Система портативных комплектов для автоматизированного целеуказания (ЦУ) на поле боя относится к групповым средствам разведки, управления и связи. Система может быть использована для управления стрельбой из стрелкового оружия, средств ближнего боя и других огневых средств прямой и полупрямой наводки (далее оружия). Система предназначена для оснащения военнослужащих общевойсковых подразделений (отделение, взвод, рота), включая мотострелковые, парашютно-десантные, десантно-штурмовые и разведывательные, Вооруженных сил, а также аналогичных подразделений других силовых структур.
Задачами системы являются измерение координат целей, непосредственно наблюдаемых (визуально обнаруживаемых) лицом, выдающим ЦУ, формирование данных ЦУ по типу и координатам цели, передача данных ЦУ лицу, принимающему ЦУ, автоматизированный визуальный поиск цели по полученному ЦУ и отображение ее положения на непосредственно наблюдаемом фоне местности, а также выполнение функций искусственных ориентиров при взаимной оптической видимости лиц, передающих и принимающих ЦУ. Результатом работы заявляемой системы является обеспечение военнослужащих подразделения данными ЦУ по непосредственно наблюдаемым целям для их оперативного визуального обнаружения и прицельного применения оружия.
Известна система ЦУ, встроенная в носимый комплекс автоматизированного управления подразделениями противотанковых ракетных комплексов (ПТРК) «Командирша-Э» [1]. Система содержит разнесенные радиолокационную станцию (РЛС) разведки и обнаружения целей, лазерный целеуказатель-дальномер (ЛЦД) разведки целей и определения их сферических координат, пульт командира подразделения, средства связи и устройство ориентирования пусковой установки (ПУ) ПТРК по углам азимута и места в виде магнитометра на кронштейне высотой не менее 60 см (последнее существенно снижает маскировочные качества комплекса).
Известен комплект средств автоматизации стрелка-зенитчика (КСАС) 9С935, входящий в состав переносного зенитного ракетного комплекса (ПЗРК) 9К333 «Верба »[2]. Базовые технические решения, принятые в КСАС, сформулированы в патенте [3]. Близким к КСАС по назначению и техническому исполнению является комплект технических средств автоматизированного управления (КТСАУ) ПЗРК [4]. Основу обоих комплектов составляет группа (система) индивидуальных средств целеуказания (ИСЦ) [2,3] (индивидуальных комплектов автоматизации (ИКА) по терминологии [4]).
Ключевыми элементами ИСЦ, реализующими отработку ЦУ, являются модуль спутниковых навигационных систем (СНС), совмещенные магнитный угловой датчик (магнитометр) и нашлемный дневной индикатор, ночной тепловизионный прицел. Результатом отработки ЦУ является разворот головы стрелка-зенитчика в расчетном направлении появления воздушной цели, указанном в ЦУ. Цель при появлении обнаруживается визуально или с помощью тепловизионного прицела. При этом нашлемный индикатор откидывается. Формирование и передача ЦУ стрелкам-зенитчикам (по радио или проводному каналу связи) осуществляется централизованно пунктом (модулем) управления зенитным подразделением по данным радиолокационного обнаружителя. Отличием ИКА является раздельное конструктивное исполнение магнитного углового датчика и нашлемного индикатора. Кроме того, в перспективной версии ИКА предусмотрен коллиматорный прицел, встроенный в очки стрелка-зенитчика.
Общими недостатками аналогов [1-4] являются:
1. Отсутствие возможности ЦУ по непосредственно наблюдаемым целям, т.к. источником данных о целях является РЛС, либо специализированный ЛЦД.
2. Узкая специализация как по целям: танки и другие наземные движущиеся цели или летательные аппараты (ЛА), так и по потребителям: наводчики-операторы ПТРК или стрелки-зенитчики ПЗРК.
3. Низкая точность угловой ориентации из-за влияния аномалий магнитного поля и необходимость трудоемкой полевой калибровки магнитометра.
4. «Однонаправленность» составных частей аналогов, т.е. четкое разделение на источник (РЛС, ЛЦД) и приемник ЦУ (ПУ ПТРК, ПЗРК) без взаимозаменяемости, что снижает тактическую гибкость их применения и живучесть на поле боя.
5. Носимый вариант конструктивного исполнения обладает значительными массогабаритными характеристиками, исключающими возможность удобного портативного размещения на военнослужащем и использования в маневренном наступательном бою.
Известны самолетно/вертолетные нашлемные системы [5-7], предназначенные для ЦУ по непосредственно наблюдаемым целям. В качестве источника ЦУ в них выступает нашлемная система летчика, канала передачи данных-бортовая проводная система информационного обмена, а приемника ЦУ-контроллеры следящих приводов головок самонаведения управляемых ракет класса «воздух-воздух» ближнего действия для истребителей или подвижной пушечной установки для вертолетов.
Как и другие аналоги, эти системы являются узкоспециализированными и «однонаправленными». Кроме того, используемые методы определения углового положения головы летчика требуют дополнительного внутрикабинного оборудования ЛА и не пригодны для применения на поле боя. Также нашлемные системы не измеряют дальность до цели и формируют ЦУ только по углам, что не позволяет их использовать при большом пространственном разнесении источника и приемника ЦУ.
Наиболее близким к заявляемому изобретению является комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний [8], содержащий дальномерно-угломерный блок, который снабжен вычислителем, соединенным с дальномером, датчиком температуры, модулем СНС с антенной, приемо-передающим радиомодулем с антенной и трехосевыми датчиком угловой скорости, акселерометром и магнитометром, а также с органами управления и индикации. Дальномерно-угломерный блок с помощью безлюфтового соединения установлен на поворотном механизме с неподвижной опорой. В комплекте содержится двухканальный угломерный модуль СНС с возможностью подключения к каждому каналу отдельной выносной антенны с собственным средством установки. Вычислитель дальномерно-угломерного блока соединен информационно и по питанию с компьютером оператора комплекта. Комплект носимой аппаратуры [8] не предназначен для обнаружения непосредственно наблюдаемых целей и информационного обмена сформированными ЦУ с другими аналогичными комплектами. Входящий в его состав приемо-передающий радиомодуль предназначен только для связи с вышестоящими звеньями управления.
Недостатками комплекта [8] являются ограниченные функциональные возможности, большие размеры и вес, непригодность для массового производства и оснащения воинских подразделений. Ограниченные функциональные возможности обусловлены отсутствием в составе комплекта радиосредства информационного обмена в сети (системе) таких комплектов. Большие размеры и вес связаны с наличием нескольких отдельных составных частей с значительными массогабаритными характеристиками, что исключает возможность удобного портативного размещения комплекта на военнослужащем. Непригодность для массового производства и оснащения обусловлена дороговизной, сложностью изготовления и подготовки военнослужащих-операторов комплекта.
Задача, стоящая перед разработчиками заявляемого изобретения, состоит в создании недорогой и удобной в применении системы портативных комплектов, способной с достаточной точностью и в различных условиях оперативно решать задачу автоматизированного формирования, приема и передачи ЦУ на поле боя.
Техническими результатами использования заявляемого изобретения являются:
- повышение оперативности формирования, приемопередачи и отработки ЦУ;
- снижение массогабаритных и стоимостных показателей комплектов;
- повышение удобства размещения и применения системы.
В совокупности указанные технические результаты обеспечивают получение общего технического результата, заключающегося в повышении боевой эффективности общевойсковых подразделений нижнего тактического звена.
Для достижения этих результатов система портативных комплектов для автоматизированного целеуказания на поле боя, содержащая дальномерно-угломерный блок, который снабжен вычислителем, соединенным с дальномером, датчиком температуры, модулем спутниковых навигационных систем с антенной, приемо-передающим радиомодулем с антенной и трехосевыми датчиком угловой скорости, акселерометром и магнитометром, а также с органами управления и индикации, содержит два и более дальномерно-угломерных блока с возможностью информационного обмена между ними через приемо-передающие радиомодули, каждый блок выполнен в виде портативного автономного моноблока, использующего в качестве органа индикации встроенный коллиматорный индикатор.
Заявляемую систему иллюстрируют следующие графические материалы:
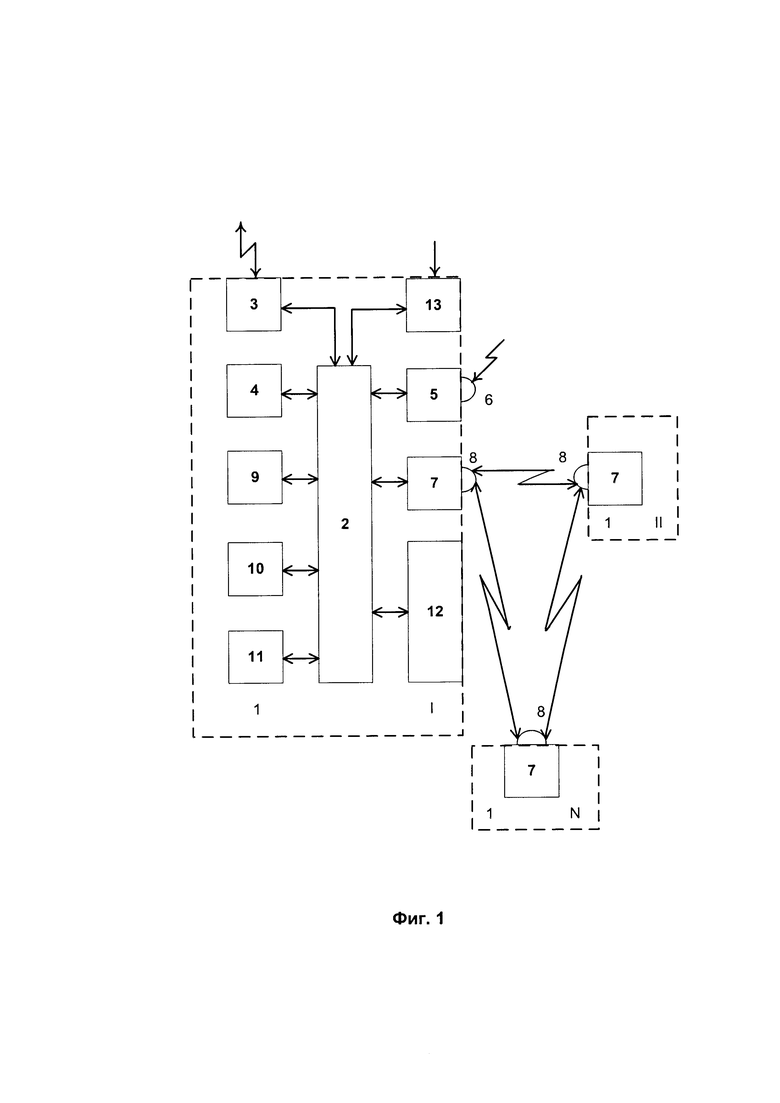
Фиг. 1. Структурная схема системы, где:
1. Дальномерно-угломерный блок (ДУБ).
2. Вычислитель.
3. Дальномер.
4. Датчик температуры.
5. Модуль СНС.
6. Антенна модуля СНС.
7. Приемо-передающий радиомодуль.
8. Антенна радиомодуля.
9. Трехосевой датчик угловой скорости (ДУС).
10. Трехосевой акселерометр.
11. Трехосевой магнитометр.
12. Органы управления.
13. Коллиматорный индикатор.
Символами I, II,…,N обозначены условные номера дальномерно-угломерных блоков ДУБ1 в составе системы; N - общее число блоков.
Примечание - Антенны 6,8 размещаются внутри радиопрозрачного корпуса ДУБ1.
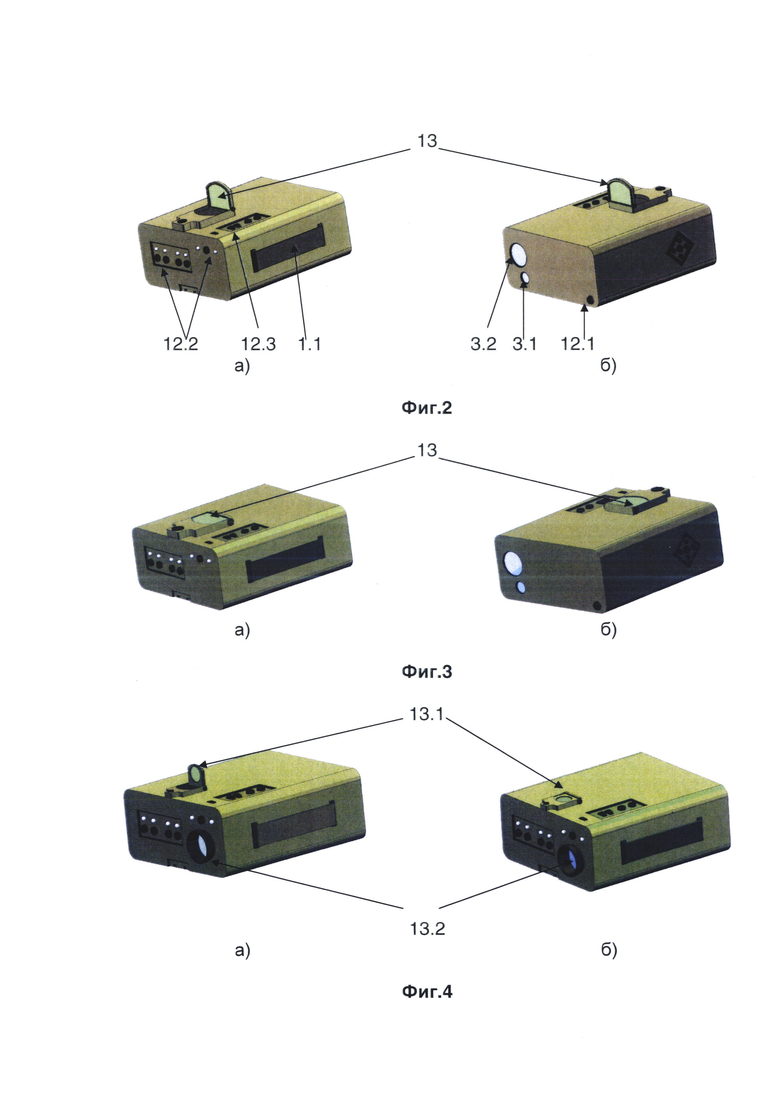
Фиг. 2. Внешний вид ДУБ1 в рабочем положении коллиматорного индикатора 13 (а)-передняя стенка, б)-задняя стенка), где:
1.1. Регулируемый ремень для удобства работы с кнопками управления и наведения на цель.
3.1., 3.2. Линзы передатчика и приемника дальномера 3.
12.1. Кнопка вкл/выкл.
12.2. Кнопки выбора способов наблюдения, абонентов и ориентиров.
12.3. Кнопки выбора режимов работы («Измерение», «Поиск», «Гироазимутальный», «Магнитный»).
Фиг. 3. Внешний вид ДУБ1 в походном положении со сложенным коллиматорным индикатором 13 (а)-передняя стенка, б)-задняя стенка).
Фиг. 4. Передняя стенка ДУБ1 с раздельным коллиматорным прицелом 13.1 и дополнительным микродисплейным индикатором 13.2 (а) -рабочее, б) -походное положение прицела 13.1). Задняя стенка аналогична Фиг. 2, 3.
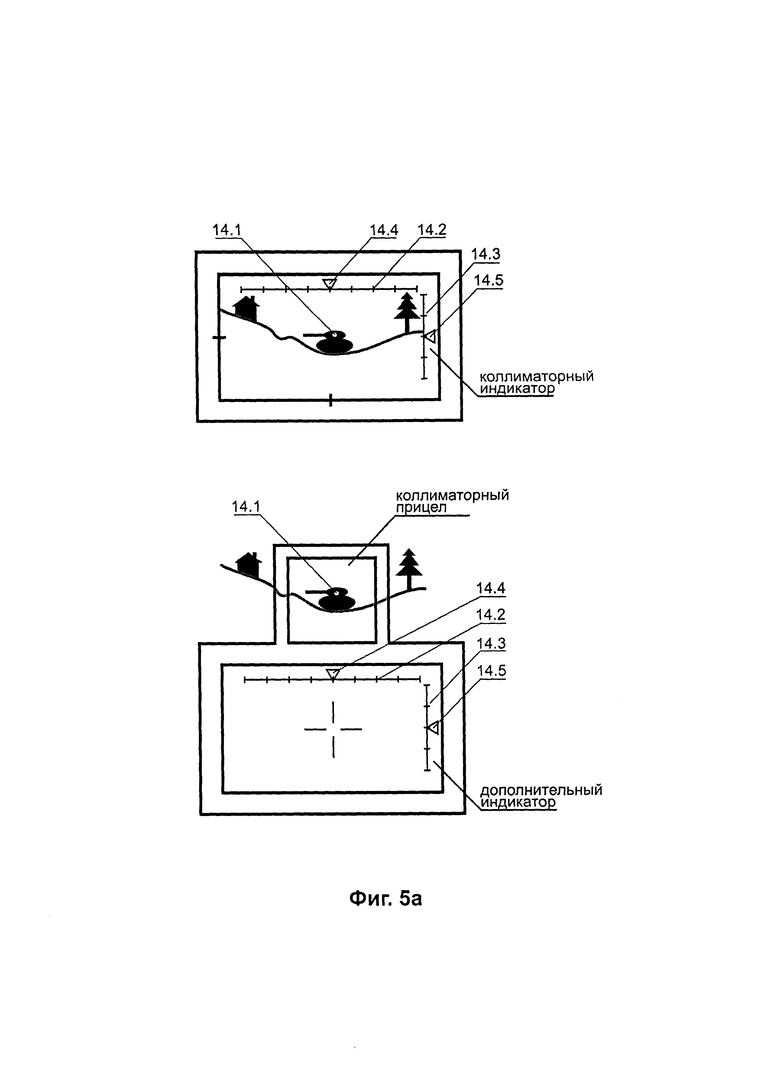
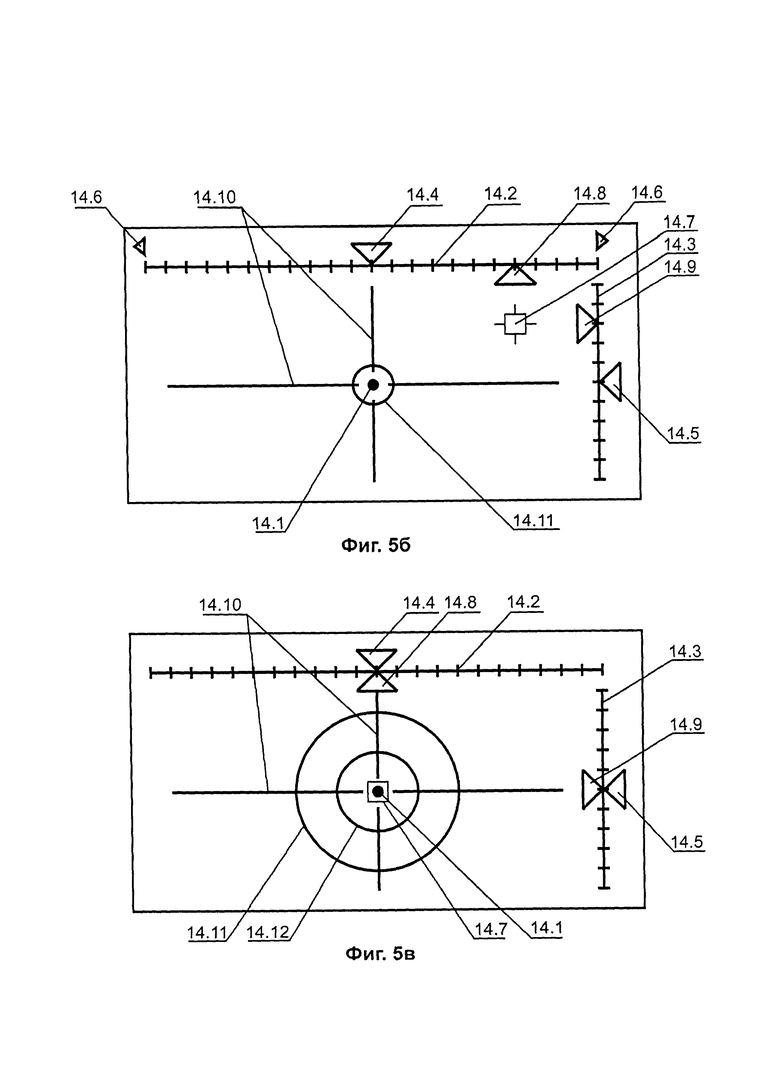
Фиг. 5. Используемые информационно-управляющие символы и отметки 14 (Фиг. 5а - режим измерения координат цели, Фиг. 5б - режим поиска цели, Фиг. 5в - режим уточнения положения цели).
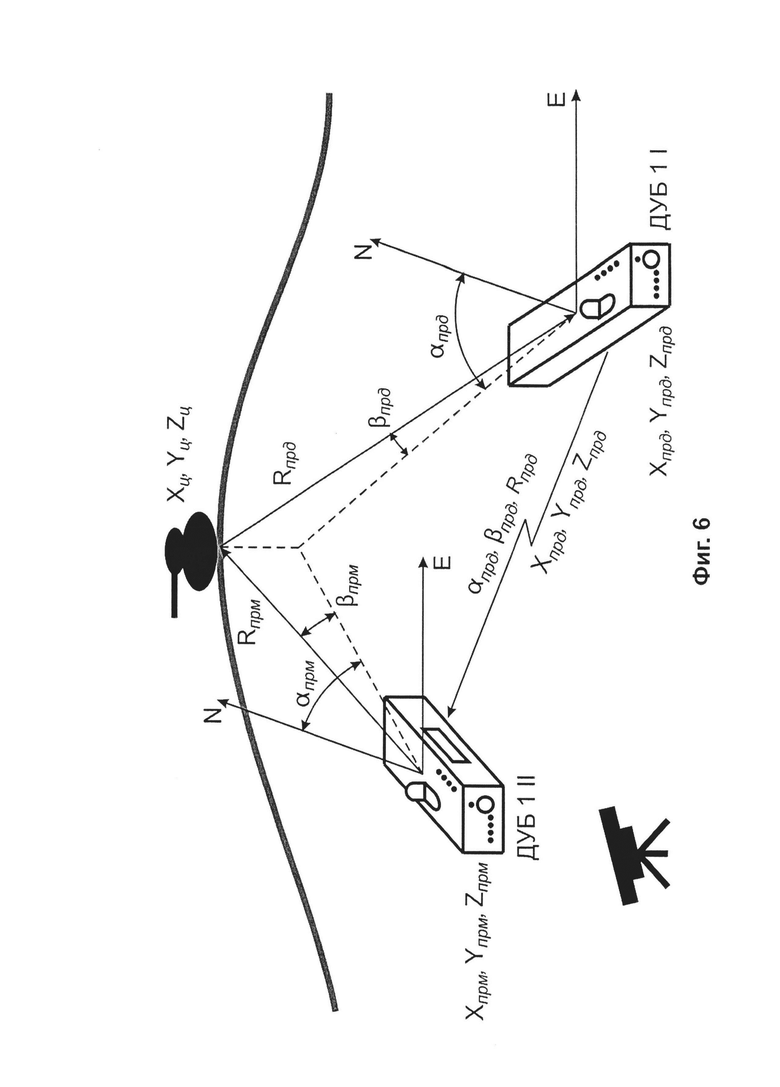
Фиг. 6. Пример взаимодействия передающего и принимающего портативных комплектов (дальномерно-угломерных блоков 1) при формировании ЦУ для ПУ ПТРК.
Существенными отличительными признаками заявляемого изобретения по сравнению с прототипом являются:
1. Наличие в составе системы двух и более дальномерно-угломерных блоков 1 позволяет оснастить средствами автоматизированного формирования, приема и передачи ЦУ всех военнослужащих общевойскового и других аналогичных подразделений.
В прототипе формирование ЦУ выполняется отдельным военнослужащим-оператором, оснащаемым единичным комплектом аппаратуры.
2. Возможность информационного обмена между дальномерно-угломерными блоками 1 через приемо-передающие радиомодули 7 позволяет построить высокоскоростную динамическую сеть передачи данных ЦУ между равноправными узлами сети (военнослужащими подразделения).
В прототипе имеющееся радиосредство предназначено для связи отдельного комплекта только с вышестоящими звеньями управления.
3. Каждый дальномерно-угломерный блок 1 выполнен в виде портативного автономного моноблочного комплекта, что обеспечивает его удобное размещение на военнослужащем, эффективное использование при отработке ЦУ и прицельном применении оружия, а также энергонезависимость от других устройств системы.
Прототип содержит несколько связанных по питанию составных частей с значительными массогабаритными характеристиками, что исключает его удобное портативное размещение на военнослужащем и эффективное применение на поле боя.
4. Использование в качестве органа индикации встроенного коллиматорного индикатора 13 с практически неограниченным полем зрения и возможностью одновременного наблюдения цели, маркера и информационно-управляющих символов и отметок 14 двумя глазами позволяет военнослужащему по полученным ЦУ оперативно визуально обнаруживать и отслеживать цель на фоне местности.
В прототипе коллиматорный индикатор отсутствует.
Рассмотрим возможность реализации заявляемой системы.
Практическая реализация составных частей 2-12 дальномерно-угломерного блока ДУБ1 (далее блока 1), Фиг. 1, не представляет сложности, поскольку все они являются обычными устройствами с функциями, соответствующими их названиям, и известными способами построения. Кратко остановимся на выполняемых ими функциях.
Вычислитель 2 выполняет функцию сбора, хранения, обработки и распространения через соответствующие интерфейсы всех видов информации, поступающей от составных частей блока 1. В качестве вычислителя 2 может использоваться СнК (система-на-кристалле) SmartFusion 2, включающая энергонезависимую матрицу ПЛИС, выполненную по Flash-технологии, и полноценную процессорную подсистему на базе процессора ARM Cortex М3. Вычислительные возможности и массогабаритные характеристики кристалла полностью соответствуют задачам, решаемым портативным блоком 1.
Дальномер 3 предназначен для измерения расстояния до цели. В его качестве может быть использован, например, миниатюрный лазерный дальномерный модуль IWT LRF905/1550, предназначенный для установки в портативные устройства с высокими требованиями по точности измерения.
Модуль СНС 5 с антенной 6 предназначен для определения плановых координат X, Y, широты В, долготы L и высоты Н (координаты Z) блока 1 (военнослужащего-носителя блока) в системе координат СК-42 или какой-либо другой системе отсчета (например, ПЗ-90.11 или WGS-84), принятой в РФ для топографических и навигационных определений. Примером исполнения модуля 5 являются образцы перспективной отечественной линейки малогабаритных навигационных модулей специального назначения «Малек» АО «КБ НАВИС».
Приемо-передающий радиомодуль 7 с антенной 8 совместно с такими же радиомодулями других военнослужащих подразделения образуют постоянно действующую высокоскоростную динамическую сеть (MANET-сеть) для радиообмена данными ЦУ и служебными сообщениями, например, на основе известного стандарта 802.11/b/g/n с использованием соответствующих широкодоступных адаптеров.
Соосные трехосевые ДУС 9, акселерометр 10 и магнитометр 11 вместе с датчиком температуры 4, выполненные по МЭМС-технологии, составляют бесплатформенную инерциальную навигационную систему (БИНС) угловой ориентации блока 1, обеспечивающую определение его углов азимута (истинного, магнитного) и места. Датчик температуры 4 предназначен для уточнения измерений датчиков 9-11 путем введения поправок по градуировочным зависимостям систематических ошибок от температуры, закладываемым в датчики при заводской калибровке. На практике эта БИНС реализуется в виде типового инерциального измерительного устройства (Inertial measurement unit, IMU), например, как комбинированные датчики STIM 300 компании Sensonor или MPU 9255 компании InvenSense. По точности, массогабаритным характеристикам и доступности эти «бюджетные» комбидатчики в полной мере соответствуют требованиям БИНС в составе портативных комплектов.
Органы управления 12 имеют стандартное кнопочное исполнение и предназначены для выбора режимов работы и инициации выполняемых блоком 1 функций (Фиг. 2).
Рассмотрим более подробно встроенный коллиматорный индикатор 13.
По своей сущности индикатор 13, Фиг. 2, 3, представляет собой средство дополненной реальности, обеспечивающее совмещение видимого военнослужащим реального изображения местности и цели с маркером и формируемыми вычислителем 2 информационно-управляющими символами и отметками (далее символами и отметками). Аппаратурной основой индикатора 13 являются прозрачный (полупрозрачный) экран (линза) и коллимирующая оптическая система, проецирующая на экран изображения маркера, символов и отметок 14. В качестве технологии изготовления экрана с коллимирующей системой может быть применено (с доработкой) решение компании Epson, реализованное в прозрачных видеоочках дополненной реальности Moverio ВТ-300, оснащенных дисплеями Si-OLED с пикопроекторами (в данном случае с одним дисплеем). Такое решение каждому военнослужащему, оснащенному портативным комплектом, обеспечивает практически неограниченное поле зрения с возможностью одновременного наблюдения двумя глазами (при произвольной ориентации относительно экрана) цели, маркера, символов и отметок, определяющих порядок действий при формировании и отработке ЦУ.
Возможен вариант раздельного исполнения индикатора 13, Фиг. 4, предусматривающий две составные части. В качестве первой составной части используется коллиматорный прицел открытого типа в бескорпусном исполнении, интегрированный в корпус блока 1. Прицел обеспечивает постоянное совмещение цели и маркера на фоне местности и обладает всеми достоинствами таких прицелов, в частности, широким угловым полем зрения. Примером практического исполнения является коллиматорный прицел HAKKO TS-FLIPUP-II со складной линзой. Второй составной частью является дополнительный индикатор, предназначенный для отображения символов и отметок 14. Примером практического исполнения служат микродисплейный индикатор НСИ-06.1 с наглазником для работы на прямом солнечном свете и микродисплейная система НСИ-06 без наглазника. Оба устройства имеют бескорпусное исполнение и легко встраиваются в корпус блока 1.
С информационной точки зрения оба варианта исполнения индикатора 13 эквивалентны. Рассмотрим более подробно используемые информационно-управляющие символы и отметки 14.
В коллиматорном индикаторе (или в дополнительном индикаторе в случае использования в качестве коллиматорного индикатора коллиматорного прицела) дальномерно-угломерного блока 1 используются следующие информационно-управляющие символы и отметки:
- отображения положения оптической оси коллиматорного индикатора на непосредственно наблюдаемом участке местности;
- общего назначения;
- отображения относительного углового положения оптической оси коллиматорного индикатора;
- отображения относительного углового положения линии визирования цели;
- обеспечения точного совмещения линии визирования цели с оптической осью коллиматорного индикатора.
При этом отображаемая информация зависит от режима работы блока 1:
- измерения координат цели (Фиг. 5а);
- поиска цели (Фиг. 5б);
- уточнения положения цели (Фиг. 5в).
Символ 14.1 - «красная точка» (маркер) отображает текущее угловое положение оптической оси коллиматорного индикатора на фоне видимого изображения наблюдаемой местности. Поскольку в блоке 1 за счет юстировки добиваются параллельности оптических осей коллиматорного индикатора и дальномера далее оптическая ось коллиматорного индикатора блока 1 будет именоваться просто оптической осью.
В режиме измерения координат цели, используемом при выработке целеуказания (Фиг. 5а), передающий военнослужащий, наблюдая местность через коллиматорный индикатор, совмещает символ 14.1 с видимым изображением цели и нажимает кнопку «Измерение». По нажатию кнопки в блоке 1 осуществляется измерение дальности до цели и запоминание пространственного углового положения линии визирования цели, совмещенной с оптической осью блока 1. Далее оператор совмещает символ 14.1 с видимым изображением выбранного ориентира, и при нажатии кнопки «Измерение» аналогично измеряет относительные координаты ориентира.
Символ 14.1 отображается на экране коллиматорного индикатора постоянно вне зависимости от используемого режима работы. В случае использования в качестве коллиматорного индикатора коллиматорного прицела, символ 14.1 является единственным отображаемым на нем символом. Остальные символы и отметки, используемые в блоке 1, должны отображаться на дополнительном индикаторе. Использование полнофункциональных коллиматорных индикаторов позволяет совмещать отображение символа 14.1 с отображением всех рассматриваемых далее символов и отметок. При этом символы 14.2 … 14.5 используются и отображаются во всех режимах работы. В случае использования в качестве коллиматорного индикатора коллиматорного прицела эти символы отображаются на экране дополнительного индикатора.
К символам общего назначения относятся подвижные шкалы азимута 14.2 и угла места 14.3. В центре подвижной шкалы азимута 14.2 отображается текущее положение оптической оси коллиматорного индикатора блока 1 по азимуту, а ее правая и левая границы соответствуют текущим значениям границ поля зрения системы отображения по азимуту. В центре подвижной шкалы угла места 14.3 отображается текущее положение оптической оси коллиматорного индикатора блока 1 по углу места, а ее верхняя и нижняя границы соответствуют текущим значениям границ поля зрения системы отображения по углу места.
Символы отображения положения оптической оси блока 1 включают в свой состав неподвижные символы с численными значением текущего азимута 14.4 и угла места 14.5 оптической оси, а также символы направления поворота блока 1 в рабочую область по азимуту 14.6.
Символы 14.4 и 14.5 находятся посередине видимых участков шкал 14.2 и 14.3, которые в свою очередь отображаются так, чтобы текущие значения углового положения оптической оси в пространстве на шкалах 14.2 и 14.3 находились напротив острия указателей 14.4 и 14.5. Одновременно рядом с символами указателей 14.4 и 14.5 отображаются соответствующие значения углового положения оптической оси в цифровой форме.
Символы 14.6 ... 14.12 используются и, соответственно, отображаются только в режимах поиска и уточнения положения цели (Фиг. 5б, 5в).
Символ 14.6 показывает кратчайшее направление поворота блока 1 по азимуту для вхождения отметки цели в рабочую зону индикатора. При нахождении отметки расчетного углового положения линии визирования цели 14.7 в рабочей зоне индикатора символ 14.6 не отображается.
С отметкой расчетного относительного углового положения цели 14.7 жестко связаны подвижные указатели углового положения линии визирования цели по азимуту 14.8 и углу места 14.9. При этом острие указателя 14.8 на подвижной шкале 14.2 находится напротив значения азимута расчетного положения цели, а острие указателя 14.9 на шкале 14.3 - расчетного угла места цели. Одновременно рядом с указателями 14.8 и 14.9 отображаются численные значения азимута и угла места расчетного положения цели.
При совмещении указателей 14.4 и 14.8, а также 14.5 и 14.9 расчетные положения оптической оси блока 1 и линии визирования цели по азимуту и углу места совпадают, т.е. блок 1 оказывается направленным на расчетное положение цели, что является конечным результатам поиска цели по полученному целеуказанию.
Для обеспечения более точного совмещения в блоке 1 используется неподвижное перекрестие 14.10, вертикальная и горизонтальная линии которого жестко связаны с остриями указателей 14.4 и 14.5 соответственно, а также «электронная лупа». Зона действия «электронной лупы» находится внутри области, ограниченной символом окружности 14.11 с центром, совпадающим с центром перекрестия 14.10.
Символ 14.1 в случае совместного отображения с другими символами всегда находится в центре перекрестия 14.10.
В режиме поиска цели, используемом при отработке (реализации) полученного целеуказания (Фиг. 5б), принимающий военнослужащий наводит блок 1 на выбранный ориентир путем совмещения символа 14.1 с видимым сквозь коллиматорный индикатор изображением ориентира и нажимает кнопку «Поиск». При этом на коллиматорном индикаторе (или дополнительном индикаторе в случае использования коллиматорного прицела) включается отображение символов 14.2 … 14.11. Задача принимающего военнослужащего по поиску цели в этом случае сводится к тому, чтобы, поворачивая блок 1 в вертикальной и горизонтальной плоскостях, добиться совмещения указателей 14.4-14.8 и 14.5-14.9 и/или совмещения отметки 14.7 с серединой перекрестия 14.10.
При попадании отметки 14.7 в пределы области «электронной лупы» 14.11 автоматически включается режим уточнения положения цели (Фиг. 5в). В этом режиме масштаб отображения шкал 14.2 и 14.3 увеличивается так, чтобы окружность 14.11 при пропорциональном увеличении ее размеров заняла всю рабочую область индикатора. Для облегчения удержания отметки цели 14.7 на середине перекрестия 14.10, что особенно важно при работе блока 1 с рук (т.е. без треноги или штатива), в этом режиме вместе с окружностью 14.11 дополнительно отображаются одна или несколько дополнительных концентрических окружностей меньшего радиуса 14.12.
В результате поворота дальномерно-угломерного блока 1 до совмещения 14.7 и 14.10 на наблюдаемом через коллиматорный индикатор (прицел) изображении местности отметка 14.1 оказывается наложенной (с учетом погрешности целеуказания) на непосредственно видимое изображение цели, т.е. задача отработки (реализации) целеуказания решена.
Рассмотрим работу заявляемой системы.
Работа системы портативных комплектов для автоматизированного целеуказания на поле боя определяется тактикой действий общевойскового подразделения при подготовке и ведении боя [9]. Разведку и обнаружение целей противника с началом боя ведет весь личный состав подразделения. Военнослужащие действуют в назначенных секторах, либо (самостоятельно) в круговом обзоре.
Для подразделения, оснащенного заявляемой системой портативных комплектов, тактика действий строится по методу сопряженного наблюдения, предусматривающего одновременное наблюдение целей (ориентиров) двумя и более военнослужащими. Визуальное обнаружение целей, формирование ЦУ (преимущественно командирами), их прием и передача ведутся в единой для всех военнослужащих системе отсчета, задаваемой дирекционными углами α, углами места β, дальностями R и прямоугольными координатами X, Y, Z (высотой Н), например, в системе координат СК-42.
Без потери общности далее рассматривается взаимодействие пары военнослужащих - передающего (прд) и принимающего (прм) ЦУ. Действия других военнослужащих подразделения аналогичны.
В заявляемой системе используются три способа (по выбору) реализации метода сопряженного наблюдения, различающихся содержанием передаваемого ЦУ: в сферических координатах относительно передающего, в сферических координатах относительно принимающего и в прямоугольных координатах. Во всех трех случаях итоговое ЦУ должно содержать дирекционный угол αпрм, угол места βпрм цели и дальность Rпрм до нее относительно принимающего. Это обусловлено требованием высокой оперативности визуального обнаружения цели и прицельного применения оружия именно принимающим военнослужащим, для которого такое ЦУ наиболее удобно.
Кратко рассмотрим указанные способы.
При первом способе ЦУ, Фиг. 6, портативным комплектом передающего военнослужащего измеряются и передаются принимающему дирекционный угол αпрд, угол места βпрд и дальность Rпрд цели. Портативный комплект принимающего по полученным данным и известным координатам Хпрд, Yпрд, Zпpд передающего (постоянный обмен координатами между военнослужащими обеспечивается MANET-сетью подразделения) рассчитывает координаты цели:

после чего обратным пересчетом с использованием собственных координат Хпрм, Yпрм, Zпрм получает требуемое ЦУ:

Второй способ отличается от первого выполнением расчетов по формулам (1), (2) на передающей стороне. Задачей принимающего является получение и отработка ЦУ (2).
При третьем способе расчеты делятся между передающим (формулы (1)) и принимающим (формулы (2)) с промежуточной передачей координат цели (1) принимающему.
Реализация изложенных метода и способов требует измерения (передающей стороной) и воспроизведения (приемной стороной при отработке ЦУ) дирекционного угла α и угла места β цели, а также дальности R до нее. Ключевыми здесь являются угловые измерения, скоростью получения и точностью которых определяется оперативность визуального обнаружения цели и прицельного применения оружия. На них сосредоточим основное внимание.
Важно подчеркнуть, что для всех способов ЦУ должно выполняться требование согласования погрешностей итогового ЦУ αпрм, βпрм, складывающихся при пересчетах (1), (2) из ошибок исходных измерений углов αпрд, βпрд и дальности Rпрд, погрешностей определения координат Хпрд, Yпрд, …, Zпрм передающего и принимающего и других факторов, с размерами углового поля зрения коллиматорного индикатора (прицела) комплекта принимающего.
Это означает, что, например, для поля зрения размером  доверительный интервал погрешностей по каждой угловой координате αпрм, βпрм (среднеквадратические отклонения (СКО) погрешностей считаем одинаковыми, σαпрм=σβпрм=σпрм):
доверительный интервал погрешностей по каждой угловой координате αпрм, βпрм (среднеквадратические отклонения (СКО) погрешностей считаем одинаковыми, σαпрм=σβпрм=σпрм):
Iр=(-tpσпрм; tpσпрм),
где tp - число СКО, определяемое доверительной вероятностью Р, не должен превышать размера поля зрения 1°. Так, при использовании коллиматорного прицела с полем зрения (12°х12°) при доверительной вероятности Р=0,95 (число tp=2) допустимое СКО σпрм целеуказания αпрм, βпрм по каждому углу не должно превышать 3°, т.е. требуемая точность достаточна высока. Это гарантирует (с вероятность 0,95) практически беспоисковое визуальное обнаружение цели принимающим. Учитывая эффект нарастания погрешностей при пересчетах (1), (2), требование к точности измерения исходных углов αпрд, βпрд оказывается еще выше.
Далее для конкретности рассматривается первый способ ЦУ.
В соответствии с составом измерительных датчиков 9-11, входящих в дальномерно-угломерный блок 1, возможны два режима определения углов αпрд, βпрд цели: гироазимутальный и магнитный. Оба режима требуют предварительного задания угловых ориентиров. В этом смысле режимы являются модифицированным вариантом известного (четвертого) способа целеуказания от ориентира.
В гироазимутальном режиме, являющемся основным, определению подлежит истинный азимут цели  с последующим переходом к дирекционному углу
с последующим переходом к дирекционному углу  вычитанием сближения меридианов δαсм. Режим выполняется в географической системе координат OENh путем расчета направляющих косинусов
вычитанием сближения меридианов δαсм. Режим выполняется в географической системе координат OENh путем расчета направляющих косинусов  ,
,  ,
,  продольной оси OY связанной системы координат OXYZ блока 1 (оси системы согласованы с осями датчиков 9-11) относительно осей системы OENh. Реализуется пошаговая рекуррентная процедура:
продольной оси OY связанной системы координат OXYZ блока 1 (оси системы согласованы с осями датчиков 9-11) относительно осей системы OENh. Реализуется пошаговая рекуррентная процедура:

где δХ(k)=ωх(k)Т, δу(k)=ωу(k)Т, δZ(k)=ωz(k)Т - пошаговые приращения углов вращения блока 1; ωх(k), ωy(k), ωz(k) - текущие показания (отсчеты) ДУС 9, Т - шаг выдачи показаний; k=1, 2, … K - номер шага; K - количество отсчетов на интервале измерения.
От внешне аналогичной процедуры (3) в описании прототипа [8] эта процедура принципиально отличается обратным порядком расчетов: разворот (вращение) блока 1 выполняется перенацеливанием его продольной оси OY с цели на ориентир, а не с ориентира на цель, как принято в прототипе. При этом начальное значение угла  (0) (именно это значение есть искомый истинный азимут цели) принимается равным нулю
(0) (именно это значение есть искомый истинный азимут цели) принимается равным нулю  а начальный угол места βпрд(0) (угол тангажа блока 1), являющийся искомым углом места цели, определяется соотношением:
а начальный угол места βпрд(0) (угол тангажа блока 1), являющийся искомым углом места цели, определяется соотношением:

где g - ускорение силы тяжести; ау(0) - показание Y-ой оси чувствительности акселерометра 10, направленной в цель. При необходимости рассчитывается угол крена блока 1 γпрд(0)=arctg[-ax(0) / az(0)], где ах(0), az(0) - соответствующие показания Х-ой, Z-ой осей акселерометра.
Важно подчеркнуть, что операция перенацеливания блока 1 выполняется военнослужащим стоя (лежа) с рук с использованием коллиматорного индикатора 13 последовательным совмещением маркера с целью и ориентиром.
Начальные условия процедуры (3) задаются так:
с1(0)=0, с2(0)=cosβпрд(0), с3(0)=sinβпрд(0).
По окончании разворота блока 1 (k=K) рассчитывается угловое приращение (положительное или отрицательное в зависимости от взаимного расположения цели и ориентира):

вычитанием которого из известного истинного азимута ориентира  определяется истинный азимут цели:
определяется истинный азимут цели:

Одновременно может рассчитываться угол места ориентира βпрд.ор=arcsin[c3(K)], который с точностью до погрешностей измерения и обработки совпадает с его известным углом места.
Возможен вариант определения угла βпрд.ор по соотношению (4) с использованием измерения акселерометра ау(K) на момент окончания разворота.
Выставка принимающего блока 1 при отработке ЦУ выполняется воспроизведением заданных дирекционного угла αпрм и угла места βпрм цели. Изложенный выше процесс реализуется в обратной последовательности (от ориентира к цели) с использованием общего или разных ориентиров. Итогом является оперативный визуальный поиск и обнаружение цели с совмещением маркера коллиматорного индикатора 13 с целью (соответствует докладу «Цель вижу»), либо без совмещения, если цель принимающим не видна, но уяснено ее местоположение («Цель не вижу»). В противном случае принимающий запрашивает повторное целеуказание («Цель не понял»).
В магнитном (дополнительном) режиме раздельно или одновременно с гироазимутальным измеряется магнитный азимут цели  . Значение
. Значение  определяется в магнитной географической системе координат OEмNмh и рассчитывается по формуле:
определяется в магнитной географической системе координат OEмNмh и рассчитывается по формуле:

где βпрд(0), γпрд(0) - прежние углы тангажа (места цели) и крена, соответствующие направленной в цель продольной связанной оси OY (Y-й оси чувствительности магнитометра 11); Нх, Ну, Hz - проекции магнитного поля Земли, измеренные магнитометром в данном фиксированном положении блока 1.
Принципиальное отличие режима от аналогичного в прототипе [8] состоит в следующем.
В прототипе переход от измеренного магнитного азимута цели  к истинному
к истинному  осуществляется суммированием априорного значения магнитного склонения δαмс. Такой подход не учитывает влияния переменных во времени и пространстве глобальных и локальных магнитных аномалий. В результате низкой оказывается итоговая точность дирекционного угла цели αпрд.
осуществляется суммированием априорного значения магнитного склонения δαмс. Такой подход не учитывает влияния переменных во времени и пространстве глобальных и локальных магнитных аномалий. В результате низкой оказывается итоговая точность дирекционного угла цели αпрд.
В рассматриваемом магнитном режиме, как в предыдущем гироазимутальном, после наведения блока 1 (магнитометра 11) в цель выполняется его перенацеливание в ориентир. В этом положении в соответствии с формулой (5) определяется магнитный азимут ориентира  . По известному истинному азимуту ориентира
. По известному истинному азимуту ориентира  рассчитывается калибровочная поправка
рассчитывается калибровочная поправка  которая используется для коррекции измеренного магнитного азимута цели
которая используется для коррекции измеренного магнитного азимута цели  :
:

Точность скорректированного значения  выше точности исходного значения
выше точности исходного значения  . Обусловлено это тем, что поправка
. Обусловлено это тем, что поправка  , помимо стандартного магнитного склонения δαмc, содержит составляющую, компенсирующую влияние магнитных аномалий. В итоге более точным оказывается искомый дирекционный угол αпрд.
, помимо стандартного магнитного склонения δαмc, содержит составляющую, компенсирующую влияние магнитных аномалий. В итоге более точным оказывается искомый дирекционный угол αпрд.
Отметим, что все операции в магнитном режиме выполняются военнослужащими в той же последовательности и в тех же условиях (стоя, лежа, с рук), что и ранее.
Оба режима требуют истинных азимутов  ориентиров (относительно передающего и принимающего) или, с поправкой на сближение меридианов δαсм, их дирекционных углов αор. Независимо от характера ориентиров - естественные элементы местности, здания и объекты инфраструктуры, выставляемые вешки и реперы и др., - требуется их предварительная координатная привязка. Привязка выполняется традиционными топогеодезическими средствами, аппаратурой спутниковой навигации, по топографическим картам. Особо эффективны здесь (в частности, из-за наличия высотного профиля) современные геоинформационные системы (ГИС), например, такие как полная версия отечественной ГИС «Панорама» и ее военный аналог ГИС «Оператор».
ориентиров (относительно передающего и принимающего) или, с поправкой на сближение меридианов δαсм, их дирекционных углов αор. Независимо от характера ориентиров - естественные элементы местности, здания и объекты инфраструктуры, выставляемые вешки и реперы и др., - требуется их предварительная координатная привязка. Привязка выполняется традиционными топогеодезическими средствами, аппаратурой спутниковой навигации, по топографическим картам. Особо эффективны здесь (в частности, из-за наличия высотного профиля) современные геоинформационные системы (ГИС), например, такие как полная версия отечественной ГИС «Панорама» и ее военный аналог ГИС «Оператор».
Базовой является формула расчета дирекционного угла (на примере передающего):
αпрд.ор=arctg[(Yop-Yпрд)/(Хор-Хпрд)]
по плановым координатам Xор, Yop, Хпрд, Yпрд ориентира и передающего в системе СК-42.
Важным свойством заявляемой системы является возможность использования в качестве искусственных ориентиров передающего и принимающего при их взаимной оптической видимости. В этом случае координатами ориентира становятся координаты принимающего, Xор=Хпрм, Yop=Yпрм. Такой способ позволяет отказаться от внешних ориентиров и их предварительной привязки и решать задачу угловой ориентации собственными средствами подразделения. При этом наведение передающего комплекта на принимающего (ориентир) проводится одновременно с передачей ЦУ.
Таким образом, заявляемая система портативных комплектов для автоматизированного целеуказания на поле боя может быть реализована и позволяет повысить боевую эффективность общевойсковых подразделений.
Источники информации:
1. http://roe.ru/catalog/sukhoputnye-vosyka/kompleksy-sredstv-avtomatizirovannogo-upravleniya-ognem-artillerii/komandirsha-е/
2. http://oruzhie.info/vojska-pvo/727-verba
3. Патент RU 2289083
4. http://www.arms-exp.ru/armament/samples/1091/59292/
5. Патент RU 2321813
6. Патент RU 2464617
7. Патент RU 2516857
8. Патент RU 2661676
9. Боевой устав по подготовке и ведению общевойскового боя. Часть 3. Взвод, отделение, танк. Военное издательство, 2005 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ С ДОРАЗВЕДКОЙ ЦЕЛИ | 2020 |
|
RU2747740C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ (ВАРИАНТЫ) И УСТРОЙСТВО ОРИЕНТИРОВАНИЯ ПУСКОВОЙ УСТАНОВКИ ВООРУЖЕНИЯ | 2011 |
|
RU2463542C1 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ДВИЖУЩУЮСЯ ЦЕЛЬ | 2011 |
|
RU2463543C1 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
| СПОСОБ ПРЯМОГО НАВЕДЕНИЯ ВООРУЖЕНИЯ НА ЦЕЛЬ | 2003 |
|
RU2239766C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| КОМПЛЕКС ДЛЯ ПЕРСОНАЛЬНОЙ НАВИГАЦИИ | 2014 |
|
RU2574309C2 |
Изобретение относится к групповым средствам разведки, управления и связи и предназначено для управления стрельбой из стрелкового оружия и других огневых средств военнослужащими общевойсковых и аналогичных подразделений на поле боя. Система содержит два и более дальномерно-угломерных блока (комплекта) с возможностью информационного обмена между ними. Каждый блок снабжен вычислителем, дальномером, модулем спутниковых навигационных систем, приемо-передающим радиомодулем, трехосевыми датчиком угловой скорости, акселерометром и магнитометром, датчиком температуры, а также органами управления и индикации. Блоки выполнены в виде портативных автономных моноблоков, каждый из которых содержит встроенный коллиматорный индикатор. Технический результат изобретения – повышение боевой эффективности подразделений нижнего тактического звена. 6 ил.
Система портативных комплектов для автоматизированного целеуказания на поле боя, содержащая дальномерно-угломерный блок, который снабжен вычислителем, соединенным с дальномером, датчиком температуры, модулем спутниковых навигационных систем с антенной, приемо-передающим радиомодулем с антенной и трехосевыми датчиком угловой скорости, акселерометром и магнитометром, а также с органами управления и индикации, отличающаяся тем, что система содержит два и более дальномерно-угломерных блока с возможностью информационного обмена между ними через приемо-передающие радиомодули, каждый блок выполнен в виде портативного автономного моноблока, использующего в качестве органа индикации встроенный коллиматорный индикатор.
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| СИСТЕМА ИНФОРМАЦИОННОГО ОБМЕНА ТОПОПРИВЯЗЧИКА | 2012 |
|
RU2498222C1 |

