Область техники, к которой относится изобретение
Настоящее изобретение относится к технике взвешивания автотранспортных средств (АТС) в процессе их движения по трассе, а в частности - к способу калибровки автоматических постов весового контроля автомобильного транспорта.
Уровень техники
Взвешивание автотранспортных средств в процессе их движения по трассе приобретает все большее значение как для целей контроля перевозимых грузов, так и для взимания платы за проезд и (или) перегруз.
Обычно автотранспортное средство взвешивается на оборудованной стационарными весами площадке при въезде на платную или контролируемую трассу, а также на аналогичных площадках, организованных на выезде с территории предприятия-грузоотправителя в обслуживаемом режиме. В то же время все большее применение находит автоматическое взвешивание автомобилей непосредственно в процессе их движения по трассе, оборудованной весовыми датчиками, которые дают возможность определять давление на поверхность дороги от каждой проезжающей оси или каждого проезжающего колеса того или иного автотранспортного средства.
Реально реализуемая на практике предельная погрешность взвешивания на обслуживаемых прецизионных постах весового контроля, как мобильных, так и стационарных, расположенных в полосе отвода дороги, и (или) на выезде с территорий предприятий-грузоотправителей на дороги общего пользования, не превышает обычно 2%. Автоматические же посты весового контроля, работающие в пределах полосы движения АТС и без снижения скорости потока транспорта, обеспечивают предельно допустимую погрешность при оценке осевых нагрузок в пределах 11-16%, а при определении общей массы АТС - в пределах 5-10% (см. монографию В.И. Речицкого «Весогабаритный контроль автотранспорта». - М.: Фонд «Наука и жизнь», 2014. - Рис. 2.26, 2.21).
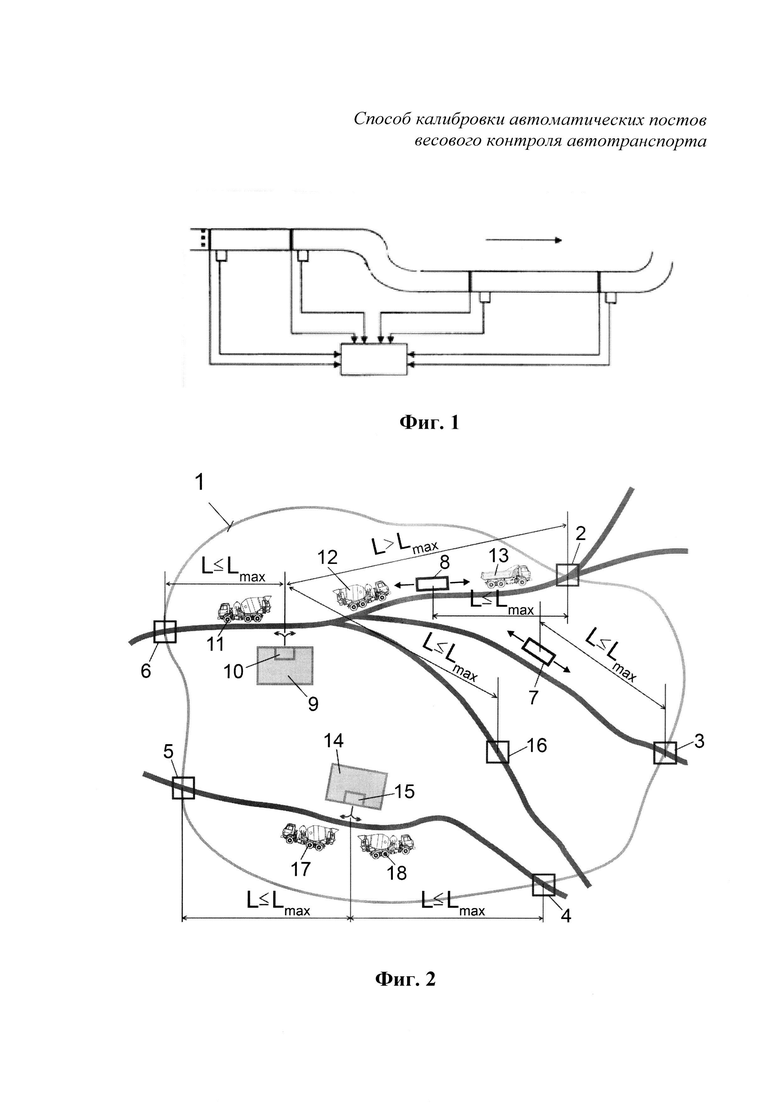
В принципе, менее точные автоматические посты весового контроля можно калибровать по показаниям более точного обслуживаемого поста, в том числе и в цепочке автоматических постов, последовательно расположенных в полосе движения (см. патент РФ №2448331, опубл. 20.04.2012). На Фиг. 1 показана условная схема системы, в которой реализуется способ по этому патенту.
Как показано на Фиг. 1, способ по этому патенту может быть реализован в системе, в которой на трассе (условно показанной односторонней) последовательно установлены последовательно несколько, например четыре, взвешивающих устройства, однако их число, разумеется, не ограничено именно четырьмя. На Фиг. 1 первое взвешивающее устройство условно выделено дополнительной пунктирной линией для того, чтобы подчеркнуть, что данное взвешивающее устройство принято за эталонное, т.к. оно имеет более высокую точность по сравнению с остальными взвешивающими устройствами. Под точностью в данном случае понимается тот факт, что разброс показаний этого взвешивающего устройства, как раз и характеризующий его точность, например, меньше разброса показаний самого точного из остальных взвешивающих устройств. Показания этого устройства в отношении проезжающего АТС принимают за эталонное взвешивающее устройство, а его показания принимают за эталонные показания и калибруют по ним остальные взвешивающие устройства, последовательно проходимые тем же АТС.
Однако выбор среди практически идентичных автоматических постов весового контроля, установленных в одноименной полосе движения вдоль направления движения АТС, наиболее прецизионного из общей совокупности и реально пригодного для измерения веса АТС, рассматриваемого далее в виде эталонного объекта калибровки, трудно реализовать на практике. Например, использование в составе автоматического поста весового контроля трех идентичных последовательно установленных наиболее прецизионных из известных на мировом рынке линейных весовых датчиков на пьезокристаллических чувствительных элементах вместо традиционных для массовой реализации двух таких датчиков увеличит точность измерения осевой нагрузки максимум на 2%, т.е. с 11-12% до 9-10%. Установка же четвертого датчика, как показывает практика, дальнейшего увеличения точности не обеспечит вовсе.
Раскрытие изобретения
Таким образом, задачей, решаемой настоящим изобретением, является существенное повышение точности автоматических постов весового контроля.
Для решения этой задачи и достижения указанного технического результата в настоящем изобретении предложен способ калибровки автоматических постов весового контроля автотранспорта, входящих в состав группы с по меньшей мере одним обслуживаемым прецизионным постом весового контроля, реализующим намного более высокую точность, нежели у калибруемых автоматических постов весового контроля, заключающийся в том, что: соединяют все калибруемые автоматические и обслуживаемые прецизионные посты весового контроля в пределах контролируемого ареала с помощью по меньшей мере одной информационной сети в систему, имеющую в своем составе центр обработки данных; взвешивают конкретное автотранспортное средство (АТС) на одном из обслуживаемых прецизионных постов весового контроля; передают через центр обработки данных по меньшей мере весовые параметры АТС, взвешенного на обслуживаемом прецизионном посту весового контроля и именуемого далее эталонным АТС, на все калибруемые автоматические посты весового контроля в пределах зоны калибровки данного обслуживаемого прецизионного поста; корректируют показания, получаемые при взвешивании эталонного АТС любым калибруемым автоматическим постом весового контроля в зоне калибровки, путем приравнивания этих показаний к переданным весовым параметрам соответствующей автоматической регулировкой измерительных средств данного калибруемого автоматического весового поста.
Особенность способа по настоящему изобретению состоит в том, что каждая из зон калибровки может включать калибруемые автоматические посты весового контроля, расположенные на расстояниях от соответствующего обслуживаемого прецизионного поста меньше, чем расстояние, на котором изменение общей массы эталонного АТС за счет дестабилизирующих факторов не превышает заранее заданного значения.
При этом дестабилизирующие факторы могут включать по меньшей мере одно из следующего: расход топлива, изменение температуры окружающего воздуха, изменение влажности окружающего воздуха, атмосферные осадки, а заранее заданное значение может составлять не более 2%.
Еще одна особенность способа по настоящему изобретению состоит в том, что обслуживаемый прецизионный пост могут устанавливать непосредственно на выезде из предприятия-грузоотправителя либо на внешней границе контролируемого ареала.
Еще одна особенность способа по настоящему изобретению состоит в том, что в качестве информационной сети могут использовать проводную либо беспроводную сеть связи.
Еще одна особенность способа по настоящему изобретению состоит в том, что упомянутый центр обработки данных могут снабжать блоком памяти для хранения результатов взвешивания всех АТС с соответствующими идентификаторами каждого из этих АТС.
Наконец, еще одна особенность способа по настоящему изобретению состоит в том, что на любом из постов весового контроля дополнительно к весовым параметрам АТС определяют его габаритные параметры и передают их вместе с весовыми параметрами.
Краткое описание чертежей
Изобретение иллюстрируется далее чертежами.
На Фиг. 1 показана условная схема известной системы.
На Фиг. 2 приведена условная схема, позволяющая реализовать способ по настоящему изобретению.
На Фиг. 3 приведена блок-схема алгоритма реализации способа по настоящему изобретению.
Подробное описание изобретения
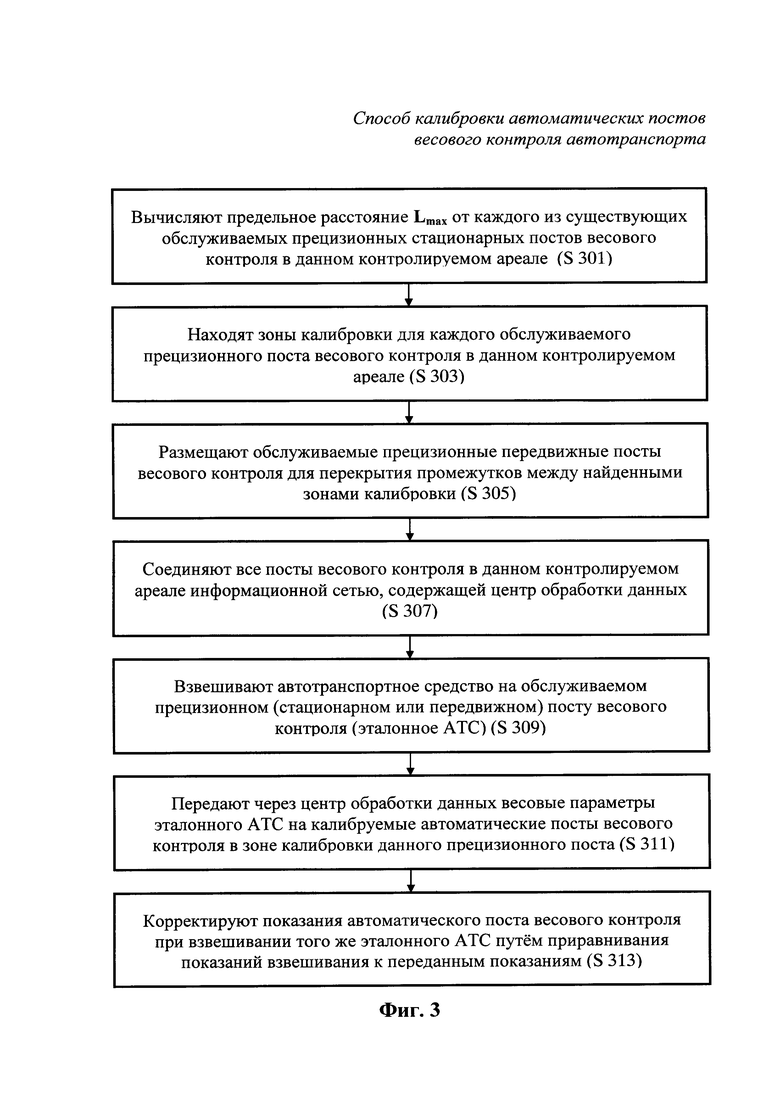
Способ калибровки автоматических постов весового контроля автотранспорта по настоящему изобретению может быть реализован в системе, иллюстративный пример которой показан на Фиг. 2.
Ссылочная позиция 1 на Фиг. 2 обозначает границы контролируемого ареала, под которым можно подразумевать, например, область или крупное муниципальное образование. В точках пересечения границы 1 контролируемого ареала с выходящими за его пределы дорогами, например, регионального (реже - межмуниципального) значения, могут располагаться автоматические посты 2-6 весового контроля, контролирующие грузопоток, как правило, в обоих направлениях. В пределах ареала могут располагаться стационарные (на Фиг. 2 не отображены), передвижные весовые посты 7, 8 и автоматические весовые посты (на Фиг. 2 показан только один из них, обозначенный ссылочной позицией 16). Ссылочными позициями 9 и 14 обозначены два типичных для любого региона предприятия-грузоотправителя, например бетонные заводы, имеющие должным образом аттестованные посты 10, 15 весового контроля. Величина Lmax во всех случаях обозначает предельное расстояние, на котором возможна калибровка автоматического поста весового контроля по показаниям ближайшего к нему обслуживаемого прецизионного поста весового контроля - стационарного, передвижного или контрольного поста на выходе предприятия-грузоотправителя.
Например, автоматический пост 16 весового контроля может калиброваться в полосе движения, направленной к ближайшей к нему границе 1 ареала, по мере прохождения через него АТС, ранее прошедшего контроль на прецизионном весовом посту 10 грузоотправителя 9. Автоматический пост 2 весового контроля может калиброваться по показаниям передвижного обслуживаемого прецизионного поста 8 весового контроля при прохождении в этом направлении АТС 13, а пост 3 - с помощью передвижного обслуживаемого прецизионного поста 7 весового контроля. Автоматический пост 6 весового контроля может калиброваться по мере прохождения через него АТС 12, прошедшего контроль на весовом посту 10 грузоотправителя 9. Автоматические посты 4 и 5 весового контроля могут калиброваться по мере прохождения через них АТС 17, 18, прошедших контроль на весовом посту 15 грузоотправителя 14.
Указанная выше величина Lmax выбирается из условия, чтобы изменение общей массы эталонного АТС за счет дестабилизирующих факторов не превышало заранее заданного значения, например 2% (хотя это значение может составлять, к примеру, 1% или 5%). Что касается дестабилизирующих факторов, то они могут быть, например, такими: расход топлива, изменение температуры окружающего воздуха, изменение влажности окружающего воздуха, атмосферные осадки. К примеру, из-за повышенной влажности или идущего дождя перевозимый автотранспортным средством песок может стать тяжелее, а из-за расхода топлива общий вес АТС может уменьшиться. При этом погрешность калибровки необходимо будет отсчитывать, отталкиваясь от совокупности измерительной погрешности обслуживаемого прецизионного поста и процентной величины изменения массы АТС на предельной протяженности Lmax зоны калибровки.
Заметим, что число циклов калибровки в сутки, с учетом интенсивности прохождения через автоматический пост эталонных АТС, может составить до 10 и более, причем как в дневное, так и в ночное время, что позволит учитывать меняющиеся в течение суток температурные и прочие изменения режима работы автоматических постов весового контроля.
Способ калибровки автоматических постов весового контроля автотранспорта по настоящему изобретению осуществляется следующим образом (Фиг. 3).
Сначала производят вычисление предельного расстояния Lmax от каждого из существующих обслуживаемых прецизионных стационарных постов весового контроля в данном контролируемом ареале (S 301). Для этого учитывают такие дестабилизирующие факторы как расход топлива, атмосферные условия и т.п. с тем, чтобы изменение веса эталонного АТС при перемещении по дороге на предельное расстояние Lmax не превышало, скажем, 2%, либо иного наперед заданного значения.
Затем находят зоны калибровки для каждого обслуживаемого прецизионного поста весового контроля в данном контролируемом ареале (S 303) как области, ограниченные вдоль автотранспортных дорог указанным предельным расстоянием Lmax.
Поскольку при нахождении зон калибровки для каждого обслуживаемого прецизионного поста весового контроля могут образовываться промежутки между этими зонами калибровки для соседних обслуживаемых прецизионных постов, для перекрытия промежутков между найденными зонами калибровки размещают, например, обслуживаемые прецизионные передвижные посты весового контроля (S 305). Практически это может означать, к примеру, оборудование площадок в полосе отвода автодороги для размещения там передвижного поста весового контроля, зона калибровки которого сможет перекрыть промежуток между зонами калибровки соседних стационарных прецизионных постов. Если зона калибровки одного передвижного поста недостаточна для этого, на дороге могут размещать два и более передвижных постов.
После этого согласно предложенному способу соединяют все посты весового контроля в данном контролируемом ареале, например в области или крупном муниципальном образовании информационной сетью так, что указанные посты весового контроля образуют систему, содержащую центр обработки данных (S 307). Информационная сеть может быть проводной или беспроводной, либо могут использоваться несколько разных сетей.
Собственно же калибровка автоматических постов весового контроля по настоящему изобретению происходит так.
На обслуживаемом прецизионном (стационарном или передвижном) посту весового контроля взвешивают автотранспортное средство (эталонное АТС) (S 309). Полученные весовые параметры эталонного АТС передают через центр обработки данных на все калибруемые автоматические посты весового контроля в зоне калибровки данного прецизионного поста (S 311). По принятым весовым параметрам эталонного АТС корректируют показания того автоматического поста весового контроля, который взвешивает то же эталонное АТС, когда оно доезжает до данного автоматического поста. Коррекция осуществляется путем приравнивания получаемых показаний взвешивания к переданным показаниям (S 313). При этом, разумеется, осуществляется соответствующая регулировка измерительного средства калибруемого автоматического поста весового контроля, как это известно специалистам.
Таким образом, может решаться проблема калибровки практически всех автоматических постов весового контроля, расположенных в границах контролируемого ареала. Естественно, что реальная ситуация будет опираться на гораздо большее число прецизионных постов на предприятиях-грузоотправителях (можно предположить, что темпы роста их числа будут значительно опережать рост числа стационарных и передвижных постов на дорожной сети ареала).
Реальный выигрыш при использовании способа по настоящему изобретению - практически кратное снижение погрешности измерений автоматических весовых постов. Даже сохранение заданного уровня погрешности автоматического поста весового контроля в течение межповерочного интервала само по себе является достойным результатом использования настоящего изобретения. Дополнительное же увеличение точности измерения откроет возможность использования более экономичных весовых датчиков, сократив стоимость конкретного автоматического поста весового контроля минимум в полтора-два раза, а стоимость процедуры штатной замены весовых датчиков (проводимой, обычно, раз в 2-2,5 года) уменьшится минимум в три-четыре раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДИНАМИЧЕСКОГО ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2672465C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВРЕДА АВТОДОРОГАМ ОТ ПЕРЕВОЗКИ ТЯЖЕЛОВЕСНЫХ ГРУЗОВ | 2014 |
|
RU2568239C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОГО ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2584715C1 |
| СПОСОБ И КОМПЛЕКТ ДЛЯ СТАТИЧЕСКОГО ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2538357C1 |
| СПОСОБ ВЕСОВОГО КОНТРОЛЯ ЛОКАЛЬНОЙ ГРУППЫ АВТОТРАНСПОРТНЫХ СРЕДСТВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2605531C1 |
| ЛИНЕЙНЫЙ ДОРОЖНЫЙ ДАТЧИК | 2014 |
|
RU2557434C1 |
| ДАТЧИК ВЕСА АВТОТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2554678C1 |
| ЛИНЕЙНЫЙ ДОРОЖНЫЙ ДАТЧИК ВЕСА | 2014 |
|
RU2564151C1 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2011 |
|
RU2448331C1 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ПРИ ВЗВЕШИВАНИИ АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2012 |
|
RU2494355C1 |
Изобретение относится к измерительной технике, в частности к технике взвешивания автотранспортных средств (АТС) в процессе их движения по трассе. Способ заключается в том, что: соединяют все калибруемые автоматические и обслуживаемые прецизионные посты весового контроля в пределах контролируемого ареала с помощью, по меньшей мере, одной информационной сети в систему, имеющую в своем составе центр обработки данных. Затем взвешивают конкретное автотранспортное средство (АТС) на одном из обслуживаемых прецизионных постов весового контроля; передают через центр обработки данных весовые параметры АТС, взвешенного на обслуживаемом прецизионном посту весового контроля и именуемого далее эталонным АТС, на все калибруемые автоматические посты весового контроля в пределах зоны калибровки данного обслуживаемого прецизионного поста. После этого корректируют показания, получаемые при взвешивании эталонного АТС любым калибруемым автоматическим постом весового контроля в зоне калибровки, путем приравнивания этих показаний к переданным весовым параметрам соответствующей автоматической регулировкой измерительных средств данного калибруемого автоматического весового поста. Технический результат заключается в повышении точности автоматических постов весового контроля. 8 з.п. ф-лы, 3 ил. 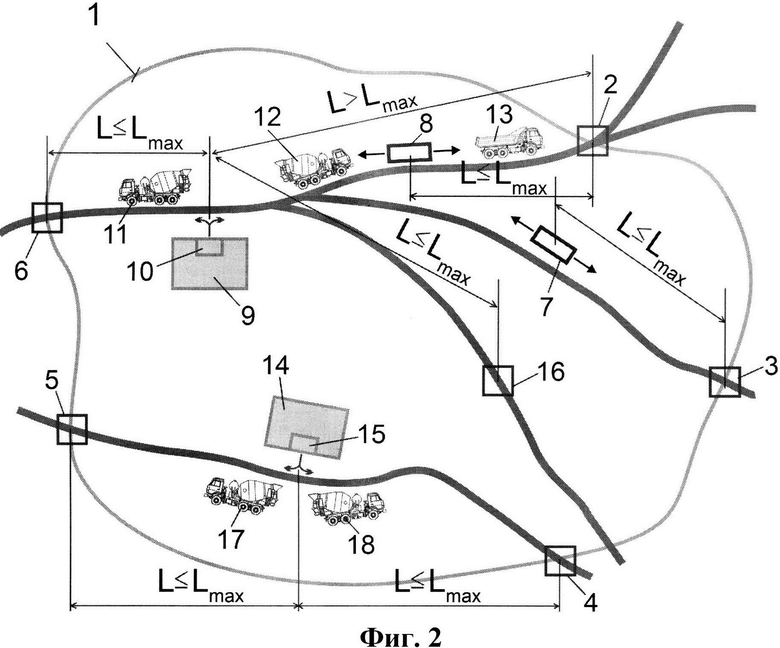
1. Способ калибровки автоматических постов весового контроля автотранспорта, входящих в состав группы с по меньшей мере одним обслуживаемым прецизионным постом весового контроля, реализующим намного более высокую точность, нежели у калибруемых автоматических постов весового контроля, заключающийся в том, что:
- соединяют все калибруемые автоматические и обслуживаемые прецизионные посты весового контроля в пределах контролируемого ареала с помощью по меньшей мере одной информационной сети в систему, имеющую в своем составе центр обработки данных;
- взвешивают конкретное автотранспортное средство (АТС) на одном из обслуживаемых прецизионных постов весового контроля;
- передают через упомянутый центр обработки данных по меньшей мере весовые параметры АТС, взвешенного на обслуживаемом прецизионном посту весового контроля и именуемого далее эталонным АТС, на все калибруемые автоматические посты весового контроля в пределах зоны калибровки данного обслуживаемого прецизионного поста;
- корректируют показания, получаемые при взвешивании упомянутого эталонного АТС любым калибруемым автоматическим постом весового контроля в упомянутой зоне калибровки, путем приравнивания этих показаний к упомянутым переданным весовым параметрам соответствующей автоматической регулировкой измерительных средств данного калибруемого автоматического весового поста.
2. Способ по п. 1, в котором каждая из упомянутых зон калибровки включает калибруемые автоматические посты весового контроля, расположенные на расстояниях от соответствующего обслуживаемого прецизионного поста меньше, чем расстояние, на котором изменение общей массы эталонного АТС за счет дестабилизирующих факторов не превышает заранее заданного значения.
3. Способ по п. 2, в котором упомянутые дестабилизирующие факторы включают по меньшей мере одно из следующего: расход топлива, изменение температуры окружающего воздуха, изменение влажности окружающего воздуха, атмосферные осадки.
4. Способ по п. 2, в котором упомянутое заранее заданное значение составляет не более 2%.
5. Способ по п. 1, в котором упомянутый обслуживаемый прецизионный пост устанавливают непосредственно на выезде из предприятия-грузоотправителя.
6. Способ по п. 1, в котором упомянутый обслуживаемый прецизионный пост устанавливают на внешней границе контролируемого ареала.
7. Способ по п. 1, в котором в качестве упомянутой информационной сети используют проводную либо беспроводную сеть связи.
8. Способ по п. 1, в котором снабжают упомянутый центр обработки данных блоком памяти для хранения результатов взвешивания всех АТС с соответствующими идентификаторами каждого из этих АТС.
9. Способ по п. 1, в котором на любом из упомянутых постов весового контроля дополнительно к весовым параметрам АТС определяют его габаритные параметры и передают их вместе с упомянутыми весовыми параметрами.
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ ТОЧНОСТИ ВЗВЕШИВАНИЯ АВТОТРАНСПОРТНОГО СРЕДСТВА В ДВИЖЕНИИ | 2011 |
|
RU2448331C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭКСПЛУАТАЦИИ ТРАНСПОРТНЫХ СРЕДСТВ И РЕГИСТРАТОР ПАРАМЕТРОВ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2333537C1 |
| US 4712423 A1 15.12.1987. | |||

