Область техники
[0001] Настоящее изобретение относится к области "умного дома", в частности к методам, устройству, машиночитаемому носителю информации и электронному оборудованию для обхода препятствий роботом-уборщиком.
Уровень техники
[0002] В последние годы, с бурным развитием компьютерных технологий и искусственного интеллекта, интеллектуальная робототехника постепенно становится объектом пристального внимания в области исследований современной робототехники. Среди них робот-подметальщик, как наиболее практичный вид интеллектуального робота, может автоматически выполнять уборочные работы на основе определенного уровня искусственного интеллекта.
[0003] В настоящее время все чаще люди используют ковры. После завершения уборки узкого участка между ковром и стеной при повороте робот-подметальщик легко может застрять.
[0004] Однако в настоящее время пока не придуман способ, как обойти такую проблему застревания. Робот-подметальщик просто так и остается в положении, в котором он застрял, пока ему не поможет человек.
Раскрытие сущности изобретения
[0005] В одном аспекте настоящего изобретения представлен способ обхода препятствий роботом-уборщиком, который можно использовать в том числе для роботов с датчиками типа поверхности, включая:
[0006] Когда робот-уборщик во время уборки вдоль края области с первым типом поверхности сталкивается с препятствиями и поворачивает, в ответ на сигнал датчика об изменении типа поверхности он обнаруживает область со вторым типом поверхности и выполняет поиск по уже созданной карте помещения, чтобы определить, имеется ли на ней область со вторым типом поверхности;
[0007] Если область со вторым типом поверхности имеется на карте помещения, он по границе этой области на карте помещения и по самой карте определяет, имеется ли путь для обхода этой области со вторым типом поверхности;
[0008] Если такой путь имеется, робот-уборщик перемещается по этому пути, чтобы обойти эту область со вторым типом поверхности;
[0009] Если такого пути нет, робот-уборщик возвращается по уже убранному маршруту, чтобы попробовать обойти область со вторым типом поверхности.
[0010] В первом варианте реализации настоящего изобретения также имеется следующее:
[0011] Если область со вторым типом поверхности отсутствует на карте помещения, проводится сканирование края этой области, результат сканирования сохраняется на карте помещения.
[0012] В одном из вариантов реализации, когда робот-уборщик убирает вдоль края области с первым типом поверхности и сталкивается с препятствиями и меняет свое направление, в ответ на сигнал изменения типа поверхности от датчика типа поверхности, после обнаружения области со вторым типом поверхностью также выполняется следующее:
[0013] Определяется, не попадали какая-либо часть робота-уборщика в область со вторым типом поверхности;
[0014] Если хотя бы часть робота-уборщика попала в область со вторым типом поверхности, робот-уборщик движется в обратном направлении, чтобы уйти от области со вторым типом поверхности.
[0015] В одном из вариантов реализации настоящего изобретения определяется, не попала ли какая-либо часть робота-уборщика в область со вторым типом поверхности, включая следующее:
[0016] Определяется, не находится ли место, где находится датчик типа поверхности на роботе-уборщике, уже в области со вторым типом поверхности;
[0017] Если место, где находится датчик типа поверхности на роботе-уборщике, уже в области со вторым типом поверхности, считается, что робот-уборщик вошел в область со вторым типом поверхности.
[0018] В одном из вариантов реализации настоящего изобретения определяется, находится ли датчик типа поверхности на роботе-уборщике в области со вторым типом поверхности, включая следующее:
[0019] Датчик типа поверхности подает ультразвуковой сигнал в направлении, вертикальном к текущей поверхности, и принимает эхо-сигнал, отраженный от текущей поверхности; при этом датчик типа поверхности является ультразвуковым датчиком;
[0020] Определяется, отличается ли фактически полученный эхо-сигнал от эхо-сигнала, отраженного от области с первым типом поверхности, и если отличается, считается, что датчик типа поверхности уже находится в области со вторым типом поверхности.
[0021] В одном из вариантов реализации настоящего изобретения робот-уборщик возвращается обратно по маршруту, где уже выполнена уборка, включая следующее:
[0022] Когда определяется, что робот-уборщик вышел из области со вторым типом поверхности, он поворачивается на месте таким образом, чтобы направление его движения было параллельно краю области с первым типом поверхности;
[0023] Робот-уборщик возвращается по выбранному направлению движения.
[0024] В одном из вариантов реализации настоящего изобретения после обнаружения области со вторым типом поверхности также выполняется следующее:
[0025] Определяется, проходит ли маршрут уже выполненной уборки робота-уборщика вдоль стены;
[0026] Если маршрут выполненной уборки робота-уборщика проходит вдоль стены, робот-уборщик возвращается по траектории вдоль стены.
[0027] В одном из вариантов реализации изобретения на основе карты помещения определяется, не находится ли за роботом-уборщиком область со вторым типом поверхности;
[0028] Если за роботом-уборщиком находится область со вторым типом поверхности, робот-уборщик возвращается по маршруту уже выполненной уборки.
[0029] В одном из вариантов реализации настоящего изобретения возврат робота-уборщика по траектории вдоль стены или по маршруту уже выполненной уборки включает в себя:
[0030] Робот-уборщик отходит назад по маршруту вдоль стены или по маршруту уже выполненной уборки;
[0031] После отхода на заданное расстояние робот-уборщик поворачивается на месте;
[0032] Если в ответ на сигнал изменения типа поверхности от датчика типа поверхности обнаруживается область со вторым типом поверхности, робот-уборщик продолжает отходить назад до тех пор, пока датчик типа поверхности не перестанет получать сигнал изменения типа поверхности.
[0033] В одном из вариантов реализации настоящего изобретения, если указанный маршрут не существует, также выполнялось следующее:
[0034] Сигнал изменения типа поверхности от датчика типа поверхности игнорируется, и робот-уборщик дальше продолжает поворачиваться для возврата по маршруту уже выполненной уборки.
[0035] В одном из вариантов реализации настоящего изобретения в процессе игнорирования сигнала изменения типа поверхности от датчика типа поверхности и поворота робота-уборщика для возврата по траектории уже выполненной уборки также выполняется следующее:
[0036] Определяется, не исчез ли сигнал изменения типа поверхности от датчика типа поверхности;
[0037] Если сигнал изменения типа поверхности от датчика исчез, робот-уборщик перемещается вперед на заданное расстояние и останавливается, делает один оборот, и определяется, не покинул ли робот-уборщик область со вторым типом поверхности.
[0038] В одном из вариантов реализации настоящего изобретения определяется, не покинул ли робот-уборщик область со вторым типом поверхности, включая следующее:
[0039] Если на датчике типа поверхности срабатывает сигнал изменения типа поверхности, робот-уборщик продолжает возвращаться по маршруту уже выполненной уборки;
[0040] Если на датчике типа поверхности не срабатывает сигнал изменения типа поверхности, робот-уборщик переходит в обычный режим уборки.
[0041] В одном из вариантов реализации настоящего изобретения данный способ используется для того, чтобы робот-уборщик находился в режиме уборки только области с первым типом поверхности.
[0042] В одном аспекте настоящего изобретения представлено устройство для обхода препятствий роботом-уборщиком, которое можно устанавливать в том числе и на роботах-уборщиках с датчиками типа поверхности, включая:
[0043] Модуль определения типа поверхности, который используется, когда робот-уборщик во время уборки вдоль края области с первым типом поверхности сталкивается с препятствиями и поворачивает, в ответ на сигнал об изменении типа поверхности от датчика типа поверхности он обнаруживает область со вторым типом поверхности и выполняет поиск по уже созданной карте помещения, чтобы определить, имеется ли на ней область со вторым типом поверхности;
[0044] Первый модуль управления, который используется для поиска пути обхода области со вторым типом поверхности, когда по границе области со вторым типом поверхности на карте помещения и по самой карте помещения определяется, что эта область со вторым типом поверхности имеется на карте помещения; если такой путь обхода существует, робот-уборщик перемещается по нему с целью обхода области со вторым типом поверхности;
[0045] Второй модуль управления используется для того, чтобы робот-уборщик возвращался по маршруту уже выполненной уборки, если такого пути не существует, чтобы обойти область со вторым типом поверхности.
[0046] В одном аспекте настоящего изобретения предусмотрен машиночитаемый носитель информации, на котором хранится компьютерная программа, которая выполняется процессором для реализации описанных выше действий робота-уборщика по обходу препятствий.
[0047] Следует понимать, что приведенное выше общее описание и последующее подробное описание предназначены лишь для иллюстрации и пояснений и не могут ограничивать данное изобретение.
Описание прилагаемых чертежей
[0048] Прилагаемые чертежи, которые включены в настоящее описание и составляют его часть, иллюстрируют варианты реализации данного изобретения и вместе с описанием служат для пояснения принципов действия изобретения. Очевидно, что чертежи, представленные ниже, показывают лишь некоторые варианты реализации настоящего изобретения; специалисты в данной области техники могут на их основе получить другие чертежи, не прилагая усилий по изобретению.
[0049] На фиг. 1 показан вид в косоугольной проекции автоматического уборочного оборудования в одном из вариантов реализации настоящего изобретения;
[0050] На фиг. 2 показано схематическое изображение конструкции днища автоматического уборочного оборудования в одном из вариантов реализации настоящего изобретения;
[0051] На фиг. 3 показан вид в косоугольной проекции приводного колеса с одной стороны в одном из вариантов реализации настоящего изобретения;
[0052] На фиг. 4 показан вид спереди приводного колеса в одном из вариантов реализации настоящего изобретения;
[0053] На фиг. 5 показан вид в косоугольной проекции пылесборника в одном из вариантов реализации настоящего изобретения;
[0054] На фиг. 6 показан вид в косоугольной проекции вентилятора в одном из вариантов реализации настоящего изобретения;
[0055] На фиг. 7 показано схематическое изображение пылесборника в открытом виде в одном из вариантов реализации настоящего изобретения;
[0056] На фиг. 8 показано схематическое изображение комбинации пылесборника и вентилятора в одном из вариантов реализации настоящего изобретения;
[0057] На фиг. 9 показан вид деталировочный чертеж автоматического уборочного оборудования в одном из вариантов реализации настоящего изобретения;
[0058] На фиг. 10 представлена структурная схема опорной платформы автоматического уборочного оборудования в одном из вариантов реализации изобретения;
[0059] На фиг. 11 показана структурная схема вибрационного элемента автоматического уборочного оборудования в одном из вариантов реализации настоящего изобретения;
[0060] На фиг. 12 показано схематическое изображение кривошипно-ползунного механизма привода чистящей головки в другом варианте реализации настоящего изобретения;
[0061] На фиг. 13 показано схематическое изображение двухкривошипного механизма привода чистящей головки в другом варианте реализации настоящего изобретения;
[0062] На фиг. 14 показано схематическое изображение кривошипного механизма привода чистящей головки в другом варианте реализации настоящего изобретения;
[0063] На фиг. 15 показано схематическое изображение автоматического уборочного оборудования в поднятом положении в одном из вариантов реализации настоящего изобретения;
[0064] На фиг. 16 показано схематическое изображение автоматического уборочного оборудования в опущенном положении в одном из вариантов реализации настоящего изобретения;
[0065] На фиг. 17 показано схематическое изображение положения подъема на подъемном механизме с 4 соединительными рычагами в одном из вариантов реализации настоящего изобретения;
[0066] На фиг. 18 показано схематическое изображение положения опускания на подъемном механизме с 4 соединительными рычагами в одном из вариантов реализации настоящего изобретения;
[0067] На фиг. 19 показана схема движения робота-уборщика при уборке вдоль стены в одном из вариантов реализации настоящего изобретения;
[0068] На фиг. 20 показано схематическое изображение робота-уборщика, когда он застревает при уборке вдоль стены в одном из вариантов реализации настоящего изобретения;
[0069] На фиг. 21 показана схема 1 движения робота-уборщика при уборке вдоль края ковра в одном из вариантов реализации настоящего изобретения;
[0070] На фиг. 22 показана схема 2 движения робота-уборщика при уборке вдоль края ковра в одном из вариантов реализации настоящего изобретения;
[0071] На фиг. 23 показана схема 3 движения робота-уборщика при уборке вдоль края ковра в одном из вариантов реализации настоящего изобретения;
[0072] На фиг. 24 показано схематическое изображение робота-уборщика, когда он застревает при уборке вдоль края ковра в одном из вариантов реализации настоящего изобретения;
[0073] На фиг. 25 показана технологическая схема обхода препятствия роботом-уборщиком в одном из вариантов реализации настоящего изобретения;
[0074] На фиг. 26 показана осциллограмма эхо-сигнала, обычной поверхности, принимаемого ультразвуковым датчиком в соответствии с вариантом реализации настоящего изобретения;
[0075] На фиг. 27 показана осциллограмма эхо-сигнала поверхности ковра, принимаемого ультразвуковым датчиком в соответствии с вариантом реализации настоящего изобретения;
[0076] На фиг. 28 показана блок-схема устройства для обхода препятствий роботом-уборщиком в одном из вариантов реализации настоящего изобретения;
[0077] На фиг. 29 показано схематическое изображение модуля электронного оборудования в соответствии с вариантом реализации настоящего изобретения;
[0078] На фиг. 30 показано схематическое изображение программного продукта в соответствии с вариантом реализации настоящего изобретения.
Конкретные варианты реализации
[0079] Теперь варианты реализации будут описаны более подробно со ссылкой на прилагаемые чертежи. Однако каждый вариант реализации может быть реализован во многих формах, и его не следует ограничивать лишь описанным здесь вариантом; напротив, эти варианты реализации делают изобретение более всеобъемлющим и полным, идея вариантов реализации полностью доведены до сведения технических специалистов в данной области. Одни и те же обозначения на чертежах указывают на одни и те же или похожие детали, поэтому повторяющиеся их описания будут опущены.
[0080] Хотя в данном документе для описания относительного положения между разными элементами, указанными на чертежах, используются такие термины относительности, как "вверху" и "внизу", они предназначены только для удобства, например, для обозначения направления в примерах реализации на чертежах. Понятно, что если устройство, обозначенное на чертежах, перевернуть вверх ногами, то "верхний" элемент станет "нижним". То же относится и к другим терминам относительности, таким как "высокий", низкий", "верх", "низ", "левый", "правый" и пр. Когда одна структура находится "над" другой, это может означать, что эта структура образована на других структурах, или что она "непосредственно" установлена на других структурах, или что она "опосредованно" установлена на других структурах через другую структуру.
[0081] Термины "один", "тот, этот", "описанный выше" указывают на существование одного или нескольких элементов, различия в составе и пр.; термины "включая" и "имеет" используются для обозначения открытого включения и указывают на существование других элементов/различий в составе и пр. помимо уже перечисленных.
[0082] На фиг. 1-2 показана структурная схема автоматического уборочного оборудования в соответствии с примерным вариантом реализации; как показано на фиг. 1-2, автоматическое уборочное оборудование может представлять собой робот-пылесос, робот-полотер, робот для мытья окон и т.д.; автоматическое уборочное оборудование может включать в себя подвижную платформу 100, сенсорную систему 120, систему управления 130, приводную систему 140, уборочный модуль 150, систему питания 160 и систему человеко-машинного взаимодействия 170. В том числе:
[0083] Подвижная платформа 100 может быть выполнена с возможностью автоматического перемещения по рабочей поверхности в заданном направлении. Рабочая поверхность - это поверхность, очищаемая автоматическим уборочным оборудованием. В некоторых вариантах реализации автоматическое уборочное оборудование может быть роботом для уборки пола, в этом случае автоматическое уборочное оборудование работает на полу, который является рабочей поверхностью; автоматическое уборочное оборудование также может быть роботом для мойки окон, тогда автоматическое уборочное оборудование работает на внешней поверхности окон здания, и рабочей поверхностью является стекло;
автоматическое уборочное оборудование также может быть роботом для прочистки труб, тогда автоматическое уборочное оборудование работает на внутренней поверхности труб, и рабочей поверхностью является внутренняя поверхность трубы. Исключительно для целей демонстрации, в следующем описании изобретения по данной заявке в качестве примера используется робот для уборки пола.
[0084] В некоторых вариантах реализации подвижная платформа 100, может быть, как автономной подвижной платформой, так и неавтономной подвижной платформой. Автономная подвижная платформа является подвижной платформой 100, которая способна сама автоматически и адаптивно принимать решения о начале работы на основе неожиданных данных, полученных от окружающей среды; неавтономная подвижная платформа не способна адаптивно принимать решения о начале работы на основе неожиданных данных, полученных от окружающей среды, но способна выполнять установленную программу или работать в соответствии с определенной логикой. Соответственно, если подвижная платформа 100 является автономной подвижной платформой, направление ее движения может определяться независимо автоматическим уборочным оборудованием; если подвижная платформа 100 является неавтономной подвижной платформой, направление движения может определяться системой или вручную. Если подвижная платформа 100 является автономной, она включает в себя переднюю часть 111 и заднюю часть 110.
[0085] Сенсорная система 120 включает в себя устройство определения положения 121, расположенное вверху подвижной платформой 100, буфер 122, расположенный в передней части 111 подвижной платформы 100, датчик обрыва 123, расположенный в нижней части подвижной платформы, и ультразвуковой датчик (не показан на схеме), инфракрасный датчик (не показан на схеме), магнитометр (не показан на схеме), акселерометр (не показан на схеме), гироскоп (не показан на схеме), одометр (не показан на схеме) и другие сенсорные устройства, которые предоставляют системе управления 130 информацию о местоположении и перемещении робота.
[0086] Чтобы более понятно описать действия автоматического уборочного оборудования, определим следующие направления его движения: автоматическое уборочное оборудование может перемещаться по полу в разных комбинациях трех вертикальных относительно друг друга осей, определяемых подвижной платформой 100: горизонтально по оси X, вперед и назад по оси Y и по центральной вертикальной оси Z. Направление движения вперед вдоль оси Y обозначается как "вперед", направление движения назад вдоль оси Y обозначается как "назад". Поперечная ось X, по существу, проходит между правым и левым колесом автоматического уборочного оборудования вдоль оси, определяемой центральной точкой узла приводного колеса 141. При этом автоматическое уборочное оборудование может поворачиваться вокруг оси X. Когда передняя часть автоматического уборочного оборудования направлена вверх, а задняя часть направлена вниз, это означает "поднятие вверх", а когда передняя часть автоматического уборочного оборудования наклонена вниз, а задняя часть наклонена вверх, это означает "опускание вниз". Кроме того, автоматическое уборочное оборудование может поворачиваться вокруг оси Z. Когда автоматическое уборочное оборудование направлено вперед и вправо от оси Y, это "правый поворот", а когда автоматическое уборочное оборудование наклонено в левую сторону от оси Y, это "левый поворот".
[0087] Как показано на фиг. 2, на нижней части подвижной платформы 100 и спереди и позади узла приводного колеса 141 имеется датчик обрыва 123, который предназначен для предотвращения падения автоматического уборочного оборудования во время отхода назад, что позволяет избежать повреждения автоматического уборочного оборудования. Выражение "спереди" выше означает сторону в направлении движения автоматического уборочного оборудования, а выражение "сзади" означает сторону, противоположной направлению движения автоматического уборочного оборудования.
[0088] Устройство определения местоположения 121 включает в себя, без ограничений, камеру, лазерный дальномер (LDS, прямое лазерное структурирование).
[0089] Разные компоненты сенсорной системы 120 могут работать как независимо, так и вместе для более точного выполнения своих функций. Поверхность для уборки определяется датчиком обрыва 123 и ультразвуковым датчиком, которые определяют физические характеристики убираемой поверхности, включая материал поверхности, чистоту и т.д., для более точного определения могут быть задействованы камера, лазерный дальномер и другие устройства.
[0090] Например, ультразвуковой датчик может использоваться для определения того, является ли убираемая поверхность ковром; если датчик определяет, что поверхность, убираемая поверхность имеет ковровое покрытие, система управления 130 переводит автоматическое уборочное оборудование в режим очистки ковра.
[0091] Передняя часть 111 подвижной платформы 100 снабжена буфером 122; когда во время уборки узел приводного колеса 141 приводит в движение автоматическое уборочное оборудование, буфер 122 с помощью датчиков, например инфракрасного, обнаруживает на пути движения автоматического уборочного оборудования одно или более событий (или объектов); при обнаружении буфером 122 событий (или объектов), таких как препятствие, стена, узел приводного колеса 141 заставляет автоматическое уборочное оборудование реагировать на событие (или объект), например, держаться подальше от препятствий.
[0092] Система управления 130 реализована на электрической системной плате внутри подвижной платформы 100, включающей в себя вычислительный процессор, такой как центральный процессор, прикладной процессор, которые взаимодействуют с такой нерабочей памятью, как жесткий диск, флеш-память, ЗУПД; прикладной процессор предназначен для получения информации об окружающей среде, передаваемой датчиками сенсорной системы 120, и использования алгоритма позиционирования, такого как SLAM, в соответствии с данными о препятствиях, полученными от лазерного дальномера, чтобы составить карту окружающей среды в реальном времени, где находится сейчас автоматическое уборочное оборудование, после чего в соответствии с данными об окружении и картой окружения самостоятельно определяется маршрут движения, и приводная система 140 в соответствии с самостоятельно определенным маршрутом движения приводит автоматическое уборочное оборудование в движение вперед, назад и/или в стороны. Кроме того, система управления 130 может также на основе информации об окружении и карты окружения среде принимать решение о том, запускать ли в работу уборочный модуль 150.
[0093] В частности, система управления 130 может на основе информации о расстоянии и скорости, полученной от буфера 122, датчика обрыва 123, ультразвукового и инфракрасного датчиков, магнитометра, акселерометра, гироскопа, одометра и других сенсорных устройств определять, в каком рабочем состоянии в данный момент находится уборочная машина, например, при пересечении порога, на ковре, у обрыва, при застревании вверху или вниз, при заполнении пылесборника, подъеме вверх и т.д., и в зависимости от конкретной ситуации дает конкретные указания по дальнейшим действиям, чтобы работа автоматического уборочного оборудования в большей степени соответствовала потребностям владельца и была удобной для него. Кроме того, система управления может планировать наиболее эффективный и разумный маршрут и способ уборки на основе картографической информации, отображаемой SLAM в режиме реального времени, что значительно повышает эффективность работы автоматического уборочного оборудования.
[0094] Приводная система 140 выполняет команды приведения в движение на основе такой конкретной информации о расстоянии и угле, как компоненты х, у и θ, и управляет движением автоматического уборочного оборудования по поверхности. На фиг. 3 и фиг. 4 показан вид в косоугольной проекции и вид спереди узла приводного колеса 141 с одной стороны в одном из вариантов реализации настоящего изобретения; как показано на рисунке, приводная система 140 содержит узел приводного колеса 141 и может одновременно управлять движением левого и правого колес; чтобы более точно управлять движением робота, желательно, чтобы приводная система 140 включала в себя узел левого приводного колеса и узел правого приводного колеса. Узлы левого и правого приводного колеса располагаются симметрично по горизонтальной оси, определяемой подвижной платформой 100. Узел ведущего колеса содержит корпус и соединительную раму; узел ведущего колеса соответственно снабжен приводным двигателем 146, приводной двигатель 146 расположен снаружи узла 141 ведущего колеса, а ось приводного двигателя 146 расположена в проекции поперечного сечения привода колесный узел, приводной колесный узел 141 также может быть подключен к цепи и одометру для измерения тока привода.
[0095] Для того чтобы автоматическое уборочное оборудование могло перемещаться по поверхности более ровно или более динамично, оно может включать в себя один или несколько узлов поворотного механизма 142, которые могут может быть ведомым или ведущим колесом; конструкция такого узла включает, без ограничений, всенаправленное колесо, узел поворотного механизма 142 может располагаться перед узлом приводного колеса 141.
[0096] Приводной двигатель 146 обеспечивает мощность для вращения узла приводного колеса 141 и/или узла поворотного механизма 142.
[0097] Узел приводного колеса 141 может иметь разъемное соединение с подвижной платформой 100 для удобства демонтажа и технического обслуживания. Приводное колесо может иметь подвеску со смещением и с подвижным креплением, например, с возможностью поворота на подвижной платформе 100 автоматического уборочного оборудования и посредством упругого элемента 143, такого как пружина растяжения или нажимная пружина, которые с определенным усилием поддерживают контакт и сцепление с рабочей поверхностью, в то время как уборочный модуль 150 автоматического уборочного оборудования также контактирует с очищаемой поверхностью с определенным давлением.
[0098] Система питания 160 включает в себя перезаряжаемые батареи, такие как никель-металлогидридные и литиевые батареи. Перезаряжаемые батареи могут подключаться к схеме управления зарядкой, схеме определения температуры зарядки батарейного блока, схеме контроля падения напряжения батареи; схема управления зарядкой, схема определения температуры зарядки батарейного блока и схема контроля падения напряжения батареи затем подключаются к цепи управления микроконтроллера. Главное устройство соединяется с зарядной станцией для зарядки через зарядный электрод, расположенный сбоку или внизу корпуса. Если открытый зарядный электрод покрыт пылью, из-за кумулятивного эффекта электрического заряда в процессе зарядки пластиковый корпус вокруг электрода расплавится и деформируется вплоть до того, что даже сам электрод деформируется и не сможет продолжать нормальную зарядку.
[0099] Система человеко-машинного взаимодействия 170 включает в себя кнопки на панели главного устройства для выбора функций пользователем; также она может включать в себя экран дисплея, и/или индикаторы, и/или динамики; экран дисплея, индикаторы и динамики показывают пользователю текущее состояние машины или параметры функций; также она может включать в себя мобильный клиент. Если уборочное оборудование оснащено функцией навигации по маршруту, мобильный клиент может показывать пользователям карту окружения, в котором находится оборудование, а также местоположение уборочного оборудования, реализуя более широкий и персонифицированный пользовательский функционал.
[00100] Уборочный модуль 150 может включать в себя модуль сухой уборки 151 и/или модуль влажной уборки 400.
[00101] Как показано на фиг. 5-8, модуль сухой уборки 151 включает в себя валиковую щетку, пылесборник, вентилятор и воздуховыпускное отверстие. Валиковая щетка, которая в определенной степени контактирует с полом, подметает мусор с пола и перемещает его к отверстию для всасывания пыли между валиковой щеткой и пылесборником, а затем мусор всасывается в пылесборник потоком воздуха, создаваемым вентилятором и проходящим через пылесборник. Способность подметальной машины к удалению пыли можно охарактеризовать эффективностью уборки мусора DPU (Dust pickup efficiency) мусора; на эффективность уборки влияют конструкция и материал валиковой щетки, а также отверстие для всасывания пыли, пылесборник, вентилятор, воздуховыпускное отверстие и коэффициент использования воздуха в воздуховоде, образованном их соединительными частями, тип и мощность вентилятора, и это сложная проблема проектирования системы. По сравнению с обычными подключаемыми пылесосами, для автоматического уборочного оборудования с ограниченным питанием повышение эффективности удаления пыли имеет большое значение. Повышение эффективности удаления пыли напрямую и эффективно снижает энергозатраты, то есть если раньше одна зарядка позволяла убирать 80 кв. метров площади, то теперь это может быть 180 кв. метров или даже больше. Кроме того, уменьшение частоты зарядка значительно увеличивает срок службы батарей, так снижает частоту замены батарей пользователем. Более очевидно и важно то, что повышение эффективности удаления пыли является наиболее заметным и важным для пользователя, и пользователь может непосредственно сделать вывод о том, насколько качественно выполнена уборка. Модуль сухой уборки может также включать в себя боковую щетку 157, имеющую ось вращения, которая располагается под определенным углом по отношению к земле, для перемещения мусора в зону валиковой щетки уборочного модуля 150.
[00102] Фиг. 5 - схема конструкции пылесборника 152 в модуле сухой уборки, фиг. 6 - схема конструкции вентилятора 156 в модуле сухой уборки, фиг. 7 - схема пылесборника 152 в открытом состоянии, фиг. 8 - схема пылесборника и вентилятора в собранном состоянии.
[00103] Валиковая щетка, которая имеет взаимодействует с поверхностью, подметает мусор и подкатывает его к отверстию для всасывания пыли 154 между валиковой щеткой и пылесборником 152, а затем мусор всасывается в пылесборник потоком воздуха, создаваемым вентилятором 156 и проходящим через пылесборник 152; мусор изолируется фильтром 153 внутри пылесборника 152 с одной стороны отверстия для всасывания пыли 154, фильтр 153 полностью изолирует отверстие для всасывания пыли от воздуховыпускного отверстия, отфильтрованный воздух поступает в вентилятор 156 через воздуховыпускное отверстие 155.
[00104] Как правило, отверстие для всасывания пыли 154 пылесборника 152 расположено в передней части машины, воздуховыпускное отверстие 155 находится сбоку пылесборника 152, отверстие для всасывания воздуха вентилятора 156 соединяется с воздуховыпускным отверстием пылесборника.
[00105] Передняя панель пылесборника 152 может открываться для уборки мусора из пылесборника 152.
[00106] Фильтр 153 и пылесборник 152 являются съемными, чтобы их можно было извлекать и очищать.
[00107] Согласно конкретному варианту реализации настоящего изобретения, как показано на фиг. 9-11, модуль влажной уборки 400, предусмотренный настоящим изобретением, предназначен для влажной уборки по меньшей мере части рабочей поверхности; при этом модуль влажной уборки 400 содержит чистящую головку 410, приводной блок 420, при этом чистящая головка 410 предназначается для уборки по меньшей мере части рабочей поверхности, приводной блок 420 предназначается для приведения чистящей головки 410 в возвратно-поступательное движение вдоль целевой поверхности, целевая поверхность является частью рабочей поверхности. Чистящая головка 410 совершает возвратно-поступательное движение вдоль очищаемой поверхности, и поверхность контакта между чистящей головкой 410 и очищаемой поверхностью снабжена чистящей тканью или чистящей пластиной, которые создают высокочастотное трение с очищаемой поверхностью посредством возвратно-поступательного движения, тем самым удаляя пятна на очищаемой поверхности. Возвратно-поступательное движение может быть повторяющимся движением в любом одном или нескольких направлениях в пределах рабочей поверхности, или это может быть вибрация, перпендикулярная рабочей поверхности, здесь нет строгих ограничений.
[00108] Как показано на фиг. 9, приводной блок 420 содержит приводную платформу 421, соединенную с нижней поверхностью подвижной платформы 100, для обеспечения движущей силы; опорную платформу 422, которая имеет разъемное соединение с приводной платформой 421, для поддержки чистящей головки 410, которая может подниматься вверх и опускаться вниз под действием приводной платформы 421.
[00109] Между уборочным модулем 150 и подвижной платформой 100 предусмотрен модуль подъемника, который улучшает контакт уборочного модуля 150 с очищаемой поверхностью или выбирает разные стратегии очистки в зависимости от материала очищаемой поверхности.
[00110] Модуль сухой уборки 151 может соединяться с подвижной платформой 100 через пассивный модуль подъемника; когда уборочное оборудование сталкивается с препятствием, модуль сухой уборки 151 может легче преодолевать препятствие с помощью модуля подъемника.
[00111] Модуль влажной уборки 400 может соединяться с подвижной платформой 100 через активный модуль подъемника; если модуль влажной уборки 400 временно не участвует в работе или сталкивается с очищаемой поверхностью, которая не может быть очищена модулем влажной уборки 400, он поднимается активным модулем подъемника с очищаемой поверхности, что позволяет реализовать изменения в методах уборки.
[00112] Как показано на фиг. 10-11, приводная платформа 421 содержит двигатель 4211, расположенный на стороне приводной платформы 421 рядом с подвижной платформой 100, м выдающий мощность через выходной вал двигателя; приводное колесо 4212, соединенное с выходным валом двигателя, которое имеет асимметричную конструкцию; вибрационный элемент 4213, расположенный на стороне приводной платформы 421, противоположной от той, где находится двигатель 4211, соединенный с приводным колесом 4212, при асимметричном вращении приводного колеса 4212 создается возвратно-поступательное движение.
[00113] Приводная платформа 421 может дополнительно включать в себя приводное колесо и зубчатый механизм. Зубчатый механизм 235 может соединяться с двигателем 4211 и приводным колесом 4212. Двигатель 4211 может приводить приводное колесо 4212 во вращательное движение непосредственно, а также косвенно через зубчатый механизм. Обычный специалист в данной области техники может понять, что зубчатый механизм может представлять собой как одну шестерню, так и блок из нескольких шестерен.
[00114] Двигатель 4211 передает мощность сразу на чистящую головку 410, приводную платформу 421, опорную платформу 422, механизм подачи воды, резервуар для воды и т.д. через устройство передачи мощности. Система питания 160 обеспечивает питание двигателя 4211 и работает в целом под управлением системы управления 130. Устройством передачи мощности может быть зубчатая передача, цепная передача, ременная передача, червяк и червячное колесо и пр.
[00115] Двигатель 4211 имеет режим прямого вывода и режим обратного вывода; в режиме прямого вывода двигатель 4211 вращается вперед, в режиме обратного вывода - назад; в режиме прямого вывода двигатель 4211 может одновременно приводить в синхронное действие чистящую головку 410 и механизм подачи воды в узле влажной уборки 400 через устройство передачи мощности.
[00116] Кроме того, приводная платформа 421 также содержит соединительную штангу 4214, которая выдвигается вдоль края приводной платформы 421, соединяя приводное колесо 4212 и вибрационный элемент 4213 таким образом, чтобы вибрационный элемент 4213 выдвигался в заданное положение, при этом направление выдвижения вибрационного элемента 4213 перпендикулярно соединительной штанге 4214.
[00117] Двигатель 4211 через устройство передачи мощности соединяется с приводным колесом 4212, вибрационным элементом 4213, соединительной штангой 4214 и виброизолирующим устройством 4215. Когда запускается модуль влажной уборки 400, двигатель 4211 начинает вращаться вперед, через приводное колесо 4212 приводит в движение соединительную штангу 4214 вдоль поверхности приводной платформы 421, совершая возвратно-поступательное движение, в то же время виброизолирующее устройство 4215 приводит в движение вибрационный элемент 4213 вдоль поверхности приводной платформы 421, совершая возвратно-поступательное движение; вибрационный элемент 4213 приводит в движение очищающую подложку 4221 вдоль поверхности опорной платформы 422, совершая возвратно-поступательное движение, а очищающая подложка 4221 приводит в движение активную область 412 вдоль очищаемой поверхности, совершая возвратно-поступательное движение. В это время насос для чистой воды забирает чистую воду из резервуара для чистой воды и разбрызгивает ее на чистящую головку 410 через выпускное устройство 4217, после чего чистящая головка 410 очищает поверхность возвратно-поступательным движением.
[00118] Интенсивность/эффективность уборки автоматического уборочного оборудования также может автоматически и динамически регулироваться в зависимости от рабочей среды автоматического уборочного оборудования. Например, автоматическое уборное оборудование может динамически регулироваться на основе информации о физических свойствах убираемой поверхности, полученных сенсорной системой 120. Например, сенсорная система 120 может определять ровность убираемой поверхности, ее материал, наличие масла и пыли и другую информацию и передавать ее в систему управления 130 автоматического уборочного оборудования. Соответственно, система управления 130 может давать команду автоматическому уборочному оборудованию автоматически и динамически регулировать частоту вращения двигателя и передаточное число устройства передачи мощности в соответствии с рабочей средой оборудования, тем самым регулируя заданный цикл возвратно-поступательного движения чистящей головки 410.
[00119] Например, если автоматическое уборочное оборудование работает на ровной поверхности, заданный цикл возвратно-поступательного движения можно автоматически и динамически удлинять, количество воды в насосе можно автоматически и динамически уменьшать; если автоматическое уборочное оборудование работает на неровной поверхности, заданный цикл возвратно-поступательного движения можно автоматически и динамически уменьшать, в объем воды в насосе можно автоматически и динамически увеличивать. Это связано с тем, что ровный пол легче чистить, чем неровный, поэтому для очистки неровного пола возвратно-поступательное движение чистящей головки 410 должно быть более быстрым (то есть более частым), и воды требуется больше.
[00120] Например, если автоматическое уборочное оборудование работает на столе, заданный цикл возвратно-поступательного движения можно автоматически и динамически удлинить, количество воды в насосе можно автоматически и динамически уменьшить; если автоматическое уборочное оборудование 100 работает на полу, заданный цикл возвратно-поступательного движения можно автоматически и динамически уменьшить, в объем воды в насосе можно автоматически и динамически увеличить. Это связано с тем, что по сравнению с полом на рабочем столе меньше пыли и жира, и материал, из которого изготовлен рабочий стол, легче чистить; поэтому чистящей головке 410 требуется меньше циклов возвратно-поступательного движения и меньше воды в насосе для очистки рабочего стола.
[00121] Опорная платформа 422 содержит очищающую подложку 4221, которая может свободно двигаться на опорной платформе 422, по сути, очищающая подложка 4221 совершает возвратно-поступательное движение под действием вибрационного элемента 4213. Как вариант, очищающая подложка 4221 включает в себя входную канавку (не показана на рисунке) в месте контакта с вибрационным элементом 4213; когда опорная платформа 422 соединяется с приводной платформой 421, вибрационный элемент 4213 входит в канавку, так что очищающая подложка 4221 может совершать возвратно-поступательное движение синхронно с вибрационным элементом 4213.
[00122] На фиг. 12 показан другой приводной механизм 800 чистящей головки, основанный на кривошипно-ползунном механизме в соответствии с множеством вариантов реализации этой заявки. Приводной механизм 800 может применяться на приводной платформе 421. Приводной механизм 800 включает в себя приводное колесо 4212, вибрационный элемент 4213, очищающую подложку 4221, направляющую 4222 (первая направляющая) и направляющую 4223 (вторая направляющая).
[00123] Направляющие 4222 и 4223 начинаются на опорной платформе 422. Оба конца очищающей подложки 4221 чистящей головки включают в себя ползун 525 (первый ползун) и ползун 528 (второй ползун). Ползуны 525 и 528 представляют собой выступы на обоих концах очищающей подложки 4221. Ползун 525 входит в направляющую 4222 и может скользить по ней; ползун 4223 входит в направляющую 4223 и может скользить по ней. В некоторых вариантах реализации направляющая 4222 находится на одной прямой линии с направляющей 4223. В некоторых вариантах реализации, направляющие 4222 и 4223 не находятся на одной прямой линии. В некоторых вариантах реализации направляющая 4222 направлена в ту же сторону, что и направляющая 4223. В некоторых вариантах реализации направление выдвижения направляющей 4222 и 4223 совпадает с направлением выдвижения очищающей подложки 4221. В некоторых вариантах реализации направление выдвижения направляющей 4222 и 4223 отличается от направления выдвижения очищающей подложки 4221. В некоторых вариантах реализации направление выдвижения направляющих 4222 и 4223 различается. Например, как показано на фиг. 12, направление выдвижения направляющей 4222 совпадает с направлением выдвижения очищающей подложки 4221, а направление выдвижения направляющей 4223 находится под определенным углом к направлению выдвижения направляющей 4222.
[00124] Вибрационный элемент 4213 включает в себя поворотный конец 512 и скользящий конец 514. Поворотный конец 512 соединяется с приводным колесом 4212 через первую ось 516, а скользящий конец 514 соединяется с очищающей подложкой 4221 через вторую ось 518.
[00125] Центром вращения ведущего колеса 4212 является точка О, а центром вращения первой оси 516 является точка А. Точка О и точка А не перекрываются, и расстояние между ними равно заданному расстоянию D.
[00126] Когда ведущее колесо 4212 вращается, точка А вслед за ним совершает круговое вращательное движение. Соответственно, поворотный конец 512 вслед за точкой А совершает круговое вращательное движение; скользящий конец 514 приводит очищающую подложку 4221 в скользящее движение через вторую ось 518. Соответственно, ползун 525 очищающей подложки 4221 совершает возвратно-поступательное линейное движение вдоль направляющей 4222; ползун 528 совершает возвратно-поступательное линейное движение вдоль направляющей 4223. На фиг. 4 скорость движения подвижной платформы 210 составляет V0, а направление движения является целевым направлением. Согласно некоторым вариантам реализации, когда направляющие 4223 и 4222 почти перпендикулярны направлению скорости движения V0 подвижной платформы 210, общее смещение очищающей подложки 4221 по существу перпендикулярно целевому направлению. Согласно другим вариантам реализации, когда любая из направляющих 4223 и 4222 находится под углом, отличным от 90 градусов, к целевому направлению, общее смещение очищающей подложки 4221 включает в себя оба компонента - перпендикулярный и параллельный целевому направлению.
[00127] Кроме того, они включают в себя виброизолирующее устройство 4215, расположенное на соединительной штанге 4214, для уменьшения вибрации в определенном направлении; в данном варианте реализации оно используется для уменьшения вибрации в направлении компонента движения, перпендикулярного целевому направлению автоматического уборочного оборудования.
[00128] На фиг. 13 показан другой приводной механизм 600 чистящей головки, основанный на двухкривошипном механизме, в соответствии со множеством вариантов реализации этой заявки. Приводной механизм 600 может применяться на приводной платформе 421. Приводной механизм 600 включает в себя приводное колесо 4212 (первое приводное колесо), приводное колесо 4212' (второе приводное колесо) и очищающую подложку 4221.
[00129] Очищающая подложка 4221 имеет два конца. Первый конец соединяется с приводным колесом 4212 через ось 624 (первая ось); второй конец соединяется с приводным колесом 4212' через ось 626 (вторая ось). Центром вращения приводного колеса 4212 является точка О, а центром вращения оси 624 является точка А. Точка О и точка А не перекрываются, и расстояние между ними равно заданному расстоянию D. Центром вращения приводного колеса 236 является точка О', а центром вращения оси 626 является точка А'. Точки О' и А' не перекрываются, а расстояние между ними равно заданному расстоянию D. В некоторых вариантах реализации точки А, А', О и О' расположены в одной плоскости. Таким образом, приводное колесо 4212, приводное колесо 4212' и очищающая подложка 4221 могут образовывать двухкривошипный механизм (или параллелограммный механизм), в котором очищающая подложка 4221 действует как соединительная тяга, а приводные колеса 4212 и 4212' действуют как два кривошипа.
[00130] Кроме того, они включают в себя виброизолирующее устройство 4215, расположенное на соединительной штанге 4214, для уменьшения вибрации в определенном направлении; в данном варианте реализации оно используется для уменьшения вибрации в направлении компонента движения, перпендикулярного целевому направлению автоматического уборочного оборудования.
[00131] На фиг. 14 показан приводной механизм 700 на основе кривошипно-ползунного механизма в соответствии с множеством вариантов реализации. Приводной механизм 700 может применяться на приводной платформе 421. Приводной механизм 700 включает в себя приводное колесо 4212, очищающую подложку 4221 и направляющую 4222. [00132] Направляющая 4222 начинается на опорной платформе 422. Очищающая подложка 4221 включает в себя поворотный конец 4227 и скользящий конец 4226. Поворотный конец 4227 соединяется с приводным колесом 4212 посредством оси 4228. При этом центром вращения приводного колеса 4212 является точка О, а центром вращения оси 4228 поворотного конца является точка А. Точка О и точка А не перекрываются, и расстояние между ними равно заданному расстоянию D. Скользящий конец 4226 включает в себя ползун 4225. Ползун 4225 представляет собой выступ на скользящем конце 4226. Ползун 4225 входит в направляющую 4222 и может скользить по ней. Таким образом, приводное колесо 4221, очищающая подложка 4221 и ползун 4225 с направляющей 4222 образуют кривошипно-ползунный механизм.
[00133] Когда приводное колесо 4212 вращается, точка А совершает круговое вращательное движение. Соответственно, поворотный конец 4227 очищающей подложки 4221 следует за точкой А, совершая круговое вращательное движение; ползун 4225 скользит по направляющей 4222, совершая возвратно-поступательное линейное движение. В результате этого очищающая подложка 4221 начинает совершать возвратно-поступательные движения. Согласно некоторым вариантам реализации, направляющая 4222 почти перпендикулярна целевому направлению скорости движения подвижной платформы; таким образом, линейное перемещение скользящего конца 4226 включает в себя компонент движения, перпендикулярный целевому направлению, а круговое вращательное движение поворотного конца 4227 включает в себя оба компонента движения - перпендикулярный и параллельный целевому направлению.
[00134] На фиг. 14 скорость движения подвижной платформы равна V0, а направление движения является целевым направлением; направляющая 4222 почти перпендикулярна целевому направлению. При этом возвратно-поступательное движение очищающей подложки 4221 в целом имеет как компонент движения, параллельный целевому направлению автоматического уборочного оборудования, так и компонент движения, перпендикулярный целевому направлению автоматического уборочного оборудования.
[00135] Кроме того, они включают в себя виброизолирующее устройство 4215, расположенное на соединительной штанге 4214, для уменьшения вибрации в определенном направлении; в данном варианте реализации оно используется для уменьшения вибрации в направлении компонента движения, перпендикулярного целевому направлению автоматического уборочного оборудования.
[00136] Кроме того, опорная платформа 422 также включает в себя эластичную кнопку 4229 для снятия, расположенную, по меньшей мере, на одной стороне опорной платформы 422, для обеспечения разъемного соединения опорной платформы 422 с захватом 4216 на приводной платформе 421. По меньшей мере одна область входа 4224, расположенная на опорной платформе 422, предназначенная для входа чистящей головки 410. Область входа 4224 может быть выполнена из связующего материала со связующим слоем.
[00137] Как показано на фиг. 9, чистящая головка 410 содержит активную область 412, соединенную с очищающей подложкой 4221, и совершает возвратно-поступательное движение вдоль очищаемой поверхности под действием очищающей подложки 4221. Активная область 412 расположена приблизительно в центральной части чистящей головки 410.
[00138] На одной стороне подвижной области 412, соединенной с очищающей подложкой 4221, имеется связующий слой, через который подвижная область 412 соединяется очищающей подложкой 4221.
[00139] Как вариант, чистящая головка 410 также включает в себя неподвижную область 411, которая соединяется с нижней частью опорной платформы 422 через по меньшей мере одну область входа 4224, и неподвижная область 411 очищает по меньшей мере часть рабочей поверхности, двигаясь вместе с опорной платформой 422.
[00140] Кроме того, чистящая головка 410 также включает в себя гибкий соединительный элемент 413, расположенный между неподвижной областью 411 и подвижной областью 412, предназначенный для соединения неподвижной области 411 и подвижной области 412. Чистящая головка 410 дополнительно содержит скользящий зажим 414, который выдвигается вдоль края чистящей головки 410 и посредством разъемного соединения встает в установленное положение защелкивания 4225 на опорной платформе 422.
[00141] Как показано на фиг. 9, чистящая головка 410 может быть изготовлена из определенного эластичного материала и крепиться к поверхности опорной платформы 422 через связующий слой, тем самым обеспечивая возвратно-поступательное движение. При работе чистящая головка 410 всегда касается очищаемой поверхности.
[00142] Механизм подачи воды включает водовыпускное устройство 4217, которое может быть прямо или опосредованно соединено с отверстием для выпуска очищающей жидкости в емкости для воды (не показано на схеме), то есть с выпускным отверстием резервуара для чистой воды, при этом очищающая жидкость может через отверстие для очищающей жидкости выпускаться из емкости для воды в водовыпускное устройство 4217 и через него равномерно наноситься на очищаемую поверхность. Водовыпускное устройство может быть снабжено соединительным элементом (не показано на рисунке) и соединяться с отверстием для выпуска очищающей жидкости из емкости для воды через соединительный элемент. Водовыпускное устройство снабжено распределительным отверстием, которое может представлять собой одно сплошное отверстие или комбинацию нескольких раздельных небольших отверстий, в распределительном отверстии может быть предусмотрено несколько форсунок. Очищающая жидкость поступает через выпускное отверстие для очищающей жидкости в емкости для воды и соединительный элемент водовыпускного устройства к распределительному отверстию и равномерно наносится на рабочую поверхность.
[00143] Механизм подачи воды может также включать в себя насос для чистой воды 4219 и/или трубку для насоса чистой воды 4218; насос для чистой воды 4219 может соединяться с отверстием для выпуска очищающей жидкости в емкости для воды непосредственно или через трубку 4218 насоса для чистой воды.
[00144] Насос 4219 для чистой воды может соединяться с соединительным элементом водовыпускного устройства и забирать очищающую жидкость из емкости для воды в водовыпускное устройство. Насос для чистой воды может быть шестеренчатым насосом, лопастным насосом, плунжерным насосом, перистальтическим и другим насосом.
[00145] Механизм подачи воды забирает очищающую жидкость из емкости для чистой воды через насос 4219 для чистой воды и трубку 4218 насоса для чистой воды и транспортирует ее к водовыпускному устройству, водовыпускным устройством 4217 может быть насадка, распылительное отверстие, ткань для пропитывания и т.д., благодаря чему вода равномерно распределяется по чистящей головке, смачивая ее и очищаемую поверхность. После смачивания загрязнения на очищаемой поверхности удаляются легче. В модуле влажной уборки 400 можно регулировать мощность/расход водяного насоса.
[00146] В модуле влажной уборки после появления приводного блока и зоны вибрации чистящая головка может совершать возвратно-поступательное движение, многократно очищая рабочую поверхность, так что, двигаясь по траектории, робот-уборщик может многократно очищать определенную область за один раз, что значительно увеличивает эффектность уборки, особенно сильно загрязненных участков, обеспечивая очевидный результат уборки.
[00147] В конкретном варианте реализации настоящее изобретение представляет автоматическое уборочное оборудование с подъемником, которое включает в себя подвижную платформу 100, предназначенную для автоматического перемещения по рабочей поверхности; модуль влажной уборки 400, который подвижно соединяется с подвижной платформой 100 посредством четырехзвенного подъемного механизма 500 и предназначен для уборки по меньшей мере части рабочей поверхности влажным способом; при этом четырехзвенный подъемный механизм 500 представляет собой параллелограммный механизм, предназначенный для перевода модуля влажной уборки 400 из поднятого в опущенное состояние; в поднятом состоянии модуль влажной уборки 400 удален от рабочей поверхности, как показано на фиг. 15; в опущенном состоянии модуль влажной уборки 400 прижат к рабочей поверхности, как показано на фиг. 16.
[00148] Как показано на фиг. 17-18, четырехзвенный подъемный механизм 500 содержит: первый соединительный конец 501, который обеспечивает главную движущую силу для перевода модуля влажной уборки 400 между состоянием подъема и опускания; второй соединительный конец 502, расположенный напротив первого соединительного конца 501 и вращающийся под действием главной движущей силы. Первый соединительный конец 501 и второй соединительный конец 502 расположены с обеих сторон модуля влажной уборки 400, который поднимается или опускается под действием силы подъема и опускания.
[00149] В частности, первый соединительный конец 501 включает в себя первый держатель 5011, который неподвижно соединен с нижней частью подвижной платформы 100; первый держатель 5011 имеет примерно П-образную форму и включает в себя поперечную балку 50111, первую продольную балку 50114 и вторую продольную балку 50115, конечные части которых прикреплены болтами неподвижной крепятся к подвижной платформе 100 и модулю влажной уборки 400, обеспечивая модулю влажной уборки 400 удерживающее усилие при подъеме и опускании.
[00150] Первый соединительный конец 501 также включает в себя первую пару 5012 соединительных штанг, один конец первой пары 5012 соединительных штанг соединен с возможностью вращения с первым держателем 5011, а другой конец соединен с возможностью вращения с модулем влажной уборки 400. Первая пара 5012 соединительных штанг может иметь полую конструкцию, способную уменьшить общий вес подъемного конца.
[00151] Как вариант, первая пара 5012 соединительных штанг включает в себя первую соединительную штангу 50121 и вторую соединительную штангу 50122, расположенные параллельно, первый конец первой соединительной штанги 50121 и второй соединительной штанги 50122 соединены с возможностью вращения с первой продольной балкой 50114 через подвижную шпильку, второй конец первой соединительной штанги 50122 и второй соединительной штанги 50122 соединен с возможностью вращения с модулем влажной уборки 400 посредством подвижной шпильки. Например, на двух концах первой соединительной штанги 50121 и второй соединительной штанги 50122 соответственно могут быть сквозные отверстиям диаметром больше диаметра подвижной шпильки, чтобы подвижная шпилька могла свободно вращаться в этих сквозных отверстиях и при этом неподвижно соединяться с первой продольной балкой 50114, проходя сквозь эти сквозные отверстия. Когда двигатель 50131 создает натяжение второго конца с помощью троса, первый конец первой соединительной штанги 50121 и второй соединительной штанги 50122 одновременно вращаются вокруг подвижной шпильки на первом конце, а второй конец поднимается под действием натяжения троса, поднимая модуль влажной уборки 400. Когда двигатель 4211 убирает натяжение второго конца с помощью троса, первый конец первой соединительной штанги 50121 и второй соединительной штанги 50122 одновременно вращаются в обратном направлении вокруг подвижной шпильки на первом конце, а второй конец опускается под действием силы тяжести, опуская модуль влажной уборки 400.
[00152] Первый соединительный конец 501 дополнительно включает силовой блок 5013, который обеспечивает подъемную силу, в результате чего первая пара 5012 соединительных штанг поворачивается в пределах заданного угла. Силовой узел 5013 включает в себя двигатель 50131, который обеспечивает движение в прямом и обратном направлении; трос 50132, один конец которого подсоединен к двигателю 50131, например, соединение с навивкой с зубчатой шестерней, подсоединенной к выходному валу двигателя, для телескопического движения при вращении двигателя. Другой конец троса подсоединен ко второму концу первой соединительной штанги 50121 и второй соединительной штанги 50122, двигатель 50131 с помощью троса 50132 заставляет второй конец первой соединительной штанги 50121 и второй соединительной штанги 50122 подниматься или опускаться.
[00153] Как вариант, первый держатель 5011 дополнительно имеет желоб 50112, проходящий вдоль поверхности поперечной балки 50111, и сквозное отверстие 50113, проходящее через поперечную балку 50111, расположенное на конце, куда идет желоб 50112; трос 50132 через желоб 50112 и отверстие 50113 подсоединен ко второму концу первой соединительной штанги 50121 и второй соединительной штанги 50122, желоб 50112 может ограничивать направление перемещения троса и обеспечивает стабильность подъема и опускания модуля; ширина желоба 50112 определяется толщиной троса.
[00154] Как показано на фиг. 17, второй соединительный конец 502 содержит второй держатель 5021, неподвижно соединенный с нижней частью подвижной платформы 100; вторую пару соединительных штанг 5022, один конец которой соединен с возможностью вращения со вторым держателем 5021, другой конец соединен с возможностью вращения с модулем влажной уборки 400; вторая пара соединительных штанг 5022 вращается вместе с вращением первой пары соединительных штанг 5012. Вторая пара 5022 соединительных штанг может иметь полую конструкцию, которая уменьшает общий вес подъемного конца.
[00155] В частности, вторая пара 5022 соединительных штанг включает в себя третью соединительную штангу 50221 и четвертую соединительную штангу 50222, расположенные параллельно друг другу; первый конец третьей соединительной штанги 50221 и четвертой соединительной штанги 50222 соединены с возможностью вращения со вторым держателем 5021 с помощью подвижной шпильки; второй конец третьей соединительной штанги 50222 и четвертой соединительной штанги 50222 соединен с возможностью вращения с модулем влажной уборки 400 посредством подвижной шпильки. Например, на двух концах третьей соединительной штанги 50221 и четвертой соединительной штанги 50222 соответственно могут быть сквозные отверстиям диаметром больше диаметра подвижной шпильки, чтобы подвижная шпилька могла свободно вращаться в этих сквозных отверстиях и при этом неподвижно соединяться со вторым держателем 5021, проходя сквозь эти сквозные отверстия. Когда первый соединительный конец 501 вращается под действием двигателя 50131, первый конец третьей соединительной штанги 50221 и четвертой соединительной штанги 50222 одновременно вращается вокруг подвижной шпильки на первом конце, а второй конец третьей соединительной штанги 50221 и четвертой соединительной штанги 50222 одновременно вращается вокруг подвижной шпильки на втором конце, поднимая вверх модуль влажной уборки 400. Когда натяжение первого соединительного конца 501 ослабляется, третья соединительная штанга 50221 и четвертая соединительная штанга 50222 одновременно вращаются в обратном направлении вокруг подвижной шпильки, опускаясь под действием силы тяжести и опуская модуль влажной уборки 400.
[00156] Благодаря четырехзвенному подъемному механизму, расположенной между модулем влажной уборки и подвижной платформой, модуль влажной уборки может подниматься и опускаться относительно подвижной платформы; при выполнении задачи по уборке модуль влажной уборки опускается, соприкасаясь с поверхностью; когда модуль влажной уборки завершает уборку, он поднимается, удаляясь от поверхности, предотвращая увеличение силы сопротивления из-за уборочного модуля, когда уборочное оборудование свободно перемещается по очищаемой поверхности.
[00157] С помощью датчиков поверхности и других датчиков, которые могут определять тип очищаемой поверхности, модуль подъемника может очищать модуль влажной уборки в зависимости от очищаемой поверхности, например, поднимать модуль влажной уборки на поверхность ковра и опускать модуль влажной уборки на поверхность пола/напольной плитки, чтобы добиться более комплексного эффекта очистки.
[00158] С развитием существующие роботы-подметальщики превратились в роботов-уборщиков с функциями сухой и влажной уборки. Робот-уборщик 2000, показанный на фиг. 1, оснащен одновременно модулем сухой уборки 151 и модулем влажной уборки 400; во время уборки модуль сухой уборки 151 расположен спереди по направлению движения для подметания пола; модуль влажной уборки 400 расположен сзади и предназначен для мытья полов после того, как их пометет модуль сухой уборки 151. Однако обычно модуль влажной уборки 400 не используется для чистки ковров.
[00159] На практике, чтобы модуль влажной уборки 400 не намочил ковер, на роботе-уборщике 2000 обычно предусмотрен механизм подъема модуля влажной уборки. Таким образом, когда датчик 103 типа поверхности на роботе-уборщике 2000 распознает ковер, модуль влажной уборки поднимается таким образом, что, когда робот-уборщик 2000 проходит по ковру, модуль влажной уборки не касался ковра. Когда обнаруживается, что робот-уборщик ушел с ковра, модуль влажной уборки 400 снова опускается, чтобы протирать пол.
[00160] Однако из-за ограничения по высоте робота-уборщика 2000 диапазон подъема и опускания модуля влажной уборки 400 очень ограничен, обычно всего около 1 мм. Если это длинноворсные ковры, циновки, одежды и т.д., то даже если поднятие модуля влажной уборки 400 вряд ли позволит полностью избежать их намокания, вплоть до того, что робот-уборщик 2000 может застрять и не сможет двигаться.
[00161] Исходя из этого, в варианте реализации настоящего изобретения представлен способ обхода препятствий роботом-уборщиком, который используется в случае, когда робот-уборщик после уборки область вдоль стены застревает из-за ковра. Эта ситуация показана на фиг. 19-24.
[00162] Как показано на фиг. 19, когда робот-уборщик 2000 убирает область вдоль стены без ковра или в углах довольно далеко от ковра, он может с помощью бокового датчика расстояния определять расстояние до стены и постоянно сохранять его, постоянно перемещаясь вдоль края стены, с помощью расположенных спереди боковых щеток 157 сметать пыль со стороны стен в свою основную щетку, а также при необходимости протирать полы с помощью модуля влажной уборки 400. После того, как робот-уборщик 2000 выполнит уборку зоны вдоль стены, он автоматически разворачивается и продолжает уборку, как показано на фиг. 19.
[00163] Однако, когда робот-уборщик 2000 поворачивает после уборки вдоль стены и обнаруживает ковер 301, то возникает ситуация, когда между ковром 301 и стеной 302 имеется узкий зазор 303, показанный на фиг. 20. Когда робот-уборщик 2000 входит в зазор 303, так как датчик 103 типа поверхности расположен с одной стороны боковой щетки 157, он не может обнаружить ковер 301 и не срабатывает. После столкновения с препятствиями или завершения уборки вдоль стены, когда робот-уборщик 2000 поворачивается и возвращается, срабатывает датчик 103 типа поверхности; если ширины зазора 303 недостаточно для поворота робота-уборщика 2000, он застревает внутри и не может двигаться, вызывая проблемы для пользователя.
[00164] Кроме того, как показано на фиг. 21, перед тем, как робот-уборщик 2000 начнет уборку вдоль края ковра, если ковер обнаружен, робот-уборщик 2000 повернется на определенный угол, например, как показано на фиг. 22, на 15 градусов против часовой стрелки. Затем робот-уборщик 2000 пройдет вперед на короткое расстояние этом направлении; затем он снова повернется обратно на тот же угол и продолжит движение в направлении поворота назад, одновременно определяя, есть ли ковер. Если ковер все еще обнаруживается, нужно продолжить поворот на определенный угол и повторить описанный выше процесс до тех пор, пока ковер не перестанет обнаруживаться, прежде чем включится режим уборки вдоль края ковра, как показано на фиг. 23.
[00165] На практике конкретное направление и угол поворота, а также расстояние движения вперед могут устанавливаться в зависимости от реальной ситуации, в данном варианте реализации ограничений нет.
[00166] После того, как робот-уборщик 2000 уберет зону вдоль края ковра, например, как показано на фиг. 24, после того, как робот-уборщик 2000 уберет зону вдоль края первого ковра 401, он изменит направление, но в процессе изменения направления может обнаружит другой ковер, то есть второй ковер 402, показанный на фиг. 24. Если зазор между первым ковром 401 и вторым ковром 402 узкий, когда робот-уборщик 2000 входит в зазор, поскольку устройство 103 распознавания ковра расположено со стороны, где находится первый ковер 401, устройство 103 распознавания ковра не может обнаружить второй ковер 402 и не срабатывает. После завершения уборки вдоль края первого ковра 401, когда робот-уборщик 2000 поворачивается и возвращается, срабатывает устройство 103 распознавания ковра; если ширины зазора недостаточно для поворота робота-уборщика 2000, он застрянет внутри и не сможет выйти, создав проблемы пользователю.
[00167] С учетом вышеописанной ситуации, на фиг. 25 показана технологическая схема способа обхода препятствий роботом-уборщиком, предусмотренного вариантом реализации настоящего изобретения, способ обхода препятствий роботом-уборщиком может включать в себя следующие шаги:
[00168] На шаге S2610, когда робот-уборщик во время уборки вдоль края области с первым типом поверхности сталкивается с препятствиями и поворачивает, в ответ на сигнал датчика типа поверхности об изменении типа поверхности он обнаруживает область со вторым типом поверхности и выполняет поиск по уже созданной карте помещения, чтобы определить, имеется ли на ней область со вторым типом поверхности;
[00169] На шаге S2620, если область со вторым типом поверхности имеется на карте помещения, на основе границы области со вторым типом поверхности на карте помещения и по самой карте помещения определяется путь обхода области со вторым типом поверхности; если такой путь обхода существует, робот-уборщик перемещается по нему с целью обхода области со вторым типом поверхности;
[00170] На шаге S2630, если такого пути нет, робот-уборщик возвращается по уже убранному маршруту, чтобы попробовать обойти область со вторым типом поверхности.
[00171] Вариант реализации настоящего изобретения обеспечивает способ обхода препятствий роботом-уборщиком; когда робот-уборщик сталкивается с препятствием во время уборки вдоль края области с первым типом поверхности, такой как стена, и собирается развернуться, чтобы продолжить уборку пола, датчик типа поверхности срабатывает и обнаруживает изменение типа поверхности, тем самым определив область с другим типов поверхности, например, ковер. В это время сперва можно выполнить поиск по предварительно установленной карте помещения, чтобы определить, существует ли на карте помещения область со вторым типом поверхности; если область существует на карте помещения, определяется, существует ли путь обхода этой области, основываясь на границе области на карте помещения и на самой карте помещения, чтобы помочь роботу-уборщику обойти препятствие. Другими словами, если имеется путь обхода области со вторым типом поверхности, робот-уборщик перемещается по этому пути так, чтобы обойти ковер и выйти из зазора между стеной и ковром. Однако, если такого пути в обход области со вторым типом поверхности нет, робот-уборщик возвращается по маршруту уже выполненной уборки, чтобы избежать попадания на ковер.
[00172] Способ обхода препятствий роботом-уборщиком, предусмотренный вариантом реализации настоящего изобретения, обеспечивает способ обхода препятствия, когда робот-уборщик завершил уборку узкого участка и выполнил поворот, предотвращая застревание робота-уборщика, повышает способность робота-уборщика автоматически обходить препятствия, снижает частоту отказов робота-уборщика и тем самым улучшает пользовательский опыт.
[00173] Следует отметить, что вышеупомянутый способ обхода препятствий подходит для робота-уборщика, который не находится в режиме чистки ковра или при включенном модуле влажной уборки; в этих двух режимах робот-уборщик не может попасть на ковер, то есть находится в режиме уборки только поверхности первого типа. Таким образом, при обнаружении того, что робот-уборщик застрял из-за ковра, способ обхода препятствий, предусмотренный в варианте реализации настоящего изобретения, позволяет роботу-уборщику обойти препятствие, не попадая на ковер, уменьшая вероятность того, что робот-уборщик застрянет из-за ковра.
[00174] Кроме того, здесь поверхностью первого типа является деревянные полы, ковры, керамическая плитка, цементные полы или их комбинация; к поверхности второго типа относится поверхность, отличная от поверхности первого типа, это могут быть деревянные полы, ковры, керамическая плитка, цементные полы или их комбинация;
[00175] В варианте реализации настоящего изобретения, после того как робот-уборщик поворачивается после уборки вдоль края области первого типа поверхности и обнаруживает область второго типа поверхности, также необходимо использовать другие датчики для проверки того, не попала ли какая-либо часть робота-уборщика в область второго типа поверхности; если результат проверки по-прежнему показывает, что какая-либо часть робота-уборщика попала в область поверхности второго типа, робот-уборщик должен повернуть назад, чтобы сразу покинуть область поверхности второго типа и избежать ее намокания или повреждения робота-уборщика.
[00176] Здесь, направляя робота-уборщика в обратном направлении, можно быстро и точно отвести его от области поверхности второго типа, чтобы он не начал разворот на этой области и не застрял.
[00177] На практике по фактическому положению робота-уборщика можно определить, не попал ли робот-уборщик в области поверхности второго типа. В варианте реализации настоящего изобретения путем определения того, находится ли датчик типа поверхности робота-уборщика уже в области второго типа поверхности, можно определить, не попала ли какая-либо часть робота-уборщика в эту область; и если датчик типа поверхности уже находится в области второго типа поверхности, можно считать, что по меньшей мере часть робота-уборщика уже в области второго типа поверхности; в это время необходимо отвести робота-уборщика от области второго типа поверхности задним ходом.
[00178] Сегодня чаще всего используются такие датчики типа поверхности, как устройства распознавания с инфракрасными датчиками, устройства распознавания с ультразвуковыми датчиками, устройства определения тока основной щетки и т.д.; устройства распознавания с различными датчиками могут использовать разные методы определения того, находится ли датчик типа поверхности робота-уборщика уже в области второго типа поверхности. В данном варианте реализации в качестве примера используется устройство распознавания с ультразвуковым датчиком, чтобы проиллюстрировать, как определяется, находится ли датчик типа поверхности уже в области с другим типом поверхности:
[00179] На практике устройства распознавания с ультразвуковым датчиком передает на поверхность ультразвуковой сигнал и принимает отраженные от поверхности эхо-сигналы. Между формой волны ультразвукового эхо-сигнала обычной поверхности и формой волны ультразвукового эхо-сигнала поверхности второго типа имеется разница, как показано на фиг. 26 и 27. Следовательно, разные эхо-сигналы позволяют отличать поверхность первого типа от поверхности второго типа. Область поверхности второго типа относится к поверхности пола с другим типом напольного покрытия. Среди них для различения сигнала может использоваться форма волны и количество пиков эхо-сигнала.
[00180] В варианте реализации настоящего изобретения определение того, находится ли датчик типа поверхности робота-уборщика уже в области второго типа поверхности, включает в себя следующее: датчик типа поверхности передает ультразвуковой сигнал вертикально к текущей поверхности и принимает отраженный от нее фактический эхо-сигнал, по которому определяется, отличается ли фактический эхо-сигнал от эхо-сигнала поверхности первого типа, и если есть разница, считается, что датчик типа поверхности уже находится в области поверхности второго типа.
[00181] На практике, после того как ультразвуковой датчик получит электрический сигнал, он преобразует его в ультразвуковой и передает его вниз на поверхность; ультразвуковой сигнал отражается поверхностью, принимается ультразвуковым датчиком и преобразуется в электрический сигнал. Конкретное определение разницы между фактическим эхо-сигналом и эхо-сигналом поверхности первого типа может включать в себя следующее: определяется, меньше ли количество пиков в фактическом эхо-сигнале, чем в эхо-сигнале поверхности первого типа, и если количество пиков в фактическом эхо-сигнале меньше, чем в эхо-сигнале поверхности первого типа, считается, что текущая поверхность является поверхностью второго типа. В частности, для разных областей фактический эхо-сигнал может сравниваться отдельно с эхо-сигналом поверхности первого типа, соответствующей текущей области, это повышает точность распознавания области поверхности второго типа.
[00182] В этом варианте реализации эхо-сигнал области с первым типом поверхности является критерием для определения эхо-сигнала поверхности второго типа, что уменьшает сложность распознавания области второго типа поверхности и повышает точность робота-уборщика в идентификации области поверхности второго типа.
[00183] В данном варианте реализации настоящего изобретения, когда робот-уборщик возвращается по маршруту уже выполненной уборки, он должен двигаться задним ходом и отходить как можно дальше от области с поверхностью второго типа; если робот-уборщик отошел назад, но его датчик типа поверхности все еще находится в области второго типа поверхности, робот-уборщик поворачивается на месте до тех пор, пока не будет определено, что он покинул область с поверхностью второго типа, после чего он продолжает поворот на месте, чтобы направление его движения было параллельно краю области с первым типом поверхности, после чего робот-уборщик возвращается в этом направлении.
[00184] Если робот-уборщик, двигаясь задним ходом, упирается в препятствие и не может завершить процесс движения задним ходом, но при этом он покинул область со вторым типом поверхности, он поворачивается непосредственно на месте таким образом, чтобы направление его движения было параллельно краю области с поверхностью первого типа, и возвращается в этом направлении.
[00185] В процессе возврата робот-уборщик может возвращаться как вперед передней стороной, так и вперед задней стороной. При возвращении вперед передней стороной робот-уборщик разворачивается на 180 градусов на маршрут уже выполненной уборки и перемещается по нему; при возвращении вперед задней стороной робот-уборщик движется по маршруту уже выполненной уборки задним ходом. В данном варианте реализации, чтобы робот-уборщик не сделал ошибку распознавания и не подал сигнал тревоги, используется способ возврата задней стороной вперед, который обеспечит быстрое возвращение робота-уборщика в исходное положение. Исходным положением здесь может быть положение, из которого робот-уборщик начинает уборку вдоль стены, и в этом вариант реализации не содержит ограничений.
[00186] При этом определение того, находится ли робот-уборщик вне области с поверхностью второго типа, аналогично определению того, находится ли датчик типа поверхности робота-уборщика уже в области с поверхностью второго типа; когда фактический эхо-сигнал совпадает с эхо-сигналом поверхности первого типа, считается, что робот-уборщик покинул область с поверхностью второго типа. Здесь это не будет повторяться.
[00187] В данном варианте реализации настоящего изобретения, если определено, что область с поверхностью второго типа отсутствует на карте помещения, можно включить уборки вдоль края области с поверхностью второго типа, чтобы просканировать край этой области и сохранить результаты сканирования на карте помещения для использования в следующий раз.
[00188] Согласно карте помещения, записанной роботом-уборщиком, можно определить, что после того, как робот-уборщик при повороте обнаружит область с поверхностью второго типа, определяется, проходит ли маршрут уже выполненной уборки вдоль стены; если да, робот-уборщик возвращается по траектории вдоль стены.
[00189] В данном варианте реализации настоящего изобретения на основе карты помещения определяется, находится ли область с поверхностью второго типа за роботом-уборщиком; если да, робот-уборщик возвращается по маршруту уже выполненной уборки. [00190] В данном варианте реализации настоящего изобретения возврат робота-уборщика по траектории вдоль стены или по маршруту уже выполненной уборки отвод робота-уборщика назад по траектории вдоль стены или по маршруту уже выполненной уборки; когда расстояние отхода достигает заданного значения, выполняется поворачивается на месте так, чтобы по возможности обойти область с поверхностью второго типа и избежать застревания.
[00191] На практике, когда расстояние отхода назад достигает заданного значения, робот-уборщик поворачивается на месте; если во время такого поворота в ответ на сигнал изменения типа поверхности от датчика типа поверхности обнаруживается область с поверхностью второго типа, это означает, что робот-уборщик еще не покинул область с поверхностью второго типа, то есть он еще не обошел препятствие; в этом случае робот-уборщик продолжает отходить назад до тех пор, пока датчик типа поверхности не сможет обнаружить сигнал изменения типа поверхности, только после этого можно считать, что робот-уборщик обошел препятствие.
[00192] В данном варианте реализации настоящего изобретения заданное расстояние отхода назад может составлять по меньшей мере половину длины корпуса робота; как правило, после отхода на половину длины корпуса можно гарантировать, что робот-уборщик в процессе поворота выйдет из предыдущего диапазона обнаружения. На практике заданное расстояние также может быть другим, превышающим половину длины корпуса, в этом варианте реализации нет специальных требований.
[00193] На практике угол поворота робота-уборщика на месте также может составлять от 15 до 90 градусов или увеличиваться по нарастающей, то есть, если робот-уборщик поворачивается на месте на 15 градусов, не обнаруживая область с поверхностью второго типа, он может повернуться еще на 15 или на другой градус, до тех пор, пока при повороте на 90 градусов все еще не обнаружит сигнал изменения типа поверхности, и только тогда будет считаться, что робот-уборщик обошел область с поверхностью второго типа.
[00194] На практике обычно возникают ситуации, когда в роботе-уборщике нет карты текущего помещения, например, когда робот-уборщик попадает в новое помещение или когда он не создал карту помещения; в этом случае роботу-уборщику трудно заранее определить путь для обхода области с поверхностью второго типа. В этом случае способ обхода препятствия роботом-уборщиком, предусмотренный вариантом реализации настоящего изобретения, позволяет роботу-уборщику поворачивать и возвращаться по траектории уже выполненной уборки, игнорируя сигнал изменения типа поверхности от датчика типа поверхности, чтобы достичь цели обхода препятствия.
[00195] В данном варианте реализации настоящего изобретения, когда робот-уборщик в направлении поворота обнаруживает область с поверхностью второго типа, он может непосредственно определить, существует ли путь для обхода этой области, чтобы избежать застревания. При этом для поиска пути в обход области с поверхностью второго типа может использоваться установленная карта помещения, чтобы определить, существует ли на ней область с поверхностью второго типа. Если на карте помещения имеется область с поверхностью второго типа, можно по границе области с поверхностью второго типа, присутствующей на карте помещения, и по самой карте помещения определить, существует ли путь в обход области с поверхностью второго типа, чтобы помочь роботу-уборщику избежать застревания. Другими словами, если путь в обход области с поверхностью второго типа существует, робот-уборщик перемещается по этому пути, избегая области с поверхностью второго типа, и работая в обычном режиме уборки.
[00196] Однако, если область с поверхностью второго типа на вышеупомянутой карте помещения отсутствует, робот может запустить режим сканирования границ для сканирования краев области с поверхностью второго типа, и сохранить информацию о краях этой области на карте помещения, чтобы использовать эту информация для справки при следующей уборке.
[00197] В данном варианте реализации настоящего изобретения в процессе возврата робота-уборщика по траектории уже выполненной уборки может постоянно отслеживаться сигнал изменения типа поверхности от датчика типа поверхности, чтобы определить, не исчез ли сигнал изменения типа поверхности от датчика; если сигнал от датчика исчез, датчик типа поверхности больше не посылает сигнал изменения типа поверхности, что означает, что робот-уборщик уже покинул область с поверхностью второго типа. В этом случае робот-уборщик продолжает двигаться вперед на заданное расстояние, а после прохождения заданного расстояния останавливается и делает на месте поворот на один оборот, чтобы определить, покинул ли он область с поверхностью второго типа.
[00198] В данном варианте реализации настоящего изобретения, если датчик типа поверхности по время поворота робота-уборщика на один оборот подает сигнал изменения типа поверхности, это означает, что робот-уборщик столкнулся с областью с поверхностью нового типа, или что робот-уборщик еще не полностью покинул область с поверхностью второго типа; в этом случае он продолжает возвращаться по траектории уже выполненной уборки для достижения цели обхода препятствия.
[00199] Однако, если во время поворота робота датчик типа поверхности не подает сигнал изменения типа поверхности, это означает, что робот-уборщик покинул область с поверхностью второго типа, и ему не препятствует область с новым типом поверхности; в этом случае робот-уборщик переходит в обычный режим уборки и продолжает уборку области с поверхностью первого типа.
[00200] На практике робот-уборщик также имеет другие функции, которые помогают реализовать все действия, в данном варианте реализации они повторяться не будут.[00201] Следует отметить, что вышеуказанный способ используется не только для роботов-уборщиков с устройствами сухой уборки и модулями влажной уборки, но также для роботов-подметальщиков только с устройствами сухой уборки или роботов-полотеров только с модулями влажной уборки, а также для других интеллектуальных роботов с автономными ходовыми механизмами, которым требуется распознавание формы поверхности; данный вариант реализации настоящего изобретения не имеет здесь ограничений.
[00202] Следует отметить, что, хотя в чертежах в определенном порядке разные этапы реализации данного изобретения, это не требует и не подразумевает, что эти этапы должны выполняться именно в таком порядке или что для достижения желаемого результата должны быть выполнены все показанные этапы. Как дополнение или вариант, определенные шаги могут быть опущены, несколько шагов могут быть объединены в один шаг для выполнения и/или один шаг может быть разложен на несколько шагов и т.д.
[00203] В вариантах реализации настоящего изобретения также предусмотрено устройство для обхода препятствий роботом-уборщиком, которое расположено в роботе-уборщике, включающем датчик типа поверхности, как показано на фиг. 28, устройство 2900 обхода препятствий роботом-уборщиком может включать в себя модуль определения типа поверхности 2901, первый модуль управления 2902 и второй модуль управления 2903, где:
[00204] Модуль определения типа поверхности 2901 используется, когда робот-уборщик во время уборки вдоль края области с первым типом поверхности сталкивается с препятствиями и поворачивает, в ответ на сигнал об изменении типа поверхности от датчика типа поверхности он обнаруживает область со вторым типом поверхности и выполняет поиск по уже созданной карте помещения, чтобы определить, имеется ли на ней область со вторым типом поверхности;
[00205] Первый модуль управления 2902 используется для поиска пути обхода области со вторым типом поверхности, когда по границе области со вторым типом поверхности на карте помещения и по самой карте помещения определяется, что эта область со вторым типом поверхности имеется на карте помещения; если такой путь обхода существует, робот-уборщик перемещается по нему с целью обхода области со вторым типом поверхности;
[00206] Второй модуль управления 2903 используется для того, чтобы робот-уборщик возвращался по маршруту уже выполненной уборки, если такого пути не существует, чтобы обойти область со вторым типом поверхности.
[00207] Конкретные детали каждого модуля устройства для обхода препятствий роботом-уборщиком, приведенные выше, уже подробно описаны в соответствующем разделе способа обхода препятствий роботом-уборщиком, поэтому здесь они повторяться не будут.
[00208] Следует отметить, что, хотя в приведенном выше подробном описании упоминаются несколько модулей или блоков оборудования, используемого для выполнения разных операций, это разделение не является обязательным. Фактически, согласно варианту реализации настоящего изобретения, характеристики и функции двух или более модулей или блоков, описанных выше, могут быть воплощены в одном модуле или блоке. И наоборот, характеристики и функции одного модуля или блока, описанные выше, могут быть дальше при воплощении поделены между множеством модулей или блоков.
[00209] В варианте реализации настоящего изобретения также предусмотрено электронное оборудование для выполнения описанных выше задач. Технические специалисты в данной технической области смогут понять, что все аспекты этого изобретения могут быть реализованы в виде систем, способов или программ. Поэтому разные аспекты настоящего изобретения могут быть конкретно реализованы в следующих формах, а именно: полное аппаратное воплощение, полное программное воплощение (включая встроенное ПО, микрокод и т.д.) или комбинацию аппаратного и программного воплощений, которые здесь могут совместно именоваться "схема", "модуль" или "система".
[00210] Описание электронного оборудования 3000 в соответствии с этим вариантом реализации настоящего изобретения показано на фиг. 29. Электронное оборудование 3000, показанное на фиг. 29, является лишь примером и не должно налагать никаких ограничений на функции и сферу применения варианта реализации данного изобретения.
[00211] Как показано на фиг. 29, электронное оборудование 3000 представлено в виде универсального вычислительного устройства. Компоненты электронного оборудования 3000 могут включать в себя, без ограничений, по меньшей мере, один процессор 3010, по меньшей мере, один модуль памяти 3020, шину 3030, соединяющую различные компоненты системы (включая модуль памяти 3020 и процессор 3010), и блок отображения 3040.
[00212] При этом модуль памяти 3020 предназначен для хранения программного кода, который может выполняться блоком процессора 3010, так что блок процессора 3010 выполняет этапы, описанные в примерах реализации настоящего изобретения, в соответствии с различными вариантами реализации настоящего изобретения. Например, блок процессора 3010 может выполнять шаг S2610, показанный на фиг. 25, когда робот-уборщик во время уборки вдоль края области с поверхностью первого типа сталкивается с препятствиями и меняет направление, в ответ на сигнал изменения типа поверхности от датчика типа поверхности обнаруживается область с поверхностью второго типа и выполняется поиск по установленной карте помещения, чтобы определить, существует ли на ней область с поверхностью второго типа; шаг S2620, если область с поверхностью второго типа существует на карте помещения, то в соответствии с границей этой области на карте и самой картой определяется, существует ли путь в обход области с поверхностью второго типа; если такой путь существует, робот-уборщик движется по нему, чтобы обойти область с поверхностью второго типа; шаг S2630, если такой путь не существует, робот-уборщик возвращается по пути уже выполненной уборки, чтобы покинуть область с поверхностью второго типа.
[00213] Модуль памяти 3020 может включать в себя считываемый носитель в виде энергозависимого блока памяти, такого как запоминающее устройство с произвольным доступом (ЗУПД) 30201 и/или блок кэширования 30202, и может дополнительно включать в себя постоянное запоминающее устройство (ПЗУ) 30203.
[00214] Модуль памяти 3020 может также включать в себя программу/служебную программу 30204, имеющую набор (по меньшей мере, один) программных модулей 30205, такие программные модули 30205 включают в себя, без ограничений, операционную систему, одно или более приложений, другие программные модули и программные данные, каждый из которых или их комбинация в этих вариантах реализации может включать в себя реализацию сетевой среды.
[00215] Шина 3030 может быть шиной со структурой одного или нескольких типов, включая шину модуля памяти или контроллер запоминающего устройства, периферийную шину, ускоренный графический порт, процессор или локальную шину, которая использует любую из множества структур шин.
[00216] Электронное оборудование 3000 может также взаимодействовать с одним или несколькими внешними устройствами 3070 (такими как клавиатуры, сенсорные устройства, устройства Bluetooth и т.д.), а также с одним или несколькими устройствами связи, которые позволяют пользователю взаимодействовать с электронным устройством 3000, и/или с любым устройством, которое позволяет электронному устройству 3000 взаимодействовать с одним или несколькими другими вычислительными устройствами (такими как маршрутизаторы, модемы и т.д.). Эта связь может осуществляться через интерфейс ввода-вывода (I/O) 3050. Более того, электронное оборудование 3000 может также осуществлять связь с одной или несколькими сетями (такими как локальная сеть (LAN), глобальная сеть (WAN) и/или сеть общего пользования, такая как Интернет) через сетевой адаптер 3060. Как показано на рисунке, сетевой адаптер 3060 взаимодействует с другими модулями электронного оборудования 3000 через шину 3030. Следует понимать, что, хотя это и не показано на рисунке, с электронным оборудованием 3000 могут использоваться и другие аппаратные и/или программные модули, включая, без ограничений, микрокод, драйверы устройств, резервные процессоры, массивы внешних дисков, RAID-системы, ленточные накопители и системы резервного хранения данных.
[00217] На основе описания приведенного выше варианта реализации техническому персоналу в данной области техники легко понять, что описанный здесь вариант может быть реализован с помощью программного обеспечения или комбинации программного обеспечения и необходимого аппаратного обеспечения. Таким образом, техническое решение согласно вариантам реализации настоящего изобретения может быть воплощено в виде программного обеспечения, которое может храниться на энергонезависимом носителе информации (которым может быть CD-ROM, диск USB, мобильный жесткий диск и т.д.) или в сети, включая ряд набор команд, позволяющих вычислительному устройству (которое может быть персональным компьютером, сервером, оконечным устройством, сетевым устройством и т.д.) выполнять задачи, описанные в варианте реализации данного изобретения.
[00218] В варианте реализации настоящего изобретения также предусмотрен машиночитаемый носитель информации, на котором хранится программа, предназначенная для выполнения описанных здесь задач. В некоторых возможных вариантах реализации различные аспекты настоящего изобретения также могут быть реализованы в виде программы, которая включает программный код, когда программа запущена на оконечном устройстве, программный код позволяет оконечному устройству выполнять шаги, описанные в "варианте реализации" настоящего описания в соответствии с различными вариантами реализации настоящего изобретения.
[00219] Как показано на фиг. 30, программа 3100, используемая для реализации вышеуказанных задач согласно вариантам реализации изобретения, может храниться на портативном постоянном ЗУ на компакт-диске (CD-ROM) и включать программный код, и может быть запущен на оконечном устройстве, таком как персональный компьютер. Однако программа в данном изобретении здесь не ограничивается; в этой заявке читаемым носителем информации может быть любой материальный носитель, на котором содержится или хранится программа, которая может использоваться системой, устройством или компонентом для выполнения команд в сочетании с ними.
[00220] Программа может храниться на одном читаемом носителе или на любой комбинации нескольких носителей. Считываемый носитель может быть считываемым носителем сигнала или считываемым носителем информации. Например, считываемый носитель информации может представлять собой, без ограничений, электрическую, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, устройство или компонент, или любую их комбинацию. Более конкретные примеры считываемых носителей информации (неполный список) включают: электрические соединения с помощью одного или нескольких проводов, портативные диски, жесткие диски, запоминающее устройство с произвольным доступом (ЗУПД), постоянное ЗУ (ПЗУ), стираемое ПЗУ (EPROM или флэш-память), оптические диски, портативное ПЗУ на компакт-диске (CD-ROM), оптические и магнитные запоминающие устройства или любая подходящая их комбинация.
[00221] Машиночитаемый носитель сигнала может включать в себя сигнал, распространяемый в основной полосе частот или как часть несущей частоты, которая несет считываемый программный код. Этот распространяемый сигнал может иметь множество форм, включая, без ограничений, электромагнитные сигналы, оптические сигналы или любую подходящую их комбинацию. Считываемый носитель сигнала также может быть любым считываемым носителем, отличным от считываемого носителя информации, который может передавать, распространять или отправлять программы, используемые системой, устройством или компонентом для выполнения команд или их комбинацией.
[00222] Программный код, содержащийся на считываемом носителе, может передаваться с помощью любого подходящего носителя, включая, без ограничений, беспроводной, проводной, оптический, радиочастотный кабель и т.д. или любую подходящую их комбинацию.
[00223] Написать программный код для выполнения операций в данном изобретении можно на любой комбинации одного или нескольких языков программирования, включая объектно-ориентированные языки программирования, такие как Java, С++ и т.д., а также обычные процедурные языки программирования, такие как язык "С" или аналогичные языки программирования. Программный код может быть полностью выполнен на вычислительном устройстве пользователя, частично выполнен на устройстве пользователя, выполнен как независимый программный пакет, частично выполнен на вычислительном устройстве пользователя, а частично на удаленном вычислительном устройстве или полностью выполнен на удаленном вычислительном устройстве или сервере. В случае удаленного вычислительного оборудования оно может быть подключено к вычислительному оборудованию пользователя через любой вид сети, включая локальную сеть (LAN) или глобальную сеть (WAN), или может быть подключено к внешнему вычислительному устройству (например, с помощью интернет-провайдера при подключении через интернет).
[00224] Кроме того, приведенные выше чертежи предназначены лишь для схематического описания процессов, включенных в задачи, предусмотренные вариантом реализации настоящего изобретения, и не предназначены для ограничения изобретения. Легко понять, что процессы, показанные на приведенных выше чертежах, не выражают и не ограничивают хронологический порядок этих операций. Кроме того, легко понять, что эти процессы могут выполняться синхронно или асинхронно, например, в нескольких модулях.
[00225] Рассмотрев описание и применив на практике описанное здесь изобретение, технические специалисты в данной области смогут легко придумать другие варианты реализации настоящего изобретения. Данная заявка охватывает любые вариации, виды использования или адаптации настоящего изобретения; эти вариации, виды использования или адаптации соответствуют общим принципам действия настоящего изобретения и включают хорошо известные в данной области техники или привычные технические средства. Описание и варианты реализации считаются лишь иллюстративными, а подлинная область применения и дух этого изобретения указаны в формуле изобретения.
[00226] Следует понимать, что настоящее изобретение не ограничивается точной структурой, описанной выше и показанной на чертежах, и включает в себя различные модификации и видоизменения, не выходящие за рамки его применения. Объем настоящего изобретения ограничен только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое уборочное оборудование | 2021 |
|
RU2820188C1 |
| Автоматическое уборочное оборудование | 2024 |
|
RU2841299C2 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833538C2 |
| БАЗОВАЯ СТАНЦИЯ И СИСТЕМА РОБОТА-УБОРЩИКА | 2021 |
|
RU2833996C2 |
| РОБОТ-УБОРЩИК И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2019 |
|
RU2800503C1 |
| Базовая станция, роботизированная система чистки и способ ее управления | 2020 |
|
RU2785339C1 |
| Способ и устройство для управления очисткой уборочных компонентов уборочного оборудования и машиночитаемый носитель информации | 2021 |
|
RU2830248C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ, БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ | 2019 |
|
RU2777408C1 |
| Уборочное оборудование и способы обнаружения загрязнений | 2021 |
|
RU2831217C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2005 |
|
RU2293647C1 |
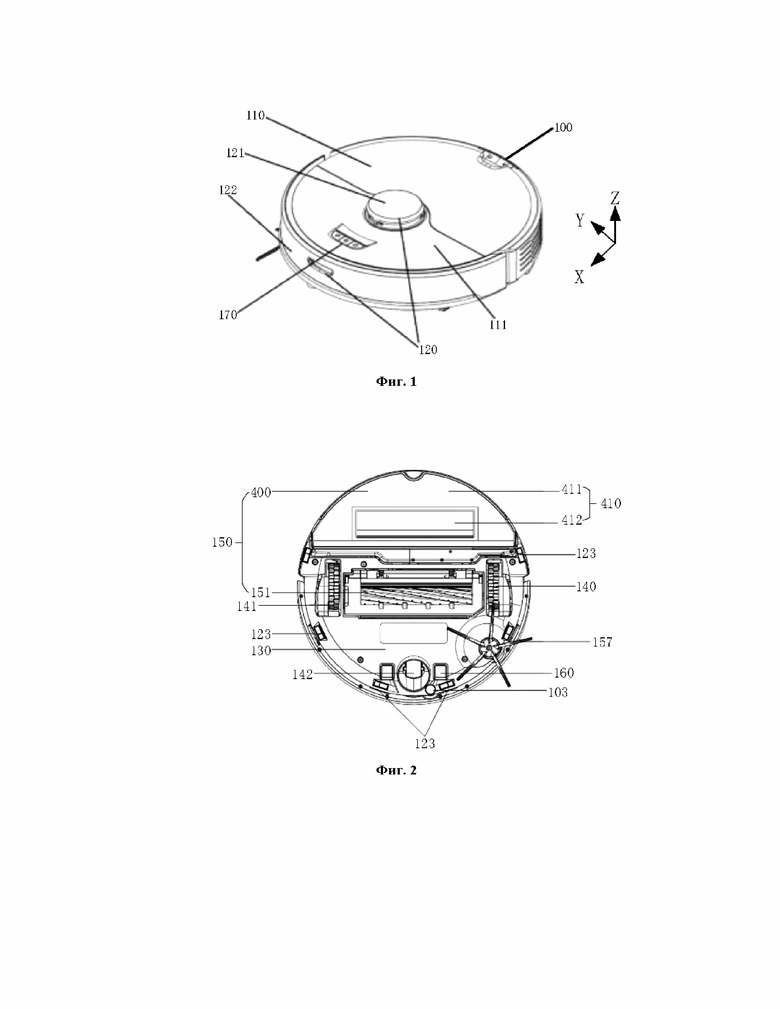
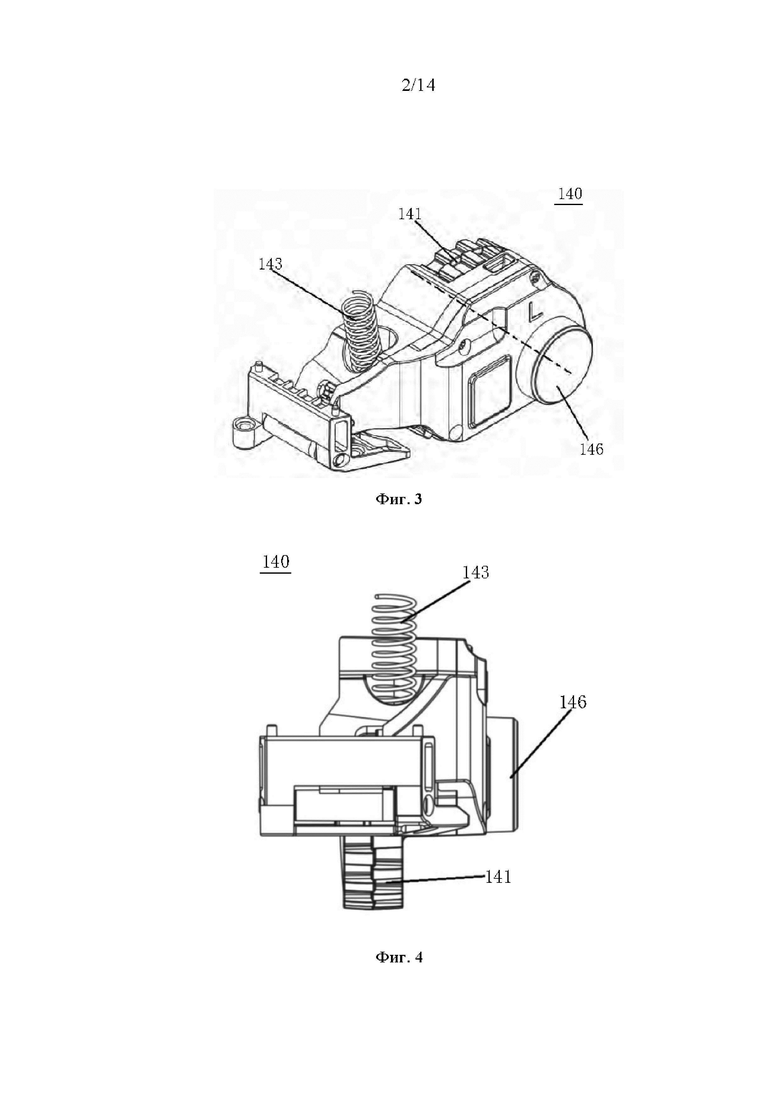
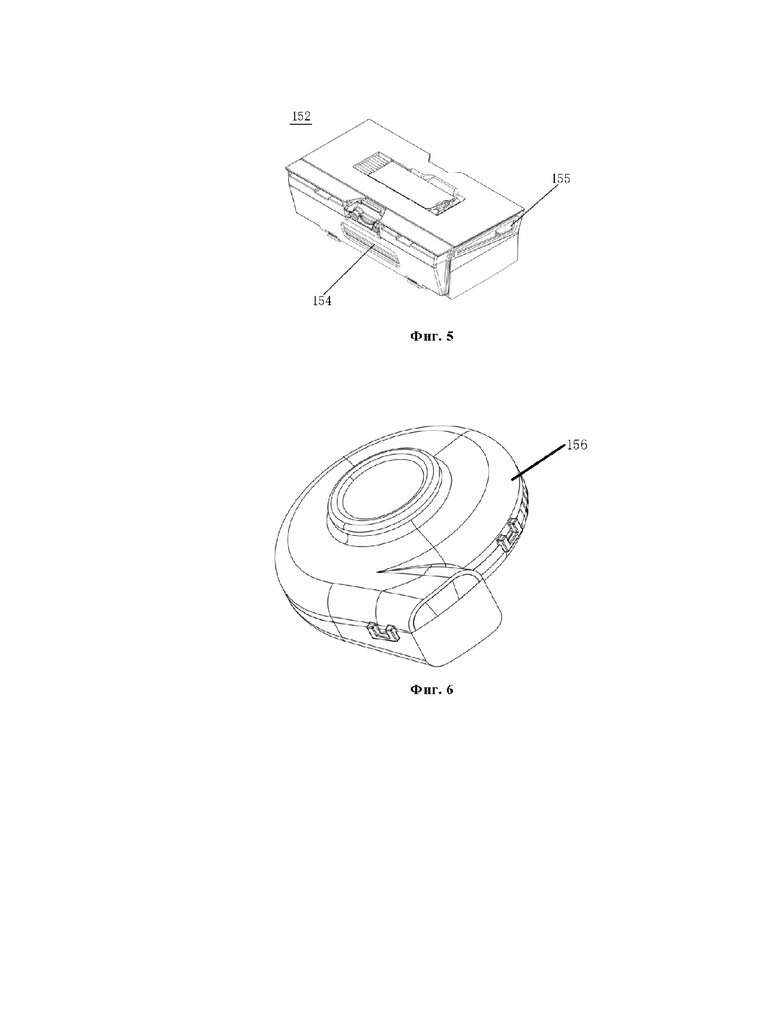
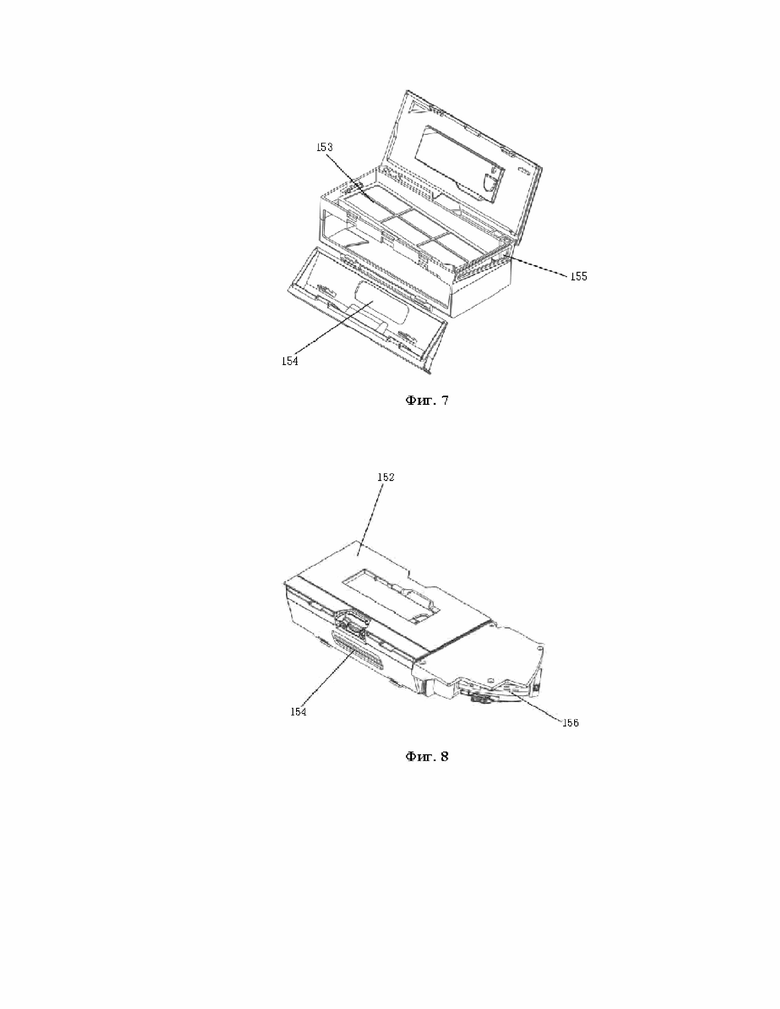
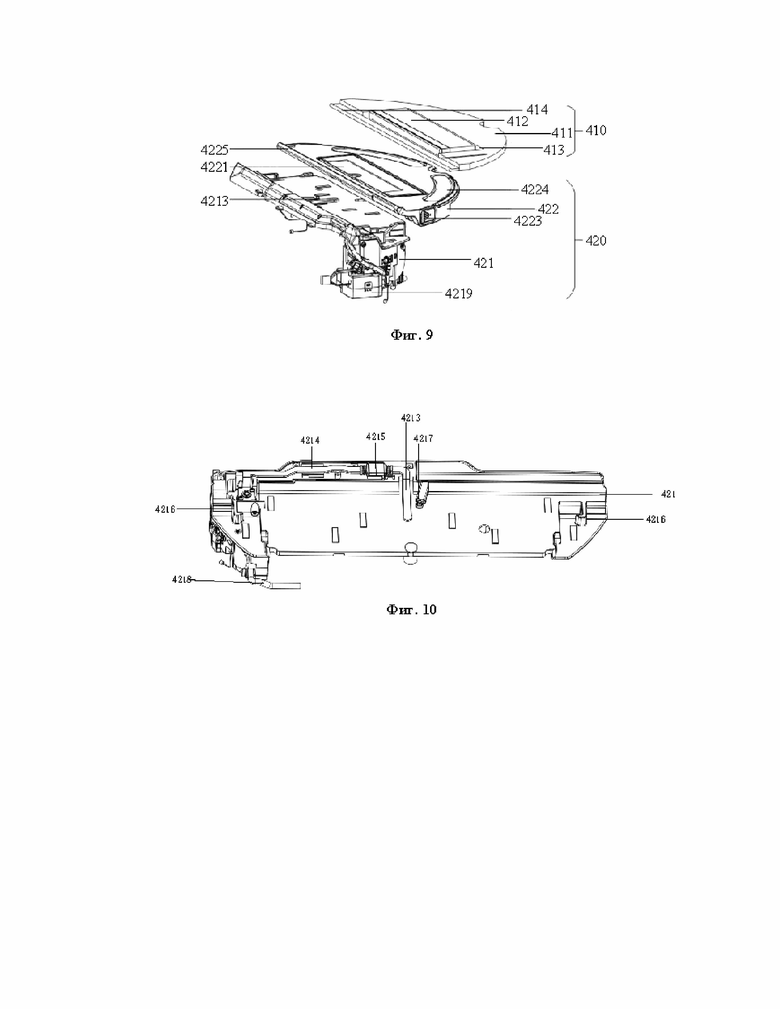
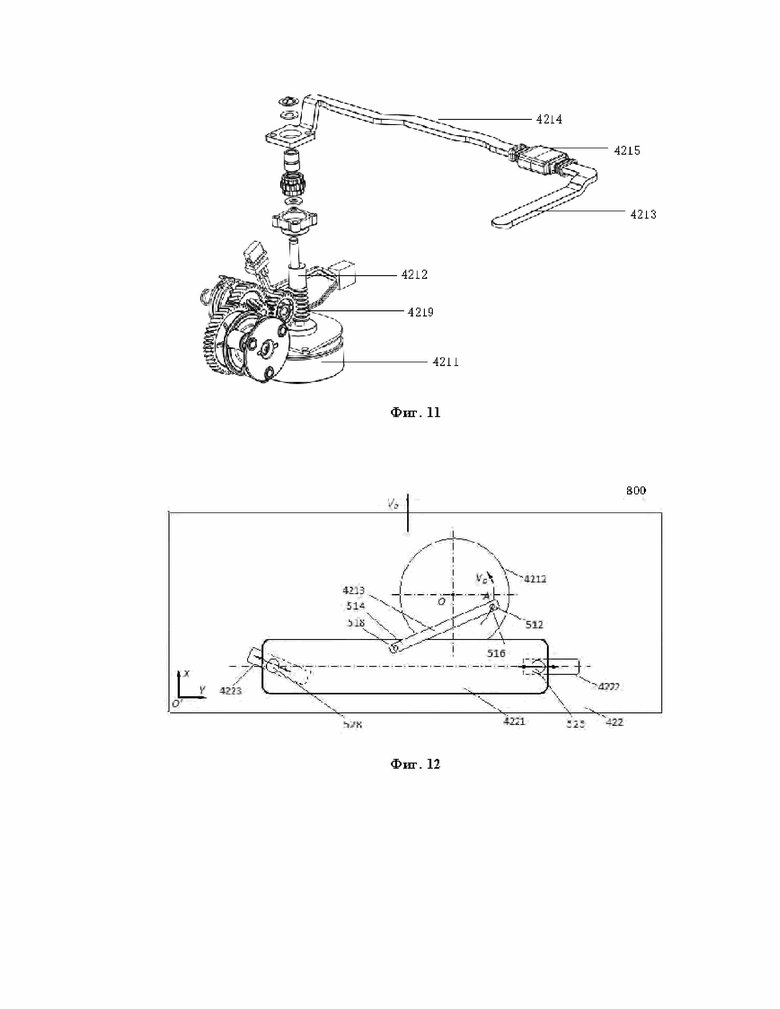
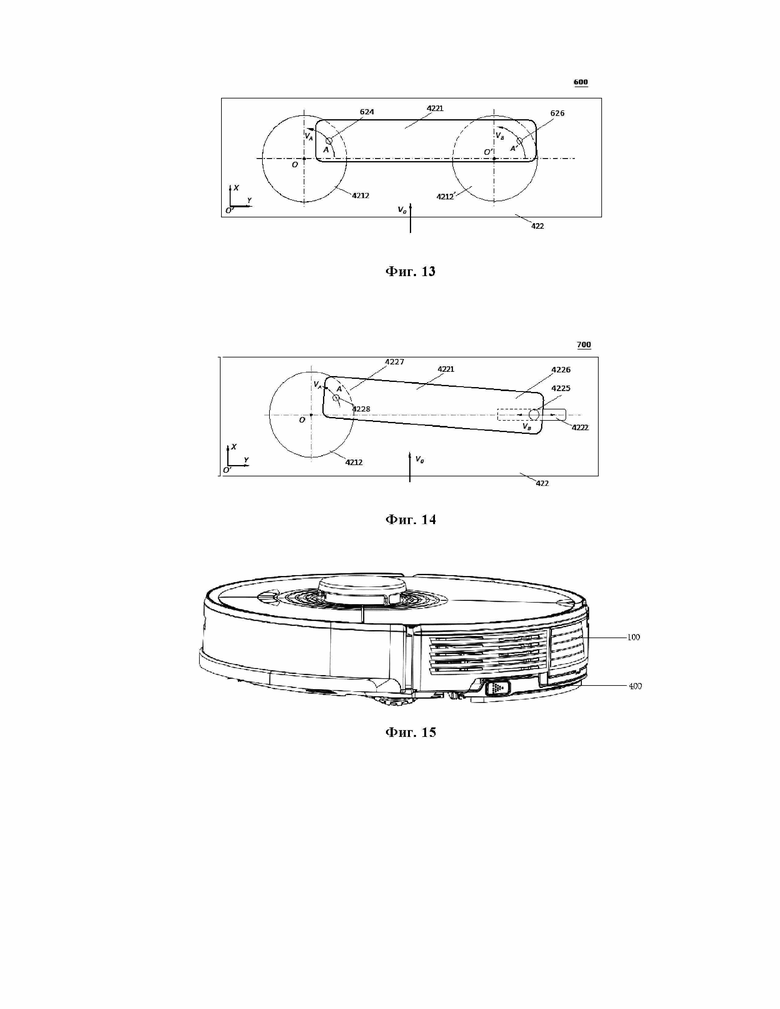
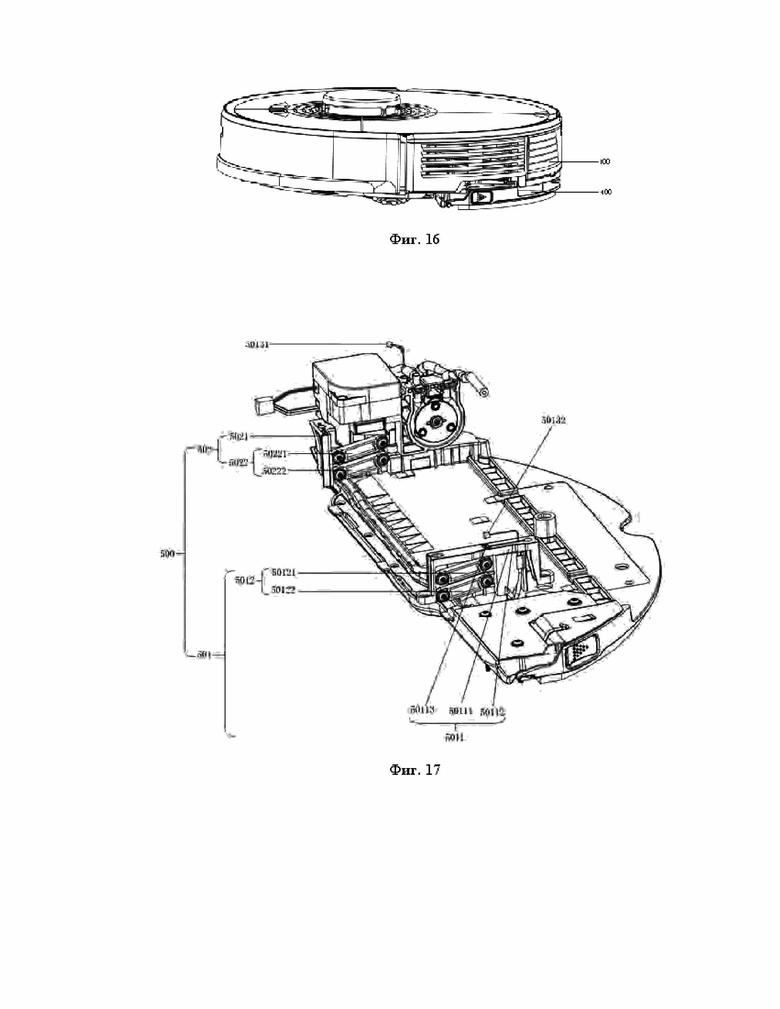
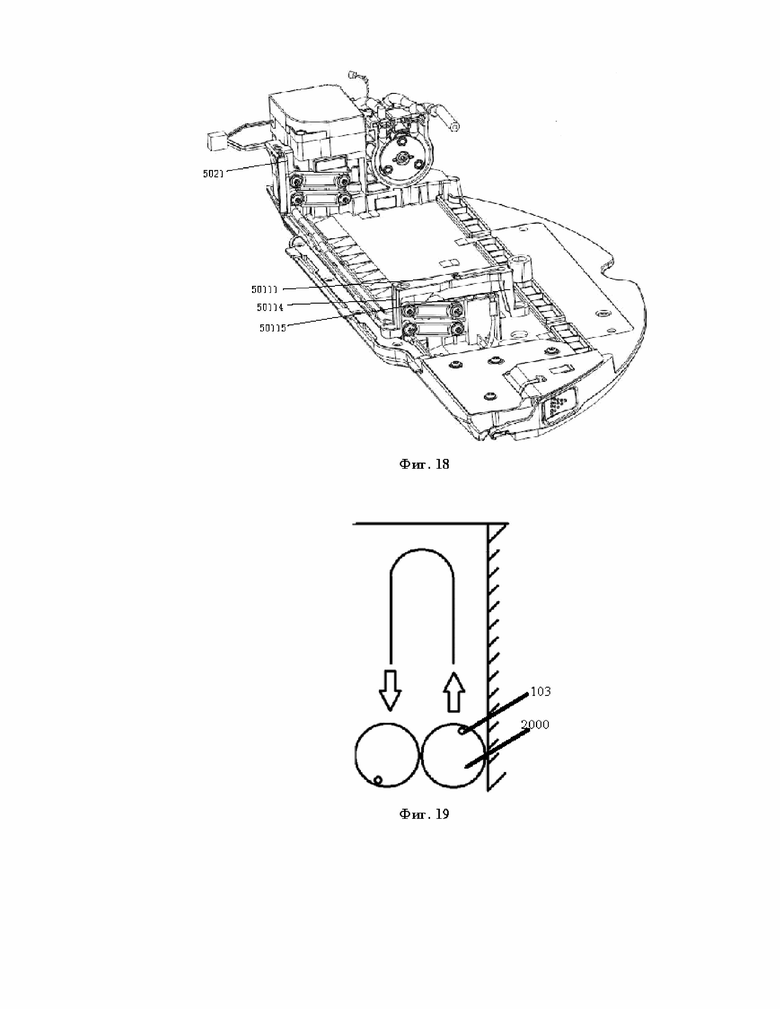
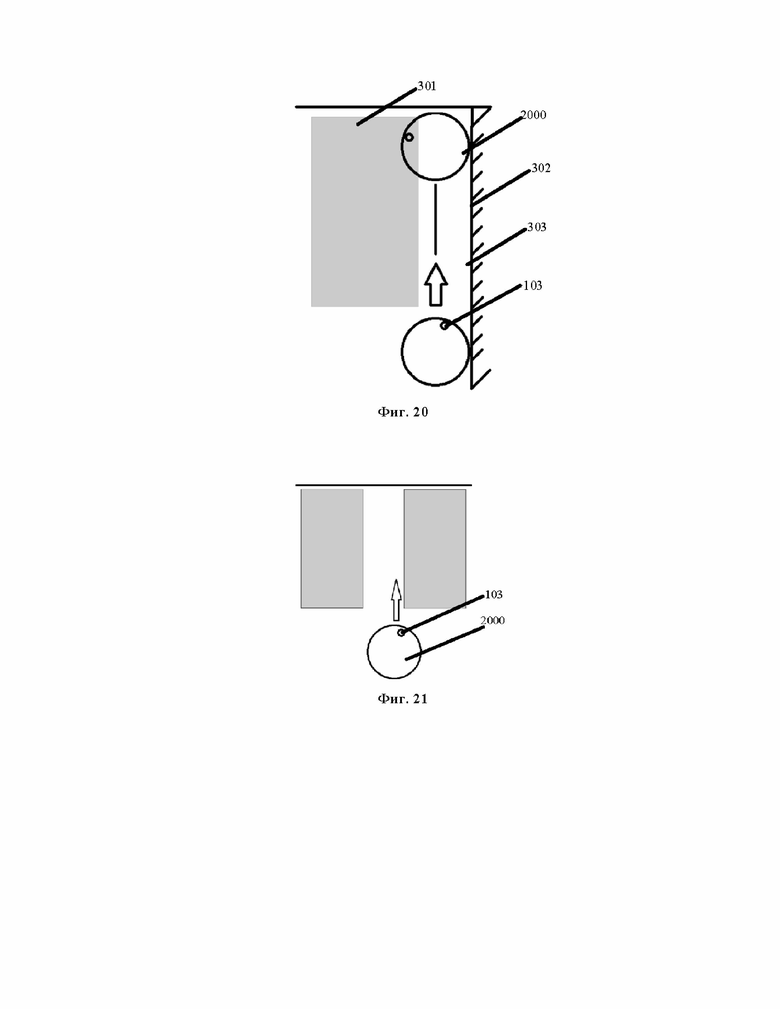
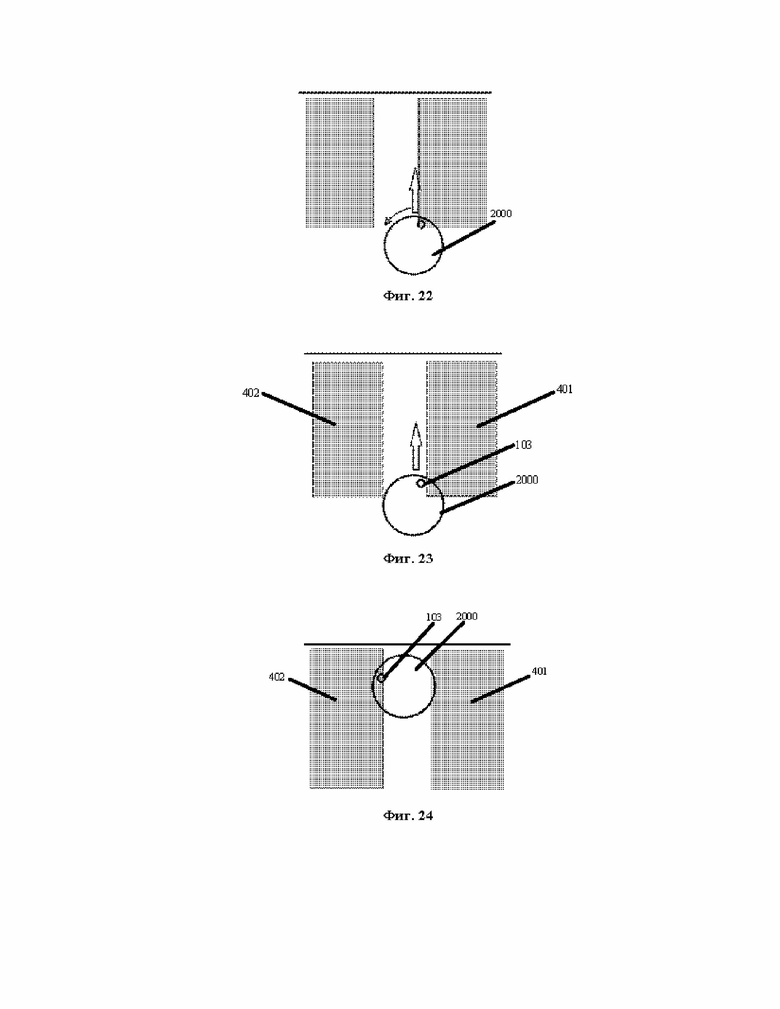
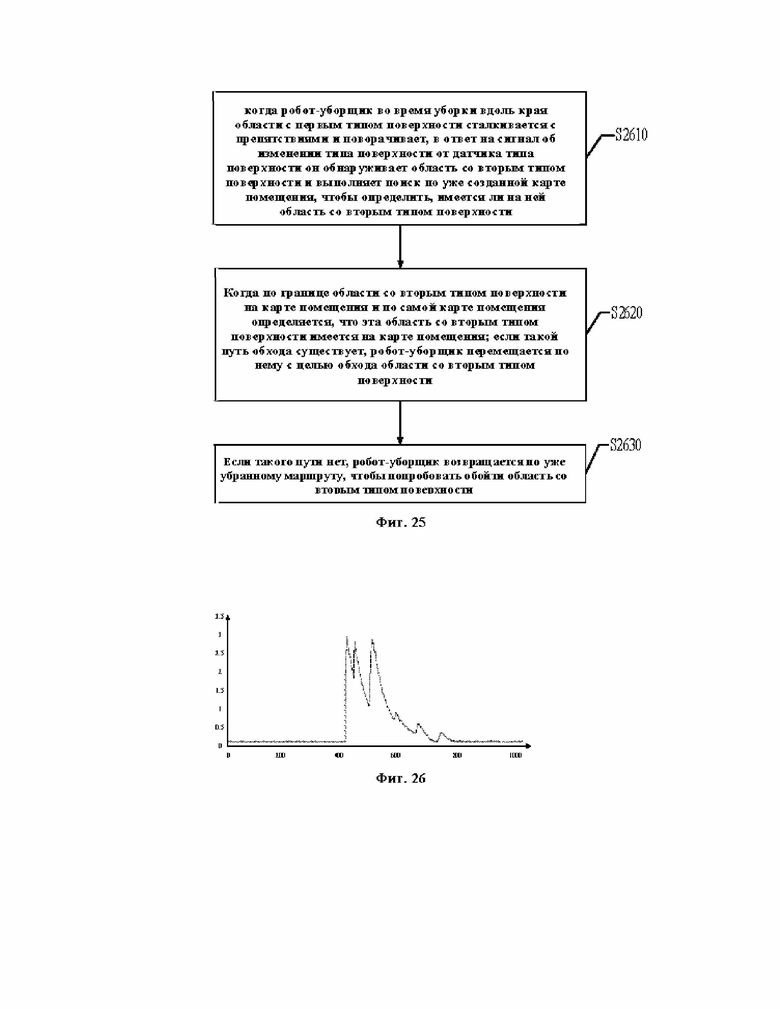
Способ обхода препятствий роботом-уборщиком включает в себя следующее: когда робот-уборщик во время уборки вдоль края области с первым типом поверхности сталкивается с препятствием и поворачивает, в ответ на сигнал датчика об изменении типа поверхности, который обнаруживает область со вторым типом поверхности, выполняется поиск по уже созданной карте помещения, чтобы определить, имеется ли на ней область со вторым типом поверхности; если область со вторым типом поверхности имеется на карте помещения, определяется, имеется ли путь для обхода этой области со вторым типом поверхности, на основании карты помещения и границы этой области на карте помещения; если такой путь имеется, робот-уборщик перемещается по этому пути, чтобы обойти эту область со вторым типом поверхности; если такого пути нет, робот-уборщик возвращается по уже убранному маршруту, чтобы попробовать обойти область со вторым типом поверхности. Технический результат заявленной группы изобретений позволяет решить проблему застревания робота-уборщика. 3 н. и 12 з.п. ф-лы, 30 ил.
1. Способ обхода препятствий роботом-уборщиком, который используется для робота-уборщика, включающего датчик типа поверхности, при этом способ включает в себя следующее:
когда робот-уборщик во время уборки вдоль края области с первым типом поверхности сталкивается с препятствием и поворачивает, в ответ на то, что сигнал датчика об изменении типа поверхности указывает на обнаружение области со вторым типом поверхности, выполняется поиск по уже созданной карте помещения, чтобы определить, имеется ли на ней область со вторым типом поверхности;
если область со вторым типом поверхности имеется на карте помещения, по карте помещения и по границе этой области на карте помещения определяется, имеется ли путь для обхода этой области со вторым типом поверхности;
если такой путь имеется, робот-уборщик перемещается по этому пути, чтобы обойти эту область со вторым типом поверхности;
если такого пути нет, робот-уборщик возвращается по уже убранному маршруту, чтобы попробовать обойти область со вторым типом поверхности.
2. Способ по п. 1, который также включает в себя следующее:
если область со вторым типом поверхности отсутствует на карте помещения, проводится сканирование края этой области, результат сканирования сохраняется на карте помещения.
3. Способ по п.1 или 2, в котором, когда робот-уборщик сталкивается с препятствиями и меняет свое направление во время уборки вдоль края области с поверхностью первого типа, в ответ на сигнал изменения типа поверхности от датчика происходит обнаружение области с поверхностью второго типа, после чего выполняется следующее:
определяется, не попала ли какая-либо часть робота-уборщика в область со вторым типом поверхности;
если хотя бы часть робота-уборщика попала в область со вторым типом поверхности, робот-уборщик движется в обратном направлении, чтобы уйти от области со вторым типом поверхности.
4. Способ по п. 3, в котором определение того, не попала ли какая-либо часть робота-уборщика в область с поверхностью второго типа, включает в себя следующее:
определяется, не находится ли место, где находится датчик типа поверхности на роботе-уборщике, уже в области со вторым типом поверхности;
если место, где находится датчик типа поверхности на роботе-уборщике уже в области со вторым типом поверхности, считается, что робот-уборщик вошел в область со вторым типом поверхности.
5. Способ по п. 4, в котором определение того, находится ли датчик типа поверхности робота-уборщика в области с поверхностью второго типа, включает в себя следующее:
датчик типа поверхности подает ультразвуковой сигнал в направлении, вертикальном к текущей поверхности, и принимает эхо-сигнал, отраженный от текущей поверхности; при этом датчик типа поверхности является ультразвуковым датчиком;
определяется, отличается ли фактически полученный эхо-сигнал от эхо-сигнала, отраженного от области с первым типом поверхности, и если отличается, считается, что датчик типа поверхности уже находится в области со вторым типом поверхности.
6. Способ по любому из пп. 3-5, в котором возврат робота-уборщика по маршруту уже выполненной уборки включает в себя следующее:
когда определяется, что робот-уборщик вышел из области со вторым типом поверхности, он поворачивается на месте таким образом, чтобы направление его движения было параллельно краю области с первым типом поверхности;
робот-уборщик возвращается по выбранному направлению движения.
7. Способ по любому из пп. 1-6, в котором действия после обнаружения области с поверхностью второго типа также включают в себя:
определяется, проходит ли маршрут уже выполненной уборки робота-уборщика вдоль стены;
если маршрут выполненной уборки робота-уборщика проходит вдоль стены, робот-уборщик возвращается по траектории вдоль стены.
8. Способ по п.7, в котором на основе карты помещения определяется, находится ли позади робота-уборщика область с поверхностью второго типа;
если за роботом-уборщиком находится область со вторым типом поверхности, робот-уборщик возвращается по маршруту уже выполненной уборки.
9. Способ по п. 8, в котором возврат робота-уборщика по траектории вдоль стены или по траектории уже выполненной уборки включает в себя следующее:
робот-уборщик отходит назад по маршруту вдоль стены или по маршруту уже выполненной уборки;
после отхода на заданное расстояние робот-уборщик поворачивается на месте;
если в ответ на сигнал изменения типа поверхности от датчика типа поверхности обнаруживается область со вторым типом поверхности, робот-уборщик продолжает отходить назад до тех пор, пока датчик типа поверхности не перестанет получать сигнал изменения типа поверхности.
10. Способ по любому из пп. 1-9, в котором, если путь не существует, способ также включает в себя следующее:
сигнал изменения типа поверхности от датчика типа поверхности игнорируется, и робот-уборщик дальше продолжает поворачиваться для возврата по маршруту уже выполненной уборки.
11. Способ по п. 10, в котором в процессе игнорирования сигнала об изменении типа поверхности от датчика типа поверхности и возврата робота-уборщика по траектории уже выполненной уборки способ также включает в себя следующее:
определяется, не исчез ли сигнал изменения типа поверхности от датчика типа поверхности;
если сигнал изменения типа поверхности от датчика исчез, робот-уборщик перемещается вперед на заданное расстояние и останавливается,
делает один оборот, и определяется, не покинул ли робот-уборщик область со вторым типом поверхности.
12. Способ по п. 11, в котором определение того, покинул ли робот-уборщик область с поверхностью второго типа, включает в себя следующее:
если на датчике типа поверхности срабатывает сигнал изменения типа поверхности, робот-уборщик продолжает возвращаться по маршруту уже выполненной уборки;
если на датчике типа поверхности не срабатывает сигнал изменения типа поверхности, робот-уборщик переходит в режим уборки.
13. Способ по любому из пп. 1-12, который используется для того, чтобы робот-уборщик находился в режиме уборки только области с поверхностью первого типа.
14. Устройство для обхода препятствий роботом-уборщиком, которое установлено на роботе-уборщике с датчиком типа поверхности и включает в себя следующее:
модуль (2901) определения типа поверхности, который конфигурирован так, чтобы, когда робот-уборщик во время уборки вдоль края области с первым типом поверхности сталкивается с препятствием и поворачивает, в ответ на сигнал об изменении типа поверхности от датчика типа поверхности, который указывает, что обнаружена область со вторым типом поверхности, выполнять поиск по уже созданной карте помещения, чтобы определить, имеется ли на ней область со вторым типом поверхности;
первый модуль управления (2902), который конфигурирован для определения, имеется ли путь обхода области со вторым типом поверхности, на основании карты помещения и границы области со вторым типом поверхности на карте помещения, если область со вторым типом поверхности имеется на карте помещения; и если такой путь обхода существует, для управления роботом-уборщиком для перемещения по этому пути для обхода области со вторым типом поверхности; и
второй модуль управления (2903), который конфигурирован так, чтобы, если такого пути не существует, управлять роботом-уборщиком для возврата по маршруту уже выполненной уборки, чтобы обойти область со вторым типом поверхности.
15. Машиночитаемый носитель информации, на котором хранится компьютерная программа, при этом, когда компьютерная программа выполняется процессором, реализуется способ обхода препятствий роботом-уборщиком по любому из пп. 1-13.
| CN 110393477 A, 10.11.2019 | |||
| CN 110507253 A, 29.11.2019 | |||
| CN 107184156 A, 22.09.2017 | |||
| WO 2021008611 A1, 21.01.2021 | |||
| СПОСОБ И АППАРАТ ДЛЯ ОСУЩЕСТВЛЕНИЯ ОПЕРАЦИИ ОЧИСТКИ ПОСРЕДСТВОМ ОЧИСТИТЕЛЬНОГО УСТРОЙСТВА И ЧИТАЕМЫЙ НОСИТЕЛЬ ДАННЫХ | 2017 |
|
RU2697154C1 |

