Настоящее изобретение относится к управлению гидростатическими трансмиссиями, в частности, гидростатическими трансмиссиями с гидравлической машиной типа объемной машины, работающей в замкнутом контуре, на транспортных средствах с четырьмя ведущими колесами.
Изобретение относится к автотранспортным средствам с четырьмя ведущими колесами на смешанной механической и гидравлической тяге, в которых колесная ось приводится во вращение гидравлической машиной при помощи гидравлической энергии, отбираемой на дифференциале другой колесной оси, которую приводит во вращение тепловой или электрический двигатель.
На передней оси может применяться механическая трансмиссия, а на задней оси - гидростатическая трансмиссия, однако изобретение можно применять в одинаковых условиях на обратной конструкции, если только рабочий объем насоса и рабочий объем двигателя являются одинаковыми.
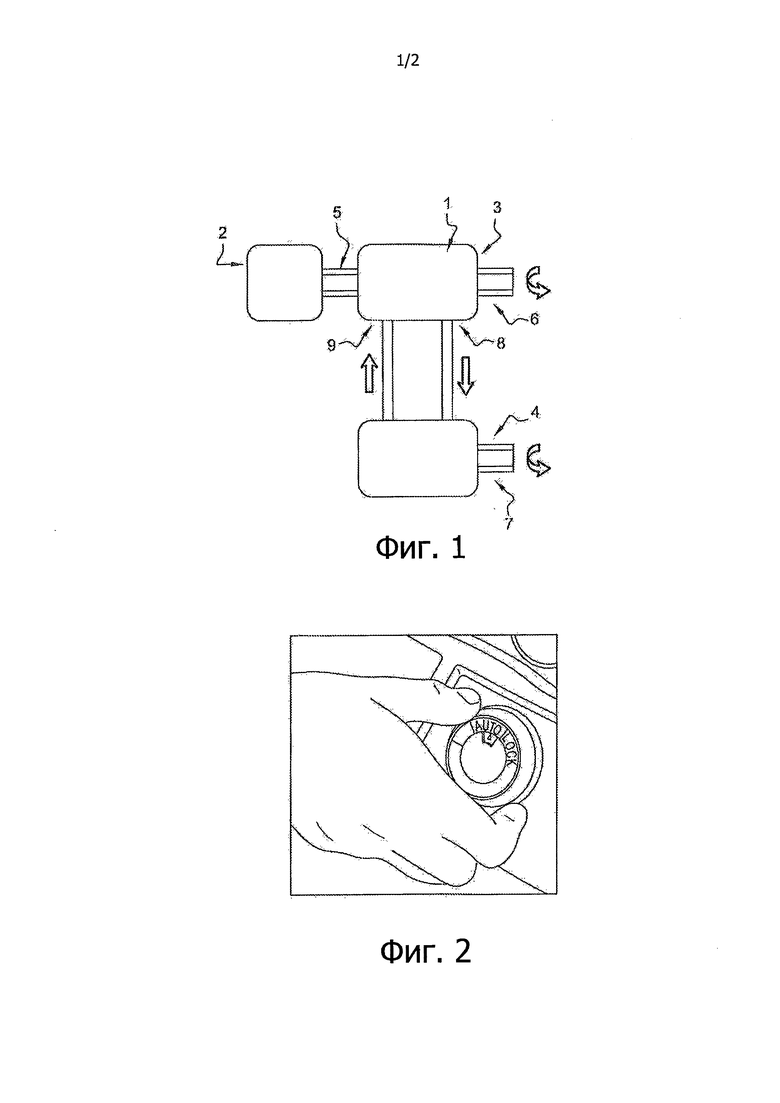
На фиг. 1 представлена принципиальная схема соответствующей кинематической цепи. На этой схеме показаны тепловой, электрический или гибридный приводной двигатель 2 транспортного средства, гидравлический насос 3 и гидравлический двигатель 4. Приводной двигатель 2 вращает насос 2 через общий трансмиссионный вал 5. Ось 6, приводимая во вращение приводным двигателем 2, соединена с первой колесной осью, например, с передней колесной осью. Гидравлический двигатель 4 вращает вторую ось 7, соединенную с второй колесной осью, например, с задней колесной осью. Два гидравлических канала 8, 9 соединяют двигатель 4 и насос 3. Характеристики гидравлического контура (рабочий объем насоса, рабочий объем двигателя, внутренняя утечка, регулируемая утечка, потеря напора, …) определяют эффективность трансмиссии этого типа при слабом сцеплении с дорогой и ее совместимость с маневрами при сильном сцеплении.
Гидростатическая трансмиссия обладает способностью связывать кинематически заднюю колесную ось с передней колесной осью: средняя скорость задней колесной оси кинематически равна средней скорости передней колесной оси. На прямой линии задние колеса вращаются с такой же скоростью, что и передние колеса, и следуют по прямолинейной траектории. На вираже задние колеса проходят меньший путь, чем передние колеса.
Обычно трансмиссию регулируют таким образом, чтобы обеспечить максимальную эффективность при слабом сцеплении. На грунте с сильным сцеплением условие виража создает особый эффект, который связан с взаимосвязью скоростей обеих колесных осей и с поведением гидростатической трансмиссии: этот особый эффект на вираже (особенно на крутом вираже) проявляется в том, что давление трансмиссии повышается и заставляет колесную ось с более слабым сцеплением вращаться со скоростью другой колесной оси за счет проскальзывания колес колесной оси с меньшим сцеплением. В этой ситуации повышение давления гидростатической трансмиссии оказывается бесполезным и приводит к появлению шума и трений шин и вращающихся механических элементов. Кроме того, на вираже при движении по дороге со слабым сцеплением добавляется проблема потери бокового направления колесной оси с меньшим сцеплением по причине пробуксовки ее колес.
Из публикации WO 2010/1112684 известно устройство управления системой распределения крутящего момента между двумя колесными осями, содержащее трехпозиционный переключатель, который позволяет водителю выбирать первый режим частичной передачи мощности на задний мост, второй режим полной передачи мощности на задний мост и третий режим отсутствия передачи крутящего момента на задний мост. Это устройство объединяет отдельный тип гидравлической работы с каждым выбираемым режимом трансмиссии.
Задачей настоящего изобретения является упрощение управлением гидростатической трансмиссии.
Изобретение предусматривает управление гидростатической трансмиссией между активированным состоянием, в котором гидравлический момент передается на вторую колесную ось, и неактивным состоянием, в котором передача прекращается, и одновременно обеспечивает удовлетворительный ответ на ожидания пользователя по каждому из режимов, который он может выбрать.
В частности, изобретение предусматривает, что приведение в действие или выключение гидростатической трансмиссии основаны на отслеживании условий сцепления колес транспортного средства и угла поворота его рулевого колеса.
В предпочтительном варианте осуществления изобретения управление определено выбором водителя между устойчивым режимом с двумя ведущими колесами, устойчивым автоматическим режимом, когда гидростатическую трансмиссию можно выключить или привести в действие в зависимости от условий движения транспортного средства, и неустойчивым режимом, в котором активируют гидростатическую трансмиссию.
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания не ограничительного варианта его осуществления со ссылками на прилагаемые чертежи, на которых представлено следующее:
фиг. 1 - упрощенная схема гидростатической трансмиссии;
фиг. 2 - работа переключателя режима;
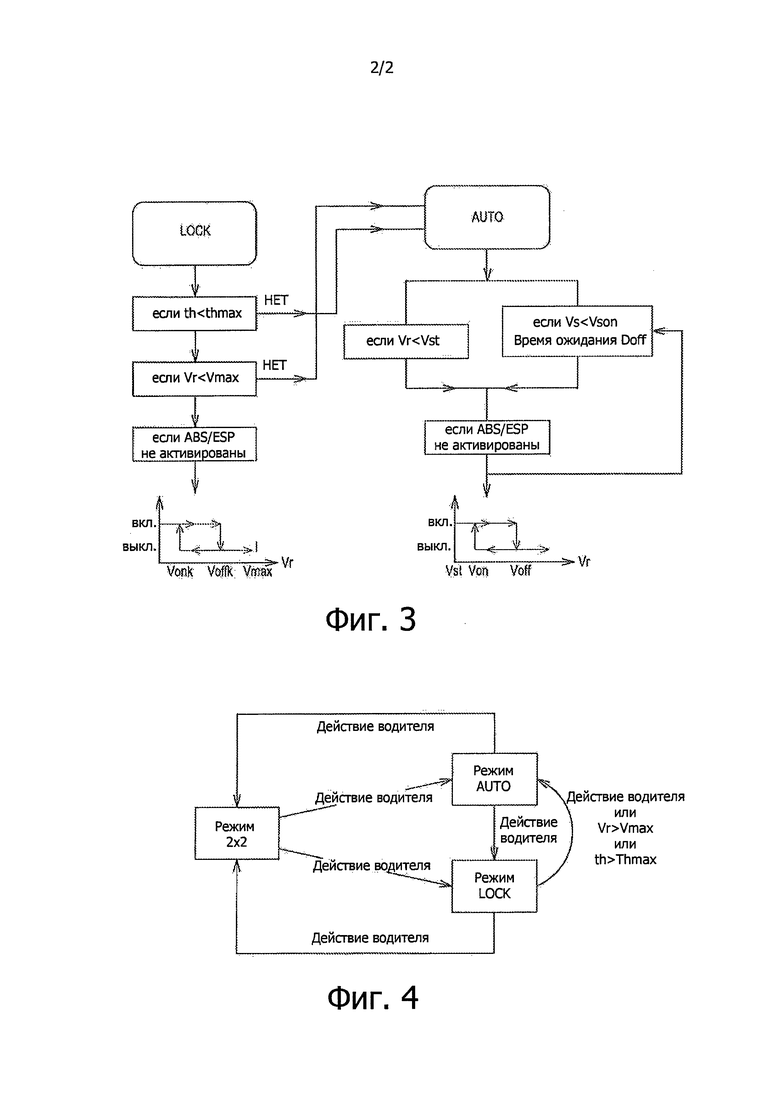
фиг. 3 - логическая схема управления трансмиссией;
фиг. 4 - схема управления режимами работы и кнопкой переключателя.
В являющейся объектом изобретения гидростатической трансмиссии транспортного средства с четырьмя ведущими колесами на смешанной механической и гидравлической тяге, показанной на фиг. 1, транспортное средство приводится в движение механически приводным двигателем 2 транспортного средства. Вторая колесная ось приводится в движение гидростатической трансмиссией 1, содержащей гидравлическую машину 4, которая использует энергию, отбираемую гидравлическим насосом 3 на дифференциале первой колесной оси.
Водитель может выбирать между тремя режимами работы, называемыми «4×2» (два ведущих колеса), "AUTO" (автоматический) и "4×4" или "LOCK" (блокировка), при помощи вращающейся кнопки трехпозиционного переключателя (см. фиг. 2). Из соображений безопасности два первых положения кнопки являются устойчивыми, тогда как управление в режиме LOCK является импульсным. Автомат управления гидростатической трансмиссией 1 следует командам водителя, который может выбрать одно из этих трех положений. Наконец, возвращение из режима LOCK в режим AUTO может быть автоматическим или ручным.
Настоящим изобретением предложена особая логическая схема управления режимами AUTO и LOCK кнопки выбора. Эта схема представлена на фиг. 3. Она показывает условия включения и выключения трансмиссии 1 в этих двух особых положениях в зависимости от различных параметров. С другой стороны, режим 4×2 всегда включается автоматически, как аварийный режим, в случае отказа гидравлической системы. Кроме того, режим LOCK может включаться только по запросу водителя путем поворота кнопки, тогда как режим AUTO может включаться либо водителем, либо по умолчанию, так как режим LOCK не остается активным постоянно.
Автомат может учитывать следующие параметры:
- Vmax: скорость аннулирования режима LOCK (например, 50 км/ч),
- Th: температура масла в °С,
- Thmax: максимальная допустимая температура масла (например, 105°С),
- Vf: средняя скорость передней колесной оси,
- Vr: средняя скорость задней колесной оси,
- Vrc: средняя скорость задней колесной оси со скорректированным эффектом кривой,
- Vs=Vf-Vr: среднее буксование задней колесной оси,
- Vson: порог буксования (например, 8 об/мин), требующий приведения в действие системы в режиме AUTO,
- Av: угол поворота рулевого колеса (°),
- Von: порог скорости, реактивирующий систему при замедлении, в км/ч (в зависимости от Th и Av),
- Voff: порог скорости, деактивирующий систему при ускорении, в км/ч (в зависимости от Th и Av),
- Vonk: порог скорости, реактивирующий систему при замедлении, в км/ч (например, 20 км/ч),
- Voffk: порог скорости, деактивирующий систему при ускорении, в км/ч (например, 30 км/ч),
- Doff: время перед деактивацией системы в режиме AUTO при отсутствии обнаружения буксования,
- Vst: порог скорости задней колесной оси, ниже которого транспортное средство считается остановившимся.
Это последнее измерение является факультативным. Оно позволяет преодолеть возможное отсутствие реакции системы на буксование при трогании с места после остановки.
Логическая схема управления включением и выключением гидростатической трансмиссии в режиме AUTO или в режиме LOCK представлена на фиг. 3. Во всех случаях гидростатическую трансмиссию активируют, только если системы коррекции траектории (ESP) и обеспечения торможения (ABS) являются неактивными.
В режиме LOCK система является активной, пока задние колеса вращаются со скоростью ниже порога Voffk (Vr<Voffk), например, 30 км/ч. Ниже этого значения система деактивируется. Она возвращается в режим LOCK, только если скорость задних колес:
a) не превышает порог Vmax выхода из режима LOCK, и
b) падает ниже порога Vonk повторного включения, например, 20 км/ч.
В режиме AUTO система активируется, если:
а) средняя разность скорости Vs между передней и задней колесными осями, скорректированная на теоретическое значение разности, связанной с условиями угла поворота рулевого колеса, превышает порог Vson, и
b) скорость на задних колесах Vr меньше заданного значения Voff, которое зависит от угла поворота рулевого колеса и от температуры масла.
В режиме AUTO гидростатическая трансмиссия деактивируется
a) при включении контакта,
b) в отсутствие обнаружения разности скорости Vs, превышающей порог Vson, между двумя колесными осями в течение времени ожидания Doff, или
c) при превышении пороговой скорости Voff на задних колесах, которая зависит от угла поворота рулевого колеса Av и от температуры масла Th.
На фиг. 4 представлена схема управления для активации или деактивации гидростатической трансмиссии в зависимости от поворота кнопки выбора водителем между тремя положениями 4×2, AUTO или LOCK:
Трансмиссия переходит в режим AUTO при:
a) выключении контакта транспортного средства, или
b) действии водителя, или
c) превышении пороговой скорости на задних колесах, Vr>Vmax (например, 50 км/ч), или
d) превышении заданной температуры масла Th>Thmax (например, 105°С).
Режим AUTO является устойчивым или остаточным при выключении и повторном включении контакта транспортного средства. Его деактивация происходит не в зависимости от условий вождения, а только по запросу водителя.
Режим LOCK устанавливается по запросу водителя из режима 4×2 или из режима AUTO. В установившемся режиме LOCK гидравлический момент, выдаваемый гидростатической трансмиссией на колеса транспортного средства, можно корректировать при помощи потока масла, зависящего от разности скорости между двигателем и гидравлическим насосом, чтобы уменьшить буксование.
Изобретение относится к трансмиссиям транспортных средств. В способе управления гидростатической трансмиссией транспортного средства с четырьмя ведущими колесами на смешанной механической и гидравлической тяге управление гидростатической трансмиссией определяется выбором водителя между устойчивым режимом с двумя ведущими колесами (4×2), устойчивым автоматическим режимом (AUTO) и неустойчивым режимом блокировки (LOCK), в котором активируют гидростатическую трансмиссию. В режиме (AUTO) гидростатическую трансмиссию можно выключить или привести в действие в зависимости от условий движения транспортного средства. Упрощается управление гидростатической трансмиссией. 9 з.п. ф-лы, 4 ил.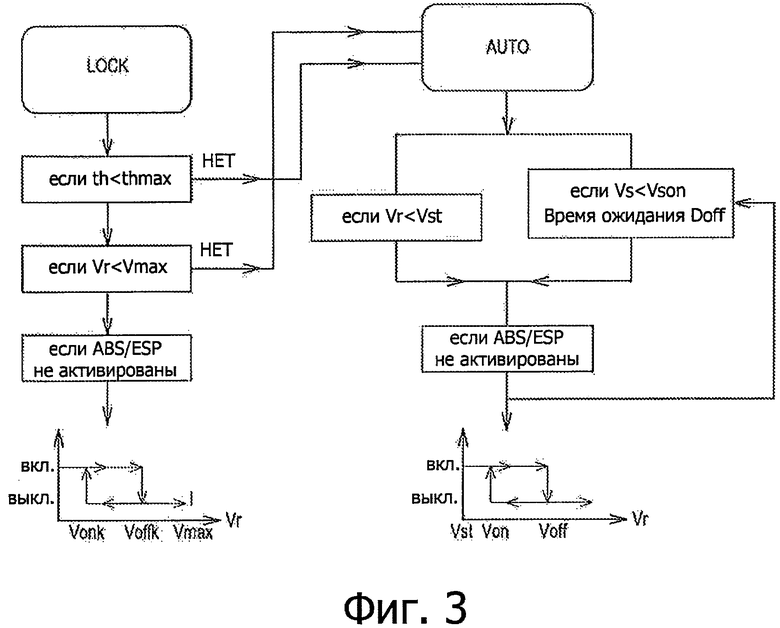
1. Способ управления гидростатической трансмиссией транспортного средства с четырьмя ведущими колесами на смешанной механической и гидравлической тяге, в котором первая колесная ось приводится в движение механически приводным двигателем (2) транспортного средства и вторая колесная ось приводится в движение гидростатической трансмиссией (1), содержащей гидравлическую машину (4), приведение в действие или остановка которой основаны на отслеживании условий сцепления колес транспортного средства и угла поворота его рулевого колеса и которая использует энергию, отбираемую гидравлическим насосом (3) на дифференциале первой колесной оси, отличающийся тем, что управление гидростатической трансмиссией (1) определяется выбором водителя между устойчивым режимом с двумя ведущими колесами (4×2), устойчивым автоматическим режимом (AUTO), в котором гидростатическую трансмиссию можно выключить или привести в действие в зависимости от условий движения транспортного средства, и неустойчивым режимом блокировки (LOCK), в котором активируют гидростатическую трансмиссию.
2. Способ по п. 1, отличающийся тем, что автоматический режим (AUTO) является остаточным при выключении и повторном включении контакта транспортного средства, и тем, что он не деактивируется в зависимости от условий движения, а только при выборе другого режима работы (4×2, LOCK) водителем.
3. Способ по п. 1, отличающийся тем, что режимы работы гидростатической трансмиссии (1) выбирают при помощи вращающейся кнопки выбора с двумя устойчивыми положениями для режимов (4×2) и (AUTO) и с одним импульсным положением для режима (LOCK).
4. Способ по п. 3, отличающийся тем, что гидростатическая трансмиссия (1) переходит в режим (AUTO) при:
a) выключении контакта транспортного средства, или
b) действии водителя, или
c) превышении пороговой скорости на задних колесах, или
d) при превышении заданной температуры масла.
5. Способ по п. 1, отличающийся тем, что гидростатическая трансмиссия активируется в автоматическом режиме (AUTO), если:
а) средняя разность скорости (Vs) между передней и задней колесными осями, скорректированная на теоретическое значение разности, связанной с условиями угла поворота рулевого колеса, превышает порог (Vson), и
b) скорость на задних колесах (Vr) меньше заданного значения (Vst), которое зависит от угла поворота рулевого колеса и от температуры масла.
6. Способ управления по п. 1, отличающийся тем, что гидростатическая трансмиссия (1) деактивируется в автоматическом режиме (AUTO):
a) при включении контакта, или
b) в отсутствие обнаружения разности скорости (Vs) между двумя колесными осями в течение времени ожидания (Doff), или
c) при превышении пороговой скорости (Voff) на задних колесах, которая зависит от угла поворота рулевого колеса (Av) и от температуры масла (Th).
7. Способ по п. 6, отличающийся тем, что гидростатическую трансмиссию (1) можно реактивировать, только если скорость задних колес (Vr) падает ниже порога (Von) повторного включения, меньшего (Voff), который зависит также от углов поворота рулевого колеса (Av) и от температуры масла (Th).
8. Способ по п. 1, отличающийся тем, что система активирована в режиме блокировки (LOCK), пока задние колеса вращаются со скоростью (Vr) ниже порога (Voffk).
9. Способ по п. 8, отличающийся тем, что, если скорость задних колес (Vr) превышает порог (Voffk) в режиме блокировки (LOCK), гидростатическая трансмиссия (1) деактивируется и включается опять, только если скорость задних колес:
a) не превышает порог выхода (Vmax), и
b) падает ниже порога повторного включения (Vonk).
10. Способ по п. 1, отличающийся тем, что гидростатическая трансмиссия (1) приводится в действие, только если системы коррекции траектории (ESP) и обеспечения торможения (ABS) не являются активными.
| Регулятор частоты энергоагрегата | 1979 |
|
SU864482A1 |
| US 2002032512 A1, 14.03.2002 | |||
| US 2003234124 A1, 25.12.2003 | |||
| WO 2014048841 A2, 03.04.2014. | |||

