ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области информационно-измерительной техники, а именно к автоматизированным системам управления и контроля. Способ относится к системам управления и контроля пилотируемыми и беспилотными авиационными системами для обеспечения безопасности их полета в общем воздушном пространстве, но может быть применен и на других транспортных средствах.
УРОВЕНЬ ТЕХНИКИ
В настоящее время широкое распространение получают различные системы и способы доставки товаров и грузов с помощью БАС (беспилотные авиационные системы).
Известна система навигации БАС, описанная в патенте США №8626361, опубликованном 25.11.2008. В известной системе первый БАС содержит данные, представляющие собой маршрут полета первого БАС и наземную станцию. Наземная станция принимает данные с БАС, представляющие собой, маршрут полета первого БАС, рассчитывает маршрут полета для второго БАС, таким образом, чтобы траектории полета первого БАС и второго БАС не пересекались, и передает рассчитанный маршрут полета на второй БАС.
Известна система учета положения БАС, описанная в патенте США №8386175, опубликованном 18.03.2010. Известная система включает в себя систему отчетности управления воздушным движением (УВД) в сочетании с наземной станции управления (НСУ), УВД включает в себя систему автоматической трансляции наблюдения за БАС и информации о трафике услуг вещания, приемопередатчик и один или более телекоммуникационных модемов. НСУ выполнена с возможностью приема данных о позиции БАС в воздушном пространстве и сообщает позицию БАС в воздушном пространстве оператору УВД или в коммуникационный центр через приемопередатчик. УВД также может быть выполнен с возможностью отображения положения БАС в воздушном пространстве, на одном или более экранах.
Известна система управления БЛА, описанная в патенте США №8521339, опубликованном 08.04.2010. В известной системе организована удаленная связь между БАС и базовой станцией. БАС передает на базовую станцию свои координаты с привязкой к карте, базовая станция определяет вектора скорости для БАС и направляет БАС в соответствии с определенным вектором скорости до тех пор, пока БАС не достигнет цели.
Известна система безопасности полетов БАС в гражданском воздушном пространстве, описанная в патенте США №8838289, опубликованном 07.02.2008. Известная система включает в себя: наземную станция оснащенную системой технического зрения; БАС; удаленный оператор, управляющий наземной станцией; канал связи между БАС и наземной станцией; систему на борту БАС для обнаружения присутствия и положение вблизи воздушных судов и передачи этой информации удаленному оператору;
Из предшествующего уровня техники известен способ управления беспилотным летательным аппаратом и устройство для его реализации (см. патент RU №2390815, опубл. 27.05.2010 г.), характеризующий управление одним или несколькими беспилотными летательными аппаратами, каждый из которых оборудован бортовой автоматической системой управления, спутниковой навигационной системой, высокоточными синхронизированными часами, а также бортовым вычислителем и приемо-передающей радиостанцией, с помощью которой осуществляется цифровая радиосвязь с базовой радиостанцией, со стационарным или подвижным пунктом управления, который оборудован автоматизированным рабочим местом оператора, при этом передача команд управления движением беспилотного летательного аппарата, передача данных о координатах и параметрах его движения, а также передача идентификационных номеров и данных о координатах и параметрах движения других подвижных объектов, оборудованных приемопередающими радиостанциями и находящихся в пределах радиовидимости, производится в один или несколько общих радиоканалов, причем трансляция сообщений каждой передающей радиостанцией производится в заранее заданный отрезок дискретной шкалы единого времени с временным упреждением, которого достаточно для компенсации запаздывания в получении и исполнении указанных команд.
Недостатком известных способов управления беспилотным летательным аппаратом является то, что управление и контроль БВС осуществляется внешним пилотом с наземного пункта управления в пределах радиовидимости, что затрудняет поддержание безотказного состояния оборудования БВС при эксплуатации, а также осуществление контроля за выполнением санкционированного трафика полета БВС, а это снижает уровень безопасности полетов, а по существу делает невозможным обеспечение интеграции беспилотных авиационных систем в общее воздушное пространство.
Существующие правила управления воздушным движением (УВД) сформировались, когда масштабы БАС, по существу, ограничивались авиамодельным спортом.
Воздушное пространство пронизано специальными путями, которые переходят из одной контролируемой зоны в другую. Точное число летательных аппаратов сказать довольно сложно, поскольку оно измеряется уже тысячами самолетов, число которых из года в год только растет.
Можно представить, что будет в воздушном пространстве, когда число увеличится на порядки. И здесь без автоматизированного управления эксплуатацией беспилотного воздушного судна при полетах в общем воздушном пространстве не обойтись, причем автоматически должен формироваться и контролироваться не только трафик полета, но также остаточный ресурс и предотказное состояние на всех этапах жизненного цикла, а также выявление случаев несанкционированного изменения трафика полета БВС, а это означает, что без принципов искусственного интеллекта обойтись просто невозможно, основой которых являются автоматизированные программные комплексы.
Мировое сообщество безуспешно пытается решить проблему осуществления контроля при совместных полетах пилотируемой и беспилотной авиации в общем воздушном пространстве. Поскольку предложений, как решить эту проблему, не было, то ИКАО в 2011 г. в циркуляре 328 временно были сформулированы и изложены принципы интеграции беспилотников в общее воздушное пространство (беспилотники могут летать только в сегрегированном пространстве без осуществления контроля). А когда появятся новые технологии, то можно будет думать о контролируемых совместных полетах пилотируемой и беспилотной авиации (по оценкам после 2035 г. ).
Такой принцип полетов беспилотников был разработан на западе и получил название UTM (UAS Traffic Management - управление трафиком беспилотных воздушных систем). UTM - это экосистема «организации движения» для неконтролируемых операций, которая отделена от системы управления воздушным движением, но дополняет ее. По сути UTM, это набор справочно-информационных сервисов, доставляющих пользователям информацию о планах полета, но не о фактически достоверном положении воздушных судов. Причем, как говорят сами авторы (FAA) UTM - это система организации только беспилотных операций. А по существу - это идеальный инструментов для террористов.
Системы, использующие принцип UTM, появились во многих странах. В Европе это «SESAR». В США это «FAA». В России это «UTM - БАС».
Понимая стратегические цели проблемы, по указанию Трампа в 2017 году начата разработка Пилотных проектов (до пяти) с целью обеспечения мирового господства в этой важной отрасли, а также получения стратегического преимущества для военных операций и коммерческой деятельности (рынок оценивается в 200-300 млрд. долларов), что позволит завоевать в будущем перспективный рынок, владея мировой системой управления беспилотными авиационными системами в едином воздушном пространстве (пока результатов нет). Совет безопасности РФ понимая важность проблемы обязал Минтранс разработать Концепцию интеграции беспилотников в общее воздушное пространство (срок первое сентября 2020 г.). Но «КОНЦЕПЦИЯ ИНТЕГРАЦИИ» - это процесс.Этим воспользовались в Минтрансе (ГосНИИ ГА) и разработали Концепцию процесса, то есть, временной горизонт процесса интеграции UTM, а не концепцию создания автоматизированной системы, обеспечивающей контроль и управление безопасными полетами пилотируемой и беспилотной авиации в общем воздушном пространстве.
Таким образом, проблема остается не решенной на мировом уровне уже десять лет, и до сих пор решения так и не предложено даже на концептуальном уровне.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Предлагаемое изобретение направлено на решение проблемы контроля и управления полетами пилотируемой и беспилотной авиации в общем воздушном пространстве. Задачей заявляемого способа организации воздушного движения с формированием принципов искусственного интеллекта, используя архитектуру единого информационного поля, для осуществления безопасных совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве - повысить уровень обеспечения безопасности полетов на всех участках их полета.
Технический результат от использования данного изобретения заключается в обеспечении безопасных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве.
Такой технический результат заявляемого способа обеспечивается за счет того, что формулируется структура (архитектура) единого информационного поля, и ее физическое наполнение, а также алгоритмы взаимодействия и использования (применения) этого наполнения, как первый шаг искусственного интеллекта, системы управления и контроля организации воздушного движения для осуществления безопасных совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве.
Способ организации воздушного движения с формированием принципов искусственного интеллекта для осуществления безопасных совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве, заключающийся в том, что для каждого регионального центра формируется единое информационное поле, использующее автоматизированные бортовой и наземный программные комплексы, причем автоматизированный бортовой программный комплекс включает - программный автоматизированной комплекс, реализующий логику архитектуры единого информационного поля, программный комплекс автоматизированной диагностики ответственных узлов БВС с оценкой их остаточного ресурса и предотказного состояния, программный комплекс автоматизированного определения своего местоположения и прогнозирование параметров полета с учетом уточненного текущего положения, программный комплекс автоматизированного формирования прогнозируемых параметров полета всех БВС, ограниченного окружающего БВС пространства, программный комплекс автоматизированного формирования общей карты окружающего пространства с прогнозируемыми параметрами полета всех БВС, для образования воздушной многопозиционной системы наблюдения этого пространства, программный комплекс автоматизированного формирования структуры и параметров образованной многопозиционной системы наблюдения санкционированных БВС, программный комплекс автоматизированного выявления несанкционированных БВС, в образованной наземно-воздушной многопозиционной системе наблюдения, программа диспетчер, объединяющая программные комплексы БВС, а автоматизированный наземный программный комплекс включает - программный комплекс автоматизированного формирования базы данных зарегистрированных БВС, с присвоением им регистрационного номера, для отражения на этапе всего жизненного цикла всех изменений технического состояния, включая этапы и режимы эксплуатации, этапы технического обслуживания и ремонта, а также отражены контрольные параметры с указанием допустимых отклонений и критериев, характеризующих предотказное состояние ответственных узлов БВС, программный комплекс автоматизированного формирования выдачи разрешений на полет БВС в зоне, соответствующей техническому состоянию БВС, которое обеспечивает безопасный полет в разрешенной зоне, программный комплекс автоматизированного формирования наземно-воздушной многопозиционной системой наблюдения, основанной на наземных ориентирах и информации, сформированной многопозиционной воздушной системы наблюдения с помощью БВС, программный комплекс автоматизированного формирования разрешенных зон полета по регионам, программный комплекс автоматизированного формирования разрешенных правил полета, программный комплекс автоматизированного выявления БВС при их отклонении от санкционированного полета и выдачи рекомендаций для пресечения такого полета, программный комплекс автоматизированного взаимодействия со службами ОрВД других регионов при полете БВС в двух и более регионах, программа диспетчер, объединяющая программные комплексы наземного центра контроля и управления, а программные комплексы БВС и наземного центра контроля и управления реализуются специальными алгоритмами, обеспечивая автоматизированной системе принципы искусственного интеллекта, при этом параметры технического состояния всех зарегистрированных пилотируемых и беспилотных авиационных систем сохраняются на этапе всего жизненного цикла для оценки остаточного ресурса БВС, текущие координаты всех БВС региона и планируемые трафики полета, сформированы с использованием глобальных спутниковых навигационных систем или других альтернативных способов, причем формирование единого информационного поля осуществляется в режиме онлайн, используя принцип ретрансляции и непрерывный обмен информацией между БВС и наземным центром контроля и управления над полетами пилотируемой и беспилотной авиации в общем воздушном пространстве, чтобы обеспечить идентичность информации у всех БВС и наземном автоматизированном комплексе, при этом, обладая достоверной информацией о техническом состоянии, планируемом трафике полета и реальным трафиком полета, за счет взаимного многопозиционного контроля самими БВС, позволяет выявить отклонение от санкционированного трафика полета и достаточности остаточного ресурса совершать дальнейший полет, а в случае невыполнения этих условий наземный автоматизированный комплекс формирует сигнал для принятия мер по прекращению несанкционированного полета, если же полет БВС запланирован через несколько регионов, то наземные автоматизированные комплексы этих региональных центров присоединяются к сформированному информационному полю с начала полета такого БВС, получив полную информацию о данном БВС, и осуществляют контроль и управление БВС, когда он находиться в зоне ответственности их регионального центра.
Это позволит эффективным путем решить проблему совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Это позволит эффективным путем решить проблемы информативности средств наблюдения за воздушной обстановкой, а также применение эффективных способов управления БАС.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
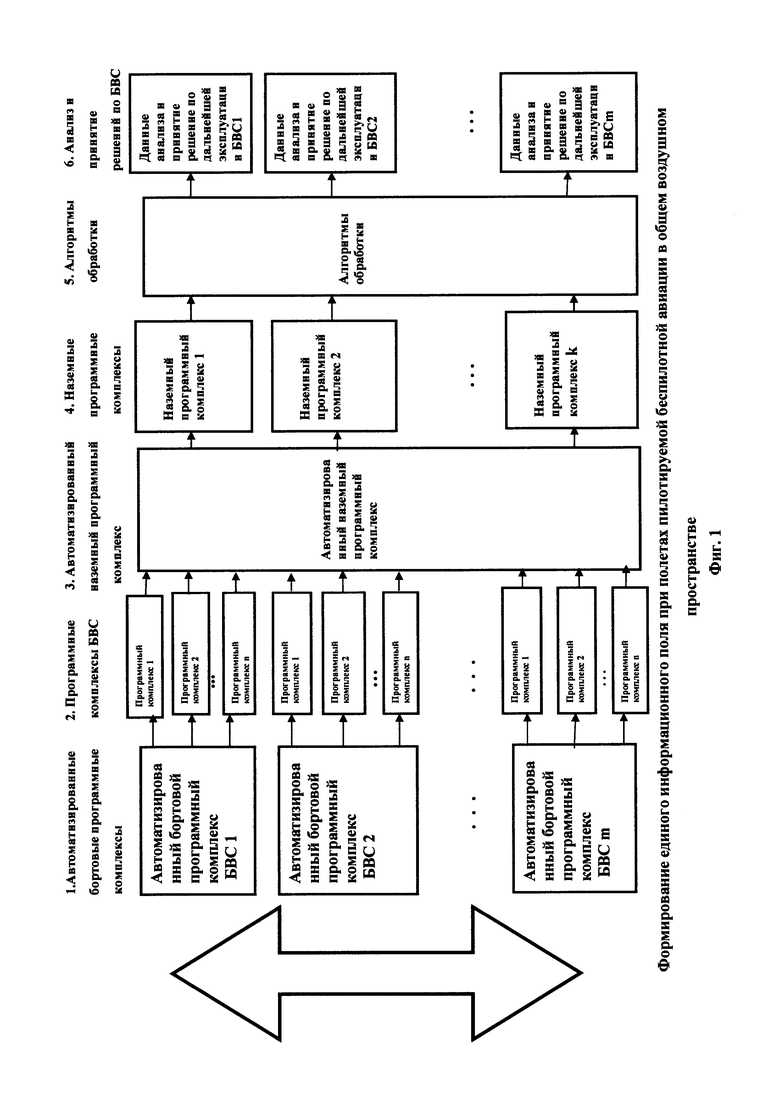
Фиг. 1. Формирование единого информационного поля при полетах пилотируемой беспилотной авиации в общем воздушном пространстве.
Заявленный способ поясняется рисунком, на котором показана схема формирования единой информационной при полетах пилотируемой беспилотной авиации в общем воздушном пространстве.
Задачей заявляемого способа организации воздушного движения с формированием принципов искусственного интеллекта, используя архитектуру единого информационного поля, для осуществления безопасных совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве - повысить уровень обеспечения безопасности полетов на всех участках их полета.
Автоматизированные бортовые программные комплексы (1,2,…,m) включают программные комплексы (1,2,…,n):
- программный комплекс, реализующий логику архитектуры единого информационного поля;
- программный комплекс автоматизированной диагностики ответственных узлов БВС с оценкой их остаточного ресурса и предотказного состояния;
- программный комплекс автоматизированного определения своего местоположения и прогнозирования параметров полета с учетом уточненного текущего положения;
- программный комплекс автоматизированного формирования прогнозируемых параметров полета всех БВС, ограниченного окружающего БВС пространства;
- программный комплекс автоматизированного формирования общей карты окружающего пространства с прогнозируемыми параметрами полета всех БВС, для образования воздушной многопозиционной системы наблюдения этого пространства;
- программный комплекс автоматизированного формирования структуры и параметров образованной многопозиционной системы наблюдения санкционированных БВС;
- программный комплекс автоматизированного выявления несанкционированных БВС, в образованной наземно-воздушной многопозиционной системе наблюдения;
- программа диспетчер, объединяющая программные комплексы БВС.
Автоматизированный наземный программный комплекс включает наземные программные комплексы (1,2,…,k):
- программный комплекс автоматизированного формирования базы данных зарегистрированных БВС, с присвоением им регистрационного номера, для отражения на этапе всего жизненного цикла всех изменений технического состояния, включая этапы и режимы эксплуатации, этапы технического обслуживания и ремонта, а также отражены контрольные параметры с указанием допустимых отклонений и критериев, характеризующих предотказное состояние ответственных узлов БВС;
- программный комплекс автоматизированного формирования выдачи разрешений на полет БВС в зоне, соответствующей техническому состоянию БВС, которое обеспечивает безопасный полет в разрешенной зоне;
- программный комплекс автоматизированного формирования наземно-воздушной многопозиционной системой наблюдения, основанной на наземных ориентирах и информации, сформированной многопозиционной воздушной системой наблюдения с помощью БВС;
- программный комплекс автоматизированного формирования разрешенных зон полета по регионам;
- программный комплекс автоматизированного формирования разрешенных правил полета;
- программный комплекс автоматизированного выявления БВС при их отклонении от санкционированного полета и выдачи рекомендаций для пресечения такого полета;
- программный комплекс автоматизированного взаимодействия со службами ОрВД других регионов при полете БВС в двух и более регионах;
- программа диспетчер, объединяющая программные комплексы наземного центра контроля и управления.
Программные комплексы БВС и наземного центра контроля и управления реализуются специальными алгоритмами, обеспечивая автоматизированной системе принципы искусственного интеллекта,
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение относится к области информационно-измерительной техники, а именно к автоматизированным системам управления и контроля. Способ относится к пилотируемым и беспилотным авиационным системам для обеспечения безопасности их полета в общем воздушном пространстве, но может быть применен и на других транспортных средствах.
Данное изобретение направлено на устранение недостатков, присущих существующим аналогам. Задачей заявляемого способа осуществление контроля и управления над полетами пилотируемых и беспилотных авиационных систем в общем воздушном пространстве с использованием принципов искусственного интеллекта, что повысит уровень обеспечения безопасности полетов на всех участках их полета.
Технический результат от использования данного изобретения заключается в обеспечении безопасных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве.
Такой технический результат заявляемого способа обеспечивается за счет того, что для организации воздушного движения используются принципы искусственного интеллекта для осуществления безопасных совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве, заключающийся в том, что для каждого регионального центра формируется единое информационное поле, использующее автоматизированные бортовой и наземный программные комплексы, осуществляющие управление и контроль пилотируемыми и беспилотными авиационными системами для обеспечения безопасности их полета в общем воздушном пространстве.
Заявленный способ поясняется схемой, на которой показано осуществление формирования единого информационного поля, за счет автоматизированных бортовых и наземного регионального программных комплексов, для контроля и управления летательными аппаратами, при полетах пилотируемой беспилотной авиации в общем воздушном пространстве.
Для осуществления полетов БАС необходимо зарегистрировать в базе данных с присвоением регистрационного номера и последующими изменениями, отражающими техническое состояние БАС в процессе всего жизненного цикла, как при техническом обслуживании и ремонте, так и в процессе полета. Эта информация используется для осуществления контроля за полетом БАС, с целью обеспечения безопасного полета.
Для выполнения конкретного полета, с использованием зарегистрированного БВС, подается заявка, которая анализируется на предмет возможности ее выполнения, корректируется при необходимости и выдается разрешение на выполнение согласованного полета в заданном воздушном пространстве.
Каждый зарегистрированный БАС должен иметь лицензионный информационный блок, который не допускает несанкционированного вскрытия и перенастройки, включающий следующую базовую комплектацию - блок навигации БАС, блок передачи данных БАС, блок приема данных БАС, блок формирования команд управления БАС, блок ретрансляции БАС (допускается упрощенная комплектация).
Региональный центр контроля за полетом БАС принимает информацию, характеризующую текущее техническое состояние и трафик полета БАС, происходит сравнение с согласованными параметрами полета, выявляет отклонения от санкционированного и по результатам анализа принимается решение. Причем такой контроль осуществляется над всеми БАС, которые находятся в зоне контроля данного регионального центра, используя либо линии передачи информации непосредственно с БАС, либо за счет ретрансляции через другие БАС.
Дополнительно, осуществляется вычисление по доплеровским измерениям текущих параметров трафика полета других БАС, которые ретранслируются по каналам связи наземным службам управления воздушным движением.
В случае перехода БАС из одного регионального центра в другой в соответствие с запланированным санкционированным трафиком полета, то дальнейший контроль переходит к этому центру.
В случае отсутствия прямой радиовидимости информация ретранслируется через другие БАС наземным службам управления воздушным движением. Пакет информации для ретрансляции дополняется пакетами с информацией, поступившей для ретрансляции с других БАС, и направляется наземным службам управления воздушным движением (ретрансляция может осуществляться через спутниковые каналы связи).
В случае отклонения от санкционированного трафика полета служба управления воздушным движением подает команды на возвращение к санкционированному трафику полета и автоматически эта информация поступает в службу пресечения несанкционированного полета беспилотного воздушного судна.
В случае возвращения БВС к санкционированному трафику полета продолжается штатный режим работы службы управления воздушным движением, а если принятые меры не дали положительного результата, то служба пресечения несанкционированного полета беспилотного воздушного судна принимает меры по пресечению такого полета, используя информацию о характеристиках БВС, времени и месте начала несанкционированного полета.
Поставленная цель достигается тем, что в известном способе организации воздушного движения с формированием принципов искусственного интеллекта для осуществления безопасных совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве, заключающийся в том, что для каждого регионального центра формируется единое информационное поле, использующее автоматизированные бортовой и наземный программные комплексы, причем автоматизированный бортовой программный комплекс включает - программный автоматизированной комплекс, реализующий логику архитектуры единого информационного поля, программный комплекс автоматизированной диагностики ответственных узлов БВС с оценкой их остаточного ресурса и предотказного состояния, программный комплекс автоматизированного определения своего местоположения и прогнозирования параметров полета с учетом уточненного текущего положения, программный комплекс автоматизированного формирования прогнозируемых параметров полета всех БВС, ограниченного окружающего БВС пространства, программный комплекс автоматизированного формирования общей карты окружающего пространства с прогнозируемыми параметрами полета всех БВС, для образования воздушной многопозиционной системы наблюдения этого пространства, программный комплекс автоматизированного формирования структуры и параметров образованной многопозиционной системы наблюдения санкционированных БВС, программный комплекс автоматизированного выявления несанкционированных полетов БВС, в образованной наземно-воздушной многопозиционной системе наблюдения, программа диспетчер, объединяющая программные комплексы БВС, а автоматизированный наземный программный комплекс включает - программный комплекс автоматизированного формирования базы данных зарегистрированных БВС, с присвоением им регистрационного номера, для отражения на этапе всего жизненного цикла всех изменений технического состояния, включая этапы и режимы эксплуатации, этапы технического обслуживания и ремонта, а также отражены контрольные параметры с указанием допустимых отклонений и критериев, характеризующих предотказное состояние ответственных узлов БВС, программный комплекс автоматизированного формирования выдачи разрешений на полет БВС в зоне, соответствующей техническому состоянию БВС, которое обеспечивает безопасный полет в разрешенной зоне, программный комплекс автоматизированного формирования наземно-воздушной многопозиционной системой наблюдения, основанной на наземных ориентирах и информации, сформированной многопозиционной воздушной системы наблюдения с помощью БВС, программный комплекс автоматизированного формирования разрешенных зон полета по регионам, программный комплекс автоматизированного формирования разрешенных правил полета, программный комплекс автоматизированного выявления БВС при их отклонении от санкционированного полета и выдачи рекомендаций для пресечения такого полета, программный комплекс автоматизированного взаимодействия со службами ОрВД других регионов при полете БВС в двух и более регионах, программа диспетчер, объединяющая программные комплексы наземного центра контроля и управления, а программные комплексы БВС и наземного центра контроля и управления реализуются специальными алгоритмами, обеспечивая автоматизированной системе принципы искусственного интеллекта, при этом параметры технического состояния всех зарегистрированных пилотируемых и беспилотных авиационных систем сохраняются на этапе всего жизненного цикла для оценки остаточного ресурса БВС, текущие координаты всех БВС региона и планируемые трафики полета, сформированы с использованием глобальных спутниковых навигационных систем или других альтернативных способов, причем формирование единого информационного поля осуществляется в режиме онлайн, используя принцип ретрансляции и непрерывный обмен информацией между БВС и наземным центром контроля и управления над полетами пилотируемой и беспилотной авиации в общем воздушном пространстве, чтобы обеспечить идентичность информации у всех БВС и наземном автоматизированном комплексе, при этом, обладая достоверной информацией о техническом состоянии, планируемом трафике полета и реальным трафиком полета, за счет взаимного многопозиционного контроля самими БВС, выявляется отклонение от санкционированного трафика полета, а также достаточность остаточного ресурса совершать дальнейший полет, а в случае невыполнения этих условий наземный автоматизированный комплекс формирует сигнал для принятия мер по прекращению несанкционированного полета, если же полет БВС запланирован через несколько регионов, то наземные автоматизированные комплексы этих региональных центров присоединяются к сформированному информационному полю с начала полета такого БВС, получив полную информацию о данном БВС, и осуществляют контроль и управление БВС, когда он находиться в зоне ответственности их регионального центра.
Это позволит эффективным путем решить проблемы информативности средств наблюдения за воздушной обстановкой, а также применение эффективных способов управления БАС.
Изобретение относится к способу организации воздушного движения совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве. Для организации воздушного движения для каждого регионального центра формируют единое информационное поле, использующее автоматизированные бортовой и наземный программные комплексы, осуществляющие управление и контроль пилотируемыми и беспилотными авиационными системами (БАС). Для осуществления полетов БАС их регистрируют в базе данных с присвоением регистрационного номера, фиксируют их техническое состояние, подают заявку для выполнения конкретного полета. В каждом из региональных центров контроля, в зоне ответственности которого производится полет БАС, принимают информацию, характеризующую текущее техническое состояние и трафик полета БАС, сравнивают ее с согласованными параметрами полета, выявляют отклонения от санкционированного полета и по результатам анализа принимают решение о продолжении полета или его прекращении. Обеспечивается повышение безопасности полетов пилотируемой и беспилотной авиации в общем воздушном пространстве. 1 ил.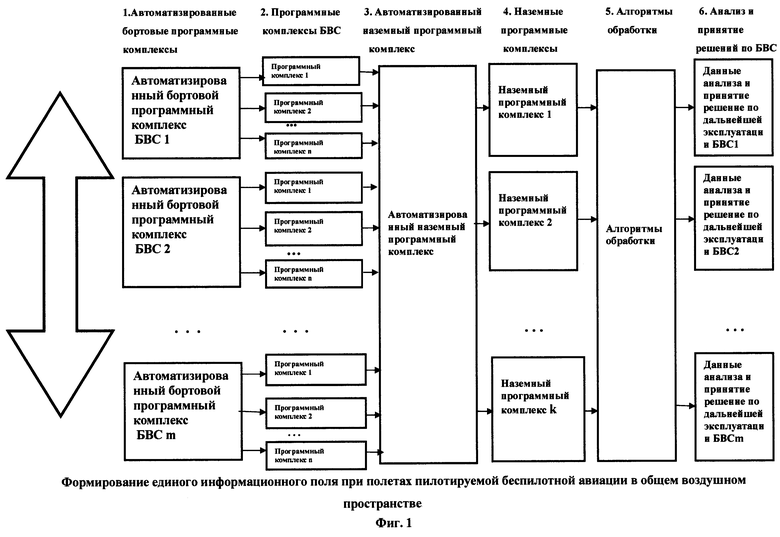
Способ организации воздушного движения совместных полетов пилотируемой и беспилотной авиации в общем воздушном пространстве, заключающийся в том, что создают региональные центры контроля полетов пилотируемых и беспилотных авиационных систем (БАС) в общем воздушном пространстве, региональный центр и каждую БАС оснащают соответственно наземным и бортовым автоматизированными программными комплексами, которые реализуют логику и архитектуру единого информационного поля, причем автоматизированный бортовой программный комплекс включает программный комплекс автоматизированной диагностики ответственных узлов БАС с оценкой их остаточного ресурса и предотказного состояния, программный комплекс автоматизированного определения своего местоположения и прогнозирования параметров полета с учетом уточненного текущего положения, программный комплекс автоматизированного формирования прогнозируемых параметров полета всех БАС, программный комплекс автоматизированного формирования общей карты окружающего пространства с прогнозируемыми параметрами полета всех БАС, программный комплекс автоматизированного формирования структуры и параметров многопозиционной системы наблюдения санкционированных БАС, программный комплекс автоматизированного выявления несанкционированных полетов БАС, программу диспетчер, объединяющую программные комплексы БАС, а автоматизированный наземный программный комплекс включает программный комплекс автоматизированного формирования базы данных зарегистрированных БАС, с присвоением им регистрационного номера, для отражения на этапе всего жизненного цикла всех изменений технического состояния, включая этапы и режимы эксплуатации, этапы технического обслуживания и ремонта, а также отражены контрольные параметры с указанием допустимых отклонений и критериев, характеризующих предотказное состояние ответственных узлов БАС, программный комплекс автоматизированного формирования выдачи разрешений на полет БАС в зоне, соответствующей техническому состоянию БАС, что обеспечивает безопасный полет в разрешенной зоне, программный комплекс автоматизированного формирования наземно-воздушной многопозиционной системы наблюдения, основанной на наземных ориентирах и информации, сформированной многопозиционной воздушной системой наблюдения с помощью БАС, программный комплекс автоматизированного формирования разрешенных зон полета по регионам, программный комплекс автоматизированного формирования разрешенных правил полета, программный комплекс автоматизированного выявления БАС при их отклонении от санкционированного полета и выдачи рекомендаций для пресечения такого полета, программный комплекс автоматизированного взаимодействия региональных центров при полете БАС в двух и более регионах, программу диспетчер, объединяющую программные комплексы наземного центра контроля и управления, а каждая БАС для осуществления полетов подает заявку в региональный центр, в зоне контроля которого планируются полеты, которую регистрируют и присваивают регистрационный номер, заносят в базу данных и сохраняют данные о техническом состоянии БАС, при этом параметры технического состояния всех зарегистрированных пилотируемых и беспилотных авиационных систем сохраняются на этапе всего жизненного цикла для оценки остаточного ресурса и предотказного состояния БАС, а для выполнения каждого конкретного полета подают заявку на планируемый трафик полета, полученная информация анализируется на предмет возможности ее выполнения с учетом трафиков всех воздушных судов в зоне контроля данного регионального центра, корректируют при необходимости и при положительном решении выдают разрешение на выполнение полета, а на протяжении полета получают информацию о трафике и техническом состоянии БАС, которую заносят в базу данных, а в режиме онлайн формируют единое информационное поле, обеспечивают идентичность полетной информации у всех БВС и региональном центре, сравнивают ее с согласованными параметрами полета, выявляют отклонения от санкционированного и по результатам анализа принимают решение о корректировке трафика или о пресечении полета, при этом передачу информации осуществляют либо непосредственно с БАС, либо, при отсутствии прямой видимости с ним, путем ретрансляции через другие БАС, находящиеся в зоне прямого контроля данного регионального центра, при переходе БАС в зону контроля другого регионального центра контроль передают этому региональному центру, а также передают в этот регион всю полетную и техническую информацию по БАС для включения в информационное поле этого регионального центра, кроме того, дополнительно осуществляют вычисление по доплеровским измерениям текущих параметров трафика полета других БАС, которые ретранслируют по каналам связи наземным службам управления воздушным движением, в случае необходимости изменения маршрута в процессе полета БАС в режиме онлайн формирует соответствующую заявку, которая автоматически обрабатывается и анализируется на предмет возможности ее выполнения с учетом трафиков всех воздушных судов в зоне контроля данного регионального центра, и дают рекомендации на изменение маршрута, при этом осуществляют корректировку информационного поля для всех БАС, находящихся в зоне полете, а в чрезвычайной ситуации региональный центр автоматически изменяет информационное поле всех БАС, изменения подлежат неукоснительному выполнению.
| СИСТЕМА РАЗДЕЛЕНИЯ ВОЗДУШНЫХ СУДОВ ПРИ ДВИЖЕНИИ | 2012 |
|
RU2601968C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ТРАНСПОРТНЫХ СРЕДСТВ ЦЕНТРОМ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ В ВОЗДУШНОМ, НАЗЕМНОМ ПРОСТРАНСТВЕ | 2018 |
|
RU2676519C1 |
| СПОСОБ ОРГАНИЗАЦИИ ВОЗДУШНОГО ДВИЖЕНИЯ НА ОСНОВЕ БОРТОВОГО ГЛОНАСС/GPS-ОБОРУДОВАНИЯ И GSM/GPRS СЕТЕЙ В ВОЗДУШНОМ ПРОСТРАНСТВЕ КЛАССОВ C, G | 2015 |
|
RU2609625C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТАМИ В ОБЩЕМ ВОЗДУШНОМ ПРОСТРАНСТВЕ БЕСПИЛОТНОГО ВОЗДУШНОГО СУДНА | 2018 |
|
RU2699613C1 |
| US 9754496 B2, 05.09.2017. | |||

