Область техники
[0001] Данное изобретение в целом относится к области техники обработки данных, и более конкретно, к способу и устройству для уборки.
Предпосылки создания изобретения
[0002] С быстрым развитием науки и техники все более интеллектуальные домашние приборы вошли в десятки тысяч домашних хозяйств, улучшая комфорт и удобство проживающих людей. Например, чтобы уменьшать затраты труда, необходимые для уборки помещений, все больше и больше людей хотят использовать уборочные машины для уборки помещений.
[0003] В известном уровне техники, чтобы избегать столкновения с предметами домашней обстановки, расположенными в помещении, уборочная машина может сканировать область, которая должна быть очищена, инфракрасными или ультразвуковыми лучами, чтобы обнаружить предметы обстановки, появляющиеся на пути уборки. Если при уборке помещения уборочная машина сталкивается с предметом обстановки, она может автоматически выполнять поворот, чтобы избежать во время уборки столкновения с этим предметом обстановки.
Сущность изобретения
[0004] Чтобы устранить недостатки в известном уровне техники, формы осуществления данного изобретения предлагают способ уборки и устройство уборки. Техническое решение приводится ниже.
[0005] Согласно первому аспекту форм осуществления данного изобретения предлагается способ уборки, применяемый в уборочной машине. Способ заключается в том, что:
[0006] получают план очищаемой зоны, идентифицирующий препятствие в очищаемой зоне;
[0007] определяют неочищенную зону, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне согласно плану;
[0008] определяют, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной; и
[0009] удаляют уборочной машиной препятствие и очищают ею неочищенную зону, если препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной.
[0010] Полезные результаты, обеспечиваемые формой осуществления данного изобретения, включает приводимые ниже. Если с препятствием сталкиваются во время уборки, зона может быть отмечена как неочищенная зона, и если определяют, что препятствие, расположенное в зоне, может быть удалено, препятствие удаляют и зону очищают. Это может улучшить гибкость при уборке помещения, обеспечить качество уборки и улучшить впечатление пользователя.
[0011] В одной форме осуществления изобретения определение, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной, включает:
[0012] определение предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне;
[0013] определение типа предмета обстановки, причем типы включают передвижные или стационарные предметы обстановки; и
[0014] подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если типом предмета обстановки является передвижной предмет обстановки.
[0015] Полезные результаты, обеспечиваемые формой осуществления данного изобретения, включает приводимые ниже. Определение, может ли препятствие быть удалено согласно типу предмета обстановки, представляющего препятствие, может улучшить удобство и точность определения свойства перемещаемости препятствия.
[0016] В другой форме осуществления изобретения подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если типом предмета обстановки является передвижной предмет обстановки, включает:
[0017] определение, является ли предмет обстановки заданным предметом обстановки, если типом предмета обстановки является передвижной предмет обстановки; и
[0018] подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если предмет обстановки является заданным предметом обстановки.
[0019] Полезные результаты, обеспечиваемые формой осуществления данного изобретения, включает приводимые ниже. Если определяют, что тип предмета обстановки, представляющего препятствие, является передвижным предметом обстановки, может быть далее определено, является ли предмет обстановки заданным предметом обстановки. Если предмет обстановки является заданным предметом обстановки, то подтверждением, что это препятствие, расположенное в неочищенной зоне, может быть удалено, избегают нечаянного повреждения, вызванного перемещением во время уборки предмета обстановки, такого как детская коляска или ваза.
[0020] В еще одной форме осуществления изобретения определение типа предмета обстановки включает:
[0021] получение соответствия между предметами обстановки и их типами, причем соответствие описывает типы различных предметов обстановки; и
[0022] получение типа предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, согласно соответствию между предметами обстановки и их типами.
[0023] Полезные результаты, обеспечиваемые формой осуществления данного изобретения, включает приводимые ниже. Согласно соответствию между предметами обстановки и их типами определяют тип предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне. Таким образом, это может улучшить удобство и точность при определении типа предмета обстановки.
[0024] В еще одной форме осуществления изобретения определение, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной, включает:
[0025] определение, находится ли размер этого препятствия в пределах заданного диапазона размеров; и
[0026] подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если размер этого препятствия находится в пределах заданного диапазона размеров.
[0027] Полезные результаты, обеспечиваемые формой осуществления данного изобретения, включает приводимые ниже. Определение, может ли препятствие быть удалено согласно размеру препятствия, может улучшить удобство и точность определения способности препятствия к перемещению.
[0028] В еще одной форме осуществления изобретения подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если размер этого препятствия находится в пределах заданного диапазона размеров, включает:
[0029] получение толкающего усилия, необходимого для перемещения препятствия, если размер этого препятствия находится в пределах заданного диапазона размеров; и
[0030] подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия.
[0031] Полезные результаты, обеспечиваемые формой осуществления данного изобретения, включает приводимые ниже. Определение, может ли препятствие быть удалено согласно размеру препятствия и величины толкающего усилия, необходимого для перемещения препятствия. Это может улучшить удобство и точность определения способности препятствия к перемещению.
[0032] В еще одной форме осуществления изобретения, способ уборки может дополнительно включать:
[0033] перемещение препятствия в первоначальное положение в ранее неочищенной зоне после завершения уборки.
[0034] Полезные результаты, обеспечиваемые формой осуществления данного изобретения, включает приводимые ниже. После того, как уборка закончена, препятствие может быть перемещено в первоначальное положение, чтобы облегчить использование для пользователя, и сохранить планировку помещения на основании привычек пользователя в дополнение к полной уборке помещения, что может улучшить впечатление пользователя.
[0035] Согласно второму аспекту форм осуществления данного изобретения предлагается устройство уборки, содержащее:
[0036] первый модуль получения, выполненный с возможностью получения плана очищаемой зоны, идентифицирующего препятствие в очищаемой зоне;
[0037] первый модуль определения, выполненный с возможностью определения неочищенной зоны, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне согласно плану;
[0038] второй модуль определения, выполненный с возможностью определения, может ли быть удалено уборочной машиной препятствие, расположенное в неочищенной зоне; и
[0039] модуль удаления-уборки, выполненный с возможностью удаления препятствия и уборки неочищенной зоны, если препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной.
[0040] В еще одной форме осуществления изобретения второй модуль определения содержит:
[0041] первый субмодуль определения, выполненный с возможностью определения предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне;
[0042] второй субмодуль определения, выполненный с возможностью определения типа предмета обстановки, причем типы включают передвижные или стационарные предметы обстановки; и
[0043] первый субмодуль подтверждения, выполненный с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если типом предмета обстановки является передвижной предмет обстановки.
[0044] В еще одной форме осуществления изобретения, первый субмодуль подтверждения содержит:
[0045] блок определения, выполненный с возможностью определения, является ли предмет обстановки заданным предметом обстановки, если типом предмета обстановки является передвижной предмет обстановки; и
[0046] первый блок подтверждения, выполненный с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если предмет обстановки является заданным предметом обстановки.
[0047] В еще одной форме осуществления изобретения второй субмодуль определения включает:
[0048] первый блок получения, выполненный с возможностью получения соответствия между предметами обстановки и их типами, причем соответствие описывает типы различных предметов обстановки; и
[0049] второй блок получения, выполненный с возможностью получения типа предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, согласно соответствию между предметами обстановки и их типами.
[0050] В еще одной форме осуществления изобретения, второй модуль определения содержит:
[0051] третий субмодуль определения, выполненный с возможностью определения, находится ли размер препятствия, расположенного в неочищенной зоне, в пределах заданного диапазона размеров; и
[0052] второй субмодуль подтверждения, выполненный с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если размер этого препятствия находится в пределах заданного диапазона размеров.
[0053] В еще одной форме осуществления изобретения второй субмодуль подтверждения содержит:
[0054] третий блок получения, выполненный с возможностью получения толкающего усилия, необходимого для удаления препятствия, если размер препятствия, расположенного в неочищенной зоне, находится в пределах заданного диапазона размеров; и
[0055] второй блок подтверждения, выполненный с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия.
[0056] В еще одной форме осуществления изобретения устройство уборки дополнительно содержит:
[0057] модуль восстановления, выполненный с возможностью перемещения препятствия в первоначальное положение в ранее неочищенной зоне после завершения уборки.
[0058] Согласно третьему аспекту форм осуществления данного изобретения предлагается устройство уборки, содержащее:
[0059] процессор; и
[0060] запоминающее устройство для хранения команд, выполняемых процессором;
[0061] причем процессор выполнен с возможностью:
[0062] определения неочищенной зоны, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне согласно плану;
[0063] определения, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной; и
[0064] удаления уборочной машиной препятствия и уборки ею неочищенной зоны, если препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной.
[0065] Согласно четвертому аспекту форм осуществления данного изобретения предлагается машиночитаемый носитель данных, имеющий хранящиеся на нем команды, которые при выполнении процессором устройства заставляют устройство осуществлять шаги способа согласно формам осуществления первого аспекта.
[0066] Должно быть понятно, что и предшествующее общее описание и нижеследующее подробное описание приводятся только в качестве примера и не являются ограничивающими данное изобретение.
Краткое описание чертежей
[0067] Прилагаемые чертежи, которые включены в это описание и составляют его часть, поясняют формы осуществления согласно данному изобретению и вместе с описанием служат для объяснения принципов данного изобретения.
[0068] На фиг. 1а показана блок-схема, иллюстрирующая способ уборки согласно примеру осуществления изобретения.
[0069] На фиг. 1b показана блок-схема, иллюстрирующая способ уборки согласно примеру осуществления изобретения.
[0070] На фиг. 1с показана блок-схема, иллюстрирующая способ уборки согласно примеру осуществления изобретения.
[0071] На фиг. 2 показана блок-схема, иллюстрирующая способ уборки согласно примеру осуществления изобретения.
[0072] На фиг. 3 показана блок-схема, иллюстрирующая способ уборки согласно примеру осуществления изобретения.
[0073] На фиг. 4а показана блок-схема, иллюстрирующая устройство уборки согласно примеру осуществления изобретения.
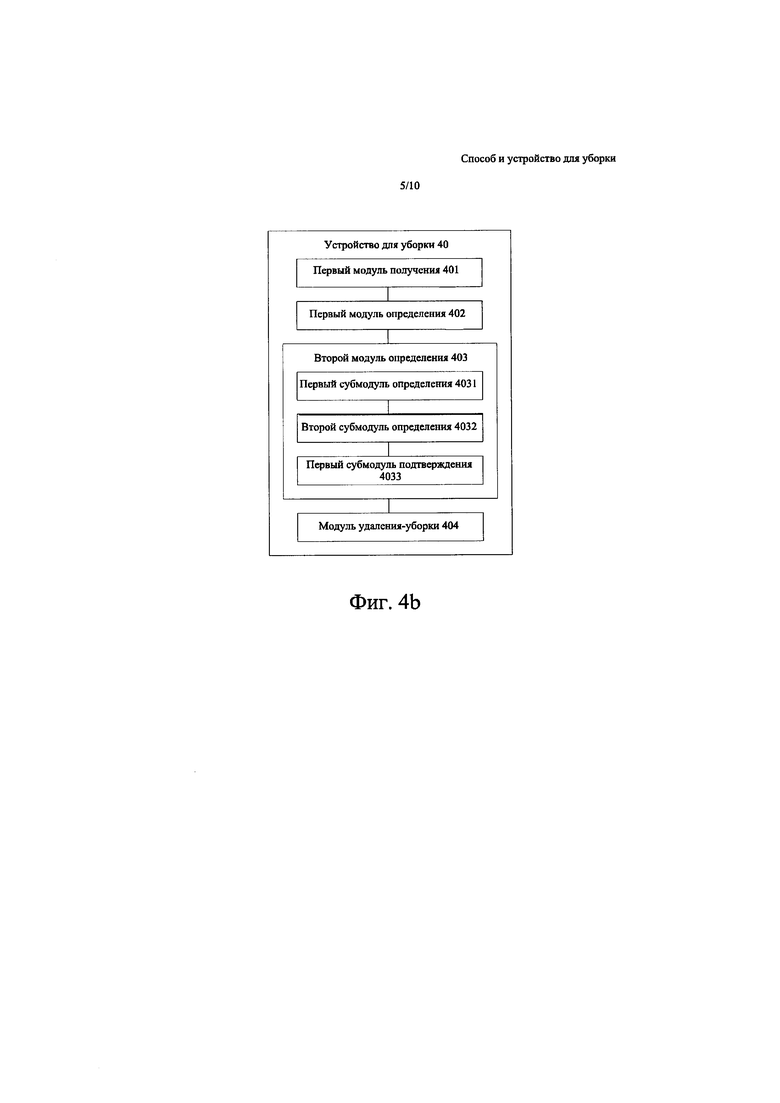
[0074] На фиг. 4b показана блок-схема, иллюстрирующая устройство уборки согласно примеру осуществления изобретения.
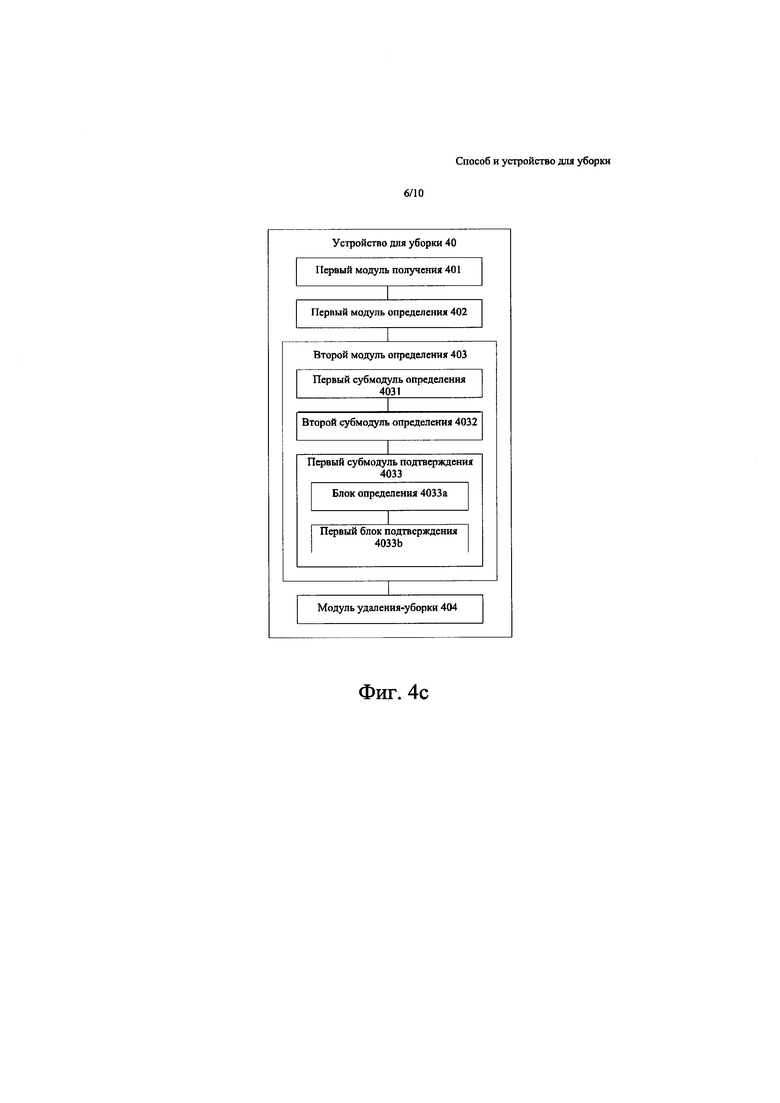
[0075] На фиг. 4с показана блок-схема, иллюстрирующая устройство уборки согласно примеру осуществления изобретения.
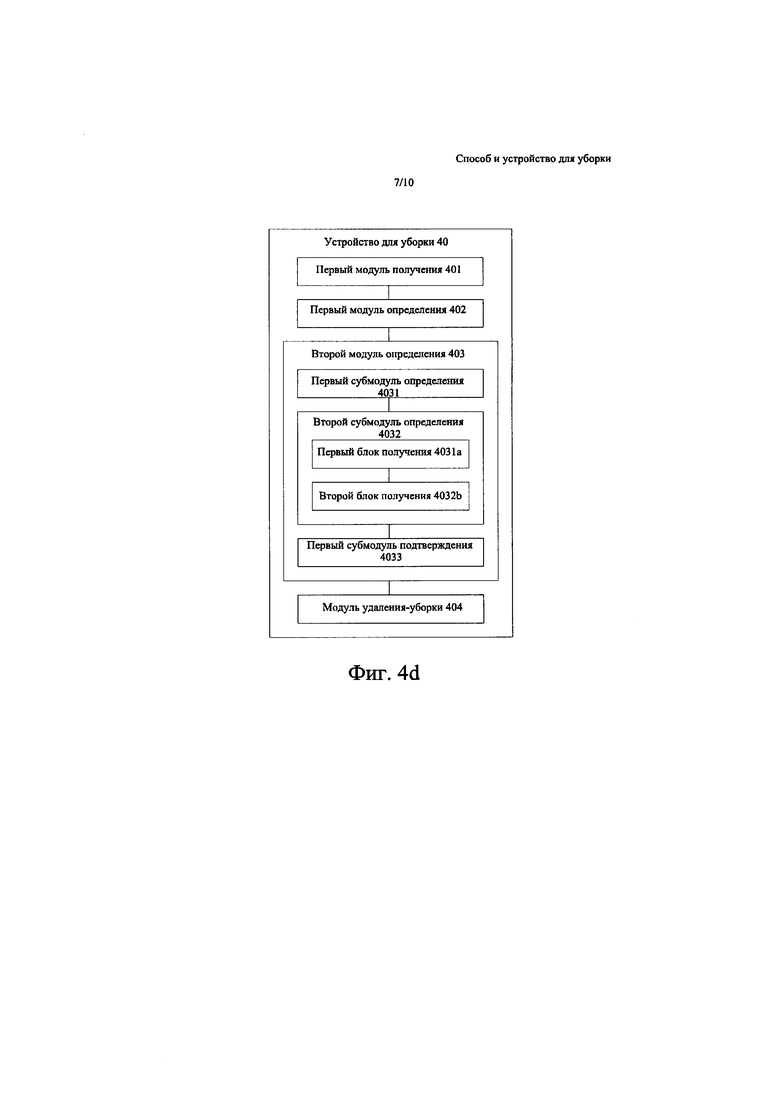
[0076] На фиг. 4d показана блок-схема, иллюстрирующая устройство уборки согласно примеру осуществления изобретения.
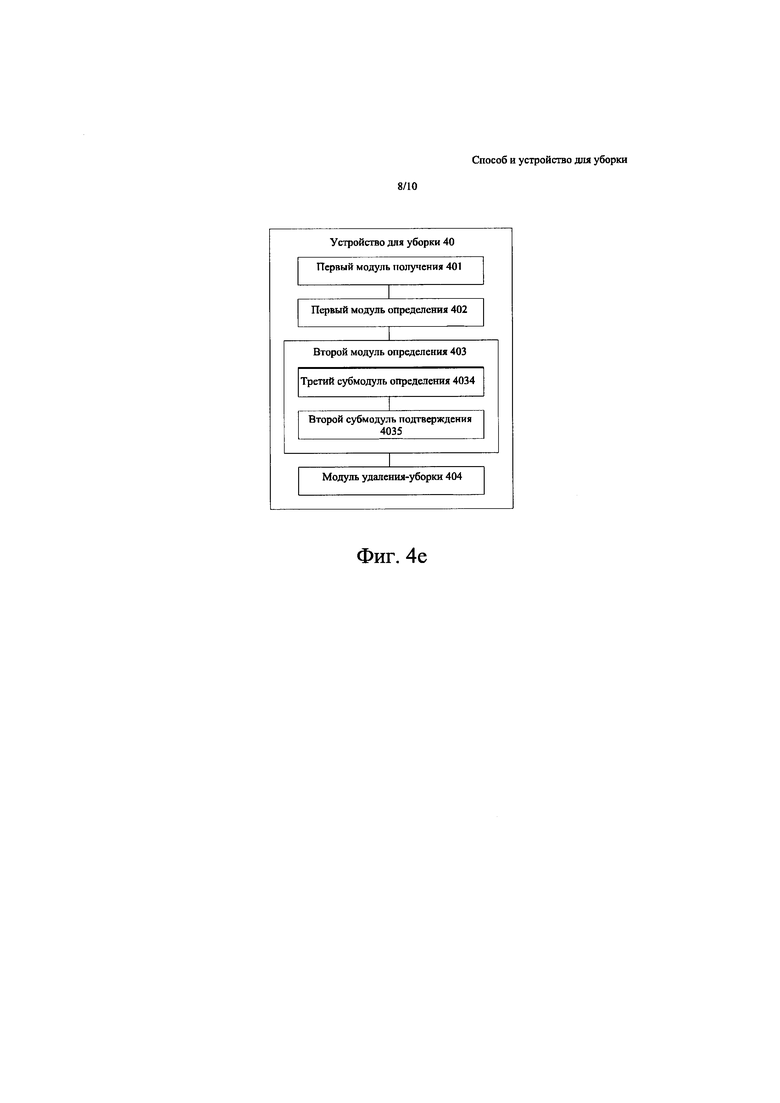
[0077] На фиг. 4е показана блок-схема, иллюстрирующая устройство уборки согласно примеру осуществления изобретения.
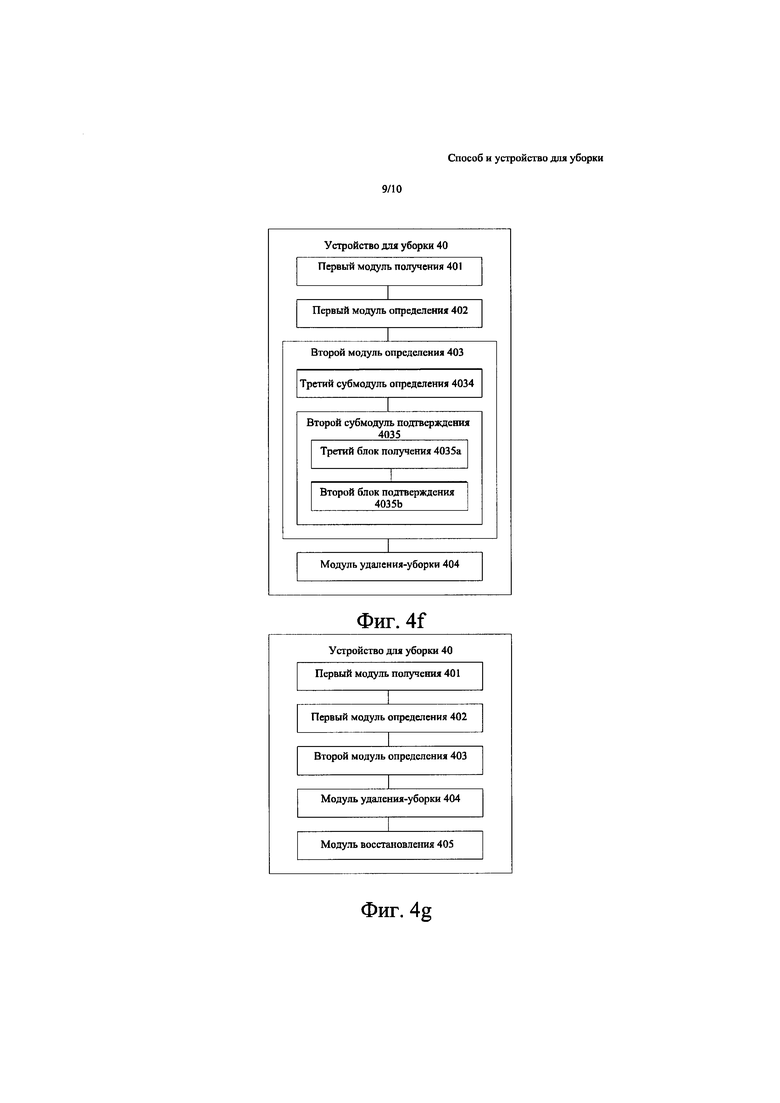
[0078] На фиг. 4f показана блок-схема, иллюстрирующая устройство уборки согласно примеру осуществления изобретения.
[0079] На фиг. 4g показана блок-схема, иллюстрирующая устройство уборки согласно примеру осуществления изобретения.
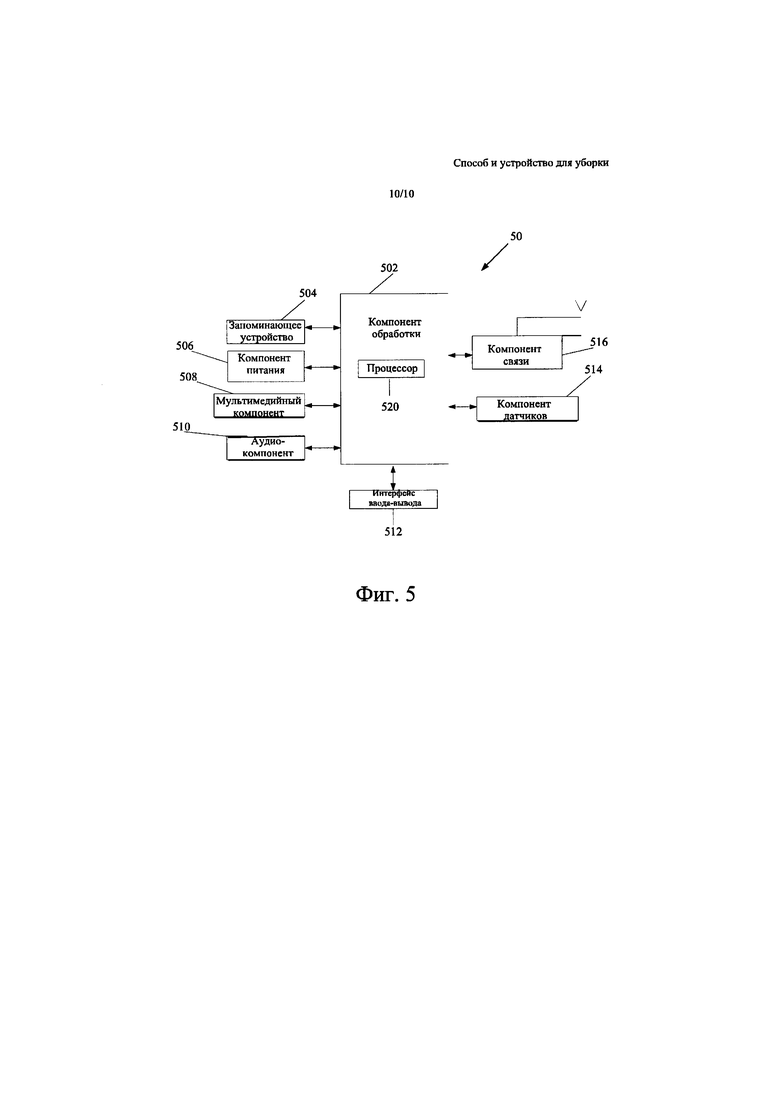
[0080] На фиг. 5 показана блок-схема, иллюстрирующая устройство уборки согласно примеру осуществления изобретения.
Подробное описание
[0081] Ниже будут сделаны ссылки на примеры осуществления изобретения, которые показаны на прилагаемых чертежах. Следующее описание ссылается на прилагаемые чертежи, на которых одинаковые номера позиций на различных чертежах представляют одинаковые или подобные элементы, если не указано иное. Реализации, изложенные в нижеследующем описании примеров осуществления изобретения, не представляют все реализации согласно изобретению. Вместо этого они представляют просто примеры устройств и способов согласно аспектам, связанным с изобретением, как оно описано в прилагаемой формуле изобретения.
[0082] Техническое решение, предлагаемое в еще одной форме осуществления данного изобретения, относится к уборочной машине, то есть роботу-уборщику. Уборочная машина может быть связана с терминалом посредством инфракрасной линии связи, Bluetooth или сетей беспроводной связи. В известном уровне техники, если уборочная машина сталкивается с препятствием при уборке помещения, уборочная машина может объехать препятствие и очистить его окрестности. Однако на полу могут находиться некоторые легкие и обычные предметы обстановки, такие как стулья или мусорные корзины, облегчающие действия пользователя в помещении. Если уборочная машина объезжает стул или мусорную корзину при столкновении со стулом или мусорной корзиной, то пол, временно занятый стулом или мусорной корзиной, не может быть очищен уборочной машиной, что вызывает плохое впечатление у пользователя. В техническом решении, предлагаемом в еще одной форме осуществления данного изобретения, если уборочная машина сталкивается с препятствием во время уборки, то уборочная машина может отмечать зону как неочищенную зону, и если определяют, что препятствие, расположенное в зоне, может быть удалено, то она удаляет препятствие и очищает зону. Это может улучшить гибкость при уборке помещения, гарантировать качество уборки, и улучшить впечатление пользователя.
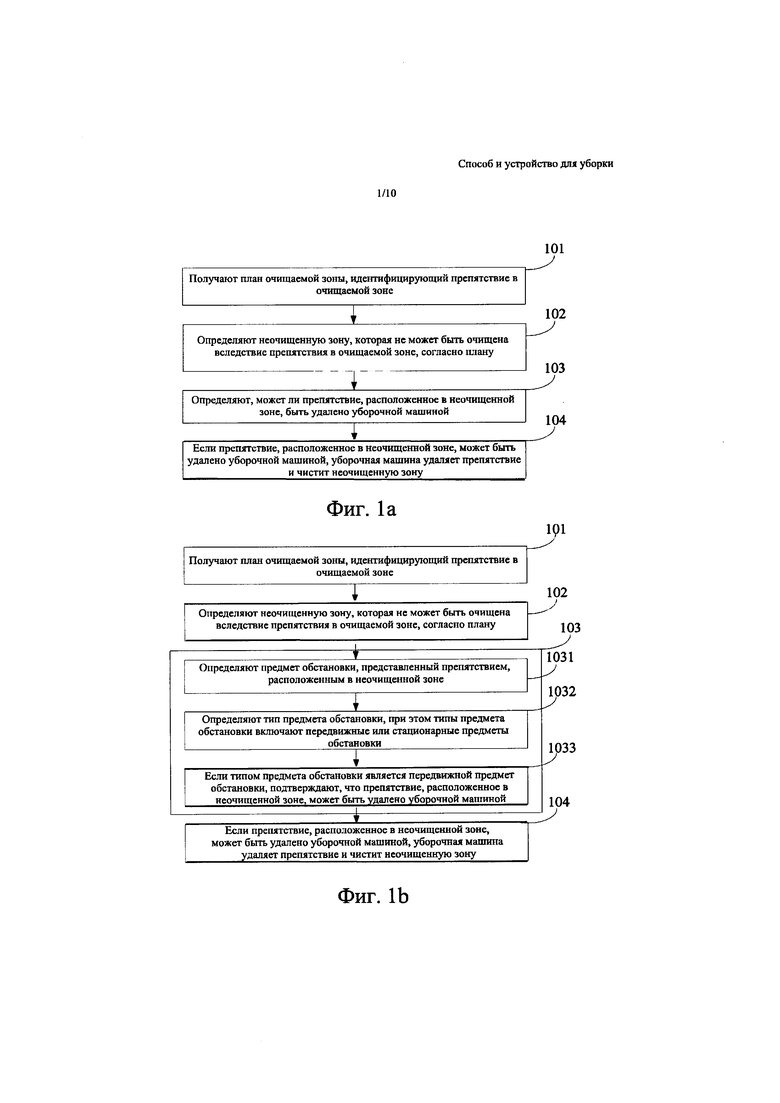
[0083] На фиг. 1а показана блок-схема, иллюстрирующая способ уборки согласно примеру осуществления изобретения. Способ применяется в уборочной машине, то есть, в роботе-уборщике. Как показано на фиг. 1а, способ уборки включает следующие шаги 101-104.
[0084] На шаге 101 получают план очищаемой зоны, идентифицирующий препятствие в очищаемой зоне.
[0085] Например, если уборочная машина очищает помещение, уборочная машина может столкнуться с множеством препятствий, таких как углы предмета обстановки или его опорные детали. Если препятствие обнаружено, оно может быть отмечено на плане помещения согласно площади основания препятствия. В частности, уборочная машина может решить, что столкнулась с препятствием, с помощью функции объезда препятствий при уборке помещения. Тогда уборочная машина может сканировать препятствие посредством датчика, установленного в уборочной машине, и определить соотношение размера препятствия и размера уборочной машины. Кроме того, уборочная машина может получить площадь контакта между препятствием и полом (то есть площадь основания препятствия) в зависимости от размера уборочной машины, и отметить препятствие на плане помещения согласно площади основания. План помещения является планом очищаемой зоны.
[0086] На шаге 102 неочищенную зону, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне, определяют согласно плану.
[0087] Например, после того, как план, идентифицирующий препятствие, получен, уборочная машина может получить зону, занятую препятствием согласно плану, и затем определить эту зону как неочищенную зону. Если множество препятствий отмечено на плане, зона, занятая каждым из множества препятствий, может быть определена как неочищенная зона. То есть, множество неочищенных зон может быть получено согласно плану. Каждая из неочищенных зон может быть обработана согласно способу, предлагаемому формами осуществления данного изобретения.
[0088] При необходимости, после того, как получен план, идентифицирующий множество препятствий, уборочная машина может последовательно определить, меньше или равна ли площадь основания каждого препятствия заданному пороговому значению площади. Тогда уборочная машина может установить зону, занятую препятствием, которое имеет площадь основания меньше или равную заданному пороговому значению площади, как неочищенную зону, и не отмечать зону, занятую препятствием, которое имеет площадь основания больше заданного порогового значения площади.
[0089] На шаге 103 определяют, может ли быть удалено уборочной машиной препятствие, расположенное в неочищенной зоне.
[0090] Например, после того, как неочищенная зона получена, уборочная машина может определить, может ли препятствие быть удалено, согласно размеру препятствия, находящегося в неочищенной зоне, или типу предмета обстановки, представляющего препятствие. Например, во время инициализации уборочная машина может запомнить заданное пороговое значение. Если уборочная машина определяет, что размер препятствия в любом направлении больше или равен заданному пороговому значению, то это указывает, что препятствие имеет относительно большой размер, и его трудно удалить. Если уборочная машина определяет, что размер препятствия в любом направлении меньше заданного порогового значения, то это указывает, что препятствие имеет относительно небольшой размер и может быть удалено.
[0091] Если уборочная машина получает множество неочищенных зон согласно плану, она может определить, может ли препятствие, расположенное в каждой из неочищенных зон, быть удалено, согласно размеру этого препятствия или типу предмета обстановки, представляющего препятствие.
[0092] На шаге 104, если препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, уборочная машина удаляет препятствие и очищает неочищенную зону.
[0093] Например, если уборочная машина обнаруживает, что препятствие, расположенное в неочищенной зоне, может быть ею удалено, то может быть запущена функция удаления препятствия уборочной машины. При этом уборочная машина может искать оптимальную точку приложения силы к препятствию, двигаться к лучшей точке приложения силы и входить в контакт с лучшей точкой приложения силы. Затем уборочная машина может увеличить толкающее вперед усилие для удаления препятствия в другую зону. После этого уборочная машина может очистить неочищенную зону, чтобы обеспечить полную уборку помещения.
[0094] Практически, после того, как уборка закончена, уборочная машина может также переместить препятствие в первоначальное положение, где препятствие находилось в прежде неочищенной зоне. То есть, уборочная машина может переместить препятствие, которое было перемещено в другую зону, назад на первоначальное место, которое было очищено, чтобы сохранить планировку помещения на основании привычек пользователя в дополнение к полной уборке помещения, что может улучшить впечатление пользователя.
[0095] В частности, после того, как уборка неочищенной зоны закончена, неочищенная зона может быть отмечена как очищенная зона, чтобы избежать перемещения вновь препятствия, расположенного в зоне, избежать нечаянного повреждения препятствия во время процесса дополнительного перемещения и избежать увеличения времени работы уборочной машины.
[0096] В техническом решении, которое предусмотрено в еще одной форме осуществления данного изобретения, если с препятствием сталкиваются во время уборки, зона может быть отмечена как неочищенная зона, и если определяют, что препятствие, расположенное в зоне, может быть удалено, препятствие удаляют и зону очищают. Это может улучшить гибкость при уборке помещения, обеспечить качество уборки и улучшить впечатление пользователя.
[0097] В еще одной форме осуществления изобретения, как показано на фиг. 1b, определение на шаге 103, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной, может быть выполнено посредством шагов 1031-1033.
[0098] На шаге 1031 определяют предмет обстановки, представляющий препятствие, расположенное в неочищенной зоне.
[0099] Например, после того, как уборочная машина получает план с отмеченным множеством препятствий, она может классифицировать множество препятствий согласно площади основания каждого препятствия. Например, если площадь основания препятствия меньше или равна первому заданному пороговому значению, препятствие определяют как первое препятствие; если площадь основания препятствия больше или равна второму заданному пороговому значению, препятствие определяют как второе препятствие. Предполагается, что N первых препятствий и М вторых препятствий получают с помощью вышеупомянутого способа классификации, где и N и М - целые числа, большие или равные 0. Так как первое препятствие имеет относительно малую площадь основания, первое препятствие можно рассматривать как опорную часть предмета обстановки, такую как ножка стола, ножка стула, ножка дивана и т.п. Согласно положениям N первых препятствий может быть получено расстояние между первыми препятствиями, и затем могут быть получены S предметов обстановки, представляющих первые препятствия. Так как второе препятствие имеет относительно большую площадь основания, второе препятствие можно рассматривать как напольный предмет обстановки, такой как кровать, журнальный столик, стул напольного исполнения и т.п. Согласно площадям оснований М вторых препятствий может быть получено М предметов обстановки, представляющих М вторых препятствий.
[00100] На шаге 1032 определяют тип предмета обстановки, и типы предмета обстановки включают передвижные или стационарные предметы обстановки.
[00101] Например, уборочная машина может сначала получить соответствия между предметами обстановки и их типами. Соответствие описывает типы различных предметов обстановки. Тогда, согласно соответствию между предметами обстановки и их типами, определяют тип предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне. Таким образом, это может улучшить удобство и точность при определении типа предмета обстановки. Например, после получения S+M предметов обстановки, расположенных в помещении, уборочная машина может получить типы S+M предметов обстановки согласно соответствию. Предполагается, что уборочная машина определяет суммарно 3 предмета обстановки в помещении согласно площади основания множества препятствий, соответственно кровати, большому платяному шкафу и стулу. Из запроса соответствия между предметами обстановки и их типами, типом кровати и большого платяного шкафа является стационарный предмет обстановки, и типом стула является передвижной предмет обстановки.
[00102] Во время инициализации на экране уборочной машины может быть показан интерфейс для установления соответствия между предметами обстановки и их типами, а также подсказка пользователю посредством звонка или вибрации выполнить установки параметров. Например, пользователь может ввести название первого предмета обстановки в область предмета обстановки интерфейса и затем ввести в эту область тип первого предмета обстановки. Предполагается, что тип предмета обстановки -передвижной предмет обстановки. После того, как уборочная машина принимает введенные данные, она записывает первый предмет обстановки как соответствующий передвижному предмету обстановки. После записи предметов обстановки как принадлежащих к соответствующему типу предметов обстановки, уборочная машина может создать соответствие между предметами обстановки и их типами.
[00103] Альтернативно, уборочная машина и терминал связываются линией инфракрасной связи, системой Bluetooth или беспроводной локальной сетью. Во время инициализации пользователь может установить соответствия между предметами обстановки и их типами на терминале. Терминал записывает соответствия и передает их уборочной машине.
[00104] На шаге 1033, если типом предмета обстановки является передвижной предмет обстановки, проверяют и подтверждают, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной.
[00105] Например, если типом предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, является передвижной предмет обстановки, такой как мусорные корзины, стулья, тазы для стирки или другие предметы домашнего обихода, то это указывает, что препятствие имеет относительно малый объем или вес и может быть перемещено.
[00106] В техническом решении, предусмотренном в еще одной форме осуществления данного изобретения, определяют, может ли препятствие быть удалено, согласно типу предмета обстановки, представляющего препятствие. Это может улучшить удобство и точность определения способности препятствия к перемещению.
[00107] В еще одной форме осуществления изобретения, если типом предмета обстановки является передвижной предмет обстановки, уборочная машина может определять, является ли предмет обстановки заданным предметом обстановки. Если предмет обстановки является заданным предметом обстановки, то проверяют и подтверждают, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной.
[00108] При применении на практике не все передвижные предметы обстановки могут быть перемещены. Перемещение уборочной машиной домашних предметов, таких как мусорные корзины, стулья или тазы для стирки, не будет иметь никаких нежелательных последствий. Но если уборочная машина удаляет вазу или детскую коляску, она, возможно, разобьет вазу или причинит травму ребенку в коляске. Поэтому во время инициализации многочисленные заданные предметы обстановки могут быть записаны в уборочной машине, многочисленные заданные предметы обстановки являются предметами обстановки, которые могут благополучно перемещаться уборочной машиной. Если тип предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, проверяют и подтверждают как передвижной предмет обстановки, уборочная машина может также определить, является ли предмет обстановки каким-либо из многочисленных заданных предметов обстановки. Если предмет обстановки является каким-либо из многочисленных заданных предметов обстановки, это указывает, что предмет обстановки является заданным предметом обстановки, то есть препятствие, соответствующее этому предмету обстановки, может быть перемещено. Если предмет обстановки не является ни одним из многочисленных заданных предметов обстановки, то предмет обстановки не удовлетворяет требованию безопасного перемещения, то есть препятствие, соответствующее этому предмету обстановки, не может быть перемещено.
[00109] В техническом решении, предусмотренном в еще одной форме осуществления данного изобретения, если определяют, что тип предмета обстановки, представляющего препятствие, является передвижным предметом обстановки, далее может быть определено, является ли предмет обстановки заданным предметом обстановки. Если предмет обстановки является заданным предметом обстановки, проверяют и подтверждают, что это препятствие, расположенное в неочищенной зоне, во время уборки может быть удалено, избегая нечаянного повреждения и вреда, вызванного перемещением предмета обстановки, такого как коляска или ваза.
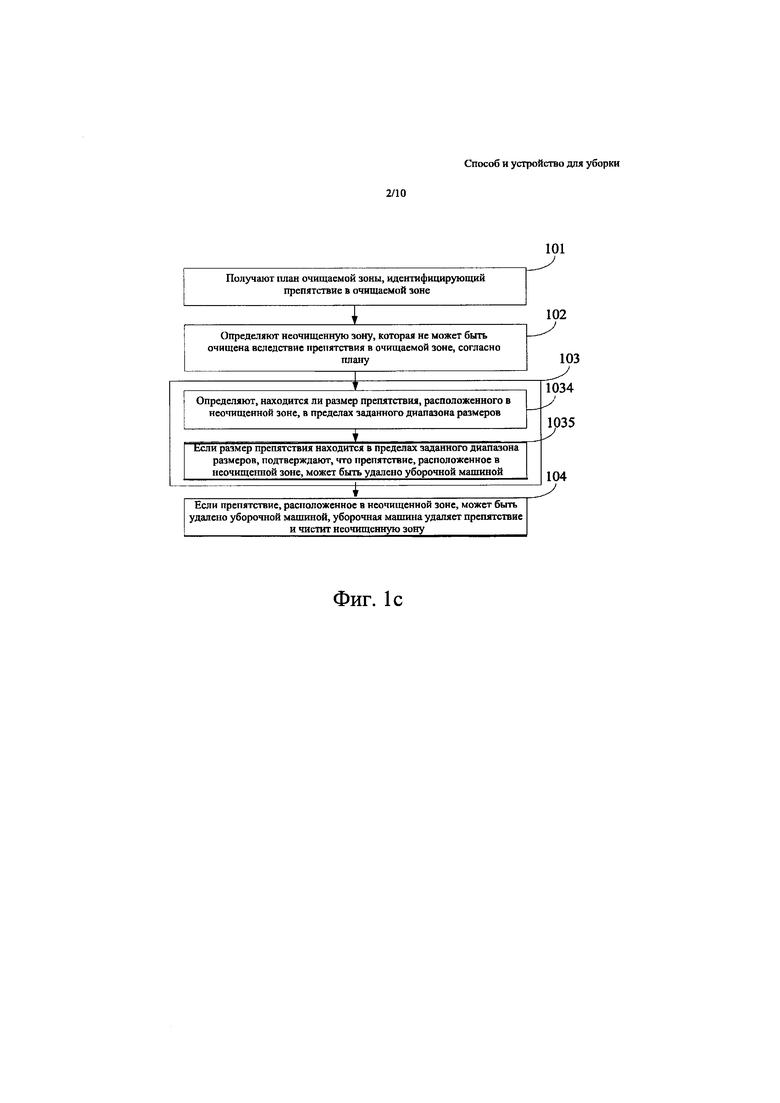
[00110] В еще одной форме осуществления изобретения, как показано на фиг. 1с, определение на шаге 103, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной, может выполняться посредством шагов 1034-1035.
[00111] На шаге 1034 определяют, находится ли размер препятствия, расположенного в неочищенной зоне, в пределах заданного диапазона размеров.
[00112] На шаге 1035, если размер препятствия находится в пределах заданного диапазона размеров, проверяют и подтверждают, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной.
[00113] Например, уборочная машина может также определять, может ли препятствие быть удалено, согласно размеру препятствия. В частности, во время инициализации пользователь может установить заданный диапазон размеров в уборочной машине. Заданный диапазон размеров определяет максимальный размер и минимальный размер устранимого препятствия. Если размер препятствия является слишком большим, то для уборочной машины трудно переместить препятствие, и может быть подтверждено, что препятствие нельзя удалять. Если размер препятствия слишком мал, то уборочная машина может с трудом сохранять равновесие во время перемещения и стремиться к разрушению препятствия, и поэтому также может быть подтверждено, что препятствие нельзя удалять.
[00114] В частности, уборочная машина может сканировать препятствие, расположенное в неочищенной зоне, датчиком, установленным на уборочной машине, и определять соотношение между размерами препятствия и уборочной машины. Далее, уборочная машина может получать размер препятствия в любом направлении в зависимости от размера уборочной машины. Тогда уборочная машина может определять, находится ли размер препятствия в любом направлении в пределах заданного диапазона размеров. То есть, находится ли каждый размер препятствия в любом направлении в пределах заданного диапазона размеров. Если каждый размер препятствия в любом направлении находится в пределах заданного диапазона размеров, это указывает, что препятствие может быть удалено уборочной машиной; иначе, это указывает, что препятствие нельзя удалять.
[00115] В техническом решении, предусмотренном в еще одной форме осуществления данного изобретения, определяют, может ли препятствие быть удалено, согласно размеру препятствия. Это может улучшить удобство и точность определения способности препятствия к перемещению.
[00116] В еще одной форме осуществления изобретения, если размер препятствия находится в пределах заданного диапазона размеров, уборочная машина может получать также толкающее усилие, необходимое для удаления препятствия, и определять согласно толкающему усилию, может ли препятствие быть удалено уборочной машиной.
[00117] При практическом применении, хотя препятствие может иметь размер, находящийся в пределах заданного диапазона размеров, препятствие может иметь большую силу трения с контактной частью пола. То есть толкающее усилие, необходимое для перемещения препятствия, является большим, и трудно переместить препятствие или сохранять равновесие при перемещении препятствия. Поэтому во время инициализации пользователь может записать заданное пороговое значение толкающего усилия в уборочную машину; заданное пороговое значение толкающего усилия определяет верхний предел толкающего усилия уборочной машины для перемещения препятствия. Если определяют, что размер препятствия находится в пределах заданного диапазона размеров, уборочная машина может получить толкающее усилие, необходимое для удаления препятствия. Если определяют, что толкающее усилие меньше или равно заданному пороговому значению толкающего усилия, то проверяют и подтверждают, что препятствие может быть удалено уборочной машиной. Если определяют, что толкающее усилие больше заданного порогового значения толкающего усилия, то проверяют и подтверждают, что препятствие нельзя удалять.
[00118] В частности, если определяют, что размер препятствия находится в пределах заданного диапазона размеров, уборочная машина может двигаться к препятствию, настраивать толкающее усилие на минимальное значение после вхождения в контакт с оптимальной точкой приложения силы к препятствию. Тогда уборочная машина может постепенно увеличивать толкающее усилие, чтобы определять, перемещается ли препятствие. Если препятствие перемещается, когда уборочная машина настраивает толкающее усилие на первое толкающее усилие, то это указывает, что толкающее усилие, необходимое для удаления препятствия, является первым толкающим усилием. Если первое толкающее усилие больше заданного порогового значения толкающего усилия, то это указывает, что препятствие нельзя удалять; если первое толкающее усилие меньше или равно заданному пороговому значению толкающего усилия, то это указывает, что препятствие может быть удалено уборочной машиной.
[00119] Альтернативно, во время инициализации соответствие между предметами обстановки и толкающими усилиями может быть записана в уборочной машине. Соответствие описывает различные толкающие усилия, необходимые для перемещения различных предметов обстановки. Если уборочная машина решает, что размер препятствия находится в пределах заданного диапазона размеров, уборочная машина может получить предмет обстановки, представляющий препятствие. Тогда уборочная машина может запросить соответствие между предметами обстановки и толкающими усилиями, чтобы получить толкающее усилие, необходимое для перемещения предмета обстановки. Если толкающее усилие больше заданного порогового значения толкающего усилия, то это указывает, что препятствие, соответствующее предмету обстановки, нельзя удалять; если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия, это указывает, что препятствие, соответствующее предмету обстановки, может быть удалено уборочной машиной.
[00120] В техническом решении, предусмотренном в еще одной форме осуществления данного изобретения, определяют, может ли препятствие быть удалено, согласно размеру препятствия и величине толкающего усилия, необходимого для перемещения препятствия. Это может улучшить удобство и точность определения способности препятствия к перемещению.
[00121] При практическом применении способ может выполняться также терминалом, который может быть мобильным телефоном, планшетным компьютером, интеллектуальными часами и другими устройствами, способными к осуществлению связи с уборочной машиной, которые не ограничены при осуществлении данного изобретения. Терминал и уборочная машина могут быть связаны посредством инфракрасной линии связи, системы Bluetooth или сеть радиосвязи.
[00122] После того, как уборочная машина получает план помещения, она может передать план терминалу. Терминал может определить в очищаемой зоне неочищенную зону, которая не может быть очищена вследствие расположения препятствия согласно плану, и затем определить, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной. Если препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, терминал может подать команду на первую операцию и послать ее уборочной машине. Команда на первую операцию заставляет уборочную машину удалить препятствие и очистить неочищенную зону, занятую препятствием.
[00123] Альтернативно, после приема плана с множеством отмеченных препятствий, посланного уборочной машиной, терминал отмечает все зоны, которые не могут быть очищены вследствие занятия множеством препятствий, как неочищенные зоны. То есть множество неочищенных зон может быть определено согласно плану. Тогда терминал последовательно определяет, может ли быть удалено уборочной машиной препятствие, расположенное в каждой неочищенной зоне, и формирует команду на вторую операцию согласно результату определения, и затем посылает команду на вторую операцию уборочной машине. Команда на вторую операцию заставляет уборочную машину последовательно удалять препятствия, которые определены как устранимые, и очищать неочищенные зоны, занятые препятствиями.
[00124] В частности, терминал может определять, может ли препятствие быть удалено уборочной машиной, согласно типу предмета обстановки препятствия, находящегося в каждой неочищенной зоне, или определять, может ли препятствие быть удалено уборочной машиной, согласно размеру препятствия, находящегося в каждой неочищенной зоне, что не ограничено в этой форме осуществления данного изобретения.
[00125] При практическом применении уборочная машина может также определять, может ли препятствие, с которым она сталкивается, быть удалено уборочной машиной при уборке очищаемой зоны, перемещать препятствие в другую зону, если определено, что препятствие может быть удалено уборочной машиной, очищать зону, первоначально занятую препятствием, и затем перемещать препятствие в первоначальное положение. В частности, если уборочная машина чистит очищаемую зону и сталкивается с первым препятствием, уборочная машина может сначала получить предмет обстановки, представляющий первое препятствие, затем определить тип этого предмета, и далее определить, может ли препятствие быть удалено уборочной машиной, согласно типу предмета обстановки. Если препятствие может быть удалено уборочной машиной, уборочная машина может переместить препятствие в другую зону, очистить зону, первоначально занятую препятствием, и затем переместить препятствие в первоначальное положение. Если препятствие нельзя удалить, уборочная машина может объехать препятствие и продолжить чистить другие зоны.
[00126] Реализация будет описана подробно со ссылкой на некоторые формы осуществления изобретения.
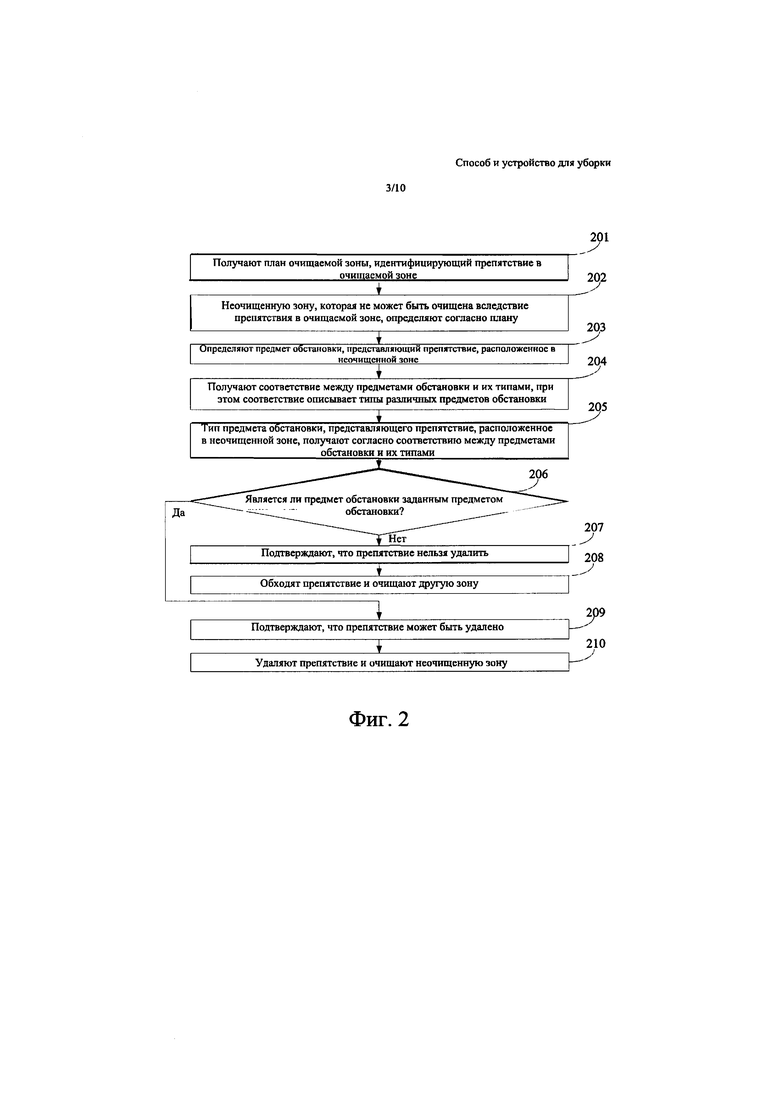
[00127] На фиг. 2 показана блок-схема, иллюстрирующая способ уборки согласно примеру осуществления, который выполняется уборочной машиной. Как показано на фиг. 2, способ включает следующие шаги 201-202.
[00128] На шаге 201 получают план очищаемой зоны, идентифицирующий препятствие в очищаемой зоне, и выполняют шаг 202.
[00129] На шаге 202 неочищенную зону, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне, определяют согласно плану и выполняют шаг 203.
[00130] На шаге 203 определяют предмет обстановки, представляющий препятствие, расположенное в неочищенной зоне, и выполняют шаг 204.
[00131] На шаге 204 получают соответствие между предметами обстановки и их типами, и эта соответствие описывает типы различных предметов обстановки, и выполняют шаг 205.
[00132] На шаге 205 тип предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, получают согласно соответствию между предметами обстановки и их типами, и выполняют шаг 206.
[00133] На шаге 206, если тип предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, является передвижным предметом обстановки, определяют, является ли предмет обстановки заданным предметом обстановки. Если предмет обстановки не является заданным предметом обстановки, выполняют шаг 207, и если предмет обстановки является заданным предметом обстановки, выполняют шаг 209.
[00134] На шаге 207 проверяют и подтверждают, что препятствие, расположенное в неочищенной зоне, нельзя удалять, и выполняют шаг 208.
[00135] На шаге 208 объезжают препятствие, и очищают другую зону. Процесс завершают.
[00136] На шаге 209 проверяют и подтверждают, что препятствие, расположенное в неочищенной зоне, может быть удалено, и выполняют шаг 210.
[00137] На шаге 210 удаляют препятствие и очищают неочищенную зону.
[00138] В еще одной форме осуществления данного изобретения предлагается способ уборки. Если с препятствием сталкиваются во время уборки, зона может быть отмечена как неочищенная зона, и если определяют, что препятствие, расположенное в зоне, может быть удалено, удаляют препятствие и очищают зону. Это может улучшить гибкость при уборке помещения, гарантировать качество уборки и улучшить впечатление пользователя.
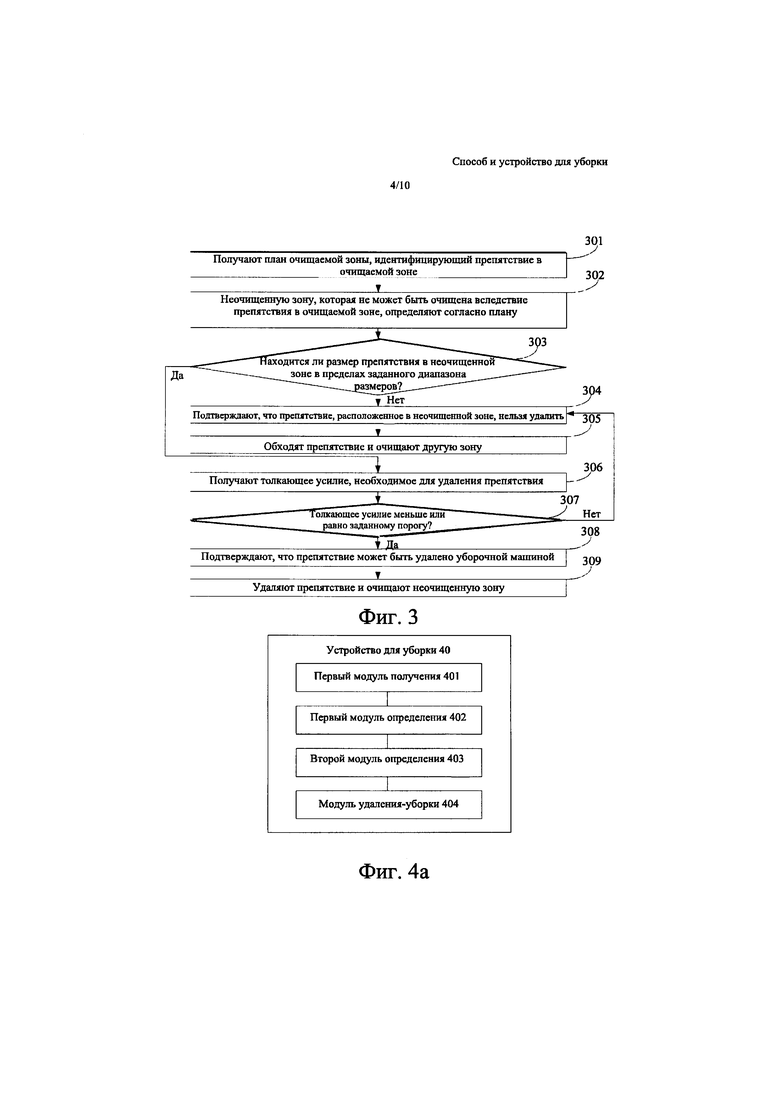
[00139] На фиг. 3 показана блок-схема, иллюстрирующая способ уборки согласно примеру осуществления, который выполняется уборочной машиной. Как показано на фиг. 3, способ включает следующие шаги 301-309.
[00140] На шаге 301 получают план очищаемой зоны, идентифицирующий препятствие в очищаемой зоне, и выполняют шаг 302.
[00141] На шаге 302 неочищенную зону, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне, определяют согласно плану и выполняют шаг 303.
[00142] На шаге 303 определяют, находится ли размер препятствия, расположенного в неочищенной зоне, в пределах заданного диапазона размеров. Если размер этого препятствия не находится в пределах заданного диапазона размеров, выполняют шаг 304. Если размер этого препятствия находится в пределах заданного диапазона размеров, выполняют шаг 306.
[00143] На шаге 304, проверяют и подтверждают, что препятствие, расположенное в неочищенной зоне, нельзя удалять, и выполняют шаг 305.
[00144] На шаге 305 объезжают препятствие и очищают другую зону. Процесс заканчивают.
[00145] На шаге 306 получают толкающее усилие, необходимое для удаления препятствия, и выполняют шаг 307.
[00146] На шаге 307 определяют, является ли толкающее усилие меньшим или равным заданному порогу толкающего усилия. Если толкающее усилие больше заданного порога толкающего усилия, выполняют шаг 304. Если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия, выполняют шаг 308.
[00147] На шаге 308 проверяют и подтверждают, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, и выполняют шаг 309.
[00148] На шаге 309 удаляют препятствие и очищают неочищенную зону.
[00149] В еще одной форме осуществления данного изобретения предлагается способ уборки. Если во время уборки сталкиваются с препятствием, зона может быть отмечена как неочищенная зона, и если определяют, что препятствие, расположенное в зоне, может быть удалено, удаляют препятствие и очищают зону. Это может улучшить гибкость при уборке помещения, гарантировать качество уборки и улучшить впечатление пользователя.
[00150] Ниже приводятся формы осуществления устройства согласно данному изобретению, и они могут использоваться для выполнения форм осуществления способа данного изобретения.
[00151] На фиг. 4а показана блок-схема, иллюстрирующая устройство 40 уборки согласно примеру осуществления изобретения. Устройство 40 может быть реализовано как часть или все электронное устройство программным обеспечением, аппаратными средствами, или комбинацией их обоих. Как показано на фиг. 40а, устройство 40 уборки содержит первый модуль 401 получения, первый модуль 402 определения, второй модуль 403 определения и модуль 404 удаления-уборки.
[00152] Первый модуль 401 получения выполнен с возможностью получения плана очищаемой зоны, идентифицирующего препятствие в очищаемой зоне.
[00153] Первый модуль 402 определения выполнен с возможностью определения неочищенной зоны, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне согласно плану.
[00154] Второй модуль 403 определения выполнен с возможностью определения, может ли быть удалено уборочной машиной препятствие, расположенное в неочищенной зоне.
[00155] Модуль 404 удаления-уборки выполнен с возможностью удаления препятствия и уборки неочищенной зоны, если препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной.
[00156] В еще одной форме осуществления изобретения, как показано на фиг. 4b, второй модуль 404 определения содержит: первый субмодуль 4031 определения, второй субмодуль 4032 определения и первый субмодуль 4033 подтверждения.
[00157] Первый субмодуль 4031 определения выполнен с возможностью определения предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне.
[00158] Второй субмодуль 4032 определения выполнен с возможностью определения типа предмета обстановки; типы предмета обстановки включают передвижной или стационарный предмет обстановки.
[00159] Первый субмодуль 4033 подтверждения выполнен с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если типом предмета обстановки является передвижной предмет обстановки.
[00160] В еще одной форме осуществления изобретения, как показано на фиг. 4с, первый субмодуль 4033 подтверждения содержит: блок 4033а определения и первый блок 4033b подтверждения.
[00161] Блок 4033а определения выполнен с возможностью определения, является ли предмет обстановки заданным предметом обстановки, если типом предмета обстановки является передвижной предмет обстановки.
[00162] Первый блок 4033b подтверждения выполнен с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если предмет обстановки является заданным предметом обстановки.
[00163] В еще одной форме осуществления изобретения, как показано на фиг. 4d, второй субмодуль 4032 определения содержит: первый блок 4032а получения и второй блок 4032b получения.
[00164] Первый блок получения 4032а выполнен с возможностью получения соответствия между предметами обстановки и их типами; соответствие описывает типы различных предметов обстановки.
[00165] Второй блок получения 4032b выполнен с возможностью получения типа предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, согласно соответствию между предметами обстановки и их типами.
[00166] В еще одной форме осуществления изобретения, как показано на фиг. 4е, второй модуль 403 определения содержит: третий субмодуль 4034 определения и второй субмодуль 4035 подтверждения.
[00167] Третий субмодуль 4034 определения выполнен с возможностью определения, находится ли размер препятствия, расположенного в неочищенной зоне, в пределах заданного диапазона размеров.
[00168] Второй субмодуль подтверждения 4035 выполнен с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если размер этого препятствия находится в пределах заданного диапазона размеров.
[00169] В еще одной форме осуществления изобретения, как показано на фиг. 4f, второй субмодуль 4035 подтверждения содержит: третий блок 4035а получения и второй блок 4035b подтверждения.
[00170] Третий блок 4035а получения выполнен с возможностью получения толкающего усилия, необходимого для удаления препятствия, если размер препятствия, расположенного в неочищенной зоне, находится в пределах заданного диапазона размеров.
[00171] Второй блок 4035b подтверждения выполнен с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия.
[00172] В еще одной форме осуществления изобретения, как показано на фиг. 4g, устройство 40 уборки может дополнительно содержать: модуль 405 восстановления. Модуль 405 восстановления выполнен с возможностью перемещения препятствия в первоначальное положение в прежде неочищенной зоне после того, как уборка закончена.
[00173] Формы осуществления данного изобретения предусматривают устройство уборки. Если во время уборки сталкиваются с препятствием, устройство может отмечать зону как неочищенную зону, и если определяет, что препятствие, расположенное в зоне, может быть удалено, удаляет препятствие и очищает зону. Это может улучшить гибкость при уборке помещения, гарантировать качество уборки и улучшить впечатление пользователя.
[00174] Форма осуществления данного изобретения предусматривает устройство уборки, содержащее:
[00175] процессор; и
[00176] запоминающее устройство для хранения команд, выполняемых процессором;
[00177] причем процессор выполнен с возможностью:
[00178] определения неочищенной зоны, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне, согласно плану;
[00179] определения, может ли быть удалено препятствие, расположенное в неочищенной зоне; и
[00180] удаления препятствия и уборки неочищенной зоны, если препятствие, расположенное в неочищенной зоне, может быть удалено.
[00181] В одной форме осуществления изобретения процессор дополнительно выполнен с возможностью: определения предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне; определения типа предмета обстановки; типы предмета обстановки включают передвижные или стационарные предметы обстановки; и проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено, если типом предмета обстановки является передвижной предмет обстановки.
[00182] В еще одной форме осуществления изобретения процессор дополнительно выполнен с возможностью: определения, является ли предмет обстановки заданным предметом обстановки, если типом предмета обстановки является передвижной предмет обстановки; и проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено, если предмет обстановки является заданным предметом обстановки.
[00183] В еще одной форме осуществления изобретения процессор дополнительно выполнен с возможностью выполнения: получения соответствия между предметами обстановки и их типами, причем соответствие описывает типы различных предметов обстановки; и получения типа предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, согласно соответствию между предметами обстановки и их типами.
[00184] В еще одной форме осуществления изобретения процессор дополнительно выполнен с возможностью выполнения: определения, находится ли размер препятствия, расположенного в неочищенной зоне, в пределах заданного диапазона размеров; и проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено, если размер этого препятствия находится в пределах заданного диапазона размеров.
[00185] В еще одной форме осуществления изобретения процессор дополнительно выполнен с возможностью: получения толкающего усилия, необходимого для удаления препятствия, если размер препятствия, расположенного в неочищенной зоне, находится в пределах заданного диапазона размеров; и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено, если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия.
[00186] В еще одной форме осуществления изобретения процессор дополнительно выполнен с возможностью: перемещения препятствия после завершения уборки в первоначальное положение в прежде неочищенной зоне.
[00187] Формы осуществления данного изобретения предусматривают устройство уборки. Если во время уборки сталкиваются с препятствием, устройство может отмечать зону как неочищенную зону, и если определяют, что препятствие, расположенное в зоне, может быть удалено, удаляет препятствие и очищает зону. Это может улучшить гибкость при уборке помещения, гарантировать качество уборки и улучшить впечатление пользователя.
[00188] Что касается устройств в вышеописанных формах осуществления, то конкретный способ, которым каждый модуль выполняет работу, был описан подробно в формах осуществления, связанных со способом, и не будет здесь подробно рассматриваться.
[00189] На фиг. 5 показана блок-схема, иллюстрирующая устройство 50 уборки согласно примеру осуществления изобретения. Устройство 50 применяется в оконечном устройстве. Например, устройство 50 может быть мобильным телефоном, устройством передачи сообщений, планшетным устройством, интеллектуальным домашним устройством, и т.п.
[00190] Устройство 50 может содержать один или несколько из следующих компонентов: компонент 502 обработки, запоминающее устройство 504, компонент 506 питания, мультимедийный компонент 508, аудио компонент 510, интерфейс 512 ввода-вывода (Input/Output, I/O), компонент 514 датчиков и компонент 516 связи.
[00191] Компонент 502 обработки обычно управляет всеми операциями устройства 50, такими как операции, связанные с отображением данных, телефонными разговорами, передачей данных, операциями камеры и операциями записи. Компонент 502 обработки может включать один или несколько процессоров 520, чтобы выполнить команды для выполнения всех или части шагов в вышеописанных способах. Кроме того, компонент 502 обработки может содержать один или несколько модулей, которые обеспечивают взаимодействие между компонентом 502 обработки и другими компонентами. Например, компонент 502 обработки может содержать мультимедийный модуль, чтобы облегчать взаимодействие между мультимедийным компонентом 508 и компонентом 502 обработки.
[00192] Запоминающее устройство 504 выполнено с возможностью хранения различные видов данных, необходимых для поддержания работы устройства 50. Примеры таких данных включают команды для некоторых приложений или способов, работающих в устройстве 50, контактную информацию, данные телефонной книги, сообщения, изображения, видео и т.п.Запоминающее устройство 504 может быть реализовано с использованием любого вида энергозависимых или энергонезависимых запоминающих устройств, или их комбинации, таких как статическое запоминающее устройство с произвольной выборкой (Static Random Access Memory, SRAM), электрически-стираемое программируемое постоянное запоминающее устройство (Electrically Erasable Programmable Read-Only Memory, EEPROM), стираемое программируемое постоянное запоминающее устройство (Erasable Programmable Read-Only Memory, EPROM), программируемое постоянное запоминающее устройство (Programmable Read-Only Memory, PROM), постоянное запоминающее устройство (Read-Only Memory, ROM), магнитная память, флэш-память, магнитный или оптический диск.
[00193] Компонент 506 питания подает питание к различным компонентам устройства 50. Компонент 506 питания может содержать систему управления питанием, один или несколько источников питания и другие компоненты, связанные с генерацией, управлением и распределением энергии в устройстве 50.
[00194] Мультимедийный компонент 508 включает экран, обеспечивающий выходной интерфейс между устройством 50 и пользователем. В некоторых формах осуществления экран может содержать дисплей на жидких кристаллах (Liquid Crystal Display, LCD) и сенсорную панель (Touch Panel, TP). Если экран содержит сенсорную панель, он может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель содержит один или несколько датчиков касания, чтобы воспринимать касания, скольжения и жесты на сенсорной панели. Датчики касания могут не только воспринимать порог действия касания или скольжения, но также и воспринимать период времени и давление, связанные с механизмом действия касания или скольжения. В некоторых формах осуществления мультимедийный компонент 508 содержит фронтальную камеру и/или заднюю камеру. Фронтальная камера и/или задняя камера может принимать внешние мультимедийные данные, в то время как устройство 50 находится в рабочем режиме, таком как режим фотографирования или телевизионный режим. Каждая из фронтальной камеры и задней камеры может иметь фиксированную систему оптического объектива или иметь возможности фокусировки и оптического изменения масштаба изображения.
[00195] Аудиокомпонент 510 сконфигурирован для вывода и/или ввода звуковых сигналов. Например, аудиокомпонент 510 включает микрофон (MIC), сконфигурированный для приема внешнего звукового сигнала, если устройство 50 находится в рабочем режиме, таком как режим разговора, режим записи и режим распознавания речи. Принимаемый звуковой сигнал далее может записываться в запоминающее устройство 504 или передаваться через компонент 516 связи. В некоторых формах осуществления аудиокомпонент 510 дополнительно содержит громкоговоритель для вывода звуковых сигналов.
[00196] Интерфейс 512 ввода-вывода обеспечивает интерфейс между компонентом 502 обработки и модулями периферийного интерфейса, таких как клавиатура, сенсорный круг Click Wheel, кнопки и т.п. Кнопки могут включать, в том числе кнопку начального положения, кнопку громкости, кнопку пуска и кнопку блокировки.
[00197] Компонент 514 датчиков содержит один или несколько датчиков, чтобы предоставлять оценки состояния различных аспектов устройства 50. Например, компонент 514 датчиков может обнаруживать открытое/закрытое состояние устройства 50, относительное позиционирование компонентов, например, дисплея и клавиатуры устройства 50, изменение в позиции устройства 50 или компонента устройства 50, наличие или отсутствие контакта пользователя с устройством 50, ориентацию или ускорение/замедление устройства 50, и изменение температуры устройства 50. Компонент 514 датчиков может содержать датчик присутствия, сконфигурированный для обнаружения присутствия близлежащих объектов без какого-либо физического контакта, может содержать также светочувствительный элемент, такой как формирователь изображения на комплементарной структуре металл-оксид-полупроводник (Complementary Metal-Oxide-Semiconductor, CMOS) или приборе с зарядовой связью (Charge Coupled Device, CCD) для использования в применениях формирования изображений. В некоторых формах осуществления компонент 514 датчиков может содержать также датчик ускорения, гироскопический датчик, магнитный датчик, датчик давления или температурный датчик.
[00198] Компонент 516 связи выполнен с возможностью обеспечения связи, проводной или беспроводной, между устройством 50 и другими устройствами. Устройство 50 может получать доступ к беспроводной сети на основании стандарта связи, такого как WiFi, системы подвижной связи второго поколения (2G) или третьего поколения (3G), или их комбинации. В одном примере осуществления компонент 516 связи принимает широковещательный сигнал или информацию, связанную с широковещательной передачей, от внешней широковещательной системы управления через широковещательный канал. В одном примере осуществления компонент 516 связи дополнительно содержит модуль радиосвязи ближнего действия (NFC), чтобы обеспечивать ближнюю связь. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии Ассоциации по передаче данных в инфракрасном диапазоне (Infrared Data Association, IrDA), сверхширокополосной технологии (Ultra-Wideband, UWB), технологии Bluetooth (ВТ) и других технологий.
[00199] В примерах осуществления устройство 50 может быть реализовано одной или несколькими специализированными интегральными схемами (Application Specific Integrated Circuits, ASIC), процессорами цифровой обработки сигналов (Digital Signal Processors, DSP), устройствами для цифровой обработки сигналов (Digital Signal Processing Devices, DSPD), программируемыми логическими устройствами (Programmable Logic Devices, PLD), программируемыми пользователем вентильными матрицами (Field Programmable Gate Arrays, FPGA), контроллерами, микроконтроллерами, микропроцессорами или другими электронными компонентами для выполнения вышеописанных способов.
[00200] В примерах осуществления предусматривается также машиночитаемый носитель данных, содержащий команды, такие как включенные в запоминающее устройство 504, выполняемые процессором 520 в устройстве 50, чтобы выполнять вышеописанные способы. Например, машиночитаемый носитель данных может быть постоянным запоминающим устройством (ROM), запоминающим устройством с произвольной выборкой (Random Access Memory, RAM), запоминающим устройством на компакт диске (Compact Disk-Read Only Memory, CD-ROM), магнитной лентой, гибким диском, оптическим запоминающим устройством и т.п.
[00201] Форма осуществления данного изобретения предусматривает машиночитаемый носитель данных, имеющий хранящиеся на нем команды, которые при выполнении процессором устройства 50 заставляют устройство 50, чтобы осуществлять вышеописанный способ уборки. Способ заключается в том, что:
[00202] получают план очищаемой зоны, идентифицирующий препятствие в очищаемой зоне;
[00203] определяют неочищенную зону, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне, согласно плану;
[00204] определяют, может ли быть удалено препятствие, расположенное в неочищенной зоне; и
[00205] удаляют препятствия и очищают неочищенную зону, если препятствие, расположенное в неочищенной зоне, может быть удалено.
[00206] В одной форме осуществления изобретения, определение, может ли препятствие, расположенное в неочищенной зоне, быть удалено, включает: определение предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне; определение типа предмета обстановки, причем типы включают передвижные или стационарные предметы обстановки; и подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено, если типом предмета обстановки является передвижной предмет обстановки.
[00207] В еще одной форме осуществления изобретения подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено, если типом предмета обстановки является передвижной предмет обстановки, включает: определение, является ли предмет обстановки заданным предметом обстановки, если типом предмета обстановки является передвижной предмет обстановки; и подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено, если предмет обстановки является заданным предметом обстановки.
[00208] В еще одной форме осуществления изобретения, определение типа предмета обстановки включает: получение соответствия между предметами обстановки и их типами, причем соответствие описывает типы различных предметов обстановки; и получение типа предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, согласно соответствию между предметами обстановки и их типами.
[00209] В еще одной форме осуществления изобретения определение, может ли препятствие, расположенное в неочищенной зоне, быть удалено, включает: определение, находится ли размер препятствия, расположенного в неочищенной зоне, в пределах заданного диапазона размеров; и подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено, если размер этого препятствия находится в пределах заданного диапазона размеров.
[00210] В еще одной форме осуществления изобретения подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено, если размер этого препятствия находится в пределах заданного диапазона размеров, включает: получение толкающего усилия, необходимого для удаления препятствия, если размер препятствия, расположенного в неочищенной зоне, находится в пределах заданного диапазона размеров; и подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено, если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия.
[00211] В еще одной форме осуществления изобретения способ уборки дополнительно включает: перемещение препятствия после завершения уборки в первоначальное положение в ранее неочищенной зоне.
[00212] Другие формы осуществления данного изобретения будут очевидны специалистам из рассмотрения описания и применения на практике раскрытого здесь изобретения. Данная заявка предназначена для того, чтобы охватить любые изменения, использования или адаптации изобретения, следующие его общим принципам и включающие такие отклонения от данного изобретения, которые находятся в пределах известной или общепринятой практики в данной области техники. Предполагается, что описание и примеры приводятся только в качестве примера, с истинным объемом и сущностью изобретения, указываемыми в соответствии с нижеследующей формулой изобретения.
[00213] Должно быть очевидно, что данное изобретение не ограничено точной конструкцией, которая была описана выше и проиллюстрирована на прилагаемых чертежах, и что различные модификации и изменения могут быть сделаны без отступления от его объема. Предполагается, что объем данного изобретения ограничен только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕДВИЖНАЯ ПОЛОУБОРОЧНАЯ МАШИНА С ДЕРЖАТЕЛЕМ ИНВЕНТАРЯ | 2011 |
|
RU2569777C2 |
| ПЕРЕДВИЖНАЯ МАВИНА ДЛЯ УБОРКИ ПОЛА | 2010 |
|
RU2537161C1 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| СПОСОБ И АГРЕГАТ ДЛЯ УБОРКИ УРОЖАЯ | 2000 |
|
RU2249939C2 |
| Автоматическое уборочное оборудование | 2021 |
|
RU2820188C1 |
| Автоматическое уборочное оборудование | 2024 |
|
RU2841299C2 |
| СЕЛЬХОЗМАШИНА С ФУНКЦИЕЙ ЭКСТРЕННОЙ ОСТАНОВКИ | 2009 |
|
RU2492619C2 |
| УБОРОЧНЫЙ КОМПЛЕКС | 2012 |
|
RU2569566C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ПЕРЕВАЛКИ | 2015 |
|
RU2683040C2 |
| Способ и устройство тревожной сигнализации | 2015 |
|
RU2629469C1 |
Данное изобретение относится к способу и устройству для уборки. Способ включает: получение плана очищаемой зоны, идентифицирующего препятствие в очищаемой зоне; определение неочищенной зоны, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне согласно плану; определение, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной; и удаление уборочной машиной препятствия и уборку уборочной машиной неочищенной зоны, если препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной. В данном техническом решении, встречая препятствие во время уборки, уборочная машина может отмечать зону как неочищенную зону, и если определено, что препятствие, расположенное в этой зоне, может быть удалено, уборочная машина удаляет препятствие и очищает зону. Это может улучшить гибкость при уборке помещения, гарантировать качество уборки и улучшить впечатление пользователя от использования уборочной машины. 4 н. и 12 з.п. ф-лы, 13 ил.
1. Способ уборки, применяемый в уборочной машине, в котором:
получают план очищаемой зоны, идентифицирующий препятствие в очищаемой зоне;
определяют неочищенную зону, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне согласно плану;
определяют, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной; и
удаляют уборочной машиной препятствие и очищают уборочной машиной неочищенную зону, если препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной.
2. Способ по п. 1, в котором определение, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной, включает:
определение предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне;
определение типа предмета обстановки, причем типы включают передвижные предметы обстановки или стационарные предметы обстановки; и
подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если типом предмета обстановки является передвижной предмет обстановки.
3. Способ по п. 2, в котором подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если типом предмета обстановки является передвижной предмет обстановки, включает:
определение, является ли предмет обстановки заданным предметом обстановки, если типом предмета обстановки является передвижной предмет обстановки; и
подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если предмет обстановки является заданным предметом обстановки.
4. Способ по п. 2, в котором определение типа предмета обстановки включает:
получение соответствия между предметами обстановки и их типами, причем соответствие описывает типы различных предметов обстановки; и
получение типа предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, согласно соответствию между предметами обстановки и их типами.
5. Способ по п. 1, в котором определение, может ли препятствие, расположенное в неочищенной зоне, быть удалено уборочной машиной, включает:
определение, находится ли размер препятствия, расположенного в неочищенной зоне, в пределах заданного диапазона размеров; и
подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если размер этого препятствия находится в пределах заданного диапазона размеров.
6. Способ по п. 5, в котором подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если размер этого препятствия находится в пределах заданного диапазона размеров, включает:
получение толкающего усилия, необходимого для удаления препятствия, если размер препятствия, расположенного в неочищенной зоне, находится в пределах заданного диапазона размеров; и
подтверждение, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия.
7. Способ по п. 1, дополнительно включающий:
перемещение препятствия в первоначальное положение в ранее неочищенной зоне после завершения уборки.
8. Устройство для уборки, содержащее:
первый модуль получения, выполненный с возможностью получения плана очищаемой зоны, идентифицирующего препятствия в очищаемой зоне;
первый модуль определения, выполненный с возможностью определения неочищенной зоны, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне согласно плану;
второй модуль определения, выполненный с возможностью определения, может ли быть удалено препятствие, расположенное в неочищенной зоне; и
модуль удаления-уборки, выполненный с возможностью удаления препятствия и уборки неочищенной зоны, если препятствие, расположенное в неочищенной зоне, может быть удалено.
9. Устройство по п. 8, в котором второй модуль определения содержит:
первый субмодуль определения, выполненный с возможностью определения предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне;
второй субмодуль определения, выполненный с возможностью определения типа предмета обстановки, причем типы включают передвижные предметы обстановки или стационарные предметы обстановки; и
первый субмодуль подтверждения, выполненный с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено уборочной машиной, если типом предмета обстановки является передвижной предмет обстановки.
10. Устройство по п. 9, в котором первый субмодуль подтверждения содержит:
блок определения, выполненный с возможностью определения, является ли предмет обстановки заданным предметом обстановки, если типом предмета обстановки является передвижной предмет обстановки; и
первый блок подтверждения, выполненный с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено, если предмет обстановки является заданным предметом обстановки.
11. Устройство по п. 9, в котором второй субмодуль определения содержит:
первый блок получения, выполненный с возможностью получения соответствия между предметами обстановки и их типами, причем соответствие описывает типы различных предметов обстановки; и
второй блок получения, выполненный с возможностью получения типа предмета обстановки, представляющего препятствие, расположенное в неочищенной зоне, согласно соответствию между предметами обстановки и их типами.
12. Устройство по п. 8, в котором второй модуль определения содержит:
третий субмодуль определения, выполненный с возможностью определения, находится ли размер препятствия, расположенного в неочищенной зоне, в пределах заданного диапазона размеров; и
второй субмодуль подтверждения, выполненный с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено, если размер этого препятствия находится в пределах заданного диапазона размеров.
13. Устройство по п. 12, в котором второй субмодуль подтверждения содержит:
третий блок получения, выполненный с возможностью получения толкающего усилия, необходимого для перемещения препятствия, если размер препятствия, расположенного в неочищенной зоне, находится в пределах заданного диапазона размеров; и
второй блок подтверждения, выполненный с возможностью проверки и подтверждения, что препятствие, расположенное в неочищенной зоне, может быть удалено, если толкающее усилие меньше или равно заданному пороговому значению толкающего усилия.
14. Устройство по п. 8, дополнительно содержащее:
модуль восстановления, выполненный с возможностью перемещения препятствия в первоначальное положение в ранее неочищенной зоне после завершения уборки.
15. Устройство для уборки, содержащее:
процессор; и
запоминающее устройство для хранения команд, выполняемых процессором;
причем процессор выполнен с возможностью:
получения плана очищаемой зоны, идентифицирующего препятствие в очищаемой зоне;
определения неочищенной зоны, которая не может быть очищена вследствие расположения препятствия в очищаемой зоне согласно плану;
определения, может ли быть удалено препятствие, расположенное в неочищенной зоне; и
удаления препятствия и уборки неочищенной зоны, если препятствие, расположенное в неочищенной зоне, может быть удалено.
16. Машиночитаемый носитель данных, имеющий хранящиеся на нем команды, которые при выполнении процессором устройства заставляют устройство осуществлять шаги способа по любому из пп. 1-7.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| KR 20160100149 A, 28.08.2016 | |||
| KR 20090018562 A, 20.02.2009;. | |||

