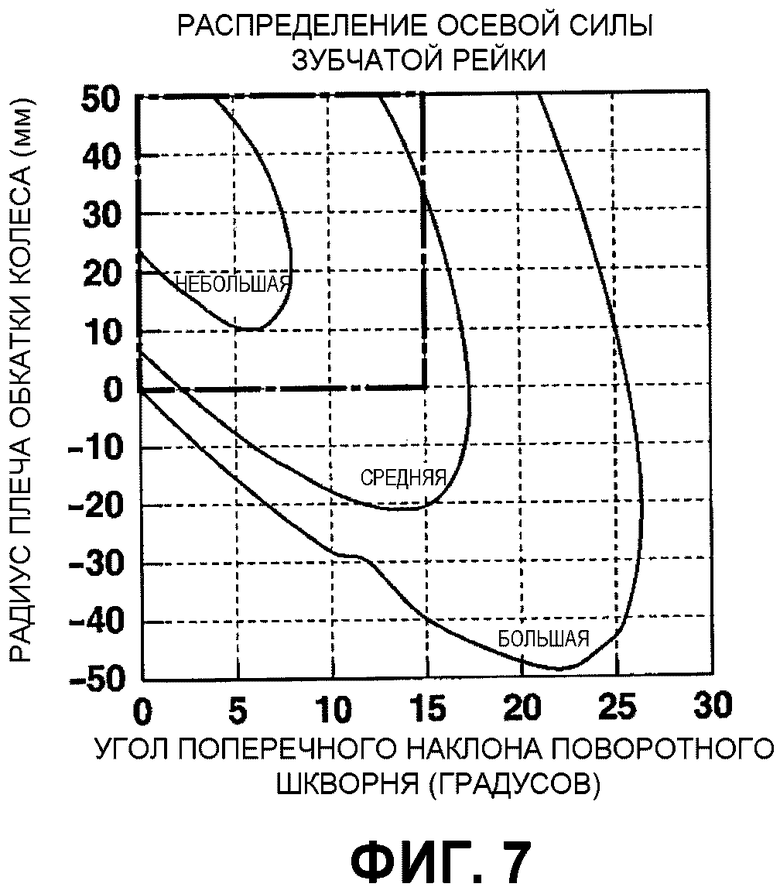
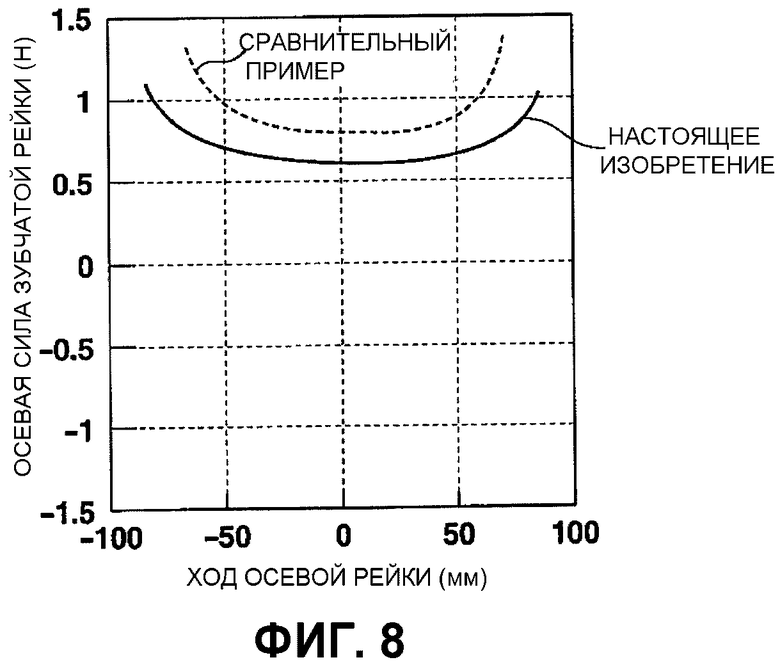
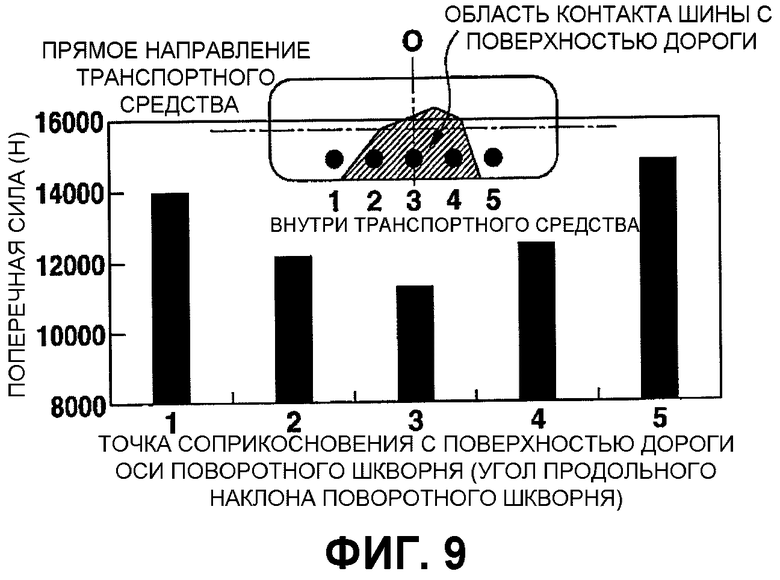
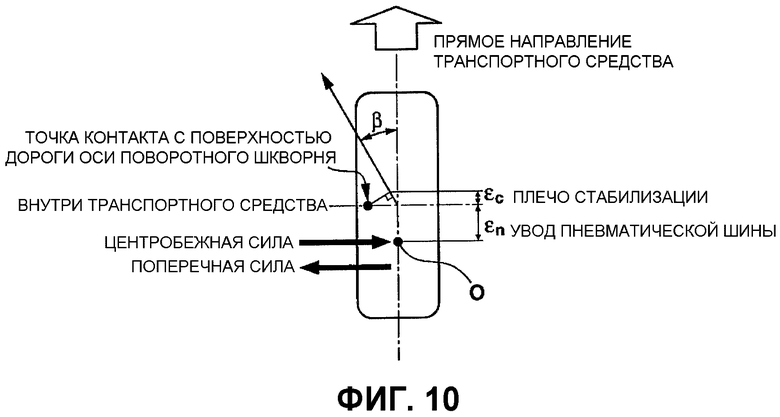
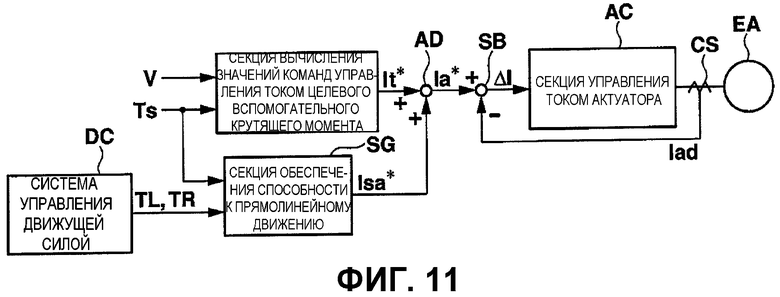
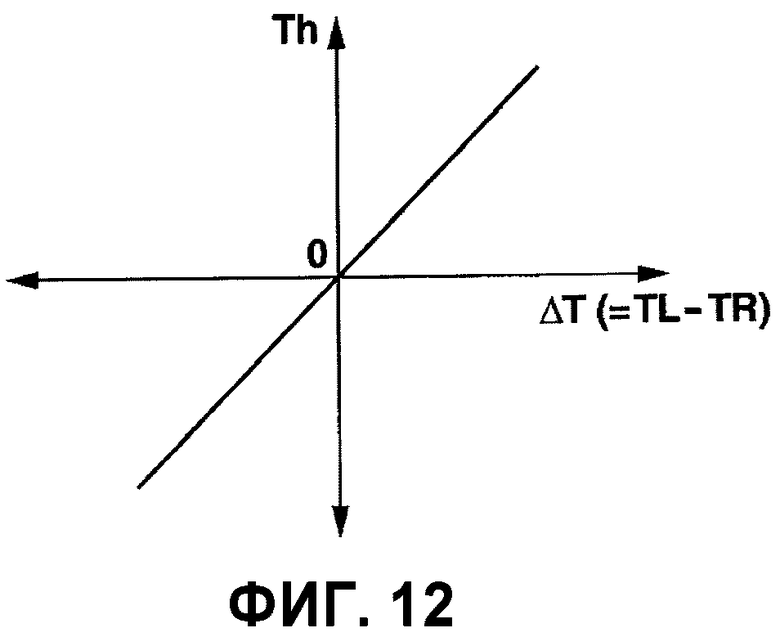
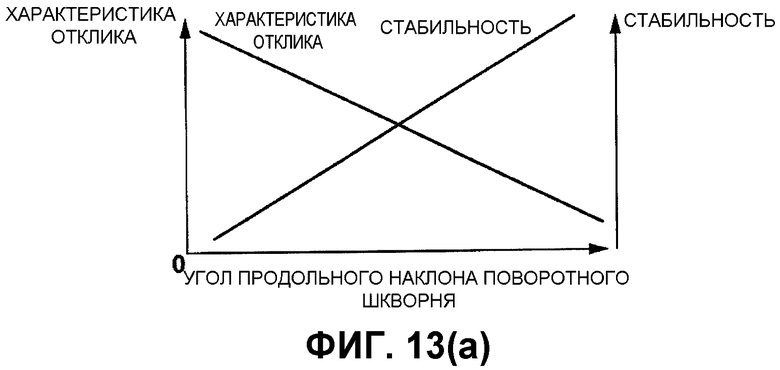
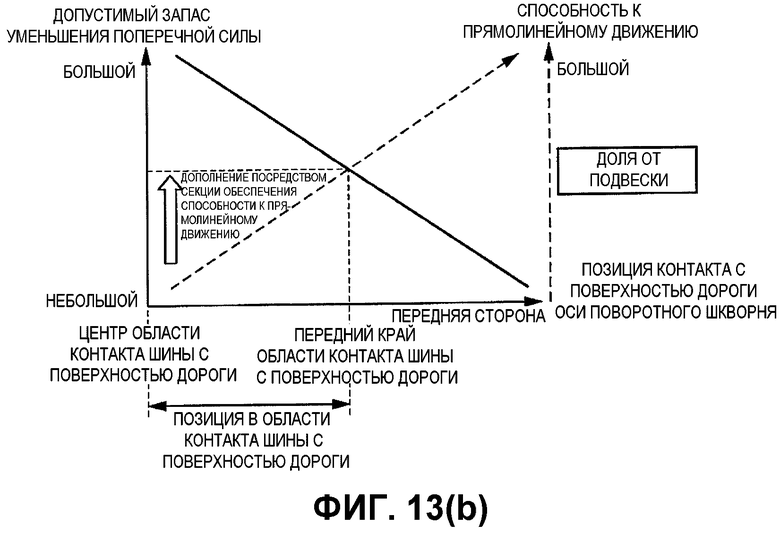
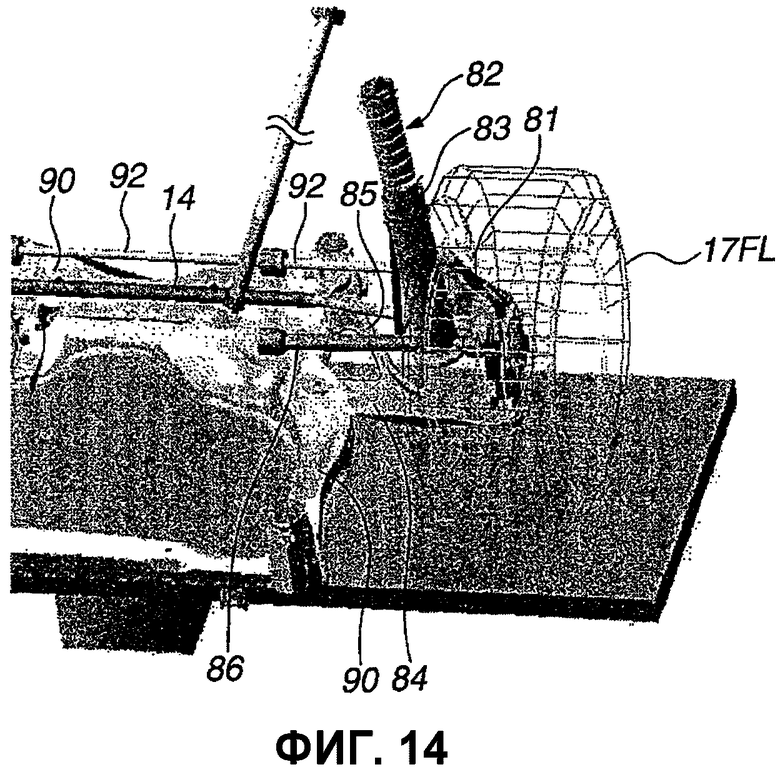
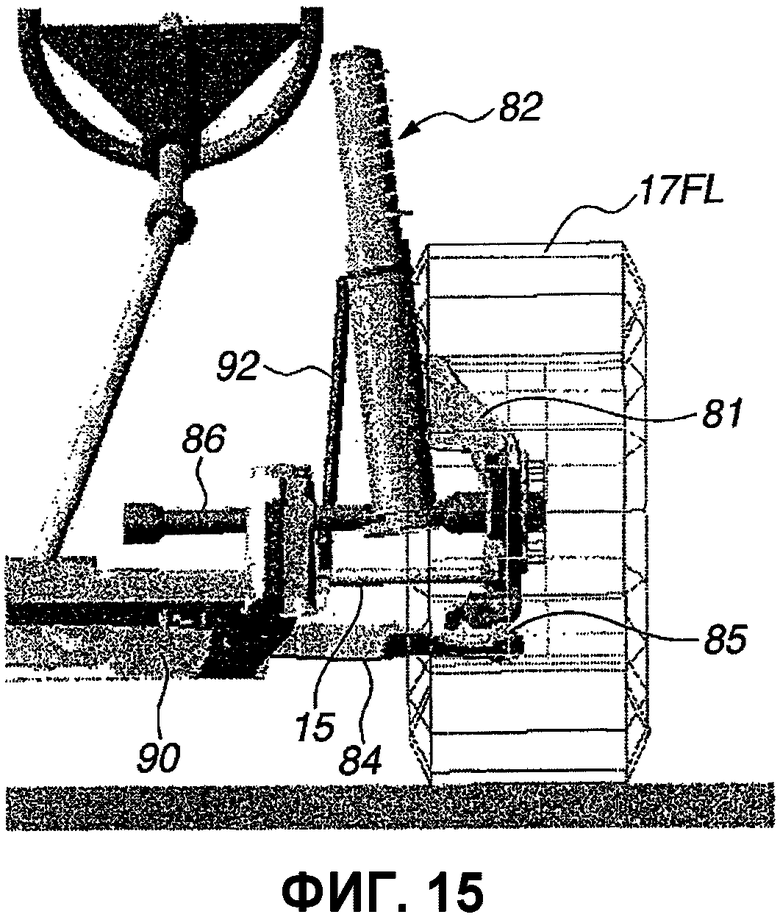
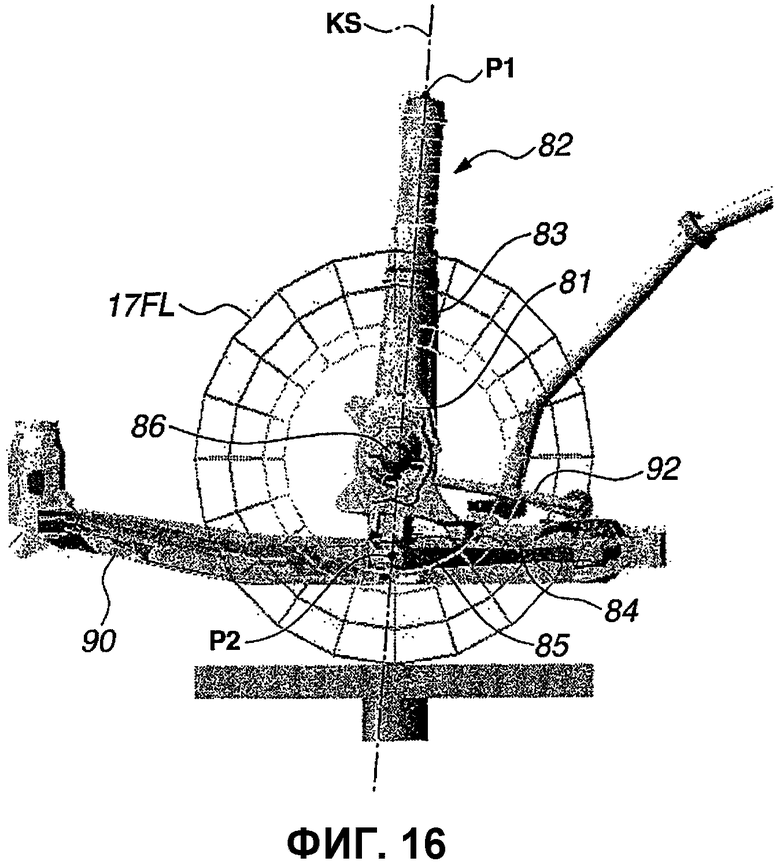
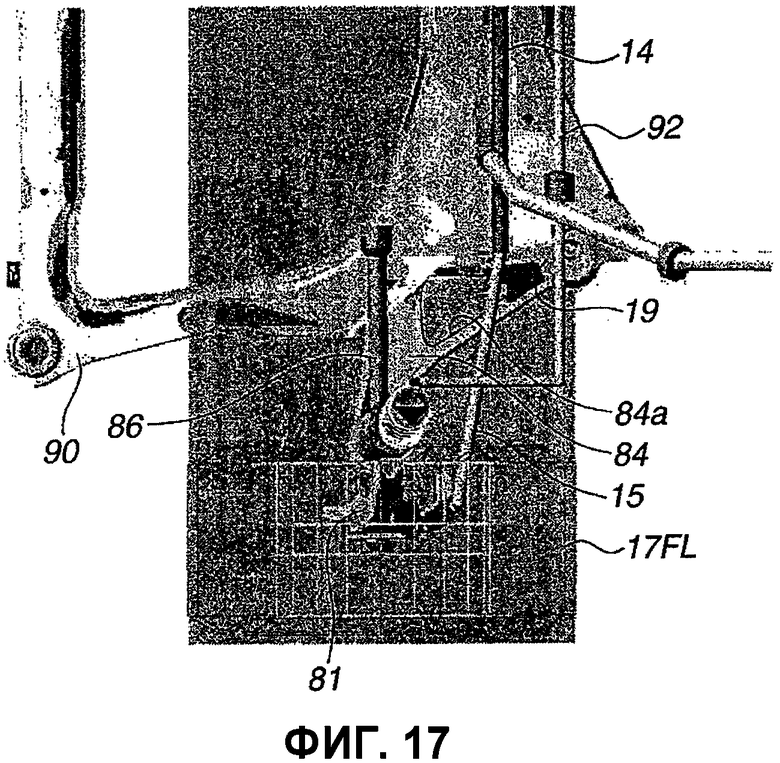
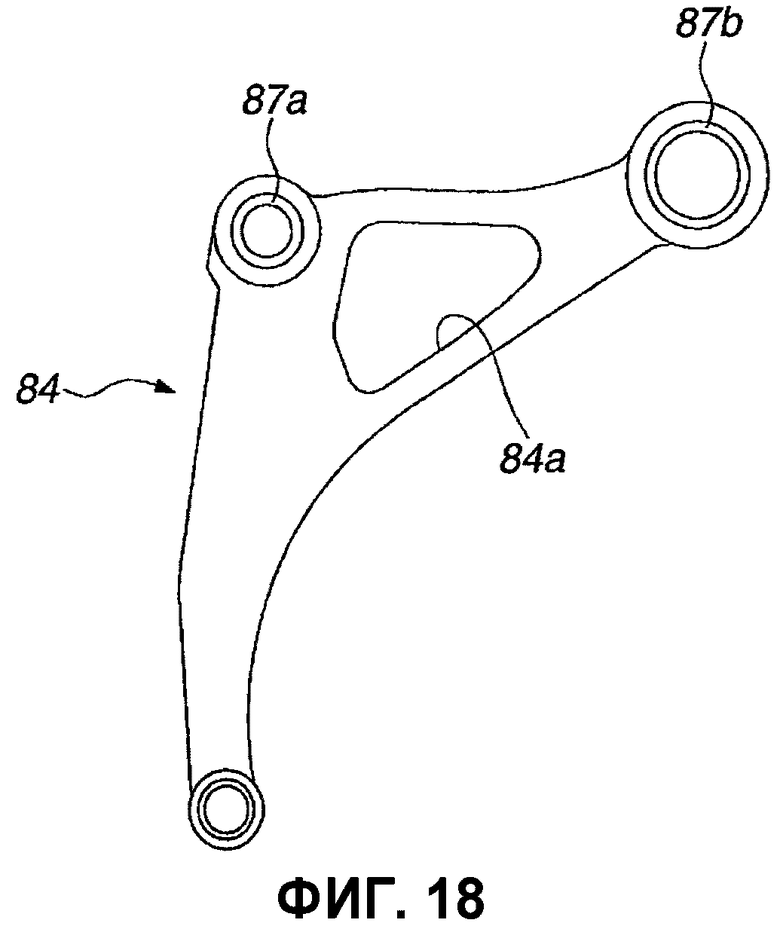
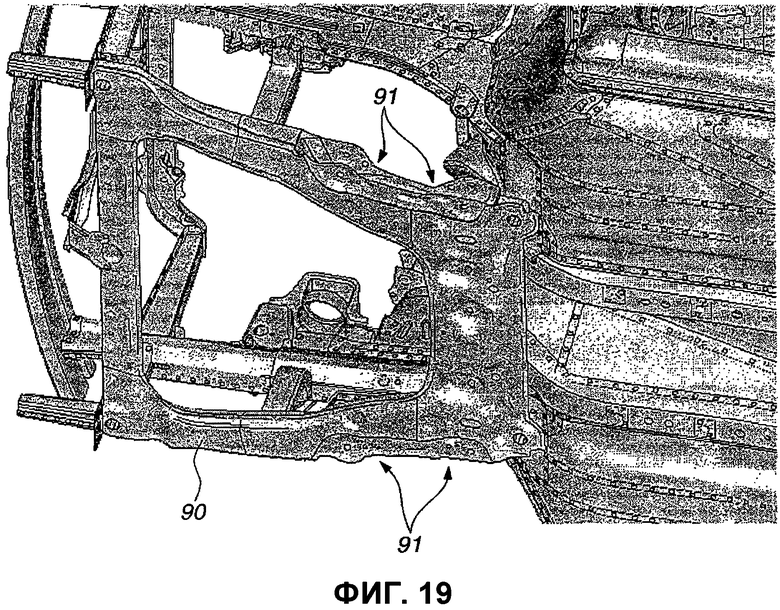
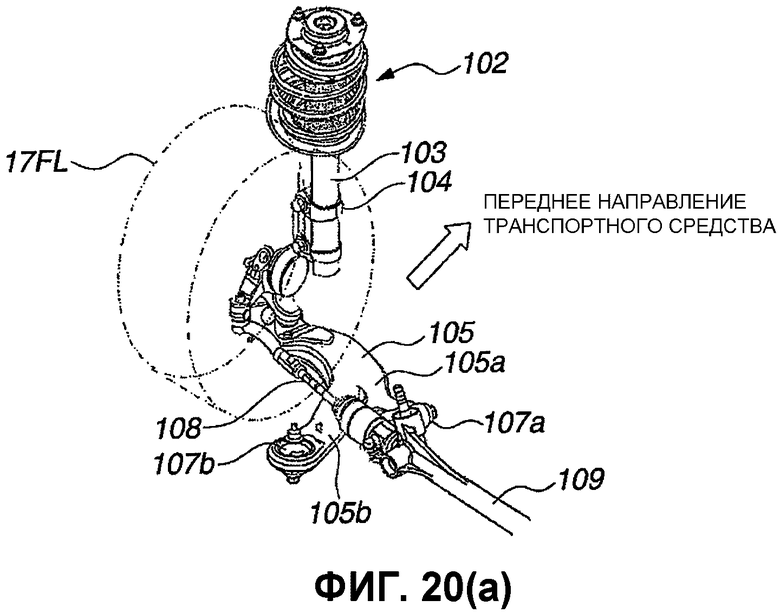
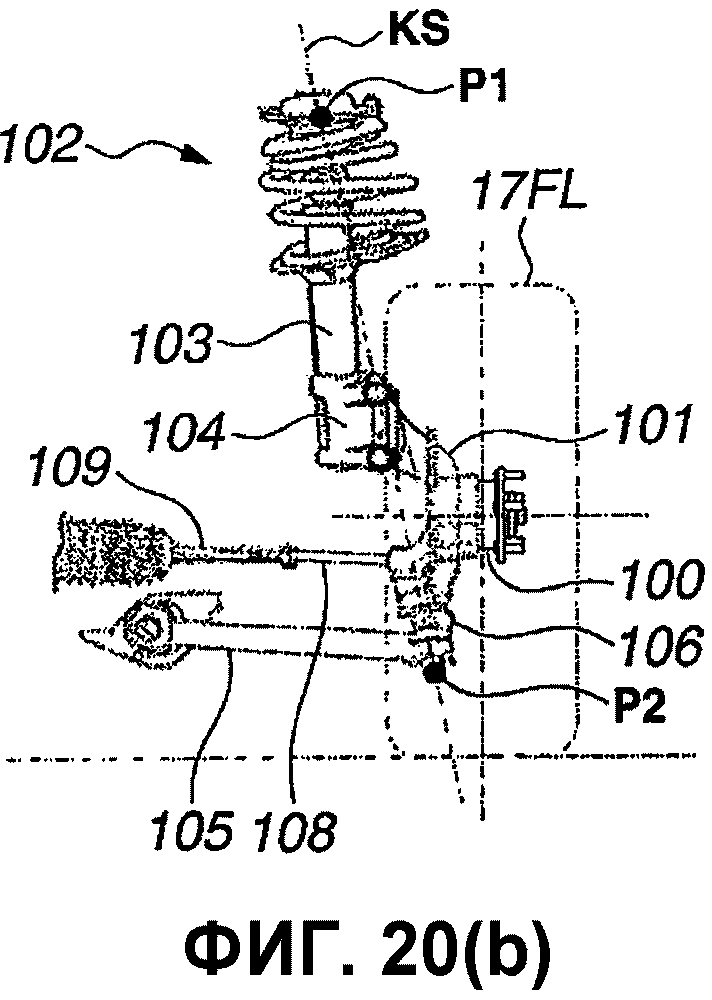
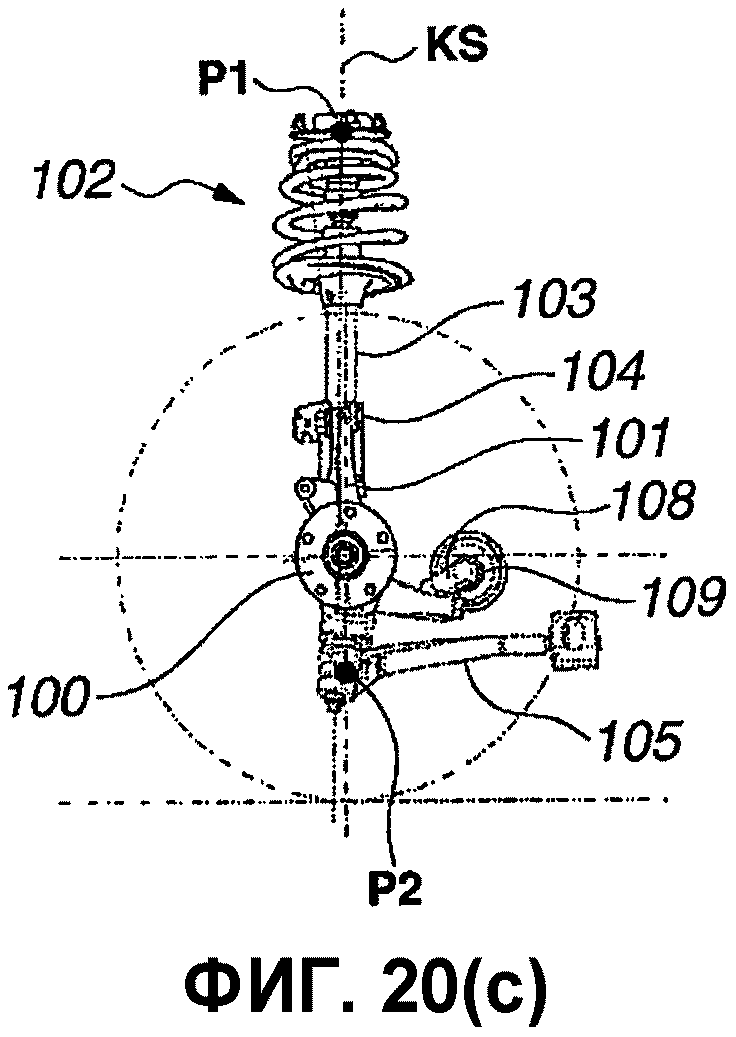
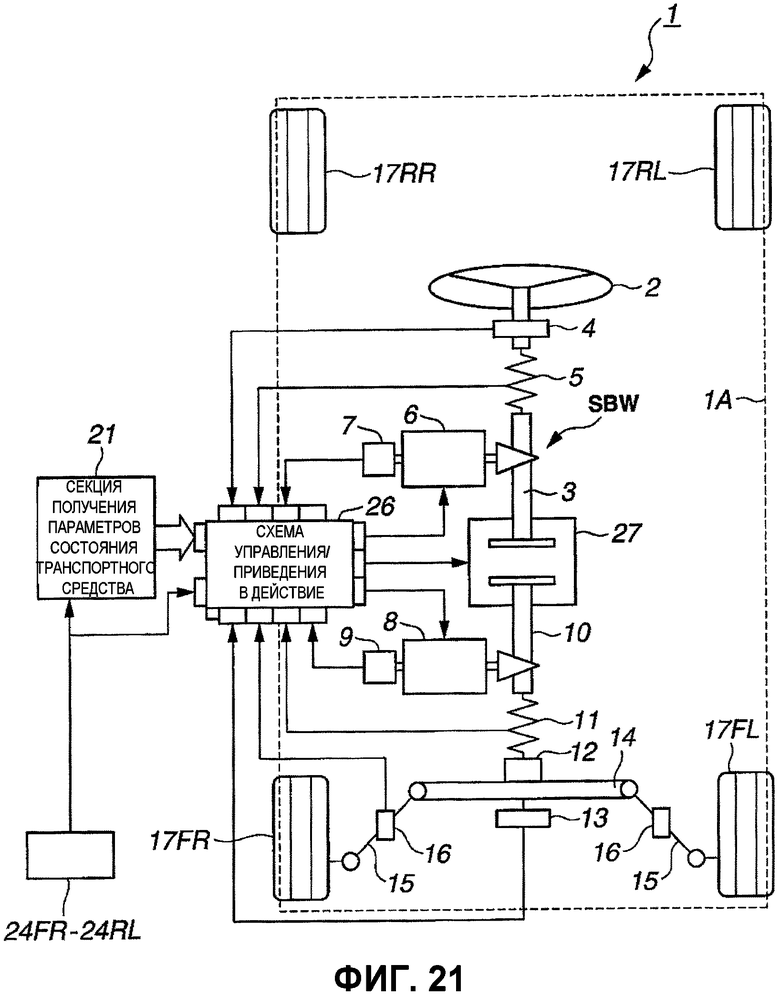
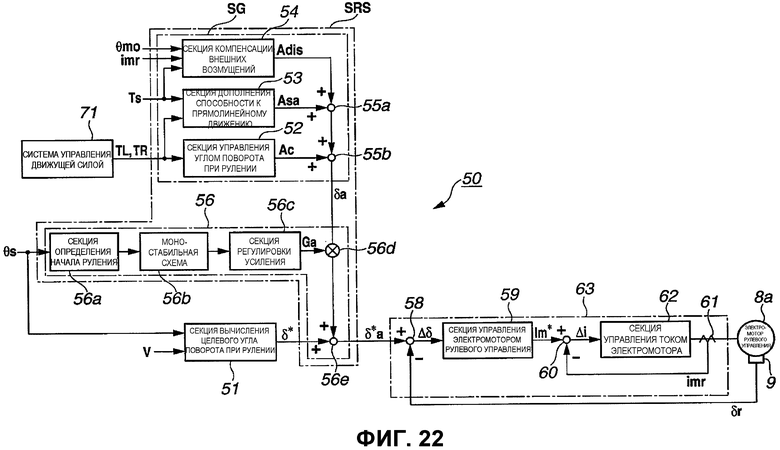
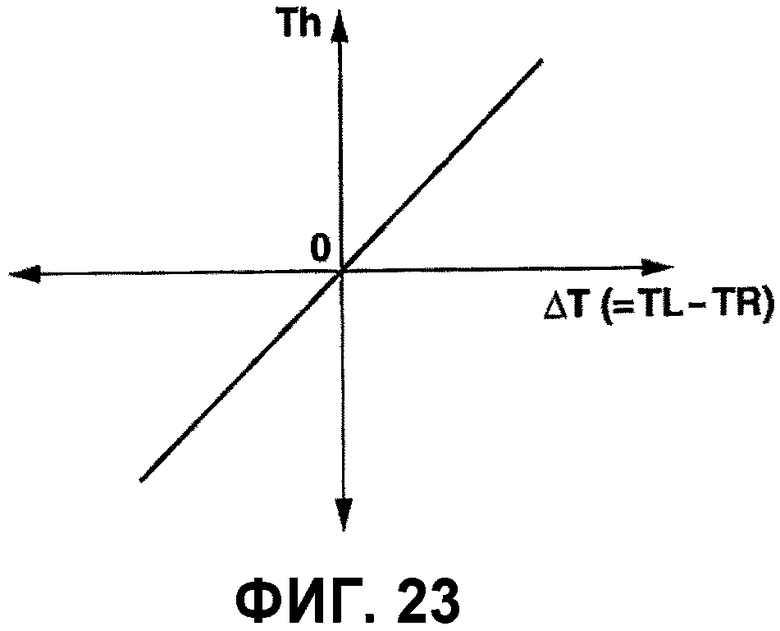

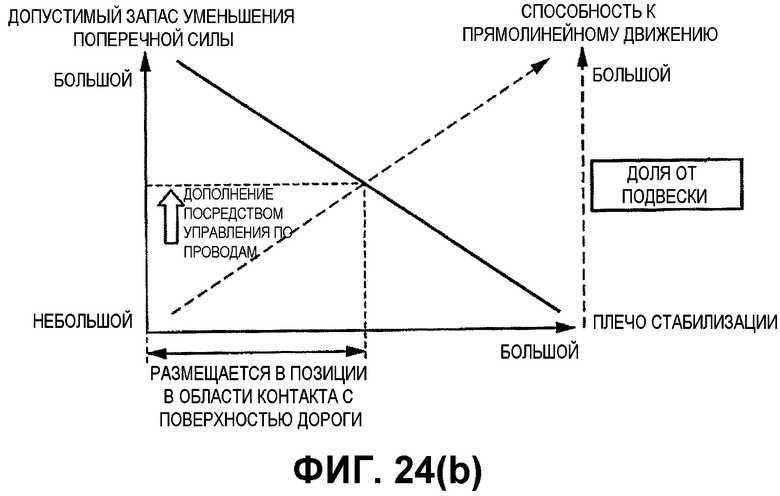
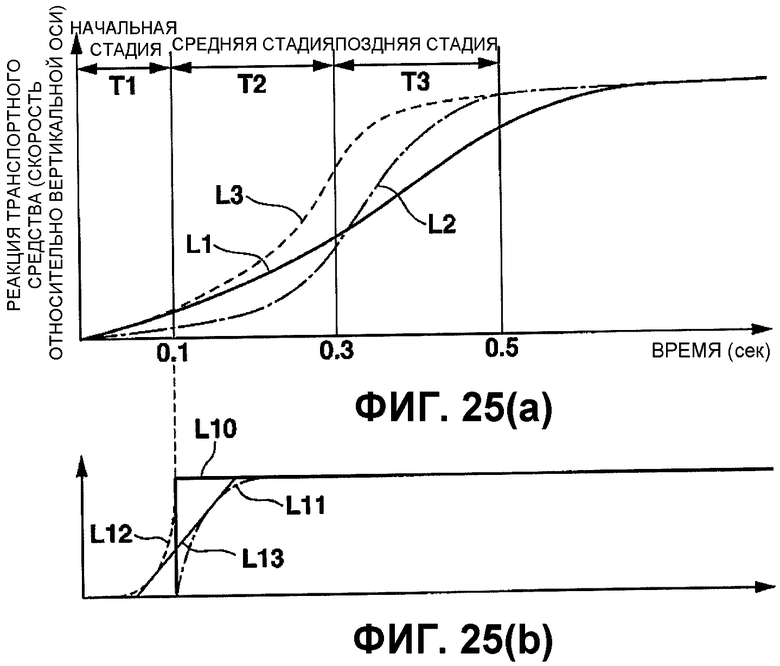
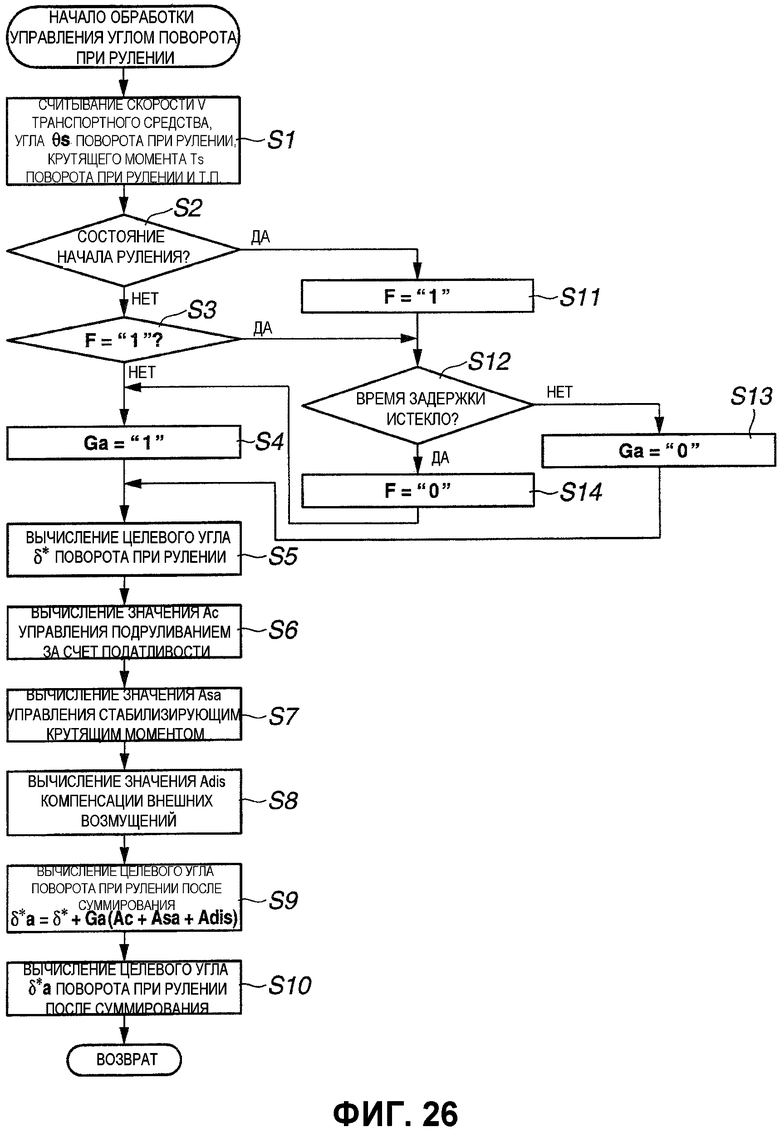
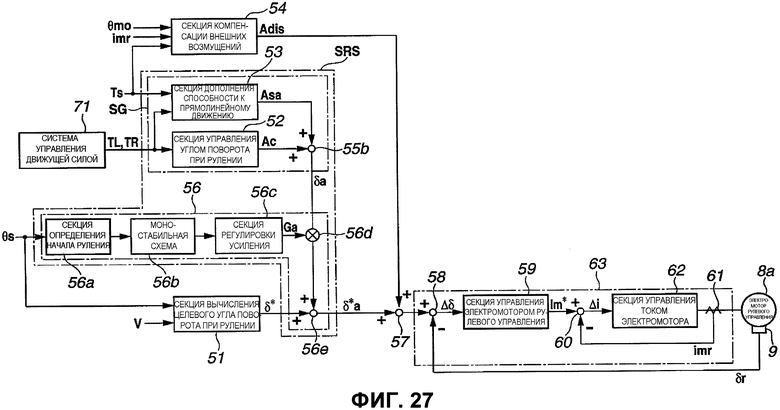
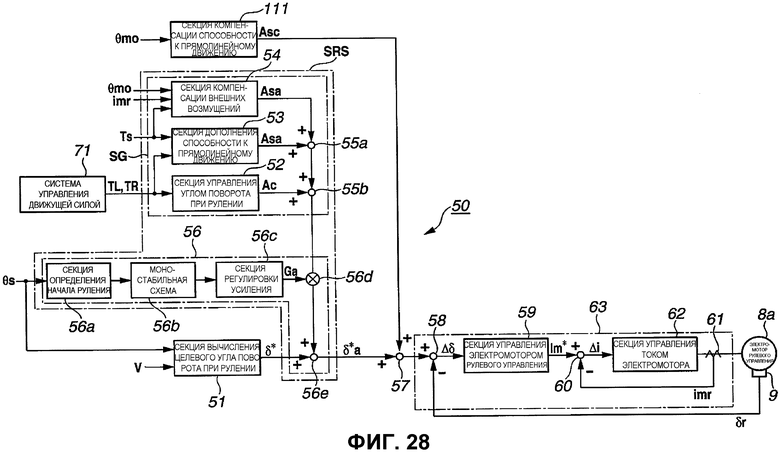
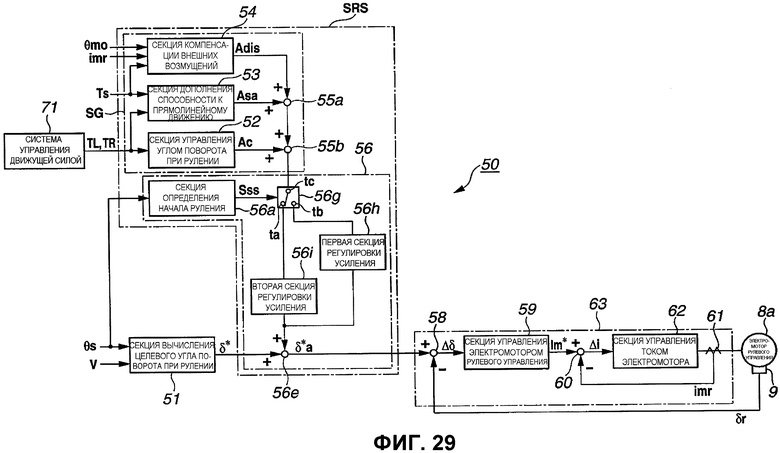
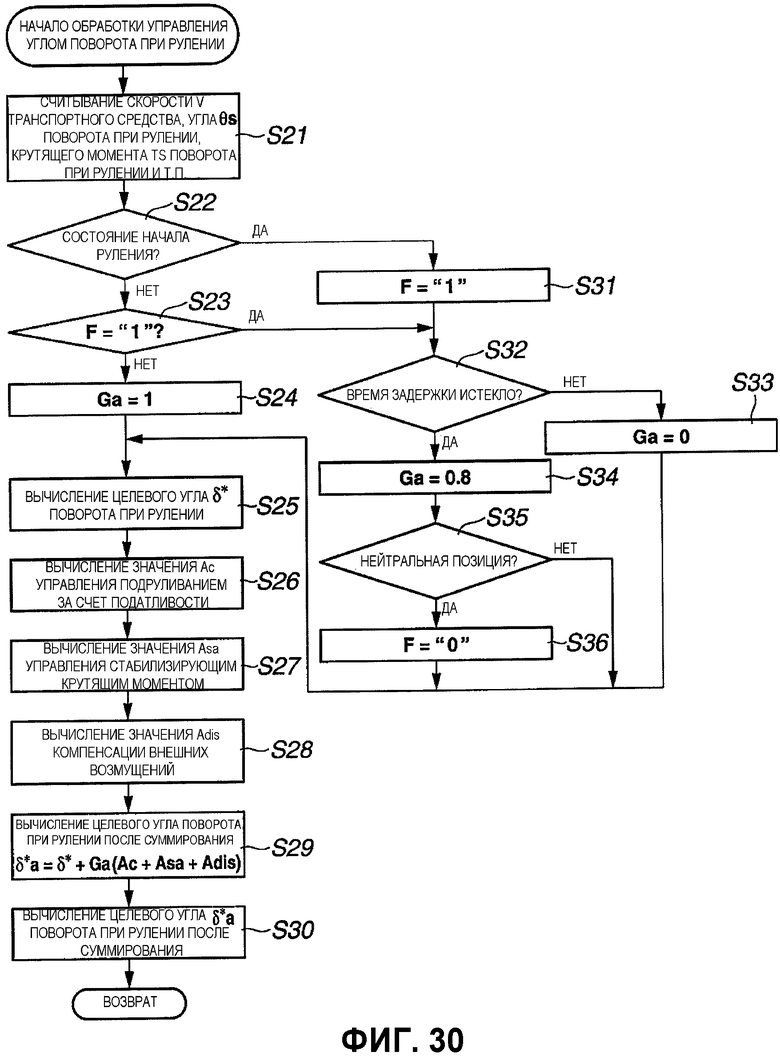
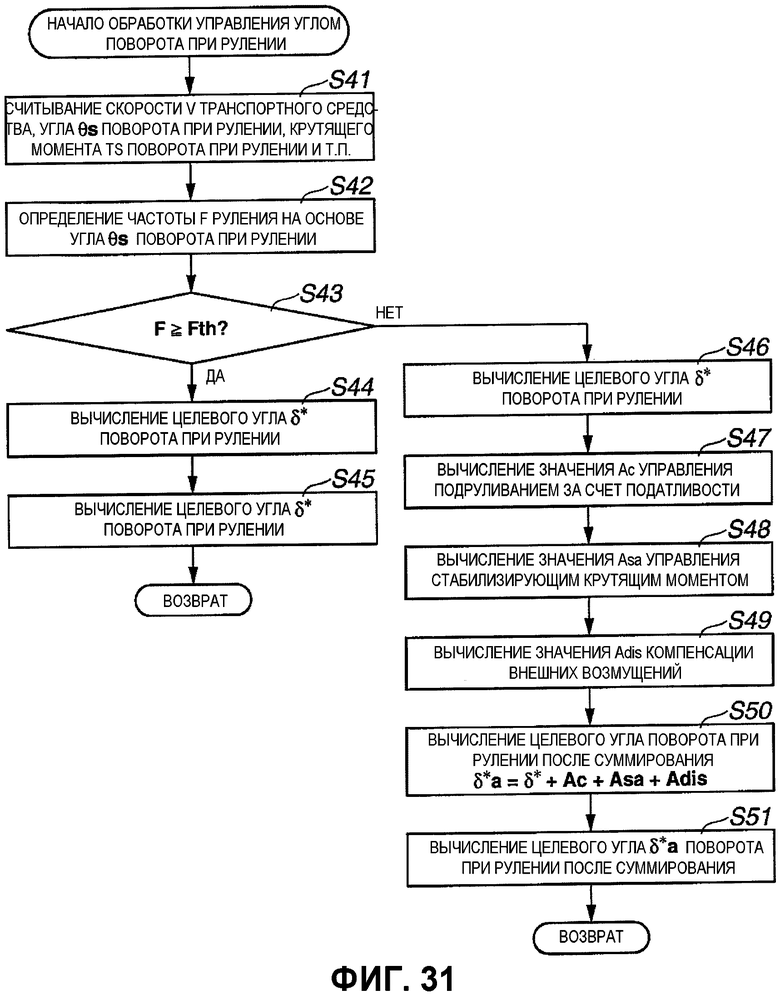
Группа изобретений относится к вариантам выполнения транспортного средства и вариантам способа управления рулением транспортного средства. Транспортное средство включает в себя: систему управления по проводам, определяющую смещение руля и смещающую рулевую зубчатую рейку, управляющую управляемыми колесами на основе результата определения смещения, и узел подвески, подвешивающий управляемые колеса. Узел подвески включает в себя: механизмы ступиц колес. Каждый механизм ступицы колеса поддерживает колесо с шиной, к которому прикрепляется шина, и множество элементов тяг, поддерживающих механизмы ступиц колес на кузове транспортного средства. Ось поворотного шкворня, проходящая через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, задается таким образом, что она проходит через область контакта шины с поверхностью дороги в нейтральной позиции руля. Улучшается маневренность и стабильность узла подвески для транспортного средства. 10 н. и 21 з.п. ф-лы, 31 ил.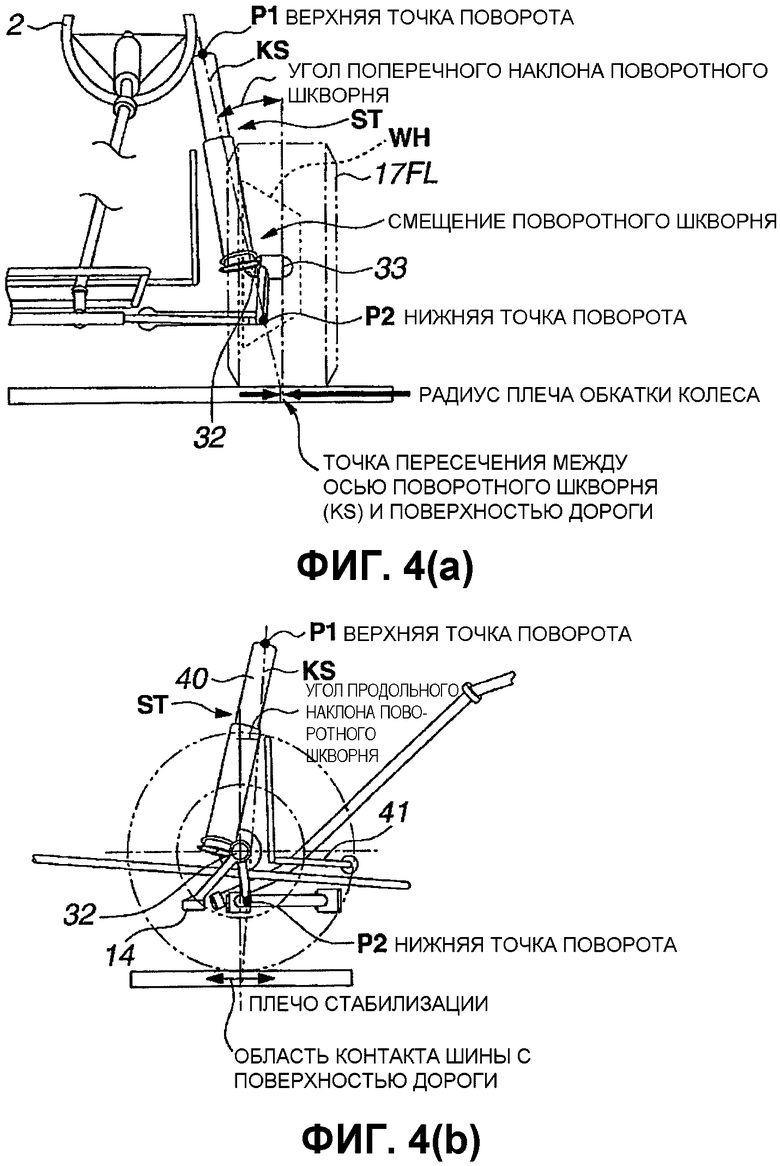
1. Транспортное средство, содержащее:
систему управления рулением, которая приводит в действие актуатор в соответствии с управляемым состоянием руля, чтобы управлять управляемыми колесами; и
узел подвески, который поддерживает управляемые колеса на кузове транспортного средства, причем узел подвески включает в себя: механизм ступицы колеса, поддерживающий колесо для шины, к которому прикрепляется шина; и множество элементов тяг, поддерживающих механизм ступицы колеса на кузове транспортного средства,
причем ось поворотного шкворня, проходящая через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, задается таким образом, что она проходит в области контакта шины в нейтральной позиции руля, при этом система управления рулением приводит в действие актуатор для формирования восстанавливающей силы для стабилизирующего крутящего момента на управляемых колесах, чтобы управлять управляемыми колесами для обеспечения способности к прямолинейному движению транспортного средства.
2. Транспортное средство, содержащее:
систему управления рулением, которая приводит в действие актуатор в соответствии с управляемым состоянием руля, чтобы управлять управляемыми колесами; и
узел подвески, который поддерживает управляемые колеса на кузове транспортного средства, причем узел подвески включает в себя: механизм ступицы колеса, поддерживающий управляемые колеса; и элементы тяг, поддерживающие механизм ступицы колеса на кузове транспортного средства,
причем ось поворотного шкворня, проходящая через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, задается таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля, при этом система управления рулением вычисляет стабилизирующий крутящий момент для обеспечения способности к прямолинейному движению транспортного средства из управляемого состояния управляемых колес и приводит в действие актуатор, чтобы обеспечить стабилизирующий крутящий момент для управляемых колес.
3. Транспортное средство, содержащее:
систему управления рулением, состоящую из системы управления по проводам, которая приводит в действие актуатор в соответствии с управляемым состоянием руля, чтобы управлять управляемыми колесами, которые механически отделены от руля; и
узел подвески, включающий в себя: механизм ступицы колеса, поддерживающий колесо с шиной, к которому прикрепляется соответствующее одно из управляемых колес, и элементы тяг, поддерживающие механизм ступицы колеса на кузове транспортного средства,
причем ось поворотного шкворня, проходящая через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, задается таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля, при этом система управления рулением формирует восстанавливающую силу для стабилизации на управляемых колесах.
4. Транспортное средство, содержащее:
систему управления рулением, состоящую из системы управления по проводам, которая приводит в действие актуатор в соответствии с управляемым состоянием руля, чтобы управлять управляемыми колесами, которые механически отделены от руля; и
узел подвески, включающий в себя элементы тяг, поддерживающие управляемые колеса на кузове транспортного средства,
причем узел подвески устанавливается так, что ось поворотного шкворня, проходящая через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, задается таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля, при этом система управления рулением вычисляет стабилизирующий крутящий момент, чтобы обеспечивать способность к прямолинейному движению транспортного средства, и приводит в действие актуатор на основе вычисленного стабилизирующего крутящего момента, чтобы обеспечить восстанавливающую силу для управляемых колес.
5. Транспортное средство по любому из пп.1-4, в котором ось поворотного шкворня задается таким образом, что она проходит через поверхность шины между центром области контакта шины с поверхностью дороги в области контакта шины с поверхностью дороги и передним краем области контакта шины с поверхностью дороги.
6. Транспортное средство по п.5, в котором ось поворотного шкворня задается таким образом, что она проходит вблизи центра области контакта шины с поверхностью дороги в области контакта шины с поверхностью дороги.
7. Транспортное средство по любому из пп.1-4, в котором узел подвески имеет такую конструкцию, что плечо стабилизации оси поворотного шкворня находится в области контакта шины с поверхностью дороги.
8. Транспортное средство по п.7, в котором точка пересечения между плечом стабилизации оси поворотного шкворня и поверхностью дороги находится между центром области контакта шины с поверхностью дороги и передним краем области контакта шины с поверхностью дороги.
9. Транспортное средство, содержащее:
систему управления рулением, которая приводит в действие актуатор в соответствии с управляемым состоянием руля, чтобы управлять управляемыми колесами; и
узел подвески, включающий в себя: механизм ступицы колеса, поддерживающий управляемые колеса; и элементы тяг, поддерживающие механизм ступицы колеса на кузове транспортного средства,
причем ось поворотного шкворня, проходящая через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, задается таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля,
причем геометрия подвески, определенная посредством оси поворотного шкворня, задается в области положительного плеча обкатки колеса, при этом система управления рулением вычисляет стабилизирующий крутящий момент для обеспечения способности к прямолинейному движению транспортного средства из управляемого состояния управляемых колес и приводит в действие актуатор, чтобы обеспечить стабилизирующий крутящий момент для управляемых колес.
10. Транспортное средство, содержащее:
систему управления рулением, которая приводит в действие актуатор в соответствии с управляемым состоянием руля, чтобы управлять управляемыми колесами; и
узел подвески, включающий в себя элементы тяг, поддерживающие управляемые колеса на кузове транспортного средства,
причем ось поворотного шкворня, проходящая через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, задается таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля, при этом система управления рулением включает в себя: секцию обеспечения способности к прямолинейному движению, выполненную с возможностью обеспечения способности к прямолинейному движению транспортного средства; и секцию задания характеристики отклика при рулении, выполненную с возможностью регулировки времени начала управления для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению, когда руление посредством руля начинается от нейтральной позиции руля, причем секция обеспечения способности к прямолинейному движению состоит из системы управления по проводам, которая определяет смещение угла поворота при рулении, когда поворачивается руль, и включает в себя актуатор рулевого управления, осуществляющий руление управляемыми колесами на основе результата определения, и систему управления актуатора, которая управляет актуатором рулевого управления.
11. Транспортное средство, содержащее:
систему управления рулением, которая приводит в действие актуатор в соответствии с управляемым состоянием руля, чтобы управлять управляемыми колесами; и
узел подвески, который поддерживает управляемые колеса на кузове транспортного средства, причем узел подвески включает в себя: механизм ступицы колеса, поддерживающий колесо с шиной, к которому прикрепляется шина; и множество элементов тяг, поддерживающих механизм ступицы колеса на кузове транспортного средства и устанавливаемых так, что они задают ось поворотного шкворня, проходящую через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля,
при этом система управления рулением включает в себя: секцию обеспечения способности к прямолинейному движению, выполненную с возможностью обеспечения способности к прямолинейному движению транспортного средства; и секцию задания характеристики отклика при рулении, выполненную с возможностью регулировки управления для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению, когда руление посредством руля начинается от нейтральной позиции руля, и задания характеристики отклика при рулении на начальной стадии как характеристики отклика при рулении, которую имеет сам узел подвески, при этом секция обеспечения способности к прямолинейному движению состоит из системы управления по проводам, которая определяет смещение угла поворота при рулении, когда поворачивается руль, и включает в себя актуатор рулевого управления, осуществляющий руление управляемыми колесами на основе результата определения, и систему управления актуатора, которая управляет актуатором рулевого управления.
12. Транспортное средство по п.10 или 11, в котором ось поворотного шкворня задается таким образом, что она проходит через поверхность шины между центром области контакта шины с поверхностью дороги в области контакта шины с поверхностью дороги и передним краем области контакта шины с поверхностью дороги.
13. Транспортное средство по п.12, в котором ось поворотного шкворня задается таким образом, что она проходит поблизости от центра области контакта шины с поверхностью дороги в области контакта шины с поверхностью дороги.
14. Транспортное средство по п.10 или 11, в котором узел подвески имеет такую конструкцию, что плечо стабилизации оси поворотного шкворня находится в области контакта шины с поверхностью дороги.
15. Транспортное средство по п.14, в котором точка пересечения между плечом стабилизации оси поворотного шкворня и поверхностью дороги находится между центром области контакта шины с поверхностью дороги и передним краем области контакта шины с поверхностью дороги.
16. Транспортное средство по п.10 или 11, в котором узел подвески устанавливается с возможностью задавать геометрию подвески, определенную посредством угла наклона оси поворотного шкворня и радиуса плеча обкатки колеса в области положительного плеча обкатки колеса.
17. Транспортное средство по п.10 или 11, в котором секция обеспечения способности к прямолинейному движению обеспечивает способность к прямолинейному движению транспортного средства посредством вычисления стабилизирующего крутящего момента.
18. Транспортное средство по п.10 или 11, в котором секция обеспечения способности к прямолинейному движению вычисляет стабилизирующий крутящий момент на основе управляемого состояния управляемых колес транспортного средства для обеспечения способности к прямолинейному движению транспортного средства.
19. Транспортное средство по п.17, в котором секция обеспечения способности к прямолинейному движению вычисляет команду управления целью для обеспечения способности к прямолинейному движению посредством умножения вычисленного стабилизирующего крутящего момента на усиление.
20. Транспортное средство по п.10 или 11, в котором система управления рулением включает в себя секцию управления углом поворота при рулении, выполненную с возможностью выполнения коррекции смещений управляемого колеса посредством оценки подруливания за счет податливости.
21. Транспортное средство по п.10 или 11, в котором система управления рулением задает характеристику быстрого отклика согласно характеристике руления, которую имеет сам узел подвески в состоянии руления на начальной стадии, и задает требуемую характеристику отклика при рулении согласно управлению для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению в состоянии руления после прохождения состояния руления на начальной стадии, когда руление посредством руля начинается от нейтральной позиции руля.
22. Транспортное средство по п.10 или 11, в котором секция задания характеристики отклика при рулении включает в себя секцию управления задержкой, выполненную с возможностью задержки управления для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению, когда поворачивается руль от нейтральной позиции.
23. Транспортное средство по п.22, в котором секция управления задержкой включает в себя секцию регулировки усиления, выполненную с возможностью регулировки начала управления для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению.
24. Транспортное средство по п.22, в котором секция управления задержкой начинает управление для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению после задержки в 0,1 секунду от времени начала руления, когда руление вправо или влево выполняется из состояния, в котором руль удерживается в нейтральной позиции.
25. Транспортное средство по п.22, в котором секция управления задержкой начинает управление для обеспечения способности к прямолинейному движению пошагово в случае, если начинается управление для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению.
26. Транспортное средство по любому из пп.23-25, в котором секция управления задержкой постепенно начинает управление для обеспечения способности к прямолинейному движению в случае, если начинается управление для обеспечения способности к прямолинейному движению посредством секции обеспечения способности к прямолинейному движению.
27. Транспортное средство по п.10 или 11, в котором система управления рулением содержит:
секцию вычисления целевого угла поворота при рулении, выполненную с возможностью вычисления целевого угла поворота при рулении в соответствии с углом поворота при рулении;
сумматор, выполненный с возможностью суммирования значения управления для обеспечения способности к прямолинейному движению секции обеспечения способности к прямолинейному движению с целевым углом поворота при рулении, вычисленным посредством целевой секции вычисления угла поворота при рулении;
секцию управления электромотором рулевого управления, выполненную с возможностью формирования управляющего тока электромотора, который задает вывод по суммированию сумматора совпадающим с углом вращения электромотора рулевого управления, составляющего актуатор рулевого управления; и
секцию управления током, выполненную с возможностью формирования тока приведения в действие электромотора, совпадающего с управляющим током электромотора и подаваемого в электромотор рулевого управления.
28. Транспортное средство, содержащее:
систему управления рулением, состоящую из системы управления по проводам, которая приводит в действие актуатор, чтобы управлять управляемыми колесами, механически отделенными от руля, в соответствии с управляемым состоянием руля; и
узел подвески, включающий в себя: механизм ступицы колеса, поддерживающий колесо с шиной, к которому прикрепляется соответствующее одно из управляемых колес, и элементы тяг, поддерживающие механизм ступицы колеса на кузове транспортного средства,
причем узел подвески устанавливается так, что он задает ось поворотного шкворня, проходящую через верхнюю точку поворота элементов тяг и нижнюю точку поворота элементов тяг, таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля,
при этом система управления рулением включает в себя: основную секцию обеспечения способности к прямолинейному движению, выполненную с возможностью вычисления стабилизирующего крутящего момента для обеспечения способности к прямолинейному движению транспортного средства на основе управляемого состояния управляемых колес, чтобы вычислять значение команды управления для обеспечения способности к прямолинейному движению; и подсекцию обеспечения способности к прямолинейному движению, выполненную с возможностью вычисления значения команды управления, чтобы обеспечивать способность к прямолинейному движению на основе угла поворота при рулении водителя транспортного средства и угла поворота при рулении управляемых колес, при этом система управления рулением приводит в действие актуатор в ответ на значения команд управления основной секции обеспечения способности к прямолинейному движению и подсекции обеспечения способности к прямолинейному движению.
29. Способ управления для управляемых колес, содержащий этапы, на которых:
задают ось поворотного шкворня узла подвески, причем узел подвески включает в себя множество элементов тяг, поддерживающих управляемые колеса на кузове транспортного средства, таким образом, что она проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля;
осуществляют руление управляемых колес через актуатор в соответствии с управляемым состоянием руля;
вычисляют стабилизирующий крутящий момент, обеспечивающий способность к прямолинейному движению транспортного средства из управляемого состояния управляемых колес в нейтральной позиции руля; и
приводят в действие актуатор на основе вычисленного стабилизирующего крутящего момента, чтобы обеспечить стабилизирующую силу для обеспечения способности к прямолинейному движению транспортного средства для управляемых колес для управления управляемыми колесами.
30. Способ управления рулением для транспортного средства,
содержащий этапы, на которых:
устанавливают узел подвески, причем узел подвески включает в себя: механизмы ступиц колес, поддерживающие колесо с шиной, к которому прикрепляется шина; и множество элементов тяг, поддерживающих механизм ступицы колеса на кузове транспортного средства, так что ось поворотного шкворня, проходящая через верхнюю точку поворота элементов тяг и нижнюю точку элементов тяг, проходит в области контакта шины с поверхностью дороги в нейтральной позиции руля;
определяют смещение угла поворота при рулении, когда поворачивается руль, и управляют актуатором рулевого управления, который управляет управляемыми колесами на основе результата определения через систему управления по проводам;
вычисляют стабилизирующий крутящий момент, обеспечивающий способность к прямолинейному движению транспортного средства из управляемого состояния управляемых колес в нейтральной позиции руля;
приводят в действие актуатор на основе вычисленного стабилизирующего крутящего момента, чтобы обеспечивать стабилизирующую силу, обеспечивающую способность к прямолинейному движению транспортного средства для управляемых колес, чтобы управлять управляемыми колесами; и
когда руление посредством руля начинается от нейтральной позиции, задают характеристику отклика при рулении, которую имеет сам узел подвески, как характеристику отклика при рулении на начальной стадии на начальной стадии начала руления и начинают управление для обеспечения способности к прямолинейному движению самого узла подвески через актуатор рулевого управления после прохождения времени выполнения начальной стадии через актуатор рулевого управления.
31. Способ по п.30, при котором время выполнения начальной стадии задается равным 0,1 секундам.
| JP 11129926 A, 18.05.1999 | |||
| JP 2010058619 A, 18.03.2010 | |||
| JP 2010047193 A, 04.03.2010 | |||
| JP 2010058588 A, 18.03.2010 | |||
| ЭЛЕКТРОВОДОНАГРЕВАТЕЛЬ | 1997 |
|
RU2119616C1 |
| WO 2009113642 A1, 17.09.2009 | |||
| RU 2008104696 A, 20.08.2009 | |||

