Изобретение относится к области автоматизации информационно-управляющих систем контроля за состоянием важных объектов, функционирующих в реальном масштабе времени и может быть использовано для борьбы с беспилотными летательными аппаратами (БЛА).
Известна система защиты границы охраняемой территории, описанная в Пат. РФ №2365857, МПК F41H 13/00 (2006/01), опубл. 27.08.2009, бюл. №24. Система предполагает осуществление защиты границы охраняемой территории с помощью видеокамеры общего обзора, подключенной к управляющему компьютеру, дистанционно-управляемого стрелкового оружия, установленного стационарно, с приводами вертикального и горизонтального перемещения и спускового механизма, соединенного каналом связи с контроллером оружия и приемо-передающим устройством оружия, которое соединено каналом связи с управляющим компьютером. Система снабжена датчиками движения, системами световой и звуковой сигнализации, беспилотными самолетами. Аналог обеспечивает огневое поражение БЛА, нарушивших границы заданного района.
Однако способ-аналог не предполагает определение траектории дальнейшего движения потенциально опасного БЛА, что резко снижает его эффективность (точность огневого воздействия).
Наиболее близким по своей технической сущности к заявляемому является способ борьбы с беспилотными летательными аппаратами, описанный в Пат. РФ №2625506, МПК F41H 13/00 (2006/01), опубл. 14.07.2017, бюл. №20. Способ заключается в том, что по результатам обнаружения и определения пространственных координат БЛА в передней области полета БЛА на расстоянии, не больше заданного от него, формируют пространственно-протяженную паутину из легких прочных полос (лент) синтетического волокна, обеспечивающего попадание в нее беспилотного летательного аппарата. Область пространственно-протяженной паутины создается путем отстрела в направлении БЛА снарядов, оснащенных кассетами с ленточной сетью.
Способ-прототип позволяет обнаруживать БЛА и осуществлять воздействие на них с помощью пространственно-протяженной паутины из лент синтетического волокна.
Однако, прототип обладает недостатком, ограничивающим его применение. В случаях, когда радиоэлектронные средства, размещенные на БЛА, не излучают радиосигналы, прототип теряет работоспособность. Кроме того, даже при регулярном излучении радиосигналов ему присуща низкая точность деструктивного воздействия из-за отсутствия прогнозирования маршрута полета БЛА.
Целью заявляемого технического решения является разработка способа, обеспечивающего повышение точности деструктивного воздействия на БЛА - нарушителя воздушного пространства охраняемого района благодаря определению скорости и прогнозированию маршрута его дальнейшего полета.
Поставленная цель достигается тем, что в известном способе борьбы с беспилотными летательными аппаратами, состоящем в обнаружении и определении пространственных координат БЛА, формировании в передней области полета БЛА на заданном расстоянии пространственно-протяженной паутины из покрытых антистатическим составом легких прочных полос синтетического волокна по меньшей мере в один эшелон, определяют моменты времени измерения координат БЛА, вычисляют скорость полета БЛА, экстраполируют маршрут дальнейшего полета БЛА на основе сглаживающих кубических параметрических сплайнов в трехмерном пространстве, а формирование пространственно-протяженной паутины осуществляют в ограниченном пространстве с координатами центра, находящимися на наиболее вероятном маршруте полета БЛА в момент времени, предшествующий его появлению.
При этом в качестве деструктивного воздействия на БЛА в заданный момент времени в определенной точке пространства возможно использование огневых средств поражения.
Благодаря новой совокупности существенных признаков в заявляемом способе благодаря измерению скорости полета БЛА и определению наиболее вероятного маршрута его дальнейшего полета, обеспечивается повышение точности деструктивного воздействия на него. Сохранение работоспособности предлагаемого способа в условиях отсутствия радиоизлучения средств радиосвязи БЛА может быть достигнуто использованием в качестве измерителя пространственных параметров радиолокатора.
Заявленный способ поясняется чертежами, на которых:
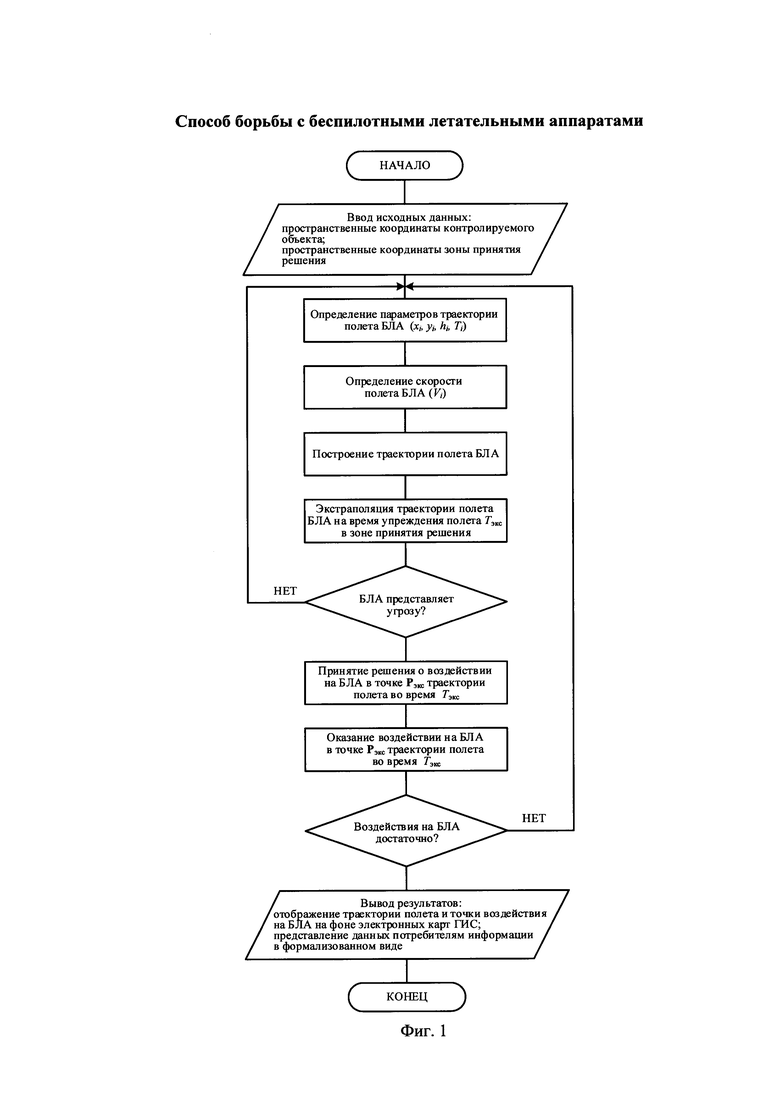
на фиг. 1 - обобщенный алгоритм обнаружения и деструктивного воздействия на БЛА;
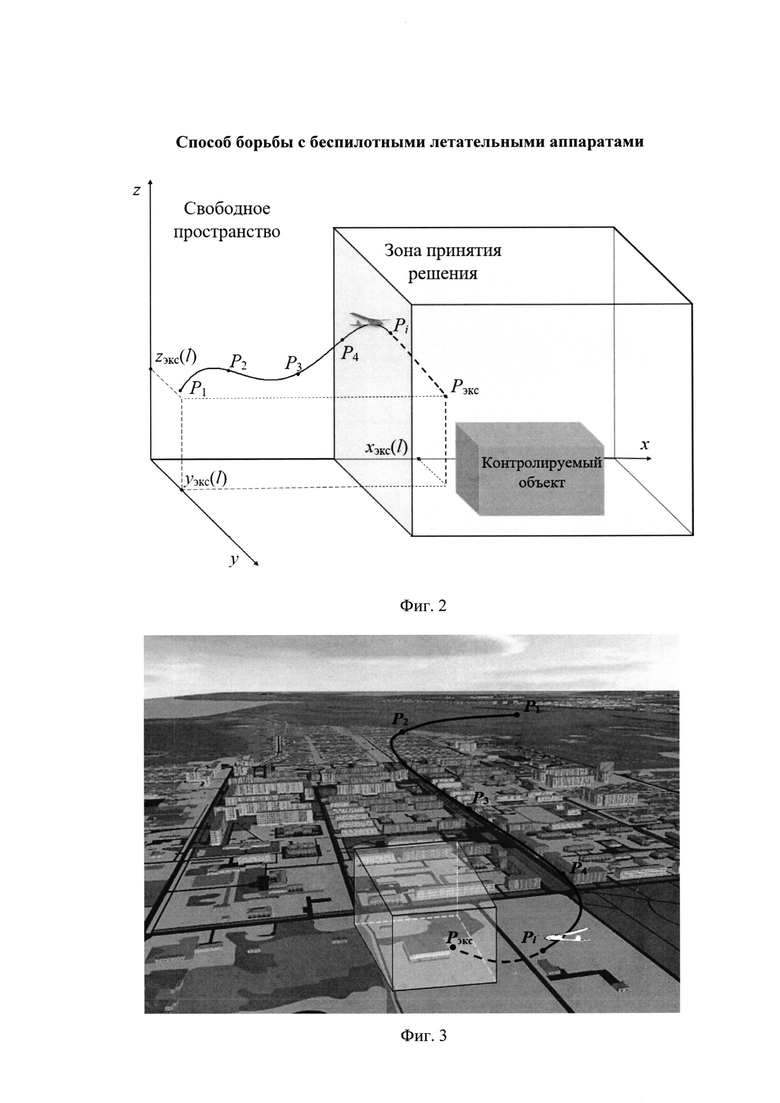
на фиг. 2 - порядок определения точки Рэкс с координатами (X, Y, Z)экс воздействия на БЛА в зоне принятия решения;
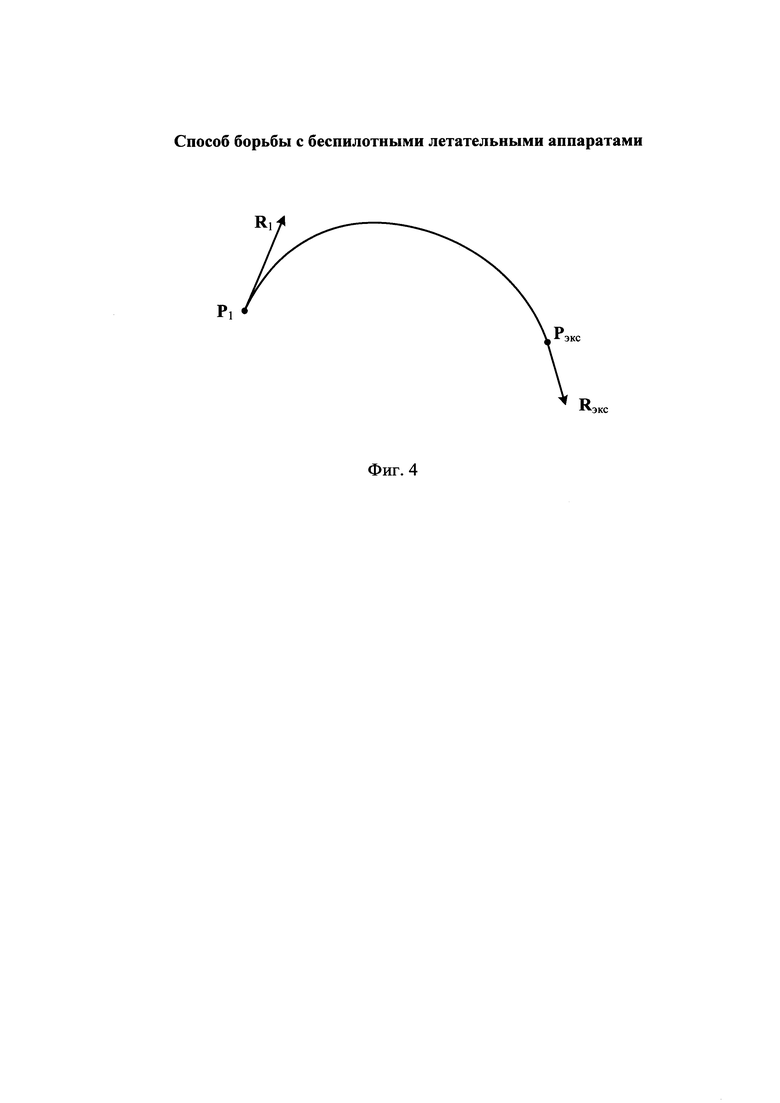
на фиг. 3 - вариант программной реализации вычисления траектории полета БЛА кубическим сплайном;
на фиг. 4 - параметрический сплайн в форме Эрмита.
Известно, что успешное применение БЛА насчитывает уже почти восемь десятилетий. В последние годы интерес к ним существенно вырос. Они являются одним из наиболее перспективных направлений развития авиации. Массовое производство БЛА привнесло существенные проблемы в области охраны важных государственных объектов различного назначения, включая аэродромы военного и гражданского назначения. На решение этой проблемы и направлено изобретение.
Широкое применение БЛА повлекло за собой разработку общих требований к каналам связи. Основные из них сформулированы в стандарте НАТО STANAG 4609 Edition 2, базирующиеся на коммерческих стандартах. Связь с малыми БЛА, радиус действия которых составляет десятки километров, организуется в диапазоне дециметровых волн. Для организации связи больших БЛА при отсутствии прямой видимости используют спутниковые линии связи. Возможна организация канала связи на основе ретрансляторов на БЛА, а также ионосферного распространения радиоволн.
Сущность изобретения состоит в обнаружении и определении пространственных координат БЛА с одновременной фиксацией моментов времени ti. На основе полученных данных определяют скорость полета БЛА. Далее используя алгоритмы аппроксимации и экстраполяции траектории полета БЛА и его скорости в трехмерном пространстве, определяют пространственные характеристики дальнейшего движения БЛА. В основе названных алгоритмов лежит кубический сплайн. Полученные результаты позволяют с высокой точностью спрогнозировать пространственное местоположение БЛА в интервале времени, а, следовательно, применить адекватное деструктивное воздействие.
В предлагаемом способе (см. фиг. 1) выполняют следующие операции. В заданном (известном) диапазоне частот осуществляют поиск и обнаружение излучений средств радиосвязи БЛА. Определяют пространственные координаты (X, Y, Z)i БЛА в i-й точке и одновременно фиксируют время ti их измерения. Определение траектории движения БЛА по нескольким пространственным точкам сводится к поиску функции кубического сплайна в трехмерном пространстве в параметрическом виде. При этом для достижения высокой точности аппроксимации достаточно вычислить значение сплайна в четырех пролетных точках (см. Роджерс, Адамс. Математические основы машинной графики. - М.: Машиностроение, 1985 г.).
На основе параметров ti и (X, Y, Z)i, i=1, 2, …, определяют расстояния между соседними пролетными точками Pi и Pi-1 в соответствии с выражением

В свою очередь скорость БЛА в интервале между i-й и i-1-й точками составит

где ΔTi,i-1=ti-ti-1.
В случае, когда скорость полета БЛА сохраняется на протяжении всей длительности полета, появление его в точке экстраполяции Рэкс находят как

где Sэкс - длина кривой между первой пролетной точкой P1 и точкой экстраполяции Рэкс (см. фиг. 2 и 3).
В противном случае, когда скорость БЛА отличается на различных участках полета БЛА, определяют временные затраты на пролет по каждому из них и далее полученные результаты суммируют.
Описание пространственной кривой маршрута полета БЛА в рамках заявки на основе дискретных точек Р1, Р2, …, Рэкз осуществляют с использованием кубического параметрического сплайна. Последний описывают системой уравнений вида (см. Роджерс Д., Адамс Дж. Математические основы машинной графики. - М.: Мир, 2001. - ISBN 5-03-002143-4)

где l - независимый параметр шага интерполяции, такой, что 0≤l≤1; а, b, c и d - искомые коэффициенты. Координаты точек Pi на кривой (см. фиг. 2) описывают вектором (x(l), y(l), z(l)), а три производные задают координаты соответствующего касательного вектора R в точке. Например, для координаты x

На основе эрмитовой формы задают параметрический кубический сплайн путем указания начальной и конечной точек (например P1 и Р4) и векторов касательных в них R1 и R4 соответственно (см. Приложение и фиг. 4). Для кривой более сложной формы на следующем участке конечная точка становится начальной, и добавляют новую конечную точку.
Возможность экстраполяции с использованием сплайн-функции на шаг вперед следует из выражения

где вектор L=[l3, l2, l, 1], Mh - Эрмитова матрица.
Умножив (6) на геометрический вектор Эрмита Ghx, получаем возможность для нахождения координат точек сплайна в явном виде

Аналогично определяют yэкс(l) и zэкс(l).
Зная координаты экстраполируемой точки траектории полета БЛА (7) и время нахождения в ней (3), принимают решение на деструктивное воздействие. В случае, когда в качестве контролируемого (охраняемого) объекта выступают элементы гражданского назначения (аэропорт, административные здания и др.), для этой цели используют пространственно-протяженную паутину, сети-ловушки и др. При охране важных государственных (военных) объектов, удаленных от гражданской инфраструктуры, целесообразно использование огневого поражения БЛА в соответствии с Пат. РФ №2365857. В этом случае поражение БЛА наносят в точке Рэкз с координатами (X, Y, Z)экс в момент времени Тэкз, значения которых определены в соответствии с предлагаемым способом.
Экстраполяция маршрута полета беспилотного летательного аппарата на основе кубического параметрического сплайна в трехмерном пространстве
Описание пространственной кривой маршрута полета беспилотного летательного аппарата (БЛА) на основе дискретных точек Р1, Р2, …, Рэкз (координат точек) осуществляют с использованием кубического параметрического сплайна. Последний описывают системой уравнений (см. Роджерс Д., Адамс Дж. Математические основы машинной графики. - М.: Мир, 2001. - ISBN 5-03-002143-4)

где l - независимый параметр шага интерполяции, такой, что что 0≤l≤1; а, b, с и d - искомые коэффициенты. Координаты точек Pi на кривой описывают вектором (x(l), y(l), z(l)), а три производные задают координаты соответствующего касательного вектора Ri в точке
В точках соединения Pi сегментов пространственной кривой должна соблюдаться ее непрерывность (без разрывов) и непрерывность касательных векторов Ri (без изменения наклона). Существует несколько способов описания параметрических кубических кривых: формы Эрмита, Безье и В-сплайны. В материалах заявки использована форма Эрмита.
Используя матричное представление выражений (1) и (2), имеем:

где L=[l3, l2, l, 1],  =[a, b, c, d]x.
=[a, b, c, d]x.
Задача построения кривой сводится к нахождению значений элементов матрицы Cx, т.е. коэффициентов ax, bx, cx, dx, удовлетворяющих условиям:

Из (3) следует, что x(0)=Р1х=[0, 0, 0, 1]Cx, x(1)=Р4х=[1, 1, 1, 1]Cx. Для касательных R имеем: x'(0)=R1x=[0, 0, 1, 0]Cx, x'(1)=R4x=[3, 2, 1, 0]Cx. На основе полученных выражений имеем векторно-матричное уравнение:
Это уравнение решают относительно Cx нахождением обратной матрицы размером 4×4
где Mh - Эрмитова матрица, Ghx - геометрический вектор Эрмита. Путем подстановки (7) в (3), получаем x(l)=L⋅Mh⋅Ghx. Аналогично определяют значения для y(l)=L⋅Mh⋅Ghy и z(l)=L⋅Mh⋅Ghz. Возможность экстраполяции кривой сплайн-функцией на шаг вперед следует из выражения

Умножив (8) на Ghx, получают выражение для вычисления координат точек сплайна в явном виде:

Четыре выражения в скобках называют функциями сглаживания. Аналогично находят значения yэкс(l) и zэкс(l).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ОБХОДА И ПРЕОДОЛЕНИЯ ОПАСНЫХ ЗОН БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2797956C1 |
| Способ борьбы с артиллерией противника | 2018 |
|
RU2694421C1 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| Способ борьбы с беспилотными летательными аппаратами | 2016 |
|
RU2625506C1 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА РЕЛЬЕФА МЕСТНОСТИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2014 |
|
RU2571845C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ | 2018 |
|
RU2725662C2 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНЫХ УСЛОВИЯХ | 2019 |
|
RU2725640C1 |
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ДЛЯ ОБЛЕТА ГОРОДСКОЙ ЗАСТРОЙКИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2661269C2 |
| Способ разведки ледовой обстановки с использованием дистанционно управляемых беспилотных летательных аппаратов и устройство для его осуществления | 2021 |
|
RU2778158C1 |
| Способ сокращения потерь скорости и времени при осуществлении маневра заданной конфигурации беспилотным летательным аппаратом планирующего типа | 2016 |
|
RU2623361C1 |
Изобретение относится к области авиации, в частности к способам противодействия беспилотным летательным аппаратам (БЛА). Способ борьбы с БЛА основан на обнаружении и определении пространственных координат БЛА, формировании на заданном расстоянии в передней области полета БЛА пространственно-протяженной паутины из покрытых антистатическим составом легких прочных полос синтетического полотна по меньшей мере в один эшелон. При этом определяют моменты времени измерения координат БЛА, вычисляют скорость полета БЛА, экстраполируют маршрут дальнейшего полета БЛА на основе сглаживающих кубических параметрических сплайнов в трехмерном пространстве. Формирование пространственно-протяженной паутины осуществляют в ограниченном пространстве с координатами центра, находящегося на наиболее вероятном маршруте полета БЛА в момент времени, предшествующий его появлению. Обеспечивается повышение точности деструктивного воздействия на БЛА - нарушителя воздушного пространства. 4 ил.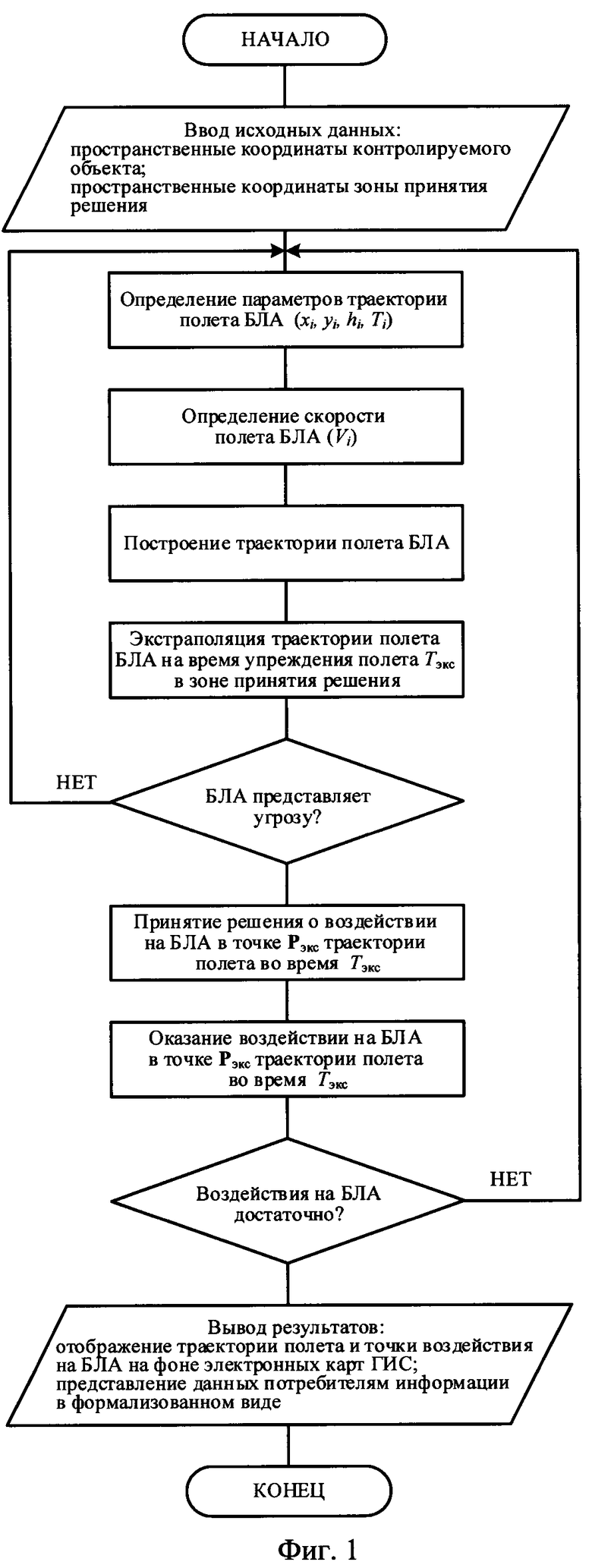
Способ борьбы с БЛА, основанный на обнаружении и определении пространственных координат БЛА, формировании на заданном расстоянии в передней области полета БЛА пространственно-протяженной паутины из покрытых антистатическим составом легких прочных полос синтетического полотна по меньшей мере в один эшелон, отличающийся тем, что определяют моменты времени измерения координат БЛА, вычисляют скорость полета БЛА, экстраполируют маршрут дальнейшего полета БЛА на основе сглаживающих кубических параметрических сплайнов в трехмерном пространстве, а формирование пространственно-протяженной паутины осуществляют в ограниченном пространстве с координатами центра, находящимися на наиболее вероятном маршруте полета БЛА в момент времени, предшествующий его появлению.
| Способ борьбы с беспилотными летательными аппаратами | 2016 |
|
RU2625506C1 |
| Способ электролитического меднения из цианисто-медных электролитов | 1947 |
|
SU72754A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АЭРОБАЛЛИСТИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПО ЗАДАННОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ | 2013 |
|
RU2571567C2 |
| US 7602480 B2, 13.10.2009 | |||
| US 20140188378 A1, 03.07.2014. | |||

