1. Область техники
Настоящее раскрытие относится в целом к воздушным судам и, в частности, к регулированию движения воздушных судов. Говоря еще точнее, настоящее раскрытие относится к способу и устройству для поддержания желаемого уровня разделения между воздушными судами.
2. Уровень техники
Служба управления воздушным движением используется для направления воздушных судов на земле и в воздухе. Эта служба может использоваться в управлении воздушными судами, такими как, например, беспилотные летательные аппараты, вертолеты и/или другие подходящие типы воздушных судов. В настоящее время управление воздушным движением обеспечивается находящимися на земле системами управления воздушным движением и диспетчерами воздушного движения. Обычно эти находящиеся на земле системы управления воздушным движением и диспетчеры воздушного движения предоставляют информацию пилотам и/или другим лицам, управляющим воздушным судном, которая может использоваться для контроля интенсивности движения воздушного транспорта на земле и в воздухе. Кроме того, пилоты и/или другие лица, управляющие воздушным судном, могут использовать эту информацию, а также свои собственные представления об обстановке для поддержания разделения между воздушными судами на земле и в воздухе.
Различные правила и нормы могут регламентировать желаемый уровень разделения между воздушным судном и другими воздушными судами. В некоторых случаях это разделение может быть определено как минимальное расстояние от воздушного судна в любом количестве направлений. Например, это разделение может быть определено как минимальное расстояние от воздушного судна в поперечном, вертикальном и/или продольном направлениях.
Управление воздушным движением может быть трудоемким и дорогостоящим. Например, системы управления воздушным движением могут требовать больше обрабатывающих ресурсов, персонала и/или других ресурсов, чем хотелось бы. Кроме того, несмотря на то, система управления воздушным движением может предоставлять инструкции воздушному судну для поддержания желаемого уровня разделения с другими воздушными судами, пилот воздушного судна по-прежнему ответственен за управление воздушным судном для действительного поддержания этого уровня разделения.
Кроме того, факторы, такие как, например, погодные условия, условия видимости, ограниченная осведомленность об обстановке, утомление, стресс, уровень опыта и/или другие соответствующие факторы, могут влиять на способность пилота воздушного судна принимать решения и осуществлять маневры воздушного судна для поддержания желаемого уровня разделения между воздушным судном и другими воздушными судами. Эти же факторы могут также влиять на способность диспетчеров воздушного движения предоставлять наиболее точную информацию и/или наиболее точные инструкции пилоту воздушного судна.
Таким образом, было бы полезно иметь способ и устройство, которые учитывают по меньшей мере некоторые из проблем, описанных выше, а также, возможно, другие проблемы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном предпочтительном варианте реализации предлагается способ регулирования разделения между транспортными средствами. Ближайшая точка сближения между первым транспортным средством, движущимся вдоль первого пути, и вторым транспортным средством, движущимся вдоль второго пути, прогнозируется. Некоторое количество компенсирующих команд для изменения первого пути первого транспортного средства генерируется с использованием ближайшей точки сближения и желаемого уровня разделения между первым транспортным средством и вторым транспортным средством. Указанное некоторое количество компенсирующих команд интегрируется с некоторым количеством управляющих команд для первого транспортного средства с целью формирования окончательного количества управляющих команд, сформированных для маневрирования первого транспортного средства для по существу поддержания желаемого уровня разделения между первым транспортным средством и вторым транспортным средством. Реакция первого транспортного средства на окончательное количество управляющих команд представляет собой желаемую реакцию.
Еще в одном предпочтительном варианте реализации система содержит модуль регулирования разделения. Модуль регулирования разделения выполнен с возможностью прогнозирования ближайшей точки сближения между первым транспортным средством, движущимся вдоль первого пути, и вторым транспортным средством, движущимся вдоль второго пути, с использованием первого пути и второго пути. Модуль регулирования разделения также выполнен с возможностью выработки некоторого количества компенсирующих команд для изменения первого пути первого транспортного средства с использованием ближайшей точки сближения и желаемого уровня разделения между первым транспортным средством и вторым транспортным средством. Модуль регулирования разделения также выполнен с возможностью интеграции указанного количества компенсирующих команд с некоторым количеством управляющих команд для первого транспортного средства с целью формирования окончательного количества управляющих команд, сформированных для маневрирования первого транспортного средства для по существу поддержания желаемого уровня разделения между первым транспортным средством и вторым транспортным средством. Реакция первого транспортного средства на окончательное количество управляющих команд представляет собой желаемую реакцию.
Указанные признаки, функции и преимущества могут быть получены независимо в различных вариантах реализации настоящего раскрытия или могут быть скомбинированы в других вариантах реализации, дополнительные подробности которых могут быть уяснены из нижеследующего описания и чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Являющиеся новыми характеризующие признаками предпочтительных вариантов реализации определены в прилагаемой формуле изобретения. Предпочтительные варианты реализации, при этом, а также предпочтительный способ использования, другие задачи и преимущества будут наилучшим образом уяснены из нижеследующего подробного описания предпочтительного варианта реализации настоящего раскрытия при его прочтении совместно с прилагаемыми чертежами, из которых
фигура 1 - иллюстрация среды для регулирования транспортных средств в форме блок-схемы согласно предпочтительному варианту реализации;
фигура 2 - иллюстрация границ для желаемых уровней разделения согласно предпочтительному варианту реализации;
фигура 3 - иллюстрация среды для регулирования воздушного движения согласно предпочтительному варианту реализации;
фигура 4 - иллюстрация еще одной среды для регулирования воздушного движения согласно предпочтительному варианту реализации;
фигура 5 - иллюстрация блок-схемы авиационной электронной системы, которая обеспечивает предотвращение столкновений, согласно предпочтительному варианту реализации;
фигура 6 - иллюстрация блок-схемы системы предотвращения столкновений согласно предпочтительному варианту реализации;
фигура 7 - иллюстрация уравнений для прогнозирования ближайшей точки сближения между двумя воздушными судами согласно предпочтительному варианту реализации;
фигура 8 - иллюстрация системы предотвращения столкновений с центром в транспортном средстве согласно предпочтительному варианту реализации;
фигура 9 - иллюстрация модуля предотвращения столкновений согласно предпочтительному варианту реализации;
фигура 10 - иллюстрация динамического генератора траектории согласно предпочтительному варианту реализации;
фигура 11 - иллюстрация системы для обеспечения предотвращения столкновений для воздушного судна согласно предпочтительному варианту реализации;
фигура 12 - иллюстрация компонента компенсации разделения согласно предпочтительному варианту реализации;
фигура 13 - иллюстрация сближения между двумя воздушными судами согласно предпочтительному варианту реализации;
фигура 14 - иллюстрация еще одного сближения между двумя воздушными судами согласно предпочтительному варианту реализации;
фигура 15 - иллюстрация сближения между двумя воздушными судами согласно предпочтительному варианту реализации;
фигура 16 - иллюстрация сближения между двумя воздушными судами согласно предпочтительному варианту реализации;
фигура 17 - иллюстрация двух воздушных судов, летящих в воздушном пространстве, согласно предпочтительному варианту реализации;
фигура 18 - иллюстрация схемы работы процесса регулирования транспортных средств согласно предпочтительному варианту реализации;
фигура 19 - иллюстрация обрабатывающей данные системы согласно предпочтительному варианту реализации; и
фигура 20 - иллюстрация вида сбоку воздушного судна согласно предпочтительному варианту реализации.
ПОДРОБНОЕ ОПИСАНИЕ
Различные предпочтительные варианты реализации различают и учитывают один или несколько разных факторов. Например, различные предпочтительные варианты реализации различают и учитывают то, что предотвращающие системы, в настоящее время используемые на воздушных судах, представляют собой дополнение к наблюдениям и указаниям, предоставляемым системой управления воздушным движением.
Различные предпочтительные варианты реализации различают и учитывают то, что в настоящее время имеющиеся предотвращающие системы могут предоставлять предупреждения воздушному судну, когда два или более воздушных судна летят слишком близко друг к другу. Кроме того, эти предотвращающие системы могут также предоставлять одному или более воздушному судну предлагаемый маневр, который может уменьшить риск столкновения. Однако различные предпочтительные варианты реализации различают и учитывают то, что может быть желательным иметь предотвращающую систему на воздушном судне, которая может управлять воздушным судном для уменьшения риска столкновения между этим воздушным и другим воздушным судном.
Кроме того, различные предпочтительные варианты реализации различают и учитывают то, что наличие предотвращающей системы, которая может управлять воздушным судном для уменьшения риска столкновения без необходимости входного сигнала от оператора воздушного судна, может быть желательным. Например, различные предпочтительные варианты реализации различают и учитывают то, что может быть желательным иметь предотвращающую систему, которая способна изменять путь полета воздушного судна и/или вынуждать воздушное судно выполнять маневры для уменьшения риска столкновения между этим воздушным судном и другим воздушным судном без необходимости входного сигнала оператора. В отношении этого типа предотвращающей системы различные предпочтительные варианты реализации различают и учитывают то, что вероятность человеческой ошибки и/или риск выполнения оператором маневра, который повысит риск столкновения, могут быть снижены.
Кроме того, различные предпочтительные варианты реализации различают и учитывают то, что использование предотвращающей системы на воздушном судне, которая может управлять воздушным судном для уменьшения риска столкновения без необходимости входного сигнала оператора, может снизить загруженность диспетчера воздушного движения и систем управления воздушным движением. В результате эти диспетчеры воздушного движения и системы управления воздушным движением могут регулировать полеты большего количества воздушных судов.
Кроме того, различные предпочтительные варианты реализации различают и учитывают то, что предотвращающая система, которая может управлять воздушным судном для уменьшения риска столкновения между этим воздушным судном и другим воздушным судном без необходимости входного сигнала оператора, может быть использована в беспилотных летательных аппаратах. В результате меньше обрабатывающих ресурсов и/или персонала может быть необходимо для мониторинга полета беспилотных летательных аппаратов, осуществляющих коммерческие и/или военные операции.
Таким образом, различные предпочтительные варианты реализации предоставляют способ и устройство для регулирования разделения между транспортными средствами. В одном предпочтительном варианте реализации предлагается способ регулирования разделения между транспортными средствами. Ближайшая точка сближения между первым транспортным средством, движущимся вдоль первого пути, и вторым транспортным средством, движущимся вдоль второго пути, прогнозируется. Некоторое количество компенсирующих команд для изменения первого пути первого транспортного средства генерируется с использованием ближайшей точки сближения и желаемого уровня разделения между первым транспортным средством и вторым транспортным средством. Указанное количество компенсирующих команд интегрируется с некоторым количеством управляющих команд для первого транспортного средства с целью формирования окончательного количества управляющих команд, сформированных для маневрирования первого транспортного средства по существу для поддержания желаемого уровня разделения между первым транспортным средством и вторым транспортным средством. Реакция первого транспортного средства на окончательное количество управляющих команд представляет собой желаемую реакцию.
Теперь рассмотрим фигуры, в частности, фигуру 1, на которой иллюстрация среды для регулирования транспортных средств в форме блок-схемы показана согласно предпочтительному варианту реализации. В этих иллюстрирующих примерах среда 100 для регулирования транспортных средств содержит множество транспортных средств 102. Транспортное средство из указанных транспортных средств 102 может быть выбрано одним из следующего: воздушное судно, беспилотный летательный аппарат, вертолет, подводная лодка, надводное судно, ракета, космический летательный аппарат, наземное транспортное средство или транспортное средство какого-либо иного подходящего типа.
В качестве одного иллюстрирующего примера, первое транспортное средство из указанных транспортных средств 102 может представлять собой первое воздушное судно 104, а второе транспортное средство из указанных транспортных средств 102 может представлять собой второе воздушное судно 105. Разделение 106 между первым воздушным судном 104 и вторым воздушным судном 105, в то время как по меньшей мере одно из этих транспортных средств находится в управляемом режиме, может быть отрегулировано с использованием модуля 112 для регулирования разделения. Модуль 112 может быть выполнен с использованием аппаратного обеспечения, программного обеспечения или сочетания того и другого.
В этих иллюстрирующих примерах модуль 112 может быть воплощен в вычислительной системе 108. Вычислительная система 108 имеет форму некоторого количества ЭВМ 110 в этих примерах. В настоящем документе термин «некоторое количество изделий» означает одно или более изделие. Например, «некоторое количество ЭВМ» означает одну или более ЭВМ. В зависимости от варианта реализации, некоторое количество ЭВМ 110 может быть расположено по меньшей мере в одном из следующего: первое воздушное судно 104, второе воздушное судно 105, другое транспортное средство из указанных транспортных средств 102, наземная станция, станция управления воздушным движением или некоторое другое подходящее место.
В настоящем документе выражение «по меньшей мере одно из следующего», когда оно используется с перечнем изделий, означает, что различные сочетания по меньшей мере одного из перечисленных изделий могут быть использованы, и лишь одно каждое изделие в перечне может быть необходимым. Например, «по меньшей мере одно из следующего: изделие А, изделие В и изделие С» может включать, например, без ограничения, изделие А либо изделие А и изделие В. Этот пример также может включать изделие А, изделие В и изделие С либо изделие В и изделие С. В других примерах «по меньшей мере одно из следующего» может представлять собой, например, без ограничения, два изделия А, одно изделие В и десять изделий С; четыре изделия В и семь изделий С; либо другие подходящие комбинации.
В этих показанных примерах вычислительная система 108 с модулем 112 расположена на первом воздушном судне 104. В частности, модуль 112 выполнен с возможностью обеспечения разделения 106 между первым воздушным судном 104 и другими транспортными средствами из указанных транспортных средств 102, когда первое воздушное судно 104 находится на земле и/или в воздухе.
В этих иллюстрирующих примерах первое воздушное судно 104 и второе воздушное судно 105 движутся в воздушном пространстве 114. Модуль 112 выполнен с возможностью обеспечения разделения 106 между первым воздушным судном 104 и вторым воздушным судном 105 для уменьшения риска столкновения 115 между первым воздушным судном 104 и вторым воздушным судном 105 в воздушном пространстве 114. Кроме того, модуль 112 может быть выполнен с возможностью обеспечения разделения 106 между первым воздушным судном 104 и другими транспортными средствами из указанных транспортных средств 102.
Как показано, модуль 112 устанавливает первый путь 116 для первого воздушного судна 104 и второй путь 118 для второго воздушного судна 105. Первый путь 116 может представлять собой первый путь полета для первого воздушного судна 104. Второй путь 118 может представлять собой второй путь полета для второго воздушного судна 105. В этих иллюстрирующих примерах информация, используемая в установлении пути для транспортного средства, может содержать по меньшей мере одно из следующего: вектор скорости, скорость, маршрут, направление движения, позиция, ориентация, угол тангажа, выбранная траектория, курс, скорость поворота, скорость набора высоты и другая подходящая информация для транспортного средства. Вектор скорости - это мера степени изменения и направления изменения позиции для транспортного средства. Таким образом, вектор скорости содержит как величину, так и направление для изменения в позиции транспортного средства. Величина вектора скорости - это скорость транспортного средства.
В этих иллюстрирующих примерах модуль 112 может устанавливать первый путь 116 для первого воздушного судна 104, используя информацию, получаемую из некоторого количества источников. Эти источники могут содержать, например, по меньшей мере одно из следующего: система 111 управления полетами на борту первого воздушного судна 104, система 113 датчиков на борту первого воздушного судна 104, система управления воздушным движением и другие подходящие источники информации.
Система 111 управления полетами может содержать по меньшей мере одно из следующего: система автоматического пилотирования, система управления полетами, пилотажный командный прибор, навигационная система, некоторое количество подходящих систем, используемых для управления работой первого воздушного судна 104. В одном иллюстрирующем примере модуль 112 может устанавливать первый путь 116, используя предварительно определенные пути полета, хранящиеся в навигационной системе в системе 111 управления полетами.
Далее, система 113 датчиков на борту первого воздушного судна 104 содержит некоторое количество датчиков. Эти датчики могут содержать, например, без ограничения, по меньшей мере одно из следующего: блок глобальной системы позиционирования, инерциальный измерительный блок, система камер, радарная система, система наблюдения, лазерный измеритель расстояния, система установления местоположения, альтиметр и другие подходящие типы датчиков. В некоторых иллюстрирующих примерах модуль 112 может устанавливать первый путь 116 первого воздушного судна 104, используя данные датчиков, генерируемые системой 113 датчиков.
Далее, модуль 112 также может устанавливать второй путь 118 для второго воздушного судна 105, используя информацию, получаемую из некоторого количества различных источников. Эти источники могут содержать, например, без ограничения, по меньшей мере одно из следующего: система для регулирования полетов на борту второго воздушного судна 105, система датчиков на борту второго воздушного судна 105, система 113 датчиков на борту первого воздушного судна 104, система управления воздушным движением и другие подходящие источники информации.
В одном иллюстрирующем примере второй путь 118 для второго воздушного судна 105 может быть установлен с использованием предварительно определенных путей полета для второго воздушного судна 105, принимаемых от второго воздушного судна 105 и/или системы управления воздушным движением. В еще одном иллюстрирующем примере второй путь 118 может быть установлен с использованием данных датчиков, генерируемых системой 113 датчиков на борту первого воздушного судна 104.
Как показано в этом примере, первый путь 116 содержит первый вектор 122 скорости для первого воздушного судна 104. Второй путь 118 содержит второй вектор 124 скорости для второго воздушного судна 105. В некоторых иллюстрирующих примерах модуль 112 может также быть выполнен с возможностью установления относительного вектора 119 скорости. Относительный вектор 119 скорости может представлять собой вектор скорости второго воздушного судна 105 относительно первого воздушного судна 104 или вектор скорости первого воздушного судна 104 относительно второго воздушного судна 105, в зависимости от варианта реализации.
Модуль 112 прогнозирует ближайшую точку 121 сближения между первым воздушным судном 104 и вторым воздушным судном 105, используя первый путь 116 для первого воздушного судна 104 и второй путь 118 для второго воздушного судна 105. В этих иллюстрирующих примерах прогнозируется, что ближайшая точка 121 сближения между первым воздушным судном 104, движущимся на первом пути 116, и вторым воздушным судном 105, движущимся на втором пути 118, возникнет, когда расстояние 123 между первым воздушным судном 104 и вторым воздушным судном 105 имеет минимальное значение, если первое воздушное судно 104 продолжает движение вдоль первого пути 116, а второе воздушное судно 105 продолжает движение вдоль второго пути 118.
Иными словами, в прогнозировании ближайшей точки 121 сближения модуль 112 прогнозирует наименьшее расстояние 123 между первым воздушным судном 104 и вторым воздушным судном 105, которое ожидается, если первое воздушное судно 104 продолжает движение вдоль первого пути 116, а второе воздушное судно 105 продолжает движение вдоль второго пути 118. Расстояние 123 между первым воздушным судном 104 и вторым воздушным судном 105, прогнозируемое в ближайшей точке 121 сближения, может также называться дистанцией пролета.
Кроме того, в прогнозировании ближайшей точки 121 сближения модуль 112 также прогнозирует направление 127 второго воздушного судна 105 по отношению к первому воздушному судну 104. Направление 127 - это направление второго воздушного судна 105 по отношению к первому воздушному судну 104, когда расстояние 123 между первым воздушным судном 104 и вторым воздушным судном 105 прогнозируется иметь минимальное значение.
В этих иллюстрирующих примерах расстояние 123 и направление 127 в ближайшей точке 121 сближения определяют вектор дальности между первым воздушным судном 104 и вторым воздушным судном 105 в ближайшей точке 121 сближения. Этот вектор дальности представляет собой наименьший вектор дальности, который прогнозируется возникнуть между этими двумя воздушными судами, когда эти два воздушных судна движутся вдоль их соответствующих курсов. Далее, этот вектор дальности может быть представлен как вектор, имеющий величину, которая представляет собой расстояние 123 в ближайшей точке 121 сближения, и направление, которое представляет собой направление 127 в ближайшей точке 121 сближения. Таким образом, ближайшая точка 121 сближения может быть представлена как вектор.
Кроме того, модуль 112 также прогнозирует время 120 до ближайшей точки сближения, используя первый путь 116 для первого воздушного судна 104 и второй путь 118 для второго воздушного судна 105. Время 120 до ближайшей точки 121 сближения - это период времени от настоящего времени до времени, в которое ближайшая точка 121 сближения возникнет. Иными словами, время 120 - это период времени от настоящего времени до времени, в которое расстояние 123 между первым воздушным судном 104 и вторым воздушным судном 105 имеет минимальное значение. В этих иллюстрирующих примерах время 120 до ближайшей точки 121 сближения может также называться оставшимся временем до ближайшей точки 121 сближения.
В некоторых иллюстрирующих примерах расстояние 123 в ближайшей точке 121 сближения может прогнозироваться с использованием времени 120 до ближайшей точки 121 сближения, которое было спрогнозировано. В других иллюстрирующих примерах время 120 до ближайшей точки сближения может прогнозироваться с использованием расстояния 123 между первым воздушным судном 104 и вторым воздушным судном 105, которое было спрогнозировано.
В этих иллюстрирующих примерах текущий вектор 125 дальности также используется в прогнозировании ближайшей точки 121 сближения между первым воздушным судном 104 и вторым воздушным судном 105. Текущий вектор 125 дальности содержит текущее расстояние 126 между первым воздушным судном 104 и вторым воздушным судном 105 и текущее направление 129 второго воздушного судна 105 по отношению к первому воздушному судну 104.
В одном иллюстрирующем примере текущий вектор 125 дальности может быть установлен с использованием текущей позиции первого воздушного судна 104 и текущей позиции второго воздушного судна 105. В некоторых иллюстрирующих примерах текущий вектор 125 дальности может быть установлен без необходимости установления позиций второго воздушного судна 105 и первого воздушного судна 104. Например, текущий вектор 125 дальности может быть установлен с использованием радарной системы, лазерного измерителя расстояния и/или некоторых других типов систем установления вектора дальности.
Желаемый уровень 128 разделения может в текущий момент иметься между первым воздушным судном 104 и вторым воздушным судном 105 на основании текущего вектора 125 дальности между первым воздушным судном 104 и вторым воздушным судном 105. Однако по мере того, как первое воздушное судно 104 и второе воздушное судно 105 движутся вдоль первого пути 116 и второго пути 118, соответственно, желаемый уровень 128 разделения между первым воздушным судном 104 и вторым воздушным судном 105 может быть нарушен. Это нарушение желаемого уровня 128 разделения может называться нарушением разделения между первым воздушным судном 104 и вторым воздушным судном 105.
В этих изображенных примерах модуль 112 выполняет определение того, прогнозируются ли первое воздушное судно 104 и второе воздушное судно 105 иметь желаемый уровень 128 разделения между первым воздушным судном 104 и вторым воздушным судном 105 в ближайшей точке 121 сближения. Иными словами, модуль 112 определяет, обеспечивает ли расстояние 123 между первым воздушным судном 104 и вторым воздушным судном 105 в ближайшей точке 121 сближения желаемый уровень 128 разделения.
Желаемый уровень 128 разделения выбирается таким образом, чтобы уменьшить и/или устранить риск столкновения 115 между первым воздушным судном 104 и вторым воздушным судном 105. Иными словами, желаемый уровень 128 разделения может быть выбран таким образом, что вероятность столкновения между первым воздушным судном 104 и вторым воздушным судном 105 может быть уменьшена и/или устранена. Определение того, что расстояние 123, прогнозируемое в ближайшей точке 121 сближения, не обеспечивает желаемый уровень 128 разделения, показывает, что в некоторой точке во время полетов первого воздушного судна 104 и второго воздушного судна 105 может возникать нарушение разделения. Модуль 112 может управлять первым воздушным судном 104 таким образом, что желаемый уровень 128 разделения поддерживается, и возникновение нарушения разделения предотвращено.
Например, модуль 112 может быть выполнен с возможностью выработки некоторого количества компенсирующих команд 130 для первого воздушного судна 104. В этих иллюстрирующих примерах некоторое количество компенсирующих команд 130 может также называться некоторым количеством предотвращающих команд.
Некоторое количество компенсирующих команд 130 может быть сконфигурировано для вынуждения первого воздушного судна 104 изменять первый путь 116. Например, некоторое количество компенсирующих команд 130 может быть сконфигурировано для изменения первого пути 116 для первого воздушного судна 104 для увеличения расстояния 123 между первым воздушным судном 104 и вторым воздушным судном 105, прогнозируемого в ближайшей точке 121 сближения. Увеличение расстояния 123 между первым воздушным судном 104 и вторым воздушным судном 105, прогнозируемого в ближайшей точке 121 сближения, может обеспечить желаемый уровень 128 разделения в ближайшей точке 121 сближения.
Например, некоторое количество компенсирующих команд 130 может вынуждать первое воздушное судно 104 выполнять набор 132 маневров для поддержания желаемого уровня 128 разделения между первым воздушным судном 104 и вторым воздушным судном 105. В настоящем документе термин «набор единиц» означает ноль или более единиц. Например, «набор маневров» означает ноль, один или более маневров. Кроме того, набор может представлять собой пустой или нулевой набор.
Маневр в наборе 132 маневров может быть выбран один по меньшей мере из следующего: маневр поворота, маневр набора высоты, маневр снижения, вираж, маневр ускорения, маневр замедления и маневры других подходящих типов. В этих иллюстрирующих примерах набор 132 маневров может представлять собой пустой набор, когда желаемый уровень 128 разделения обеспечен в ближайшей точке 121 сближения, прогнозируемой между первым воздушным судном 104 и вторым воздушным судном 105.
В этих иллюстрирующих примерах некоторое количество компенсирующих команд 130 интегрируется с некоторым количеством управляющих команд 133, генерируемых системой 111 управления полетами для управления работой первого воздушного судна 104. Некоторое количество управляющих команд 133 содержит команды, которые управляют полетом первого воздушного судна 104 в воздушном пространстве 114.
Например, некоторое количество управляющих команд 133 может содержать по меньшей мере одно из следующего: команда ускорения набора высоты, команда скорости поворота, команда скорости набора высоты, команда высоты над уровнем моря, команда по тангажу, команда по курсу, команда по крену, команда ускорения, команда замедления, команда поперечного ускорения и другие подходящие команды. Таким образом, некоторое количество управляющих команд 133 сконфигурировано для маневрирования первого воздушного судна 104 в воздушном пространстве 114.
Некоторое количество компенсирующих команд 130 может быть интегрировано с некоторым количеством управляющих команд 133 для настройки некоторого количества управляющих команд 133 таким образом, что первое воздушное судно 104 выполняет набор 132 маневров. Например, модуль 112 может генерировать некоторое количество компенсирующих команд 130, которые могут быть интегрированы с некоторым количеством управляющих команд 133 для замены первого пути 116 для первого воздушного судна 104 новым путем 131. Новый путь 131 может также называться измененным путем полета. Новый путь 131 может содержать по меньшей мере одно из следующего: новый вектор скорости, новая скорость, новый маршрут, новое направление движения для первого воздушного судна 104.
В этих иллюстрирующих примерах интеграция некоторого количества компенсирующих команд 130 с некоторым количеством управляющих команд 133 может формировать окончательное количество управляющих команд 143, которые используются для маневрирования первого транспортного средства 104 для по существу поддержания желаемого уровня 128 разделения между первым воздушным судном 104 и вторым воздушным судном 105. В частности, эта интеграция может быть осуществлена таким образом, что реакция первого воздушного судна 104 на окончательное количество управляющих команд 143 представляет собой желаемую реакцию 145. В частности, окончательное количество управляющих команд 143 сконфигурировано для производства желаемой реакции 145 первым воздушным судном 104.
Иными словами, некоторое количество компенсирующих команд 130 интегрируется с некоторым количеством управляющих команд 133 таким образом, что первое воздушное судно 104 осуществляет набор 132 маневров желаемым образом. Таким образом, желаемая реакция 145 может также называться желаемой маневренной реакцией для первого воздушного судна 104.
Желаемая реакция 145 может содержать, например, без ограничения, по меньшей мере одно из следующего: желаемые ходовые качества для полета первого воздушного судна 104, желаемый уровень удобства пассажиров во время полета, желаемый диапазон ускорения, желаемое время реакции, желаемая скорость поворота и другие подходящие факторы в реакции первого воздушного судна 104. Желаемое время реакции может представлять собой, например, то, как быстро от первого воздушного судна 104 требуется отреагировать на окончательное количество управляющих команд 143. В некоторых случаях желаемое время реакции может представлять собой то, как быстро от первого воздушного судна 104 требуется инициировать набор 132 маневров после того, как окончательное количество управляющих команд 143 было выдано.
Кроме того, в некоторых случаях желаемая реакция 145 воздушного судна может также включать желаемое время, в течение которого путь 116 полета воздушного судна 104 должен быть изменен так, чтобы новое разделение, прогнозируемое между первым воздушным судном 104 и вторым воздушным судном 105 в новой прогнозируемой ближайшей точке сближения, обеспечивало желаемый уровень 128 разделения. В других случаях желаемая реакция 145 может включать желаемое время, после которого первый путь 116 должен быть восстановлен после того, как желаемый уровень 128 разделения был обеспечен в прогнозируемой ближайшей точке сближения.
В этих иллюстрирующих примерах модуль 112 выполнен с возможностью мониторинга разделения 106 между первым воздушным судном 104 и другими транспортными средствами из указанных транспортных средств 102 непрерывно. В других иллюстрирующих примерах разделение 106 может подвергаться мониторингу периодически. Например, модуль 112 может быть выполнен с возможностью мониторинга разделения 106 между первым воздушным судном 104 и вторым воздушным судном 105 каждую десятую долю секунды, каждую секунду, каждые несколько секунд или на основании некоторого другого подходящего периода времени.
В одном иллюстрирующем примере модуль 112 может осуществлять операции установления второго пути 118 для второго воздушного судна 105, прогнозирования ближайшей точки 121 сближения и определения того, обеспечен ли желаемый уровень 128 разделения в ближайшей точке 121 сближения, каждую десятую долю секунды. В других иллюстрирующих примерах эти операции могут инициироваться, выключаться и/или подвергаться влиянию человека-оператора для первого воздушного судна 104.
Как показано, желаемый уровень 128 разделения может быть выбран из одного из следующего: требуемый уровень 136 разделения, безопасный уровень 138 разделения и задаваемый уровень 140 разделения. Требуемый уровень 136 разделения может быть основан на требованиях и/или правилах, предоставляемых, например, без ограничения, системой управления воздушным движением.
Кроме того, требуемый уровень 136 разделения может быть основан на некоторых факторах в дополнение и/или вместо требований и/или правил, предоставляемых системой управления воздушным движением. Эти факторы могут содержать, например, без ограничения, тип воздушного судна и/или класс воздушного судна, рабочие параметры, размер, текущая фаза полета, запланированные фазы полета, высота над уровнем моря и/или другие подходящие факторы, относящиеся к первому воздушному судну 104 и/или второму воздушному судну 105.
В этих иллюстрирующих примерах параметры, используемые для определения требуемого уровня 136 разделения, могут оставаться по существу постоянными для полета первого воздушного судна 104. В других иллюстрирующих примерах параметры, используемые для определения требуемого уровня 136 разделения, могут изменяться во время полета первого воздушного судна 104. Например, требуемый уровень 136 разделения может изменяться во время полета первого воздушного судна 104 в ответ на изменения в погодных условиях, условиях видимости, изменения в окружающей обстановке, изменение задачи для первого воздушного судна 104, в различных частях воздушного пространства 114 и/или в ответ на другие типы событий.
Безопасный уровень 138 разделения представляет собой более высокий уровень разделения, чем требуемый уровень 136 разделения. Безопасный уровень 138 разделения содержит требуемый уровень 136 разделения и дополнительную величину разделения. Эта дополнительная величина разделения может учитывать любую неопределенность или ошибку по отношению к прогнозированию ближайшей точки 121 сближения. В частности, безопасный уровень 138 разделения учитывает любую неопределенность, которая может иметься в прогнозировании расстояния 123 в ближайшей точке 121 сближения.
Далее, задаваемый уровень 140 разделения представляет собой более высокий уровень разделения, чем безопасный уровень 138 разделения. Задаваемый уровень 140 разделения содержит безопасный уровень 138 разделения и дополнительную величину разделения. Эта дополнительная величина разделения может учитывать любую прогнозируемую ошибку в реакции первого воздушного судна 104 на изменение первого пути 116, инициируемое модулем 112.
Иллюстрация среды 100 для регулирования транспортных средств на фигуре 1 не имеет целью внести физические или архитектурные ограничения в способ, которым предпочтительный вариант реализации может быть воплощен. Другие компоненты в дополнение и/или вместо тех, что изображены, могут быть использованы. Некоторые компоненты могут быть ненужными. Кроме того, блоки представлены для иллюстрации некоторых функциональных компонентов. Один или более из этих блоков могут быть скомбинированы и/или быть разделены на разные блоки при воплощении в предпочтительном варианте реализации.
Например, в других иллюстрирующих примерах модуль 112 может быть выполнен с возможностью регулирования разделения 106 между первым воздушным судном 104 и дополнительными воздушными судами в дополнение к второму воздушному судну 105 из указанных транспортных средств 102 и/или вместо него. Кроме того, в некоторых иллюстрирующих примерах первое воздушное судно 104 может быть неподвижным или движущимся на земле, в то время как второе воздушное судно 105 летит в воздушном пространстве 114.
В других иллюстрирующих примерах желаемый уровень 128 разделения может определяться по отношению ко второму воздушному судну 105 вместо первого воздушного судна 104. Например, желаемый уровень 128 разделения может определяться как расстояние от второго воздушного судна 105, которое первое воздушное судно 104 должно поддерживать при движении в воздушном пространстве 114. Кроме того, в других иллюстрирующих примерах время 120 может представлять собой фактическое время, в которое ближайшая точка 121 сближения может возникнуть, а не период времени до ближайшей точки 121 сближения по отношению к текущему времени.
Теперь рассмотрим фигуру 2, на которой иллюстрация границ для желаемых уровней разделения показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере границы 200 определяют различные уровни разделения, которые могут быть желаемыми между первым воздушным судном 202 и другим воздушным судном, движущимися в воздушном пространстве 203.
Первое воздушное судно 202 и второе воздушное судно 204 представляют собой воплощения для первого воздушного судна 104 и второго воздушного судна 105, соответственно, из фигуры 1. В этом иллюстрирующем примере модуль 112 из фигуры 1 может быть выполнен с возможностью регулирования разделения между первым воздушным судном 202 и вторым воздушным судном 204, когда первое воздушное судно 202 и второе воздушное судно 204 движутся в воздушном пространстве 203.
Как показано, границы 200 для первого воздушного судна 202 определены по отношению ко второму воздушному судну 204. Например, границы 200 включают границу 206, границу 208 и границу 210. Эти границы определяют часть воздушного пространства 203 по отношению ко второму воздушному судну 204, в котором первое воздушное судно 202 и второе воздушное судно 204 не должны одновременно находиться.
Например, граница 206 обеспечивает требуемый уровень разделения между первым воздушным судном 202 и вторым воздушным судном 204. Этот уровень разделения представляет собой пример требуемого уровня 136 разделения из фигуры 1. Граница 206 находится на расстоянии 207 от второго воздушного судна 204. Расстояние 207 представляет собой требуемое расстояние, mrecuired, для разделения между вторым воздушным судном 204 и первым воздушным судном 202. Иными словами, расстояние 207 - это минимальное расстояние от второго воздушного судна 204, которое должно поддерживаться первым воздушным судном 202 для обеспечения требуемого уровня разделения между первым воздушным судном 202 и вторым воздушным судном 204.
В этих иллюстрирующих примерах расстояние 207 может быть выбрано, например, пилотом первого воздушного судна 202, системой управления воздушным движением, авиакомпанией, которой принадлежит первое воздушное судно 202, или любой другой подходящей инстанцией. Расстояние 207 может быть выбрано на основании факторов, таких как, например, правила безопасности, размер первого воздушного судна 202, рабочие параметры для первого воздушного судна 202, маневренные качества первого воздушного судна 202, тип задачи, выполняемой первым воздушным судном 202, и/или других подходящих факторов.
Граница 208 обеспечивает безопасный уровень разделения между первым воздушным судном 202 и вторым воздушным судном 204. Этот уровень разделения представляет собой пример безопасного уровня 138 разделения из фигуры 1. Граница 208 находится на расстоянии 209 от второго воздушного судна 204. Расстояние 209 представляет собой безопасное расстояние, msafe, для разделения между вторым воздушным судном 204 и первым воздушным судном 202. Иными словами, расстояние 209 представляет собой расстояние от второго воздушного судна 204, которое должно поддерживаться первым воздушным судном 202 для обеспечения безопасного уровня разделения между первым воздушным судном 202 и вторым воздушным судном 204.
В этих иллюстрирующих примерах расстояние 209 может вычисляться модулем 112 из фигуры 1 с использованием расстояния 207. Например, расстояние 209 может быть вычислено как сумма требуемого расстояния и произведения оцененной неопределенности и коэффициента усиления. Иными словами, расстояние 209 может быть вычислено с использованием следующего уравнения:

где km - это коэффициент усиления, σm - это оцененная неопределенность.
Оцененная неопределенность - это оценка неопределенности в прогнозировании ближайшей точки сближения между первым воздушным судном 202 и вторым воздушным судном 204. В частности, оцененная неопределенность - это оценка неопределенности в расстоянии 220, прогнозируемом между первым воздушным судном 202 и вторым воздушным судном 204 в ближайшей точке сближения, прогнозируемой между первым воздушным судном 202 и вторым воздушным судном 204. Расстояние 220 также называется дистанцией пролета, m, в ближайшей точке сближения между первым воздушным судном 202 и вторым воздушным судном 204.
В этих иллюстрирующих примерах неопределенность может быть основана на отклонениях, которые возникают во время полетов первого воздушного судна 202 и второго воздушного судна 204. Эти отклонения могут содержать, например, отклонения в векторе дальности между первым воздушным судном 202 и вторым воздушным судном 204, маршруте первого воздушного судна 202 и/или второго воздушного судна 204, относительном векторе скорости второго воздушного судна 204 по отношению к первому воздушному судну 202 и/или других параметрах. Эти отклонения могут возникать в ответ, например, без ограничения, на погодные условия, ветровые условия, шум датчика, ошибки слежения и/или другие подходящие факторы.
Кроме того, эта неопределенность может быть основана на оцененных ошибках в установлении пути полета для первого воздушного судна 202 и пути полета для второго воздушного судна 204. Эти ошибки могут содержать, например, ошибки, оцененные для установления векторов скоростей и позиций первого воздушного судна 202 и/или второго воздушного судна 204.
Граница 210 обеспечивает задаваемый уровень разделения между первым воздушным судном 202 и вторым воздушным судном 204. Этот уровень разделения представляет собой пример задаваемого уровня 140 разделения из фигуры 1. В этом иллюстрирующем примере этот задаваемый уровень разделения представляет собой уровень разделения, желаемый между первым воздушным судном 202 и вторым воздушным судном 204. Однако в других иллюстрирующих примерах требуемый уровень разделения и/или безопасный уровень разделения могут быть выбраны в качестве желаемого уровня разделения.
Граница 210 находится на расстоянии 211 от второго воздушного судна 204. Расстояние 211 представляет собой задаваемое расстояние, mimposed, для разделения между вторым воздушным судном 204 и первым воздушным судном 202. Расстояние 211 - это безопасное расстояние, msafe, разделенное на коэффициент усиления реакции установившегося состояния, CSS, для системы, используемой для установления ближайшей точки сближения. Иными словами, расстояние 209 представляет собой

В этом иллюстрирующем примере вектор 212 скорости представляет скорость первого воздушного судна 202. Далее, относительный вектор 214 скорости представляет относительную скорость первого воздушного судна 202 по отношению ко второму воздушному судну 204 в этом иллюстрирующем примере.
Как показано, вектор 216 дальности показывает расстояние между первым воздушным судном 202 и вторым воздушным судном, а также направление позиции второго воздушного судна 204 относительно позиции первого воздушного судна 202. Угол 218 - это угол, сформированный относительным вектором 214 скорости и вектором 216 дальности.
В этом иллюстрирующем примере, если первое воздушное судно 212 и второе воздушное судно 204 продвигаются по их соответствующим путям полета при тех же скоростях, время до ближайшей точки сближения, прогнозируемой между этими двумя воздушными судами, может быть определено следующим образом:

где tcpa - это время до ближайшей точки сближения, R - это величина вектора 216 дальности, θ - это угол 218, a Vrelative - это величина относительного вектора 214 скорости.
Как показано, вектор 221 представляет ближайшую точку сближения между первым воздушным судном 202 и вторым воздушным судном 204. Величина вектора 221 - это расстояние 220. Как описано ранее, расстояние 220 - это дистанция пролета, т, между первым воздушным судном 202 и вторым воздушным судном 204. Иными словами, расстояние 220 - это расстояние первого воздушного судна 202 от второго воздушного судна 204, прогнозируемое для времени ближайшей точки сближения.
Когда расстояние 220 меньше, чем расстояние 211, желаемый уровень разделения в ближайшей точке сближения не прогнозируется. Расстояние, необходимое для получения желаемого уровня разделения в ближайшей точке сближения, может быть вычислено как дистанция пролета, вычтенная из задаваемого расстояния. Это расстояние может также называться восстановительным расстоянием. В частности, восстановительное расстояние - это дополнительное расстояние от второго воздушного судна 204, необходимое для восстановления желаемого уровня разделения. Восстановительное расстояние может быть задано следующим уравнение:

В этих иллюстрирующих примерах команды могут генерироваться, которые вынуждают первое воздушное судно 202 изменять его путь полета таким образом, что желаемый уровень разделения поддерживается между первым воздушным судном 202 и вторым воздушным судном 204. Первое воздушное судно 202 может изменять путь своего полета путем изменения маршрута, набора высоты, снижения, поворота, замедления, набора скорости или осуществления какой-либо иной подходящей операции.
Рассмотрим фигуру 3, на которой иллюстрация среды для регулирования воздушного движения показана согласно предпочтительному варианту реализации.
Среда 300 для регулирования воздушного движения - это пример одного воплощения для среды 100 для регулирования транспортных средств из фигуры 1.
Как изображено, первое воздушное судно 302 и второе воздушное судно 304 движутся в воздушном пространстве 305 в среде 300. Первое воздушное судно 302 может представлять собой пример одного воплощения для первого воздушного судна 104 из фигуры 1. Второе воздушное судно 304 может представлять собой пример одного воплощения для второго воздушного судна 105 из фигуры 1.
Первое воздушное судно 302 может быть оборудовано системой предотвращения столкновений, называемой системой предотвращения столкновений с центром в транспортном средстве. Система предотвращения столкновений с центром в транспортном средстве представляет собой систему, сконфигурированную для конкретного транспортного средства, на котором эта система расположена. Система предотвращения столкновений с центром в транспортном средстве в первом воздушном судне 302 может содержать модуль для регулирования разделения, такой как модуль 112 из фигуры 1, выполненный с возможностью для уменьшения риска столкновения между первым воздушным судном 302 и вторым воздушным судном 304. Например, система предотвращения столкновений с центром в транспортном средстве на первом воздушном судне 302 может быть сконфигурирована для вынуждения первого воздушного судна 302 осуществлять маневры уклонения для предотвращения столкновения со вторым воздушным судном 304 и/или другим воздушным судном (не показано) в среде 300.
Как показано, первое воздушное судно 302 движется по пути 306 полета в воздушном пространстве 305, в то время как второе воздушное судно 304 движется по пути 308 полета в воздушном пространстве 305. В этом иллюстрирующем примере первое воздушное судно 302 в данный момент находится в позиции 307 вдоль пути 306 полета, а второе воздушное судно 304 в данный момент находится в позиции 309 вдоль пути 308 полета.
Система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 может быть сконфигурирована для прогнозирования ближайшей точки 310 сближения (БТС) между первым воздушным судном 302 и вторым воздушным судном 304 по отношению к первому воздушному судну 302. Ближайшая точка 310 сближения показывает наименьший вектор дальности между первым воздушным судном 302 и вторым воздушным судном 304, который прогнозируется возникнуть, когда первое воздушное судно 302 и второе воздушное судно 304 продолжают путь 306 полета и путь 308 полета, соответственно.
Как показано, прогнозируется, что ближайшая точка 310 сближения возникнет, когда первое воздушное судно 302 находится в прогнозируемой позиции 320 вдоль пути 306 полета, а второе воздушное судно 304 находится в прогнозируемой позиции 322 вдоль пути 308 полета. Ближайшая точка 310 сближения может быть представлена как вектор дальности, имеющий как величину, так и направление по отношению к первому воздушному судну 302. В этих иллюстрирующих примерах величина этого вектора показывает расстояние между первым воздушным судном 302 и вторым воздушным судном 304 в ближайшей точке 310 сближения. Иными словами, величина вектора - это расстояние между прогнозируемой позицией 320 для первого воздушного судна 302 и прогнозируемой позицией 322 для второго воздушного судна 304. Как описано ранее, расстояние между первым воздушным судном 302 и вторым воздушным судном 304 в ближайшей точке 310 сближения может также быть названо дистанцией пролета между этими двумя воздушными судами в ближайшей точке 310 сближения.
Далее, направление вектора для ближайшей точки 310 сближения показывает направление прогнозируемой позиции 322 для второго воздушного судна 304 в ближайшей точке 310 сближения по отношению к прогнозируемой позиции 320 для первого воздушного судна 302.
Кроме того, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 может прогнозировать время до ближайшей точки 310 сближения. Иными словами, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 может прогнозировать время, в которое ближайшая точка 310 сближения между первым воздушным судном 302 и вторым воздушным судном 304 прогнозируется возникнуть. В некоторых иллюстрирующих примерах время до ближайшей точки 310 сближения может называться прогнозируемым оставшимся временем или прогнозируемым временным периодом до того, как первое воздушное судно 302 достигнет ближайшей точки 310 сближения.
В этих иллюстрирующих примерах выполнение прогнозирования ближайшей точки 310 сближения может содержать установление текущего вектора дальности между первым воздушным судном 302 и вторым воздушным судном 304. Текущий вектор дальности включает текущее расстояние между первым воздушным судном 302 в позиции 307 и вторым воздушным судном 304 в позиции 309. Кроме того, текущий вектор дальности может включать направление позиции 309 для второго воздушного судна 304 по отношению к позиции 307 для первого воздушного судна 302.
Как изображено, периметр 316 разделения может быть предварительно определен в системе предотвращения столкновений с центром в транспортном средстве воздушного судна 302. Периметр 316 разделения может представлять собой границу, которая определяет желаемый уровень разделения по отношению к первому воздушному судну 302. В некоторых иллюстрирующих примерах эта граница может находиться на расстоянии от первого воздушного судна 302, которое по существу равно во всех направлениях. Когда периметр 316 разделения является трехмерным, периметр 316 разделения может также называться слоем периметра разделения. Например, периметр 316 разделения может быть определен как трехмерный слой или трехмерная поверхность вокруг первого воздушного судна 302 в форме сферы.
Таким образом, периметр 316 разделения показывает расстояние от первого воздушного судна в любом количестве направлений, которое обеспечивает желаемый уровень разделения между первым воздушным судном 302 и другим воздушным судном в воздушном пространстве 305. Система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 выполнена с возможностью поддержания этого желаемого уровня разделения между первым воздушным судном 302 и другим воздушным судном.
Соответственно, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 может генерировать предотвращающие команды, когда вектор дальности между первым воздушным судном 302 и вторым воздушным судном 304 в ближайшей точке 310 сближения находится внутри предварительно определенного периметра 316 разделения, или нарушает предварительно определенный периметр 316 разделения. Иными словами, предотвращающие команды могут генерироваться, когда прогнозируемая позиция 322 второго воздушного судна 304 во время ближайшей точки 310 сближения находится внутри периметра 316 разделения для первого воздушного судна 302 по отношению к прогнозируемой позиции 320 для первого воздушного судна 302 во время ближайшей точки 310 сближения.
В некоторых иллюстрирующих примерах предотвращающие команды могут генерироваться, лишь когда время до ближайшей точки сближения находится внутри выбранных временных границ. Например, если время до ближайшей точки 310 сближения составляет более пяти минут, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 может не генерировать предотвращающие команды до тех пор, пока время до ближайшей точки 310 сближения не достигнет приблизительно одной минуты.
Предотвращающие команды, которые генерируются, могут быть сформированы для изменения пути 306 полета первого воздушного судна 302. В некоторых случаях предотвращающие команды, которые генерируются, могут также изменять скорость воздушного судна.
Например, система предотвращения столкновений с центром в транспортном средстве воздушного судна 302 может генерировать одну или более предотвращающую команду, которая вынуждает первое воздушное судно 302 реактивно заменить путь 306 полета первого воздушного судна 302 измененным путем 314 полета в ответ на то, что прогнозируемая позиция 322 для второго воздушного судна 304 находится внутри периметра 316 разделения, когда первое воздушное судно имеет прогнозируемую позицию 320. Таким образом, система предотвращения столкновений с центром в транспортном средстве в первом воздушном судне 302 может автоматически обеспечивать, что надлежащее разделение, как определено периметром 316 разделения, поддерживается между первым воздушным судном 302 и вторым воздушным судном 304 по существу все время.
Когда путь 306 полета первого воздушного судна 302 заменен измененным путем 314 полета, система предотвращения столкновений с центром в транспортном средстве в первом воздушном судне 302 прогнозирует новую ближайшую точку сближения между первым воздушным судном 302 и вторым воздушным судном 304, которая отлична от ближайшей точки 310 сближения. Новая ближайшая точка сближения прогнозируется возникнуть, когда первое воздушное судно 302 находится в прогнозируемой позиции 324 вдоль измененного пути 314 полета.
Часть воздушного пространства 305, определенная внутри периметра 316 разделения, когда первое воздушное судно 302 находится в прогнозируемой позиции 324 вдоль измененного пути 314 полета, отлична от части воздушного пространства 305, определенной внутри периметра 316 разделения, когда первое воздушное судно 302 находится в прогнозируемой позиции 320 вдоль пути 306 полета. Измененный путь 314 полета для первого воздушного судна 302 может быть выбран таким образом, что прогнозируемая позиция для второго воздушного судна 304 при новой ближайшей точке сближения находится снаружи периметра 316 разделения для первого воздушного судна 302, когда первое воздушное судно 302 находится в прогнозируемой позиции 324 для новой ближайшей точки сближения.
Система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 может непрерывно осуществлять мониторинг потока воздушных судов в воздушном пространстве 305, когда первое воздушное судно 302 находится на измененном пути 314 полета. В частности, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 может непрерывно устанавливать ближайшую точку сближения для первого воздушного судна, когда первое воздушное судно 302 и второе воздушное судно 304 движутся в воздушном пространстве 305. Кроме того, система предотвращения столкновений с центром в транспортном средстве может непрерывно прогнозировать, будет ли второе воздушное судно 304 присутствовать в части воздушного пространства 305 внутри периметра 316 разделения во время, прогнозируемое для ближайшей точки сближения.
Таким образом, первое воздушное судно 302 может продолжать генерировать предотвращающие команды для вынуждения первого воздушного судна 302 изменять его путь полета до тех пор, пока второе воздушное судно 304 более не прогнозируется быть внутри периметра 316 разделения для первого воздушного судна 302 во время, прогнозируемое для ближайшей точки сближения между первым воздушным судном 302 и вторым воздушным судном 304. Иными словами, первое воздушное судно 302 может возвращаться на путь 306 полета, когда система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 определяет, что вероятность нарушения периметра 316 разделения более не существует.
В других иллюстрирующих примерах множество периметров разделения может быть предварительно определено в системе предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302. Например, периметр 316 разделения может содержать несколько желаемых уровней разделения или слоев периметра разделения. Как дополнительно описано ниже, множество слоев периметра разделения может быть определено на основании временных параметров, векторов скоростей воздушных судов, скоростей движения воздушных судов, параметров расстояния, относительного вектора скорости, относительных скоростей движения и/или других подходящих параметров.
Теперь рассмотрим фигуру 4, на которой иллюстрация еще одной среды для регулирования воздушного движения показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере среда 400 для регулирования воздушного движения является еще одним примером одного воплощения среды 100 из фигуры 1.
Как показано на фиг.4, среда 400 содержит первое воздушное судно 402 и второе воздушное судно 404. Первое воздушное судно 402 и второе воздушное судно 404 оборудованы системой предотвращения столкновений с центром в транспортном средстве в показанном примере. Системы предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 и второго воздушного судна 404 могут работать способом, подобным способу, описанному для системы предотвращения столкновений с центром в транспортном средстве первого воздушного судна 302 из фигуры 3.
Как показано, первое воздушное судно 402 движется по пути 406 полета в воздушном пространстве 405, в то время как второе воздушное судно 404 движется по пути 408 полета в воздушном пространстве 405. Первое воздушное судно 402 в данный момент находится в позиции 407 вдоль пути 408 полета. Второе воздушное судно 404 в данный момент находится в позиции 409.
Система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 может быть выполнена с возможностью для прогнозирования ближайшей точки 410 сближения по отношению к первому воздушному судну 402. Аналогичным образом, система предотвращения столкновений с центром в транспортном средстве второго воздушного судна 404 может быть выполнена с возможностью прогнозирования ближайшей точки 412 сближения по отношению ко второму воздушному судну 404.
Ближайшая точка 410 сближения и ближайшая точка 412 сближения показывают наименьший вектор дальности, который прогнозируется возникнуть между первым воздушным судном 402 и вторым воздушным судном 404, если эти воздушные суда продолжают путь 406 полета и путь 408 полета, соответственно. В этом иллюстрирующем примере ближайшая точка 410 сближения и ближайшая точка 412 сближения прогнозируются возникнуть, когда первое воздушное судно 402 находится в прогнозируемой позиции 420 вдоль пути 406 полета, и когда второе воздушное судно 404 находится в прогнозируемой позиции 422 вдоль пути 408 полета.
Далее, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 может прогнозировать время до ближайшей точки 410 сближения для первого воздушного судна 402, в то время как система предотвращения столкновений с центром в транспортном средстве второго воздушного судна 404 может прогнозировать время до ближайшей точки 412 сближения для второго воздушного судна 404. Кроме того, выполнение прогнозирования ближайшей точки 410 сближения и ближайшей точки 412 сближения может включать установление текущего вектора дальности между первым воздушным судном 402 и вторым воздушным судном 404. Текущий вектор дальности включает расстояние между позицией 407 первого воздушного судна 402 и позицией 409 второго воздушного судна 404, а также направление позиции 409 для второго воздушного судна 404 по отношению к позиции 407 для первого воздушного судна 402.
Периметр 414 разделения для первого воздушного судна 402 может быть предварительно определен в системе предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402. Аналогично, периметр 416 разделения для второго воздушного судна 404 может быть предварительно определен в системе предотвращения столкновений с центром в транспортном средстве второго воздушного судна 404.
Соответственно, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 может генерировать предотвращающие команды, когда вектор дальности между первым воздушным судном 402 и вторым воздушным судном 404 в ближайшей точке 410 сближения находится внутри предварительно определенного периметра 414 разделения, или нарушает предварительно определенный периметр 414 разделения. Иными словами, предотвращающие команды могут генерироваться, когда прогнозируемая позиция 422 для второго воздушного судна 404 находится внутри периметра 414 разделения для первого воздушного судна 402, когда первое воздушное судно 402 находится в прогнозируемой позиции 420.
Соответствующим образом, система предотвращения столкновений с центром в транспортном средстве второго воздушного судна 404 может производить предотвращающие команды, когда вектор дальности между первым воздушным судном 402 и вторым воздушным судном 404 в ближайшей точке 412 сближения находится внутри предварительно определенного периметра 416 разделения, или нарушает предварительно определенный периметр 416 разделения. Иными словами, предотвращающие команды могут генерироваться, когда прогнозируемая позиция 420 для первого воздушного судна 402 находится внутри периметра 416 разделения для второго воздушного судна 404, когда второе воздушное судно 404 находится в прогнозируемой позиции 422.
Предотвращающие команды, генерируемые каждой из систем предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 и второго воздушного судна 404, могут вынуждать первое воздушное судно 402 и второе воздушное судно 404 изменять путь 406 полета и путь 408 полета, соответственно. Кроме того, предотвращающие команды могут также изменять скорость воздушных судов в некоторых иллюстрирующих примерах.
Например, как показано на фигуре 4, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 может генерировать одну или более предотвращающую команду, которая вынуждает первое воздушное судно 402 реактивно заменять путь 406 полета измененным путем 418 полета. Аналогично, система предотвращения столкновений с центром в транспортном средстве второго воздушного судна 404 может генерировать одну или более предотвращающую команду, которая вынуждает второе воздушное судно 404 заменять путь 408 полета измененным путем 419 полета.
Системы предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 и второго воздушного судна 404 могут прогнозировать новую ближайшую точку сближения для измененного пути 418 полета и измененного пути 419 полета. Новая ближайшая точка сближения может прогнозироваться возникнуть, когда первое воздушное судно 402 находится в прогнозируемой позиции 424, а второе воздушное судно 404 находится в прогнозируемой позиции 426. Как изображено на фигуре 4, прогнозируемая позиция 424 для первого воздушного судна 402 находится снаружи периметра 416 разделения для второго воздушного судна 404, а прогнозируемая позиция 426 для второго воздушного судна 404 находится снаружи периметра 414 разделения для первого воздушного судна 402 во время, прогнозируемое для новой ближайшей точки сближения.
Таким образом, системы предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 и второго воздушного судна 404 могут автоматически обеспечивать, что надлежащее разделение, как определено периметром 414 разделения и периметром 416 разделения, соответственно, поддерживается по существу все время. При этом первое воздушное судно 402 и/или второе воздушное судно 404 может возвращаться на путь 406 полета и/или путь 408 полета, соответственно, когда системы предотвращения столкновений с центром в транспортном средстве этих воздушных судов определяют, что вероятность нарушения периметра 414 разделения и/или периметра 416 разделения, соответственно, более не существует.
В других иллюстрирующих примерах множество слоев периметра разделения может быть определено в системе предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 и/или второго воздушного судна 404. Например, периметр 414 разделения и/или периметр 416 разделения может содержать множество слоев периметра разделения. Как дополнительно описано ниже, множество слоев периметра разделения может быть определено на основании временных параметров, векторов скорости воздушных судов, скоростей движения воздушных судов, параметров расстояния, относительных скоростей движения, относительного вектора скорости и/или других подходящих параметров. Один из временных параметров может представлять собой время до ближайшей точки сближения.
Соответственно, способность автоматически изменять пути полета для воздушного судна может уменьшать или устранять риск столкновений из-за человеческой ошибки, взаимного непонимания, связанного с современными системами предотвращения столкновений, и/или других факторов. Кроме того, система предотвращения столкновений с центром в транспортном средстве воздушного судна может уменьшать загруженность находящихся на земле операторов управления воздушным движением путем уменьшения их вовлеченности в снижение вероятности столкновений воздушных судов.
Иллюстрации фигуры 3 и фигуры 4 не имеют целью внести ограничения в способ, которым различные предпочтительные варианты реализации могут быть воплощены. Например, в некоторых иллюстрирующих примерах другое воздушное судно в дополнение к первому воздушному судну 302 и второму воздушному судну 304 может присутствовать в среде 300.
В качестве одного иллюстрирующего примера, система предотвращения столкновений с центром в транспортном средстве первого воздушного судна 402 может быть выполнена с возможностью выработки предотвращающих команд для замены пути 406 полета для первого воздушного судна 402 измененным путем полета, отличным от измененного пути 418 полета, когда более чем одно воздушное судно прогнозируется присутствовать внутри периметра 414 разделения для первого воздушного судна 402 во время, в которое прогнозируется, что возникнет ближайшая точка 410 сближения.
Теперь рассмотрим фигуру 5, на которой иллюстрация блок-схемы авиационной электронной системы, которая обеспечивает предотвращение столкновений, показана согласно предпочтительному варианту реализации. Авиационная электронная система 500 может быть воплощена в воздушном судне, таком как, например, первое воздушное судно 104 из фигуры 1, первое воздушное судно 302 из фигуры 3, первое воздушное судно 402 из фигуры 4 и/или второе воздушное судно 404 из фигуры 4. Системы предотвращения столкновений с центром в транспортном средстве, описанные для первого воздушного судна 302 из фигуры 3, а также первого воздушного судна 402 и второго воздушного судна 404 из фигуры 4, могут быть воплощены в авиационной электронной системе 500.
В этих иллюстрирующих примерах один или более компонент авиационной электронной системы 500 может быть воплощен в вычислительной системе 501. Вычислительная система 501 представляет собой пример одного воплощения вычислительной системы 108 из фигуры 1. Вычислительная система 501 имеет форму некоторого количества ЭВМ в этих примерах. Когда более чем одна ЭВМ имеется в вычислительной системе 501, эти ЭВМ могут находиться в коммуникации друг с другом.
Например, авиационная электронная система 500 может содержать навигационную систему 502, базу 504 данных путей полета, автопилот 506, пилотажный командный прибор 508, датчики 510 движения и ЭВМ 512 предотвращения столкновений. Навигационная система 502, автопилот 506, пилотажный командный прибор 508 и ЭВМ 512 предотвращения столкновений могут быть воплощены в одной или более ЭВМ в вычислительной системе 501. Далее, одно или более из следующего: навигационная система 502, автопилот 506 и пилотажный командный прибор 508 - может быть воплощено в системе 111 управления полетами из фигуры 1.
Навигационная система 502 может использоваться для предоставления географической позиции воздушного судна во время полета. Географическая позиция воздушного судна - это позиция воздушного судна, определенная с использованием системы географических координат. Навигационная система 502 может содержать инерциальную систему координат (IRS), курсовертикаль (AHRS), глобальную систему позиционирования (GPS) и другие подобные системы. Часть этих систем может быть воплощена в вычислительной системе 501, в то время как другая часть этих систем может содержать датчики и/или другие устройства, внешние по отношению к вычислительной системе 501.
В этих иллюстрирующих примерах навигационная система 502 может содержать базу 504 данных путей полета на борту воздушного судна. База 504 данных путей полета предоставляет информацию о пути полета для воздушного судна. Информация о пути полета содержит предварительно определенные пути полета для воздушного судна. В некоторых иллюстрирующих примерах информация о пути полета может содержать предварительно определенные курсы для воздушного судна. Курс для воздушного судна - это направление движения или маршрут для воздушного судна. Это направление движения может быть определено, например, как угол по отношению к истинному северу. Курс для воздушного судна может также называться маршрутом.
Автопилот 506 в целом выполнен с возможностью пилотирования воздушного судна без человеческого вмешательства. В различных воплощениях автопилот 506 может получать информацию о полете от навигационной системы 502. Эта информация о полете может содержать, например, позицию, маршрут, угловое положение, скорость и/или другие подходящие типы информации о полете для воздушного судна. Автопилот 506 может также получать информацию о пути полета от базы 504 данных путей полета.
Путем сравнения информации о полете с информацией о пути полета автопилот 506 может выдавать управляющие команды для поддержания воздушного судна на конкретном пути полета. Например, автопилот 506 может вычислять установки режима работы двигателя и выдавать команды для поверхностей управления полетом.
Пилотажный командный прибор 508 в целом выполнен с возможностью вычисления и отображения желаемого пути полета для воздушного судна для по меньшей мере одного пилота во время конкретного полета. Например, когда пилот следует предварительно определенному курсу для воздушного судна, пилотажный командный прибор 508 может взаимодействовать с базой 504 данных путей полета и автопилотом 506 для вычисления и отображения необходимых полетных маневров для движения вдоль предварительно определенного курса для пилота.
В этих иллюстрирующих примерах пилотажный командный прибор 508 может содержать индикатор пилотажного командного прибора (FDI), индикатор горизонтального положения (HSI), селектор режима и ЭВМ пилотажного командного прибора. Кроме того, индикатор пилотажного командного прибора может содержать дисплей, который может предоставлять индикатор углового положения, фиксированный символ воздушного судна, командные стрелки тангажа и крена, индикатор угла глиссады, индикатор отклонения от курса по радиомаяку и/или другие типы индикаторов.
Пилотажный командный прибор 508 может снабжать пилота управляющими командами, необходимыми для получения и удержания желаемого курса или пути полета. В некоторых иллюстрирующих примерах пилотажный командный прибор 508 может также предоставлять управляющие команды автопилоту 506, которые автопилот 506 может транслировать в команды для поверхностей управления полетом воздушного судна.
Датчики 510 движения могут быть выполнены с возможностью получения позиций движущихся воздушных судов. Движущиеся воздушные суда могут содержать любое количество других воздушных судов, которые могут двигаться в воздушном пространстве, в котором движется рассматриваемое воздушное судно. Согласно различным вариантам реализации, датчики 510 движения могут быть выполнены с возможностью приема данных о движении от системы оповещения о движении и предотвращения столкновений, системы автоматического зависимого наблюдения, находящейся на земле системы управления воздушным движением, бортовой радарной системы наблюдения за движением и/или других систем наблюдения за воздушным движением.
Как показано в этом примере, ЭВМ 512 предотвращения столкновений имеет обрабатывающие средства и память, подходящие для хранения и исполнения исполняемых ЭВМ инструкций. В одном варианте реализации ЭВМ 512 предотвращения столкновений содержит один или более процессор 514 и память 516.
Запоминающее устройство 516 может содержать энергозависимую и энергонезависимую память, съемный носитель и несъемный носитель, воплощенные в любом способе или любой технологии для хранения информации, такой как читаемые ЭВМ инструкции, структуры данных, программные модули или другие данные. Такая память содержит, но не ограничена этим, оперативное запоминающее устройство (RAM), постоянное запоминающее устройство (ROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM), флэш-память или другую технологию памяти; постоянное запоминающее устройство на компакт-диске (CD-ROM), цифровой универсальный диск (DVD) или другое оптическое запоминающее устройство; магнитные кассеты, магнитную ленту, запоминающее устройство на магнитных дисках или другие магнитные запоминающие устройства; запоминающие системы на избыточном массиве из независимых дисков или любой другой носитель, который может быть использован для хранения желаемой информации, и к которому доступ может быть осуществлен вычислительной системой.
Память 516 содержит модули, которые позволяют ЭВМ 512 предотвращения столкновений выполнять различные функции. Эти модули могут содержать модуль 518 интерфейса автопилота, модуль 520 интерфейса базы данных, модуль 522 интерфейса пилотажного командного прибора, модуль 524 предотвращения столкновений, модуль 526 интеграции команд, модуль 528 интерфейса датчиков движения и базу 530 данных.
Модуль 524 предотвращения столкновений и набор других модулей в памяти 516 могут использоваться для воплощения модуля 112 из фигуры 1. Кроме того, модуль 518 интерфейса автопилота, модуль 520 интерфейса базы данных, модуль 522 интерфейса пилотажного командного прибора, модуль 524 предотвращения столкновений, модуль 526 интеграции команд, модуль 528 интерфейса датчиков движения и база 530 данных могут быть воплощены в качестве программного обеспечения и/или исполняемых ЭВМ инструкций, которые исполняются одним или более процессором 514 с целью выполнения функций, как описано ниже.
Модуль 518 интерфейса автопилота выполнен с возможностью обеспечения возможности для ЭВМ 512 предотвращения столкновений осуществлять коммуникацию с автопилотом 506. Коммуникация может быть установлена по электрическому соединению, оптическому соединению и т.п.В этих иллюстрирующих примерах модуль 518 интерфейса автопилота может быть выполнен с возможностью обеспечения возможности для автопилота 506 выполнять предотвращение столкновений под руководством ЭВМ 512 предотвращения столкновений.
Модуль 520 интерфейса базы данных обеспечивает возможность считывания данных из базы 530 данных и записи данных в базу 530 данных. В этих иллюстрирующих примерах модуль 520 интерфейса базы данных может быть активирован другими модулями в памяти 516, как дополнительно описано ниже. База 530 данных может быть выполнена с возможностью хранения информации, которая может быть использована для поддержания воздушного судна на различных путях полета, а также для предотвращения столкновений.
Например, база 530 данных может содержать правила контроля траектории и скорости. Правила контроля траектории и скорости могут обуславливать рабочие качества и маневренные качества воздушного судна. Кроме того, база 530 данных может также хранить предельные значения для разделения воздушных судов и предельные значения реакции воздушного судна.
Предельные значения для разделения воздушных судов могут использоваться для определения периметра разделения, такого как периметр 316 разделения, описанный на фигуре 3. Эти хранящиеся предельные значения могут использоваться для определения размеров и формы периметра разделения. Например, периметры могут иметь размеры, такие как диаметр, ширина, длина и высота и/или другие размеры для определения периметра разделения. Предельные значения реакции воздушного судна, как дополнительно описано ниже, могут обуславливать максимальное желаемое сближение между рассматриваемым воздушным судном и другим воздушным судном и минимальное время, при котором воздушное судно должно изменить его путь полета для снижения вероятности столкновения.
Разумеется, другая информация может также быть использована в определении формы периметра разделения. Эти факторы могут включать, например, без ограничения, погодные условия, высоту над уровнем моря, условия видимости, ветровые условия, ландшафт, над которым воздушное судно летит, количество пассажиров в воздушном судне и/или другие подходящие факторы.
Модуль 522 интерфейса пилотажного командного прибора может обеспечивать коммуникацию между пилотажным командным прибором 508 и модулем 524 предотвращения столкновений. Соответственно, модуль 522 интерфейса пилотажного командного прибора может обеспечивать возможность для пилотажного командного прибора 508 снабжать пилота необходимыми управляющими командами.
Модуль 528 интерфейса датчиков движения может быть выполнен с возможностью предоставления данных датчиков движения от датчиков 510 движения в ЭВМ 512 предотвращения столкновений. Модуль 524 предотвращения столкновений в ЭВМ 512 предотвращения столкновений может анализировать данные датчиков движения, принимаемые от модуля 528 интерфейса датчиков движения. Модуль 524 предотвращения столкновений может изменять текущий путь полета воздушного судна, если воздушное судно не может поддерживать желаемый уровень разделения между этим воздушным судном и другим воздушным судном вдоль текущего пути полета.
Модуль 526 интеграции команд может быть выполнен с возможностью использования модуля 518 интерфейса автопилота и модуля 522 интерфейса пилотажного командного прибора для, соответственно, отправки предотвращающих команд, изменений пути полета и/или информации о новом пути полета автопилоту 506 и пилотажному командному прибору 508.
Теперь рассмотрим фигуру 6, на которой иллюстрация блок-схемы системы предотвращения столкновений показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере система 600 представляет собой систему предотвращения столкновений. В частности, система 600 может использоваться для воплощения системы предотвращения столкновений с центром в транспортном средстве в воздушном судне, таком как, например, первое воздушное судно 104 из фигуры 1, первое воздушное судно 302 из фигуры 3, первое воздушное судно 402 из фигуры 4 и/или второе воздушное судно 404 из фигуры 4.
Как показано, система 600 может содержать модуль 602 управления полетами и модуль 604 предотвращения столкновений. Модуль 602 управления полетами в целом выполнен с возможностью поддержания воздушного судна на предварительно определенных путях полета, когда воздушное судно движется между различными пунктами. Модуль 604 предотвращения столкновений выполнен с возможностью выработки предотвращающих команд, которые могут обеспечивать предотвращение столкновений. Модуль 604 предотвращения столкновений и модуль 602 управления полетами могут быть воплощены с использованием программного обеспечения, аппаратного обеспечения или их комбинации.
В этом иллюстрирующем примере модуль 602 управления полетами может содержать функцию 606 выработки траектории, функцию 608 управляющих команд и функцию 610 модификации команд. Эти функции могут выполняться одним или более из следующего: навигационная система 502, автопилот 506 и пилотажный командный прибор 508 в авиационной электронной системе 500 из фигуры 5.
Функция 606 выработки траектории выполнена с возможностью выработки траекторий полета для воздушного судна на основании предварительно определенных промежуточных пунктов для воздушного судна. В этих иллюстрирующих примерах траектория полета для воздушного судна - это некоторое количество промежуточных пунктов, установленных для прохождения воздушным судном во время полета, так что воздушное судно поддерживает желаемый путь полета. Промежуточные пункты - это позиции в воздушном пространстве. Эти позиции могут представлять собой позиции, определенные с использованием, например, системы географических координат.
В этих иллюстрирующих примерах указанное некоторое количество промежуточных пунктов, установленных траекторией полета, содержит будущие промежуточные пункты, которые должны быть пройдены, и может не содержать промежуточные пункты, которые уже были пройдены воздушным судном во время полета. В некоторых случаях траектория полета может содержать некоторое количество промежуточных пунктов, прогнозируемых быть пройденными воздушным судном, когда воздушное судно поддерживает желаемый путь полета.
В некоторых иллюстрирующих примерах траектория полета может также показывать путь между каждой парой промежуточных пунктов в некотором количестве промежуточных пунктов, который должен быть пройден воздушным судном. Таким образом, траектория полета может содержать желаемый путь полета, а также установление некоторого количества промежуточных пунктов, которые должны быть пройдены вдоль желаемого пути полета.
Траектория полета может также содержать время, в которое некоторое количество промежуточных пунктов должно быть пройдено воздушным судном. Когда траектория полета содержит информацию о времени, траектория полета может быть названа четырехмерной траекторией полета. Когда траектория полета не содержит информацию о времени, траектория полета может быть названа трехмерной траекторией полета.
Функция 608 управляющих команд выполнена с возможностью сравнения генерируемой траектории полета с текущей позицией и текущим вектором скорости воздушного судна. Функция 608 управляющих команд определяет, отклонено ли и/или отклонится ли воздушное судно от генерируемой траектории полета, и нужны ли коррекции пути полета. Коррекции пути полета - это изменения текущего пути полета и/или маршрута, которому воздушное судно следует.
Когда коррекции пути полета необходимы, функция 608 управляющих команд может производить управляющие команды, которые воплощают коррекции пути пролета согласно правилам контроля траектории и скорости. Управляющие команды могут быть сформированы для изменения установок режима работы двигателя для движительной системы воздушного судна и/или манипулирования работой поверхностей управления полетом воздушного судна.
В некоторых иллюстрирующих примерах управляющие команды, производимые функцией 608 управляющих команд, могут также обрабатываться функцией 610 модификации команд, прежде чем они воплощаются в движительной системе и на соответствующих поверхностях управления полетом. В частности, функция 610 модификации команд может быть выполнена с возможностью воплощения управляющих команд как функции условий полета с использованием коэффициентов усиления, также называемых весовыми коэффициентами и/или предельных значений.
Например, функция 610 модификации команд может определить высокое значение весового коэффициента для одной или более управляющей команды, когда воздушное судно значительно отклонилось от пути полета. Высокое значение весового коэффициента может вынудить одну или более управляющую команду быть надлежащим образом воплощенной в высокой степени, с тем чтобы вынудить воздушное судно быстро вернуться на назначенный путь полета.
И, наоборот, функция 610 модификации команд может определить низкое значение весового коэффициента для одной или более управляющей команды, когда воздушное судно испытывает лишь незначительное отклонение от пути полета. В этом случае управляющие команды могут поэтапно воплощаться так, что возвращение воздушного судна на назначенный путь полета является более постепенным или плавным. Кроме того, управляющие команды могут воплощаться таким способом, который учитывает удобство пассажиров, ходовые качества, факторы безопасности и/или другие подходящие факторы.
В этих иллюстрирующих примерах модуль 604 предотвращения столкновений может взаимодействовать с модулем 602 управления полетами для изменения пути полета воздушного судна во время полета для обеспечения предотвращения столкновения, когда необходимо. Модуль 524 предотвращения столкновений в ЭВМ 512 предотвращения столкновений из фигуры 5 может быть использован для воплощения функций, выполняемых в модуле 604 предотвращения столкновений.
Как показано, модуль 604 предотвращения столкновений системы 600 может выдавать предотвращающие команды, которые конкурируют с управляющими командами, выдаваемыми модулем 602 управления полетами. Таким образом, предотвращающие команды могут изменять траекторию полета и/или путь полета воздушного судна для обеспечения предотвращения столкновений. В этих иллюстрирующих примерах модуль 604 предотвращения столкновений содержит функцию 612 анализа траектории, функцию 616 вычислений, предельные значения 618 разделения, предельные значения 620 реакции и функцию 622 модификации предотвращения.
Функция 612 анализа траектории может быть выполнена с возможностью прогнозирования пути полета воздушного судна по отношению к путям полета других движущихся воздушных судов. Функция 612 анализа траектории может получать информацию 614 о движении от датчика 510 движения через модуль 528 интерфейса датчиков движения из фигуры 5. Сведения 614 о движении могут содержать позицию, вектор скорости, маршрут, величину изменения маршрута, скорости набора высоты, скорости снижения, скорость изменения вектора скорости и траекторию движущихся воздушных судов.
В других случаях сведения 614 о движении могут также содержать планы полетов конкретных воздушных судов. План полета содержит предварительно определенную траекторию полета для конкретного воздушного судна. Иными словами, план полета может содержать предварительно определенный путь полета для конкретного воздушного судна и время, относящееся к различным промежуточным пунктам вдоль предварительно определенного пути полета.
Например, если движущееся воздушное судно заявило план полета, функция 612 анализа траектории может получить этот план полета от наземного источника, такого как, например, база данных планов полета в находящейся на земле станции управления. План полета, который получен, может снабжать функцию 612 анализа траектории подробными сведениями, относящимися к позициям, в которых движущееся воздушное судно будет в конкретные моменты времени.
Однако в других иллюстрирующих примерах система управления полетом движущегося воздушного судна может быть способна передавать данные о позиции и скорости другим воздушным судам. В этих примерах функция 612 анализа траектории может также получать сведения 614 о движении непосредственно от движущихся воздушных судов.
Кроме того, функция 612 анализа траектории может получать прогнозируемый путь полета воздушного судна, в котором система 600 воплощена, от функции 606 выработки траектории. Воздушное судно, на котором система 600 воплощена, также может быть названо самостоятельным воздушным судном в этих иллюстрирующих примерах.
Когда функция 612 анализа траектории получила данные о траектории от различных источников, функция 612 анализа траектории может обрабатывать эти данные для определения желаемой информации о траектории. Эта желаемая информация о траектории может содержать позицию самостоятельного воздушного судна; скорости самостоятельного воздушного судна; запланированную траекторию самостоятельного воздушного судна; позицию каждого движущегося воздушного судна; скорости каждого движущегося воздушного судна и запланированную траекторию каждого движущегося воздушного судна. В настоящем документе скорости для самостоятельного воздушного судна и каждого движущегося воздушного судна могут содержать скорости изменения маршрута, скорости набора высоты, скорости снижения, вектор скорости и скорости изменения вектора скорости. Скорости изменения вектора скорости также называются ускорением.
Таким образом, функция 612 анализа траектории может прогнозировать ожидаемый путь полета каждого воздушного судна, для которого она была снабжена данными. Функция 612 анализа траектории может быть выполнена с возможностью отправки прогнозируемых траекторий функции 616 вычислений.
Функция 616 вычислений может быть выполнена с возможностью обработки прогнозируемых траекторий разных воздушных судов и выдачи предотвращающих команд самостоятельному воздушному судну, когда нарушение разделения было установлено. В частности, прогнозируемые траектории разных воздушных судов могут использоваться для прогнозирования того, «нарушит» ли какое-либо из движущихся воздушных судов предварительно определенный периметр разделения для самостоятельного воздушного судна в ближайшей точке сближения между самостоятельным воздушным судном и каждым из движущихся воздушных судов.
Например, если по меньшей мере одно из движущихся воздушных судов прогнозируется быть внутри периметра разделения в ближайшей точке сближения между движущимся воздушным судном и самостоятельным воздушным судном, то периметр разделения прогнозируется быть «нарушенным». Когда функция 616 вычислений достигает такого прогноза, функция 616 вычислений может быть сформирована для выдачи предотвращающих команд.
Эти предотвращающие команды могут приоритетно изменять путь полета самостоятельного воздушного судна так, что периметр разделения не «нарушается» в прогнозируемой ближайшей точке сближения. Таким образом, функция 616 вычислений генерирует предотвращающие команды, необходимые для обеспечения желаемого уровня разделения между воздушным судном и другими воздушными судами. Кроме того, модуль предотвращения столкновений, подобный модулю 604 предотвращения столкновений, может иметься на каждом движущемся воздушном судне и может выдавать предотвращающие команды каждому движущемуся воздушному судну, когда необходимо.
В этих показанных примерах функция 616 вычислений использует предельные значения 618 разделения для определения размеров периметра разделения для воздушного судна. В одном иллюстрирующем примере предельные значения 618 разделения могут определять минимальное расстояние разделения, которое проходит во всех направлениях. Таким образом, периметр разделения может быть в форме сферы. Например, периметр разделения может быть установлен на основании расстояния разделения в одну милю во всех направлениях. Иными словами, движущееся воздушное судно считается «нарушившим» периметр разделения для самостоятельного воздушного судна, если движущееся воздушное судно прогнозируется быть ближе, чем на одну милю, от воздушного судна в ближайшей точке сближения, прогнозируемой между самостоятельным воздушным судном и движущимся воздушным судном.
В других иллюстрирующих примерах предельные значения 618 разделения могут быть сформированы для обеспечения других форм периметра разделения. Например, предельные значения 618 разделения могут определять радиус, который проходит во всех продольных и поперечных направлениях, и фиксированное расстояние по вертикальной оси для всех точек, которые отходят от продольного и поперечного направлений. В этом случае предельные значения 618 разделения могут определять цилиндрическое пространство.
Разумеется, в других иллюстрирующих примерах предельные значения 618 разделения могут быть сформированы для определения разнообразия других трехмерных форм, таких как, например, эллипсоид, сфероид, полусфера, куб, октаэдр и/или некоторые другие подходящие трехмерные формы. Иными словами, трехмерные формы могут не быть симметричными.
В некоторых случаях неопределенность в прогнозировании ближайшей точки сближения может быть зависящей от направления. Иными словами, неопределенность может быть разной в разных направлениях по отношению к воздушному судну. В результате формы, определяемые предельными значениями 618 разделения, могут быть несимметричными, когда неопределенность в прогнозировании ближайшей точки сближения является разной в разных направлениях по отношению к воздушному судну.
Кроме того, предельные значения 618 разделения могут определять разные трехмерные формы для периметра разделения для воздушного судна на основании разных типов воздушного судна. Например, когда самостоятельное воздушное судно является конкретным типом воздушного судна, периметр разделения, определяемый для самостоятельного воздушного судна и движущегося воздушного судна первого типа может быть отличным от периметра разделения, определяемого для самостоятельного воздушного судна и движущегося воздушного судна второго типа.
В качестве одного иллюстрирующего примера, трехмерная форма периметра разделения, определяемая предельными значениями 618 разделения, может быть основана на классе самостоятельного воздушного судна и/или классе движущегося воздушного судна. Класс воздушного судна может представлять собой, например, тяжелое воздушное судно коммерческой авиации, легкое находящееся в частном владении воздушное судно, реактивное воздушное судно, вертолет и/или некоторый другой подходящий класс воздушного судна. Трехмерные формы для периметра разделения также могут определяться на основании маневренности самостоятельного воздушного судна и/или движущегося воздушного судна, а также скорости самостоятельного воздушного судна и/или движущегося воздушного судна.
Функция 616 вычислений может быть также сформирована для использования предельных значений 620 реакции для выработки предотвращающих команд. Предельные значения 620 реакции могут определять быстроту, с которой предотвращающие команды выполняются.
Например, предельные значения 620 реакции могут быть установлены таким образом, что, когда прогнозируемая ближайшая точка сближения между самостоятельным воздушным судном и движущимся воздушным судном прогнозируется возникнуть на расстоянии от текущей позиции самостоятельного воздушного судна, которое по существу равно некоторому выбранному пороговому значению или больше, чем некоторое выбранное пороговое значение, функция 616 вычислений может отложить выдачу одной или более предотвращающей команды. И, наоборот, если прогнозируемая ближайшая точка сближения между самостоятельным воздушным судном и движущимся воздушным судном прогнозируется возникнуть на расстоянии от текущей позиции самостоятельного воздушного судна, которое меньше, чем выбранное пороговое значение, функция 616 вычислений может немедленно выдать одну или более предотвращающую команду для исполнения самостоятельным воздушным судном.
В некоторых иллюстрирующих примерах функция 616 вычислений может быть сформирована для вычисления времени до ближайшей точки сближений (tcpa). Это время может также называться оставшимся временем до ближайшей точки сближения. В этих примерах предельные значения 620 реакции могут также содержать временные предельные значения. Например, если время до ближайшей точки сближения прогнозируется возникнуть во время в будущем, которое по существу равно некоторому выбранному пороговому значению или позже некоторого выбранного порогового значения, функция 616 вычислений может отложить исполнение предотвращающей команды.
Например, время до ближайшей точки сближения может быть позже, чем выбранное пороговое значение, за счет нахождения за пределами предварительно определенного временного интервала. Этот предварительно определенный временной интервал может быть в любых единицах временного инкремента, таких как, например, секунды, минуты, часы и/или некоторые другие инкременты для времени.
Наоборот, время до ближайшей точки сближения близко во времени. Например, когда время до возникновения ближайшей точки сближения прогнозируется во время, более раннее, чем некоторое выбранное пороговое значение, например, раньше, чем некоторый предварительно определенный временной интервал истечет, функция 616 вычислений может более быстро выдавать предотвращающие команды для исполнения. Кроме того, если время до ближайшей точки сближения является отрицательным, то ближайшая точка сближения уже возникла, и воздушные суда движутся друг от друга. В этом случае предотвращающая команда может быть установлена на ноль.
Таким образом, функция 616 вычислений может определять приоритеты выработки предотвращающих команд на основании близости потенциального столкновения с каждым из множества движущихся воздушных судов. Например, вычисление времени до ближайшей точки сближения и воплощение временных предельных значений в предельных значениях 620 реакции могут быть подходящими для предотвращения столкновений между воздушными судами с большим оставшимся временем до ближайшей точки сближения. Большее оставшееся время до ближайшей точки сближения может прогнозироваться между двумя воздушными судами, которые летят на малом расстоянии вдоль параллельных путей, следуют друг за другом или движутся на траекториях на большом расстоянии друг от друга с почти нулевым расстоянием в ближайшей точке сближения.
В этих иллюстрирующих примерах функция 622 модификации предотвращения может быть сформирована для определения коэффициента усиления, или весовых коэффициентов предотвращения, для одной или более предотвращающей команды, генерируемой функцией 616 вычислений. Весовые коэффициенты предотвращения могут использоваться для установления относительной мощности предотвращающих команд и управляющих команд.
Например, функция 622 модификации предотвращения может содержать низкий коэффициент усиления для дальнего первого слоя периметра разделения и высокий коэффициент усиления для близкого второго слоя периметра разделения. В этом примере первый слой периметра разделения может обеспечивать разделение с использованием незначительных коррекций пути на большом расстоянии. Кроме того, в этом примере второй слой периметра разделения может обеспечивать способность предотвращающих команд преодолевать нормальные управляющие команды, выдаваемые функцией 608 управляющих команд в модуле 602 управления полетами, на близком расстоянии с использованием более высоких коэффициентов усиления.
В результате функция 616 вычислений и функция 622 модификации предотвращения могут увеличивать тенденцию самостоятельного воздушного судна изменять его путь полета по мере того, как оно сближается с движущимся воздушным судном. Кроме того, необходимо понимать, что функция 622 модификации предотвращения может быть выполнена с возможностью определения различных коэффициентов усиления для предотвращающих команд для каждого периметра разделения и каждого движущегося воздушного судна.
В других иллюстрирующих примерах функция 622 модификации предотвращения может быть также выполнена с возможностью определения коэффициентов усиления, которые выборочно воплощают часть предотвращающих команд. Например, функция 622 модификации предотвращения может быть выполнена с возможностью определения нулевого весового коэффициента для компонента предотвращающей команды, который вынуждает воздушное судно снижаться, когда воздушное судно находится ниже предварительно определенной минимальной высоты над уровнем моря. Это может защитить воздушное судно от выполнения нежелательных изменений пути. В некоторых иллюстрирующих примерах функция 622 модификации предотвращения может быть выполнена с возможностью определения по существу нулевого весового коэффициента для компонентов предотвращающей команды, которые поворачивают воздушное судно в конкретном направлении, таком как, например, правое или левое.
Функция 622 модификации предотвращения может быть также выполнена с возможностью сдерживания предотвращающих команд предельными значениями управления. Например, функция 622 модификации предотвращения может обеспечивать предельные значения управления, которые не позволяют предотвращающим командам воплощаться, когда отклонения от пути полета являются незначительными. В других примерах как функция 610 модификации команд, так и функция 622 модификации предотвращения могут использовать предельные значения управления для предотвращения радикальных движений воздушного судна или перенасыщения командами системы управления полетами в воздушном судне.
Когда функция 622 модификации предотвращения определила необходимые коэффициенты усиления и/или предельные значения для предотвращающих команд, предотвращающие команды поступают в, например, модуль 526 интеграции команд из фигуры 5. Модуль 526 интеграции команд может воплощать функции, осуществляемые компонентом 623 интеграции и модулем 624 интеграции команд.
В частности, компонент 623 интеграции прикладывает предотвращающие команды к управляющим командам и отправляет эти интегрированные команды модулю 624 интеграции команд. Как описано выше, управляющие команды производятся функцией 608 управляющих команд и модифицируются функцией 610 модификации команд.
Предотвращающие команды, которые генерируются, могут содержать, например, команды скорости изменения маршрута, команды модификации скорости набора высоты или снижения, команды ускорения и замедления и/или другие управляющие команды, такие как команды изменения скорости, высоты над уровнем моря и маршрута. Иными словами, предотвращающие команды могут быть сформированы для влияния на вычисления установок тяги и поверхностей управления полетом в модуле 624 интеграции команд.
В различных вариантах реализации модуль 624 интеграции команд может воплощать предотвращающие команды таким образом, что они конкурируют с управляющими командами, выдаваемыми функцией 608 управляющих команд, для которых функцией 610 модификации команд определены весовые коэффициенты и предельные значения. Таким образом, модуль 604 предотвращения столкновений может изменять путь полета воздушного судна, когда модуль 604 предотвращения столкновений прогнозирует, что «нарушение» периметра разделения ожидается.
Кроме того, модуль 624 интеграции команд может также подавать показания позиции и скорости обратно функции 608 управляющих команд и функции 612 анализа траектории. Кроме того, показания позиции и вектора скорости могут передаваться обратно автопилоту 506, пилотажному командному прибору 508 и/или некоторым другим системам в авиационной электронной системе 500. В свою очередь, функция 608 управляющих команд может использовать передаваемые по обратной связи показания позиции и вектора скорости для выработки дальнейших управляющих команд в том же процессе, что описан выше. Аналогично, функция 612 анализа траектории может использовать передаваемые по обратной связи показания позиции и вектора скорости для непрерывного обновления ее прогнозов траектории полета.
Необходимо понимать, что модуль 604 предотвращения столкновений может быть выполнен с возможностью непрерывного мониторинга траекторий самостоятельных воздушных судов и движущихся воздушных судов и прогнозирования будущих «нарушений» периметра разделения ближайшей точкой сближения между воздушным судном и другими воздушными судами. Этот непрерывный мониторинг может гарантировать, что путь полета воздушного судна изменяется каждый раз, когда нарушение разделения прогнозируется.
Однако модуль 604 предотвращения столкновений может прекращать выдачу предотвращающих команд, когда траектории воздушного судна и движущихся воздушных судов показывают, что периметр разделения более не нарушается ближайшей точкой сближения. Таким образом, малые изменения пути полета могут непрерывно выполняться для снижения потенциальных рисков столкновений. В некоторых иллюстрирующих примерах модуль 604 предотвращения столкновений может генерировать предотвращающие команды, даже когда пилот управляет воздушным судном.
Теперь рассмотрим фигуру 7, на которой иллюстрация уравнений для прогнозирования ближайшей точки сближения между двумя воздушными судами показана согласно предпочтительному варианту реализации. В частности, примеры уравнений для прогнозирования ближайшей точки сближения между первым воздушным судном 702 и вторым воздушным судном 704 показаны. Эти уравнения представляют собой пример одного воплощения для прогнозирования ближайшей точки 121 сближения между первым воздушным судном 104 и вторым воздушным судном 105 из фигуры 1. Кроме того, фигура 7 также иллюстрирует выработку предотвращающих команд.
Как показано на фигуре 7, принимая, что первое воздушное судно 702 и второе воздушное судно 704 продолжают движение вдоль прямых путей с постоянными скоростями, ближайшая точка сближения между первым воздушным судном 702 и вторым воздушным судном 704 может быть представлена уравнением:

где 



Далее, время до ближайшей точки сближения может быть представлено уравнением:

где tcpa - это время до ближайшей точки сближения, а 


Управляющее правило управления предотвращением для выработки предотвращающей столкновение команды с центром в транспортном средстве, 

где

и где р представляет количество слоев периметра разделения, n представляет количество движущихся воздушных судов, используемые для выработки предотвращающей команды.
Кроме того, Kp,n может представлять собой коэффициенты усиления
управляющей системы, применяемые к каждому соответствующему управляющему направлению 

Согласно различным вариантам реализации, С может быть выбран следующим образом:

где dp - это желаемое расстояние разделения для каждого оцениваемого слоя периметра разделения, и которое может быть измерено вдоль вектора 
Если коэффициенты усиления управляющей системы равны в каждом управляющем направлении и аналогичны для каждого движущегося воздушного судна, то единый коэффициент усиления предотвращения столкновений может быть определен следующим образом:
Таким образом, в этом примере предотвращающая команда может быть упрощена
до:

Кроме того, в качестве примера, если имеется лишь одно движущееся воздушное судно, подвергаемое оценке, т.е. n=1, и лишь один слой периметра разделения, р=1, то
предотвращающая команда, Fcontrol | может быть упрощена до:

где kavoidance содержит коэффициент усиления или весовой коэффициент управляющей системы, d1 - это желаемое расстояние разделения, которое может составлять слой периметра разделения, a  - это норма вектора
- это норма вектора 
 - это расстояние до ближайшей точки сближения.
- это расстояние до ближайшей точки сближения.
Как показано, предотвращающая команда,


Иными словами, в этих иллюстрирующих примерах функция 616 вычислений из фигуры 6 может увеличивать величину предотвращающей команды по мере того, как уменьшается расстояние до ближайшей точки сближения. Например, функция 616 вычислений может предоставлять предотвращающую команду в форме команды ускорения, которая увеличивает тягу воздушного судна.
Функции 
Согласно некоторым вариантам реализации, примеры уравнений, иллюстрируемые выше, могут быть воплощены для установления нескольких слоев периметра разделения. Каждый слой периметра разделения может поддерживаться на основании уникального набора величин, коэффициентов усиления, функций и предельных значений разделения. Кроме того, слои периметра разделения могут быть установлены на основании времени, расстояния, скорости и любого их сочетания.
Например, основанный на времени слой периметра разделения может быть установлен, когда время до ближайшей точки сближения меньше, чем заданное предельное значение разделения. Основанный на скорости и расстоянии слой периметра разделения также может быть установлен, например, когда инициация предотвращающей команды основана как на величине относительной скорости, так и на расстоянии между самостоятельным воздушным судном любым движущимся воздушным судном. Кроме того, желаемое расстояние разделения периметра разделения может содержать набор расстояний и координатных направлений
Теперь рассмотрим фигуру 8, на которой иллюстрация системы предотвращения столкновений с центром в транспортном средстве показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере система 800 предотвращения столкновений с центром в транспортном средстве может содержать систему управления полетами. Система управления полетами может быть выполнена с возможностью поддержания воздушного судна на предварительно определенных траекториях полета, когда воздушное судно движется между различными пунктами.
В частности, компоненты системы управления полетами могут содержать функцию 802 выработки траектории и функцию 804 реакции транспортного средства. Система 800 предотвращения столкновений с центром в транспортном средстве может также содержать модуль 806 предотвращения столкновений. Модуль 806 предотвращения столкновений может быть выполнен с возможностью модификации траекторий полета, выдаваемых функцией 802 выработки траектории, для обеспечения предотвращения столкновений. Согласно различным воплощениям, функция 802 выработки траектории и/или функция 804 реакции транспортного средства могут выполняться одним или более из следующего: навигационная система 502, автопилот 506 и пилотажный командный прибор 508, описанные выше со ссылкой на фигуру 5.
Функция 802 выработки траектории выполнена с возможностью создания прогнозируемых траекторий полета для воздушного судна. В частности, эти траектории полета могут представлять собой четырехмерные траектории. Функция 802 выработки траектории использует сведения 808 о движении для прогнозирования траекторий полета. Функция 804 реакции транспортного средства может быть выполнена с возможностью сравнения генерируемой траектории полета с текущей позицией и вектором скорости воздушного судна для определения любого отклонения и того, нужны ли какие-либо коррекции пути полета.
Функция 804 реакции транспортного средства может производить управляющие команды, которые воплощают генерируемые траектории полета для воздушного судна, согласно правилам контроля траектории и скорости, другим правилам контроля, динамике транспортного средства и/или другим подходящим параметрам. Генерируемые управляющие команды могут быть сформированы для изменения установок режима работы двигателя для воздушного судна и/или манипулирования поверхностями управления полетом воздушного судна для полета воздушного судна вдоль траектории 810.
Модуль 806 предотвращения столкновений может модифицировать генерируемую траекторию полета для воздушного судна, производимую функцией 802 выработки траектории, раньше, чем траектория полета воплощается управляющими командами, генерируемыми функцией 804 реакции транспортного средства для полета воздушного судна вдоль траектории 810. В этих иллюстрирующих примерах функции, выполняемые модулем 806 предотвращения столкновений, могут выполняться модулем 524 предотвращения столкновений, описанным на фигуре 5.
Теперь рассмотрим фигуру 9, на которой иллюстрация модуля предотвращения столкновений показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере различные функции, выполняемые модулем 806 предотвращения столкновений из фигуры 8, описаны более подробно.
Как показано, модуль 806 предотвращения столкновений содержит функцию 902 анализа траектории. Функция 902 анализа траектории может быть выполнена с возможностью прогнозирования траектории полета воздушного судна по отношению к траекториям полета других воздушных судов. Функция 902 анализа траектории может получать сведения 816 о движении от датчиков 510 движения через модуль 528 интерфейса датчиков движения из фигуры 5.
Сведения 816 о движении могут содержать позицию, вектор скорости, маршрут и траекторию движущихся воздушных судов. В других случаях сведения 816 о движении могут также содержать планы или намерения полетов конкретных движущихся воздушных судов. Например, если движущееся воздушное судно заявило план полета или обновило намерение, функция 902 анализа траектории может получить план полета из центрального источника, такого как база данных планов полета, или из системы регулирования полета движущегося воздушного судна с использованием канала передачи данных. План полета может снабжать функцию 902 анализа траектории подробными сведениями, относящимися к позициям движущихся воздушных судов в конкретные моменты времени.
Кроме того, функция 902 анализа траектории может получать прогнозируемую траекторию воздушного судна от функции 802 выработки траектории. Кроме того, функция 902 анализа траектории может также получать данные 904 о позиции и векторе скорости для воздушного судна от одного из следующего: автопилот 506 и/или пилотажный командный прибор 508 из фигуры 5.
Когда функция 902 анализа траектории получила данные о траектории, позиции и векторе скорости из различных источников, эта функция может обрабатывать эти данные и определять желаемую информацию о траектории. Эта информация о траектории может содержать позицию и скорости самостоятельного воздушного судна; планируемую траекторию самостоятельного воздушного судна; позицию и скорости каждого движущегося воздушного судна и планируемую траекторию каждого движущегося воздушного судна. Иными словами, функция 902 анализа траектории может прогнозировать ожидаемую траекторию полета каждого воздушного судна, для которого она была снабжена данными. Кроме того, функция 902 анализа траектории может быть выполнена с возможностью передачи прогнозируемых траекторий функции 906 вычислений.
Функция 906 вычислений может быть выполнена с возможностью обработки прогнозируемых траекторий воздушных судов и выдачи предотвращающих команд для воздушного судна. В частности, прогнозируемые траектории воздушных судов могут использоваться для прогнозирования того, «нарушит» ли некоторое движущееся воздушное судно периметр разделения для самостоятельного воздушного судна в ближайшей точке сближения между этими двумя воздушными судами.
Например, если движущееся воздушное судно прогнозируется быть внутри периметра разделения в их ближайшей точке сближения, то периметр разделения прогнозируется быть «нарушенным». Когда функция 906 вычислений достигает такого прогноза, эта функция может быть сформирована для выдачи предотвращающих команд. Предотвращающие команды могут приоритетно изменять путь полета воздушного судна для исключения риска столкновения. Предотвращающие команды, генерируемые функцией 906 вычислений, могут использоваться в замене пути 306 полета для первого воздушного судна 302 измененным путем 314 полета из фигуры 3.
Функция 906 вычислений использует предельные значения 908 разделения для определения периметра разделения для воздушного судна. Иными словами, предельные значения 908 разделения могут определять размеры периметра разделения. В одном воплощении предельные значения 908 разделения могут определять минимальное расстояние разделения, которое проходит во всех направлениях. В таком воплощении периметр разделения может быть в форме сферы. В дополнительных воплощениях периметр разделения может быть сконфигурирован с множеством слоев на основании параметров времени, вектора скорости воздушного судна, скорости движения воздушного судна и расстояния.
Функция 906 вычислений может также быть сформирована для использования предельных значений 910 реакции в вычислении предотвращающих команд. Предельные значения 910 реакции могут определять быстроту, с которой предотвращающие команды выполняются. Например, предельные значения 910 реакции могут быть установлены таким образом, что, когда прогнозируемая ближайшая точка сближения между самостоятельным воздушным судном и движущимся воздушным судном прогнозируется возникнуть на расстоянии от текущей позиции самостоятельного воздушного судна, которое по существу равно некоторому выбранному пороговому значению или больше, чем некоторое выбранное пороговое значение, функция 906 вычислений может отложить выдачу одной или более предотвращающей команды. И, наоборот, если прогнозируемая ближайшая точка сближения между самостоятельным воздушным судном и движущимся воздушным судном прогнозируется возникнуть на расстоянии от текущей позиции самостоятельного воздушного судна, которое меньше, чем выбранное пороговое значение, функция 906 вычислений может немедленно выдать одну или более предотвращающую команду для исполнения самостоятельным воздушным судном.
В других вариантах реализации предельные значения 910 реакции могут также содержать временные предельные значения. Например, если ближайшая точка сближения, вероятно, возникнет далеко в будущем, например, за пределами предварительно определенного временного интервала, функция 906 вычислений может отложить исполнение предотвращающей команды. Наоборот, если ближайшая точка сближения близка во времени, например, раньше, чем некоторый предварительно определенный временной интервал истечет, функция 906 вычислений может более быстро выдавать предотвращающие команды для исполнения.
Таким образом, функция 906 вычислений может инициировать предотвращение столкновений на основании близости потенциального столкновения с каждым из множества движущихся воздушных судов. Например, воплощение временных предельных значений в качестве предельных значений 910 реакции функцией 906 вычислений может быть подходящим для предотвращения столкновений между воздушными судами с большим оставшимся временем до ближайшей точки сближения. Большее оставшееся время до ближайшей точки сближения может прогнозироваться между двумя воздушными судами, которые летят на малом расстоянии вдоль параллельных путей, следуют друг за другом или движутся на траекториях на большом расстоянии друг от друга с почти нулевым расстоянием в ближайшей точке сближения.
Функция 912 модификации предотвращения может быть сформирована для определения коэффициента усиления, или весовых коэффициентов предотвращения, для одной или более предотвращающей команды, генерируемой функцией 906 вычислений. Весовые коэффициенты предотвращения (Kp,n) могут быть представлены
коэффициентом Kavoidance. как показано на фигуре 7. Весовые коэффициенты предотвращения могут использоваться для определения мощности предотвращающей команды.
Функция 912 модификации предотвращения может увеличивать коэффициент усиления в одной или более предотвращающей команде по мере того, как ближайшая точка сближения между самостоятельным воздушным судном и движущимся воздушным судном приближается. Например, первый набор вычислений предотвращения, предельных значений и коэффициентов усиления может обеспечивать разделение с использованием предотвращающих команд с низким коэффициентом усиления, когда прогнозируемое нарушение слоя периметра разделения является далеким по расстоянию. В другом примере второй набор вычислений предотвращения, предельных значений и коэффициентов усиления может обеспечивать предотвращающие команды с высоким коэффициентом усиления для преодоления нормальных управляющих команд, выдаваемых функцией 804 реакции транспортного средства из фигуры 8, когда прогнозируемое нарушение слоя периметра разделения является близким.
Таким образом, функция 906 вычислений и функция 912 модификации предотвращения могут увеличивать тенденцию самостоятельного воздушного судна изменять его путь полета по мере того, как оно сближается с движущимся воздушным судном. Кроме того, необходимо понимать, что функция 912 модификации предотвращения может быть сформирована для определения отличных коэффициентов усиления для разных генерируемых предотвращающих команд на основании конкретного слоя периметра разделения, который нарушается.
В этих иллюстрирующих примерах функция 914 модификации траектории содержит регулировочные алгоритмы, которые сформированы для модификации траекторий полета, генерируемых функцией 802 выработки траектории. В частности, функция 914 модификации траектории генерирует изменения для траектории полета, также называемые дельтами траектории, на основании предотвращающих команд от функции 912 модификации предотвращения, для которых определены весовые коэффициенты и предельные значения. Функция 914 модификации траектории может затем интегрировать дельту траектории с генерируемой траекторией для производства новой модифицированной траектории.
В некоторых иллюстрирующих примерах функция 912 модификации предотвращения может выдавать предотвращающие команды для изменения маршрута, скорости изменения маршрута, скоростей набора высоты и снижения, скорости, ускорения и/или замедления. Предотвращающие команды затем преобразуются в команды дельты траектории на основании правил управления для воздушного судна, а также желаемой реакции воздушного судна на управляющие команды.
Например, правило управления воздушного судна может быть сконфигурировано для преобразования команды изменения маршрута в команду скорости изменения маршрута на основании правила пропорционального управления с коэффициентом усиления К. В этом случае, когда движущееся воздушное судно прогнозируется нарушить периметр разделения самостоятельного воздушного судна, управляющий регулировочный алгоритм функции 914 модификации траектории может производить дельту, или изменение, маршрута путем деления команды скорости изменения маршрута для предотвращения столкновения на К. В этом случае управляющее правило будет преобразовывать этот результат обратно в команду скорости изменения маршрута.
В другом иллюстрирующем примере, когда предварительно определенная траектория, генерируемая функцией 802 выработки траектории, включает набор промежуточных пунктов, функция 914 модификации траектории может содержать регулировочный алгоритм, который перемещает следующий промежуточный пункт траектории на основании одной или более предотвращающей команды. Таким образом, желаемое изменение маршрута может быть произведено для обеспечения предотвращения столкновения в случае нарушения периметра разделения.
После модификации траектории новая модифицированная траектория 916 может быть передана функции 804 реакции транспортного средства из фигуры 8 для воплощения. Функция 804 реакции транспортного средства может содержать управляющие правила и реакцию транспортного средства. Таким образом, модуль 806 предотвращения столкновений может обеспечивать предотвращение столкновений без необходимости модификации команд управления воздушным судном, как описано со ссылкой на фигуру 4. Иными словами, модуль 806 предотвращения столкновений может быть воплощен в качестве независимой функции, внешней по отношению к управляющей функции и функции управления полетами для воздушного судна, например, внешней по отношению к функции 802 выработки траектории и функции 804 реакции транспортного средства.
Необходимо понимать, что модуль 806 предотвращения столкновений может быть выполнен с возможностью непрерывного мониторинга траекторий самостоятельного воздушного судна и движущихся воздушных судов и прогнозирования будущих «нарушений» периметра разделения с использованием вычислений предотвращения для ближайшей точки сближения между воздушными судами. В ответ функция 914 модификации траектории может непрерывно выполнять регулирования траектории полета всякий раз, когда «нарушения» прогнозируются возникнуть, для гарантии того, что надлежащее разделение между воздушными судами поддерживается.
Теперь рассмотрим фигуру 10, на которой иллюстрация динамического генератора траектории показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере динамический генератор 1002 траектории может представлять собой находящийся на земле генератор траектории, выполненный с возможностью обеспечения «лишенных конфликта» траекторий для множества воздушных судов. Лишенная конфликта траектория полета для воздушного судна - это траектория полета, вдоль которой потенциальные нарушения периметра разделения не прогнозируются возникнуть. Иными словами, траектории воздушных судов, подаваемые динамическим генератором 1002 траектории, сформированы для поддержания желаемых уровней разделения между воздушными судами всегда.
В частности, лишенные конфликта траектории могут генерироваться путем пропускания по отдельности оптимальных, но конфликтных траекторий через симуляцию, которая содержит модели динамики движения транспортных средств, их соответствующие правила управления разделением и прогнозы ветра. Обработка этих траекторий динамическим генератором 1002 траекторий обеспечивает лишенные конфликта траектории.
Например, динамический генератор 1002 траектории может быть выполнен с возможностью приема данных, которые включают сведения 1004 о движении, предельные значения 1006 разделения, предельные значения 1008 реакции, дальность 1010 прогнозирования, прогнозы 1012 ветра и модели 1014 воздушных судов. В свою очередь, динамический генератор 1002 траектории может генерировать множество траекторий полета воздушных судов на основании вычислений ближайшей точки сближения. Эти траектории полета могут содержать трехмерные траектории, равно как и четырехмерные траектории, которые диктуют позиции воздушных судов в конкретное время.
Сведения 1004 о движении может содержать позиции и траектории полета множества движущихся воздушных судов. В этих иллюстрирующих примерах сведения 1004 могут содержать данные о движении, принимаемые от системы оповещения о движении и предотвращения столкновений, системы автоматического зависимого наблюдения, наземной системы управления воздушным движением или систем датчиков наблюдения за движением на борту воздушных судов, а также других систем наблюдения за воздушным движением. В других вариантах реализации сведения 1004 может содержать траектории полета из планов полета, прогнозируемые траектории полета из текущих позиций и векторов скоростей и другие предварительно определенные траектории полета.
Предельные значения 1006 разделения могут определять размеры периметров разделения для множества воздушных судов. В одном иллюстрирующем примере предельные значения 1006 разделения могут определять минимальное расстояние разделения для каждого воздушного судна, которое проходит во всех направлениях. В таком воплощении периметр разделения может быть в форме сферы.
Например, периметр разделения может быть установлен на основании расстояния разделения в одну милю во всех направлениях. В этом примере движущееся воздушное судно считается «нарушившим» периметр разделения, если движущееся воздушное судно ближе, чем на одну милю, в ближайшей точке сближения. В других иллюстрирующих примерах предельные значения 1006 разделения могут быть сформированы для обеспечения других форм периметра разделения, а также множества слоев разделения, как описано выше.
Предельные значения 1008 реакции могут определять быстроту, с которой предотвращающие команды выполняются. В некоторых иллюстрирующих примерах предельные значения 1008 реакции могут содержать временные ограничения для исполнения предотвращающих команд.
Дальность 1010 прогнозирования включает конкретные временные горизонты, для которых динамический генератор 1002 траектории должен генерировать траектории полета для множества воздушных судов. Прогнозы 1012 ветра включают данные о ветре, которые могут быть использованы динамическим генератором траектории для построения траекторий полета. В некоторых иллюстрирующих примерах прогнозы 1012 ветра могут быть получены из авиационных метеорологических сводок, таких как сводки METAR (метеорологическое сообщение с борта летательного аппарата), прогноз погоды в зоне аэродрома от национальной метеорологической службы, а также другие служащие источниками метеорологические сводки.
Модели 1014 воздушных судов могут содержать технические данные воздушных судов. Такие технические данные могут содержать управляющие правила воздушного судна, правила управления воздушным судном, а также рабочую динамику и рабочие качества.
Динамический генератор 1002 траектории может осуществлять одновременное использование сведения 1004, предельных значений 1006 разделения, предельных значений 1008 реакции, дальности 1010 прогнозирования, прогноза 1012 ветра и моделей 1014 воздушных судов для выработки лишенных конфликта траекторий полета для множества воздушных судов. Например, траектории полета, выводимые из сведений 1004, могут быть использованы динамическим генератором 1002 траектории для прогнозирования того, ожидается ли, что в их ближайших точках сближения множество воздушных судов «нарушат» предварительно определенные периметры разделения, определенные предельными значениями 1006 разделения.
На основании этих прогнозов динамический генератор 1002 траектории может изменять траектории полета для выработки лишенных конфликта траекторий, которые предотвращают эти нарушения периметра разделения. В различных воплощениях симуляции могут проводиться с использованием примеров уравнений, показанных на фигуре 7. Кроме того, динамический генератор 1002 траектории может быть выполнен с возможностью использования предельных значений 1008 реакции для исполнения изменений траектории. В некоторых воплощениях динамический генератор 1002 траектории может также учитывать прогнозы 1012 ветра. Например, изменения траектории могут модифицироваться с использованием прогнозов 1012 ветра для учета и/или обнуления нежелательных влияний ветра на траектории полета. В других вариантах реализации динамический генератор 1002 траектории может также учитывать модели 1014 воздушных судов для разработки траекторий полета, которые соответствуют рабочим качествам воздушных судов.
После того, как лишенные конфликта траектории были определены для множества воздушных судов, динамический генератор 1002 траектории может использовать модели 1014 воздушных судов для трансляции лишенных конфликта траекторий в управляющие команды для воплощения внутри каждого из множества воздушных судов. Управляющие команды могут содержать команды изменения скорости изменения маршрута, команды модификации скорости набора высоты и снижения, команды ускорения и замедления и другие управляющие команды, такие как команды изменения скорости, высоты над уровнем моря и изменения маршрута.
Альтернативно, динамический генератор 1002 траектории может предоставлять траектории полета воздушным судам для воплощения автопилотом или системой управления полетами на борту каждого воздушного судна. Например, траектории полета могут быть предоставлены воздушному судну 1016, воздушному судну 1018, воздушному судну 1020 и воздушному судну 1022. Необходимо понимать, что симуляции могут непрерывно выполняться динамическим генератором 1002 траектории до определенного временного горизонта с использованием информации о текущем состоянии воздушных судов и планируемых траекториях или намерениях.
Теперь рассмотрим фигуру 11, на которой иллюстрация системы для обеспечения предотвращения столкновений для воздушного судна показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере система 1100 содержит модуль 1102 управления полетами и модуль 1104 предотвращения столкновений. Модуль 1102 управления полетами может быть воплощен с использованием по меньшей мере одного из следующего: навигационная система 502, автопилот 506 и/или пилотажный командный прибор 508 представленный на фигуре 5. Далее, модуль 1104 предотвращения столкновений может быть воплощен с использованием модуля 524 предотвращения столкновений из фигуры 5, модуля 604 предотвращения столкновений из фигуры 6 и/или модуля 806 предотвращения столкновений из фигуры 8.
В этом иллюстрирующем примере управляющая логика, показанная в модуле 1102 управления полетами и модуле 1104 предотвращения столкновений, используется для выработки команд ускорения набора высоты для управления высотой над уровнем моря воздушного судна, в котором система 1100 воплощена.
Как показано, модуль 1102 управления полетами вычитает измеренную высоту 1106 над уровнем моря из текущей команды 1108 высоты над уровнем моря, используя вычитатель 1109, для выработки результата 1110. Измеренная высота 1106 над уровнем моря может представлять собой высоту над уровнем моря воздушного судна, определенную и/или измеренную с использованием датчиков на борту воздушного судна.
Текущая команда 1108 высоты над уровнем моря - это высота над уровнем моря для воздушного судна, которая в данный момент выбрана пилотом воздушного судна и/или автопилотом воздушного судна. Например, текущая команда 1108 высоты над уровнем моря может генерироваться автопилотом 506, пилотажным командным прибором 508 и/или пилотом воздушного судна, в котором авиационная электронная система 500 воплощена.
Результат 1110 отправляется в компонент 1112 компенсации высоты над уровнем моря. Компонент 1112 компенсации высоты над уровнем моря выполнен с возможностью выработки команды 1114 ускорения набора высоты для воздушного судна. В этом иллюстрирующем примере команда ускорения набора высоты представляет собой команду, которая отправляется на приводящие в действие устройства для поверхностей управления полетом воздушного судна для достижения желаемого ускорения набора высоты. Кроме того, в этом показанном примере компенсации в компоненте 1112 компенсации высоты над уровнем моря может быть присвоен коэффициент усиления, ka.
Желаемое ускорение набора высоты - это ускорение, которое вынуждает воздушное судно набрать высоту или снизиться до высоты над уровнем моря, показанной текущей командой 1108 высоты над уровнем моря. Таким образом, команда 1114 ускорения набора высоты сформирована для вынуждения воздушного судна набирать высоту или снижаться с желаемым ускорением для учета отклонения между измеренной высотой 1106 над уровнем моря и текущей командой 1108 высоты над уровнем моря.
Первая функция 1116 предельных значений прикладывается к команде 1114 ускорения набора высоты для выработки первой команды 1118 ускорения, для которой определены предельные значения. Первая функция 1116 предельных значений сформирована для определения предельных значений для команды 1114 ускорения набора высоты. В качестве одного иллюстрирующего примера, первая функция 1116 предельных значений может быть установлена на уменьшение и/или устранение вероятности нежелательных ходовых качеств для пассажиров во время полета воздушного судна.
В этом иллюстрирующем примере измеренная скорость 1120 набора высоты - это скорость набора высоты для воздушного судна, определенная и/или измеренная с использованием датчиков на борту воздушного судна. Измеренная скорость 1120 набора высоты вычитается из текущей команды 1122 скорости набора высоты с использованием вычитателя 1123 для выработки результата 1124.
Текущая команда 1122 скорости набора высоты - это скорость набора высоты для воздушного судна, которая в данный момент выбрана пилотом воздушного судна и/или автопилотом для воздушного судна. Например, текущая команда 1122 скорости набора высоты может генерироваться автопилотом 506, пилотажным командным прибором 508 и/или пилотом воздушного судна, в котором авиационная электронная система 500 воплощена.
Как показано, результат 1124 отправляется в компонент 1126 компенсации скорости набора высоты. Компонент 1126 компенсации скорости набора высоты выполнен с возможностью выработки команды 1128 ускорения набора высоты для воздушного судна. В этом иллюстрирующем примере компенсации в компоненте 1126 компенсации скорости набора высоты присваивается коэффициент усиления kr. Команда 1128 ускорения набора высоты сформирована для вынуждения воздушного судна набирать высоту или снижаться с желаемым ускорением набора высоты для учета разницы между измеренной скоростью 1120 набора высоты и текущей командой 1122 скорости набора высоты.
В этом иллюстрирующем примере вторая функция 1130 предельных значений прикладывается к команде 1128 ускорения набора высоты для выработки второй команды 1132 ускорения, для которой определены предельные значения. Вторая функция 1130 предельных значений сформирована для определения предельных значений для команды 1128 ускорения набора высоты.
Если принять, что измеренная высота 1106 над уровнем моря и измеренная скорость 1120 набора высоты имеют единичную величину реакции, а коэффициент усиления для компенсации высоты над уровнем моря установлен на ka, и коэффициент усиления для компенсации скорости набора высоты установлен на kr, реакция на текущую команду 1108 высоты над уровнем моря, для которой не определены предельные значения, может быть упрощена следующим образом:

где высота над уровнем моря представляет собой измеренную высоту 1106 над уровнем моря, а команда высоты над уровнем моря представляет собой текущую команду 1108 высоты над уровнем моря.
В этом показанном примере измеренная скорость 1120 набора высоты также используется компонентом 1134 набранной высоты над уровнем моря в модуле 1104 предотвращения столкновений. Компонент 1134 набранной высоты над уровнем моря использует измеренную скорость 1120 набора высоты и время до ближайшей точки сближения между воздушным судном и другим воздушным судном, идентифицируемым как движущееся воздушное судно, для выработки набранного расстояния 1136 по высоте над уровнем моря. В этом иллюстрирующем примере время до ближайшей точки сближения - это период времени между текущим временем и временем, в которое прогнозируется возникнуть ближайшая точка сближения.
Набранное расстояние 1136 по высоте над уровнем моря может представлять собой расстояние по высоте над уровнем моря, прогнозируемое быть набранным во время периода времени между текущим временем, в которое измеренная скорость 1120 набора высоты измерена, и временем ближайшей точки сближения. В некоторых иллюстрирующих примерах набранное расстояние 1136 по высоте над уровнем моря может быть отрицательной величиной. В этих случаях воздушное судно прогнозируется снизиться на величину набранного расстояния по высоте над уровнем моря.
Сумматор 1138 в модуле 1104 предотвращения столкновений выполнен с возможностью суммирования набранного расстояния 1136 по высоте над уровнем моря с измеренной высотой 1106 над уровнем моря для выработки прогнозируемой высоты 1140 над уровнем моря. Прогнозируемая высота 1140 над уровнем моря - это высота над уровнем моря, прогнозируемая для воздушного судна во время ближайшей точки сближения между этим воздушным судном и движущимся воздушным судном.
Как показано, вычитатель 1142 в модуле 1104 предотвращения столкновений выполнен с возможностью вычитания прогнозируемой высоты 1144 над уровнем моря движущегося воздушного судна из прогнозируемой высоты 1140 над уровнем моря для выработки дистанции 1146 пролета. Прогнозируемая высота 1144 над уровнем моря движущегося воздушного судна - это прогнозируемая высота над уровнем моря для движущегося воздушного судна. Прогнозируемая высота 1144 над уровнем моря движущегося воздушного судна может быть основана на плане полета, полученном для этого движущегося воздушного судна; данных слежения; данных датчиков; информации, полученной от системы предотвращения столкновений движущегося воздушного судна; совместно используемых данных от движущегося воздушного судна и/или другой подходящей информации.
Дистанция 1146 пролета - это расстояние по высоте над уровнем моря между воздушным судном и движущимся воздушным судном, прогнозируемое во время ближайшей точки сближения. Когда дистанция 1146 пролета является положительной в этом примере, движущееся воздушное судно может быть ниже рассматриваемого воздушного судна. Когда дистанция 1146 пролета является отрицательной, движущееся воздушное судно может быть выше рассматриваемого воздушного судна.
Компонент 1148 абсолютных значений выполнен с возможностью выработки абсолютной дистанции 1150 пролета с использованием дистанции 1146 пролета. Абсолютная дистанция 1150 пролета - это абсолютное значение дистанции 1146 пролета в этом иллюстрирующем примере.
В этом иллюстрирующем примере модуль 1104 предотвращения столкновений выполнен с возможностью определения того, обеспечивает ли дистанция 1146 пролета желаемый уровень разделения. В частности, желаемый уровень разделения - это задаваемый уровень разделения, такой как задаваемый уровень 140 разделения из фигуры 1. Иными словами, модуль 1104 предотвращения столкновений определяет, является ли дистанция 1146 пролета по существу равной по меньшей мере расстоянию, которое обеспечивает задаваемый уровень разделения.
Как показано, модуль 1104 предотвращения столкновений использует требуемое расстояние 1152 и неопределенность 1154 для установления расстояния для задаваемого уровня разделения. Неопределенность 1154 - это оценка для неопределенности, присутствующей в вычислении прогнозируемой высоты 1140 над уровнем моря для времени ближайшей точки сближения, которая прогнозируется.
Модуль 1104 предотвращения столкновений прикладывает коэффициент 1156 усиления к неопределенности 1154 для выработки результата 1158. Результат 1158 суммируется с требуемым расстоянием 1152 с использованием сумматора 1160 для выработки безопасного расстояния 1162. Безопасное расстояние 1162 затем делится на коэффициент усиления реакции установившегося состояния в компоненте 1164 установившегося состояния для выработки задаваемого расстояния 1166. Задаваемое расстояние 1166 - это расстояние, которое определяет границу для задаваемого уровня разделения, который является желательным.
В этом показанном примере коэффициент усиления реакции установившегося состояния определен следующим образом:


где С - это коэффициент усиления реакции установившегося состояния, Kp - пропорциональный коэффициент усиления, Ki - интегральный коэффициент усиления, b - интегральный рассеивающий коэффициент усиления и s - комплексная переменная.
В этом иллюстрирующем примере модуль 1104 предотвращения столкновений вычитает абсолютную дистанцию 1150 пролета из задаваемого расстояния 1166 с использованием вычитателя 1167 для выработки результата 1168 расстояния. Модуль 1104 предотвращения столкновений использует функцию 1170 для обработки результата 1168 расстояния.
В частности, функция 1170 генерирует восстановительное расстояние 1172 на основании того, является ли результат 1168 расстояния большим, чем ноль. Восстановительное расстояние 1172 - это расстояние, по-прежнему необходимое для обеспечения желаемого уровня разделения. Когда результат 1168 расстояния по существу равен нулю или меньше, чем ноль, восстановительное расстояние 1172 может быть нулевой величиной. Иными словами, когда результат 1168 расстояния по существу равен нулю или меньше, чем ноль, желаемый уровень разделения присутствует.
Если результат 1168 расстояния больше, чем ноль, восстановительное расстояние 1172 является положительной величиной, равной расстоянию, необходимому для восстановления желаемого уровня разделения. Иными словами, когда результат 1168 расстояния больше, чем ноль, желаемый уровень разделения прогнозируется быть отсутствующим во время ближайшей точки сближения.
В этом иллюстрирующем примере восстановительное расстояние 1172 обрабатывается с использованием компонента 1174 команды скорости набора высоты. Компонент 1174 команды скорости набора высоты прикладывает знак дистанции 1146 пролета к восстановительному расстоянию 1172, а затем делит эту величину на время до ближайшей точки сближения для двух воздушных судов для выработки команды 1176 скорости набора высоты.
Положительное значение для команды 1176 скорости набора высоты показывает, что воздушное судно нуждается в наборе высоты для того, чтобы иметь желаемый уровень разделения. Отрицательное значение для команды 1176 скорости набора высоты показывает, что воздушное судно нуждается в снижении для того, чтобы иметь желаемый уровень разделения. Нулевое значение команды 1176 скорости набора высоты показывает, что желаемый уровень разделения уже присутствует.
Как показано, четвертая функция 1178 предельных значений прикладывается к команде 1176 скорости набора высоты для выработки команды 1180 скорости набора высоты, для которой определены предельные значения. Четвертая функция 1178 предельных значений сформирована для гарантии того, что команда не вынуждает воздушное судно набирать высоту или снижаться более быстро, чем является желаемым.
В одном иллюстрирующем примере, когда нарушение разделения прогнозируется, четвертая функция 1178 предельных значений может быть установлена на величину, которая больше, чем у первой функции 1116 предельных значений и/или третьей функции 1190 предельных значений, с тем чтобы произвести команду установившегося состояния для команды 1180 скорости набора высоты, для которой определены предельные значения.
Команда 1180 скорости набора высоты, для которой определены предельные значения, отправляется в компонент 1182 компенсации разделения. Компонент 1182 компенсации разделения выполнен с возможностью выработки команды 1184 ускорения набора высоты с использованием команды 1180 скорости набора высоты, для которой определены предельные значения. Команда 1184 ускорения набора высоты сформирована для учета того, прогнозируется ли желаемый уровень разделения присутствовать во время ближайшей точки сближения.
В этом показанном примере четвертая функция 1178 предельных значений может быть установлена таким образом, что команда 1184 ускорения набора высоты больше, чем команда 1114 ускорения набора высоты. Таким образом, воздушное судно может управляться для маневрирования от текущего пути вопреки текущей команде 1108 высоты над уровнем моря.
В этом иллюстрирующем примере команда 1184 ускорения набора высоты, команда 1114 ускорения набора высоты и команда 1128 ускорения набора высоты суммируются с использованием сумматора 1186 для выработки окончательной команды 1188 ускорения набора высоты. Третья функция 1190 предельных значений прикладывается к окончательной команде 1188 ускорения набора высоты для выработки окончательной команды 1192 ускорения набора высоты, для которой определены предельные значения. Третья функция 1190 предельных значений может быть установлена на величину для максимально безопасной работы воздушного судна. Иными словами, третья функция 1190 предельных значений может задавать предельные значения для окончательной команды 1192 ускорения набора высоты, для которой определены предельные значения, такие, что окончательная команда 1192 ускорения набора высоты, для которой определены предельные значения, не вынуждает воздушное судно маневрировать нежелательным образом.
Окончательная команда 1192 ускорения набора высоты, для которой определены предельные значения, может быть отправлена, например, в автопилот воздушного судна и/или систему управления полетами воздушного судна. Таким образом, окончательная команда ускорения набора высоты, для которой определены предельные значения, представляет собой окончательную управляющую команду для воздушного судна. Эти системы могут управлять приводящими в движение устройствами поверхностей управления полетом воздушного судна с использованием окончательной команды 1192 ускорения набора высоты, для которой определены предельные значения.
Как показано, компонент 1194 реакции воздушного судна представляет собой фактическую реакцию воздушного судна на окончательную команду 1192 ускорения набора высоты, для которой определены предельные значения. В этой управляющей системе выход компонента 1194 реакции воздушного судна может представлять собой фактическую скорость 1195 набора высоты и фактическую высоту 1196 над уровнем моря воздушного судна. Датчиковый компонент 1197 может измерять скорость набора высоты воздушного судна для выработки измеренной скорости 1120 набора высоты. Датчиковый компонент 1198 может измерять высоту над уровнем моря воздушного судна для выработки измеренной высоты 1106 над уровнем моря.
В этом иллюстрирующем примере первая функция 1116 предельных значений, вторая функция 1130 предельных значений, третья функция 1190 предельных значений и четвертая функция 1178 предельных значений могут регулироваться для обеспечения желаемой величины окончательной команды 1188 ускорения набора высоты. В частности, эти предельные значения могут регулироваться для помещения желаемых предельных значений на различные команды ускорения набора высоты, используемые для формирования окончательной команды 1188 ускорения набора высоты.
Таким образом, система 1100 обеспечивает способность воздушного судна изменять его путь полета, когда прогнозируемая дистанция пролета в ближайшей точке сближения не обеспечивает желаемого уровня разделения между воздушным судном и движущимся воздушным судном.
Теперь рассмотрим фигуру 12, на которой иллюстрация компонента 1182 компенсации разделения показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере компонент 1182 компенсации разделения из фигуры 11 показан более подробно.
Как показано, компонент 1182 компенсации разделения содержит пропорциональный коэффициент 1202 усиления, интегральный коэффициент 1204 усиления, интегральный рассеивающий коэффициент 1206 усиления и сумматор 1208. В этом иллюстрирующем примере выходной сигнал интегрального рассеивающего коэффициента 1206 усиления вычитается из команды 1180 скорости набора высоты, для которой определены предельные значения, из фигуры 11 с использованием вычитателя 1209 для выработки результата 1210. Интегральный коэффициент 1204 усиления прикладывается к результату 1210 для выработки результата 1211. Интегральный рассеивающий коэффициент 1206 усиления прикладывается к результату 1211 для выработки выходного сигнала 1212, который вычитается из команды 1180 скорости набора высоты, для которой определены предельные значения.
Кроме того, пропорциональный коэффициент 1202 усиления прикладывается к команде 1180 скорости набора высоты, для которой определены предельные значения, для выработки результата 1214. Результат 1211 и результат 1214 суммируются друг с другом с использованием сумматора 1208 для формирования команды 1184 ускорения набора высоты, описанной со ссылкой на фигуру 11.
С помощью системы 1100 из фигуры 11 и компонента 1182 компенсации разделения из фигур 11 и 12 восстановительное расстояние 1172 может быть интегрировано с выдаваемой скоростью, для которой определяются предельные значения четвертой функцией 1178 предельных значений. Команда 1184 ускорения набора высоты может командовать воздушному судну смещаться от высоты над уровнем моря, командуемой текущей командой 1108 высоты над уровнем моря. При этом команда 1184 ускорения набора высоты может конкурировать с командой 1114 ускорения набора высоты и превосходит команду 1114 ускорения набора высоты, когда команда 1114 ускорения набора высоты достигает предельного значения, определенного первой функцией 1116 предельных значений.
Альтернативно, обратная связь, обеспечиваемая модулем 1104 предотвращения столкновений, может быть сформирована для того, чтобы превосходить команду 1114 ускорения набора высоты путем установления коэффициента усиления для команды 1114 ускорения набора высоты на ноль или ограничения команды 1114 ускорения набора высоты так, что команда 1184 ускорения набора высоты, генерируемая модулем 1104 предотвращения столкновений, имеет возможность восстанавливать желаемый уровень разделения.
В этих иллюстрирующих примерах функция переходной реакции дистанции 1146 пролета в задаваемое расстояние 1166 может быть задана следующим уравнением:

Кроме того, когда для компенсации высоты над уровнем моря заданы предельные значения, функция переходной реакции может быть следующей:
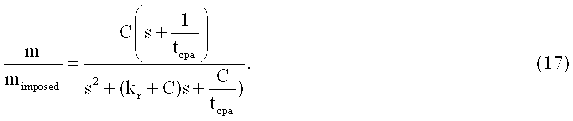
Когда два воздушных судна летят в воздушном пространстве, время до ближайшей точки сближения между этими двумя воздушными судами может быть изначально большим. В результате функция переходной реакции может быть приближена к следующему уравнению:


В одном иллюстрирующем примере интегральный коэффициент усиления, KI, может быть установлен следующим образом:


Если интегральный рассеивающий коэффициент усиления, b, установлен на ноль, то функция переходной реакции может становиться следующей:

С использованием этого соотношения пропорциональный коэффициент усиления, Kp, может быть установлен для установления временной константы реакции в поддержании желаемого уровня разделения. Например, в одном иллюстрирующем примере интегральный рассеивающий коэффициент усиления, b, может быть установлен следующим образом:

Следовательно,

в силу чего коэффициент усиления реакции установившегося состояния является следующим:

В этом иллюстрирующем примере пропорциональный коэффициент усиления, Kp, может быть представлен как функция kr. В частности,


где k - это выбранный коэффициент усиления для kr.
В этом примере коэффициент усиления реакции установившегося состояния меньше единицы. В результате задаваемое расстояние 1166 может быть установлено на значение, большее, чем величина безопасного расстояния 1162, когда безопасное расстояние 1162 делится на коэффициент усиления реакции установившегося состояния с использованием компонента 1164 установившегося состояния.
При большем задаваемом расстоянии 1166 воздушное судно может быть защищено от повторяющегося циркулирования между выполнением маневра уклонения для изменения его текущего пути полета и возвращением обратно на текущий путь полета для поддержания его желаемой траектории полета. В частности, задаваемое расстояние 1166 устанавливается таким образом, что условие установившегося состояния может оставаться внутри этой границы.
В этих иллюстрирующих примерах увеличение пропорционального коэффициента усиления, Kp, может уменьшать ошибку установившегося состояния для модуля 1104 предотвращения столкновений и может увеличивать быстроту реакции маневра для достижения желаемого уровня разделения, прогнозируемого как отсутствующий во время ближайшей точки сближения.
Кроме того, в этих иллюстрирующих примерах некоторое количество параметров, используемых в модуле 1104 предотвращения столкновений, может быть выбрано таким образом, что реакция воздушного судна на окончательную команду 1192 ускорения набора высоты, для которой определены предельные значения, является желаемой реакцией. Например, на величину времени до ближайшей точки сближения могут быть наложены предельные значения таким образом, что на результирующий коэффициент усиления компонента 1174 команды скорости набора высоты тоже накладываются предельные значения.
В качестве другого примера, пропорциональный коэффициент усиления, Kp, интегральный коэффициент усиления, KI, и выбранный коэффициент усиления, k, могут быть выбраны таким образом, что воздушное судно реагирует на окончательную команду 1192 ускорения набора высоты, для которой определены предельные значения, желаемым образом. Разумеется, в зависимости от воплощения, модуль 1104 предотвращения столкновений может быть выполнен с величинами и/или предельными значениями для любого количества параметров для различных компонентов внутри модуля 1104 предотвращения столкновений, так что воздушное судно маневрирует так, как является желаемым.
Иллюстрация системы 1100 на фигуре 11 и компонента 1182 компенсации разделения на фигуре 12 не имеют целью внести физические или архитектурные ограничения в способ, которым предпочтительный вариант реализации может быть воплощен. Другие компоненты в дополнение и/или вместо тех, что изображены, могут быть использованы. Некоторые компоненты могут быть ненужными. Кроме того, хотя система 1100 была показана для высоты над уровнем моря, компенсация в других направлениях может быть воплощена таким же образом.
Теперь рассмотрим фигуру 13, на которой иллюстрация сближения между двумя воздушными судами показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере воздушное судно 1300 и движущееся воздушное судно 1302 летят в воздушном пространстве.
Как показано, величина вектора 1304 дальности, R, показывает текущее расстояние между воздушным судном 1300 и движущимся воздушным судном 1302. Величина вектора 1306 дистанции пролета в ближайшей точке сближения - это дистанция пролета в ближайшей точке сближения, прогнозируемая для воздушного судна 1300 и движущегося воздушного судна 1302. Иными словами, величина вектора 1306 дистанции пролета - это расстояние, прогнозируемое между воздушным судном 1300 и движущимся воздушным судном 1302 в ближайшей точке сближения. Кроме того, величина вектора 1308 относительной скорости, Vrel, - это скорость воздушного судна 1300 относительно движущегося воздушного судна 1302.
В этом иллюстрирующем примере направление вектора 1308 относительной скорости может быть изменено для увеличения дистанции пролета. Например, воздушное судно 1300 может маневрировать в некотором сочетании направления вектора 1310 и направления вектора 1312, (Vrel×R). Эти два вектора - вектор 1310 и вектор 1312 - расположенные под прямым углом друг к другу векторы в этом примере. Вектор 1312 - это вектор, являющийся векторным произведением вектора 1308 относительной скорости и вектора 1304 дальности, или Vrel×R. Вектор 1310 - это вектор, являющийся векторным произведением вектора 1308 относительной скорости и вектора 1312, или Vrel×Vrel×R.
Направление вектора 1310 может быть по существу таким же, что и направление вектора 1306 дистанции пролета. Изменение пути полета воздушного судна 1300 для обеспечения желаемого уровня разделения посредством изменения относительной скорости воздушного судна 1300 в направлении вектора 1310 может требовать меньшего изменения в скорости, чем посредством изменения относительной скорости воздушного судна 1300 в направлении вектора 1312.
Кроме того, изменение направления относительной скорости воздушного судна 1300 в направлении вектора 1312 может вынуждать относительное перемещение воздушного судна 1300 перемещаться спиральным образом вокруг движущегося воздушного судна 1302 нежелательным образом. В некоторых иллюстрирующих примерах направление вектора 1310 может быть сдерживаемым направлением при полете. В этих случаях воздушное судно может маневрировать в направлении вектора 1312 до тех пор, пока сдерживание не снято.
Разумеется, другие факторы могут учитываться при выборе направления для маневра воздушного судна. Например, воздушное судно может быть способно изменять скорость более быстро в некотором направлении по сравнению с другими направлениями. Например, воздушное судно может быть способно снижаться более эффективно, чем поворачиваться.
Теперь рассмотрим фигуру 14, на которой иллюстрация еще одного сближения между двумя воздушными судами показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере сближение между воздушным судном 1400 и движущимся воздушным судном 1402 представляет собой сближение с нулевой дистанцией пролета. Иными словами, расстояние, прогнозируемое между воздушным судном 1400 и движущимся воздушным судном 1402 в ближайшей точке сближения, может быть по существу нулевым.
Как показано, воздушное судно 1400 имеет вектор 1404 скорости, V. Движущееся воздушное судно 1402 имеет вектор 1406 скорости, Vtraffic. Далее, величина вектора 1408 относительной скорости - это относительная скорость воздушного судна 1400 относительно движущегося воздушного судна 1402. Величина вектора 1410 дальности, R, - это текущее расстояние между воздушным судном 1400 и движущимся воздушным судном 1402.
В этом иллюстрирующем примере, когда вектор 1408 относительной скорости близок к нулю, или когда вектор 1408 относительной скорости и вектор 1410 дальности по существу выровнены или почти выровнены, вектор, являющийся векторным произведением вектора 1408 относительной скорости и вектора 1410 дальности, Vrel×R, и вектор, являющийся векторным произведением вектора 1408 относительной скорости и вектора, являющегося векторным произведением вектора 1408 относительной скорости и вектора 1410 дальности, Vrel×(Vrel×R), могут быть по существу нулевыми или близкими к нулю. Если Vrel×R по существу близко к нулю, вектор 1404 скорости воздушного судна 1400 может использоваться вместо вектора 1408 относительной скорости до тех пор, пока Vrel×R не перестанет быть близким к нулю.
Для обеспечения желаемого уровня разделения воздушное судно 1400 может изменять его путь полета посредством перемещения в направлении, которое является сочетанием направления для вектора 1412 и направления для вектора 1414. Вектор 1414 - это вектор, являющийся векторным произведением вектора 1410 дальности и вектора 1404 скорости, или V×R. Вектор 1412 - это векторное произведение вектора 1410 дальности и вектора 1414, или R×(R×V). В этом иллюстрирующем примере предпочтительным направлением может быть направление для вектора 1412.
Теперь рассмотрим фигуру 15, на которой иллюстрация сближения между двумя воздушными судами показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере сближение между воздушным судном 1500 и воздушным судном 1502 представляет собой сближение при нулевой относительной скорости. Иными словами, относительная скорость между воздушным судном 1500 и воздушным судном 1502 является по существу нулевой.
Например, воздушное судно 1500 и воздушное судно 1502 могут двигаться вдоль по существу параллельных путей полета. Как показано, воздушное судно 1500 имеет вектор 1504 скорости, V, а воздушное судно 1502 имеет вектор 1506 скорости, Vtraffic.
В этом примере вектор 1504 скорости и вектор 1506 скорости имеют по существу одинаковую величину и по существу одинаковое направление. Иными словами, относительная скорость для воздушного судна 1500 по отношению к воздушному судну 1502 является по существу нулевой в этом иллюстрирующем примере. Как показано, величина вектора 1508 дальности, R, представляет собой текущее расстояние между воздушным судном 1500 и воздушным судном 1502.
Для обеспечения желаемого уровня разделения воздушное судно 1500 может изменить его путь полета посредством перемещения в направлении, которое является сочетанием направления для вектора 1510, R×(R×V), и направления для вектора 1512, R×V. В этом иллюстрирующем примере предпочтительным направлением может быть направление для вектора 1510. Вектор 1512 представляет собой вектор, являющийся векторным произведением вектора 1508 дальности и вектора 1504 скорости, или R×V. Вектор 1510 представляет собой векторное произведение вектора 1508 дальности и вектора 1512, или R×(R×V).
В некоторых случаях предпочтительным направлением может быть следующее: знак скалярного произведения вектора 1508 дальности и вектора 1504 скорости для воздушного судна 1500, умноженный на вектор 1504 скорости. Таким образом, воздушное судно 1500 может обогнать движущееся воздушное судно 1502 или идти позади движущегося воздушного судна 1502.
Теперь рассмотрим фигуру 16, на которой иллюстрация сближения между двумя воздушными судами показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере сближение между воздушным судном 1600 и воздушным судном 1602 может представлять собой сближение на встречных курсах или догоняющее сближение. Иными словами, воздушное судно 1600 и воздушное судно 1602 могут лететь друг на друга.
В этом иллюстрирующем примере воздушное судно 1600 имеет вектор 1604 скорости, V, а воздушное судно 1602 имеет вектор 1606 скорости, Vtraffic. Величина вектора 1608 относительной скорости - это относительная скорость воздушного судна 1600 по отношению к воздушному судну 1602. Величина вектора 1610 дальности, R, - это текущее расстояние между воздушным судном 1600 и воздушным судном 1602.
При таком типе сближения как векторное произведение вектора 1608 относительной скорости и вектора 1610 дальности, или Vrel×R, так и векторное произведение вектора 1610 дальности и вектора 1604 скорости, или R×V, являются по существу нулевыми. В результате направления вектора 1612, R×(-R×Z), и вектора 1614, R×Z, могут быть использованы для выполнения маневров для обеспечения желаемого уровня разделения. Вектор 1614 - это отрицательное векторное произведение вектора 1610 дальности и направления Z. Вектор 1612 - это векторное произведение вектора 1610 дальности и вектора 1614.
Теперь рассмотрим фигуру 17, на которой иллюстрация двух воздушных судов, летящих в воздушном пространстве, показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере воздушное судно 1700 и воздушное судно 1702 летят в воздушном пространстве 1704. Величина вектора 1706 относительной скорости - это относительная скорость воздушного судна 1700 по отношению к воздушному судну 1702. Величина вектора 1708 дальности - это текущее расстояние между воздушным судном 1700 и воздушным судном 1702.
В этом иллюстрирующем примере периметр 1710 разделения был определен для воздушного судна 1700. Воздушное судно 1700 в данный момент находится в позиции 1705 внутри периметра 1710 разделения. Как правило, когда время до ближайшей точки сближения между воздушным судном 1700 и воздушным судном 1702 является отрицательным, показывая, что два воздушных судна движутся друг от друга, предотвращающие команды, генерируемые для маневрирования воздушного судна, могут представлять собой нулевые команды.
Однако, когда воздушное судно 1702 находится внутри периметра 1710 разделения, может быть желательным маневрировать дальше от воздушного судна 1700. В частности, воздушное судно 1702 может использовать модифицированный вектор 1714 относительной скорости для вычисления времени до ближайшей точки сближения и других параметров, которые могут использоваться для выработки предотвращающих столкновение команд. Модифицированный вектор 1714 относительной скорости выбирается таким образом, чтобы сохранить время до ближайшей точки сближения положительным или нулевым. Иными словами, модифицированный вектор 1714 относительной скорости выбирается таким образом, чтобы сохранить время до ближайшей точки сближения неотрицательным. В частности,


где dmin - это минимальное расстояние для желаемого уровня разделения между воздушным судном 1700 и воздушным судном 1702, Vrel - это вектор 1706 относительной скорости, R - это вектор 1708 дальности, a Vrel_mod - это модифицированный вектор 1714 относительной скорости. В этом иллюстрирующем примере минимальное расстояние dmin определяет периметр 1710 разделения.
Теперь рассмотрим фигуру 18, на которой иллюстрация схемы работы процесса для управления транспортными средствами показана согласно предпочтительному варианту реализации. Процесс, изображенный на фигуре 18, может быть воплощен с использованием модуля 112 из фигуры 1.
Процесс начинается установлением первого пути для первого транспортного средства (операция 1800). Процесс затем устанавливает второй путь для второго транспортного средства (операция 1802). Первый путь содержит вектор скорости для первого транспортного средства. Второй путь содержит вектор скорости для второго транспортного средства.
Процесс затем прогнозирует ближайшую точку сближения между первым транспортным средством, движущимся вдоль первого пути, и вторым транспортным средством, движущимся вдоль второго пути (операция 1804). Ближайшая точка сближения между первым транспортным средством и вторым транспортным средством прогнозируется возникнуть, когда расстояние между первым транспортным средством и вторым транспортным средством имеет минимальное значение, если первое транспортное средство продолжает двигаться вдоль первого пути, а второе транспортное средство продолжает двигаться вдоль второго пути.
Далее процесс устанавливает дистанцию пролета между первым транспортным средством и вторым транспортным средством в ближайшей точке сближения (операция 1806). Процесс затем определяет, прогнозируется ли желаемый уровень разделения между первым транспортным средством и вторым транспортным средством в ближайшей точке сближения, на основании дистанции пролета (операция 1808). Желаемый уровень разделения может быть выбран из одного из следующего: требуемый уровень разделения, безопасный уровень разделения и задаваемый уровень разделения.
Если желаемый уровень разделения не прогнозируется в ближайшей точке сближения, процесс затем генерирует некоторое количество компенсирующих команд для изменения первого пути первого транспортного средства с использованием ближайшей точки сближения и желаемого уровня разделения между первым транспортным средством и вторым транспортным средством (операция 1810). После этого процесс интегрирует это некоторое количество компенсирующих команд с некоторым количеством управляющих команд для первого транспортного средства для формирования окончательного количества управляющих команд, сформированных для маневрирования первого транспортного средства для по существу поддержания желаемого уровня разделения между первым транспортным средством и вторым транспортным средством (операция 1812). Кроме того, окончательное количество управляющих команд сконфигурировано таким образом, что реакция первого транспортного средства на это окончательное количество управляющих команд представляет собой желаемую реакцию.
Процесс осуществляет мониторинг движения первого транспортного средства и второго транспортного средства (операция 1814), а затем процесс возвращается к операции 1804, описанной выше. Снова рассмотрим операцию 1808; если желаемый уровень разделения прогнозируется в ближайшей точке сближения, процесс переходит на операцию 1814.
Схемы работы и блок-схемы в различных показанных вариантах реализации иллюстрируют архитектуру, функциональность и работу некоторых возможных воплощений устройств и способов в предпочтительном варианте реализации. В этом отношении каждый блок в схеме работы или блок-схемах может представлять модуль, сегмент, функцию и/или часть работы или этап. Например, один или более из блоков может быть воплощен в виде программного кода, в аппаратном обеспечении или сочетании программного кода и аппаратного обеспечения. При воплощении в аппаратном обеспечении аппаратное обеспечение может, например, иметь форму интегральных схем, которые изготовлены или сконфигурированы для выполнения одной или более операции в схемах работы или блок-схемах.
В некоторых альтернативных воплощениях предпочтительного варианта реализации функция или функции, упомянутые в блоке, может или могут происходить не в порядке, показанном на фигурах. Например, в некоторых случаях два блока, показанных последовательно, могут исполняться по существу параллельно, или блоки могут иногда исполняться в обратном порядке, в зависимости от предусмотренной функциональности. Кроме того, другие блоки могут быть добавлены в дополнение к изображенным блокам в схеме работы или блок-схеме.
Теперь рассмотрим фигуру 19, на которой иллюстрация обрабатывающей данные системы показана согласно предпочтительному варианту реализации. В этом иллюстрирующем примере обрабатывающая данные система 1900 может использоваться для воплощения одной или более из некоторого количества ЭВМ 11 в вычислительной системе 108 из фигуры 1. Кроме того, обрабатывающая данные система 1900 может использоваться для воплощения по меньшей мере одного из следующего: автопилот 506, пилотажный командный прибор 508, ЭВМ 512 предотвращения столкновений и/или процессоры 514 из фигуры 5.
Как показано обрабатывающая данные система 1900 содержит коммуникационную структуру 1902. Коммуникационная структура 1902 обеспечивает коммуникации между процессорным блоком 1904, памятью 1906, постоянной памятью 1908, коммуникационным блоком 1910, блоком 1912 ввода/вывода и дисплеем 1914 в обрабатывающей данные системе 1900.
Процессорный блок 1904 служит для исполнения инструкций для программного обеспечения, которые могут быть загружены в память 1906. Процессорный блок 1904 может представлять собой некоторое количество процессоров, мультипроцессорное ядро или некоторый другой тип процессора, в зависимости от конкретного воплощения. Термин «некоторое количество», используемый в настоящем документе со ссылкой на некоторое изделие, означает одно или более такое изделие. Кроме того, процессорный блок 1904 может быть воплощен с использованием некоторого количества гетерогенных процессорных систем, в которых главный процессор находится с вторичными процессорами на одном чипе. В качестве еще одного иллюстрирующего примера, процессорный блок 1904 может представлять собой симметричную мультипроцессорную систему, содержащую множество процессоров одного типа.
Память 1906 и постоянная память 1908 представляют собой примеры запоминающих устройств 1916. Запоминающее устройство - это любое изделие аппаратного обеспечения, которое способно хранить информацию, такую как, например, без ограничения, данные, программный код в функциональной форме и/или другая подходящая информация, временно и/или постоянно. Запоминающие устройства 1916 могут также называться читаемыми ЭВМ запоминающими устройствами в этих примерах. Память 1906 в этих примерах может представлять собой, например, оперативное запоминающее устройство или любое другое подходящее энергозависимое или энергонезависимое запоминающее устройство. Постоянная память 1908 может быть в различных формах, в зависимости от конкретного воплощения.
Например, постоянная память 1908 может содержать один или более компонент либо одно или более устройство. Например, постоянная память 1908 может представлять собой накопитель на жестких дисках, флэш-память, перезаписываемый оптический диск, перезаписываемую магнитную ленту или некоторое сочетание вышеперечисленного. Носитель, используемый постоянной памятью 1908, также может быть съемным. Например, съемный накопитель на жестких дисках может быть использован для постоянной памяти 1908.
Коммуникационный блок 1910 в этих примерах обеспечивает коммуникацию с другими обрабатывающими данные системами или устройствами. В этих примерах коммуникационный блок 1910 представляет собой сетевую интерфейсную карту. Коммуникационный блок 1910 может обеспечивать коммуникации посредством использования как физических, так и беспроводных коммуникационных каналов.
Блок 1912 ввода/вывода обеспечивает возможность ввода и вывода данных с помощью других устройств, которые могут быть присоединены к обрабатывающей данные системе 1900. Например, блок 1912 ввода/вывода может обеспечивать соединение для пользовательского ввода посредством клавиатуры, «мыши» и/или некоторого другого подходящего устройства ввода. Кроме того, блок 1912 ввода/вывода может отправлять вывод на принтер. Дисплей 1914 обеспечивает механизм для отображения информации для пользователя.
Инструкции для работы системы, приложений и/или программ могут быть расположены в запоминающих устройствах 1916, которые находятся в коммуникации с процессорным блоком 1904 через коммуникационную структуру 1902. В этих иллюстрирующих примерах инструкции находятся в функциональной форме в постоянной памяти 1908. Эти инструкции могут быть загружены в память 1906 для исполнения процессорным блоком 1904. Процессы различных вариантов реализации могут выполняться процессорным блоком 1904 с использованием воплощенных для ЭВМ инструкций, которые могут быть расположены в памяти, такой как память 1906.
Эти инструкции называются программным кодом, используемым ЭВМ программным кодом или читаемым ЭВМ программным кодом, который может читаться и исполняться процессором в процессорном блоке 1904. Программный код в различных вариантах реализации может быть реализован на различных физических или читаемых ЭВМ запоминающих носителях, таких как память 1906 или постоянная память 1908.
Программный код 1918 расположен в функциональной форме на читаемом ЭВМ носителе 1920, который является выборочно съемным, и может быть загружен или перенесен в обрабатывающую данные систему 1900 для исполнения процессорным блоком 1904. Программный код 1918 и читаемый ЭВМ носитель 1920 формируют программный продукт 1922 для ЭВМ в этих примерах. В одном примере читаемый ЭВМ носитель 1920 может представлять собой читаемый ЭВМ запоминающий носитель 1924 или читаемый ЭВМ сигнальный носитель 1926. Читаемый ЭВМ запоминающий носитель 1924 может содержать, например, оптический или магнитный диск, который вводится или помещается в привод или другое устройство, которое является частью постоянной памяти 1908, для передачи данных на запоминающее устройство, такое как накопитель на жестких дисках, которое является частью постоянной памяти 1908. Читаемый ЭВМ запоминающий носитель 1924 также может иметь форму постоянной памяти, такой как накопитель на жестких дисках, флэш-накопитель или флэш-память, которая присоединяется к обрабатывающей данные системе 1900. В некоторых случаях читаемый ЭВМ запоминающий носитель 1924 может не быть съемным с обрабатывающей данные системы 1900. В этих примерах читаемый ЭВМ запоминающий носитель 1924 представляет собой физическое или материальное запоминающее устройство, используемое для хранения программного кода 1918, а не накопитель, который распространяет или передает программный код 1918. Читаемый ЭВМ запоминающий носитель 1924 также называется читаемым ЭВМ материальным запоминающим устройством или читаемым ЭВМ физическим запоминающим устройством. Иными словами, читаемый ЭВМ запоминающий носитель 1924 представляет собой носитель, которого может коснуться человек.
Альтернативно, программный код 1918 может передаваться в обрабатывающую данные систему 1900 с использованием читаемого ЭВМ сигнального носителя 1926. Читаемый ЭВМ сигнальный носитель 1926 может представлять собой, например, распространяющийся сигнал данных, содержащий программный код 1918. Например, читаемый ЭВМ сигнальный носитель 1926 может представлять собой электромагнитный сигнал, оптический сигнал и/или любой другой подходящий тип сигнала. Эти сигналы могут передаваться по коммуникационным каналам, таким как беспроводные коммуникационные каналы, оптоволоконный кабель, коаксиальный кабель, электрический кабель и/или любой другой подходящий тип коммуникационного канала. Иными словами, коммуникационный канал и/или коммуникационное соединение может быть физическим или беспроводным в иллюстрирующих примерах.
В некоторых предпочтительных вариантах реализации программный код 1918 может быть загружен по сети в постоянную память 1908 из другого устройства или другой обрабатывающей данные системы посредством читаемого ЭВМ сигнального носителя 1926 для использования в обрабатывающей данные системе. Например, программный код, сохраненный в читаемом ЭВМ запоминающем носителе в серверной обрабатывающей данные системе, может быть загружен по сети с сервера в обрабатывающую разные систему 1900. Обрабатывающая данные система, предоставляющая программный код 1918, может представлять собой ЭВМ-сервер, клиентскую ЭВМ или некоторое другое устройство, способное хранить и передавать программный код 1918.
Различные компоненты, изображенные для обрабатывающей данные системы 1900, не имеют целью внести архитектурные ограничения в способ, которым различные варианты реализации могут быть воплощены. Различные предпочтительные варианты реализации могут быть воплощены в обрабатывающей данные системе, включающие компоненты в дополнение к тем или вместо тех, что изображены для обрабатывающей данные системы 1900. Другие компоненты, показанные на фигуре 19, могут отличаться от показанных иллюстрирующих примеров. Различные варианты реализации могут быть воплощены с использованием любого аппаратного устройства или любой аппаратной системы, способного или способной исполнять программный код. В качестве одного примера, обрабатывающая данные система может содержать органические компоненты, интегрированные с неорганическими компонентами, и/или может состоять полностью из органических компонентов, не считая человека. Например, запоминающее устройство может состоять из органического полупроводника.
В еще одном иллюстрирующем примере процессорный блок 1904 может иметь форму аппаратного блока, который имеет схемы, которые изготовлены или сконфигурированы для конкретного применения. Этот тип аппаратного обеспечения может выполнять операции без необходимости загрузки программного кода в память из некоторого запоминающего устройства с целью конфигурирования для выполнения операций.
Например, когда процессорный блок 1904 имеет форму аппаратного блока, процессорный блок 1904 может представлять собой систему схем, специализированную интегральную схему, программируемое логическое устройство или некоторый другой подходящий тип аппаратного обеспечения, выполненные с возможностью выполнения некоторого количества операций. Что касается программируемого логического устройства, это устройство сконфигурировано для выполнения некоторого количества операций. Это устройство может быть переконфигурировано в более позднее время или может быть постоянно сконфигурировано для выполнения некоторого количества операций. Примеры программируемых логических устройств включают, например, программируемую логическую матрицу, программируемую пользователем логическую матрицу, программируемую пользователем вентильную матрицу и другие подходящие аппаратные устройства. При этом типе воплощения программный код 1918 может быть опущен, поскольку процессы для различных вариантов реализации воплощены в аппаратном блоке.
В еще одном иллюстрирующем примере процессорный блок 1904 может быть воплощен с использованием комбинации процессоров, используемых в ЭВМ, и аппаратных блоков. Процессорный блок 1904 может иметь некоторое количество аппаратных блоков и некоторое количество процессоров, которые сконфигурированы для выполнения программного кода 1918. В этом показанном примере некоторые из процессов могут воплощаться в некотором количестве аппаратных блоков, в то время как другие процессы могут воплощаться в некотором количестве процессоров.
В еще одном примере система шин может быть использована для воплощения коммуникационной структуры 1902 и может состоять из одной или более шины, такой как системная шина или шина ввода/вывода. Разумеется, система шин может быть воплощена с использованием любого подходящего типа архитектуры, который позволяет передавать данные между различными компонентами устройств, присоединенных к системе шин.
Кроме того, коммуникационный блок может содержать некоторое количество дополнительных устройств, которые передают данные, принимают данные или передают и принимают данные. Коммуникационный блок может представлять собой, например, модем или сетевой адаптер, два сетевых адаптера или некоторое их сочетание. Кроме того, память может представлять собой, например, память 1906 или кэш, такой как используемый в контроллере-концентраторе интерфейса и памяти, который может иметься в коммуникационной структуре 1902.
Теперь рассмотрим фигуру 20, на которой иллюстрация вида сбоку воздушного судна показана согласно предпочтительному варианту реализации, в этом иллюстрирующем примере воздушное судно 2000 представляет собой пример одного воплощения для первого воздушного судна 104 из фигуры 1, второго воздушного судна 105 из фигуры 1, первого воздушного судна 302 из фигуры 3, второго воздушного судна 304 из фигуры 3, первого воздушного судна 402 из фигуры 4 и/или второго воздушного судна 404 из фигуры 4.
Как показано, воздушное судно 2000 содержит один или более движительный блок 2004, присоединенный к фюзеляжу 2002; кабину 2006 пилотов в фюзеляже 2002; крылья 2008; хвост 2010; шасси 2012; управляющую систему (не показана) и другие подходящие типы систем, которые обеспечивают надлежащую работу воздушного судна 2000. По меньшей мере один компонент системы предотвращения столкновений с центром в транспортном средстве может быть расположен внутри фюзеляжа 2002. При этом компоненты системы предотвращения столкновений могут быть распределены по различным частям воздушного судна 2000.
Как показано в вышеприведенном тексте и на фигурах, раскрыта система, включающая модуль 112, выполненный с возможностью прогнозирования ближайшей точки 121 сближения между первым транспортным средством, движущимся вдоль первого пути 116, и вторым транспортным средством, движущимся вдоль второго пути 118, с использованием первого пути 116 и второго пути 118; и для выработки некоторого количества компенсирующих команд 130 для изменения первого пути 116 первого транспортного средства с использованием ближайшей точки 121 сближения и желаемого уровня разделения 106 между первым транспортным средством и вторым транспортным средством.
Кроме того, система может интегрировать это некоторое количество компенсирующих команд 130 с некоторым количеством управляющих команд 133 для первого транспортного средства с целью формирования окончательного количества управляющих команд 143, сформированных для маневрирования первого транспортного средства для по существу поддержания желаемого уровня разделения 106 между первым транспортным средством и вторым транспортным средством, причем реакция первого транспортного средства на окончательное количество управляющих команд 143 представляет собой желаемую реакцию 145.
Кроме того, система может быть также сконфигурирована для выработки некоторого количества компенсирующих команд 130, причем модуль 112 выполнен с возможностью выработки некоторого количества компенсирующих команд 130 для изменения первого пути 116 первого транспортного средства с использованием ближайшей точки 121 сближения, желаемого уровня разделения 106 между первым транспортным средством и вторым транспортным средством и времени 120 до ближайшей точки 121 сближения.
В одном варианте система может содержать первое транспортное средство, которое представляет собой первое воздушное судно 104, и второе транспортное средство, которое представляет собой второе воздушное судно 105, а также содержит: модуль 602 управления полетами, причем модуль 602 управления полетами выполнен с возможностью выработки некоторого количества управляющих команд 133 и приложения первого набора функций предельных значений к указанному некоторому количеству управляющих команд 133, а модуль 112 выполнен с возможностью приложения второго набора функций предельных значений к указанному некоторому количеству компенсирующих команд 130, причем первый набор функций предельных значений и второй набор функций предельных значений сформированы для уменьшения вероятности полета первого воздушного судна 104 нежелательным образом.
В еще одной альтернативе желаемый уровень разделения 106 выбран из одного из следующего: требуемый уровень 136 разделения, безопасный уровень 138 разделения и задаваемый уровень 140 разделения. В одном варианте, в котором конфигурация включает выработку некоторого количества компенсирующих команд 130, модуль 112 выполнен с возможностью выработки некоторого количества компенсирующих команд 130 с использованием некоторого количества параметров, выбираемых таким образом, что реакция первого транспортного средства на окончательное количество управляющих команд 143 представляет собой желаемую реакцию 145. В еще одном варианте желаемая реакция 145 включает по меньшей мере одно из следующего: желаемые ходовые качества, желаемый уровень удобства пассажиров, желаемый диапазон ускорения, желаемое время реакции и желаемая скорость поворота.
Таким образом, различные предпочтительные варианты реализации обеспечивают способ и устройство для управления разделения между транспортными средствами. В одном предпочтительном варианте реализации способ для управления разделения между транспортными средствами обеспечен. Ближайшая точка сближения между первым транспортным средством, движущимся вдоль первого пути, и вторым транспортным средством, движущимся вдоль второго пути, прогнозируют. Некоторое количество компенсирующих команд для изменения первого пути первого транспортного средства генерируют с использованием ближайшей точки сближения и желаемого уровня разделения между первым транспортным средством и вторым транспортным средством. Некоторое количество компенсирующих команд интегрируют с некоторым количеством управляющих команд для первого транспортного средства для формирования окончательного количества управляющих команд, сформированных для маневрирования первого транспортного средства для по существу поддержания желаемого уровня разделения между первым транспортным средством и вторым транспортным средством. Реакция первого транспортного средства на окончательное количество управляющих команд представляет собой желаемую реакцию.
Варианты реализации систем и способов согласно настоящему раскрытию могут обеспечивать значительные преимущества перед уровнем техники. Системы предотвращения столкновений с центром в транспортном средстве согласно различным вариантам реализации могут выгодно изменять пути полета по меньшей мере одного воздушного судна, когда их прогнозируемая ближайшая точка сближения (БТС) ожидается нарушить предварительно определенный периметр разделения. Таким образом, предотвращение столкновений может быть осуществлено без человеческого вмешательства. Автоматическое предотвращение столкновений может уменьшать или устранять вероятность человеческой ошибки или ненадлежащего выполнения маневров предотвращения столкновений. Кроме того, системы предотвращения столкновений с центром в транспортном средстве согласно различным вариантам реализации могут уменьшать необходимость в наземных диспетчерах управления воздушным движением для руководства разделением воздушных судов. Такие сокращения трудоемкости делают возможным для диспетчера управления воздушным движением управлять большим количеством воздушных судов, чем было возможно раньше. И, наконец, система предотвращения столкновений с центром в транспортном средстве может также быть воплощена на беспилотном воздушном судне для обеспечения лучшего управления и лучших рабочих качеств.
Описание различных предпочтительных вариантов реализации было представлено в целях иллюстрации и описания и не должно считаться исчерпывающим или ограниченным вариантами реализации в описанной форме. Много модификаций и вариаций должно быть понятно специалистам, обладающим средним уровнем знаний в данной области. Кроме того, разные предпочтительные варианты реализации могут обеспечивать разные преимущества по сравнению с другими предпочтительными вариантами реализации. Выбранный вариант реализации или выбранные варианты реализации выбраны и описаны с целью наилучшего объяснения принципов вариантов реализации, практического применения и для обеспечения возможности для специалистов, обладающих средним уровнем знаний в данной области, понять раскрытие для различных вариантов реализации с различными модификациями, которые подходят для конкретного рассматриваемого применения.
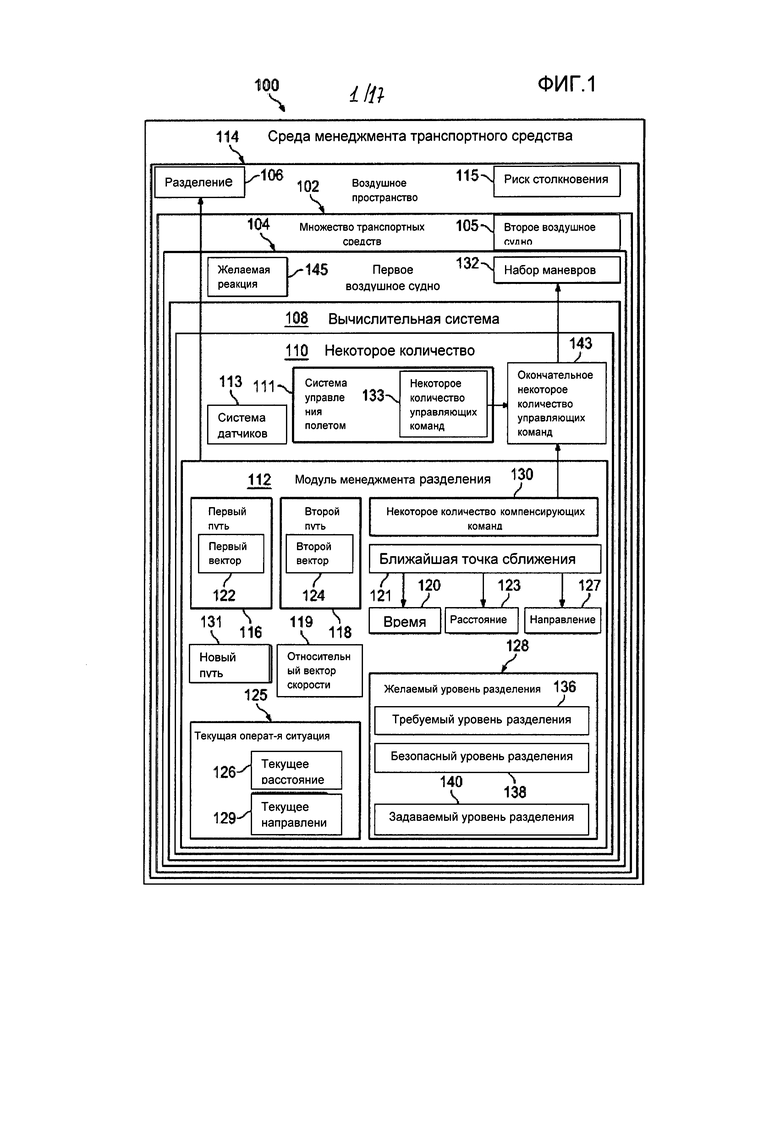


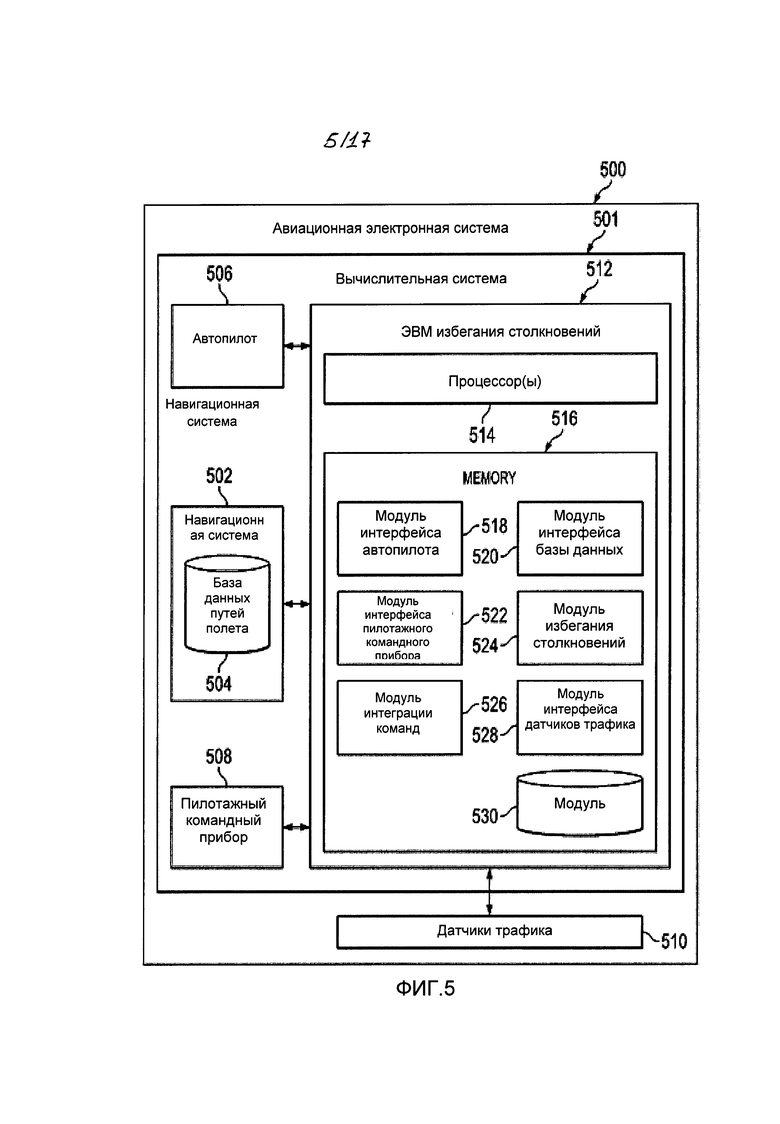

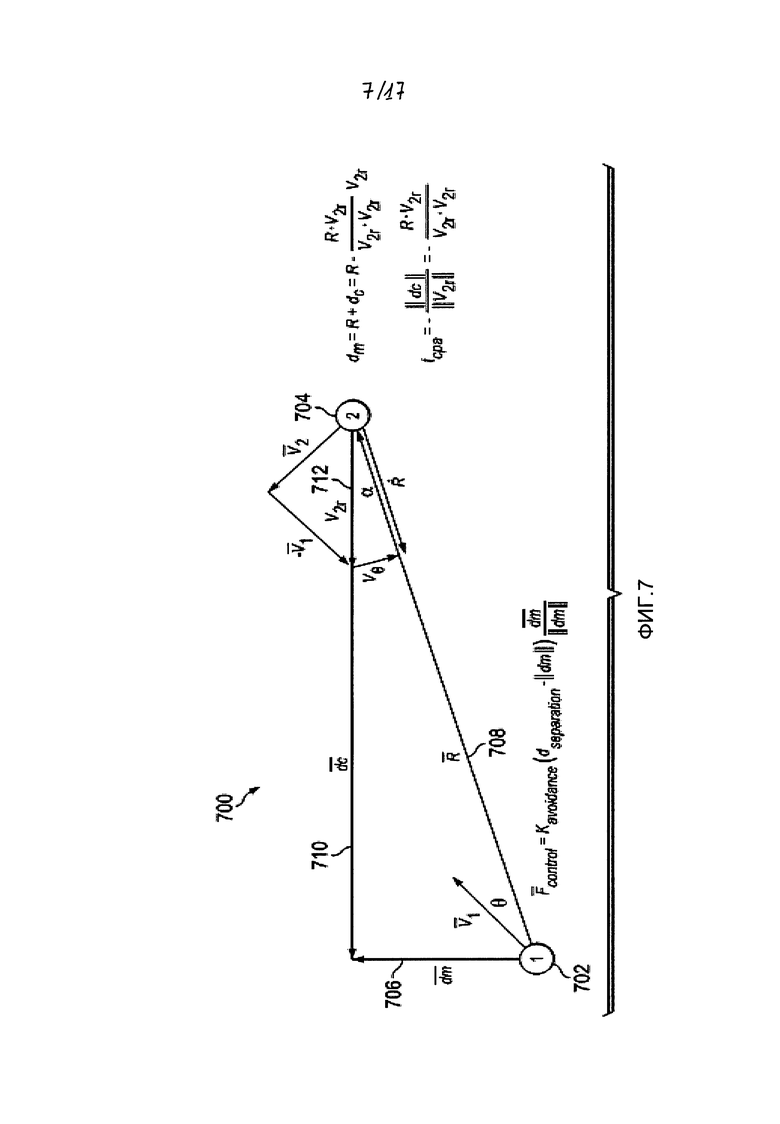





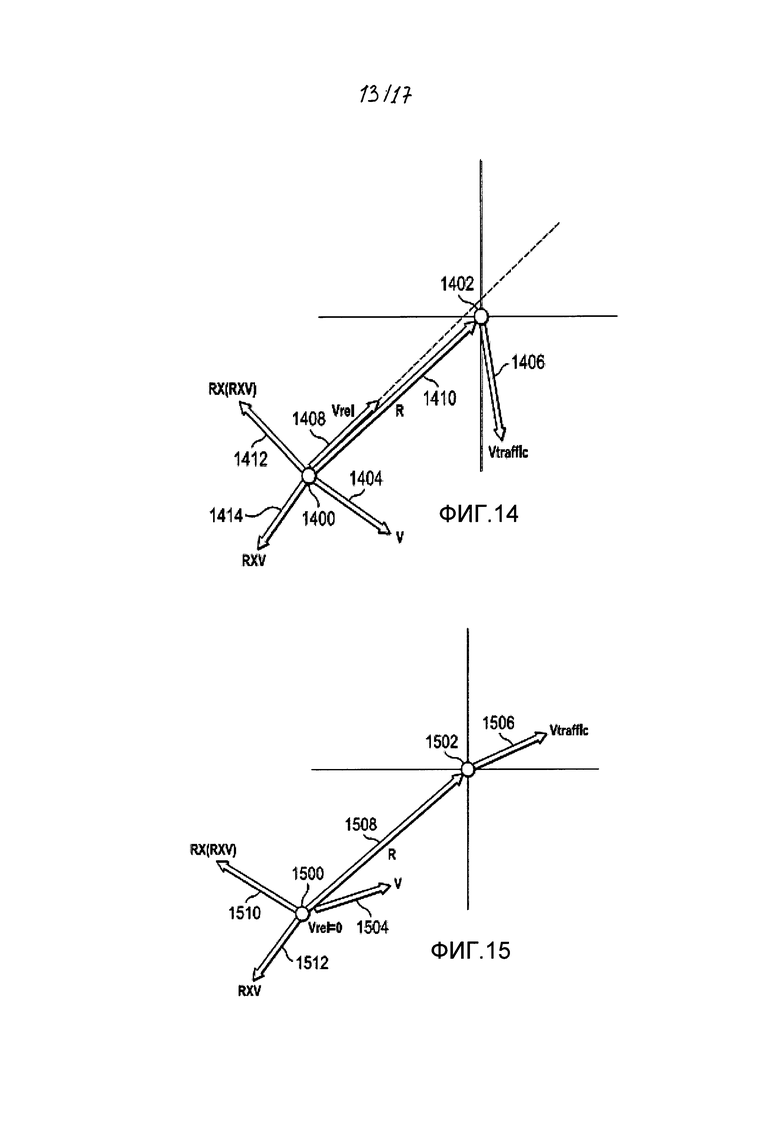
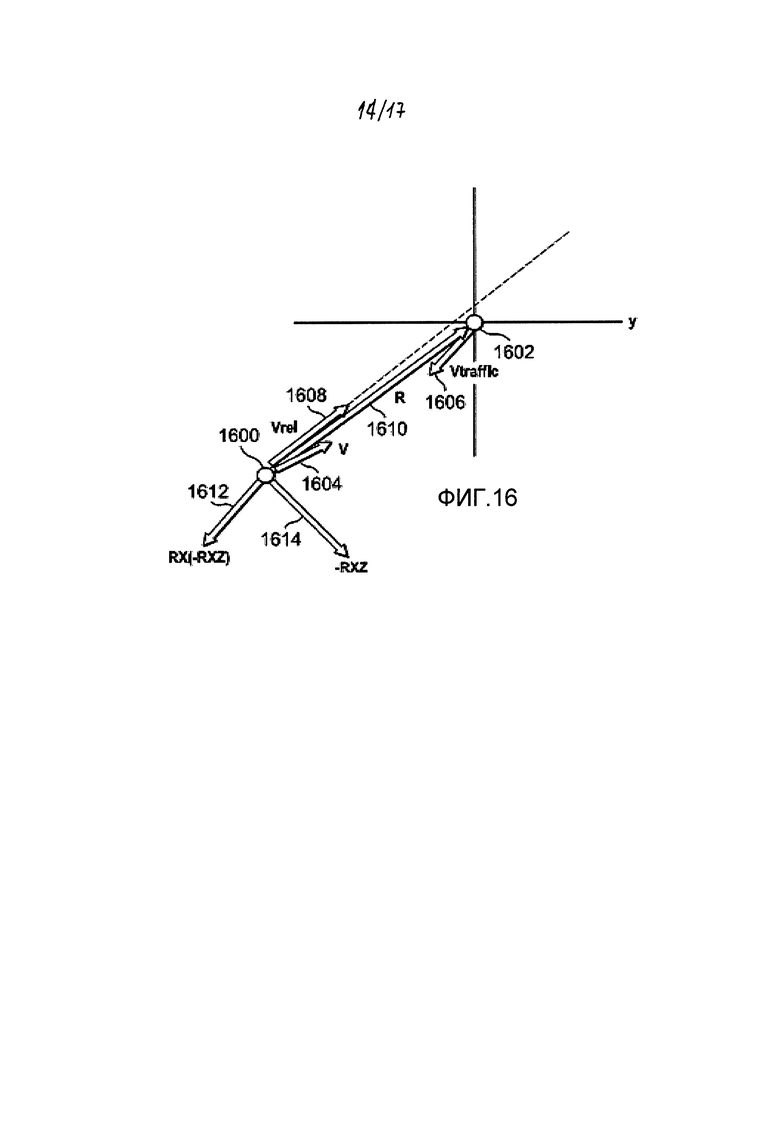
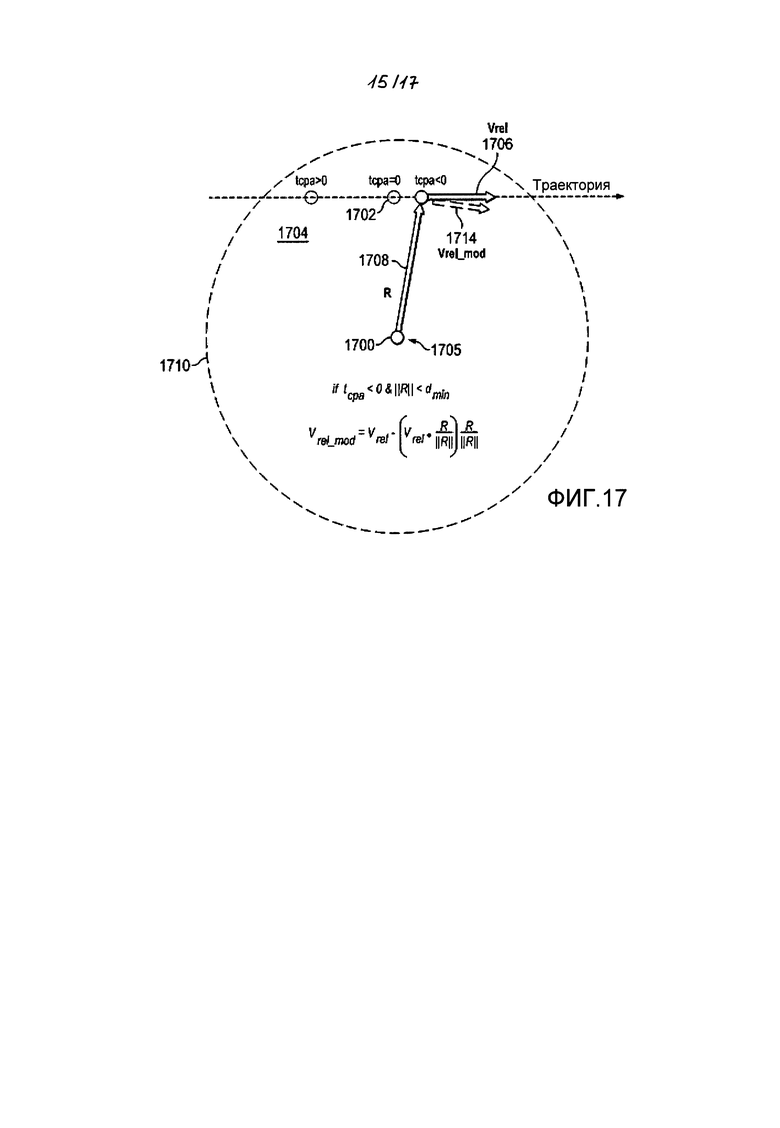



Группа изобретений относится к способу и системе для регулирования движения воздушных судов. Для регулирования разделения между транспортными средствами прогнозируют ближайшую точку сближения траекторий двух транспортных средств, вырабатывают компенсирующие команды для первого транспортного средства с требуемым уровнем разделения и времени сближения, формируют управляющие команды с учетом компенсирующих команд и требуемого уровня разделения. Система регулирования разделения содержит модуль для регулирования разделения. Обеспечивается предотвращение столкновения транспортных средств. 2 н. и 18 з.п. ф-лы, 20 ил.
1. Способ регулирования разделения (106) между транспортными средствами (102), включающий
прогнозирование ближайшей точки (121) сближения между первым транспортным средством, движущимся вдоль первого пути (116), и вторым транспортным средством, движущимся вдоль второго пути (118);
выработку некоторого количества компенсирующих команд (130) для изменения первого пути (116) первого транспортного средства с использованием ближайшей точки (121) сближения и требуемого уровня разделения (106) между первым транспортным средством и вторым транспортным средством и
интеграцию указанного количества компенсирующих команд (130) с некоторым количеством управляющих команд (133) для первого транспортного средства с целью формирования окончательного количества управляющих команд (143), сформированных для маневрирования первого транспортного средства, по существу, для поддержания требуемого уровня разделения (106) между первым транспортным средством и вторым транспортным средством,
причем реакция первого транспортного средства на указанное окончательное количество управляющих команд (143) представляет собой требуемую реакцию (145).
2. Способ по п. 1, дополнительно включающий
прогнозирование времени (120) до ближайшей точки (121) сближения, которая возникает, когда расстояние (123) между первым транспортным средством и вторым транспортным средством имеет минимальное значение, если первое транспортное средство продолжает движение вдоль первого пути (116), а второе транспортное средство продолжает движение вдоль второго пути (118).
3. Способ по п. 2, в котором этап прогнозирования ближайшей точки (121) сближения включает
прогнозирование расстояния (123) между первым транспортным средством и вторым транспортным средством, когда расстояние (123) имеет минимальное значение, если первое транспортное средство продолжает движение вдоль первого пути (116), а второе транспортное средство продолжает движение вдоль второго пути (118); и
прогнозирование направления (127) второго транспортного средства по отношению к первому транспортному средству, когда это расстояние имеет минимальное значение.
4. Способ по любому из пп. 2, 3, в котором этап выработки указанного количества компенсирующих команд (130) включает
выработку указанного количества компенсирующих команд (130) для изменения первого пути (116) первого транспортного средства с использованием ближайшей точки (121) сближения, требуемого уровня разделения (106) между первым транспортным средством и вторым транспортным средством и времени (120) до ближайшей точки (121) сближения.
5. Способ по п. 1, в котором первое транспортное средство представляет собой первое воздушное судно (104), второе транспортное средство представляет собой второе воздушное судно (105), указанное количество управляющих команд (133) генерируют с использованием модуля (602) управления полетами в первом воздушном судне (104), дополнительно включающий
приложение первого набора функций предельных значений к указанному количеству управляющих команд (133) и
приложение второго набора функций предельных значений к указанному количеству компенсирующих команд (130),
причем первый набор функций предельных значений и второй набор функций предельных значений сформированы для уменьшения вероятности полета первого воздушного судна (104) нежелательным образом.
6. Способ по п. 1, дополнительно включающий
выбор некоторого количества параметров для выработки указанного количества компенсирующих команд (130), причем указанное количество параметров выбирают таким образом, что реакция первого транспортного средства на окончательное количество управляющих команд (143) представляет собой требуемую реакцию.
7. Способ по п. 1, в котором требуемый уровень разделения (106) выбирают как одно из следующего: требуемый уровень (136) разделения, безопасный уровень (138) разделения и задаваемый уровень (140) разделения.
8. Способ по п. 1, в котором первое транспортное средство представляет собой первое воздушное судно (104), второе транспортное средство представляет собой второе воздушное судно (105), первый путь (116) представляет собой первый путь полета, а второй путь представляет собой второй путь полета, дополнительно включающий
маневрирование первого воздушного судна (104) для изменения первого пути полета первого воздушного судна (104) для формирования измененного пути (314) полета для первого воздушного судна (104) в ответ на указанное окончательное количество управляющих команд (143),
причем измененный путь (314) полета обеспечивает требуемый уровень разделения (106) в ближайшей точке (121) сближения между первым воздушным судном (104) и вторым воздушным судном (105).
9. Способ по п. 8, в котором этап маневрирования включает
изменение по меньшей мере одного из следующего: скорость, ускорение и направление (127) движения для первого воздушного судна (104) для формирования измененного пути (314) полета в ответ на указанное окончательное количество управляющих команд (143),
причем измененный путь (314) полета обеспечивает требуемый уровень разделения (106) в ближайшей точке (121) сближения между первым воздушным судном (104) и вторым воздушным судном (105).
10. Способ по п. 1, в котором требуемая реакция (145) включает по меньшей мере одно из следующего: требуемые ходовые качества, требуемый уровень удобства пассажиров, требуемый диапазон ускорения, требуемое время реакции и требуемая скорость поворота.
11. Способ по п. 1, в котором этап выработки указанного количества компенсирующих команд (130) включает
установление требуемого уровня разделения между первым транспортным средством и вторым транспортным средством с использованием неопределенности в прогнозировании ближайшей точки сближения.
12. Способ по любому из пп. 1-3, 6, 7 и 10, 11, в котором первое транспортное средство и второе транспортное средство выбраны по меньшей мере как одно из следующего: воздушное судно, беспилотный летательный аппарат, вертолет, подводная лодка, надводное судно, ракета, космический летательный аппарат и наземное транспортное средство.
13. Система для регулирования разделения между транспортными средствами, содержащая модуль (112) для регулирования разделения, выполненный с возможностью
прогнозирования ближайшей точки (121) сближения между первым транспортным средством, движущимся вдоль первого пути (116), и вторым транспортным средством, движущимся вдоль второго пути (118), с использованием первого пути (116) и второго пути (118);
выработки некоторого количества компенсирующих команд (130) для изменения первого пути (116) первого транспортного средства с использованием ближайшей точки (121) сближения и требуемого уровня разделения (106) между первым транспортным средством и вторым транспортным средством и
интеграции указанного количества компенсирующих команд (130) с некоторым количеством управляющих команд (133) для первого транспортного средства с целью формирования окончательного количества управляющих команд (143), сформированных для маневрирования первого транспортного средства, по существу, для поддержания требуемого уровня разделения (106) между первым транспортным средством и вторым транспортным средством,
причем реакция первого транспортного средства на указанное окончательное количество управляющих команд (143) представляет собой требуемую реакцию (145).
14. Система по п. 13, в которой модуль (112) для регулирования разделения дополнительно выполнен с возможностью прогнозирования времени (120) до ближайшей точки (121) сближения, которая возникает, когда расстояние (123) между первым транспортным средством и вторым транспортным средством имеет минимальное значение, если первое транспортное средство продолжает движение вдоль первого пути (116), а второе транспортное средство продолжает движение вдоль второго пути (118).
15. Система по п. 14, в которой, в режиме прогнозирования ближайшей точки (121) сближения, модуль (112) для регулирования разделения выполнен с возможностью прогнозирования расстояния (123) между первым транспортным средством и вторым транспортным средством, когда это расстояние имеет минимальное значение по мере перемещения первого транспортного средства вдоль первого пути (116), а второго транспортного средства вдоль второго пути (118), и прогнозирования направления (127) второго транспортного средства по отношению к первому транспортному средству, когда это расстояние (123) имеет минимальное значение.
16. Система по п. 14, в которой, в режиме выработки указанного количества компенсирующих команд, модуль для регулирования разделения выполнен с возможностью выработки указанного количества компенсирующих команд для изменения первого пути первого транспортного средства с использованием ближайшей точки сближения, требуемого уровня разделения между первым транспортным средством и вторым транспортным средством и времени до ближайшей точки сближения.
17. Система по п. 13, в которой первое транспортное средство представляет собой первое воздушное судно, второе транспортное средство представляет собой второе воздушное судно, дополнительно содержащая:
модуль управления полетами, причем модуль управления полетами выполнен с возможностью выработки указанного количества управляющих команд и приложения первого набора функций предельных значений к указанному количеству управляющих команд, а модуль для регулирования разделения выполнен с возможностью приложения второго набора функций предельных значений к указанному количеству компенсирующих команд,
причем первый набор функций предельных значений и второй набор функций предельных значений сформированы для уменьшения вероятности полета первого воздушного судна нежелательным образом.
18. Система по п. 13, в которой требуемый уровень разделения выбран как одно из следующего: требуемый уровень разделения, безопасный уровень разделения и задаваемый уровень разделения.
19. Система по п. 13, в которой, в режиме выработки указанного количества компенсирующих команд, модуль для регулирования разделения выполнен с возможностью выработки указанного количества компенсирующих команд с использованием некоторого количества параметров, выбранных таким образом, что реакция первого транспортного средства на указанное окончательное количество управляющих команд представляет собой требуемую реакцию.
20. Система по п. 19, в которой требуемая реакция содержит по меньшей мере одно из следующего: требуемые ходовые качества, требуемый уровень удобства пассажиров, требуемый диапазон ускорения, требуемое время реакции и требуемая скорость поворота.
| EP 1936584 B1, 10.03.2010 | |||
| WO 2001046933 A1, 28.06.2001 | |||
| US 20040090117 A1, 13.05.2004 | |||
| US 7516014 B2, 07.04.2009 | |||
| СИСТЕМА И СПОСОБ ДЛЯ РАСПОЗНАВАНИЯ МАНЕВРОВ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА В КОНФЛИКТНЫХ СИТУАЦИЯХ | 2007 |
|
RU2461889C2 |

