Область техники, к которой относится изобретение
Настоящее изобретение относится к технике взвешивания автотранспортных средств в процессе их движения (weigh in motion - WIM) по трассе, а конкретнее - к способу динамического взвешивания автотранспортного средства и к системе для осуществления данного способа.
Уровень техники
Известны полностью автоматические устройства динамического взвешивания автотранспортных средств (АТС) для выявления перегруженных АТС без снижения скорости потока движения, которые уже более двадцати лет традиционно используются в мировой практике дорожного мониторинга для целей преселекции потенциально перегруженных АТС и последующего их контрольного взвешивания на стационарных или передвижных обслуживаемых постах, а также для сбора статистики транспортных потоков (см., например, статью В. Баса, Д. Загарина и др. «Дорога, которая себя защищает», журнал «Автомобильные дороги», №1, 2013, а также монографию В.И. Речицкого «Весогабаритный контроль автотранспорта» - М.: Фонд «Наука и жизнь, 2014).
В российской практике последних лет сфера применения автоматических устройств динамического взвешивания трактуется гораздо шире. В частности, с недавних пор, впервые в мировой практике, по результатам автоматического взвешивания, при выявлении превышения установленных законодательством весовых нормативов автоматически же производится расчет и начисление весьма ощутимых для перевозчика штрафных санкций (от 150 до 500 тыс. рублей) в зависимости от степени перевеса.
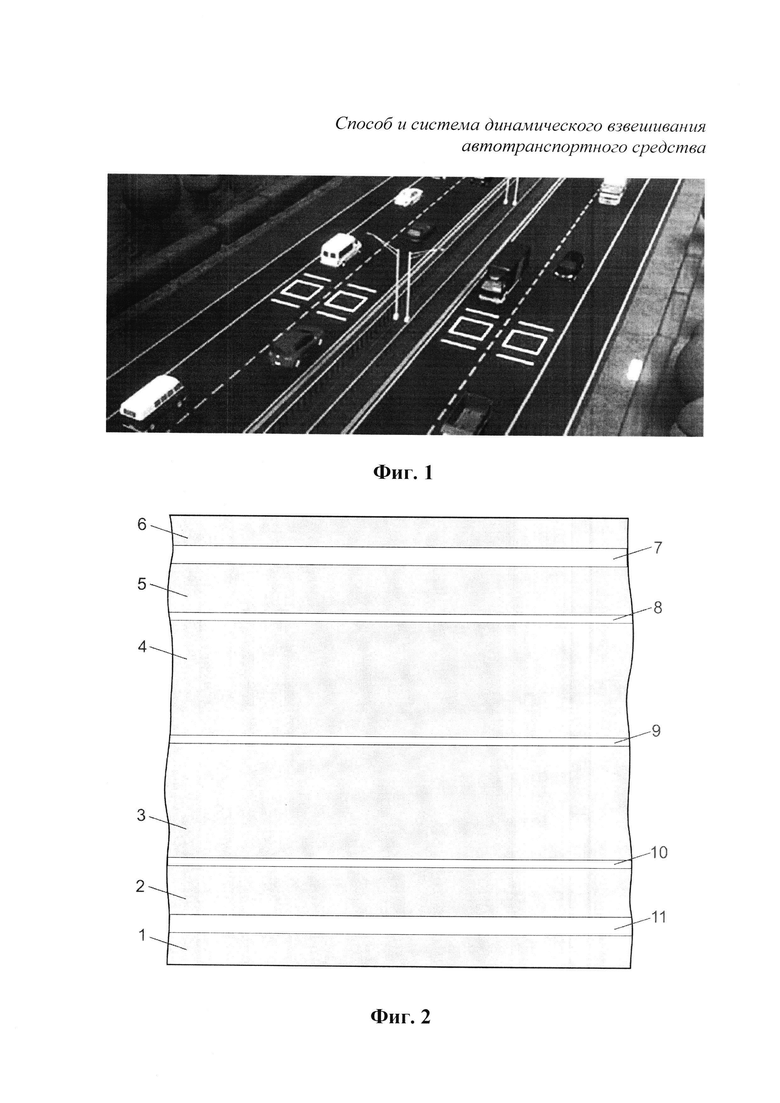
На этом фоне все чаще наблюдаются попытки водителей объехать зону взвешивания. Препятствующий таким маневрам тотальный весовой контроль, хотя и лишь по отношению к аналогичным попыткам объезда зоны статистики или преселекции, активно применяется сегодня даже в странах с весьма дисциплинированными автоперевозчиками, например в Великобритании. Способ, которым это осуществляется, более чем прост - автоматические устройства весового контроля устанавливаются на всех полосах движения. При этом в ряде случаев, группы встроенных в дорожное полотно весовых датчиков устанавливаются соосно относительно поперечного створа дороги (Фиг. 1; вышеуказанная книга В.И. Речицкого, стр. 116, Рис. 4.3).
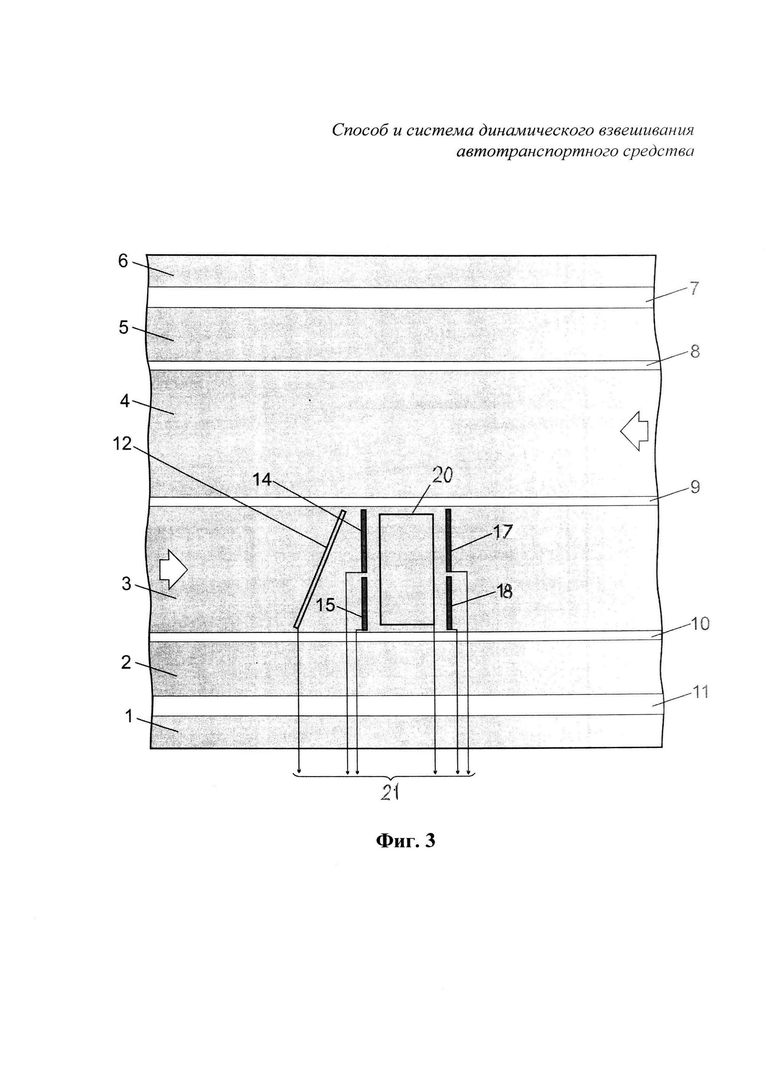
В отечественной практике максимальное относительное количество автоматических устройств весового контроля устанавливается на наиболее распространенных как в региональной, так и в федеральной сети двухполосных дорогах II-IV категорий. На Фиг. 2 схематично изображена выбранная в качестве примера двухполосная дорога с полосами 3, 4 встречного движения и проиллюстрированы ее основные элементы. Это обобщенная схема, имеющая все основные элементы двухполосных дорог с ограждением, включая сюда дороги уже упомянутых II-IV категорий.
Тот же самый чертеж может иллюстрировать и структуру одной из симметричных частей четырехполосной дороги с центральной разделительной полосой и ограждением по ее оси. В этом случае смежные полосы 3, 4 предназначены для движения в попутном направлении. Отметим, что на последующих чертежах направление движения указано широкой белой стрелкой.
Справа от полосы 3 движения расположена отделенная запрещающей разметкой в виде сплошной линии 10 краевая полоса 2 с покрытием, полностью идентичным покрытию полос 3, 4 движения, а затем барьерное ограждение 11 и неукрепленная обочина 1. Между полосами 3 и 4 движения размещена ограничительная осевая разметка 9. Слева от полосы 4 движения симметрично перечисленным выше элементам правой стороны дороги размещены в той же последовательности ограничительная разметка 8, краевая полоса 5, барьерное ограждение 7 и неукрепленная обочина 6.
Применительно к четырехполосной дороге с разделительной полосой, также частично иллюстрируемой Фиг. 2, полосы 3, 4 движения предназначены уже для движения в попутном направлении, а краевая полоса 5 и барьерное ограждение 7 относятся к разделительной полосе упомянутой четырехполосной дороги.
Краевая полоса 5 выполнена по аналогичной с полосой 3, 4 движения конструкции и, желательно, в едином с ней технологическом цикле при укладке краевой полосы 5 в зоне взвешивания.
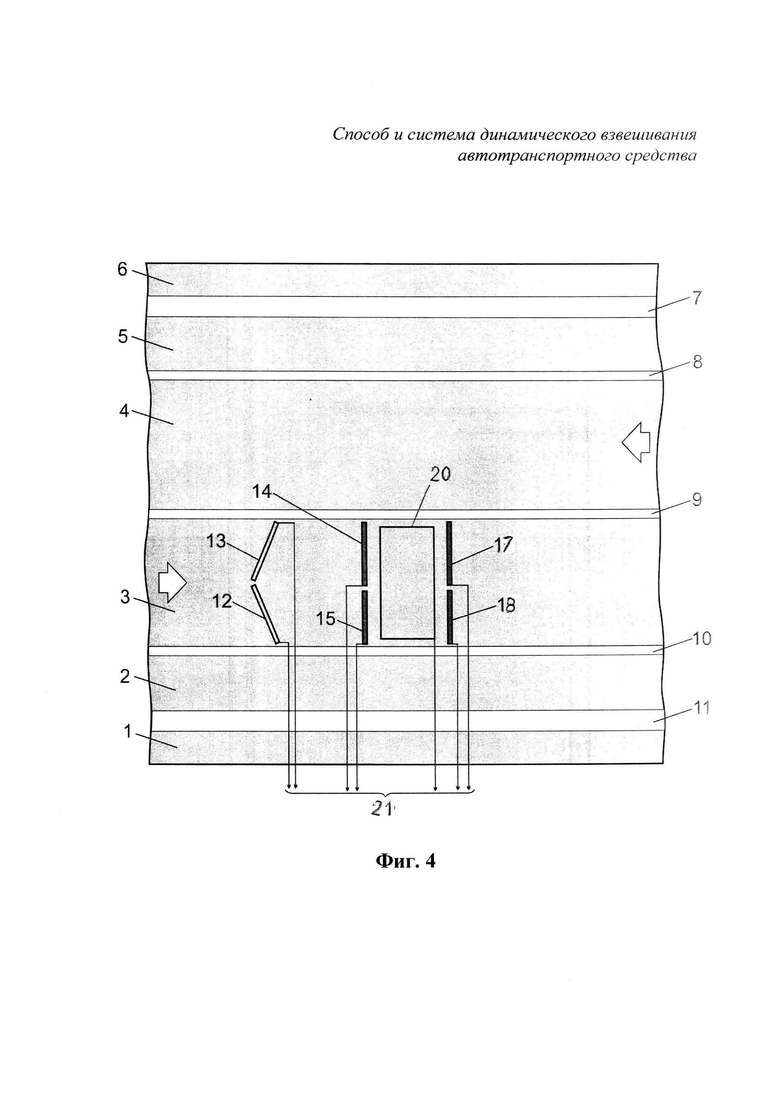
Фиг. 3 иллюстрирует известное, ограниченное зоной взвешивания, расположение на одной из полос (3) движения той же дороги совокупности вмонтированных в дорожное полотно датчиков (12-18) автоматической системы весового контроля, соединяемых с измерительным средством (19). Краевая полоса 2, 5 выполнена по аналогичной с полосой движения конструкции и, желательно, в едином с ней технологическом цикле. При укладке краевой полосы в районе зоны взвешивания в процессе подготовки уже существующей дороги к установке датчиков автоматического устройства весового контроля эта краевая полоса 2, 5 выполняется по такой же конструкции, что и полоса движения, и должна выдерживать нагрузку от проезжающих АТС по аналогии с проезжей частью.
В известных автоматических системах весового контроля содержится как минимум два прецизионных линейных датчика силы 14-17 (Фиг. 3), размещенных в дорожном полотне в пределах контролируемой полосы 3 движения и состоящих, обычно, из нескольких (чаще из двух) соосных частей каждый, последовательно расположенных по направлению движения. Эти прецизионные линейные датчики 14-17 силы дают возможность измерять нагрузку на поверхность дороги (на дорожное покрытие) от каждой проезжающей оси или каждого проезжающего колеса того или иного АТС. В традиционных реализациях автоматических систем весового контроля датчики 14-17 силы перекрывают непосредственно поперечное сечение контролируемой полосы 3 движения. Для точной индикации момента прохождения АТС и измерения его длины в той же полосе 3 движения обычно располагаются одна или две индуктивные петли 18.
В совокупность размещенных в зоне взвешивания датчиков входит по меньшей мере один, расположенный под отличным от прямого (т.е. под косым) углом к оси дороги и перекрывающий, как минимум, всю ширину контролируемой полосы 3 движения вспомогательный линейный датчик 12 силы, предназначенный для определения положения АТС на полосе движения и для определения числа колес на оси и числа скатов в колесных сборках. Отметим, что законодательство большинства стран нормирует предельную нагрузку на ось АТС с учетом имеющегося на ней числа колес и скатов в колесных сборках, и соответствующая позиция обязательна в наборе параметров, определяемых любыми автоматическими системами весового контроля, особенно ориентированными на формирование штрафных санкций за перевес.
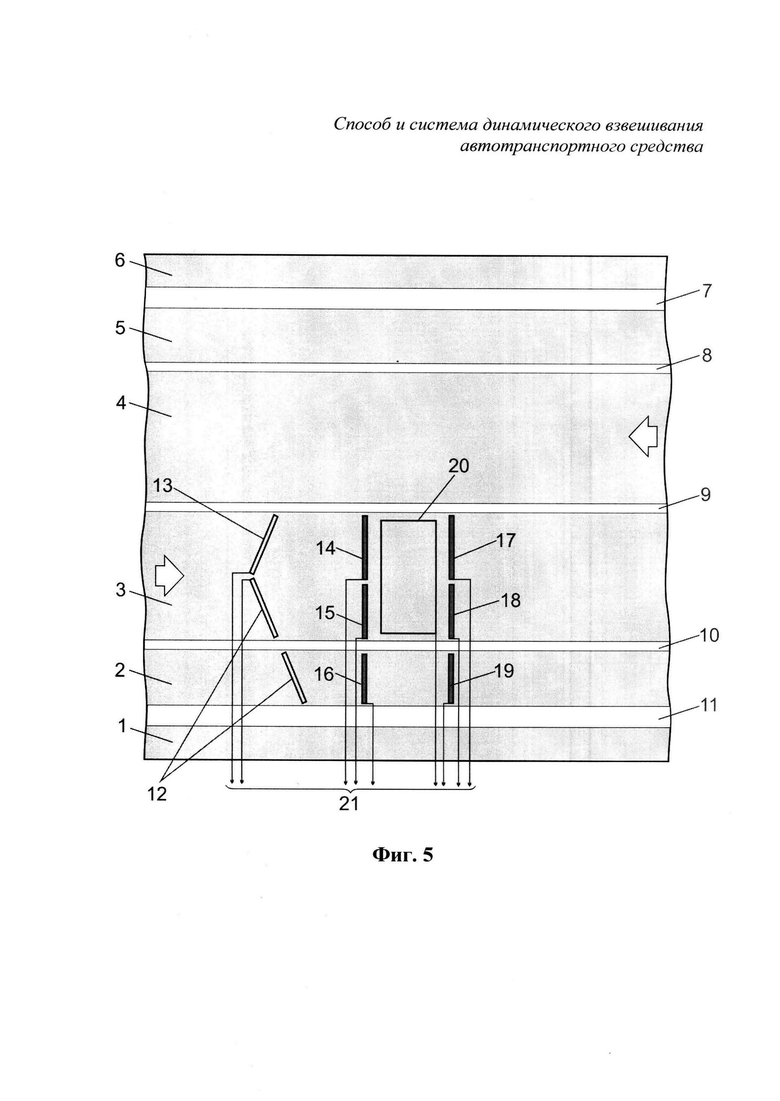
В другом варианте выполнения датчика, предназначенного для определения положения АТС на полосе 3 движения и для определения числа колес на оси и числа скатов в колесных сборках (Фиг. 4), в его состав добавляется еще по меньшей мере один датчик 13 силы, причем парциальные датчики 12, 13 располагаются либо параллельно (на Фиг. 4 не показано), либо зеркально (Фиг. 4) друг другу (см. патент РФ на полезную модель №120767, опубл. 27.09.2012). Заметим, что ширина краевой полосы 2 (Фиг. 3, 4) составляет примерно 1 м, что позволяет легко объехать по ней зону 23 взвешивания правыми колесами. Объезд же зоны 23 взвешивания слева, с выездом левых колес на смежную (в случае двухполосной дороги - встречную) полосу движения, также случай далеко не редкий.
С учетом специфики установки датчиков автоматических систем весового контроля, краевая полоса 2, как минимум, в зоне взвешивания, укладывается с перекрытием всего промежутка от края проезжей части (10) до бокового ограждения 11 (если оно предусмотрено). Укладка проезжей части и краевой полосы при этом должна производиться в едином технологическом цикле. С точки зрения прочности краевой полосы, она допускает проезд АТС, сместившегося с проезжей части 3 правыми колесами, но нанесенная на их границе разметка (10) это категорически запрещает. Заметим, что в ближайшее время законодатель будет трактовать этот факт не только как пересечение запрещающей разметки, но и как попытку объезда зоны взвешивания, за что планируется установить штраф, практически соизмеримый со штрафом за перевес АТС. Аналогичным образом будет трактоваться и выезд АТС за пределы предписанной полосы движения с пересечением осевой разметки 9.
Однако для вынесения решения о штрафе для АТС за выезд за пределы полосы движения с пересечением запрещающей разметки и, фактически, за попытку избежать взвешивания необходима убедительная инструментальная фиксация этого факта, причем в автоматическом режиме. Традиционно используемая фотовидеофиксация обычно срабатывает не самостоятельно, а по команде устройства, это нарушение обнаружившего (например, в системах фотовидеофиксации скоростных нарушений такую команду дает устройство, зафиксировавшее нарушение скоростного режима). В то же время входящая в состав автоматических систем весового контроля панорамная камера может не обеспечить пространственное разрешение, необходимое для достоверной оценки факта выезда за пределы полосы.
При этом датчики положения АТС (12 на Фиг. 3 или 12, 13 на Фиг. 4), перекрывающие в известном варианте лишь лежащую между боковой (10) и центральной (9) ограничительными линиями полосу 3 движения, среагируют при попытке объезда зоны взвешивания справа косвенным образом, зарегистрировав только проезд по ним левых колес АТС («потеряв» правые), но не зафиксируют одновременный проезд правых его колес по краевой полосе 2, что оставит факт пересечения АТС запретительной разметки без четкой инструментальной фиксации. Прецизионные линейные датчики 14, 15 и 16, 17 силы также перекрывают только сечение контролируемой полосы 3 и произведут взвешивание лишь непосредственно прошедших по ним колес АТС, в данном случае - левых. Аналогичная ситуация произойдет и при объезде зоны взвешивания слева, с выездом уже левых его колес за пределы предписанной полосы движения.
Таким образом, для АТС, частично объезжающего зону 23 взвешивания по краевой полосе 2, известная топология размещения совокупности прецизионных датчиков 14-17 и вспомогательных датчиков 12 (Фиг. 2) или 12, 13 (Фиг. 4) не обеспечит ни фиксацию попытки объезда, ни полноценное взвешивание АТС в случае его частичного смещения на краевую полосу 2 или полосу 4 встречного движения.
Раскрытие изобретения
Таким образом, задачей настоящего изобретения является разработка таких способа и системы динамического взвешивания автотранспортного средства, которые позволяли бы преодолеть отмеченные недостатки существующих аналогов и получить технический результат в виде обеспечения достоверной фиксации в автоматическом режиме попытки объезда контролируемой зоны взвешивания автотранспортным средством с пересечением ограничительной разметки, а также взвешивание автотранспортного средства, совершающего такой объезд.
Для решения указанной задачи и достижения отмеченного технического результата в первом объекте настоящего изобретения предложен способ динамического взвешивания автотранспортного средства (далее - АТС), в котором: размещают в дорожном покрытии контролируемой части дороги, включающей в себя контролируемую полосу движения с прилегающей к ней полосой дороги, по меньшей мере один прецизионный линейный датчик силы, предназначенный для измерения нагрузок на дорожное покрытие от осей проезжающего по нему АТС и полностью перекрывающий в поперечном направлении контролируемую полосу движения и, по меньшей мере, часть примыкающей к ней полосы дороги; размещают в дорожном покрытии по меньшей мере один вспомогательный линейный датчик силы, предназначенный для определения положения АТС, числа колес на его осях и скатов в колесных сборках, а также для инструментальной фиксации попытки выезда за пределы контролируемой полосы движения на примыкающую к ней полосу дороги, расположенный под косым углом к прецизионному линейному датчику силы и полностью перекрывающий в поперечном направлении контролируемую полосу движения и, по меньшей мере, часть примыкающей к ней полосы дороги; измеряют нагрузки на дорожное покрытие от осей АТС по сигналам с прецизионных линейных датчиков силы, а также вычисляют по измеренным нагрузкам общую массу АТС; контролируют разнесение во времени сигналов от прецизионного и вспомогательного линейных датчиков силы при проезде по ним одного и того же колеса или одной и той же колесной сборки с учетом измеренной скорости движения АТС и взаимного расположения прецизионного и вспомогательного линейных датчиков силы для фиксации выезда АТС за пределы контролируемой полосы движения.
Особенность способа по первому объекту изобретения состоит в том, что любой из прецизионных линейных датчиков силы могут выполнять составным и по меньшей мере одну из его составляющих могут размещать в полосе дороги, примыкающей к контролируемой полосе движения.
Другая особенность способа по первому объекту изобретения состоит в том, что любой из вспомогательных линейных датчиков силы выполняют из двух частей и каждую из них размещают по разные стороны от осевой линии контролируемой полосы движения параллельно либо зеркально одна к другой относительно этой осевой линии.
Еще одна особенность способа по первому объекту изобретения состоит в том, что полоса дороги, примыкающая к контролируемой полосе движения, может представлять собой краевую полосу дороги со стороны обочины либо разделительной полосы дороги. При этом краевую полосу дороги могут выполнять с барьерным ограждением по ее внешней границе.
Наконец, еще одна особенность способа по первому объекту изобретения состоит в том, что контролируемая часть дороги может включать в себя смежную с контролируемой полосой движения вторую контролируемую полосу движения, в дорожном покрытии которой могут размещать по меньшей мере один прецизионный линейный датчик силы и по меньшей мере один вспомогательный линейный датчик силы, при этом прецизионные линейные датчики силы на смежных полосах движения могут размещать соосно либо с таким максимальным смещением в направлении движения, чтобы предотвратить проезд в промежутке между ними каких-либо колес АТС в результате его маневра.
Для решения той же задачи и достижения того же технического результата во втором объекте настоящего изобретения предложена система динамического взвешивания автотранспортного средства (далее - АТС), установленная на контролируемой части дороги, включающей в себя контролируемую полосу движения с примыкающей к ней полосой дороги, и содержащая: по меньшей мере один прецизионный линейный датчик силы, размещенный в дорожном покрытии, предназначенный для измерения нагрузок на дорожное покрытие от осей проезжающего по нему АТС и полностью перекрывающий в поперечном направлении контролируемую полосу движения и, по меньшей мере, часть примыкающей к ней полосы дороги; по меньшей мере один вспомогательный линейный датчик силы, размещенный в дорожном покрытии под косым углом к прецизионному линейному датчику силы, предназначенный для определения положения АТС, числа колес на его осях и скатов в колесных сборках, а также для инструментальной фиксации попытки выезда за пределы контролируемой полосы движения на примыкающую к ней полосу дороги, и полностью перекрывающий в поперечном направлении контролируемую полосу движения и, по меньшей мере, часть примыкающей к ней полосы дороги; измерительное средство, выполненное с возможностью: измерять нагрузки на дорожное покрытие от осей АТС по сигналам с прецизионных линейных датчиков силы, а также вычислять по измеренным нагрузкам общую массу АТС; контролировать разнесение во времени сигналов от прецизионного и вспомогательного линейных датчиков силы при проезде по ним одного и того же колеса или одной и той же колесной сборки с учетом измеренной скорости движения АТС и взаимного расположения прецизионного и вспомогательного линейных датчиков силы для фиксации выезда АТС за пределы контролируемой полосы движения.
Особенность системы по второму объекту настоящего изобретения состоит в том, что любой из прецизионных линейных датчиков силы может быть выполнен составным и по меньшей мере одна из его составляющих может быть размещена в полосе дороги, примыкающей к контролируемой полосе движения.
Другая особенность системы по второму объекту настоящего изобретения состоит в том, что любой из вспомогательных линейных датчиков силы может быть выполнен из двух частей и каждая из них может быть размещена по разные стороны от осевой линии контролируемой полосы движения параллельно либо зеркально одна к другой относительно этой осевой линии.
Еще одна особенность системы по второму объекту настоящего изобретения состоит в том, что полоса дороги, примыкающая к контролируемой полосе движения, может представлять собой краевую полосу дороги со стороны обочины либо разделительной полосы дороги. При этом краевая полоса дороги может быть выполнена с барьерным ограждением по ее внешней границе.
Наконец, еще одна особенность системы по второму объекту настоящего изобретения состоит в том, что контролируемая часть дороги может включать в себя смежную с контролируемой полосой движения вторую контролируемую полосу движения, в дорожном покрытии которой могут быть размещены по меньшей мере один прецизионный линейный датчик силы и по меньшей мере один вспомогательный линейный датчик силы, при этом прецизионные линейные датчики силы на смежных полосах движения могут быть размещены соосно либо с таким максимальным смещением в направлении движения, чтобы предотвратить проезд в промежутке между ними каких-либо колес АТС в результате его маневра.
Краткое описание чертежей
Настоящее изобретение иллюстрируется приложенными чертежами, на которых одинаковые или сходные элементы обозначены одними и теми же ссылочными позициями.
Фиг. 1 иллюстрирует размещение автоматических устройств весового контроля на всех полосах движения четырехполосной дороги в Великобритании.
Фиг. 2 схематически показывает структуру двухполосной дороги.
Фиг.3 иллюстрирует известное, ограниченное зоной взвешивания расположение совокупности вмонтированных в дорожное полотно датчиков автоматической системы весового контроля на одной из полос дороги по Фиг. 2.
Фиг. 4 иллюстрирует известное выполнение датчика для определения положения АТС на полосе движения и для определения числа колес на оси и числа скатов в колесных сборках этого АТС.
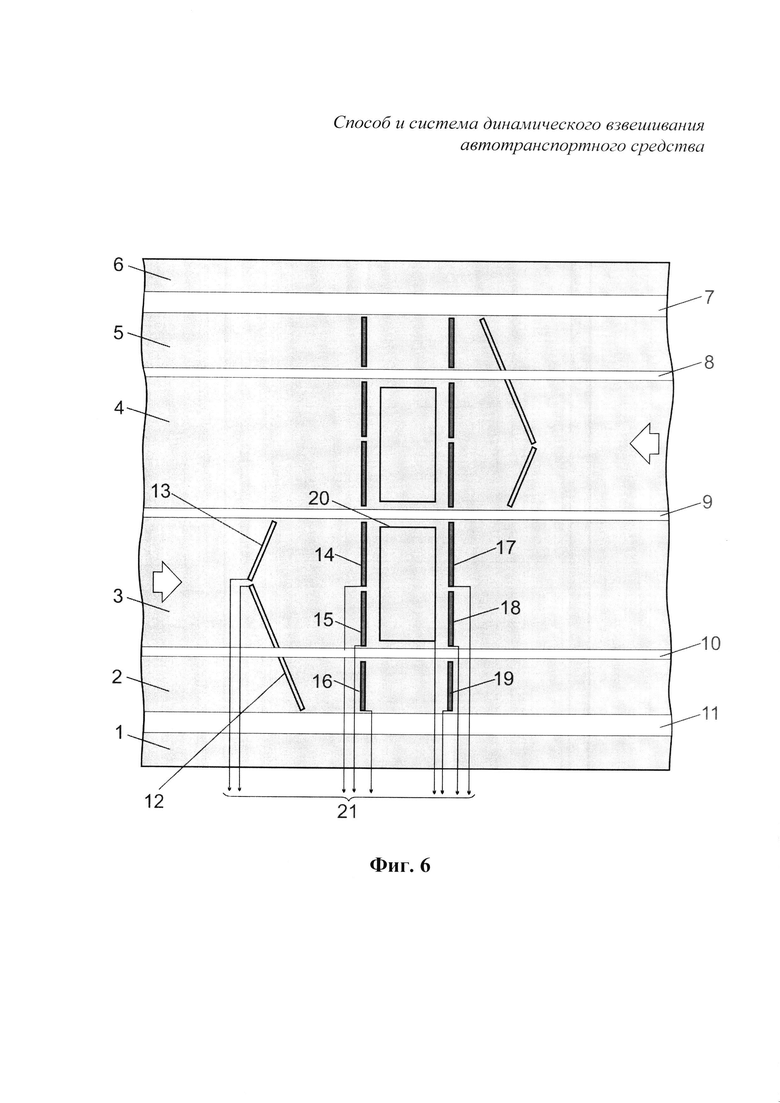
Фиг. 5 иллюстрирует вариант осуществления системы динамического взвешивания АТС по настоящему изобретению.
Фиг. 6 иллюстрирует другой вариант осуществления системы динамического взвешивания АТС по настоящему изобретению.
Подробное описание вариантов осуществления
Один из вариантов осуществления системы динамического взвешивания автотранспортного средства (АТС) по настоящему изобретению приведен на Фиг. 5.
На этом чертеже условно показана зона взвешивания на двухполосной дороге со полосами 3, 4 встречного движения, разделенными ограничительной разметкой 9 в виде сплошной линии, с другой стороны от которой каждая из полос 3, 4 движения ограничена запрещающей разметкой 10, 8 соответственно, выполненной также в виде сплошной линии. Справа по направлению движения, указанному белой широкой стрелкой, от каждой полосы 3, 4 расположена краевая полоса 2, 5 соответственно, с покрытием, полностью идентичным покрытию полос 3, 4 движения. За краевыми полосами 2, 5 выполнено барьерное ограждение 11, 7 соответственно, за которым имеется неукрепленная обочина 1, 6 соответственно.
В дорожном покрытии контролируемой части дороги, включающей в данном варианте осуществления контролируемую полосу 3 движения (нижнюю на Фиг. 5) с прилегающей к ней полосой дороги (краевой полосой 2 в данном варианте осуществления), размещены прецизионные линейные датчики 14-16 и 17-19 силы, составленные из трех частей. В общем случае в дорожном покрытии контролируемой части дороги может размещаться по меньшей мере один прецизионный линейный датчик силы, каждый из которых предназначенный для измерения нагрузок на дорожное покрытие от осей проезжающего по нему АТС. Такой датчик в общем случае полностью перекрывает в поперечном направлении контролируемую полосу 3 движения и, по меньшей мере, часть примыкающей к ней полосы 2 дороги. Для простоты в обращении (при изготовлении, транспортировке и установке в дорожное покрытие) каждый прецизионный линейный датчик силы может быть составным, как показано на Фиг. 5. При этом одна из составляющих прецизионного линейного датчика силы (16 и 19 на Фиг. 5) размещена в части краевой полосы 2.
Специалистам понятно, что для случая, когда контролируемая часть дороги включает в себя, помимо рассмотренной контролируемой полосы 3 движения с примыкающей (краевой) полосой 2, еще одну смежную полосу движения, к которой примыкает своя краевая полоса, за которой следует барьерное ограждение (как показано на Фиг. 1), соответствующий прецизионный линейный датчик силы (или одна из его составляющих) будет, по меньшей мере частично, выступать на эту ближайшую к центральной разделительной полосе краевую полосу.
Показанная на Фиг. 5 индуктивная петля 20 предназначена для точной индикации момента прохождения АТС и измерения его длины.
Помимо этого в дорожном покрытии контролируемой части дороги размещают по меньшей мере один вспомогательный линейный датчик (12, 13) силы, предназначенный для определения положения АТС, числа колес на его осях и скатов в колесных сборках, а также для инструментальной фиксации попытки выезда за пределы контролируемой полосы (3) движения на примыкающую к ней полосу (2) дороги. Этот вспомогательный линейный датчик 12-13 силы расположен под косым углом к прецизионному линейному датчику 14-16 силы и полностью перекрывает в поперечном направлении контролируемую полосу (3) движения и, по меньшей мере, часть примыкающей к ней полосы (2) дороги. При этом каждый вспомогательный линейный датчик 12-13, как и прецизионный линейный датчик силы, может быть составным, так что одна его составляющая может быть размещена в примыкающей (краевой) полосе (2) дороги. С другой стороны, составляющие вспомогательного линейного датчика 12-13 силы, размещенные в контролируемой полосе 3 движения, могут быть размещены по разные стороны от осевой линии этой контролируемой полосы 3 движения параллельно либо зеркально одна к другой относительно осевой линии. На Фиг. 5 показан случай зеркального расположения составляющих 12 вспомогательного линейного датчика силы.
Специалистам понятно, что выполнение самих линейных датчиков (12-19) силы и индуктивных петель 20 может быть таким же, как в известных аналогах. Отличие линейных датчиков силы в настоящем изобретении состоит в том, что они выступают на полосу дороги, примыкающую к контролируемой полосе движения.
На Фиг. 5 ссылочной позицией 21 отмечены выводы от всех линейных датчиков силы, идущие к измерительному средству (не показано), которое выполнено с возможностью:
- измерять нагрузки на дорожное покрытие от осей АТС по сигналам с прецизионных линейных датчиков 14-16, 17-19 силы, а также вычислять по измеренным нагрузкам общую массу АТС;
- контролировать разнесение во времени сигналов от прецизионного и вспомогательного линейных датчиков силы при проезде по ним одного и того же колеса или одной и той же колесной сборки с учетом измеренной скорости движения АТС и взаимного расположения прецизионного и вспомогательного линейных датчиков силы для фиксации выезда АТС за пределы контролируемой полосы движения.
Специалистам понятно, что в случае выполнения линейных датчиков силы составными указанный выше контроль за разнесением во времени сигналов осуществляется для каждой соответствующей пары составляющих: для примера по Фиг. 5 это будут составляющие 13 и 14 (или 17), 12 (верхняя) и 15 (или 18), 12 (нижняя) и 16 (или 19). В качестве измерительного средства может быть использован, например, соответственно запрограммированный персональный компьютер или специализированный вычислительный модуль, способный выполнять указанные выше функции. Конкретные измерительные и вычислительные операции, осуществляемые данным измерительным средством, не входят в объем притязаний по настоящему изобретению.
При необходимости тотального перекрытия, например, двухполосной дороги применим вариант осуществления, показанный на Фиг. 6. В этом случае система динамического взвешивания автотранспортного средства по настоящему изобретению содержит в другой контролируемой полосе 4 движения, смежной с уже рассмотренной полосой 3, те же элементы, что и показанные на Фиг. 5. При этом прецизионные линейные датчики 14-16 и 17-19 на смежных полосах 3, 4 движения размещены либо соосно (как на Фиг. 6), либо с таким максимальным смещением в направлении движения, чтобы предотвратить проезд в промежутке между ними каких-либо колес АТС в результате его маневра.
Таким образом, предложенная группа изобретений фиксирует в зоне взвешивания выезд автотранспортного средства на полосу, примыкающую к контролируемой полосе движения, и одновременно дает возможность определить вес такого автотранспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ АВТОМАТИЧЕСКИХ ПОСТОВ ВЕСОВОГО КОНТРОЛЯ АВТОТРАНСПОРТА | 2015 |
|
RU2608851C1 |
| ЛИНЕЙНЫЙ ДОРОЖНЫЙ ДАТЧИК | 2014 |
|
RU2557434C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕДА АВТОДОРОГАМ ОТ ПЕРЕВОЗКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ | 2014 |
|
RU2568239C1 |
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА (АТС) | 2013 |
|
RU2531655C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОГО ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2584715C1 |
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2554678C1 |
| УСТРОЙСТВО ЦИКЛИЧЕСКОГО НАГРУЖЕНИЯ ЛИНЕЙНЫХ ДОРОЖНЫХ ДАТЧИКОВ | 2014 |
|
RU2559301C1 |
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2531654C2 |
| ЛИНЕЙНЫЙ ДОРОЖНЫЙ ДАТЧИК ВЕСА | 2014 |
|
RU2564151C1 |
| СПОСОБ И КОМПЛЕКТ ДЛЯ СТАТИЧЕСКОГО ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2538357C1 |
Изобретения относятся к технике взвешивания автотранспортного средства (АТС) в процессе движения. Система содержит прецизионный линейный датчик силы, размещенный в дорожном покрытии и полностью перекрывающий в поперечном направлении контролируемую полосу движения и примыкающую к ней полосу дороги; вспомогательный линейный датчик силы, размещенный в дорожном покрытии под косым углом к прецизионному линейному датчику силы и полностью перекрывающий в поперечном направлении контролируемую полосу движения и примыкающую к ней полосу дороги; и измерительное средство, выполненное с возможностью измерять нагрузки на дорожное покрытие по сигналам с прецизионного линейного датчика силы, а также вычислять по измеренным нагрузкам общую массу АТС и контролировать разнесение во времени сигналов от прецизионного и вспомогательного линейных датчиков силы при проезде по ним одного и того же колеса или одной и той же колесной сборки с учетом измеренной скорости движения АТС и взаимного расположения этих прецизионного и вспомогательного линейных датчиков силы для фиксации выезда АТС за пределы контролируемой полосы движения. Способ реализуется в соответствии с устройством системы. Технический результат заключается в возможности обеспечения достоверной фиксации в автоматическом режиме попытки объезда контролируемой зоны взвешивания автотранспортным средством с пересечением ограничительной разметки, а также взвешивание автотранспортного средства, совершающего такой объезд. 2 н. и 10 з.п. ф-лы, 6 ил. 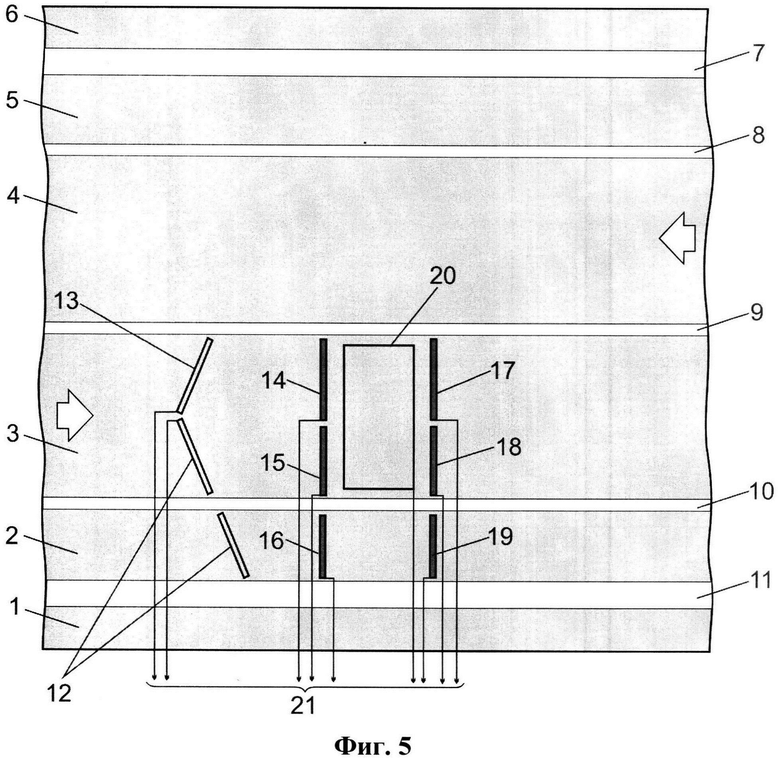
1. Способ динамического взвешивания автотранспортного средства (далее - АТС), в котором:
- размещают в дорожном покрытии контролируемой части дороги, включающей в себя контролируемую полосу движения с прилегающей к ней полосой дороги, по меньшей мере один прецизионный линейный датчик силы, предназначенный для измерения нагрузок на дорожное покрытие от осей проезжающего по нему АТС и полностью перекрывающий в поперечном направлении упомянутую контролируемую полосу движения и по меньшей мере часть примыкающей к ней полосы дороги;
- размещают в упомянутом дорожном покрытии по меньшей мере один вспомогательный линейный датчик силы, предназначенный для определения положения упомянутого АТС, числа колес на его осях и скатов в колесных сборках, а также для инструментальной фиксации попытки выезда за пределы упомянутой контролируемой полосы движения на упомянутую примыкающую к ней полосу дороги, расположенный под косым углом к упомянутому прецизионному линейному датчику силы и полностью перекрывающий в поперечном направлении упомянутую контролируемую полосу движения и по меньшей мере упомянутую часть примыкающей к ней полосы дороги;
- измеряют упомянутые нагрузки на дорожное покрытие от осей упомянутого АТС по сигналам с упомянутых прецизионных линейных датчиков силы, а также вычисляют по измеренным нагрузкам общую массу упомянутого АТС;
- контролируют разнесение во времени сигналов от упомянутых прецизионного и вспомогательного линейных датчиков силы при проезде по ним одного и того же колеса или одной и той же колесной сборки с учетом измеренной скорости движения упомянутого АТС и взаимного расположения упомянутых прецизионного и вспомогательного линейных датчиков силы для фиксации выезда упомянутого АТС за пределы упомянутой контролируемой полосы движения.
2. Способ по п. 1, в котором любой из упомянутых прецизионных линейных датчиков силы выполняют составным и по меньшей мере одну из его составляющих размещают в упомянутой полосе дороги, примыкающей к контролируемой полосе движения.
3. Способ по п. 1, в котором любой из упомянутых вспомогательных линейных датчиков силы выполняют из двух частей и каждую из них размещают по разные стороны от осевой линии упомянутой контролируемой полосы движения параллельно либо зеркально одна к другой относительно упомянутой осевой линии.
4. Способ по п. 1, в котором упомянутая полоса дороги, примыкающая к контролируемой полосе движения, представляет собой краевую полосу дороги со стороны обочины либо разделительной полосы дороги.
5. Способ по п. 4, в котором упомянутую краевую полосу дороги выполняют с барьерным ограждением по ее внешней границе.
6. Способ по п. 1, в котором упомянутая контролируемая часть дороги включает в себя смежную с упомянутой контролируемой полосой движения вторую контролируемую полосу движения, в дорожном покрытии которой размещают по меньшей мере один прецизионный линейный датчик силы и по меньшей мере один вспомогательный линейный датчик силы, при этом упомянутые прецизионные линейные датчики силы на смежных полосах движения размещают соосно либо с таким максимальным смещением в направлении движения, чтобы предотвратить проезд в промежутке между ними каких-либо колес упомянутого АТС в результате его маневра.
7. Система динамического взвешивания автотранспортного средства (далее - АТС), установленная на контролируемой части дороги, включающей в себя контролируемую полосу движения с примыкающей к ней полосой дороги, и содержащая:
- по меньшей мере один прецизионный линейный датчик силы, размещенный в дорожном покрытии, предназначенный для измерения нагрузок на упомянутое дорожное покрытие от осей проезжающего по нему АТС и полностью перекрывающий в поперечном направлении упомянутую контролируемую полосу движения и по меньшей мере часть упомянутой примыкающей к ней полосы дороги;
- по меньшей мере один вспомогательный линейный датчик силы, размещенный в упомянутом дорожном покрытии под косым углом к упомянутому прецизионному линейному датчику силы, предназначенный для определения положения упомянутого АТС, числа колес на его осях и скатов в колесных сборках, а также для инструментальной фиксации попытки выезда за пределы упомянутой контролируемой полосы движения на упомянутую примыкающую к ней полосу дороги, и полностью перекрывающий в поперечном направлении упомянутую контролируемую полосу движения и по меньшей мере упомянутую часть примыкающей к ней полосы дороги;
- измерительное средство, выполненное с возможностью:
 измерять упомянутые нагрузки на дорожное покрытие от осей упомянутого АТС по сигналам с упомянутых прецизионных линейных датчиков силы, а также вычислять по измеренным нагрузкам общую массу упомянутого АТС;
измерять упомянутые нагрузки на дорожное покрытие от осей упомянутого АТС по сигналам с упомянутых прецизионных линейных датчиков силы, а также вычислять по измеренным нагрузкам общую массу упомянутого АТС;
контролировать разнесение во времени сигналов от упомянутых прецизионного и вспомогательного линейных датчиков силы при проезде по ним одного и того же колеса или одной и той же колесной сборки с учетом измеренной скорости движения упомянутого АТС и взаимного расположения упомянутых прецизионного и вспомогательного линейных датчиков силы для фиксации выезда упомянутого АТС за пределы упомянутой контролируемой полосы движения.
8. Система по п. 7, в которой любой из упомянутых прецизионных линейных датчиков силы выполнен составным и по меньшей мере одна из его составляющих размещена в упомянутой полосе дороги, примыкающей к контролируемой полосе движения.
9. Система по п. 7, в которой любой из упомянутых вспомогательных линейных датчиков силы выполнен из двух частей и каждая из них размещена по разные стороны от осевой линии упомянутой контролируемой полосы движения параллельно либо зеркально одна к другой относительно упомянутой осевой линии.
10. Система по п. 7, в которой упомянутая полоса дороги, примыкающая к контролируемой полосе движения, представляет собой краевую полосу дороги со стороны обочины либо разделительной полосы дороги.
11. Система по п. 10, в которой упомянутая краевая полоса дороги выполнена с барьерным ограждением по ее внешней границе.
12. Система по п. 10, в которой упомянутая контролируемая часть дороги включает в себя смежную с упомянутой контролируемой полосой движения вторую контролируемую полосу движения, в дорожном покрытии которой размещены по меньшей мере один прецизионный линейный датчик силы и по меньшей мере один вспомогательный линейный датчик силы, при этом упомянутые прецизионные линейные датчики силы на смежных полосах движения размещены соосно либо с таким максимальным смещением в направлении движения, чтобы предотвратить проезд в промежутке между ними каких-либо колес упомянутого АТС в результате его маневра.
| СПОСОБ ВЕСОВОГО КОНТРОЛЯ ЛОКАЛЬНОЙ ГРУППЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2605531C1 |
| Передвижной ленточный транспортер с решетчатой опирающейся на ходовые колеса рамой | 1958 |
|
SU120767A1 |
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2531654C2 |

