Изобретение относится к системам управления летательными аппаратами, в частности к способу формирования маршрута обхода и преодоления опасных зон беспилотным летательным аппаратом, и может быть использовано для управления летательными аппаратами авиационных комплексов для обхода и преодоления опасных зон.
При разработке комплекса бортового оборудования беспилотного летательного аппарата одной из важнейших задач является повышение автономности и автоматизации комплекса бортового оборудования. В связи с отсутствием экипажа на борту беспилотного летательного аппарата требуется повышение уровня автоматизации, включая обеспечение автоматического построения маршрута обхода зон противовоздушной обороны и зон метеообразований, представляющих определенную опасность для беспилотного летательного аппарата, или маршрута наиболее безопасного преодоления таких зон при невозможности их обхода.
Известен способ управления беспилотным летательным аппаратом, патент RU 2729905 С1, опублик. 13.08.2020, Кл. G05D 1/10, В64С 39/00, характеризующийся тем, что осуществляют формирование и передачу сигналов управления с командного пункта на борт летательного аппарата с использованием комплекса средств связи, взаимодействующего с бортовой цифровой вычислительной машиной, посредством которой осуществляют проверку обжатия опор шасси и анализ информации о состояниях бортовых систем, линий связи и командного пункта.
Из патента RU 2728197 С1, опублик. 28.07.2020, Кл. В64С 13/00, G05D 1/10, G01C 23/00, G08G 5/00, известен способ управления группой БЛА, заключающийся в том, что для каждого n-го БЛА в его инерциальной навигационной системе измеряют его текущую скорость, вычисляют направление его полета, с помощью датчиков измеряют угол визирования каждого m-го потенциально опасного объекта, расстояние до него, скорость сближения с ним, угловую скорость линии визирования этого объекта, на основе этих измеренных и вычисленных значений известным способом вычисляют координаты и векторы скоростей n-го БЛА (Vn) и m-го объекта (Vm), причем по заранее известным значениям максимального поперечного ускорения m-го объекта строят две окружности с центром на расстоянии h от линии движения n-го БЛА и радиусом, определяющие возможности поворота m-го объекта на n-й БЛА, определяют в пространстве точку встречи n-го БЛА и m-го объекта, далее для всех полученных возможных точек встреч каждого n-го БЛА со всеми потенциально опасными объектами с использованием диаграмм Вороного, построенных алгоритмом Форчуна, и сглаживания пути кривыми Корню по границам областей разбиения в полученной диаграмме Вороного формируют траекторию полета и значения сигнала управления n-м БЛА, затем сформированные траекторию и сигнал управления передают в систему управления для реализации найденного сигнала управляющими органами n-го БЛА, чем обеспечивают коррекцию его движения с учетом предотвращения возможного столкновения с каждым из m окружающих объектов.
Из патента RU 2755411 С1, опублик. 28.07.2020, Кл. F41G 7/00, F41G 7/34, G05D 1/00, известен способ дистанционной коррекции полетного задания беспилотного летательного аппарата, включающий подготовку полетных заданий и организацию контура дистанционного управления для изменения участков траектории полета беспилотного летательного аппарата, при этом полетные задания беспилотного летательного аппарата и информационные материалы, используемые для работы его бортовых средств коррекции, готовят заблаговременно в составе единого пакета данных, а в процессе полета беспилотного летательного аппарата осуществляют контроль его состояния путем выдачи опросных посылок с наземного пункта управления через космический аппарат на беспилотный летательный аппарат и получения ответных сообщений наземным пунктом управления через космический аппарат с борта беспилотного летательного аппарата в ответ на каждую опросную посылку, а при возникновении потенциально опасных условий осуществляют выбор замещающего полетного задания на наземном пункте управления по совокупности критериев максимальной близости исходного пункта назначения и безопасности полета беспилотного летательного аппарата и доводят короткий сигнал на смену полетного задания, позволяющий, в том числе, задать резервный пункт назначения или изменить полетное задание целиком.
Наиболее близким аналогом, изобретения является известный из патента 2700157 С1, опублик. 12.09.2019, Кл. G05D 1/00, G08G 5/00, G01C 21/00, G06F 17/00, способ управления летательным аппаратом, заключающийся в том, что производят автоматическое построение траектории обхода опасных зон из заданной начальной точки в заданную конечную точку пути по известным координатам начальной и конечной точек пути, направлению скорости летательного аппарата в начальной точке и допустимому радиусу его разворота R, а также множеству опасных зон по назначенным потребителем заранее узлам расчетной сетки строят множество вершин графа путей обхода опасных зон, затем строят множество ребер графа путей обхода опасных зон, затем методом Дейкстры решают задачу нахождения кратчайшего пути в графе, при этом алгоритм построения графа путей обхода опасных зон формируют в виде следующей последовательности действий: опасные зоны задают эллипсами, для каждого из которых известны координаты х, у центра, длины полуосей a, b и угол φ поворота полуоси а относительно оси координат X, затем к списку полученных эллипсов добавляют две окружности радиуса R, проходящие через начальную точку пути, причем направление движения в начальной точке является общей касательной к этим окружностям, далее строят множество вершин графа путей следующим образом 1) формируют начальное множество вершин графа, состоящее из вершины, соответствующей конечной точке пути, 2) для каждой пары различных эллипсов из списка опасных зон решают задачу нахождения всех общих касательных отрезков к обоим эллипсам и для каждой точки касательной, лежащей на эллипсе, в граф добавляют две вершины, соответствующие двум направлениям движения по границе эллипса, для каждого эллипса и конечной точки пути решают задачу построения касательных к эллипсу, выходящих из этой точки, затем для каждой точки касательной, лежащей на эллипсе, в граф добавляют две вершины, соответствующие этой точке и двум направлениям обхода эллипса, 4) в граф добавляют две вершины, соответствующие начальной точке пути, лежащие на двух построенных окружностях, причем направление обхода окружностей в этих вершинах совпадает с направлением начальной скорости, далее строят множество ребер графа путей, где ребра имеют направление и длину, следующим образом: 1) для каждой пары вершин, соответствующих точкам на различных эллипсах, лежащих на общем касательном отрезке, решают задачу о пересечении этого отрезка со всеми остальными эллипсами; если пересечения нет и направления в вершинах согласованы с движением из первой точки во вторую (т.е. при движении по общей касательной между двумя эллипсами из первой точки в заданном направлении попадают во вторую точку, причем направление движения будет совпадать с заданным во второй точке направлением), то эту пару вершин соединяют ребром, длина которого равна расстоянию между этими точками; 2) для конечной точки пути и каждой точки выходящей из нее касательной к эллипсу, лежащей на нем, решают задачу о пересечении отрезка между этими двумя точками со всеми остальными эллипсами, при этом если пересечения нет, то в граф добавляют ребро с начальной вершиной, лежащей на эллипсе, и заданным направлением движения на конечную точку пути, и конечной вершиной, соответствующей конечной точке пути, при этом длину ребра полагают равной расстоянию между конечной точкой пути и соответствующей точкой на эллипсе; 3) пару вершин, соответствующих точкам, лежащим на одном эллипсе, соединяют ребром, если эти точки на эллипсе являются соседними и направления движения из первой точки во вторую согласованы (т.е. при движении по границе эллипса из первой точки в заданном направлении вторая точка будет первой из встреченных и направление движения во второй точке совпадает с заданным направлением), а путь между этими точками по границе эллипса не пересекается с другими опасными зонами, при этом длину ребра полагают равной расстоянию на эллипсе между двумя точками; затем к построенному графу путей обхода опасных зон применяют алгоритм Дейкстры поиска кратчайшего пути в графе, где в качестве начальных условий выбраны нули в двух вершинах, соответствующих начальной точке пути на двух построенных окружностях, и бесконечности во всех остальных точках; в результате выполнения алгоритма Дейкстры получают кратчайший путь в каждую вершину графа, при этом путь в вершину, соответствующую конечной точке, является требуемым путем, затем по последовательности вершин этого пути формируют кратчайшую траекторию летательного аппарата обхода опасных зон, состоящую из прямолинейных участков и дуг эллипсов, после чего построенную траекторию по командным радиолиниям связи передают в систему командного управления, в которой формируют сигналы управления летательного аппарата, обеспечивающие движение по построенной траектории.
Технической задачей, на решение которой направлено изобретение, является разработка способа формирования пути обхода опасных зон или прохода через них с минимизацией вероятности потери летательного аппарата, при отсутствии вариантов обхода и реализация автономных режимов с автоматическим принятием решений по обходу и проходу опасных зон и безопасность полета беспилотного летательного аппарата.
Технический результат, достигаемый изобретением, заключается в возможности автоматического построения кратчайшего маршрута обхода и преодоления опасных зон беспилотным летательным аппаратом, без участия пилота, обеспечение обхода и преодоления беспилотным летательным аппаратом опасных зон или совокупности опасных зон с минимизацией маршрута по длине, повышение безопасности полета беспилотного летательного аппарата, повышение автоматизации и эффективности выполнения задач беспилотным летательным аппаратом, снижение информационной нагрузки на экипаж на наземном пункте управления.
Технический результат достигается реализацией способа формирования обхода и преодоления опасных зон беспилотным летательным аппаратом, при котором производят автоматическое построение маршрута обхода и преодоления опасных зон из начальной точки в заданную конечную точку пути по известным координатам начальной и конечной точек, допустимому радиусу разворота, а также множеству опасных зон, при этом при инициализации построения маршрута на плоскости долгота-широта формируют единичный квадрат, при этом если беспилотный летательный аппарат находится на линии заданного пути, то его местоположение принимается вершиной единичного квадрата зоны маршрута, а диагональ единичного квадрата зоны маршрута лежит на линии заданного пути в направлении конечной точки, если беспилотный летательный аппарат находится вне линии заданного пути, то вершиной единичного квадрата зоны маршрута принимается точка пересечения линии заданного пути с прямой проведенной от беспилотного летательного аппарата к линии заданного пути под углом 45°, при этом выбирается точка пересечения, которая является ближайшей к пройденному промежуточному пункту маршрута, а диагональ единичного квадрата зоны маршрута лежит на линии заданного пути в направлении конечной точки, при этом единичный квадрат зоны маршрута имеет на своей стороне N точек - возможных положений беспилотного летательного аппарата, и состоит из квадратных ячеек, при этом на одной стороне квадрата расположено (N-1) ячеек, при этом сторона ячейки В (м), а сторона квадрата А=(N-1)*В (м), формируют расчетное поле, представляющее собой сетку точек - возможных положений беспилотного летательного аппарата, путем добавления единичного квадрата на линии заданного пути, таким образом, что диагональ единичного квадрата зоны маршрута лежит на линии заданного пути в направлении конечной точки, и соединения вершин квадратов прямыми параллельными линии заданного пути, полученную информационно-управляющей системой комплекса бортового оборудования беспилотного летательного аппарата информацию об опасных зонах, таких как зоны противовоздушной обороны и зоны метеообразований, переносят на сетку точек расчетного поля, присваивают точкам расчетного поля коэффициенты опасности, из точек расчетного поля и соответствующих точкам ребер формируют направленный взвешенный граф, представляющий собой множество вершин с порядковыми номерами -индексами вида [I, J], соединенных ребрами - сторонами ячеек единичного квадрата, с направлением возможных переходов между вершинами, при этом для каждой вершины графа рассчитываются следующие параметры:
ΣG - коэффициент, эквивалентный пройденному в графе пути;
Н - коэффициент, отражающий оценку оставшегося в графе пути;
S - коэффициент, эквивалентный общей вероятности потери летательного аппарата при переходе в вершину;
F - коэффициент, отражающий общий вес пути, по которому осуществляется перемещение в вершину,
при этом пройденный в графе путь рассчитывают как сумма весов ребер от начальной вершины до исследуемой:

где:
 - текущая вершина, из которой производится расчет исследуемой вершины;
- текущая вершина, из которой производится расчет исследуемой вершины;
G(xi,j) - базовый вес ребра перехода из текущей вершины в исследуемую, соответствует весам Gside и Gdiag в зависимости от направления перехода;
 - коэффициент, эквивалентный пройденному в графе пути из начальной вершины в текущую.
- коэффициент, эквивалентный пройденному в графе пути из начальной вершины в текущую.
S(xi,j) - коэффициент опасности перемещения в исследуемую вершину,
рассчитывают кратчайший оставшийся путь между исследуемой и конечной вершинами, который не учитывает перемещение по ребрам:

при этом коэффициент общего веса пути к вершине вычисляется как:
F(xi,j)=Н(xi,j)+ΣG(xi,j)
где xi,j - исследуемая вершина,
оставшийся путь рассчитывают по формуле:
Еост(xi,j)=(⏐i-j⏐)*Gside+(N-max(i,j))*Gdiag
пройденный путь рассчитывают по формуле:

для каждой вершины дополнительно рассчитываются
Ет(xi,j)=Еост(xi,j)+ΣЕпр(xi,j),
строят маршрут обхода и преодоления опасных зон беспилотным летательным аппаратом от текущего положения летательного аппарата до конечной точки, лежащей на линии заданного пути, итерационно через вершины графа с наименьшими значениями F(xi,j) коэффициента общего веса пути к вершине.
Изобретение поясняется следующими изображениями:
фиг. 1 - маршрут обхода опасных зон, нанесенный на расчетное поле,
фиг. 2А - формирование единичного квадрата расчетного поля,
фиг. 2Б - формирование единичного квадрата расчетного поля, в случае если летательный аппарат находится на линии заданного пути,
фиг. 3 - формирование сетки точек,
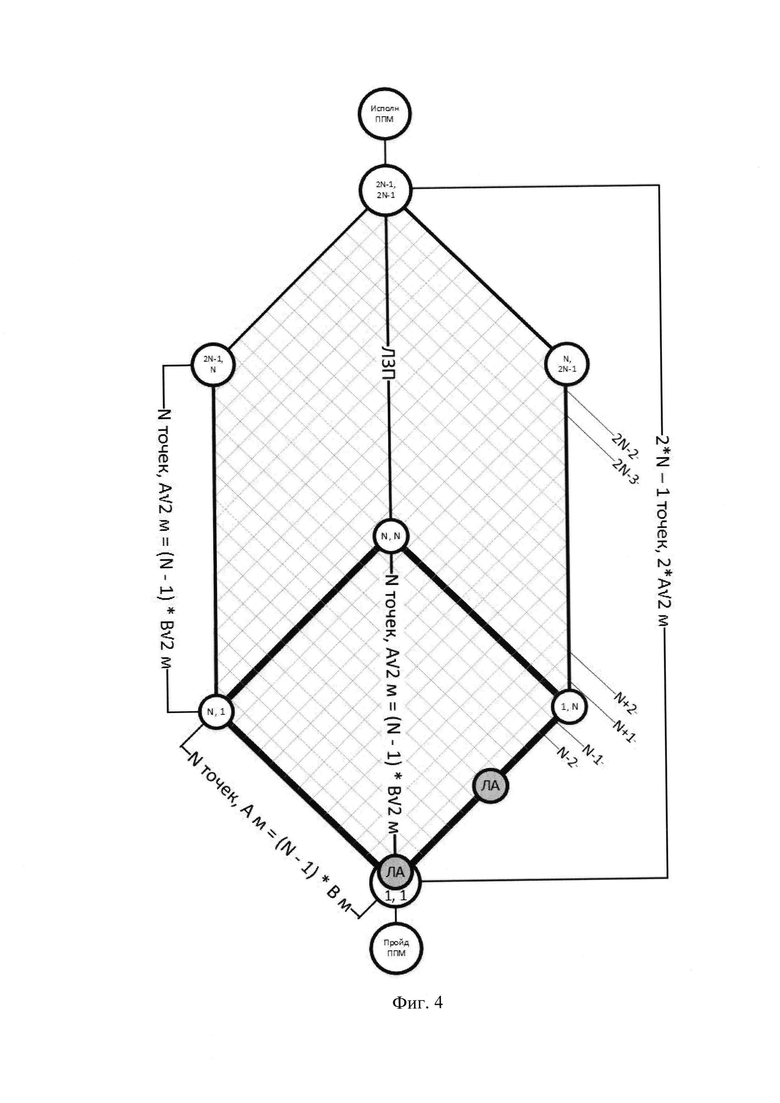
фиг. 4 - расчетное поле и возможные положения летательного аппарата,
фиг. 5 - связь между минимальным радиусом разворота летательного аппарата и размером ячейки,
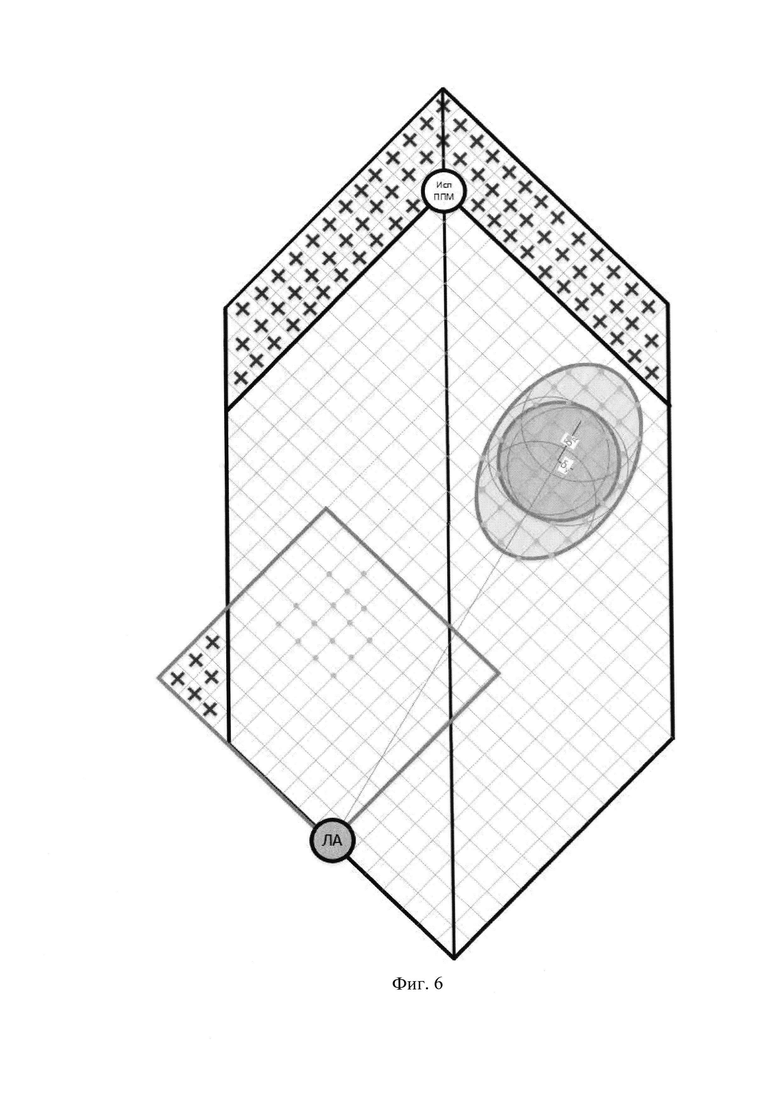
фиг. 6 - наложение информации об опасных зонах на расчетное поле,
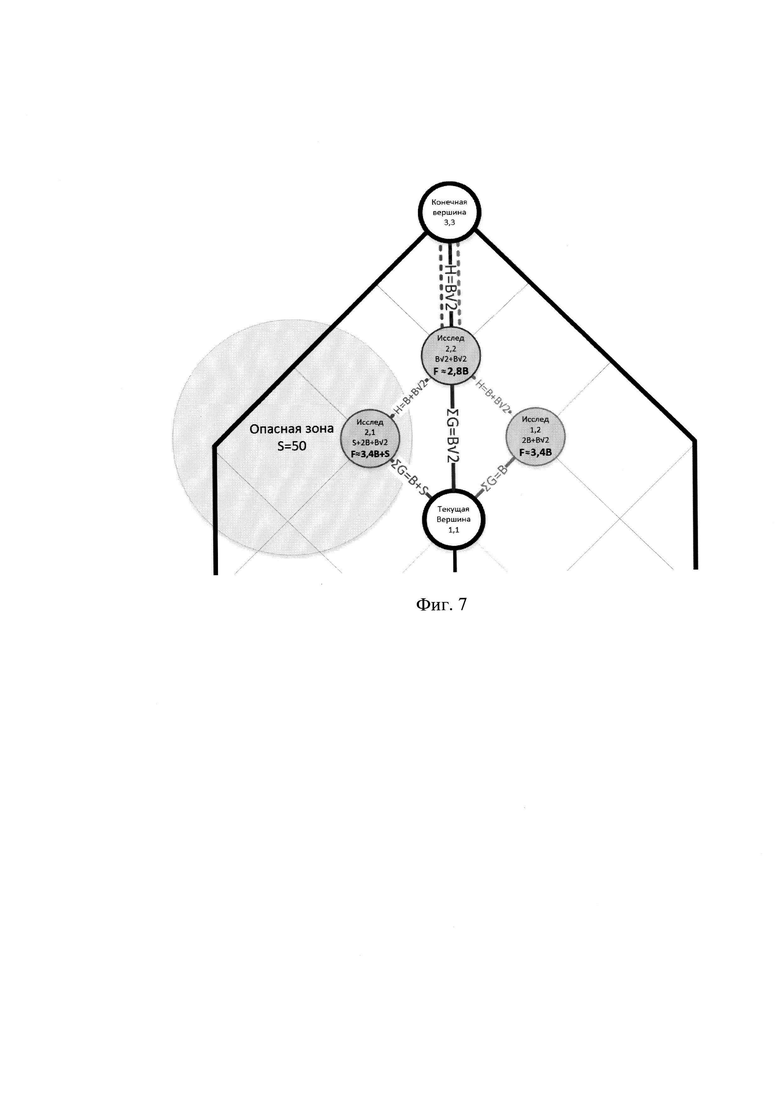
фиг. 7 - возможные перемещения летательного аппарата из текущей точки,
фиг. 8 - варианты маршрутов обхода опасных зон.
На маршруте движения беспилотного летательного аппарата по линии заданного пути существует вероятность возникновения зон, представляющих опасность для беспилотного летательного аппарата.
В случае обнаружения комплексом бортового оборудования беспилотного летательного аппарата опасной зоны, имеющей пересечение с линией заданного пути, необходимо рассчитать маршрут оперативного маневрирования в горизонтальной плоскости с целью обхода опасных зон (если возможно) или минимизацией рисков поражения летательного аппарата в опасной зоне.
Основным критерием оптимальности маршрута обхода опасных зон является безопасность полета летательного аппарата.
Способ построения маршрута учитывает следующие ограничения:
1. Объем вычислений должен быть конечен и заранее определен.
2. Маршрут обхода опасных зон должен быть минимизирован по длине.
3. Маршрут должен иметь минимально возможное удаление от линии заданного пути.
4. Маршрут должен учитывать имеющийся запас топлива.
5. Маршрут должен формироваться на допустимых к пролету участках (исходя из матрицы высот).
6. Максимально допустимое отклонение по курсу от линии заданного пути не должно превышать 45°.
7. Первая и последняя точки маршрута обхода должны находиться на линии заданного пути.
8. Исполняемый ППМ обязателен к пролету.
9. Маршрут обхода не должен содержать повороты на 90° (в целях обеспечения траекторного управления).
Способ формирования обхода и преодоления опасных зон беспилотным летательным аппаратом должен построить минимизированный по длине маршрут, если он возможен, проходящий только по безопасным участкам или наиболее безопасным путем через опасную зону или их совокупность, если нет безопасных участков. Таким образом маршрут обхода без вхождения в опасные зоны, минимизированный по длине, должен быть построен всегда, когда он существует.
Для поиска маршрута обхода опасных зон плоскость долгота-широта рассматривается в виде сетки точек возможных положений беспилотного летательного аппарата и формируется расчетное поле, содержащее информацию, полученную и обработанную комплексом бортового оборудования.
Для поиска маршрута обхода опасных зон горизонтальная плоскость представляется как сетка точек. Сетка имеет определенную форму и размеры и ориентирована относительно пройденного и исполняемого промежуточного пункта маршрута и линии заданного пути. Размеры сетки обуславливаются дальностью радиогоризонта. Далее на сетку накладываются данные об опасных зонах, точкам сетки соответственно расположению опасных зон назначаются коэффициенты опасности. Такая сетка называется расчетным полем. Алгоритм использует расчетное поле заданных размеров и конфигурации вне зависимости от количества опасных зон, их расположения в конкретный момент времени и расположения летательного аппарата относительно линии заданного пути и промежуточного пункта маршрута.
Формируется единичный квадрат. Существует два варианта расположения квадрата в зависимости от расположения летательного аппарата.
Если летательный аппарат находится на линии заданного пути, то одна из вершин квадрата соответствует его местоположению, а диагональ этого квадрата лежит на линии заданного пути в направлении конечной точки, как показано на фиг. 2А.
Если летательный аппарат находится вне линии заданного пути, то начальная точка привязана к линии заданного пути в месте пересечения прямой, проведенной от летательного аппарата к линии заданного пути под углом 45°, при этом выбирается та точка пересечения, которая является ближайшей к пройденному ППМ. Диагональ этого квадрата лежит на линии заданного пути в направлении конечной точки, как показано на фиг. 2Б. При этом летательный аппарат располагается на одной из сторон единичного квадрата, примыкающей к начальной точке.
Сформированный единичный квадрат состоит из квадратных ячеек и содержит несколько точек - возможных положений беспилотного летательного аппарата. Количество точек на стороне квадрата - N шт., общее количество точек в квадрате - N*N шт. Сторона одной ячейки - В, м, расстояние между точками по диагонали в квадрате ячейки -  м. Сторона единичного квадрата - А=(N-1)*В, м, диагональ -
м. Сторона единичного квадрата - А=(N-1)*В, м, диагональ -  м.
м.
Расчетное поле формируется путем добавления еще одного единичного квадрата на линии заданного пути, таким образом, что диагональ единичного квадрата зоны маршрута лежит на линии заданного пути в направлении конечной точки, и соединения вершин квадратов прямыми параллельными линии заданного пути. Таким образом, расчетное поле представляет собой шестиугольную зону (фиг. 3).
Каждая точка сетки имеет индекс - порядковый номер вида [I, J]. На единичном квадрате расчетного поля индекс [1] соответствует точкам на линиях поля влево от начальной точки и линии заданного пути и имеет целочисленные значения от 1 до N. Далее линии по левой стороне расчетного поля вне единичного квадрата имеют номера от N+1 до 2*N-1. Аналогично на единичном квадрате расчетного поля индекс [J] соответствует точкам на линиях поля вправо от начальной точки и линии заданного пути и имеет целочисленные значения от 1 до N. Далее линии по правой стороне расчетного поля вне единичного квадрата имеют номера от N+1 до 2*N-1.
Начальная точка расчетного поля имеет индекс [1, 1], конечная -[2*N-1, 2*N-1]. Все точки, находящиеся на линии заданного пути, имеют индексы [I, J] такие, что I=J.
Площадь расчетного поля равняется трем площадям единичного квадрата, а количество точек на нем - 3*N*(N-1)+1.
Если конечная точка (исполняемый ППМ) располагается внутри расчетного поля, то часть расчетного поля, находящаяся за ней, исключается из расчетов.
При выполнении обхода и перемещении летательного аппарата на расстояние стороны или диагонали ячейки, расчетное поле перестраивается относительно нового местоположения летательного аппарата. При перестроении происходит обновление данных об опасных зонах, информация заново наносится на поле и происходит перерасчет маршрута обхода, прокладываемого от текущего положения летательного аппарата до конечной точки, лежащей на линии заданного пути.
Из-за перестроения поля, на всем протяжении работы алгоритма обхода, летательный аппарат может находиться либо в точке начала построения расчетного поля, лежащей на линии заданного пути, либо на левой или правой его стороне, примыкающей к точке начала построения.
Так как расчетное поле представляет собой прямоугольную сетку точек в форме вытянутого шестиугольника, перемещения возможны только по стороне В и диагонали  ячейки. То есть, на такой плоскости любой маршрут обхода любых опасных зон с любым количеством поворотных точек будет состоять только из прямолинейных участков или поворотов на 45°.
ячейки. То есть, на такой плоскости любой маршрут обхода любых опасных зон с любым количеством поворотных точек будет состоять только из прямолинейных участков или поворотов на 45°.
Дискретность сетки ограничивается возможностью выполнения такого маневра, что, в свою очередь, зависит от минимального радиуса разворота летательного аппарата.
В обеспечение плавности траектории прохождение поворотных точек рекомендуется осуществлять методом линейно-упреждающего разворота. При этом фактический пройденный путь станет короче на  . Вместе с тем, летательный аппарат отклонится от поворотной точки на
. Вместе с тем, летательный аппарат отклонится от поворотной точки на  Вследствие этого необходимо ввести ограничение
Вследствие этого необходимо ввести ограничение  не позволяющее траектории отклониться достаточно для попадания летательного аппарата в опасную зону.
не позволяющее траектории отклониться достаточно для попадания летательного аппарата в опасную зону.
Размер ячейки расчетного поля В и количество точек на стороне единичного квадрата поля N влияют на ширину поля, определяя максимально возможное удаление от ЛЗП: 
Таким образом, возможность выполнения маршрута существует, когда сторона ячейки поля В и минимальный радиус разворота R летательного аппарата связаны зависимостью 
На фиг. 5 показана связь между минимальным радиусом разворота летательного аппарата и размером ячейки расчетного поля.
Комплекс бортового оборудования беспилотного летательного аппарата получает и обрабатывает информацию об опасных зонах, таких как зоны противовоздушной обороны и зоны метеообразований.
При получении информации об опасных зонах производится наложение информации на сформированную сетку точек. Эта информация может накладываться несколькими способами.
Первый способ удобен, когда летательному аппарату доступна информация о некоторой площади по ходу движения летательного аппарата. В этом случае данные компонуются и передаются в виде сетки точек на горизонтальной плоскости, представляющей собой квадрат, унифицированный масштабом сетки с расчетным полем. Квадрат имеет фиксированные характеристики, а его положение определяется координатами (широта-долгота) одной вершины и направлением диагонали.
Альтернативный способ нанесения данных об опасных зонах применяется, когда имеются данные только о радиусе опасной зоны и расположении ее центра, дополнительно могут быть заданы значения ошибок определения положения центра зоны по дальности и по пеленгу. Способ является менее предпочтительным и точным, так как любая опасная зона представляется как круг (или эллипс), при этом ее настоящая геометрия и однородность не учитываются.
По результатам нанесения данных на расчетное поле, точкам расчетного поля присваиваются значения опасности, при этом значения имеют только те точки поля, которые гарантированно попадают в зону. Зоны, не попадающие в область поля, игнорируются.
На фиг. 6 показано наложение информации об опасных зонах на сетку точек, а также исключение из расчета некоторых точек.
После нанесения данных об опасных зонах для нахождения маршрута обхода формируется направленный взвешенный граф. Граф представляет из себя множество вершин с порядковыми номерами - индексами вида [I, J], соединенных ребрами. Ребра графа - это линии перехода из вершины графа в соседнюю вершину. Положение вершин и ребер соответствует положению соответствующих точек и линий расчетного поля. Граф является направленным, то есть имеет начальную и конечную вершину. Маршрут строится из начальной в конечную и никак иначе. Граф является взвешенным, то есть ребра могут иметь различный вес.
Ребра графа взаимно параллельны либо взаимно перпендикулярны и образуют ячейки. Исходя из этого, существует два типа ребер - соединяющие вершины ячейки по ее стороне и по диагонали внутри ячейки. Конкретные базовые значения весов ребер в графе есть безразмерные величины и не принципиальны, но должны при некотором приближении сохранять соотношение, исходя из свойств ортогональности системы -  где Gside - вес ребра между соседними вершинами по стороне ячейки графа, эквивалентный расстоянию В, Gdiag - вес ребра между соседними вершинами по диагонали ячейки графа, эквивалентный расстоянию
где Gside - вес ребра между соседними вершинами по стороне ячейки графа, эквивалентный расстоянию В, Gdiag - вес ребра между соседними вершинами по диагонали ячейки графа, эквивалентный расстоянию 
Вершина, соответствующая точке поля, в которой находится летательный аппарат, называется текущей вершиной. Соседние вершины, в которые из текущей по ребрам графа возможен переход, называются исследуемыми вершинами.
Для любой вершины графа, при ее исследовании для перехода, рассчитываются следующие параметры:
ΣG - коэффициент, эквивалентный пройденному в графе пути;
Н - коэффициент, отражающий оценку оставшегося в графе пути;
S - коэффициент, эквивалентный общей вероятности потери летательного аппарата при переходе в вершину;
F - коэффициент, отражающий общий вес пути, по которому осуществляется перемещение в вершину.
Пройденный в графе путь рассчитывается как сумма весов ребер от начальной вершины до исследуемой:

где:
 - текущая вершина, из которой производится расчет исследуемой;
- текущая вершина, из которой производится расчет исследуемой;
G(xi,j) - базовый вес ребра перехода из текущей вершины в исследуемую, соответствует весам Gside и Gdiag в зависимости от направления перехода;
 - коэффициент, эквивалентный пройденному в графе пути из начальной вершины в текущую.
- коэффициент, эквивалентный пройденному в графе пути из начальной вершины в текущую.
S(xi,j) - коэффициент опасности перемещения в исследуемую вершину. Если переход осуществляется в безопасной зоне - значение коэффициента принимается равным нулю.
Оставшийся путь не учитывает перемещение по ребрам и оценивается как кратчайшее расстояние между исследуемой и конечной вершинами в пространстве метрики графа:

Для (2) и (3) i и j - индексы исследуемой вершины.
Коэффициент общего веса пути к вершине вычисляется как:

где xi,j - исследуемая вершина.
Коэффициент S(xi,j) эквивалентен опасности перехода в исследуемую вершину. Для этого, в случае наличия опасности, он принимает значение согласно (4), суммирующееся с коэффициентами и увеличивающее вес ребра перехода в эту вершину, делая такой переход менее желательным. Если переход осуществляется в безопасную вершину - значение коэффициента принимается равным нулю, вес ребра не увеличивается. Расчет производится по следующей формуле:

L - коэффициент положения относительно ЛЗП. Необходим для увеличения веса ребра перехода в вершину, не находящуюся на ЛЗП, тем самым, определяя нахождение на ЛЗП приоритетным. Коэффициент равен 0, если точка лежит на ЛЗП, в противном случае его значение есть вес перехода по стороне ячейки для осуществления возврата летательного аппарата на ЛЗП - 
D0 - коэффициент опасности вершины, отражает наличие либо отсутствие опасности в принципе, принимает значения 0 или 1, соответственно.
М - коэффициент, отражающий вероятность потери летательного аппарата из-за расположения соответствующей ему точки поля в зоне метеообразования.
Рзрк - коэффициент, отражающий вероятность потери летательного аппарата из-за расположения соответствующей ему точки поля в зоне ПВО.
Dmin - коэффициент базового веса для ребер, по которым осуществляется переход в опасную вершину. Вес ребра входа в опасную вершину должен быть больше, чем сумма весов ребер в случае самого невыгодного обхода по безопасным участкам. Коэффициент Dmin заранее определен для каждой вершины, находящейся в опасной зоне, и позволяет сформировать маршрут обхода этой вершины (если такая возможна) вне зависимости от ее расположения на расчетном поле. Данный коэффициент принимает константное значение и одинаков для всех точек, находящихся в любой из опасных зон. Рассчитывается как:

Из-за характеристик графа, исключения возврата в предыдущую вершину и отклонения от ЛЗП более 45°, из текущей вершины переход возможен в три исследуемых. В случае нахождения на границе поля или при приближении к конечной вершине доступных переходов может быть два или один.
На фиг. 7 показаны возможные перемещения из текущей точки, а также значения F для исследуемых вершин.
Очевидно, что при отсутствии опасных зон и необходимости их обхода оптимальным маршрутом из начальной вершины в конечную будет путь по ЛЗП. Любое отклонение от ЛЗП увеличивает длину маршрута и делает его менее оптимальным.
На фиг. 8 показано существование некоторых опасных зон и два маршрута обхода, для которых отмечены текущие, исследуемые, а также начальная и конечная вершины и показано формирование коэффициентов H(xi,j), ΣG(xi,j), G(xi-1, j-1), G(xi,j) и F(xi,j).
Оба маршрута выполняют обход опасной зоны, при этом маршрут, отображенный красным цветом, является более оптимальным. Оптимальность маршрута отражается в меньшем значении коэффициента F, отслеживаемого с момента наибольшего отклонения и до конца маршрута.
Особенностью коэффициента F и его получения с учетом Н и G является его увеличение при отклонении от ЛЗП пропорционально отклонению. При возвращении на ЛЗП максимальное значение F сохраняется, отражая общую степень оптимальности маршрута.
Увеличение веса ребра перехода в вершину отражает нежелательность этого перехода. Учет суммы весов ребер оставшегося до конечной вершины пути H(xi,j) необходим, так как увеличивает сумму весов ребер пути и значение коэффициента F(xi,j) тем больше, чем больше маршрут отклоняется от ЛЗП и, соответственно, является менее оптимальным.
Для корректного решения задачи построения маршрута обхода опасных зон необходим учет максимально возможной протяженности маршрута в контексте возможности выполнения с учетом топливного ограничения. Возможны ситуации, в которых из-за недостатка топлива пространство для построения маршрута обхода ограничено или реализация обхода вовсе невозможна. В алгоритме, соответственно, реализован механизм ограничения доступных для маневров участков и исключения из расчета соответствующих вершин.
Во время построения маршрута обхода для учета ограничения по протяженности маршрута рассчитываются пройденный и оставшийся до конечной вершины пути. Расстояния соразмерны масштабу сетки расчетного поля и рассматриваются в «чистом» виде, то есть вес единичного перехода в любую вершину постоянен вне зависимости от ее нахождения в опасных зонах. То есть, вводится связь веса пути в графе и расстояния на расчетном поле.
Пути рассчитываются как суммы весов ребер перемещений по диагоналям и по сторонам ячеек поля.
Оставшийся путь примет вид:

Пройденный путь не будет учитывать опасность вершины и будет включать в себя только вес ребер пути до текущей вершины и переход в исследуемую:

Учет пути необходимо проводить параллельно построению маршрута обхода с учетом опасностей зон, то есть для каждой вершины дополнительно рассчитывать Еост(xi,j) и ΣЕпр(xi,j), а также коэффициент, эквивалентный топливным затратам на путь к точке:

Как было сказано ранее, в пространстве данной метрики увеличение F и, аналогично, Ет происходит при любом отклонении от ЛЗП и пропорционально отклонению увеличивает протяженность маршрута. Вводится коэффициент Етmax, эквивалентный максимальной протяженности маршрута, и, при Ет>Етmax, исключает из расчета в графе вершины, невозможные к выполнению. То есть при наличии ограничений по протяженности маршрута из расчетного поля будут исключаться некоторые точки, построение же маршрута будет выполняться на оставшейся области с сохранением требований по безопасности и минимизации длины маршрута обхода опасных зон.
Для построения маршрута обхода в графе используется:
- информация о текущем положении летательного аппарата, начальной и конечной точках расчетного поля, размерах поля и количестве точек N на стороне;
- информация о степени опасности метеообразований и зон ПВО для каждой точки расчетного поля;
- зарезервированное в памяти место под список доступных вершин - открытый, и список посещенных вершин - закрытый, элементами которых являются вершины графа со своими параметрами.
В случае инициализации способа формирования обхода и преодоления опасных зон беспилотным летательным аппаратом положения летательного аппарата назначается текущим.
1. Из текущей вершины для каждой из исследуемых вершин - вершин, в которые возможен переход - вычисляется значение коэффициентов H(xi,j), ΣG(xi,j), и F(xi,j), а также Еост(xi,j), ΣЕпр и Ет(xi,j).
2. Исследуемые вершины со своими параметрами добавляются в открытый список, если их там не было. Если Ет(xi,j) исследуемой вершины превышает Етmax, то такая вершина в открытый список не добавляется.
Текущая вершина для каждой из исследуемых сохраняется как родительская - вершина, из которой был совершен переход.
Если исследуемая вершина уже находится в открытом списке, то сравнивается значение рассчитанного коэффициента F с уже имеющимся.
Если новое значение F меньше, то для исследуемой вершины оно перезаписывается, и ее родительская вершина обновляется на текущую. Таким образом оказывается, что в эту исследуемую вершину был найден более оптимальный путь. Если новое значение F больше имеющегося, то перезапись не происходит.
3. Текущая вершина удаляется из открытого списка и добавляется в закрытый. В открытом списке выбирается вершина с наименьшим значением коэффициента F и назначается новой текущей.
4. Для новой текущей вершины пункты 2-4 повторяются до тех пор, пока конечная вершина не окажется в открытом списке, а текущая для нее вершина не будет добавлена в закрытый список.
5. Как только конечная вершина была добавлена в открытый список, производится процедура построения маршрута путем перехода по родительским вершинам из конечной в начальную.
Метод производит поиск по первому наилучшему совпадению на графе. Наилучшее совпадение реализуется за счет того, что маршрут строится через вершины, имеющие минимальный вес перехода по ребрам. Таким образом, от начальной до конечной вершины находится путь с наименьшим весом, при этом устанавливается полное соответствие критерию оптимальности.
При использовании единого расчетного поля на всем протяжении работы алгоритма обхода объем вычислений конечен и заранее определен, согласно первому ограничению. Максимальная алгоритмическая сложность алгоритма оценивается как O(E), где Е - количество ребер в графе.
Расчетное поле с количеством точек 3N(N-1)+1 имеет такое же количество вершин, все множество вершин имеет по три ребра, исключая левую и правую стороны расчетного поля с двумя ребрами и дальний край с одним единственным. Таким образом, общее количество ребер графа для расчетного поля данной конфигурации есть 9N2-15N+6.
Предложенный способ при формировании маршрута обхода и преодоления опасных зон беспилотным летательным аппаратом учитывает множество параметров, влияющих на возможный маршрут, благодаря чему строится наиболее кратчайший и безопасный маршрут.
Научная новизна заключается в решении досконально не исследованных прикладных инженерных задач, таких как: выполнение обхода опасных зон в автономном режиме, учет зон сложной формы и с неоднородной степенью опасности, преодоление опасных зон с минимизацией опасности при невозможности обхода, обход или преодоление нескольких опасных зон, в том числе перекрывающихся, а также построение маршрута обхода с учетом топливного ограничения.
Способ формирования маршрута обхода и преодоления опасных зон беспилотным летательным аппаратом обладает свойствами полноты, то есть маршрут находится всегда, когда он существует, и допустимости, то есть протяженность маршрута минимизирована всегда, когда это возможно.
При использовании единого расчетного поля на всем протяжении работы алгоритма обхода объем вычислений конечен и заранее определен.
Таким образом, способ формирования маршрута обхода и преодоления опасных зон беспилотным летательным аппаратом обеспечивает автоматическое построение кратчайшего и безопасного маршрут обхода и преодоления опасных зон беспилотным летательным аппаратом, без участия пилота, обеспечивает обход и преодоление беспилотным летательным аппаратом опасных зон или совокупности опасных зон, повышение безопасности полета беспилотного летательного аппарата и позволяет снизить информационную нагрузку на экипаж на наземном пункте управления. Беспилотный летательный аппарат при осуществлении способа обладает повышенными характеристиками автоматизации и эффективности выполнения задач.


Изобретение относится к способу формирования обхода и преодоления опасных зон беспилотным летательным аппаратом. Для формирования обхода и преодоления опасных зон производят автоматическое построение маршрута обхода и преодоления опасных зон из начальной точки в заданную конечную точку пути по известным координатам начальной и конечной точек, допустимому радиусу разворота, а также множеству опасных зон. Для этого формируют единичный квадрат на плоскости долгота-широта определенным образом в зависимости от линии пути и положения беспилотного летательного аппарата, формируют расчетное поле, представляющее собой сетку точек - возможных положений беспилотного летательного аппарата, путем добавления единичного квадрата на линии заданного пути определенным образом, переносят на сетку точек расчетного поля информацию об опасных зонах, присваивают точкам расчетного поля коэффициенты опасности, строят определенным образом маршрут обхода и преодоления опасных зон беспилотным летательным аппаратом от текущего положения летательного аппарата до конечной точки, лежащей на линии заданного пути. Обеспечивается повышение безопасности полета беспилотного летательного аппарата. 8 ил.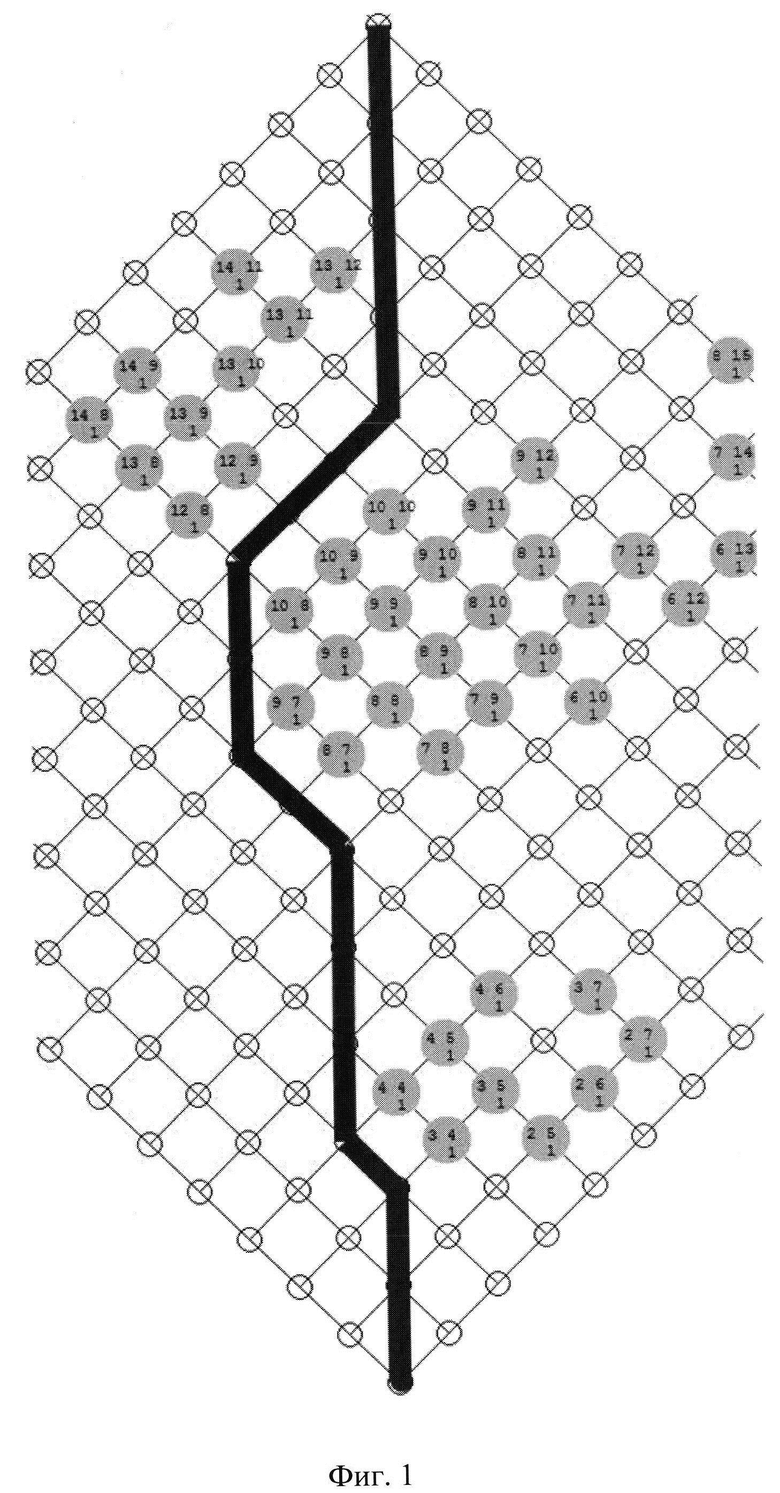
Способ формирования обхода и преодоления опасных зон беспилотным летательным аппаратом, при котором производят автоматическое построение маршрута обхода и преодоления опасных зон из начальной точки в заданную конечную точку пути по известным координатам начальной и конечной точек, допустимому радиусу разворота, а также множеству опасных зон,
отличающийся тем, что при инициализации построения маршрута на плоскости долгота-широта формируют единичный квадрат, при этом если беспилотный летательный аппарат находится на линии заданного пути, то его местоположение принимается вершиной единичного квадрата зоны маршрута, а диагональ единичного квадрата зоны маршрута лежит на линии заданного пути в направлении конечной точки, если беспилотный летательный аппарат находится вне линии заданного пути, то вершиной единичного квадрата зоны маршрута принимается точка пересечения линии заданного пути с прямой, проведенной от беспилотного летательного аппарата к линии заданного пути под углом 45°, при этом выбирается точка пересечения, которая является ближайшей к пройденному промежуточному пункту маршрута, а диагональ единичного квадрата зоны маршрута лежит на линии заданного пути в направлении конечной точки, при этом единичный квадрат зоны маршрута имеет на своей стороне N точек - возможных положений беспилотного летательного аппарата, и состоит из квадратных ячеек, при этом на одной стороне квадрата расположено (N-1) ячеек, при этом сторона ячейки В (м), а сторона квадрата А=(N-1)*В(м),
формируют расчетное поле, представляющее собой сетку точек - возможных положений беспилотного летательного аппарата, путем добавления единичного квадрата на линии заданного пути, таким образом, что диагональ единичного квадрата зоны маршрута лежит на линии заданного пути в направлении конечной точки, и соединения вершин квадратов прямыми, параллельными линии заданного пути,
полученную информационно-управляющей системой комплекса бортового оборудования беспилотного летательного аппарата информацию об опасных зонах, таких как зоны противовоздушной обороны и зоны метеообразований, переносят на сетку точек расчетного поля,
присваивают точкам расчетного поля коэффициенты опасности,
из точек расчетного поля и соответствующих точкам ребер формируют направленный взвешенный граф, представляющий собой множество вершин с порядковыми номерами - индексами вида [I, J], соединенных ребрами - сторонами ячеек единичного квадрата, с направлением возможных переходов между вершинами, при этом для каждой вершины графа рассчитываются следующие параметры:
ΣG - коэффициент, эквивалентный пройденному в графе пути;
Н - коэффициент, отражающий оценку оставшегося в графе пути;
S - коэффициент, эквивалентный общей вероятности потери летательного аппарата при переходе в вершину;
F - коэффициент, отражающий общий вес пути, по которому осуществляется перемещение в вершину,
при этом пройденный в графе путь рассчитывают как сумма весов ребер от начальной вершины до исследуемой:

где:
 - текущая вершина, из которой производится расчет исследуемой вершины;
- текущая вершина, из которой производится расчет исследуемой вершины;
G(xi,j) - базовый вес ребра перехода из текущей вершины в исследуемую, соответствует весам Gside и Gdiag в зависимости от направления перехода;
 - коэффициент, эквивалентный пройденному в графе пути из начальной вершины в текущую;
- коэффициент, эквивалентный пройденному в графе пути из начальной вершины в текущую;
S(xi,j) - коэффициент опасности перемещения в исследуемую вершину,
рассчитывают кратчайший оставшийся путь между исследуемой и конечной вершинами, который не учитывает перемещение по ребрам:
 ,
,
при этом коэффициент общего веса пути к вершине вычисляется как
F(xi,j)=Н(xi,j)+ΣG(xi,j),
где xi,j - исследуемая вершина,
оставшийся путь рассчитывают по формуле
Еост(xi,j)=(⏐i-j⏐)*Gside+(N-max(i,j))*Gdiag,
пройденный путь рассчитывают по формуле
 ,
,
для каждой вершины дополнительно рассчитываются
Ет=(xi,j)=Еост(xi,j)+ΣGпр(xi,j),
строят маршрут обхода и преодоления опасных зон беспилотным летательным аппаратом от текущего положения летательного аппарата до конечной точки, лежащей на линии заданного пути, итерационно через вершины графа с наименьшими значениями F(xi,j) коэффициента общего веса пути к вершине.
| СПОСОБ ТРАЕКТОРНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ С ОБЛЕТОМ ЗОН С НЕБЛАГОПРИЯТНЫМИ МЕТЕОРОЛОГИЧЕСКИМИ УСЛОВИЯМИ | 2011 |
|
RU2490170C2 |
| УСТРОЙСТВО И СПОСОБ АВАРИЙНОЙ СИГНАЛИЗАЦИИ ПРЯМОГО ВЕЩАНИЯ | 2013 |
|
RU2654660C2 |
| CA 2996709 A1, 02.03.2017 | |||
| US 6401038 B2, 04.06.2002 | |||
| US 20210333794 A1, 28.10.2021. | |||
