Область техники, к которой относится изобретение
Данное изобретение относится к измерительной технике, а конкретнее - к линейному дорожному датчику, предназначенному для взвешивания автотранспортных средств (АТС).
Уровень техники
В настоящее время известно много различных линейных дорожных датчиков, используемых для взвешивания в движении автотранспортных средств. Эти датчики используют, как правило, пьезоэлектрические или оптоволоконные чувствительные элементы.
Применительно к задаче динамического измерения поосного и общего веса АТС в процессе движения («Weigh-in-Motion» - WIM) наиболее распространенными в мировой практике являются линейные дорожные датчики на основе дискретных чувствительных элементов. Эти устройства чаще всего представляют собой набор дискретных монокристаллических, например, кварцевых чувствительных элементов, выполненных обычно в виде шайб и расположенных в одном или нескольких параллельных рядах с небольшим пространственным разнесением внутри (вдоль) жесткой конструкции, установленной в дорожном покрытии поперек направления движения АТС (см., к примеру, патент США №5501111, опубл. 26.03.1996).
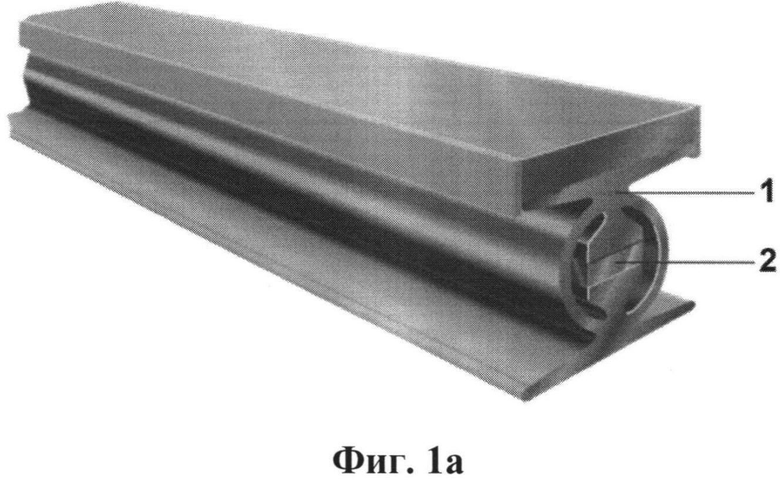
В наиболее распространенной в мировой практике реализации WIM корпус линейного дорожного датчика представляет собой установленный в дорожном покрытии экструдированный алюминиевый профиль (см., к примеру, патент США на промышленный образец №D686928, опубл. 30.07.2013) с размещенными в его замкнутом внутреннем объеме чувствительными элементами. На Фиг. 1a показан вид в изометрии такого профиля 1, а ссылочная позиция 2 отмечает дискретный чувствительный элемент. Такие чувствительные элементы (шайбы из монокристаллического пьезо-материала, чаще всего - из монокристаллического кварца) расположены внутри замкнутого объема корпуса датчика вдоль его продольной оси обычно с одинаковым пространственным шагом; их форма при этом может быть произвольной, хотя, в большинстве реализаций, они представляют собой круглые диски (см., например, патент США №5641924, опубл. 31.10.1995, либо сайт фирмы KISTLER: www.kistler.com/ru, либо статью В.И. Речицкого «Из жизни дорожных датчиков», журнал «Автомобильные дороги», №7, 2013, стр. 61-70). Шаг установленных в корпусе такого датчика чувствительных элементов обычно составляет 5-10 см. Протяженность датчика (Фиг. 16) чаще всего выбирается из условия перекрытия половины полосы движения и составляет 1,75-2,0 м.
На сегодня линейные дорожные датчики такого типа реализуют максимальную точность измерения веса среди других модификаций (на базе пьезополимерных кабелей, гидравлических и оптоволоконных чувствительных элементов и т.п.). В весьма реальной среднесрочной перспективе перехода к полностью автоматическому весовому мониторингу АТС эти датчики пока не имеют конкурентов в сфере практической реализации соответствующих весовых систем.
В процессе выходного контроля на финише производственного цикла разброс показаний таких датчиков по всей их протяженности, при последовательном приложении в каждой из точек датчика одинакового по величине нормированного усилия в направлении, перпендикулярном плоскости шайб, по информации производителя обычно укладывается в пределы до 1-2%. Однако корректность этой оценки опровергается как теоретическим анализом, так и результатами измерений в процессе входного контроля у потребителей.
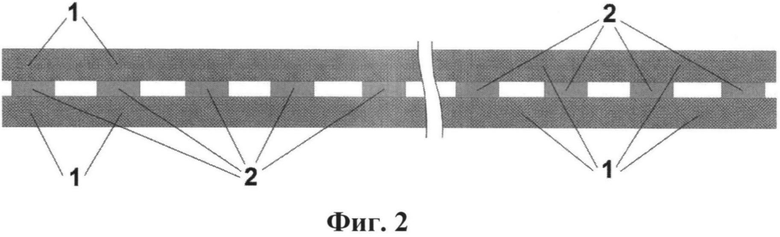
Оценим метрологическую корректность процесса выходного контроля на базе схематической модели датчика (Фиг. 2), чувствительные элементы 2 которого размещены между двумя параллельно расположенными концентраторами (жесткими обкладками) 1. Верхний концентратор распределяет поступающее от колеса АТС усилие между лежащими вокруг точки его приложения чувствительными элементами 2. Естественно, что по мере удаления от точки приложения усилие, поступающее к соответствующим чувствительным элементам, убывает. Именно этим обстоятельством и объясняется снижение точности датчика по мере приближения точки приложения усилия к геометрической периферии датчика, которое мы назовем «краевым эффектом».
Очевидно, что по мере приближения точки приложения усилия к краю датчика результирующее показание может выходить из указанных пределов в сторону уменьшения, так как перераспределяемое внешним концентратором усилие в этом случае взаимодействует с периферийными чувствительными элементами, расположенными ближе к центру датчика, поскольку по другую сторону от точки приложения их число уменьшается, и для крайней позиции приложения усилия равно нулю.
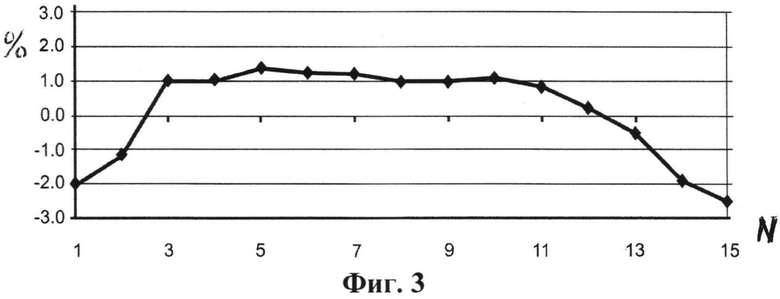
На Фиг. 3 приведен график реакции датчика (в процентах к среднему значению) на пошаговое нормированное усилие (см. книгу В.И. Речицкий. «Весогабаритный контроль автотранспорта» - М.: Фонд «Наука и жизнь», 2014 г. - 196 с). На оси абсцисс отложены номера дискретных чувствительных элементов по длине этого датчика. Декларируемую точность он демонстрирует далеко не по всей протяженности. И только если ограничить рабочую зону датчика (№№3-11), проигнорировав показатели зон периферийных (№№1-2 и 12-15), то он станет реально прецизионным.
После монтажа такого датчика в дорожное покрытие разброс показаний при прохождении через него осей АТС, формирующих вертикальную нагрузку, расширяется уже до 11-13%.
Раскрытие изобретения
Таким образом, задача настоящего изобретения состоит в разработке линейного дорожного датчика с меньшим разбросом показаний, что позволит повысить базовую точность датчика и приведет к соответствующему возрастанию итоговой точности, реализуемой и оцениваемой уже после его установки в дорожное покрытие.
Для решения этой задачи и достижения указанного технического результата в настоящем изобретении предложен линейный дорожный датчик, предназначенный для взвешивания автотранспортного средства (АТС) и размещаемый в дорожном полотне под заранее заданным углом к направлению перемещения упомянутого АТС, содержащий: линейное основание; совокупность дискретных чувствительных элементов, расположенных на линейном основании по его длине с заранее заданным разнесением один от другого и выполненных каждый с возможностью формировать сигнал, пропорциональный величине приложенного к нему вертикального воздействия; концентратор, расположенный поверх совокупности дискретных чувствительных элементов, предназначенный для передачи на них усилия, возникающего при проезде колеса АТС через линейный дорожный датчик, и распределяющий усилие между дискретными чувствительными элементами, лежащими вокруг точки приложения данного усилия; при этом разнесение между соседними дискретными чувствительными элементами, расположенными вблизи любого конца линейного дорожного датчика, уменьшается в направлении конца для компенсации уменьшения величины итогового сигнала, формируемого соответствующей совокупностью дискретных чувствительных элементов по мере смещения точки приложения упомянутого усилия к концу линейного дорожного датчика.
Особенность линейного дорожного датчика по настоящему изобретению состоит в том, что дискретные чувствительные элементы в средней части линейного дорожного датчика могут быть размещены с одинаковым разнесением один от другого, а уменьшение этого разнесения по мере смещения к концу линейного дорожного датчика выбрано в обратной зависимости по отношению к изменению величины итогового сигнала, имеющего место в линейном дорожном датчике с одинаковым по всей его длине разнесением дискретных чувствительных элементов по мере смещения точки приложения усилия к концу такого линейного дорожного датчика.
Краткое описание чертежей
На Фиг. 1а и 1б показан известный линейный дорожный датчик.
На Фиг. 2 приведена схематическая модель датчика по Фиг. 1.
На Фиг. 3 приведен график реакции датчика по Фиг. 1 на пошаговое нормированное усилие.
На Фиг. 4 приведена схематическая модель части линейного дорожного датчика по настоящему изобретению.
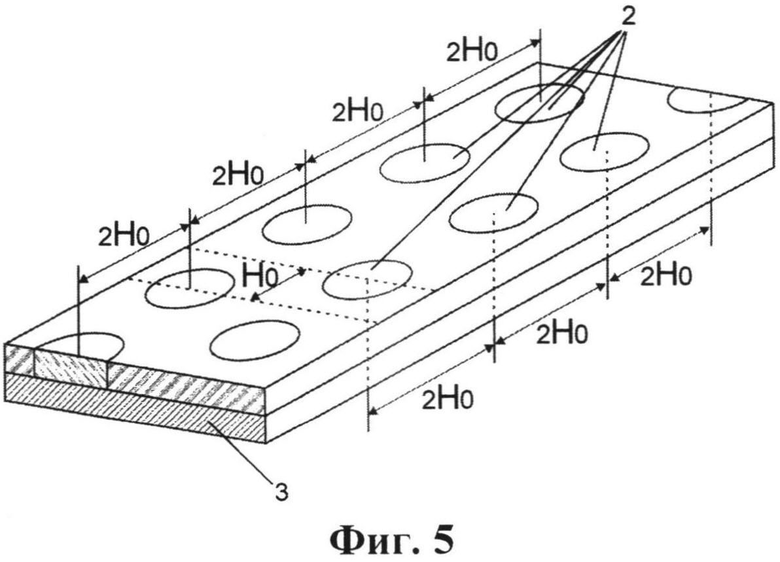
На Фиг. 5 показан вид в перспективе средней части линейного дорожного датчика по настоящему изобретению с двухрядным размещением дискретных чувствительных элементов.
Подробное описание вариантов осуществления
Линейный дорожный датчик по настоящему изобретению содержит (Фиг. 4) линейное основание 3, служащее подложкой для размещения на нем совокупности дискретных чувствительных элементов 2, расположенных на линейном основании 3 по его длине с заранее заданным разнесением один от другого. Каждый из дискретных чувствительных элементов 2 выполнен с возможностью формировать сигнал, пропорциональный величине приложенного к этому элементу вертикального воздействия. Для этого дискретные чувствительные элементы могут быть выполнены, например, из монокристаллического кварца, как это имеет место в упомянутом патенте США №5641924, либо из любого иного материала, позволяющего получить сигнал от такого элемента при надавливании сверху, к примеру, из лангасита.
На все дискретные чувствительные элементы 2 сверху наложен концентратор 4, предназначенный для передачи усилия, возникающего при проезде колеса автотранспортного средства (АТС) через линейный дорожный датчик, на дискретные чувствительные элементы 2 и распределяющий это усилие между дискретными чувствительными элементами 2, лежащими вокруг точки приложения данного усилия.
Как линейное основание 3, так и концентратор 4 могут быть выполнены, например, как описано в патенте РФ на полезную модель №127913 (опубл. 10.05.2013).
Отличительная особенность линейного дорожного датчика по настоящему изобретению состоит в том, что разнесение между соседними дискретными чувствительными элементами 2, расположенными вблизи любого из двух концов линейного дорожного датчика, уменьшается в направлении этого конца, чтобы скомпенсировать уменьшение величины итогового сигнала, формируемого соответствующей совокупностью дискретных чувствительных элементов по мере смещения точки приложения усилия к данному концу линейного дорожного датчика.
В частности, такое уменьшение разнесения между дискретными чувствительными элементами 2 можно реализовать следующим образом. В средней части линейного дорожного датчика дискретные чувствительные элементы 2 размещены с одинаковым разнесением H0 один от другого (Фиг. 4). На концах же линейного дорожного датчика это разнесение, по мере смещения к концу линейного дорожного датчика, выбрано в обратной зависимости по отношению к изменению величины итогового сигнала, имеющего место в линейном дорожном датчике с одинаковым по всей его длине разнесением Но дискретных чувствительных элементов по мере смещения точки приложения усилия к концу такого линейного дорожного датчика. Как показано на Фиг. 4, начиная с некоторого расстояния перед концом линейного дорожного датчика, разнесение Hi (i=1, 2, …, k; Hk=Hmin) начинает уменьшаться по мере приближения к этому концу, так что H1>H2>…>Hmin.
Иными словами, разнесение H дискретных чувствительных элементов в линейном дорожном датчике по настоящему изобретению не является постоянным, как это имеет место в известном линейном дорожном датчике. При проезде колеса АТС по разным участкам известного линейного дорожного датчика величина итогового сигнала, формируемого таким датчиком, будет уменьшаться по мере сдвига колеса к какому-либо концу этого датчика. В соответствии с этим изменением (уменьшением) величины итогового сигнала в известном линейном дорожном датчике - точнее, в обратной зависимости от этого изменения - уменьшается и разнесение дискретных чувствительных элементов 2 в линейном дорожном датчике по настоящему изобретению.
В принципе, сокращение величины разнесения между соседними дискретными чувствительными элементами 2 по мере приближения к концу датчика может осуществляться и иным образом. К примеру, при размещении дискретных чувствительных элементов 2 в двух или более продольных рядах (Фиг. 5) разнесение H дискретных чувствительных элементов 2 может изменяться как в одном, так и в обоих (нескольких) рядах.
Линейный дорожный датчик по настоящему изобретению работает аналогично вышеуказанному ближайшему аналогу.
Линейный дорожный датчик по настоящему изобретению имеет повышенную точность измерения за счет уменьшения разброса показаний. Это повышение точности можно оценить уже в процессе выходного производственного контроля. Естественно, что повышение базовой точности датчика приведет и к соответствующему возрастанию итоговой точности, реализуемой и оцениваемой уже после его установки в дорожное покрытие. Следовательно, настоящее изобретение позволяет принципиально повысить точность измерений линейного дорожного датчика при его работе в конкретных дорожных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2554678C1 |
| ЛИНЕЙНЫЙ ДОРОЖНЫЙ ДАТЧИК ВЕСА | 2014 |
|
RU2564151C1 |
| КОРПУС ДЛЯ ЛИНЕЙНОГО ДОРОЖНОГО ДАТЧИКА | 2014 |
|
RU2564150C1 |
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА (АТС) | 2013 |
|
RU2531655C2 |
| УСТРОЙСТВО ЦИКЛИЧЕСКОГО НАГРУЖЕНИЯ ЛИНЕЙНЫХ ДОРОЖНЫХ ДАТЧИКОВ | 2014 |
|
RU2559301C1 |
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2531654C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕДА АВТОДОРОГАМ ОТ ПЕРЕВОЗКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ | 2014 |
|
RU2568239C1 |
| СПОСОБ И СИСТЕМА ДИНАМИЧЕСКОГО ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2672465C2 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ПРИ ВЗВЕШИВАНИИ АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2012 |
|
RU2494355C1 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2011 |
|
RU2448331C1 |
Изобретение относится к измерительной технике. Техническим результатом изобретения является повышение точности датчика, реализуемой и оцениваемой уже после его установки в дорожное покрытие. Линейный дорожный датчик, размещаемый в дорожном полотне под заранее заданным углом к направлению перемещения АТС, содержит: линейное основание; совокупность дискретных чувствительных элементов, расположенных на линейном основании по его длине с заранее заданным разнесением один от другого и выполненных каждый с возможностью формировать сигнал, концентратор, расположенный поверх совокупности дискретных чувствительных элементов, предназначенный для передачи на них усилия и распределяющий усилие между дискретными чувствительными элементами, лежащими вокруг точки приложения данного усилия. При этом разнесение между соседними дискретными чувствительными элементами, расположенными вблизи любого конца линейного дорожного датчика, уменьшается в направлении этого конца для компенсации уменьшения величины итогового сигнала, формируемого соответствующей совокупностью дискретных чувствительных элементов по мере смещения точки приложения усилия к концу линейного дорожного датчика. 1 з.п. ф-лы, 5 ил.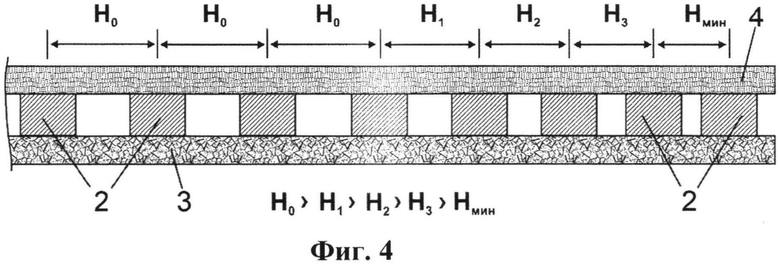
1. Линейный дорожный датчик, предназначенный для взвешивания автотранспортного средства (АТС) и размещаемый в дорожном полотне под заранее заданным углом к направлению перемещения упомянутого АТС, содержащий:
- линейное основание;
- совокупность дискретных чувствительных элементов, расположенных на упомянутом линейном основании по его длине с заранее заданным разнесением один от другого и выполненных каждый с возможностью формировать сигнал, пропорциональный величине приложенного к нему вертикального воздействия;
- концентратор, расположенный поверх упомянутой совокупности дискретных чувствительных элементов, предназначенный для передачи на них усилия, возникающего при проезде колеса упомянутого АТС через упомянутый линейный дорожный датчик, и распределяющий упомянутое усилие между упомянутыми дискретными чувствительными элементами, лежащими вокруг точки приложения данного усилия;
- при этом упомянутое разнесение между соседними дискретными чувствительными элементами, расположенными вблизи любого конца упомянутого линейного дорожного датчика, уменьшается в направлении упомянутого конца для компенсации уменьшения величины итогового сигнала, формируемого соответствующей совокупностью дискретных чувствительных элементов по мере смещения точки приложения упомянутого усилия к упомянутому концу линейного дорожного датчика.
2. Линейный дорожный датчик по п. 1, в котором упомянутые дискретные чувствительные элементы в средней части упомянутого линейного дорожного датчика размещены с одинаковым разнесением один от другого, а упомянутое уменьшение этого разнесения по мере смещения к упомянутому концу линейного дорожного датчика выбрано в обратной зависимости по отношению к изменению величины упомянутого итогового сигнала, имеющего место в линейном дорожном датчике с одинаковым по всей его длине разнесением дискретных чувствительных элементов по мере смещения точки приложения усилия к концу такого линейного дорожного датчика.
| Устройство для подвески съемочных камер круговой панорамы к вертолету | 1959 |
|
SU127913A1 |
| Устройство для подвески съемочных камер круговой панорамы к вертолету | 1959 |
|
SU127913A1 |
| Устройство для регистрации эксплуатационных показателей работы транспортного средства | 1980 |
|
SU951349A1 |
| US 20110127090 А1, 02.06.2011 | |||

