ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области автоматизированных систем управления и контроля и может найти применение в системах управления и контроля беспилотными воздушными суднами (БВС), обеспечивая безопасность их полета в общем воздушном пространстве, но может быть применено и на других транспортных средствах. Технический результат - повышение эффективности управления БВС и уровня безопасности. Для достижения данного результата необходимо разделить функцию оповещения летательных аппаратов, находящихся на расстоянии нескольких километров друг от друга, о трафике своего полета и функцию передачи данных и ретрансляции сигналов с других летательных аппаратов, причем функцией оповещения должны обладать все летательные аппараты, а функцией передачи данных и ретрансляции сигналов только тяжелые летательные аппараты весом десятки килограмм. Это позволит построить логическую архитектуру системы управления и прямого контроля за полетом всех летательных аппаратов, обеспечивая требования безопасности.
УРОВЕНЬ ТЕХНИКИ
Из предшествующего уровня техники известен способ управления беспилотным летательным аппаратом. (см. патент RU №2390815, опубл. 27.05.2010 г.), характеризующий управление одним или несколькими беспилотными летательными аппаратами, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовыми радиостанциями, со стационарным или подвижным пунктом управления, который оборудован автоматизированным рабочим местом оператора, при этом передача команд управления движением беспилотного летательного аппарата, передача данных о координатах и параметрах его движения, а также передача идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости, производится в один или несколько общих радиоканалов, причем трансляция сообщений каждой передающей радиостанцией производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд.
Типовая структура системы управления для БВС состоит из различных источников данных. Полученные данные попадают в блок бортовой системы управления (БАСУ), где производится оценка параметров движения объекта и выработка управляющих воздействий на исполнительные механизмы объекта. В качестве входных данных блок системы управления также может принимать внешние управляющие воздействия. Выработанные значения сигналов управления подаются на органы управления полетом БВС. В памяти БАСУ хранятся программы выполнения полета и конфигурации блока управления, изменяющиеся под воздействием определенных событий, происходящих на БВС в полете.
Разные производители пытаются сделать полеты беспилотников безопасными с помощью разных методов. Одни предусматривают указание запретных для полетов мест в программном обеспечении дронов, другие - создание систем уклонения от столкновения в воздухе, третьи - использование системы автоматического зависимого наблюдения-вещания (ADS-B), передающей данные о местоположении аппарата. Новая диспетчерская система NASA, получившая название UTM (UAS Traffic Management, управление движением беспилотных воздушных систем), позволяет организовывать полеты дронов в сегрегированном едином воздушном пространстве.
Недостатком известных способов управления беспилотным летательным аппаратом является то, что управление и контроль БВС осуществляется с наземного пункта управления в пределах радиовидимости, что затрудняет поддержание безотказного состояния оборудования БВС при эксплуатации, а также осуществление контроля за выполнением санкционированного трафика полета БВС, а это снижает уровень безопасности полетов, а по существу делает невозможным обеспечение интеграции беспилотных авиационных систем (БАС) в общее воздушное пространство.
Существующие правила управления воздушным движением (УВД) сформировались, когда масштабы БАС по существу ограничивались авиамодельным спортом.
Воздушное пространство пронизано специальными путями, которые переходят из одной контролируемой зоны в другую. Точное число летательных аппаратов сказать довольно сложно, поскольку оно измеряется уже тысячами самолетов, число которых из года в год только растет.
Можно представить, что будет в воздушном пространстве, когда число увеличится на порядки. И здесь без автоматизированного управления эксплуатацией беспилотного воздушного судна при полетах в общем воздушном пространстве не обойтись, причем автоматически должен формироваться и контролироваться не только трафик полета, но также остаточный ресурс и предотказное состояние на всех этапах жизненного цикла, а также выявление случаев несанкционированного изменения трафика полета БВС.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Предлагаемый способ автоматизированного управления эксплуатацией беспилотного воздушного судна при полетах в общем воздушном пространстве относится к системам управления и контроля беспилотными воздушными суднами (БВС), обеспечивая безопасность их полета в общем воздушном пространстве, с выявлением случаев изменения санкционированного трафика полета, что необходимо в первую очередь для обеспечения безопасности наземных объектов особой важности при несанкционированном использовании БВС, но может быть применен и на других транспортных средствах. Технический результат - повышение эффективности управления БВС и уровня безопасности. Для достижения данного результата необходимо разделить функцию оповещения летательных аппаратов, находящихся на расстоянии нескольких километров друг от друга, о трафике своего полета и функцию передачи данных и ретрансляции сигналов с других летательных аппаратов, причем функцией оповещения должны обладать все летательные аппараты, а функцией передачи данных и ретрансляции сигналов только тяжелые летательные аппараты весом десятки килограмм. Это позволит построить логистическую архитектуру системы управления и прямого контроля за полетом всех летательных аппаратов, обеспечивая требования безопасности.
Достигаемым техническим результатом является обеспечение контроля и управления всеми БВС при их полетах в общем воздушном пространстве за счет разделения функций оповещения летательных аппаратов, находящихся на расстоянии нескольких километров друг от друга, о трафике своего полета и функций передачи данных и ретрансляции сигналов с других летательных аппаратов.
В качестве единственного одобренного на международном уровне решения рассматривается использование для ОрВД на высотах ниже нижнего безопасного эшелона системы автоматического зависимого наблюдения АЗН-В (анг. ADS-B). Принцип действия заключается в автоматическом определении аппаратом с помощью бортового ГЛОНАСС/GPS-модуля собственных координат и их передачи через бортовой приемопередатчик (транспондер) в систему ОрВД и другим летящим рядом БВС.
АЗН-В представляет собой безрадарный метод наблюдения БВС, при котором БВС автономно, например, при помощи средств спутниковой навигации ГЛОНАСС/GPS, определяет свое местоположение и в соответствии с протоколом, зависящим от типа выбранной линии передачи данных (ЛПД), сообщает в радиовещательном режиме о своем положении всем заинтересованным участникам воздушного движения и иным пользователям. АЗН-В с высокой точностью обеспечивает наблюдение БВС без использования наземных радаров при существенно меньших затратах. Использование услуг АЗН-В обычно сопровождается предоставлением других аэронавигационных услуг (примыкающих применений), реализуемых с помощью той же ЛПД, с помощью которой осуществляется предоставление услуг АЗН-В. Однако такие ЛПД обладают большим весом и энергопотреблением и не могут быть использованы на малых БВС весом от сотни грамм до нескольких килограмм. Но именно эта категория БВС составляет основу всех БВС.
Задачей, заявляемого способа автоматизированного управления полетом беспилотного воздушного судна (БВС) в общем воздушном пространстве является - повышение эффективности управления БВС и уровня безопасности. Для достижения данного результата разделяют функцию оповещения летательных аппаратов, находящихся на расстоянии нескольких километров друг от друга, о трафике своего полета и функцию передачи данных и ретрансляции сигналов с других летательных аппаратов, причем функцией оповещения должны обладать все летательные аппараты, а функцией передачи данных и ретрансляции сигналов только тяжелые летательные аппараты весом десятки килограмм. Это позволит построить логическую архитектуру системы управления и прямого контроля за полетом всех летательных аппаратов, обеспечивая требования безопасности.
Для этого каждый БВС снабжается уникальным унифицированным информационным блоком, который имеет как минимум две модификации, одна модификация, для легких БВС, включает блок вычисления своих параметров полета, используя спутниковую навигационную систему, блок передачи этих параметров для информирования других летательных аппаратов, находящихся в ближайшем пространстве, о параметрах трафика своего полета и техническом состоянии БВС, а также блок приема информации с других летательных аппаратов, находящихся в ближайшем пространстве, о трафиках их полета, причем, линии связи используются для полученная дополнительной информация о трафиках полета других БВС, например, используя принцип Доплера, для уточнения реальных координат других БВС, а полученная информация о трафиках взаимного полета, а также аэронавигационные данные и пилотажно-навигационные характеристики, которые используются для формирования трафиков полета, обеспечивающих безопасный совместный полет, исключающий столкновение, а объем информации, обрабатываемой информационным блоком, определяется типом БВС, другая модификация информационного блока, для тяжелых БВС и пилотируемых летательных аппаратов, дополнительно снабжается системой ретрансляции о трафиках полета и техническом состоянии, поступающей на борт такого БВС с других летательных аппаратов, включая малые БВС для передачи, используя систему ретрансляции, в службу управления воздушным движением, которая использует эти данные для контроля управления полетом беспилотного авиационного судна и обеспечения возможности безаварийного продолжения полета, а также выявления случаев получения недостоверной информации о трафике полета с БВС, которые отклоняются от санкционированного трафика полета, а в случае невозможности корректировки полета БВС, например, когда недостоверная информация с БВС передается умышленно, то информация о времени потери управления с таким БВС и параметрах его движения, планируемом трафике полета, а также технические данные в режиме онлайн передаются в службу пресечения несанкционированного полета БВС.
Способ автоматизированного управления полетом беспилотного воздушного судна (БВС) в общем воздушном пространстве, для обеспечения контролируемого безопасного трафика полета с использованием бортовой автоматической системы управления, спутниковой навигационной системы, высокоточных синхронизированных часов, а также бортового вычислителя и приемо-передающей радиостанции, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктами управления, которые оборудованы автоматизированным рабочим местом оператора, отличающийся тем, что каждый БВС снабжается уникальным унифицированным информационным блоком, который имеет как минимум две модификации, одна модификация, для легких БВС, включает блок вычисления своих параметров полета, используя спутниковую навигационную систему, блок передачи параметров трафика своего полета и техническое состояние БВС для информирования летательных аппаратов, находящихся в ближайшем пространстве, а также блок приема информации с других летательных аппаратов, находящихся в ближайшем пространстве о трафиках их полета, причем, радиосигнал дополнительно обрабатывается, например, используя принцип Доплера, для уточнения реальных координат других БВС, а в блоке обработки полученная информация о трафиках взаимного полета, а также аэронавигационные данные и пилотажно-навигационные характеристики, включая команды наземной службы контроля и управления за полетом БВС, преобразуются в команды управления трафиком полета, обеспечивая безопасный совместный полет, исключающий столкновение, а объем информации, обрабатываемой информационным блоком, определяется типом БВС, другая модификация информационного блока, для тяжелых БВС и пилотируемых летательных аппаратов, дополнительно снабжается системой ретрансляции о трафиках полета и техническом состоянии, поступающей на борт такого БВС с других летательных аппаратов, включая малые БВС для передачи, используя систему ретрансляции, в службу управления воздушным движением, которая использует эти данные для контроля управления полетом беспилотного авиационного судна и обеспечение возможности безаварийного продолжения полета, а также выявление случаев получения недостоверной информации о трафике полета с БВС, которые отклоняются от санкционированного трафика полета, а при необходимости, для обеспечения безопасности полетов, корректируют трафики полетов таких БВС, передавая через систему ретрансляции сигналы управления, а в случае невозможности корректировки полета БВС, например, когда недостоверная информация с БВС передается умышленно, то информация о времени потери управления с таким БВС и параметрах его движения, планируемом трафике полета, а также технические данные в режиме онлайн передаются в службу пресечения несанкционированного полета БВС.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Это позволит эффективным путем решить проблемы информативности средств наблюдения за воздушной обстановкой, а также применение эффективных способов управления БАС.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
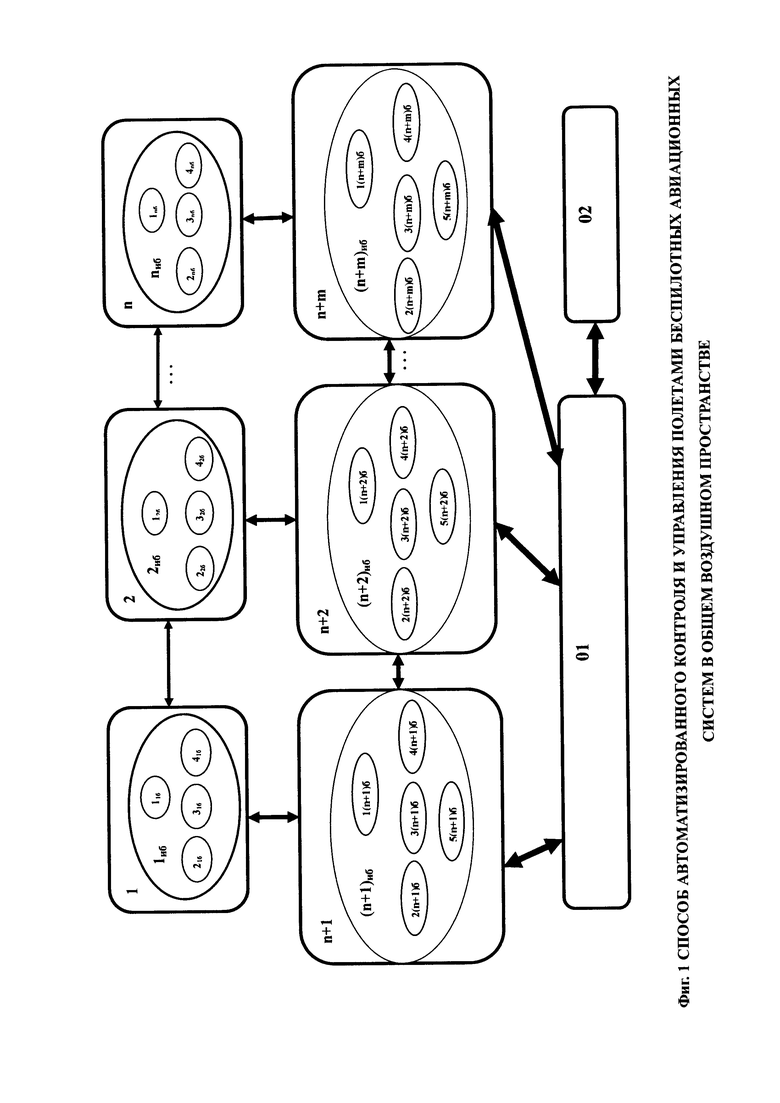
Заявленный способ реализуется по блок-схеме, представленной на Фиг. 1, которая состоит из следующих основных блоков:
01 - служба управления воздушным движением;
02 - служба пресечения несанкционированного полета БВС;
1, 2, …, n - малые БВС не использующие систему ретрансляции;
n+1, n+2, …, n+m - тяжелые БВС использующие систему ретрансляции;
1иб, 2иб, …, nиб - информационные блоки малых БВС;
(n+1)иб, (n+2)иб, (n+m)иб - информационные блоки тяжелых БВС;
11б, 12б, …, 1nб - блоки навигации информационных блоков малых БВС;
21б, 22б, … ,2nб - блоки передачи данных информационных блоков малых БВС;
31б, 32б, … ,3nб - блоки приема данных информационных блоков малых БВС;
41б, 42б, … ,4nб - блоки формирования команд управления информационных блоков малых БВС;
1(n+1)б, 1(n+2)б, …, 1(n+m)б - блоки навигации информационных блоков тяжелых БВС;
2(n+1)б, 2(n+2)б, …, 2(n+m)б - блоки передачи данных информационных блоков тяжелых БВС;
3(n+1)б, 3(n+2)б, …, 3(n+m)б - блоки приема данных информационных блоков тяжелых БВС;
4(n+1)б, 4(n+2)б, …, 4(n+m)б - блоки формирования команд управления информационных блоков тяжелых БВС;
5(n+1)б, 5(n+2)б, …, 5(n+m)б - блоки ретрансляции информационных блоков тяжелых БВС;
ПОДРОБНОЕ ОПИСАНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
В качестве единственного одобренного на международном уровне решения рассматривается использование для ОрВД на высотах ниже нижнего безопасного эшелона системы автоматического зависимого наблюдения АЗН-В (анг. ADS-B). Принцип действия заключается в автоматическом определении аппаратом с помощью бортового ГЛОНАСС/GPS-модуля собственных координат и их передачи через бортовой приемопередатчик (транспондер) в систему ОрВД и другим летящим рядом БВС.
АЗН-В представляет собой безрадарный метод наблюдения БВС, при котором БВС автономно, например, при помощи средств спутниковой навигации ГЛОНАСС/GPS, определяет свое местоположение и в соответствии с протоколом, зависящим от типа выбранной линии передачи данных (ЛПД), сообщает в радиовещательном режиме о своем положении всем заинтересованным участникам воздушного движения и иным пользователям. АЗН-В с высокой точностью обеспечивает наблюдение БВС без использования наземных радаров при существенно меньших затратах. Использование услуг АЗН-В обычно сопровождается предоставлением других аэронавигационных услуг (примыкающих применений), реализуемых с помощью той же ЛПД, с помощью которой осуществляется предоставление услуг АЗН-В. Однако такие ЛПД обладают большим весом и энергопотреблением и не могут быть использованы на малых БВС весом от сотни грамм до нескольких килограмм. Но именно эта категория БВС составляет основу всех БВС.
Задачей, заявляемого способа автоматизированного управления полетом беспилотного воздушного судна (БВС) в общем воздушном пространстве является - повышение эффективности управления БВС и уровня безопасности. Для достижения данного результата разделяют функцию оповещения летательных аппаратов, находящихся на расстоянии нескольких километров друг от друга, о трафике своего полета и функцию передачи данных и ретрансляции сигналов с других летательных аппаратов, причем функцией оповещения должны обладать все летательные аппараты, а функцией передачи данных и ретрансляции сигналов только тяжелые летательные аппараты весом в десятки килограмм. Это позволит построить логическую архитектуру системы управления и прямого контроля за полетом всех летательных аппаратов, обеспечивая требования безопасности.
Для этого каждый БВС снабжается уникальным унифицированным информационным блоком, включающим блок вычисления своих параметров полета, используя спутниковую навигационную систему, блок передачи этих параметров для информирования других летательных аппаратов, находящихся в ближайшем пространстве, о трафике своего полета и техническом состоянии БВС, а также блок приема информации с других летательных аппаратов, находящихся в ближайшем пространстве, о трафиках их полета, причем, а линии радиосвязи дополнительно используются для полученная информация о трафиках полета других БВС, например, используя принцип Доплера, для уточнения реальных координат других БВС, а полученная информация о трафиках взаимного полета, а также аэронавигационные данные и пилотажно-навигационные характеристики, которые используются для формирования трафиков полета, обеспечивающих безопасный совместный полет, исключающий столкновение, кроме того, тяжелые БВС и пилотируемые летательные аппараты дополнительно снабжаются системой ретрансляции о трафиках полета и техническом состоянии, поступающей на борт такого БВС с других летательных аппаратов, включая малые БВС для передачи, используя систему ретрансляции, в службу управления воздушным движением, которая использует эти данные для контроля управления полетом беспилотного авиационного судна и обеспечения возможности безаварийного продолжения полета, а также выявления случаев получения недостоверной информации о трафике полета с БВС, которые отклоняются от санкционированного трафика полета, а в случае невозможности корректировки полета БВС, например, когда недостоверная информация с БВС передается умышленно, то информация о времени потери управления с таким БВС и параметрах его движения, планируемом трафике полета, а также технические данные в режиме онлайн передаются в службу пресечения несанкционированного полета БВС.
Способ осуществляется следующим образом: малые БВС автономно, при помощи средств спутниковой навигации ГЛОНАСС/GPS, определяют свое местоположение и в соответствии с протоколом, зависящим от типа выбранной линии передачи данных (ЛПД), сообщают в радиовещательном режиме о своем положении всем заинтересованным участникам воздушного движения и иным пользователям в зоне прямой видимости текущие параметры трафика полета своего полета, а также осуществляют вычисление по доплеровским измерениям текущие параметры трафика полета других БВС которые находятся в ближайшем пространстве. Такие функции могут быть выполнены микро модемами, которые можно установить на любой маленький БВС.
Тяжелые БВС оснащены модемами ретрансляции больших потоков данных, которые способны передавать текущую информацию с других БВС на большое расстояние, при необходимости могут использоваться и спутниковые линии связи.
В случае отклонения от санкционированного трафика полета служба управления воздушным движением подает команды на возвращение к санкционированному трафику полета и автоматически эта информация поступает в службу пресечения несанкционированного полета беспилотного воздушного судна. В случае возвращения БВС к санкционированному трафику полета продолжается штатный режим работы службы управления воздушным движением, а если принятые меры не дали положительного результата, то служба пресечения несанкционированного полета беспилотного воздушного судна принимает меры по пресечению такого полета, используя информацию о характеристиках БВС, времени и месте начала несанкционированного полета.
Кроме того, корректировка трафика полета, для выполнения программы полета и исключения столкновений с другими летательными аппаратами, осуществляется автоматически, используя информацию, полученную по линии связи о трафиках полета других беспилотных воздушных судов, которые такую информацию регулярно сообщают по линии связи, а службы управления воздушным движением и внешние операторы осуществляют контроль за исполнением трафиков полета и при необходимости, для обеспечения безопасности полетов, корректируют трафики полетов беспилотных авиационных судов.
Используя эти данные можно выявить все отклонения от санкционированного трафика полета и принять соответствующие меры, а также выявлять «фантомы», которые умышленно внедряются в систему контроля воздушным движением для внесения помех в ее нормальную работу.
Достигаемым техническим результатом является за счет разделения функций оповещения летательных аппаратов, находящихся на расстоянии нескольких километров друг от друга, о трафике своего полета и функций передачи данных и ретрансляции сигналов с других летательных аппаратов обеспечить контроль и управление всеми БВС при их полетах в общем воздушном пространстве.
Технический результат заявляемого способа обеспечивается за счет:
- разработки концепции полетов БАС в общем воздушном пространстве, основанной на предлагаемом способе (такая концепция отсутствует и у нас и за рубежом);
- разработки и отработки технических средств (наземных и бортовых), обеспечивающих технологию выполнения полетов беспилотных авиационных систем в общем воздушном пространстве, с выполнением требований по безопасности полетов, основанных на предлагаемом способе;
- разработки законодательных и нормативных документов, а также правил, регламентирующих полеты беспилотных авиационных систем в общем воздушном пространстве, основанных на предлагаемом способе.
Поставленная цель достигается тем, что в известном способе управления беспилотными летательными аппаратами, каждый из которого оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктами управления, которые оборудованы автоматизированным рабочим местом оператора, каждый БВС снабжается уникальным унифицированным информационным блоком, включающим блок вычисления своих параметров полета, используя спутниковую навигационную систему, блок передачи параметров трафика своего полета и техническое состояние БВС для информирования летательных аппаратов, находящихся в ближайшем пространстве, а также блок приема информации с других летательных аппаратов, находящихся в ближайшем пространстве, с параметрами о трафиках их полета, причем, радиосигнал дополнительно обрабатывается, например, используя принцип Доплера, для уточнения реальных координат других БВС, а в блоке обработки полученная информация о трафиках взаимного полета, а также аэронавигационные данные и пилотажно-навигационные характеристики, включая команды наземной службы контроля и управления за полетом БВС, которые преобразуются в команды управления трафиком полета, обеспечивающий безопасный совместный полет, исключающий столкновение, кроме того, тяжелые БВС и пилотируемые летательные аппараты дополнительно снабжаются системой ретрансляции о трафиках полета и техническом состоянии, поступающей на борт такого БВС с других летательных аппаратов, включая малые БВС для передачи, используя систему ретрансляции, в службу управления воздушным движением, которая использует эти данные для контроля управления полетом беспилотного авиационного судна и обеспечения возможности безаварийного продолжения полета, а также выявления случаев получения недостоверной информации о трафике полета с БВС, которые отклоняются от санкционированного трафика полета, а при необходимости, для обеспечения безопасности полетов, корректируют трафики полетов таких БВС, передавая через систему ретрансляции сигналы управления, а в случае невозможности корректировки полета БВС, например, когда недостоверная информация с БВС передается умышленно, то информация о времени потери управления с таким БВС и параметрах его движения, планируемом трафике полета, а также технические данные в режиме онлайн передаются в службу пресечения несанкционированного полета БВС.
Изобретение относится к способу автоматизированного управления полетом беспилотного воздушного судна (БВС) в общем воздушном пространстве. Для автоматизированного управления полетом используют бортовую автоматическую систему управления, спутниковую навигационную систему, высокоточные синхронизированные часы, бортовой вычислитель и приемо-передающую радиостанцию для связи с базовой радиостанцией, со стационарным или подвижным пунктами управления. Каждое БВС снабжается уникальным унифицированным информационным блоком, который имеет две модификации: для легких и тяжелых БВС. Модификация для легких БВС содержит блок вычисления параметров полета, навигационную систему, блок передачи параметров трафика своего полета и технического состояния для информирования летательных аппаратов, находящихся в ближайшем пространстве, блок приема информации с других летательных аппаратов, находящихся в ближайшем пространстве, о трафиках их полета. Модификация для тяжелых БВС и пилотируемых летательных аппаратов дополнительно содержит систему ретрансляции о трафиках полета и техническом состоянии, поступающей на борт такого БВС с других летательных аппаратов. Обеспечивается повышение эффективности управления БВС и уровня безопасности. 1 ил.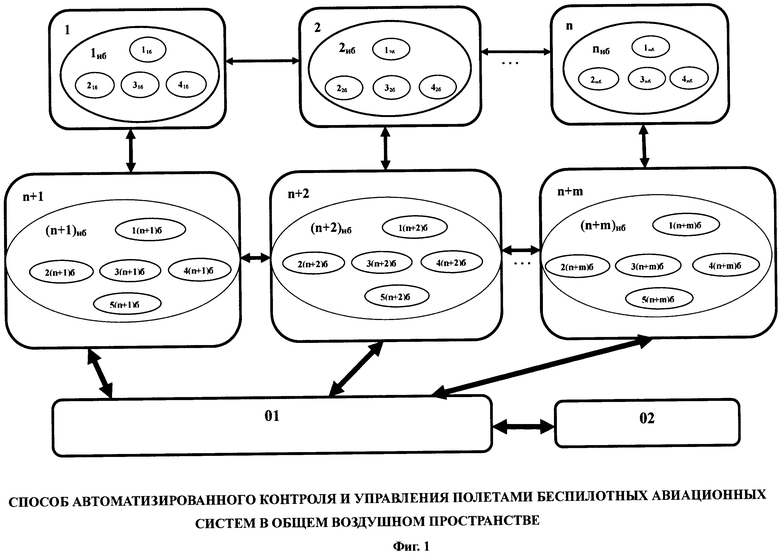
Способ автоматизированного управления полетом беспилотного воздушного судна (БВС) в общем воздушном пространстве для обеспечения контролируемого безопасного трафика полета с использованием бортовой автоматической системы управления, спутниковой навигационной системы, высокоточных синхронизированных часов, а также бортового вычислителя и приемо-передающей радиостанции, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктами управления, которые оборудованы автоматизированным рабочим местом оператора, отличающийся тем, что каждое БВС снабжается уникальным унифицированным информационным блоком, который имеет как минимум две модификации, одна модификация, для легких БВС, включает блок вычисления своих параметров полета, используя спутниковую навигационную систему, блок передачи параметров трафика своего полета и технического состояния БВС для информирования летательных аппаратов, находящихся в ближайшем пространстве, а также блок приема информации с других летательных аппаратов, находящихся в ближайшем пространстве, о трафиках их полета, причем радиосигнал дополнительно обрабатывается, например, используя принцип Доплера, для уточнения реальных координат других БВС, а в блоке обработки полученная информация о трафиках взаимного полета, а также аэронавигационные данные и пилотажно-навигационные характеристики, включая команды наземной службы контроля и управления за полетом БВС, преобразуются в команды управления трафиком полета, обеспечивая безопасный совместный полет, исключающий столкновение, а объем информации, обрабатываемой информационным блоком, определяется типом БВС, другая модификация информационного блока, для тяжелых БВС и пилотируемых летательных аппаратов, дополнительно снабжается системой ретрансляции о трафиках полета и техническом состоянии, поступающей на борт такого БВС с других летательных аппаратов, включая малые БВС для передачи, используя систему ретрансляции, в службу управления воздушным движением, которая использует эти данные для контроля управления полетом беспилотного авиационного судна и обеспечения возможности безаварийного продолжения полета, а также выявления случаев получения недостоверной информации о трафике полета с БВС, которые отклоняются от санкционированного трафика полета, а при необходимости, для обеспечения безопасности полетов, корректируют трафики полетов таких БВС, передавая через систему ретрансляции сигналы управления, а в случае невозможности корректировки полета БВС, например, когда недостоверная информация с БВС передается умышленно, то информация о времени потери управления с таким БВС и параметрах его движения, планируемом трафике полета, а также технические данные в режиме онлайн передаются в службу пресечения несанкционированного полета БВС.
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭКСПЛУАТАЦИЕЙ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ ДЛЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОГО ПОЛЕТА С ВЫЯВЛЕНИЕМ СЛУЧАЕВ НЕСАНКЦИОНИРОВАННОГО ИЗМЕНЕНИЯ ТРАФИКА ПОЛЕТА | 2017 |
|
RU2662611C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ И УПРАВЛЕНИЯ АВИАЦИОННЫМИ БЕСПИЛОТНЫМИ СИСТЕМАМИ | 2016 |
|
RU2647390C1 |
| СИСТЕМА РАЗДЕЛЕНИЯ ВОЗДУШНЫХ СУДОВ ПРИ ДВИЖЕНИИ | 2012 |
|
RU2601968C2 |
| US 9754496 B2, 05.09.2017 | |||
| Станок для калибровки деревянных заготовок | 1981 |
|
SU982910A1 |

