ПЕРЕКРЕСТНАЯ ССЫЛКА НА СВЯЗАННЫЕ ЗАЯВКИ
[0001] Настоящая заявка основана на Заявке №201510711332.5 на выдачу Китайского патента, все содержание которой включено в настоящий документ, и по которой испрошен приоритет. Данная заявка была подана 28 октября 2015 года.
ОБЛАСТЬ ТЕХНИКИ
[0002] Настоящее изобретение, в целом, относится к области техники сети Интернет и, более конкретно, к способу и устройству тревожной сигнализации.
УРОВЕНЬ ТЕХНИКИ
[0003] По мере того, как видеокамеры находят широкое применение в домашнем обиходе, видеоконтроль в режиме реального времени приобретает все большую и большую популярность. Когда пользователь отсутствует или спит, видеокамера может контролировать внутренний вид помещения в режиме реального времени, основываясь на технологии обнаружения изменения сцены, а также может выдавать сигнал тревоги при выявлении необычного изменения сцены. Технология обнаружения изменения сцены определяет необычное изменение сцены путем сравнения изображения, получаемого в данный момент видеокамерой, с предварительно установленной моделью сцены. Однако, когда объект неопасен для пользователя, например, домашнее животное входит в помещение, видеокамера может определить перемещение домашнего животного как необычное изменение сцены и может выдать ложный сигнал тревоги. Таким образом, важно улучшить способ сигнализации во избежание подобных ложных сигналов тревоги.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Настоящим изобретением раскрыты способ и устройство тревожной сигнализации. Техническое решение заключается в следующем.
[0005] В соответствии с первым аспектом осуществления данного изобретения заявлен способ тревожной сигнализации, включающий в себя:
[0006] получение контролируемого видеоряда;
[0007] определение, содержит ли контролируемый видеоряд движущийся объект или нет;
[0008] если контролируемый видеоряд содержит движущийся объект, - принятие решения, является ли движущийся объект заданным объектом или нет; и,
[0009] если движущийся объект является заданным объектом, - запрет отправки тревожной информации на терминал с целью включения терминалом сигнала тревоги.
[0010] В соответствии с первым аспектом в первом возможном варианте его осуществления определение того, содержит ли контролируемый видеоряд движущийся объект или нет, может включать в себя:
[0011] получение для каждого кадра видеоизображения контролируемого видеоряда пиксельного значения каждого пикселя на видеоизображении;
[0012] принятие решения, содержит ли видеоизображение пиксели переднего плана или нет, на основании пиксельного значения каждого пикселя и заданной модели фона; и,
[0013] если видеоизображение содержит пиксели переднего плана, - определение того, что контролируемый видеоряд содержит движущийся объект, в противном случае - определение того, что контролируемый видеоряд не содержит движущегося объекта.
[0014] В соответствии с первым возможным вариантом осуществления первого аспекта во втором возможном варианте осуществления первого аспекта после определения того, что контролируемый видеоряд не содержит движущийся объект, способ может также включать в себя:
[0015] обновление заданной модели фона на основании пиксельного значения каждого пикселя на видеоизображении.
[0016] В соответствии с первым аспектом в третьем возможном варианте осуществления первого аспекта принятие решения о том, является ли движущийся объект заданным объектом или нет, может включать в себя:
[0017] определение типа движущегося объекта на основании заданной модели классификации; и,
[0018] если установленный тип является заданным типом, - принятие решения, что движущийся объект является заданным объектом.
[0019] В соответствии с третьим возможным вариантом осуществления первого аспекта в четвертом возможном варианте осуществления первого аспекта определение типа движущегося объекта на основании заданной модели классификации может включать в себя:
[0020] обрезку области видеоизображения контролируемого видеоряда, в которой находится движущийся объект, для получения изображения объекта;
[0021] преобразование размера изображения объекта до предварительно установленного размера; и
[0022] определение типа движущегося объекта на основании заданной модели классификации и преобразованного изображения объекта.
[0023] В соответствии с любым из возможных вариантов осуществления от первого аспекта до четвертого возможного варианта осуществления первого аспекта в пятом возможном варианте осуществления первого аспекта заданный объект может включать в себя домашнее животное.
[0024] В соответствии со вторым аспектом осуществления данного изобретения заявлено устройство сигнализации, включающее в себя:
[0025] модуль получения, сконфигурированный для получения контролируемого видеоряда;
[0026] модуль определения, сконфигурированный для определения того, содержит ли контролируемый видеоряд движущийся объект или нет;
[0027] модуль оценки, сконфигурированный для принятия решения, является ли движущийся объект заданным объектом или нет, если контролируемый видеоряд содержит движущийся объект; и
[0028] модуль запрета отправки, сконфигурированный для запрета отправки тревожной информации на терминал, если движущийся объект является заданным объектом.
[0029] В соответствии со вторым аспектом в первом возможном варианте осуществления второго аспекта модуль определения может включать в себя:
[0030] субмодуль получения, сконфигурированный для получения пиксельного значения каждого пикселя на видеоизображении для каждого кадра видеоизображения контролируемого видеоряда;
[0031] субмодуль оценки, сконфигурированный для принятия решения о том, содержит ли видеоизображение пиксели переднего плана или нет, на основании пиксельного значения каждого пикселя и заданной модели фона; и
[0032] первый субмодуль определения, сконфигурированный для определения того, что контролируемый видеоряд содержит движущийся объект, и, в противном случае, определения того, что контролируемый видеоряд не содержит движущегося объекта, если видеоизображение содержит пиксели переднего плана.
[0033] В соответствии с первым возможным вариантом осуществления второго аспекта во втором возможном варианте осуществления второго аспекта модуль определения может также включать в себя:
[0034] субмодуль обновления, сконфигурированный для обновления заданной модели фона на основании пиксельного значения каждого пикселя на видеоизображении.
[0035] В соответствии со вторым аспектом в третьем возможном варианте осуществления второго аспекта, модуль оценки может включать в себя:
[0036] второй субмодуль определения, сконфигурированный для определения типа движущегося объекта на основании заданной модели классификации, если контролируемый видеоряд содержит движущийся объект; и
[0037] третий субмодуль определения, сконфигурированный для принятия решения, что движущийся объект является заданным объектом, если определенный тип является заданным типом.
[0038] В соответствии с третьим возможным вариантом осуществления второго аспекта в четвертом возможном варианте осуществления второго аспекта, второй субмодуль определения может включать в себя:
[0039] субмодуль обрезки, сконфигурированный для обрезки той области видеоизображения контролируемого видеоряда, в которой находится движущийся объект, для получения изображения объекта, если контролируемый видеоряд содержит движущийся объект;
[0040] субмодуль преобразования, сконфигурированный для преобразования размера изображения объекта до предварительно установленного размера; и
[0041] субмодуль определения, сконфигурированный для определения типа движущегося объекта на основании заданной модели классификации и преобразованного изображения объекта.
[0042] В соответствии с любым из возможных вариантов осуществления от второго аспекта до четвертого возможного варианта осуществления второго аспекта в пятом возможном варианте осуществления второго аспекта заданный объект может включать в себя домашнее животное.
[0043] В соответствии с третьим аспектом осуществления данного изобретения заявлено устройство сигнализации, которое может включать в себя:
[0044] процессор; и
[0045] запоминающее устройство, сконфигурированное для хранения команд, выполняемых процессором,
[0046] при этом процессор может быть сконфигурирован для выполнения следующих функций:
[0047] получение контролируемого видеоряда;
[0048] определение, содержит ли контролируемый видеоряд движущийся объект или нет;
[0049] если контролируемый видеоряд содержит движущийся объект, - принятие решения, является ли движущийся объект заданным объектом или нет; и
[0050] если движущийся объект является заданным объектом, - запрещение отправки тревожной информации на терминал.
[0051] В данном варианте осуществления изобретения сервер получает контролируемый видеоряд; определяет, содержит ли контролируемый видеоряд движущийся объект или нет; принимает решение, является ли этот движущийся объект заданным объектом или нет, если контролируемый видеоряд содержит движущийся объект; и запрещает отправку тревожной информации на терминал, если движущийся объект является заданным объектом, чем исключается выдача ложного сигнала тревоги, вызванного движением заданного объекта, снижается частота выдачи ложных сигналов и улучшается точность срабатывания сигнализации.
[0052] Следует понимать, что как вышеизложенное общее описание, так и последующее детальное описание являются всего лишь иллюстративными и поясняющими и не ограничивают объем изобретения, как оно заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0053] Чертежи, включенные в настоящую заявку и составляющие ее часть, иллюстрируют варианты осуществления в соответствии с изобретением и, вместе с описанием, служат для разъяснения принципов изобретения.
[0054] Фиг. 1 представляет собой схематическое изображение варианта осуществления оборудования по изобретению для реализации способа тревожной сигнализации в соответствии с примером его осуществления.
[0055] Фиг. 2 представляет собой блок-схему способа тревожной сигнализации в соответствии с примером его осуществления.
[0056] Фиг. 3 представляет собой блок-схему другого способа тревожной сигнализации в соответствии с примером его осуществления.
[0057] Фиг. 4 представляет собой блок-схему устройства тревожной сигнализации в соответствии с примером его осуществления.
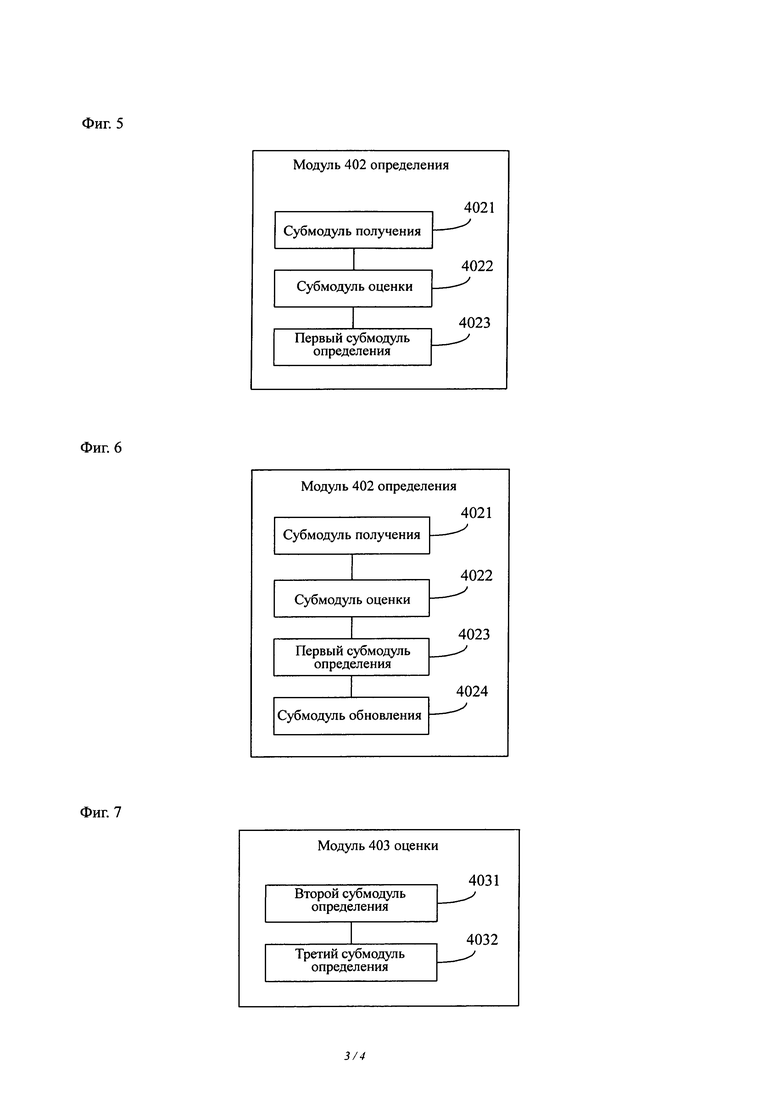
[0058] Фиг. 5 представляет собой блок-схему модуля определения в соответствии с примером его осуществления.
[0059] Фиг. 6 представляет собой блок-схему другого модуля определения в соответствии с примером его осуществления.
[0060] Фиг. 7 представляет собой блок-схему модуля оценки в соответствии с примером его осуществления.
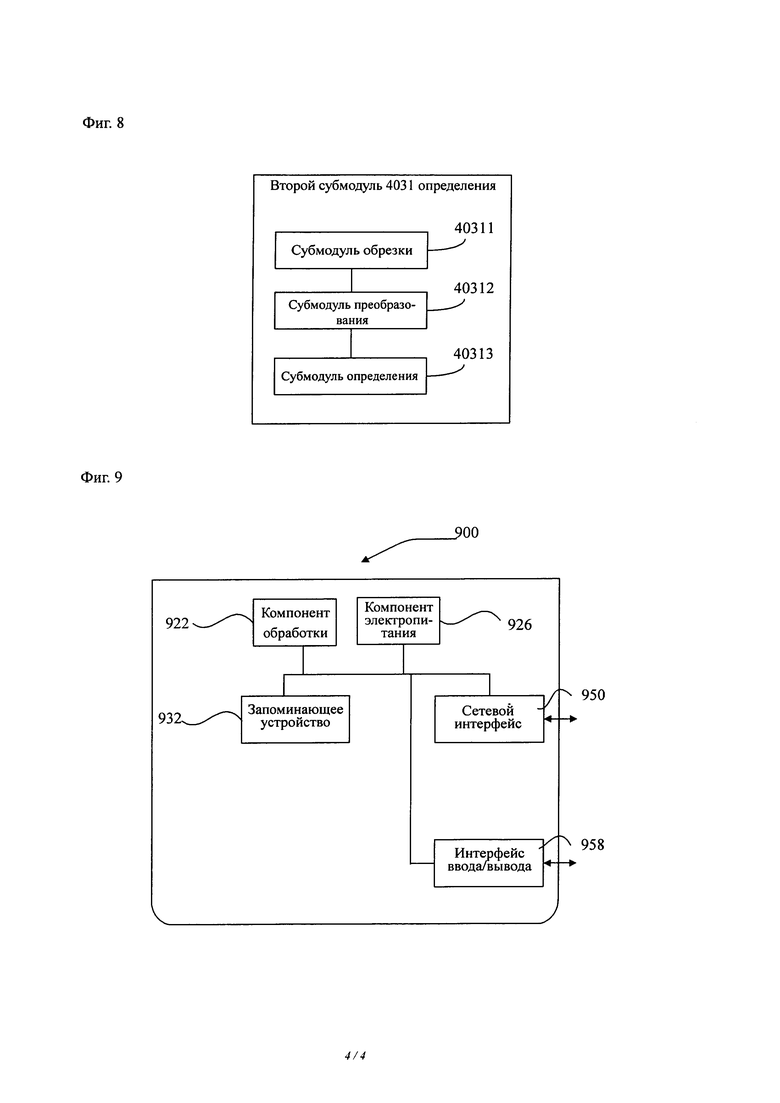
[0061] Фиг. 8 представляет собой блок-схему второго субмодуля определения в соответствии с примером осуществления.
[0062] Фиг. 9 представляет собой блок-схему другого устройства тревожной сигнализации в соответствии с примером его осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
[0063] Далее приведено подробное описание примеров осуществления изобретения, проиллюстрированных на чертежах. Приведенное ниже описание относится к чертежам, на которых одни и те же номера на разных чертежах представляют одни и те же или аналогичные элементы, если на чертежах не указано иное. Варианты осуществления, представленные в последующем описании примеров осуществления, не представляют всех вариантов осуществления, соответствующих данному изобретению. Напротив, они являются только примерами устройств и способов, соответствующих аспектам изобретения, как изложено в прилагаемых пунктах формулы изобретения.
[0064] Фиг. 1 представляет собой схематическое изображение варианта осуществления оборудования по изобретению для реализации способа тревожной сигнализации в соответствии с примером его осуществления. Как показано на Фиг. 1, вариант осуществления оборудования по изобретению может включать в себя: сервер 101, оборудование интеллектуальной камеры 102 и терминал 103. Сервер 101 может быть отдельным сервером, серверным кластером, включающим несколько серверов, или центром предоставления услуг облачных вычислений; оборудование интеллектуальной камеры 102 может быть интеллектуальной камерой; терминал 103 может быть мобильным телефоном, компьютером, планшетом и т.п. Сервер 101 может быть подключен к оборудованию интеллектуальной камеры 102 и терминалу 103 соответственно через сеть. Сервер 101 сконфигурирован для получения контролируемого видеоряда от оборудования интеллектуальной камеры и для отправки тревожной информации на терминал. Оборудование интеллектуальной камеры 102 сконфигурировано для получения контролируемого видеоряда в контролируемой зоне и отправки контролируемого видеоряда на сервер. Терминал 103 сконфигурирован для получения тревожной информации от сервера и выдачи сигнала тревоги.
[0065] Фиг. 2 представляет собой блок-схему способа тревожной сигнализации в соответствии с примером осуществления. Как показано на Фиг. 2, этот способ относится к серверу и включает в себя следующие шаги:
[0066] Шаг 201: получение контролируемого видеоряда;
[0067] Шаг 202: определение, содержится ли в контролируемом видеоряде движущийся объект или нет;
[0068] Шаг 203: если контролируемый видеоряд содержит движущийся объект, - принятие решения, является ли движущийся объект заданным объектом или нет; и
[0069] Шаг 204: если движущийся объект является заданным объектом, - запрет отправки сигнальной информации на терминал.
[0070] В некоторых вариантах осуществления настоящего изобретения сервер получает контролируемый видеоряд; определяет, содержит ли контролируемый видеоряд движущийся объект или нет; принимает решение, является ли этот движущийся объект заданным объектом, если контролируемый видеоряд содержит движущийся объект; и запрещает отправку тревожной информации на терминал, если движущийся объект является заданным объектом, чем исключается выдача ложного сигнала тревоги, вызванного движением заданного объекта, снижается частота выдачи ложных сигналов и улучшается точность срабатывания сигнализации.
[0071] В другом варианте осуществления настоящего изобретения определение, содержит ли контролируемый видеоряд движущийся объект или нет, включает в себя:
[0072] получение пиксельного значения каждого пикселя на видеоизображении для каждого кадра видеоизображения контролируемого видеоряда;
[0073] принятие решения, содержит ли видеоизображение пиксель(-и) переднего плана или нет, на основании пиксельного значения каждого пикселя и заданной модели фона; и,
[0074] если видеоизображение содержит пиксель(-и) переднего плана, - определение того, что контролируемый видеоряд содержит движущийся объект, в противном случае - определение того, что контролируемый видеоряд не содержит движущегося объекта.
[0075] Поскольку заданная модель фона сконфигурирована для представления характеристики распределения пиксельного значения каждого пикселя фона на видеоизображении по времени, на основании пиксельного значения каждого пикселя на видеоизображении и заданной модели фона можно объективно принять решение, содержит ли видеоизображение пиксель(-и) переднего плана или нет, то есть можно объективно принять решение, содержит ли контролируемый видеоряд движущийся объект или нет.
[0076] В другом варианте осуществления настоящего изобретения после определения того, что контролируемый видеоряд не содержит движущийся объект, способ далее включает в себя:
[0077] обновление заданной модели фона на основании пиксельного значения каждого пикселя на видеоизображении.
[0078] При этом обновление заданной модели фона в режиме реального времени на основании пиксельного значения каждого пикселя видеоизображения может наделять способностью к адаптации заданную модель фона, а именно сделать заданную модель фона ближе и ближе к реальной характеристике распределения пиксельных значений текущих пикселей фона во времени, чем улучшается точность обнаружения движущегося объекта.
[0079] В другом варианте осуществления настоящего изобретения принятие решения о том, является ли движущийся объект заданным объектом или нет, включает в себя:
[0080] определение типа движущегося объекта на основании заданной модели классификации; и,
[0081] если установленный тип является заданным типом, - принятие решения, что движущийся объект является заданным объектом.
[0082] При этом после того, как сервер определяет, что контролируемый видеоряд содержит движущийся объект, сервер может принять решение, является ли движущийся объект заданным объектом или нет, тем самым устраняя ложное срабатывание сигнала тревоги из-за движения заданного объекта.
[0083] В другом варианте осуществления настоящего изобретения определение типа движущегося объекта на основании заданной модели классификации включает в себя:
[0084] обрезку области видеоизображения контролируемого видео, в которой находится движущийся объект для получения изображения объекта;
[0085] преобразование размера изображения объекта до предварительно установленного размера; и
[0086] определение типа движущегося объекта на основании заданной модели классификации и преобразованного изображения объекта.
[0087] Заданная модель классификации обычно может обрабатывать изображение предварительного установленного размера для определения типа объекта, содержащегося на изображении, поэтому сервер обрезает область, в которой находится движущийся объект, для получения изображения объекта и преобразует размер изображения объекта до предварительно установленного размера заданной модели классификации для удобства определения типа движущегося объекта на основании преобразованного изображения объекта с целью улучшения эффективности определения.
[0088] В другом варианте осуществления представленного изобретения заданный объект включает в себя домашнее животное.
[0089] При этом, если заданный объект включает в себя домашнее животное, может быть исключена выдача ложного сигнала тревоги, вызванного движением заданного объекта, снижается частота выдачи ложных сигналов и улучшается точность сигнализации.
[0090] Все вышеупомянутые дополнительные технические решения могут свободно комбинироваться для формирования дополнительных вариантов осуществления настоящего изобретения и не будут отдельно подробно раскрыты в представленном варианте осуществлении настоящего изобретения.
[0091] Фиг. 3 представляет собой блок-схему другого способа тревожной сигнализации в соответствии с примером осуществления. Как показано на Фиг. 3, способ включает в себя следующие шаги.
[0092] Шаг 301: сервер получает контролируемый видеоряд.
[0093] Следует отметить, что сервер может получать контролируемый видеоряд от оборудования интеллектуальной камеры и, конечно, оборудование интеллектуальной камеры может также отправлять контролируемый видеоряд на другое оборудование, с которого сервер может получить контролируемый видеоряд. Данный документ, в частности, не ограничивает варианты осуществления настоящего изобретения.
[0094] При этом оборудование интеллектуальной камеры сконфигурировано для получения контролируемого видеоряда в контролируемой зоне, а процесс получения контролируемого видеоряда в контролируемой зоне интеллектуальной камерой может относиться к смежным областям техники и не будет отдельно подробно раскрыт в представленном варианте осуществлении настоящего изобретения.
[0095] Кроме того, оборудование интеллектуальной камеры может обмениваться данными с сервером или другим оборудованием по проводной сети или беспроводной сети, и, если оборудование интеллектуальной камеры обменивается данными с сервером или другим оборудованием по беспроводной сети, оборудование интеллектуальной камеры может обмениваться данными с сервером или другим оборудованием через встроенный коммуникационный микропроцессор Wireless Fidelity (WIFI), коммуникационный микропроцессор BlueTooth (технология ближней беспроводной связи для устройств разных типов) или любой другой коммуникационный микропроцессор беспроводной связи. Не существует специально установленных ограничений для осуществления настоящего изобретения.
[0096] Шаг 302: сервер определяет, содержит ли контролируемый видеоряд движущийся объект или нет.
[0097] Оборудование интеллектуальной камеры обычно закреплено, т.е. оборудование интеллектуальной камеры получает контролируемый видеоряд в фиксированной контролируемой зоне, а затем может выполняться определение, содержит ли контролируемый видеоряд движущийся объект или нет, путем установки модели фона для фона в фиксированной контролируемой зоне, тем самым сравнивая каждый кадр видеоизображения контролируемого видеоряда с моделью фона таким образом, чтобы при определении изображения переднего плана в фиксированной контролируемой зоне изображение переднего плана могло быть соотнесено с изображением какого-либо значимого движущегося объекта, тогда как фон остается неподвижным.
[0098] Следовательно, операция, при которой сервер определяет, содержит ли контролируемый видеоряд движущийся объект или нет, может осуществляться следующим образом: для каждого кадра видеоизображения контролируемого видеоряда сервер получает пиксельное значение каждого пикселя на видеоизображении; принимает решение, содержит ли видеоизображение пиксель(-и) переднего плана или нет на основании пиксельного значения каждого пикселя и заданной модели фона; определяет, что контролируемый видеоряд содержит движущийся объект, если видеоизображение содержит пиксель(-и) переднего плана, в противном случае он определяет, что контролируемый видеоряд не содержит движущегося объекта.
[0099] При этом заданная модель фона сконфигурирована для представления характеристики распределения пиксельного значения каждого пикселя фона на видеоизображении по времени, заданная модель фона может быть смешанной Гауссовой моделью и, конечно, заданная модель фона может быть также другой моделью. Не существует специально установленных ограничений для осуществления настоящего изобретения.
[00100] Кроме того, заданная модель фона может предварительно устанавливаться, и, например, заданная модель фона может быть предварительно установлена согласно состоянию распределения пиксельного значения каждого пикселя в заданном видеоизображении контролируемого видеоряда по времени. Конечно, для осуществления заданной модели фона могут также применяться другие методы. Не существует специально установленных ограничений для осуществления настоящего изобретения.
[00101] Цветовая характеристика является одной из важнейших характеристик изображения, цветовая характеристика может представляться пиксельным значением пикселя изображения, и пиксельное значение ссылается на числовое значение, такое как положение, цвет и яркость пикселя изображения, таким образом, что сервер может принять решение, содержит ли видеоизображение пиксель(-и) переднего плана или нет на основании пиксельного значения каждого пикселя на видеоизображении и заданной модели фона. Если видеоизображение содержит пиксель(-и) переднего плана, этого означает, что на видеоизображении присутствует значимый движущийся объект, т.е. контролируемый видеоряд содержит движущийся объект.
[00102] При этом сервер принимает решение, содержит ли видеоизображение пиксель(-и) переднего плана или нет на основании пиксельного значения каждого пикселя и заданной модели фона; сервер может сопоставлять пиксельное значение каждого пикселя и заданной модели фона, определять, что пиксели переднего плана отсутствуют на видеоизображении, если пиксельное значение каждого пикселя успешно совпадает с заданной моделью фона, или, в противном случае, определять, что видеоизображение содержит пиксель(-и) переднего плана там, где пиксели переднего плана являются пикселями с пиксельным значениями, которые не совпали с заданной моделью фона.
[00103] Кроме того, процесс сопоставления пиксельного значения каждого пикселя и заданной модели фона сервером может относиться к смежным областям техники, и не будет подробно раскрыт в представленном варианте осуществления настоящего изобретения.
[00104] Кроме того, после того, как сервер определяет, что контролируемый видеоряд не содержит движущегося объекта, сервер может также обновить заданную модель фона на основании пиксельного значения каждого пикселя на видеоизображении.
[00105] Заданная модель фона предварительно устанавливается сервером, а фон может изменяться под влиянием какого-либо непредсказуемого фактора, такого как изменение света и вибрация камеры. Поэтому во избежание ошибки обнаружения движущегося объекта по заданной модели фона в связи с накоплением изменений, вызванных таким непредсказуемым фактором, если сервер определяет, что контролируемый видеоряд не содержит движущегося объекта, сервер может обновить заданную модель фона в режиме реального времени на основании пиксельного значения каждого пикселя на видеоизображении таким образом, чтобы сделать заданную модель фона адаптивной и все более и более близкой к реальной характеристике распределения пиксельных значений текущих пикселей фона по времени, тем самым улучшая точность обнаружения движущегося объекта.
[00106] Важно заметить, что процесс обновления сервером заданной модели фона, основанный на пиксельном значении каждого пикселя на видеоизображении, может относиться к смежным областям техники и не будет подробно раскрыт в представленном варианте осуществления настоящего изобретения.
[00107] Шаг 303: если контролируемый видеоряд содержит движущийся объект, сервер принимает решение, является ли движущийся объект заданным объектом или нет.
[00108] Для того чтобы избежать ложных сигналов тревоги, вызванных передвижением заданного объекта, если сервер определяет, что контролируемый видеоряд содержит движущийся объект, сервер может принять решение, является ли движущийся объект заданным объектом или нет. Операция, при которой сервер принимает решение, является ли движущийся объект заданным объектом или нет, может выполняться следующим образом: сервер может определить тип движущегося объекта на основании заданной модели классификации, принять решение, что движущийся объект является заданным объектом, если тип движущегося объекта является заданным типом, или, в противном случае, принять решение, что движущийся объект не является заданным объектом.
[00109] Следует отметить, что заданный объект может быть предварительно установлен; заданный объект может быть объектом, который не опасен для пользователя и, например, заданный объект может включать в себя домашнее животное. Конечно, заданный объект может также включать в себя другой предмет при практическом применении, что, в частности, не ограничивается при осуществлении настоящего изобретения.
[00110] Кроме того, заданный тип - это тип заданного объекта, заданный тип соответствует заданному объекту по принципу «один к одному» и, например, если заданный объект включает в себя домашнее животное, заданный тип может включать в себя кота, собаку и т.п. Не существует специально установленных ограничений для осуществления настоящего изобретения.
[00111] Например, если сервер определяет, что тип движущегося объекта является котом на основании заданной модели классификации, и, если заданный тип включает в себя кота и собаку, тип движущегося объекта является заданным типом, и сервер может принять решение, что движущийся объект является заданным объектом.
[00112] В другом примере, если сервер определяет, что тип движущегося объекта - это человек на основании заданной модели классификации, и если заданный тип включает в себя кота и собаку, тип движущегося объекта не является заданным типом, и сервер принимает решение, что движущийся объект не является заданным объектом.
[00113] При этом, если сервер определяет тип движущегося объекта на основании заданной модели классификации, сервер может обрезать область видеоизображения контролируемого видеоряда, в которой находится движущийся объект, для получения изображения объекта, преобразования размера изображения объекта до предварительно установленного размера и определения типа движущегося объекта на основании заданной модели классификации и преобразованного изображения объекта.
[00114] При этом, если сервер обрезает область видеоизображения контролируемого видеоряда, в которой находится движущийся объект, для получения изображения объекта, сервер может отделить внешний прямоугольник с движущимся объектом от видеоизображения, где обнаружен движущийся объект, и определить внешний прямоугольник в качестве области изображения, т.е. изображения объекта, в котором находится в контролируемом видеоряде движущийся объект. Либо сервер может также получать пиксели переднего плана из видеоизображения, в котором находится движущийся объект, и объединять полученные пиксели переднего плана для получения области изображения, т.е изображения объекта, в котором находится в контролируемом видеоряде движущийся объект. Либо сервер может также удалить фоновые пиксели видеоизображения, в котором находится движущийся объект, для получения области изображения, т.е. изображения объекта, в котором находится в контролируемом видеоряде движущийся объект, при этом фоновые пиксели - это пиксели, соответствующие пиксельным значениям, которые успешно совпадают с заданной моделью фона.
[00115] Следует отметить, что заданная модель классификации сконфигурирована для определения типа, соответствующего изображению; заданная модель классификации может различать множество типов, множество типов включают в себя заданный тип; заданная модель классификации может предварительно устанавливаться, и если заданная модель классификации установлена, сервер может получать наборы изображений образцов, соответствующих множеству типов, где каждый набор изображений образца соответствует определенному типу, каждое изображение образца в каждом наборе изображений образцов может включать типы предметов, соответствующих набору изображений образца, и сервер может преобразовывать размеры изображений образца в наборах изображений образцов до предварительно установленного размера, осуществлять преобразование, сохраняя неизменными параметры слоя характеристик предустановленной модели обучения, частично настраивать параметры в слое полного подключения предустановленной модели обучения, на основании преобразованных изображений образца в наборе изображений образцов и предустановленного протокола обучения, и настраивать все параметры в слое классификатора предварительно установленной модели обучения для дальнейшего получения заданной модели классификации. Конечно, сервер может также применять другие методы для установки заданной модели классификации, что, в частности, не ограничивается при осуществлении настоящего изобретения.
[00116] Поскольку заданная модель классификации может быть предварительно установлена для улучшения эффективности определения типа, заданная модель классификации обычно может преобразовывать изображение до предварительно установленного размера с целью определения типа объекта, содержащегося на изображении. Таким образом, перед определением типа движущегося объекта, серверу требуется обрезать область, в которой находится движущийся объект, для получения изображения объекта и преобразовать размер изображения объекта до предварительно установленного для заданной модели классификации размера, чтобы было удобно определить тип движущегося объекта на основании преобразованного изображения объекта.
[00117] Кроме того, предварительно установленный размер может быть задан заранее и, например, предварительно установленный размер может быть 224*224 пикселей, 300*300 пикселей и т.п., что, в частности, не ограничивается при осуществлении настоящего изобретения.
[00118] Следует отметить, что если сервер определяет тип движущегося объекта на основании заданной модели классификации и для преобразованного изображения объекта, сервер может извлекать вектор характеристик из изображения объекта согласно заданной модели классификации, рассчитывать вероятностные значения для вероятностей того, что изображение объекта принадлежит к множеству типов, включенных в заданную модель классификации согласно вектору характеристик и заданной модели классификации, и определять тип с максимальным вероятностным значением в качестве типа движущегося объекта.
[00119] Шаг 304: если движущийся объект является заданным объектом, сервер запрещает отправку соответствующей тревожной информации на терминал.
[00120] Терминал может быть подключен к серверу по проводной сети или беспроводной сети, и, если движущийся объект является заданным объектом, т.е. движущийся объект является объектом, не опасным для пользователя, сервер запрещает отправку тревожной информации на терминал, тем самым устраняя выдачу ложных сигналов, вызванных перемещением заданного объекта, снижая частоту выдачи ложных сигналов и улучшая точность срабатывания сигнализации.
[00121] Следует отметить, что если сервер определяет, что движущийся объект не является заданным объектом, сервер также может принимать решение, следует ли отправить тревожную информацию на терминал или нет, таким образом, чтобы позволить терминалу выдать сигнал тревоги на основании заданного принципа срабатывания сигнализации.
[00122] При этом заданный принцип срабатывания сигнализации разработан для определения, следует ли отправлять тревожную информацию или нет на терминал, если движущийся объект не является заданным объектом, заданный принцип срабатывания сигнализации может быть предварительно установлен, и, например, заданный принцип срабатывания сигнализации может включать в себя принятие решения, является ли движущийся объект человеком или нет, и оправку тревожной информации на терминал, если движущийся объект является человеком. Конечно, заданный принцип срабатывания сигнализации может включать в себя другие принципы при практическом применении, что, в частности, не ограничивается при осуществлении настоящего изобретения.
[00123] Кроме того, тревожная информация предназначена для срочного сообщения пользователю о том, что необычный движущийся объект появился в контролируемой зоне.
[00124] Более того, терминал может непосредственно воспроизводить тревожную информацию через громкоговоритель терминала для уведомления пользователя и, конечно, для приведения терминала в состояние готовности могут применяться другие методы, что, в частности, не ограничивается при осуществлении настоящего изобретения.
[00125] В данном варианте осуществления настоящего изобретения сервер получает контролируемый видеоряд; определяет, содержит ли контролируемый видеоряд движущийся объект или нет; принимает решение, является ли движущийся объект заданным объектом или нет, если контролируемый видеоряд содержит движущийся объект; и запрещает отправку соответствующей тревожной информации на терминал, если движущийся объект является заданным объектом, тем самым исключая выдачу ложного сигнала тревоги, вызванного движением заданного объекта, снижая частоту выдачи ложных сигналов и улучшая точность сигнализации.
[00126] Фиг. 4 представляет собой блок-схему устройства тревожной сигнализации, в соответствии с примером осуществления. Ссылаясь на Фиг. 4, устройство включает в себя модуль 401 получения, модуль 402 определения, модуль 403 оценки и модуль 404 отправки запрета.
[00127] Модуль 401 получения сконфигурирован для получения контролируемого видеоряда;
[00128] модуль 402 определения сконфигурирован для определения того, содержит ли контролируемый видеоряд движущийся объект или нет;
[00129] модуль 403 оценки сконфигурирован для принятия решения, является ли движущийся объект заданным объектом или нет, если контролируемый видеоряд содержит движущийся объект; и
[00130] модуль 404 запрета отправки сконфигурирован для запрета отправки тревожной информации на терминал, если движущийся объект является заданным объектом.
[00131] В другом варианте осуществления настоящего изобретения, ссылаясь на Фиг. 5, модуль 402 определения включает в себя субмодуль 4021 получения, субмодуль 4022 оценки и первый субмодуль 4023 определения.
[00132] Субмодуль 4021 получения сконфигурирован для получения пиксельного значения каждого пикселя на видеоизображении для каждого кадра видеоизображения контролируемого видеоряда;
[00133] субмодуль 4022 оценки сконфигурирован для принятия решения о том, содержит ли видеоизображение пиксель(-и) переднего плана или нет, на основании пиксельного значения каждого пикселя и заданной модели фона; и
[00134] первый субмодуль 4023 определения сконфигурирован для определения того, что контролируемый видеоряд содержит движущийся объект, если видеоизображение содержит пиксель(-и) переднего плана, а, в противном случае, для определения того, что контролируемый видеоряд не содержит движущегося объекта.
[00135] В другом варианте осуществления настоящего изобретения, ссылаясь на Фиг. 6, модуль 402 определения далее включает в себя субмодуль 4024 обновления.
[00136] Субмодуль 4024 обновления сконфигурирован для обновления заданной модели фона на основании пиксельного значения каждого пикселя на видеоизображении.
[00137] В другом примере осуществления настоящего изобретения, ссылаясь на Фиг. 7, модуль 403 оценки включает в себя второй субмодуль 4031 определения и третий субмодуль 4032 определения.
[00138] Второй субмодуль 4031 определения сконфигурирован для определения типа движущегося объекта на основании заданной модели классификации, если контролируемый видеоряд содержит движущийся объект; и
[00139] третий субмодуль 4032 определения сконфигурирован для принятия решения, что движущийся объект является заданным объектом, если его тип является заданным типом.
[00140] В другом варианте осуществления настоящего изобретения, ссылаясь на Фиг. 8, второй субмодуль 4031 определения включает в себя субмодуль 40311 обрезки, субмодуль 40312 преобразования и субмодуль 40313 определения.
[00141] Субмодуль 40311 обрезки сконфигурирован для обрезки той области видеоизображения контролируемого видеоряда, в которой находится движущийся объект, с целью получения изображения объекта, если контролируемый видеоряд содержит движущийся объект;
[00142] субмодуль 40312 преобразования сконфигурирован для преобразования размера изображения объекта до предустановленного размера; и
[00143] субмодуль 40313 определения сконфигурирован для определения типа движущегося объекта на основании заданной модели классификации и преобразованного изображения объекта.
[00144] В другом варианте осуществления настоящего изобретения заданный объект включает в себя домашнее животное.
[00145] В данном варианте осуществления настоящего изобретения сервер получает контролируемый видеоряд; определяет, содержит ли контролируемой видеоряд движущийся объект или нет; принимает решение, является ли движущийся объект заданным объектом или нет, если контролируемый видеоряд содержит движущийся объект; и запрещает отправку тревожной информации на терминал, если движущийся объект является заданным объектом, тем самым устраняя выдачу ложных сигналов, вызванных перемещением заданного объекта, снижая частоту выдачи ложных сигналов и улучшая точность срабатывания сигнализации.
[00146] Что касается устройств в вышеупомянутых вариантах осуществления, конкретные методы осуществления операций отдельными модулями в этом отношении детально описаны в вариантах осуществления, связанных с соответствующими способами, которые здесь не раскрываются.
[00147] Фиг. 9 представляет собой блок-схему устройства 900 тревожной сигнализации в соответствии с примером осуществления. Например, устройство 900 может быть представлено сервером. Ссылаясь на Фиг. 9, устройство 900 включает в себя обрабатывающий компонент 922, который далее включает в себя один процессор или несколько процессоров, а также ресурс памяти, представленный запоминающим устройством 932, сконфигурированный для хранения информации, такой как выполняемые прикладные программы для обрабатывающего компонента 922. Прикладные программы, которые хранятся на запоминающем устройстве 932, могут включать в себя один модуль или более одного модуля, из которых каждый соответствует набору команд.
[00148] Устройство 900 может далее включать в себя компонент 926 электропитания, сконфигурированный для осуществления управления электропитанием устройства 900, проводной или беспроводной сетевой интерфейс 950, сконфигурированный для подключения устройства 900 к сети, и интерфейс 958 ввода/вывода (I/O). Устройство 900 может работать на основании операционной системы, которая хранится на запоминающем устройстве 932, такой как Windows ServerTM, Mac OS XTM, UnixTM, LinuxTM, FreeBSDTM и т.п.
[00149] Кроме того, обрабатывающий компонент 922 сконфигурирован для выполнения команд для выполнения следующего способа сигнализации, при этом способ включает в себя:
[00150] получение контролируемого видеоряда;
[00151] определение, содержит ли контролируемый видеоряд движущийся объект или нет;
[00152] если контролируемый видеоряд содержит движущийся объект, - принятие решения, является ли движущийся объект заданным объектом или нет; и
[00153] если движущийся объект является заданным объектом, - запрет отправки тревожной информации на терминал.
[00154] В другом варианте осуществления настоящего изобретения определение того, содержит ли контролируемый видеоряд подвижный объект или нет, включает в себя:
[00155] получение пиксельного значения каждого пикселя на видеоизображении для каждого кадра видеоизображения контролируемого видеоряда;
[00156] принятие решения, содержит ли видеоизображение пиксель(-и) переднего плана или нет на основании пиксельного значения каждого пикселя и заданной модели фона; и
[00157] определение того, что контролируемый видеоряд содержит движущийся объект, если видеоизображение содержит пиксель(-и) переднего плана, в противном случае, определение того, что контролируемый видеоряд не содержит движущегося объекта.
[00158] В другом варианте реализации настоящего изобретения, после определения того, что контролируемый видеоряд не содержит движущегося объекта, способ далее включает в себя:
[00159] обновление заданной модели фона на основании пиксельного значения каждого пикселя на видеоизображении.
[00160] В другом варианте осуществления настоящего изобретения шаг принятия решения о том, является ли движущийся объект заданным объектом, включает в себя:
[00161] определение типа движущегося объекта на основании заданной модели классификации; и,
[00162] если тип является заданным типом, - принятие решения, что движущийся объект является заданным объектом.
[00163] В другом варианте осуществления настоящего изобретения определение типа движущегося объекта на основании заданной модели классификации, включает в себя:
[00164] обрезку области в видеоизображении контролируемого видеоряда, в которой находится движущийся объект, с целью получения изображения объекта;
[00165] преобразование размера изображения объекта до предварительно установленного размера; и
[00166] определение типа движущегося объекта на основании заданной модели классификации и преобразованного изображения объекта.
[00167] В другом варианте осуществления настоящего изобретения заданный объект включает в себя домашнее животное.
[00168] В данном варианте осуществления настоящего изобретения сервер получает контролируемый видеоряд; определяет, содержит ли контролируемый видеоряд движущийся объект или нет; принимает решение, является ли движущийся объект заданным объектом или нет, если контролируемый видеоряд содержит движущийся объект; и запрещает отправку тревожной информации на терминал, если движущийся объект является заданным объектом, тем самым устраняя выдачу ложных сигналов, вызванных перемещением заданного объекта, снижая частоту выдачи ложных сигналов и улучшая точность срабатывания сигнализации.
[00169] Другие варианты осуществления данного изобретения будут очевидны для специалистов в данной области техники из рассмотрения описания и работы изобретения, описанных в настоящем документе. Предполагается, что данная заявка охватывает любые изменения, варианты использования или адаптации изобретения с соблюдением его общих принципов, включая такие отклонения от данного описания, которые возникают в рамках известной или традиционной практики в данной области техники. Предполагается, что описание и примеры считаются только примерами, при этом истинный объем изобретения указан в нижеследующей формуле изобретения.
[00170] Данное изобретение, предпочтительно, не ограничивается точной конструкцией, которая описана выше и проиллюстрирована на приложенных чертежах, и что различные модификации и изменения могут быть внесены, оставаясь в пределах его объема. Предполагается, что объем изобретения ограничивается только прилагаемой формулой изобретения.
ПРОМЫШЛЕННОЕ ПРИМЕНЕНИЕ
[00171] В данном варианте осуществления настоящего изобретения сервер получает контролируемый видеоряд; определяет, содержит ли контролируемый видеоряд движущийся объект или нет; принимает решение, является ли движущийся объект заданным объектом или нет, если контролируемый видеоряд содержит движущийся объект; и запрещает отправку тревожной информации на терминал, если движущийся объект является заданным объектом, тем самым устраняя выдачу ложных сигналов, вызванных перемещением заданного объекта, снижая частоту выдачи ложных сигналов и улучшая точность срабатывания сигнализации.

Заявленное изобретение относится к способу и устройству, принадлежащим технической области сети Интернет. Способ включает в себя: получение контролируемого видеоряда; определение, содержит ли контролируемый видеоряд движущийся объект или нет; если контролируемый видеоряд содержит движущийся объект - принятие решения, является ли движущийся объект заданным объектом или нет; и, если движущийся объект является заданным объектом, - запрет отправки тревожной информации на терминал. Заявленный способ способствует снижению возникновения ложной тревоги путем классификации типа движущегося объекта с последующим выявлением, является ли движущийся объект заранее заданным объектом. 3 н. и 14 з.п. ф-лы, 9 ил. 
1. Способ тревожной сигнализации, включающий в себя:
получение контролируемого видеоряда;
определение, содержит ли контролируемый видеоряд движущийся объект или нет;
если контролируемый видеоряд содержит движущийся объект, - принятие решения, является ли этот движущийся объект заданным объектом или нет; и,
если движущийся объект является заданным объектом, - запрет отправки тревожной информации на терминал;
при этом принятие решения, является ли движущийся объект заданным объектом или нет, включает в себя:
определение типа движущегося объекта на основании заданной модели классификации; и,
если определенный тип является заданным типом, - принятие решения, что движущийся объект является заданным объектом.
2. Способ по п. 1, отличающийся тем, что определение, является ли контролируемый видеоряд движущимся объектом или нет, включает в себя:
получение пиксельного значения для каждого пикселя на видеоизображении для каждого кадра видеоизображения контролируемого видеоряда;
принятие решения, содержит ли видеоизображение пиксели переднего плана или нет на основании пиксельного значения каждого пикселя и заданной модели фона; и,
если видеоизображение содержит пиксели переднего плана, - определение того, что контролируемый видеоряд содержит движущийся объект, в противном случае, определение того, что контролируемый видеоряд не содержит движущегося объекта.
3. Способ по п. 2, отличающийся тем, что далее включает в себя: после определения того, что контролируемый видеоряд не содержит движущегося объекта,
обновление заданной модели фона на основании пиксельного значения каждого пикселя на видеоизображении.
4. Способ по п. 1, отличающийся тем, что определение типа движущегося объекта, основанное на заданной модели классификации, включает в себя:
обрезку области на видеоизображении контролируемого видеоряда, в которой находится движущийся объект, с целью получения изображения объекта;
преобразование размера изображения объекта до предустановленного размера; и
определение типа движущегося объекта на основании заданной модели классификации и преобразованного изображения объекта.
5. Способ по п. 4, отличающийся тем, что обрезка области на видеоизображении контролируемого видеоряда, в которой находится движущийся объект, с целью получения изображения объекта, содержит:
выделение внешнего прямоугольника движущегося объекта из видеоизображения, в котором находится движущийся объект, и определение внешнего прямоугольника в качестве изображения объекта; или
получение пикселей переднего плана из видеоизображения, в котором находится движущийся объект, и объединение полученных пикселей переднего плана для получения изображения объекта; или
удаление фоновых пикселей видеоизображения, в котором находится движущийся объект, для получения изображения объекта, причем фоновые пиксели являются пикселями, соответствующими значениям пикселей, которые успешно совпадают с заданной моделью фона.
6. Способ по п. 1, также включающий в себя: установку заданной модели классификации путем получения наборов изображений образцов, соответствующих множеству типов, соответственно;
при этом заданная модель классификации сконфигурирована для различения множества типов.
7. Способ по п. 2, отличающийся тем, что заданная модель фона сконфигурирована для представления характеристики распределения пиксельного значения каждого пикселя фона на видеоизображении во временной области.
8. Способ по любому из пп. 1-7, отличающийся тем, что заданный объект включает в себя домашнее животное.
9. Устройство тревожной сигнализации, включающее в себя:
модуль получения, сконфигурированный для получения контролируемого видеоряда;
модуль определения, сконфигурированный для определения, содержит ли контролируемый видеоряд движущийся объект или нет;
модуль оценки, сконфигурированный для принятия решения, является ли движущийся объект заданным объектом или нет, если контролируемый видеоряд содержит движущийся объект; и
модуль запрета отправки, сконфигурированный для запрета отправки тревожной информации на терминал, если движущийся объект является заданным объектом;
при этом модуль оценки включает в себя:
второй субмодуль определения, сконфигурированный для определения типа движущегося объекта на основании заданной модели классификации, если контролируемый видеоряд содержит движущийся объект; и
третий субмодуль определения, сконфигурированный для принятия решения, что движущийся объект является заданным объектов, если определенный тип является заданным типом.
10. Устройство по п. 9, отличающееся тем, что модуль определения включает в себя:
субмодуль получения, сконфигурированный для получения пиксельного значения каждого пикселя на видеоизображении для каждого кадра видеоизображения контролируемого видеоряда;
субмодуль оценки, сконфигурированный для принятия решения, содержит ли видеоизображение пиксели переднего плана или нет на основании пиксельного значения каждого пикселя и заданной модели фона; и
первый субмодуль определения, сконфигурированный для определения того, что контролируемый видеоряд содержит движущийся объект, если видеоизображение содержит пиксели переднего плана, и, в противном случае, для определения того, что контролируемый видеоряд не содержит движущегося объекта.
11. Устройство по п. 10, отличающееся тем, что модуль определения далее включает в себя:
субмодуль обновления, сконфигурированный для обновления заданной модели фона на основании пиксельного значения каждого пикселя на видеоизображении.
12. Устройство по п. 9, отличающееся тем, что второй субмодуль определения включает в себя:
субмодуль обрезки, сконфигурированный для обрезки области видеоизображения контролируемого видеоряда, в которой находится движущийся объект, с целью получения изображения объекта, если контролируемый видеоряд содержит движущийся объект;
субмодуль преобразования, сконфигурированный для преобразования размера изображения объекта до предварительно установленного размера; и субмодуль определения, сконфигурированный для определения типа движущегося объекта на основании заданной модели классификации и преобразованного изображения объекта.
13. Устройство по п. 12, отличающееся тем, что субмодуль обрезки также сконфигурирован для:
выделения внешнего прямоугольника движущегося объекта из видеоизображения, в котором находится движущийся объект, и определения внешнего прямоугольника в качестве изображения объекта; или
получения пикселей переднего плана из видеоизображения, в котором находится движущийся объект, и объединения полученных пикселей переднего плана для получения изображения объекта; или
удаления фоновых пикселей видеоизображения, в котором находится движущийся объект, для получения изображения объекта, причем фоновые пиксели являются пикселями, соответствующими значениям пикселей, которые успешно совпадают с заданной моделью фона.
14. Устройство по п. 9, отличающееся тем, что заданная модель классификации устанавливается путем получения наборов изображений образцов, соответствующих множеству типов, соответственно,
при этом заданная модель классификации сконфигурирована для различения множества типов.
15. Устройство по п. 10, отличающееся тем, что заданная модель фона сконфигурирована для представления характеристики распределения пиксельного значения каждого пикселя фона на видеоизображении во временной области.
16. Устройство по пп. 9-15, отличающееся тем, что заданный объект включает в себя домашнее животное.
17. Устройство тревожной сигнализации, включающее в себя:
процессор; и запоминающее устройство, сконфигурированное для хранения команд, выполняемых процессором,
при этом процессор сконфигурирован для:
получения контролируемого видеоряда;
определения, содержит ли контролируемый видеоряд движущийся объект или нет;
если контролируемый видеоряд содержит движущийся объект, - принятия решения, является ли этот движущийся объект заданным объектом или нет; и,
если движущийся объект является заданным объектом, - запрета отправки тревожной информации на терминал;
при этом принятие решения, является ли движущийся объект заданным объектом или нет, включает в себя:
определение типа движущегося объекта на основании заданной модели классификации; и,
если определенный тип является заданным типом, - принятие решения, что движущийся объект является заданным объектом.
| Сегнетоэлектрический керамический материал | 1980 |
|
SU977437A1 |
| US 2010026871 A1, 04.02.2010 | |||
| СИГНАЛЬНОЕ УСТРОЙСТВО НАРУШЕНИЯ СТАБИЛЬНОЙ ОБСТАНОВКИ | 1998 |
|
RU2146837C1 |

