Область техники, к которой относится изобретение
Изобретение относится к способу управления гидростатической трансмиссией движущегося автотранспортного средства, при этом автотранспортное средство содержит:
- гидростатическую трансмиссию, содержащую гидравлический насос для создания давления гидравлической жидкости и гидравлический двигатель, соединенный с гидравлическим насосом через гидравлический контур;
- первое фрикционное сцепление с гидравлическим приводом, предназначенное для соединения гидравлического насоса с первыми колесами транспортного средства;
- второе первое фрикционное сцепление с гидравлическим приводом, предназначенное для соединения гидравлического двигателя со вторыми колесами транспортного средства;
- электрический насос, который управляет одновременно первым сцеплением и вторым сцеплением между полностью сомкнутым состоянием и полностью разомкнутым состоянием посредством управления давлением гидравлической жидкости.
Уровень техники
Как правило, автотранспортные средства с двигателем внутреннего сгорания оснащены электрической аккумуляторной батареей, которая дает электрическую мощность, позволяющую питать различные электрические агрегаты, находящиеся на борту транспортного средства.
Электрические агрегаты включают в себя, например, обогревательные приборы, предназначенные для обогрева некоторых частей транспортного средства или его салона.
В дальнейшем тексте описания и в формуле изобретения электрическая аккумуляторная батарея будет обозначаться термином «батарея».
Кроме своих других характеристик, батарея имеет максимальную электрическую мощность, которую она может выдавать в течение определенного времени. Как правило, батарея выдает постоянное номинальное напряжение, при этом выдаваемый ток может меняться в зависимости от потребностей транспортного средства. Таким образом, максимальную мощность, которую может выдавать батарея, обычно выражают в виде максимальной силы тока, называемой также «пиковым током».
Кроме того, некоторые транспортные средства с четырьмя ведущими колесами, называемые также «транспортными средствами 4х4», оснащены гидростатической трансмиссией, которая обеспечивает передачу крутящего момента, производимого двигателем внутреннего сгорания транспортного средства, на колеса, которые в обычном режиме не являются ведущими. Для этого гидростатическая трансмиссия содержит гидравлический насос, предназначенный для соединения с ведущими колесами транспортного средства, которые приводятся во вращение непосредственно тепловым двигателем, и гидравлический двигатель, предназначенный для соединения с не ведущими колесами транспортного средства.
Гидравлический насос и гидравлический двигатель соединены, каждый, с соответствующими колесами через фрикционное сцепление. Каждым из двух фрикционных сцеплений управляет гидравлический привод. Гидравлическими приводами управляет электрический насос. Управление сцеплениями происходит между сомкнутым состоянием, в котором они соединяют без проскальзывания колеса с гидростатической трансмиссией, и разъединенным состоянием, в котором гидростатическая трансмиссия полностью отсоединена от колес транспортного средства. Сцепления могут также занимать промежуточное состояние, в котором они обеспечивают частичное соединение с проскальзыванием между колесами и гидростатической трансмиссией.
Гидравлическими приводами управляет электрический насос, который создает давление гидравлической жидкости, управляющей гидравлическими приводами. Давление гидравлической жидкости по существу пропорционально электрической мощности, которая питает электрический насос.
Смыкание сцеплений обеспечивается, когда давление гидравлической жидкости достигает или превышает определенное давление смыкания. При значении ниже этого давления смыкания смыкание сцеплений не обеспечивается. При этом каждое сцепление может неконтролируемо занимать любое из своих состояний.
Гидростатической трансмиссией может управлять водитель или система в «рабочем» режиме, в котором электрический насос получает электрическую мощность, превышающую определенную электрическую мощность смыкания. Электрический насос потребляет электрическую мощность, необходимую, чтобы давление гидравлической жидкости достигло или превысило давление смыкания.
Гидростатической трансмиссией может управлять водитель или система в «нерабочем» режиме, в котором электрический насос не получает никакой электрической мощности. Таким образом, гидростатическая трансмиссия оказывается полностью отсоединенной от колес транспортного средства.
В некоторых условиях электрические агрегаты транспортного средства потребляют электрическую мощность, которая не позволяет электрическому насосу получать достаточную электрическую мощность для достижения давления смыкания без превышения максимальной электрической мощности, которую может выдавать батарея. Например, это относится к случаю, когда транспортное средство используют в очень суровых зимних условиях, например, когда наружная окружающая температура опускается ниже -10°С.
До настоящего времени управление гидростатической трансмиссией производили либо в «рабочем» режиме, либо в «нерабочем» режиме в зависимости от имеющейся электрической мощности, чтобы обеспечивать работу электрического насоса и различных электрических агрегатов.
Раскрытие сущности изобретения
Изобретением предложен способ управления гидростатической трансмиссией автотранспортного средства, при этом автотранспортное средство содержит:
- гидростатическую трансмиссию, содержащую гидравлический насос для создания давления гидравлической жидкости и гидравлический двигатель, соединенный с гидравлическим насосом через гидравлический контур;
- первое фрикционное сцепление с гидравлическим приводом, предназначенное для соединения гидравлического насоса с первыми колесами транспортного средства;
- второе фрикционное сцепление с гидравлическим приводом, предназначенное для соединения гидравлического двигателя с вторыми колесами транспортного средства;
- электрический насос, который управляет одновременно первым сцеплением и вторым сцеплением между полностью сомкнутым состоянием и полностью разомкнутым состоянием посредством управления давлением гидравлической жидкости;
- электронный блок управления, который управляет электрическим питанием электрического насоса;
- источник электрической мощности, выполненный с возможностью выдавать максимальную электрическую мощность в электрический насос;
при этом гидростатическая трансмиссия выполнена с возможностью работать:
- в рабочем режиме, в котором электронный блок управления питает электрический насос электрической мощностью, превышающей или равной определенной электрической мощности смыкания, для перевода сцеплений в их полностью сомкнутое состояние;
- в нерабочем режиме, в котором электронный блок управления питает электрический насос электрической мощностью, меньшей или равной определенной электрической мощности размыкания, для перевода сцеплений в их разъединенное состояние;
согласно изобретению, гидростатическая трансмиссия выполнена с возможностью работать в дежурном режиме, в котором электронный блок управления питает электрический насос промежуточной электрической мощностью в значении между электрической мощностью размыкания и электрической мощностью смыкания.
Согласно другим отличительным признакам изобретения:
- источник электрической мощности питает также различные агрегаты транспортного средства, при этом промежуточную электрическую мощность определяют таким образом, чтобы общая электрическая мощность, потребляемая агрегатами и электрическим насосом, была меньше или равна максимальной электрической мощности;
- промежуточную электрическую мощность определяют таким образом, чтобы общая электрическая мощность, потребляемая агрегатами транспортного средства, была по существу равна максимальной электрической мощности;
- электрический насос создает также давление гидравлической жидкости гидравлического контура гидростатической трансмиссии;
- переход в дежурный режим осуществляют в зависимости от определенных рабочих параметров транспортного средства;
- транспортное средство оснащено тяговым двигателем, который приводит во вращение первые колеса транспортного средства;
- дежурный режим запускают, когда удовлетворено по меньшей мере одно из условий из нижеследующего не ограничительного списка:
- водитель затребовал применение рабочего режима;
- скорость перемещения транспортного средства находится в заранее определенном интервале;
- режим тягового двигателя ниже определенного порога;
- крутящий момент, затребованный от тягового двигателя, превышает определенный порог;
- педаль акселератора транспортного средства нажата сверх определенного порога;
- температура гидравлической жидкости ниже определенной температуры.
- значение электрической мощности, питающей электрический насос, задает электронный блок управления посредством широтно-импульсной модуляции циклического электрического сигнала, который питает электрический насос и каждый цикл которого содержит импульс, имеющий определенную интенсивность и/или плоский участок нулевой интенсивности;
- импульсы передаются циклами определенного периода, например, составляющего от 10 до 20 кГц;
- электронный блок управления изменяет определенную электрическую мощность, действуя на циклическое соотношение между продолжительностью импульса и периодом циклического электрического сигнала;
- когда гидростатическая трансмиссия работает в рабочем режиме, электронный блок управления выдает электрический сигнал с циклическим соотношением, превышающим или равным определенному верхнему порогу, например, 1;
- когда гидростатическая трансмиссия работает в нерабочем режиме, электронный блок управления выдает электрический сигнал с циклическим соотношением, меньшим или равным определенному нижнему порогу, например, 0;
- когда гидростатическая трансмиссия работает в дежурном режиме, циклическое соотношение задают по промежуточному значению, находящемуся между нижним порогом и верхним порогом;
- промежуточное значение циклического соотношения зависит от комбинации активированных электрических агрегатов;
- в варианте различные задаваемые значения промежуточной электрической мощности записаны в памяти электронного блока управления в таблице соответствия, в которой каждой комбинации активированных агрегатов соответствует определенное значение промежуточной мощности.
Краткое описание чертежей
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи.
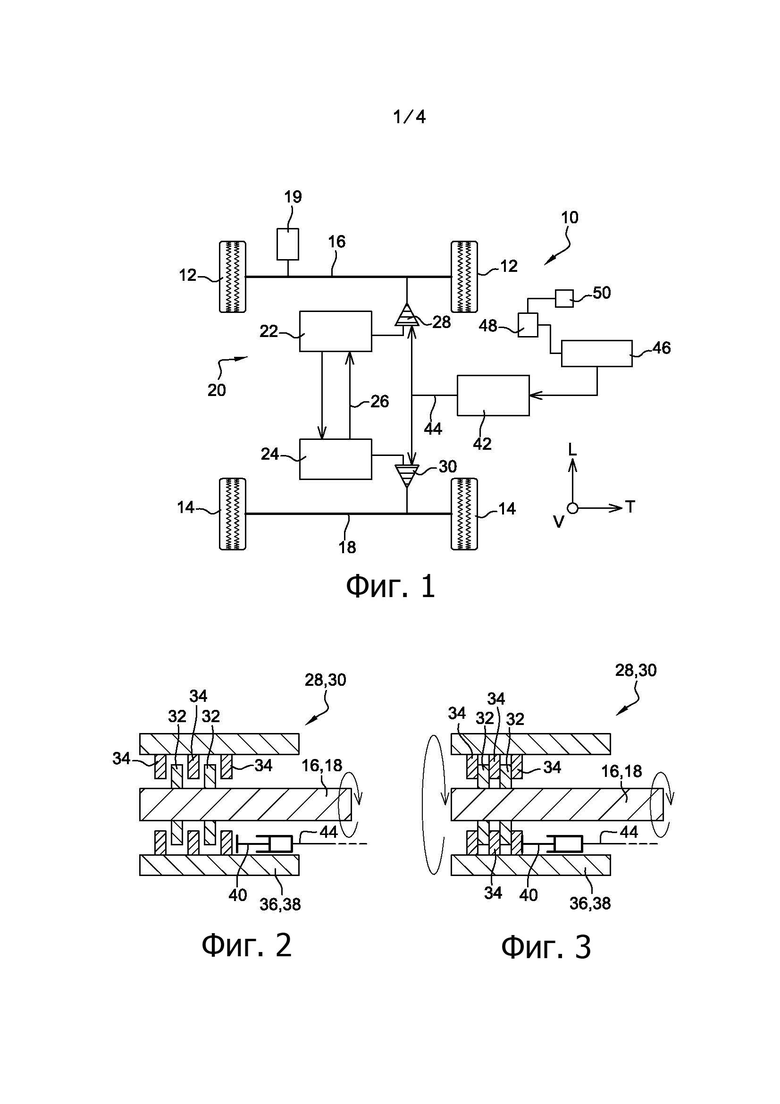
На фиг. 1 схематично показано автотранспортное средство, оснащенное гидростатической трансмиссией в соответствии с изобретением, вид сверху;
на фиг. 2 показано сцепление для соединения между элементом гидростатической трансмиссии и валом колес транспортного средства, при этом сцепление имеет полностью разомкнутое состояние, вид в осевом разрезе;
на фиг. 3 показан вид, аналогичный фиг. 2, иллюстрирующий сцепление в полностью сомкнутом состоянии;
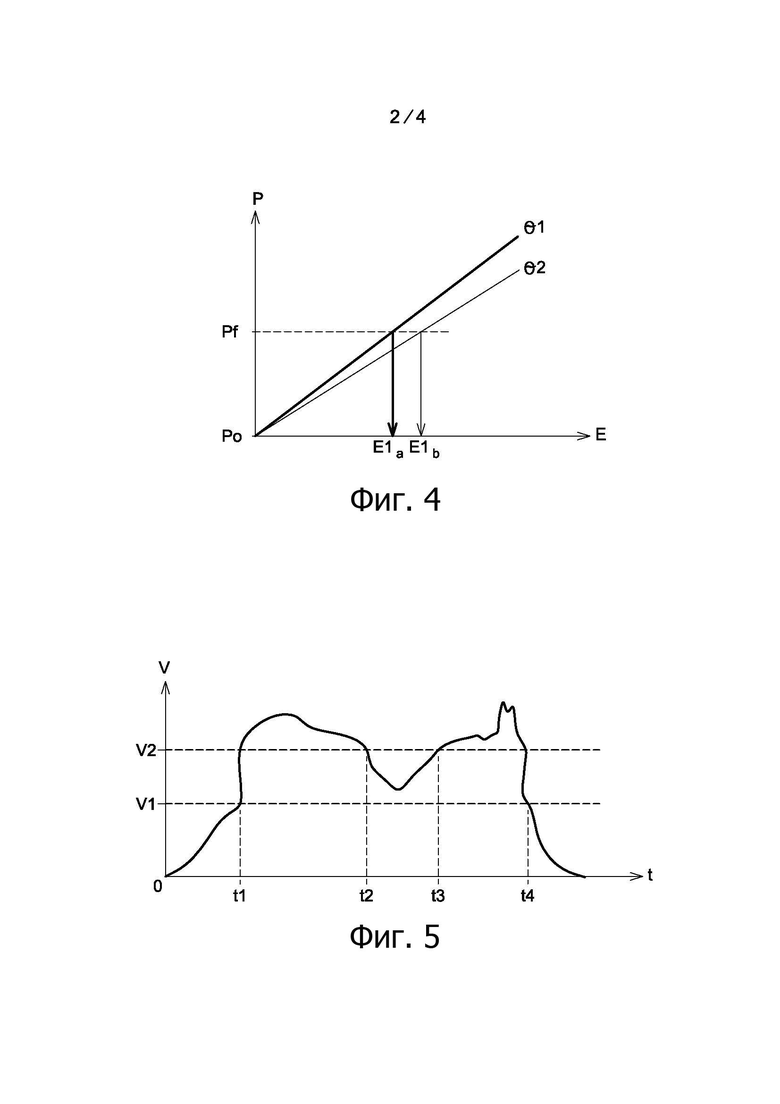
на фиг. 4 представлен график изменения давления гидравлической жидкости, управляющей сцеплениями, в зависимости от электрической мощности, подаваемой на электрический насос, для двух значений температуры гидравлической жидкости;
на фиг. 5 представлен график изменения скорости транспортного средства в зависимости от времени;
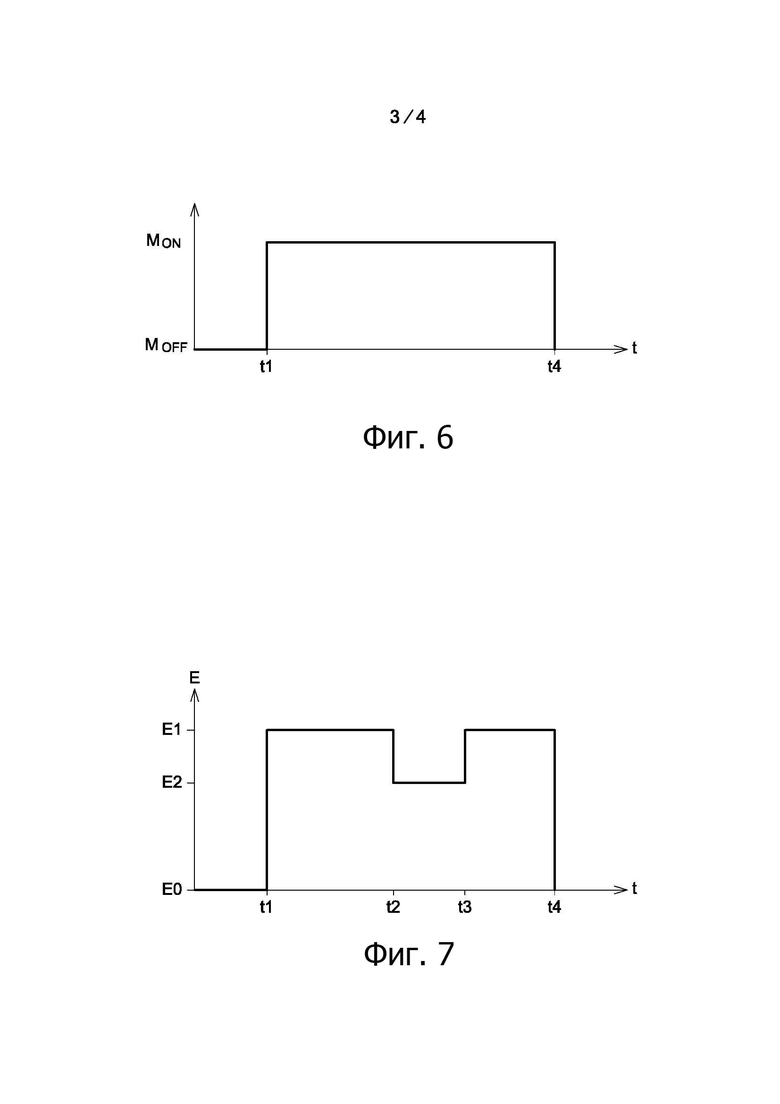
на фиг. 6 представлен график изменения запроса водителя на применение рабочего режима гидростатической трансмиссии в зависимости от времени;
на фиг. 7 представлен график изменения значения электрической мощности питания электрического насоса в зависимости от времени;
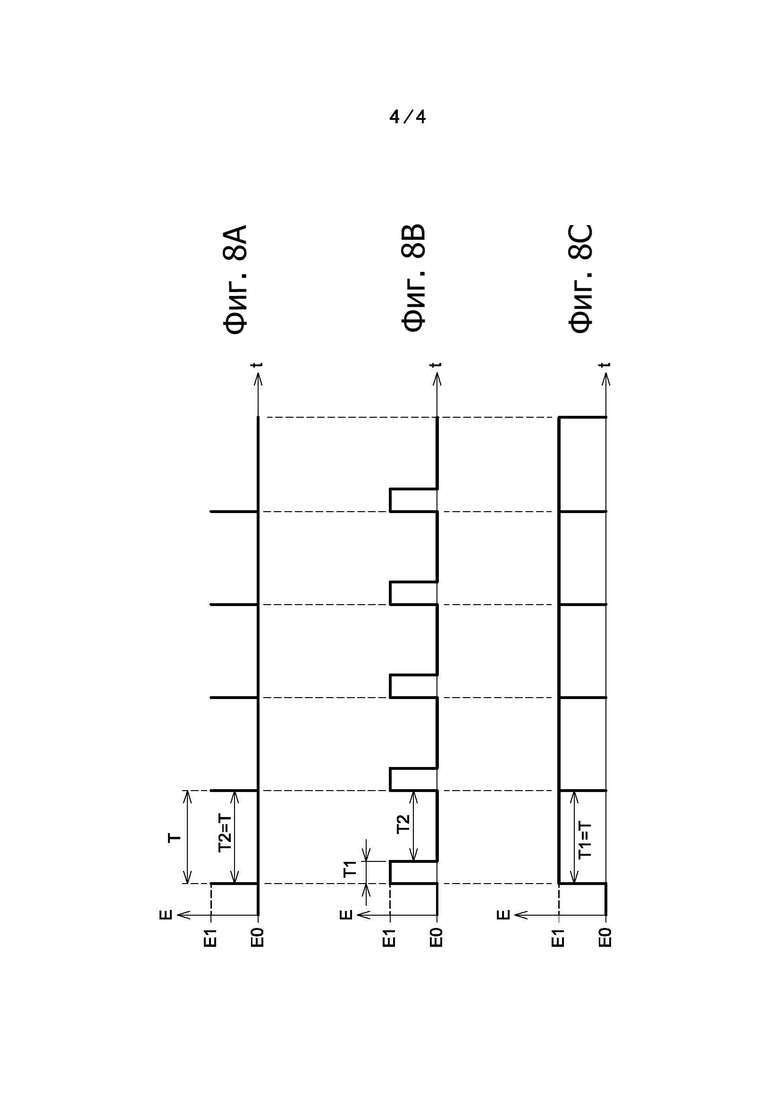
на фиг. 8А, 8В и 8С представлены графики, показывающие различные конфигурации циклического электрического сигнала для управления электрическим насосом посредством широтно-импульсной модуляции, при этом на каждом графике показано значение электрической мощности, подаваемой на электрический насос, в зависимости от времени.
Осуществление изобретения
В дальнейшем тексте описания элементы, имеющие идентичную конструкцию или выполняющие аналогичные функции, будут иметь одинаковые обозначения.
В дальнейшем тексте описания в качестве не ограничительного примера будут использованы следующие ориентации: продольная, направленная от задней стороны к передней в направлении перемещения транспортного средства, вертикальная, направленная снизу вверх перпендикулярно к поверхности, по которой движется транспортное средство, и поперечная, направленная слева направо. Эти ориентации соответственно показаны на фигурах в виде прямоугольной системы координат «L, V, T».
На фиг. 1 схематично показано автотранспортное средство 10 с четырьмя ведущими колесами.
В частности, транспортное средство 10 содержит два передних колеса 12 и два задних колеса 14. Передние колеса 12 постоянно соединены с поперечным передним колесным валом 16. Точно так же, два задних колеса 14 постоянно соединены с поперечным задним колесным валом 18.
Автотранспортное средство 10 может работать в режиме «два ведущих колеса» или в режиме «четыре ведущих колеса».
В режиме «два ведущих колеса» тепловой двигатель 19 транспортного средства вращает только один из двух колесных валов 16, 18. В примере, представленном на фиг. 1, тепловой двигатель 19 вращает только передний вал 16. Таким образом, в режиме «два ведущих колеса» ведущими являются только передние колеса 12. В дальнейшем передние колеса 12 будут называться «первыми колесами 12».
В варианте тепловой двигатель приводит во вращение только задний вал.
В режиме «четыре ведущих колеса» передний колесный вал 16 может передавать крутящий момент на задний колесный вал 18 через гидростатическую трансмиссию 20.
Гидростатическая трансмиссия 20 содержит гидравлический насос 22 и гидравлический двигатель 24. Гидравлический двигатель 24 соединен с гидравлическим насосом 22 через гидравлический контур 26, в котором циркулирует гидравлическая жидкость.
Как правило, гидравлическая жидкость является по существу несжимаемой жидкостью, такой как масло.
Гидравлический насос 22 выполнен с возможностью управляемого соединения с передним колесным валом 16 при помощи первого фрикционного сцепления 28. Таким образом, первое сцепление 28 предназначено для соединения гидравлического насоса 22 с первыми колесами 12 транспортного средства 10. Гидравлический насос 22 выполнен, таким образом, с возможностью своего приведения во вращение двигателем 19 внутреннего сгорания транспортного средства.
Гидравлический двигатель 24 выполнен с возможностью управляемого соединения с задним колесным валом 18 при помощи второго фрикционного сцепления 30. Таким образом, второе сцепление 30 предназначено для соединения гидравлического двигателя 24 с задними колесами 14 транспортного средства, которые могут приводиться во вращение через гидростатическую трансмиссию 20.
Как показано на фиг. 2 и 3, каждое фрикционное сцепление 28, 30 содержит по меньшей мере один фрикционный диск 32, который связан во вращении с соответствующим колесным валом 16, 18, и нажимные диски 34, которые связаны во вращении с валом 36, 38 соответствующего элемента 36, 38 гидростатической трансмиссии 20, а именно с приводным валом 36 гидравлического насоса 22 или с ведущим валом 38 гидравлического двигателя 24.
В данном случае речь идет о многодисковых сцеплениях, которые содержат несколько параллельных фрикционных дисков, каждый из которых расположен между двумя нажимными дисками 34. Кроме того, нажимные диски 34 установлены с возможностью перемещения скольжением в осевом направлении для обеспечения сжатия расположенных между ними фрикционных дисков 32.
Каждое фрикционное сцепление 28, 30 выполнено с возможностью своего управления между:
- полностью разомкнутым состоянием, в котором нажимные диски 34 отведены в осевом направлении от фрикционных дисков 32, полностью прерывая соединение между колесным валом 16, 18 и гидростатической трансмиссией 20, как показано на фиг. 2; и
- полностью сомкнутым состоянием, в котором нажимные диски прижаты в осевом направлении к фрикционным дискам 32, соединяя без проскальзывания колесный вал 16, 18 с гидростатической трансмиссией 20, как показано на фиг. 3.
Кроме того, каждое сцепление 28, 30 выполнено с возможностью занимать промежуточное состояние между полностью разомкнутым состоянием и полностью сомкнутым состоянием, в котором соответствующий колесный вал 16, 18 частично соединяется с проскальзыванием с соответствующим элементом гидростатической трансмиссии 20.
Каждым сцеплением 28, 30 управляют при помощи гидравлического привода 40, который на фигурах показан схематично. Разумеется, гидравлический привод 40 может воздействовать на сцепление через элементы угловой передачи усилий, такие как приводная вилка (не показана). Чтобы перевести каждое сцепление 28, 30 в его полностью сомкнутое состояние, давление «Р» гидравлической жидкости в соответствующем гидравлическом приводе должно превышать или быть равным определенному давлению «Pf» смыкания, например, давление «Pf» смыкания по существу равно 10 бар. Чтобы перевести каждое сцепление 28, 30 в его полностью разомкнутое состояние, давление «Р» гидравлической жидкости в соответствующем гидравлическом приводе должно быть меньше или равно определенному давлению «Po» размыкания, например, давление «Po» размыкания по существу равно 1 бар.
Когда давление «Р» гидравлической жидкости, питающей гидравлические приводы 40, находится в интервале между давлением «Ро» размыкания и давлением «Pf» смыкания, сцепления 28, 30 могут неконтролируемо занимать любое из своих трех состояний.
Например, гидравлический привод 40 является гидравлическим цилиндром, получающим питание гидравлической жидкостью при помощи электрического насоса 42, который соединен одновременно с обоими приводами 40 через систему 44 трубопроводов. Электрический насос 42 управляет одновременно первым сцеплением 28 и вторым сцеплением 30, действуя на давление «Р» гидравлической жидкости.
Электрический насос 42 позволяет изменять давление «Р» гидравлической жидкости, питающей гидравлические приводы 40, между давлением «Р», превышающим или равным давлению «Pf» смыкания сцеплений 28, 30, и давлением «Ро» размыкания сцеплений 28, 30.
Электрический насос 42 содержит роторный электрический двигатель (не показан), который позволяет приводить в движение элементы (не показаны), создающие давление гидравлической жидкости. Давление гидравлической жидкости зависит от скорости вращения двигателя электрического насоса 42.
Электрическим питанием электрического насоса 42 управляет электронный блок 46 управления, установленный на борту транспортного средства 10. Электрическую мощность «Е», необходимую для питания электрического насоса 42, обеспечивает источник электрической мощности, такой как электрическая аккумуляторная батарея 48. В дальнейшем электрическая мощность, необходимая для придания гидравлической жидкости давления «Pf» смыкания, будет называться электрической мощностью «Е1» смыкания.
Батарею 48 используют также для питания различных агрегатов 50 транспортного средства 10, среди которых можно указать устройства электрического обогрева, такие как воздухонагреватели.
Батарея 48 может выдавать определенную максимальную электрическую мощность «Emax» для питания агрегатов 50 и электрического насоса 42. Таким образом, в любой момент сумма электрических мощностей «Е», потребляемых каждым агрегатом 50 и электрическим насосом 42, не может превышать максимальную электрическую мощность «Emax». Максимальная электрическая мощность «Emax» может соответствовать максимальной мощности, которую по своим характеристикам может выдавать батарея 48, или ее можно зафиксировать в значении, меньшей указанной максимальной мощности.
В представленном на фигурах не ограничительном варианте осуществления трубопроводы 44 сообщаются с гидравлическим контуром 26 гидростатической трансмиссии 20. Таким образом, электрический насос 42 управляет также давлением «Р» гидравлической жидкости гидравлического контура гидростатической трансмиссии 20. Следовательно, гидравлические приводы 40 сцеплений 28, 30 и гидростатическая трансмиссия 20 получают питание одной и той же гидравлической жидкостью, и давление «Р» является по существу одинаковым в гидравлических приводах 40 и в гидростатической трансмиссии 20.
Гидростатическая трансмиссия 20 может быть переведена в первый нерабочий режим «Moff», в котором электронный блок 46 управления питает электрический насос 42 электрической мощностью «Е», меньшей или равной определенной электрической мощности «Е0» размыкания, чтобы перевести сцепления 28, 30 в их полностью разомкнутое состояние, соответствующее давлению «Р» гидравлической жидкости, меньшему или равному давлению «Ро» размыкания. Электрическая мощность «Е0» размыкания имеет, например, нулевое значение, поэтому электрический насос 42 не получает питания электрической мощностью «Е».
Гидростатическая трансмиссия 20 может быть переведена во второй рабочий режим «Mon», в котором электронный блок 46 управления питает электрически насос 42 электрической мощностью «Е», превышающей или равной определенной электрической мощности «Е1» смыкания, чтобы перевести сцепления 28, 30 в их полностью сомкнутое состояние, соответствующее давлению «Р» гидравлической жидкости, превышающему или равному давлению «Pf» смыкания.
В этом рабочем режиме «Mon» передний колесный вал 16 приводит во вращение гидравлический насос 22 через первое сцепление 28. Приведенный во вращение гидравлический насос 22 создает циркуляцию под давлением гидравлической жидкости в гидравлическом двигателе 24 через гидравлический контур 26. Гидравлический двигатель 24 приводится во вращение циркулирующей гидравлической жидкостью, и это движение вращения передается на задний колесный вал 18 через второе сцепление 30.
Предпочтительно создание давления гидравлической жидкости гидростатической трансмиссии 20 электрическим насосом 42 в рабочем режиме «Mon» позволяет повысить КПД гидростатической трансмиссии 20. Кроме того, электрический насос 42 регулирует давление «Р» таким образом, чтобы компенсировать возможные утечки гидравлической жидкости в гидравлическом контуре. Для этого электрический насос 42 использует резерв гидравлической жидкости (не показан).
Как показано на фиг. 4, было установлено, что повышение давления гидравлической жидкости в зависимости от электрической мощности «Е» питания происходит быстрее, когда температура гидравлической жидкости является более высокой. Таким образом, если гидравлическую жидкость нагреть до температуры «θ1», создание давления, превышающего или равного давлению «Pf» смыкания, требует электрической мощности «Е1а» смыкания, меньшей, чем электрическая мощность «E1b» смыкания, необходимая, когда гидравлическая жидкость имеет температуру «θ2» ниже температуры «θ1».
Следовательно, предпочтительно гидравлическую жидкость нагревают и поддерживают ее температуру как можно ближе к температуре «θ1» оптимальной работы, которая позволяет снизить электрическое потребление электрического насоса 42 во время использования гидростатической трансмиссии 20.
Кроме того, если электрическая мощность, потребляемая агрегатами 50 транспортного средства и электрическим насосом 42, превышает максимальную электрическую мощность «Emax», необходимо отключить или снизить потребление некоторыми агрегатами 50, которые не являются приоритетными по сравнению с электрическим насосом 42. Снижение электрического потребления электрическим насосом 42 позволяет, таким образом, сократить риск наступления ситуаций этого типа.
Изобретением предложено питать электрический насос 42 промежуточной электрической мощностью «Е2», находящейся в интервале между электрической мощностью «Е1» смыкания и электрической мощностью «Е0» размыкания, когда отпадает необходимость в работе гидростатической трансмиссии 20 в рабочем режиме «Mon». Таким образом, электрический насос 42 вращается в достаточной степени, чтобы перемешивать гидравлическую жидкость и обеспечивать, таким образом, ее нагрев. Промежуточную электрическую мощность «Е2» выбирают таким образом, чтобы обеспечивать нормальную работу активных агрегатов 50 без превышения максимальной электрической мощности «Emax», выдаваемой батареей 48.
В частности, гидростатическую трансмиссию 20 можно перевести в дежурный режим «Mv», в котором электрический насос 42 получает питание промежуточной электрической мощностью «Е2» между электрической мощностью «Е0» размыкания и электрической мощностью «Е1» смыкания.
Промежуточную электрическую мощность «Е2» определяют таким образом, чтобы общая электрическая мощность, потребляемая агрегатами 50 транспортного средства и электрическим насосом 42, была меньше или равна максимальной электрической мощности «Emax».
В варианте промежуточную электрическую мощность «Е2» определяют таким образом, чтобы общая электрическая мощность, потребляемая агрегатами 50 транспортного средства и электрическим насосом 42, была по существу равна максимальной электрической мощности «Emax».
В этом дежурном режиме «Mv» значение электрической мощности определяют в зависимости от активированных агрегатов 50. Например, электронный блок 46 управления содержит в своей памяти таблицу соответствия, которая позволяет установить значение определенной промежуточной электрической мощности «Е2» в зависимости от комбинации активированных агрегатов 50.
В варианте значение промежуточной электрической мощности «Е2» является постоянным и не зависит от активированных агрегатов.
Перевод в дежурный режим «Mv» осуществляет автоматически электронный блок 46 управления в зависимости от определенных рабочих параметров транспортного средства. Дежурный режим «Mv» запускают, когда реализована комбинация условий, применяемых к выбранным рабочим параметрам. Эти условия выбирают, например, из нижеследующего неограничивающего списка:
- водитель затребовал применение рабочего режима «Mon»;
- скорость перемещения транспортного средства находится в заранее определенном интервале;
- режим двигателя 19 внутреннего сгорания ниже определенного порога;
- крутящий момент, затребованный от двигателя 19 внутреннего сгорания, превышает определенный порог;
- педаль акселератора транспортного средства нажата сверх определенного порога;
- температура гидравлической жидкости ниже определенной температуры.
Согласно первому примеру, переход в дежурный режим «Mv» происходит, если реализованы все условия, приведенные в вышеупомянутом списке.
В варианте, переход в дежурный режим «Mv» происходит, когда удовлетворено первое условие, то есть, например, активация водителем рабочего режима «Mon», и одновременно удовлетворено по меньшей мере одно из других условий из списка.
На фиг. 4-6 представлен неограничивающий пример управления электрическим насосом 42 в зависимости от комбинации двух рабочих параметров транспортного средства. В данном случае электрический насос 42 получает питание электрической мощностью «Е1» смыкания, если одновременно удовлетворены два следующих условия:
- водитель затребовал применение рабочего режима «Mon», что показано на фиг. 6 между моментами «t1» и «t4»; и
- скорость «V» перемещения транспортного средства превышает верхний предел «V2», что показано на фиг. 5 между моментами «t1» и «t2» и между моментами «t3» и «t4».
Таким образом, как показано на фиг. 7, электрический насос 42 получает питание электрической мощностью смыкания «Е1» между моментами «t1» и «t2» и между моментами «t3» и «t4».
Электрический насос 42 получает питание промежуточной электрической мощностью «Е2», если одновременно удовлетворены два следующих условия:
- водитель затребовал применение рабочего режима «Mon», что показано на фиг. 6 между моментами «t1» и «t4»; и
- скорость «V» перемещения транспортного средства находится в интервале между нижним пределом «V1» и верхним пределом «V2», что показано на фиг. 5 между моментами «t2» и «t3».
Таким образом, как показано на фиг. 7, электрический насос 42 получает питание промежуточной электрической мощностью «Е2» между моментами «t2» и «t3».
Это позволяет перевести трансмиссию в дежурный режим «Mv», когда отпадает необходимость в условиях активации рабочего режима «Mon». Учитывая, что водитель продолжает запрашивать применение рабочего режима «Mon», этот переход в дежурный режим «Mv» позволяет поддерживать температуру гидравлической жидкости в предвидении следующей повторной активации рабочего режима «Mon», если опять будут реализованы условия.
В данном случае электронный блок 46 управления задает значение электрической мощности «Е» питания электрического насоса 42 посредством широтно-импульсной модуляции циклического электрического сигнала. Такой способ управления известен под названием «Широтно-импульсная модуляция» (ШИМ) или под английским названием “Pulse Width Modulation” (PWM).
Как показано на фиг. 8А, 8В, 8С, каждый цикл циклического электрического сигнала имеет период «Т». Каждый цикл содержит последовательность импульса, имеющего плоский участок электрической мощности определенного не равного нулю значения, за которым следует плоский участок электрической мощности нулевого значения.
Период «Т» является исключительно коротким, поскольку сигнал имеет частоту «f» порядка десятка кГц, например, частота «f» составляет от 10 до 20 кГц.
Передача указанного плоского участка импульса происходит в течение первой продолжительности «Т1», тогда как передачи плоского участка нулевого значения происходит в течение второй продолжительности «Т2». Сумма этих двух продолжительностей «Т1+Т2» равна периоду «Т» электрического сигнала. Определяют циклическое соотношение «R», которое равно соотношению между первой продолжительностью «Т1» импульса и периодом «Т» электрического сигнала. Значение электрической мощности, поступающей в электрический насос 42 в течение одного цикла, равно, таким образом, произведению циклического соотношения «R» на значение электрической мощности импульса. Следовательно, для продолжительности в одну секунду электрическая мощность, получаемая электрическим насосом 42, равна произведению циклического соотношения «R» на значение электрической мощности импульса.
Управление посредством широтно-импульсной модуляции состоит в изменении значения электрической мощности, получаемой электрическим насосом 42, путем изменения циклического соотношения «R», то есть путем изменения первой продолжительности «Т1» импульса. Таким образом, электронный блок 46 управления изменяет электрическую мощность «Е», питающую электрический насос 42, воздействуя на циклическое соотношение «R».
В примере, представленном на фигурах, электрическую мощность «Е», питающую электрический насос 42, регулируют, изменяя электрическое напряжение электрического сигнала.
Обычно, когда гидростатическая трансмиссия 20 работает в рабочем режиме «Mon», электронный блок 46 управления выдает электрический сигнал с циклическим соотношением «R», превышающим или равным определенному верхнему порогу «R1», чтобы питать электрический насос 42 электрической мощностью, превышающей или равной электрической мощности «Е1» смыкания за один цикл.
Когда гидростатическая трансмиссия 20 находится в нерабочем режиме «Moff», электронный блок 46 управления выдает электрический сигнал с циклическим соотношением «R», меньшим или равным определенному нижнему порогу «R0», например, 0.
Когда гидростатическая трансмиссия 20 находится в дежурном режиме «Mv», циклическое соотношение «R» принимает промежуточное значение «R2» между нижним порогом и верхним порогом.
В примерах, представленных на фиг. 8А, 8В и 8С, электрическая мощность импульса равна электрической мощности «Е1» смыкания.
Так, в примере, показанном на фиг. 8А, продолжительность импульса «Т1» равна нулю. Следовательно, циклическое соотношение тоже равно нулю, и электрический насос 42 не получает питания. Речь идет о сигнале, выдаваемом во время работы в нерабочем режиме «Moff» гидростатической трансмиссии 20.
В примере, представленном на фиг. 8В, продолжительность «Т1» импульса равна доле периода «Т», в данном случае четверти периода «Т». Следовательно, циклическое соотношение равно указанной доле, в данном случае 25%. Электрический насос 42 получает питание промежуточной электрической мощностью «Е2», которая равна примерно 25% электрической мощности «Е1» смыкания. Речь идет о сигнале, выдаваемом во время работы в дежурном режиме «Mv» гидростатической трансмиссии 20.
В примере, представленном на фиг. 8С, продолжительность «Т1» импульса равна продолжительности периода «Т». Следовательно, циклическое соотношение равно 100%. Электрический насос 42 получает питание электрической мощностью «Е1» смыкания. Речь идет о сигнале, выдаваемом во время работы в рабочем режиме «Mon» гидростатической трансмиссии 20.
Предпочтительно, изобретение позволяет уменьшить электрическое потребление транспортного средства за счет повышения температуры гидравлической жидкости, поддерживая ее горячей между периодами работы в рабочем режиме «Mon» гидростатической трансмиссии 20, в частности, когда водитель затребовал применение рабочего режима «Mon», но при этом не все условия удовлетворены.
Кроме того, это позволяет сократить наступление ситуаций, в которых общее потребление агрегатов 50 и электрического насоса 42 превышает максимальную электрическую мощность «Emax» батареи 48.
Кроме того, переход гидростатической трансмиссии 20 в дежурный режим «Mv» вместо ее перехода в нерабочий режим «Moff» позволяет быстрее вернуться в рабочий режим «Mon», когда условия опять реализованы. Действительно, поскольку насос 42 уже был активирован в дежурный режим «Mv», то нет необходимости в преодолении его инерции, чтобы опять перейти в рабочий режим «Mon». Следовательно, время реакции между передачей команды на смыкание сцеплений 28, 30 и реальным смыканием сцеплений 28, 30 значительно сокращается по сравнению с известными техническими решениями.
Изобретение относится к способу управления гидростатической трансмиссией автотранспортного средства. Автотранспортное средство содержит гидравлический насос, гидравлический двигатель, первое фрикционное сцепление с гидравлическим приводом, второе фрикционное сцепление с гидравлическим приводом и электрический насос. Первое фрикционное сцепление предназначено для соединения гидравлического насоса с колесами. Второе фрикционное сцепление предназначено для соединения гидравлического двигателя с колесами. Электрический насос управляет одновременно обоими сцеплениями. Гидростатическая трансмиссия выполнена с возможностью перехода в дежурный режим, в котором электронный блок управления питает электрический насос промежуточной электрической мощностью в значении между электрической мощностью размыкания сцеплений и электрической мощностью смыкания сцеплений. Достигается повышение надежности устройства и экономичности. 14 з.п. ф-лы, 8 ил.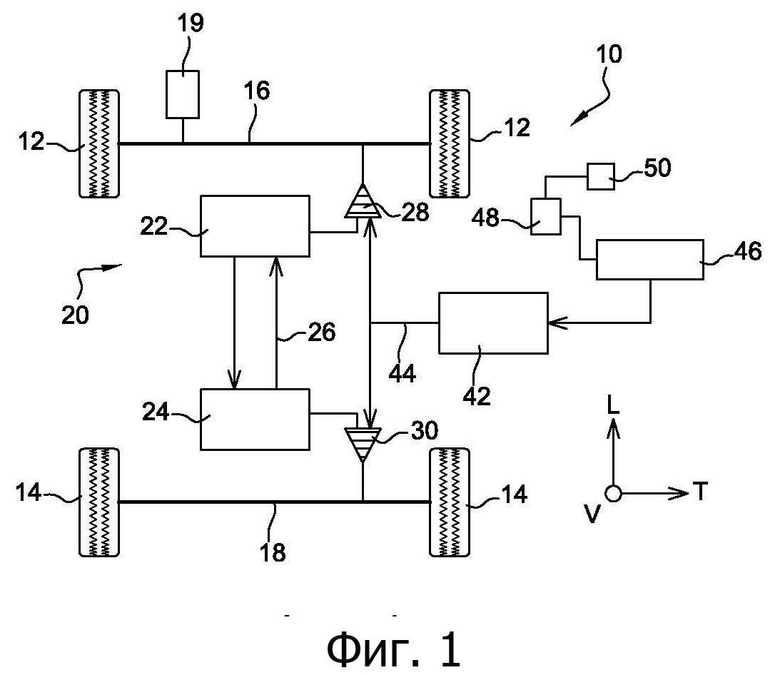
1. Способ управления гидростатической трансмиссией (20) автотранспортного средства (10), при этом автотранспортное средство (10) содержит:
- гидростатическую трансмиссию (20), содержащую гидравлический насос (22) для создания давления гидравлической жидкости и гидравлический двигатель (24), соединенный с гидравлическим насосом (22) через гидравлический контур (26);
- первое фрикционное сцепление (28) с гидравлическим приводом, предназначенное для соединения гидравлического насоса (22) с первыми колесами (12) транспортного средства (10);
- второе фрикционное сцепление (30) с гидравлическим приводом, предназначенное для соединения гидравлического двигателя (24) со вторыми колесами (14) транспортного средства (10);
- электрический насос (42), который управляет одновременно первым сцеплением (28) и вторым сцеплением (30) между полностью сомкнутым состоянием и полностью разомкнутым состоянием посредством управления давлением (Р) гидравлической жидкости;
- электронный блок (46) управления, который управляет электрическим питанием электрического насоса (42);
- источник электрической мощности, выполненный с возможностью выдавать максимальную электрическую мощность (Emax) в электрический насос (42);
при этом гидростатическая трансмиссия (20) выполнена с возможностью работать:
- в рабочем режиме (Mon), в котором электронный блок (46) управления питает электрический насос (42) электрической мощностью, превышающей или равной определенной электрической мощности (Е1) смыкания, для перевода сцеплений (28, 30) в их полностью сомкнутое состояние;
- в нерабочем режиме (Moff), в котором электронный блок (46) управления питает электрический насос (42) электрической мощностью, меньшей или равной определенной электрической мощности (Е0) размыкания, для перевода (28, 30) сцеплений в их разъединенное состояние;
отличающийся тем, что гидростатическая трансмиссия (20) выполнена с возможностью перехода в дежурный режим (Mv), в котором электронный блок (46) управления питает электрический насос (42) промежуточной электрической мощностью (Е2) в значении между электрической мощностью (Е0) размыкания и электрической мощностью (Е1) смыкания.
2. Способ по п. 1, отличающийся тем, что источник электрической мощности питает также различные агрегаты (50) транспортного средства (10), при этом промежуточную электрическую мощность (Е2) определяют таким образом, чтобы общая электрическая мощность, потребляемая агрегатами (50) и электрическим насосом (42), была меньше или равна максимальной электрической мощности (Emax).
3. Способ по п. 2, отличающийся тем, что промежуточную электрическую мощность (Е2) определяют таким образом, чтобы общая электрическая мощность, потребляемая агрегатами (50) транспортного средства, была по существу равна максимальной электрической мощности (Emax).
4. Способ по любому из пп. 1-3, отличающийся тем, что электрический насос (42) создает также давление гидравлической жидкости гидравлического контура (26) гидростатической трансмиссии (20).
5. Способ по любому из пп. 1-4, отличающийся тем, что переход в дежурный режим (Mv) осуществляют в зависимости от определенных рабочих параметров транспортного средства.
6. Способ по любому из пп. 1-5, отличающийся тем, что транспортное средство (10) оснащено тяговым двигателем (19), который приводит во вращение первые колеса (12) транспортного средства.
7. Способ по п. 5, отличающийся тем, что транспортное средство (10) оснащено тяговым двигателем (19), который приводит во вращение первые колеса (12) транспортного средства, при этом дежурный режим (Mv) запускают, когда удовлетворено по меньшей мере одно из условий из нижеследующего неограничивающего списка:
- водитель затребовал применение рабочего режима (Mon);
- скорость (V) перемещения транспортного средства находится в заранее определенном интервале;
- режим тягового двигателя (19) ниже определенного порога;
- крутящий момент, затребованный от тягового двигателя (19), превышает определенный порог;
- педаль акселератора транспортного средства нажата сверх определенного порога;
- температура гидравлической жидкости ниже определенной температуры.
8. Способ по любому из пп. 1-7, отличающийся тем, что значение электрической мощности, питающей электрический насос (42), задает электронный блок (46) управления посредством широтно-импульсной модуляции циклического электрического сигнала, который питает электрический насос (42) и каждый цикл которого содержит импульс, имеющий определенную интенсивность и/или плоский участок нулевой интенсивности.
9. Способ по п. 8, отличающийся тем, что импульсы передаются циклами определенного периода (Т), например, составляющего от 10 до 20 кГц.
10. Способ по любому из пп. 8 или 9, отличающийся тем, что электронный блок (46) управления изменяет определенную электрическую мощность, действуя на циклическое соотношение (R) между продолжительностью (Т1) импульса и периодом (Т) циклического электрического сигнала.
11. Способ по п. 10, отличающийся тем, что, когда гидростатическая трансмиссия (20) работает в рабочем режиме (Mon), электронный блок (46) управления выдает электрический сигнал с циклическим соотношением (R), превышающим или равным определенному верхнему порогу (R1), например, 1.
12. Способ по любому из пп. 10 или 11, отличающийся тем, что, когда гидростатическая трансмиссия (20) находится в нерабочем режиме (Moff), электронный блок (46) управления выдает электрический сигнал с циклическим соотношением (R), меньшим или равным определенному нижнему порогу (R0), например, 0.
13. Способ по любому из пп. 10 или 11, отличающийся тем, что, когда гидростатическая трансмиссия (20) работает в дежурном режиме (Mv), циклическое соотношение (R) задают по промежуточному значению (R2), находящемуся между нижним порогом (R0) и верхним порогом (R1).
14. Способ по п. 13, отличающийся тем, что промежуточное значение (R2) циклического соотношения зависит от комбинации активированных электрических агрегатов (50).
15. Способ по любому из пп. 2-14, отличающийся тем, что различные задаваемые значения промежуточной электрической мощности (Е2) записаны в памяти электронного блока (46) управления в таблице соответствия, в которой каждой комбинации активированных агрегатов (50) соответствует определенное значение промежуточной мощности (Е2).
| US 20100186408 A1, 29.07.2010 | |||
| US 20160238093 A1, 18.08.2016 | |||
| FR 3037630 A1, 23.12.2016 | |||
| Привод дополнительного ведущего моста транспортного средства | 1989 |
|
SU1636263A1 |
| СИЛОВАЯ ПЕРЕДАЧА ТРАНСПОРТНОГО СРЕДСТВА С ГИДРООБЪЕМНЫМ РЕГУЛИРОВАНИЕМ МОЩНОСТИ НА ВСПОМОГАТЕЛЬНЫЙ ГУСЕНИЧНЫЙ ДВИЖИТЕЛЬ | 2003 |
|
RU2293030C2 |

