Изобретение относится к области авиационной техники и касается создания многовинтовых преобразуемых беспилотных и скоростных вертолетов, снабженных системой распределенной тяги разновеликих винтов по схеме Х2+4. имеющей два больших и два меньших несущих, но и два поворотных толкающих винта, расположенных на консолях первого и второго крыла Х-образной стреловидности соответственно обратной и прямой стреловидности, но и на конце удлиненных гондол, обеспечивающих возможность выполнения технологии вертикального или короткого взлета и посадки (ВВП или КВП), но и короткого взлета и вертикальной посадки (КВВП).
Известен беспилотный вертолет модели Ка-137 ОКБ «им. Камова» (Россия), выполненный по двухвинтовой соосной схеме, имеет фюзеляж сферической формы без оперения и силовую установку, включающую двигатель, смонтированный в моторном отсеке и передающий крутящий момент через главный редуктор и систему валов на соосные двухлопастные винты, обеспечивающие вертолетные и крейсерские режимы полета, шасси четырехстоечное рессорного типа для амортизационной посадки.
Признаки, совпадающие - наличие поршневого двигателя и главного редуктора, передающего мощность на несущие винты, создающие вертикальную тягу, а соответствующие изменения общего шага и циклического шага винтов, обеспечивают при его полете перемещение вверх-вниз, вперед-назад, влево-вправо, так и его поступательный горизонтальный полет. Вращение несущих спаренных соосных винтов - синхронизирующее и противоположно направленное. Взлетная тяговооруженность силовой установки вертолета мод. Ка-137 позволяет достигать полезной нагрузки 60 кг при взлетном его весе 310 кг и способен перемещаться на высоте 5000 м со скоростью до 145…175 км/ч, время полета может составить до 4 ч, дальность полета - до 530 км, имеет при сложенных лопастях винтов стояночные габариты (3,6×1,3×2,3 м) и может использоваться в многоцелевых беспилотных вертолетных комплексах.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем двухвинтовой соосной схемы имеет большой объем регламентных работ, малую весовую отдачу и радиус действия, а постоянные вибрации, возникающие при работе автоматов перекоса, создающие неблагоприятные условия для работы других механизмов и оборудования, весьма снижают разрешающую способность аэрофотосъемочной аппаратуры и, особенно, ТВ камеры; вторая - это то, что при висении соосное расположение спаренных несущих винтов изменяемого шага и с управлением циклического шага нижнего из них значительно осложняет их конструкцию, а постоянные вибрации, возникающие при работе автомата его перекоса, создающего неблагоприятные условия для работы других механизмов и оборудования; третья - это то, что соосное расположение двух несущих винтов создаст вредную обдувку нижнего несущего винта верхним, усложняет схему редуцирования, а также значительно увеличивает массу редуктора и его высоту, что ограничивает возможности базирования на кораблях; четвертая - это то, что в вертолете двухвинтовой соосной схемы с шарнирным креплением лопастей имеют место неблагоприятное взаимное влияние (индуктивные потери) соосных несущих винтов, которое в отдельных случаях может приводить и к их перехлесту и, как следствие, повышению аварийности полетов и снижению безопасности. Все это ограничивает дальнейшее повышение скороподъемности, скорости и дальности полета, показателей транспортной и топливной эффективности, но и упрощение управляемости по крену при скоростном полете.
Известен многоцелевой беспилотный вертолет модели Boeing А160 «Humming-bird» (США), выполненный по одновинтовой схеме с четырехлопастным несущим и двухлопастным рулевым винтами, имеет силовую установку, включающую газотурбинный двигатель, передающий крутящий момент через главный редуктор и систему соединительных валов трансмиссии на несущий и хвостовой винты, вертикальное оперение, смонтированное под хвостовой балкой, оснащенное в носке килевой его поверхности амортизационной стойкой заднего колеса трехопорного колесного шасси, снабженного убирающимися главными боковыми опорами с передними колесами.
Признаки, совпадающие - наличие вертикального оперения и газотурбинного двигателя, главного редуктора и валов трансмиссии, передающих мощность четырехлопастному несущему и двухлопастному рулевому винтам, обеспечивающим перемещение вверх-вниз, вперед-назад, влево-вправо и в любой комбинации при его поступательном полете. Вращение несущего и рулевого винтов синхронизирующее, взлетная тяговооруженность силовой установки, обеспечивающая максимальные скорости его полета до 260 км/ч и продолжительное время при висении, а также высоту полета до 6096 м и дальность полета до 4150 км. Многоцелевой беспилотный вертолет мод. Boeing А160 при взлетном весе 2950 кг, имея целевую нагрузку 860 кг, может применяться в беспилотных вертолетных комплексах для разведывательных и ударных операций с использованием управляемых ракет класса «воздух-поверхность» типа AGM-114 «Hellfire», а также обнаружения целей и ретрансляции разведданных.
Причины, препятствующие поставленной задаче: первая - это то, что вертолет с движителем в виде несущего четырехлопастного винта, имеющего автомат перекоса, имеет большой объем регламентных работ и является дорогим в эксплуатации, но и малую весовую отдачу; вторая - это то, что силовая установка дорогостоящего беспилотного вертолета включает один газотурбинный двигатель и, тем самым, снижает надежность крейсерского полета при его отказе; третья - это то, что в вертолете одновинтовой схемы имеют место непроизводительные затраты до 10…12% мощности силовой установки на привод рулевого винта, необходимость хвостовой балки и агрегатов хвостовой трансмиссии, а также опасность, создаваемая рулевым винтом для наземного персонала; четвертая - это то, что вес рулевого винта вместе с хвостовой балкой и агрегатами хвостовой трансмиссии составляет до 15…20% веса пустого беспилотного вертолета и имеет тенденцию к увеличению с ростом взлетного его веса. Все это и ограничивает возможность дальнейшего повышения максимальной скорости полета и скороподъемности, а также показателей транспортной эффективности.
Наиболее близким к предлагаемому изобретению является экспериментальный самолет с укороченным взлетом и посадкой ОКБ-155 (Россия) [Научно-популярный журнал ВВС. Авиация и космонавтика №3, 2001 г., с.37]. представляющий собой моноплан с высокорасположенным крылом, содержит короткий фюзеляж, силовую установку, включающую двигатель и задний редуктор со спаренными соосными винтами, обеспечивающими горизонтальную тягу и соответствующим их отклонением на удлиненных поворотных валах между балок П-образного оперения вертикальную или наклонную тягу, трехстоечное убирающееся колесное шасси.
Признаки, совпадающие - наличие моноплана двухбалочной схемы и со средне-расположенным трапециевидным крылом, снабженным наплывами с прямой стреловидностью и разнесенным двухкилевым оперением. Спаренные соосные винты на удлиненных поворотных валах (отклоняемые между разнесенного двухкилевого оперения), расположенные в задней части фюзеляжа и обеспечивающие горизонтальную тягу и соответствующим отклонением вниз от горизонтального положения вертикальную на угол 90° или наклонную тягу на угол 60° соответственно при вертикальном взлете, посадке и висении или при выполнении посадки с коротким пробегом, но и технологии укороченного взлета. Трехстоечное убирающееся колесное шасси.
Причины, препятствующие поставленной задаче: первая - это то, что диаметры отклоняемых вниз задних соосных винтов ограничены высотою стоек главного шасси и как, следствие, это ограничивает вертикальную тяговооруженность, а однодвигательная силовая установка (СУ), снижая надежность вертикального взлета при его отказе, ограничивает взлетный его вес и с целью его увеличения предопределяет возможность только короткого взлета и посадки с отклоненными винтами на угол 60°: вторая - это то, что средства аэродинамической балансировки при помощи подвижных концевых частей крыла предопределяет конструктивно сложное крыло, снабженное сложной системой их отклонения и механизации крыла, что усложняет конструкцию и уменьшает надежность: третья - это то, что подвижные концевые части крыла с увеличением их угла отклонения в плоскости хорды крыла вперед на некоторые углы на переходных режимах полета создают опасность появления пикирующего момента до создания стабилизатором двухкилевого оперения необходимой парирующей силы, что снижает надежность и безопасность. Это также предопределяет удаленное расположение стабилизатора от центра масс и, следовательно, увеличение длины разнесенных балок и, как следствие, планера, что усложняет продольную балансировку на переходных режимах полета и не обеспечивает достаточную стабильность управления. Четвертая - это то, что при взлете и посадке самолета соосные трехлопастные винты, имеющие взаимно противоположное вращение, при помощи гидравлического привода поворачиваются относительно оси редуктора вниз, создают тем самым наклонную/вертикальную тягу (двухбалочная схема в полной мере способствует свободному отклонению винтов между разнесенных балок). При этом вынужденно близкое расположение осевой вертикальной линии соосных винтов к центру масс самолета предопределяет в отклоненном вниз положении затенение их межбалочной частью крыла, создавая при этом значительную потерю в вертикальной их тяге. Все это ограничивает повышение взлетного веса и увеличения весовой отдачи, эксплуатационных характеристик, показателей транспортной и топливной эффективности.
Предлагаемым изобретением решается задача в указанном выше известном сверхлегком экспериментальном самолете с укороченным взлетом и посадкой, упрощения конструкции и исключения подвижных концевых частей крыла, повышения полезной нагрузки и увеличения весовой отдачи, уменьшения потребной мощности на продольную балансировку при висении и упрощения путевой, поперечной и продольной управляемости, повышения скороподъемности, высоты и дальности полета.
Отличительными признаками предлагаемого изобретения от указанного выше известного экспериментального самолета с укороченным взлетом и посадкой, наиболее близкого к нему, являются наличие того, что он снабжен крыльями с разнонаправленной Х-образной стреловидностью, концевые хорды которых, расположенные впереди и сзади по потоку относительно совмещенных в плане их корневых хорд соответственно первого крыла обратной и второго крыла прямой стреловидности, образованные по линии четвертей их хорд и вдоль сторон вертикальных продольных и поперечных углов, имеющих вершину, расположенную в центре масс, и выполнен по концепции разнесенного расположения на консолях крыльев шестивинтовой системы с распределенной тягой разновеликих винтов но схеме 2+4, которая наряду двух несущих больших винтов, смонтированных с их редукторами на пилонах, размещенных на законцовках первого крыла, снабжена на смонтированном выше последнего втором крыле двумя меньшими несущими винтами, смонтированными с их редукторами на задних пилонах, размещенных между внутренними и внешними закрылками второго крыла и смонтированных совместно с его крыльевыми удлиненными гондолами, оснащенными на их концах двумя поворотными редукторами с задними меньшими винтами, имеющими возможность их свободного вращения как за соответствующим трапециевидным вертикальным килем, снабженным внешними консолями большого удлинения разнесенного стабилизатора, смонтированною по внешним бортам обтекателей поворотных редукторов удлиненных гондол, так и под последними, при этом все трапециевидные пилоны на двух крыльях, снабженных по всему размаху их консолей закрылками, уменьшающими при их максимальном отклонении общие потери на 11% в вертикальной тяге всех консольных несущих винтов, имеющие в их поперечнике каплевидную удобообтекаемую форму, смонтированы так, что их продольные оси размещены параллельно плоскости симметрии, каждый поворотный редуктор удлиненной гондолы с задним меньшим винтом (ЗМВ), имеющий узел его поворота, поперечная ось которого направлена перпендикулярно к плоскости симметрии, смонтирован на конце удобообтекаемой гондолы, что позволит как уменьшить потери вертикальной их тяге, так и обеспечит при создании им маршевой тяги боковой подсос воздушного потока и его направления вдоль соответствующего борта фюзеляжа-гондолы под каждую пару большего и меньшего винтов в левой и правой группе несущих винтов, создающих при их авторотации и скоростном горизонтальном полете асимметричную подъемную силу, составляющую в сумме 50% от общей подъемной силы, создаваемой разновеликими крыльями, компенсирующими данную асимметрию, но и снабжен возможностью преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, обеспечивающей вращение всех винтов без взаимного их перекрытия как в передней и задней, так и в левой и правой группе винтов, выполненных без автоматов перекоса их лопастей и имеющих при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между соответствующими винтами левой и правой групп с обеспечением одинакового направления вращения между диагонально расположенными группами винтов как переднего левого и двух правых задних, так и переднего правого и двух левых задних, имеющих при виде сверху направление вращение соответственно как по часовой стрелке, так и против и устраняющих гироскопический эффект и создающих более плавное обтекание крыльев воздушным потоком от винтов, в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей ЗМВ маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 10 или 20% больше от нормального взлетного веса при вращающихся двух передних с двумя задними несущими винтами при их авторотации или на режиме, близком к их самовращению соответственно от набегающего воздушного потока или от одного из работающих двигателей, выдающего 30 или 60% от взлетной его мощности, которые передаются соответственно полностью на ЗМВ или пополам на два последних и на четыре несущих винта, но и обратно, поворотные редукторы удлиненных гондол двух ЗМВ, имеющих электромеханические приводы, обеспечивающие диапазон их поворота с соответствующей внешней консолью стабилизатора на положительные углы ее атаки (α1ст) от 0° до +90°, снабжен возможностью ускоренного их синхронного совместного отклонения и от вертикально расположенной каждой внешней консоли стабилизатора при висении как синфазного их поворота на угол α2ст=±15° назад и вперед по полету соответственно для поступательного горизонтального полета вперед и назад, но и возможности зависания на месте при встречном и попутном ветре соответственно, так и дифференциального их поворота на угол α2ст=±15° назад/вперед - для сверхманевренного управления по курсу с декомпенсацией реактивного момента от работы несущих винтов, и от горизонтально расположенной каждой внешней консоли стабилизатора при создании ЗМВ маршевой тяги для скоростного горизонтального полета как синфазного, так и дифференциального их поворота на угол α2ст=±15° вверх и вниз по полету соответственно для сверхманевренного управления как по тангажу, так и крену, но и при синфазном их отклонении вниз от 0° до +15° и ускоренного вниз от +15° до +45° для выполнения в перегрузочном варианте при полетной его конфигурации крылатого автожира или винтокрыла соответственно после разбега и технологии короткого взлета, но и в обратном порядке и технологии укороченной посадки и пробега с обеспечением при этом толкающими ЗМВ реверса их тяги, система трансмиссии, имея наряду с многопоточным двухуровневым крестообразным в плане главным редуктором, обеспечивающим передачу взлетной мощности, например, от турбодизельных двигателей (ТДД) к передней и задней группе несущих винтов посредством соответственно нижних и верхних соединительных валов, проходящих внутри соответствующих консолей Х-образной формы в плане крыла, связывающих как пару больших несущих винтов первого крыла, так и пару меньших несущих винтов, но и пару поворотных ЗМВ второго крыла через как два угловых, так и два угловых двухпоточных редуктора, обеспечивающих перегибы соответственно как в вертикальной, так и вертикальной, но и горизонтальной плоскости соответствующих соединительных валов, последние два из которых проходят соответственно в задних пилонах несущих меньших винтов и удлиненных гондолах к поворотным редукторам ЗМВ под смежным меньшим углом к линии четвертей хорд второго крыла, величина которого равновеликая половине от одного из вертикальных углов, биссектриса которого размещена по оси симметрии и оснащен двумя входными валами, размещенными по направлению полета за центром масс и по обе стороны от оси симметрии и связанными с ТДД, имеющими для отбора их взлетной мощности передние выводы вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с четырьмя или шестью авторотирующими их несущими винтами.
Кроме того, с целью исключения валов трансмиссии турбоэлектрическая силовая установка, выполненная по параллельно-последовательной гибридной технологии силового привода, снабжена как двумя левой и правой передними мотогондолами с электромоторами, имеющими между собой одинаковые по пиковой мощности типоразмеры и врашательно связанными посредством муфт сцепления с редукторами соответствующих больших винтов, так и задними поворотными мотогондолами с электромоторами, имеющими между собой одинаковые и в сумме меньшие по пиковой мощности типоразмеры, равной 35% от суммы пиковых мощностей двух передних мотогондол, и вращательно связанными посредством муфты сцепления с редуктором ЗМВ, но и оснащена в передних окончаниях разнесенных балок двумя левой и правой гибридными мотогондолами, выполненными с меньшей по взлетной мощности типоразмером, равным 65% от суммы пиковых мощностей двух передних мотогондол, и каждая из них, снабженная наряду с турбовинтовым двигателем (ТВД), передающим крутящий момент на входной вал обратимого электромотора-генератора (ОЭМГ). выходной вал которого вращательно связан с редуктором меньшего винта, имеет входную, но и выходную муфты сцепления, установленные на соответствующих валах соответственно между ТВД и ОЭМГ, но и между последним и редуктором меньшего винта и снабжена системой электропривода, включающей все электромоторы, аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи и программируемым системно-логическим контроллером, получающим от датчиков скорости полета и уровня зарядки аккумуляторов при падении ее до 25% от ее максимума, выдает управляющие сигналы на выполнение при этом соответственно подключение/отключение соответствующих электромоторов в передних мотогондолах и переключение генерирующей мощности и порядок подзарядки аккумуляторов от одного/каждого ОЭМГ, который в режиме электрогенератора как при полетной конфигурации крылатого автожира, так и на стоянке обеспечивает поочередно два способа генерации мощности в одной/двух гибридных мотогондолах или от внешнего, или от внутреннего источника энергии соответственно от набегающего воздушного потока/ветра или от ТВД при авторотирующих меньших несущих винтах, отключенных от ОЭМГ как при авторотации, так и останове меньших несущих винтов соответственно, при этом каждая входная и выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением, расцеплением вала ОЭМГ с выходным и входным валом соответственно ТВД и редуктора меньшего винта, позволяют реализовать в каждой гибридной мотогондоле два способа работы ТВД и три ОЭМГ, работающего в режиме и/или электромотора, но и электрогенератора, соответственно при совместной передаче их взлетной и пиковой мощности на меньший винт при выполнении ВВП или самостоятельной передачи как пиковой, так и номинальной мощности ОЭМГ на вал меньшего винта в случае отказа как двух ТВД, так и двух последних с двумя электромоторами больших передних винтов и продолжение полета соответственно и как электровертолета при аварийной вертикально-посадочной, так и крейсерской полетной конфигурации как крылатого электроавтожира, но и самостоятельной работы ТВД при распределенной передаче его номинальной мощности и на вал ОЭМГ, работающего в режиме электрогенератора, и на вал меньшего винта, обеспечивающего после выполнения КВП горизонтальный скоростной полет в перегрузочном варианте.
Благодаря наличию этих признаков, позволяющих выполнить многовинтовой преобразуемый беспилотный вертолет (МПБВ) с двухкилевым оперением и разноуровневыми высокорасположенными крыльями Х-образной стреловидности, имеющими концевые хорды, расположенные впереди и сзади по потоку относительно совмещенных в плане их корневых хорд соответственно первого обратной и второго крыла прямой стреловидности, образующие соответствующими их консолями X-образное крыло, смонтированное так, что в центре масс расположена точка пересечения линий ¼ хорд каждого крыла и концепции разнесенного расположения на консолях крыльев и на конце задних крыльевых удлиненных гондол шестивинтовой системы с распределенной тягой разновеликих винтов (РТРВ) по схеме 2+4, которая наряду двух толкающих ЗМВ, смонтированных на поворотных редукторах удлиненных гондол, имеющих диаметры, определяемые по формуле:  , м (где D и d - диаметры больших и меньших винтов соответственно), оснащена большими винтами, смонтированными с передними их редукторами на передних пилонах первого крыла и снабжена на смонтированном выше последнего втором крыле двумя задними меньшими винтами, размещенными с их редукторами на задних пилонах второго крыла, и выполнен с возможностью преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, обеспечивающей вращение всех винтов без взаимного их перекрытия как в передней и задней, так и в левой и правой группе несущих винтов, выполненных многолопастными без автоматов перекоса их лопастей и имеющих при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов, в полетную конфигурацию винтокрыла или крылатого автожира с двухвинтовой движительной системой, создающей ЗМВ маршевую тягу для скоростного полета после короткого взлета в перегрузочном его варианте на 20 и 10% больше от нормального взлетного веса соответственно при вращающихся от двигателей и от набегающего воздушного потока двух передних с двумя задними авторотирующими винтами, но и обратно. Система трансмиссии турбодизельной СУ, включая наряду с двухуровневым крестообразным в плане главным редуктором, передающим взлетную мощность от ТДД к передней и задней группе несущих винтов посредством соответственно нижних и верхних соединительных валов, проходящих внутри соответствующих консолей Х-образного крыла, имеющих с валами для ЗМВ общую длину в 1,97 раза больше, чем с сопоставимым по грузоподъемности беспилотным вертолетом мод, Boeing А160, обладающего в 2,53 раза худшей топливной эффективностью, чем у МПБВ. При этом он снабжен в каждом конечном положении поворота толкающих ЗМВ при создании ими вертикальной или горизонтальной тяги возможностью осуществлять управление по курсу или по тангажу и крену, а на переходных режимах полета обеспечивать ускоренный их поворот вниз или обратно вверх при нулевом угле установки их лопастей после или до создания четырьмя несущими винтами соответственно авторотирующей или подъемной тяти. В гибридной СУ во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение заряда литиево-ионных полимерных аккумуляторов снизится до 25% от его максимума система управления автоматически в каждой гибридной мотогондоле отключит выходной муфтой сцепления редуктор меньшего винта от ОЭМГ, установит его лопасти для авторотации и включит ТВД, который будет вращать ОЭМГ, обеспечивающий подзарядку аккумуляторов в полетной конфигурации крылатого автожира. При этом увеличение генерирующей мощности для электропитания может обеспечиваться также и в каждой гибридной мотогондоле, ОЭМГ которой, работая при крейсерском полете в режиме электроветрогенератора, получает вращение от меньшего несущего винта, что предопределяет авторотацию при его обдувке от набегающего потока, а величина возникающей при этом отрицательной тяти не будет значительной, так как лопасти меньшего винта установлены регулятором не на минимальный угол, потому что при дальнейшем полете без изменения скорости меньший винт будет авторотировать на оптимальном числе оборотов и под контролем регулятора оборотов. При авторотации срыв потока на лопастях несущих винтов отодвигается на более высокие скорости полета, что позволит получить скорости полета 435-465 км/ч. Все это позволит повысить скороподъемность, высоту и дальность полета, а также достичь весьма малошумной гибридной СУ, имеющей ряд способов подзарядки аккумуляторов, что обеспечит при равномерном распределении заряда аккумуляторов возможность работы электромоторов и ТВД без пиковых перегрузок и при минимальной акустической сигнатуре. Кроме того, это позволит упростить систему управления электроприводами, но и повысить безопасность полетов и использовать ТВД меньших габаритов в его поперечнике, что уменьшит мидель каждой гибридной мотогондолы и ширину обтекателя гибридной мотогондолы и, следовательно, предопределит меньшее затенение соответствующего меньшего несущего винта при вертикальном взлете, посадке и висении. Это позволит также увеличить скорость и дальность полета, полезную нагрузку и весовую отдачу, но и повысить транспортную и топливную эффективность.
, м (где D и d - диаметры больших и меньших винтов соответственно), оснащена большими винтами, смонтированными с передними их редукторами на передних пилонах первого крыла и снабжена на смонтированном выше последнего втором крыле двумя задними меньшими винтами, размещенными с их редукторами на задних пилонах второго крыла, и выполнен с возможностью преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, обеспечивающей вращение всех винтов без взаимного их перекрытия как в передней и задней, так и в левой и правой группе несущих винтов, выполненных многолопастными без автоматов перекоса их лопастей и имеющих при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов, в полетную конфигурацию винтокрыла или крылатого автожира с двухвинтовой движительной системой, создающей ЗМВ маршевую тягу для скоростного полета после короткого взлета в перегрузочном его варианте на 20 и 10% больше от нормального взлетного веса соответственно при вращающихся от двигателей и от набегающего воздушного потока двух передних с двумя задними авторотирующими винтами, но и обратно. Система трансмиссии турбодизельной СУ, включая наряду с двухуровневым крестообразным в плане главным редуктором, передающим взлетную мощность от ТДД к передней и задней группе несущих винтов посредством соответственно нижних и верхних соединительных валов, проходящих внутри соответствующих консолей Х-образного крыла, имеющих с валами для ЗМВ общую длину в 1,97 раза больше, чем с сопоставимым по грузоподъемности беспилотным вертолетом мод, Boeing А160, обладающего в 2,53 раза худшей топливной эффективностью, чем у МПБВ. При этом он снабжен в каждом конечном положении поворота толкающих ЗМВ при создании ими вертикальной или горизонтальной тяги возможностью осуществлять управление по курсу или по тангажу и крену, а на переходных режимах полета обеспечивать ускоренный их поворот вниз или обратно вверх при нулевом угле установки их лопастей после или до создания четырьмя несущими винтами соответственно авторотирующей или подъемной тяти. В гибридной СУ во время крейсерского полета увеличение генерирующей мощности для электропитания, когда падение заряда литиево-ионных полимерных аккумуляторов снизится до 25% от его максимума система управления автоматически в каждой гибридной мотогондоле отключит выходной муфтой сцепления редуктор меньшего винта от ОЭМГ, установит его лопасти для авторотации и включит ТВД, который будет вращать ОЭМГ, обеспечивающий подзарядку аккумуляторов в полетной конфигурации крылатого автожира. При этом увеличение генерирующей мощности для электропитания может обеспечиваться также и в каждой гибридной мотогондоле, ОЭМГ которой, работая при крейсерском полете в режиме электроветрогенератора, получает вращение от меньшего несущего винта, что предопределяет авторотацию при его обдувке от набегающего потока, а величина возникающей при этом отрицательной тяти не будет значительной, так как лопасти меньшего винта установлены регулятором не на минимальный угол, потому что при дальнейшем полете без изменения скорости меньший винт будет авторотировать на оптимальном числе оборотов и под контролем регулятора оборотов. При авторотации срыв потока на лопастях несущих винтов отодвигается на более высокие скорости полета, что позволит получить скорости полета 435-465 км/ч. Все это позволит повысить скороподъемность, высоту и дальность полета, а также достичь весьма малошумной гибридной СУ, имеющей ряд способов подзарядки аккумуляторов, что обеспечит при равномерном распределении заряда аккумуляторов возможность работы электромоторов и ТВД без пиковых перегрузок и при минимальной акустической сигнатуре. Кроме того, это позволит упростить систему управления электроприводами, но и повысить безопасность полетов и использовать ТВД меньших габаритов в его поперечнике, что уменьшит мидель каждой гибридной мотогондолы и ширину обтекателя гибридной мотогондолы и, следовательно, предопределит меньшее затенение соответствующего меньшего несущего винта при вертикальном взлете, посадке и висении. Это позволит также увеличить скорость и дальность полета, полезную нагрузку и весовую отдачу, но и повысить транспортную и топливную эффективность.
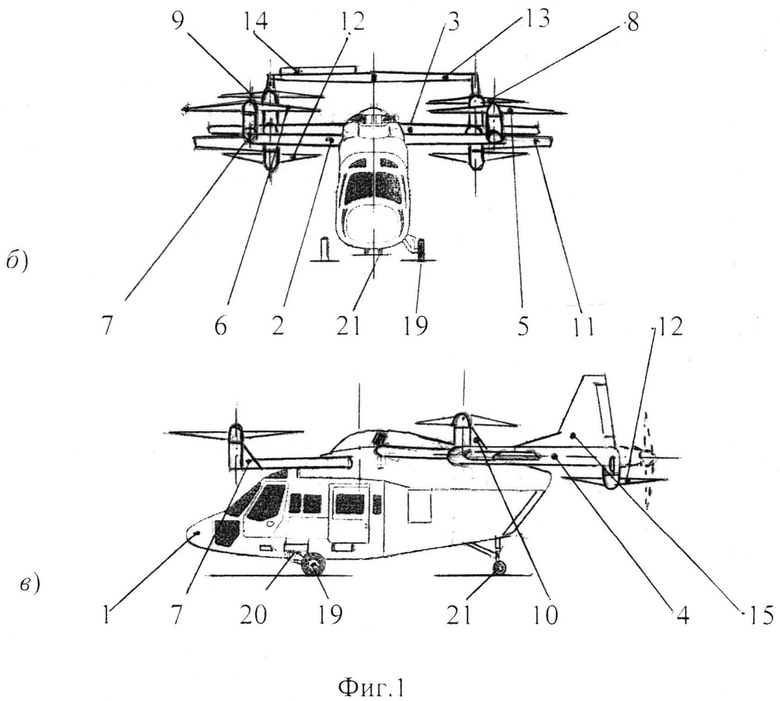
Предлагаемое изобретение многовинтового преобразуемого беспилотного вертолета и варианты возможного его использования в условиях различной полетной конфигурации иллюстрируются общими видами, представленными на фиг.1.
На фиг.1 изображен турбодизельный МПБВ исполнения РТРВ-Х2+4 на общих видах сверху, спереди и сбоку соответственно а), б) и в) с расположением двух передних больших и двух задних меньших несущих винтов на консолях Х-образного крыла и двух задних поворотных ЗМВ для различных вариантов его использования:
а) в полетной конфигурации крылатого автожира и вертолета с условным расположением на конце крыльевых гондол поворотных толкающих ЗМВ, работающих при создании ими маршевой горизонтальной или подъемной вертикальной тяги;
б) в полетной конфигурации вертолета шестивинтовой несущей схемы РТРВ-Х2+4 с двумя парами разновеликих больших и меньших несущих винтов, размещенных соответственно на консолях первого обратной и второго прямой стреловидности крыльев, и двумя толкающими поворотными ЗМВ на конце крыльевых гондол;
в) в полетной конфигурации крылатого автожира или винтокрыла с четырехвинтовой несущей схемой для создания подъемной силы совместно с Х-образным в плане крылом и маршевой тягой, создаваемой двумя поворотными толкающими ЗМВ.
Турбодизельный МПБВ, представленный на фиг.1, содержит фюзеляж-гондолу 1 и разноуровневые высокорасположенные консоли Х-образного крыла небольшого удлинения, первое крыло 2 последнего обратной смонтировано ниже второго крыла 3 прямой стреловидности, имеющего разнесенные удлиненные гондолы 4 образуют разнонаправленную Х-образную стреловидность. Концепция разнесенного расположения на консолях Х-образного крыла шестивинтовой системы с распределенной тягой разновеликих винтов по схеме 2+4 предопределяет наименьшую длину валов трансмиссии и позволяет наряду двух несущих больших левого 5 и правого 6 винтов, смонтированных с их редукторами на передних пилонах 7 первого крыла 2, иметь на втором крыле 3 два меньших винта, левый 8 и правый 9 из которых размещены с их редукторами на задних пилонах 10. На конце крыльевых гондол 4 смонтированы обтекатели с внешними консолями стабилизатора 11 и поворотными редукторами ЗМВ 12. П-образное оперение, смонтированное на разнесенных гондолах 4 совместно с пилонами 10 к консолям второго крыла 3, имеет большого удлинения горизонтальное оперение 13 с рулями высоты 14, трапециевидные кили 15 с рулями направления. Консоли первого крыла 2 обратной и второго крыла 3 прямой стреловидности с углом стреловидности соответственно по линии ¼ хорд χ1/4=-45° и χ1/4=+45° оснащены по всему их размаху закрылками 16, а второе крыло к внутренним закрылкам 16 снабжено внешними закрылками 17. Все закрылки 16-17 отклоняются на угол 20° автоматически, в зависимости от скорости и высоты полета. Во время аварийной посадки на режиме авторотации передней 5, 6 и задней 8, 9, 12 группы несущих винтов для разгрузки Х-образного крыла закрылки 16 и 17 автоматически отклоняются на угол 40°, а при выполнении вертикального взлета/посадки и висения для уменьшения потерь в вертикальной их тяге - на угол 75°. На вертолетных режимах полета парирование реактивного момента, образуемого от передних 5, 6 и задних 8, 9 и 12 несущих винтов различного диаметра, обеспечивается при противоположном направлении вращения между винтами левой и правой групп с обеспечением одинакового направления вращения между диагонально расположенными группами винтов как переднего левого 5 и задних правых 9, 12, так и переднего правого 6 и задних левого 8, 12, имеющих при виде сверху направление вращение соответственно как по часовой стрелке, так и против (см. фиг.1а). Имеется согласование совместной работы системы путевого и продольного управления соответственно при висении и переходных режимах полета, но и выполнении технологии КВП с учетом соответствующего поворота редукторов ЗМВ 12 на крыльевых гондолах 4, включая и ускоренного, но и рулей высоты 14.
Турбодизельная СУ, состоящая из двух мотогондол 18, в каждой из которых имеется высотный ТДД, рассчитанный на работу при его размещении за двухуровневым крестообразным в плане главным редуктором, выполнены для отбора их взлетной мощности с передним выводом вала. Каждый из последних, образуя с соответствующим соединительным валом и главным редуктором синхронизирующую систему, снабжен муфтами свободного хода и сцепления (на фиг.1 не показаны). Избыточная тяговооруженность двух ТДД турбодизельной СУ, обеспечивающая продолжение полета при одном работающем ТДД и любом промежуточном положении поворотных редукторов ЗМВ 12 на удлиненных гондолах 4 крыла 3 при вращении двух задних меньших винтов 8, 9 и двух больших передних 5, 6 несущих винтов во время переходного режима, что создает возможность осуществления полета и аварийной посадки, что, тем самым, повышается безопасность выполнении полетов. Передача взлетной мощности от ТДД к передней 5, 6 и задней группе 8, 9, 12 несущих винтов посредством соответственно нижних и верхних соединительных валов, проходящих внутри соответствующих консолей Х-образного крыла, связывающих как пару больших несущих винтов 5, 6 первого крыла 2 через два передних угловых редуктора, так и пару задних меньших винтов 8, 9, но и пару поворотных ЗМВ 12 второго крыла 3 через два угловых двухпоточных редуктора, обеспечивающих перегибы соответственно как в вертикальной плоскости, так и в вертикальной плоскости, но и горизонтальной плоскости соединительных валов, проходящих в консолях и поворотных его редукторах ЗМВ 12 (на фиг.1 не показаны). Трехопорное убирающееся колесное шасси, главные боковые опоры с колесами 19 убираются в передние бортовые отсеки 20 фюзеляжа 1, в заднюю его нишу - вспомогательная опора с мотор-колесом 21.
Управление турбодизельным МПБВ обеспечивается общим и дифференциальным изменением шага несущих винтов двух больших передних левого 5 и правого 6 и меньших двух левого 8 и правого 9 с двумя ЗМВ 12 и отклонением рулевых поверхностей: внешних консолей стабилизатора 11 задних гондол 4, рулей высоты 14 и направления, расположенных на разнесенных трапециевидных килях 15. При крейсерском полете подъемная сила создается Х-образным крылом, горизонтальная тяга - задними ЗМВ 12, на режиме висения только винтами 5, 6 и 8, 9, 12 на режиме перехода - крыльями 2 и 3 с винтами 5, 6 и 8, 9, 12. При переходе к вертикальному взлету-посадке (висению) закрылки 16-17 Х-образного крыла отклоняются на максимальные их углы синхронно с поворотов задних ЗМВ 12 от горизонтального положения, отклоняясь вниз, устанавливаются вертикально (см. фиг.1в). При переходе с горизонтального режима полета на режим висения и если возникает момент тангажа (Mz), то он парируется отклонением рулей высоты 14, создающих, работая в зоне обдува задних ЗМВ 12, парирующую силу. После установки поворотных ЗМВ 12 в вертикальное положение вдоль линии вертикальной их тяги и создание подъемной тяги с передними 5, 6 и задними 8, 9 несущими винтами обеспечиваются вертолетные режимы полета. С приближением к поверхности земли (палубы корабля) и полете вблизи них несущие винты передние 5, 6 и задние 8, 9 с ЗМВ 12, имея взаимно противоположное их вращение между соответствующими винтами левой и правой групп при одинаковом направлении вращения между диагонально расположенными группами винтов (см. фиг.1а), обеспечивающими путевое управление с декомпенсацией реактивного момента от ЗМВ 12 при повышении эффективности всех несущих винтов. Поворотные задние ЗМВ 12 отклоняются от горизонтального положения вниз в вертикальное на угол +90° и вниз на угол +45° соответственно при вертикальном взлете (посадке) и взлете с коротким разбегом (посадке с коротким пробегом) МПБВ на вертолетных и винтокрылых режимах его полета на взлетно-посадочных режимах в перегрузочном варианте с максимальным взлетным весом. При этом маневрирование турбодизельных МПБВ тяжелого класса с взлетным весом от 1,98 до 3,3 тонн на аэродроме и его разгон до 50 км/ч на режимах укороченного взлета обеспечивается от заднего мотор-колеса 19. Для соответствующей посадки скоростного МПБВ на поверхность земли (палубы корабля) используются колеса 19 и 21, убирающегося трехопорного шасси.
При висении на вертолетных режимах полета продольное управление МПБВ осуществляется изменением шага винтов передней 5, 6 группы и задней группы 8, 9, 12, путевое управление - изменением крутящих моментов каждой диагональной группы винтов, имеющих одинаковое направление вращения несущих винтов, например, переднего правого 6 с левыми задними винтами 8, 12 и задних несущих винтов правых 9, 12 с левым передним винтом 5. Поперечное управление обеспечивается изменением шага левой группы несущих винтов 5 с 8, 12 и правой группы несущих винтов 6 с 9, 12 осуществляющих поперечную балансировку при одновременном изменении шага винтов этих групп. Отсутствие при висении перекрытия передних 5, 6 и задних 8, 9 винтов с ЗМВ 12 также снижает вредное взаимовлияние и повышает их заполнение, что, в свою очередь, значительно уменьшает проблему срыва потока. После вертикального взлета и набора высоты для перехода на крейсерский режим полета поворотные ЗМВ 12 синхронно устанавливаются в горизонтальное положение (см. фиг.1б). После чего убираются закрылки 16-17 и производится крейсерский скоростной полет, при котором путевое управление обеспечивается рулями направления килей 15. Продольное и поперечное управление осуществляется синфазным отклонением рулей высоты 14 и дифференциальным - внешних консолей стабилизатора 11 крыльевых гондол 4 соответственно. На крейсерских режимах скоростного полета МПБВ при создании горизонтальной тяги его винты, толкающие ЗМВ 12, несущие передние 5, 6 и задние 8, 9 имеют взаимно противоположное их вращения в каждой левой и правой группе винтов и, тем самым, соответственно увеличивают КПД несущих винтов, устраняют гироскопический эффект и обеспечивают более плавное обтекание крыльев 2 и 3 и весьма повышают эффективность движительной и несущей групп винтов. При его полетной конфигурации вертолета с шестивинтовой несущей схемы реактивные моменты с учетом работы несущих поворотных ЗМВ 12 от левой и правой групп винтов, используемых как несущие винты, компенсируются полностью за счет также взаимно противоположного их вращения в соответствующих группах.
Таким образом, турбодизельный МПБВ, имеющий передние и задние несущие винты на консолях Х-образного крыла, двухкилевое оперение, представляет собой гибридный скоростной вертолет двухбалочной схемы исполнения РТРВ-Х2+4. Поворотные флюгерно-реверсивные толкающие ЗМВ, создающие вертикальную и соответствующим отклонением горизонтальную тягу, обеспечивают необходимые управляющие моменты и уменьшение дистанции при посадке с пробегом. Причем первое меньшее крыло находится спереди второго и оба, создавая дополнительную подъемную силу, разгружают несущие винты, что и предопределяет наравне с высокой тяговооруженностью СУ возможность легко реализовать и выполнение технологии ВВП и КВП, но и КВВП. Последнее, весьма важно при корабельном базировании и, особенно, палубных МПБВ, так как обеспечивает короткий взлет (достаточно и 15-30 м) с максимальным его весом и вертикальную его посадку пустого на палубу корабля.
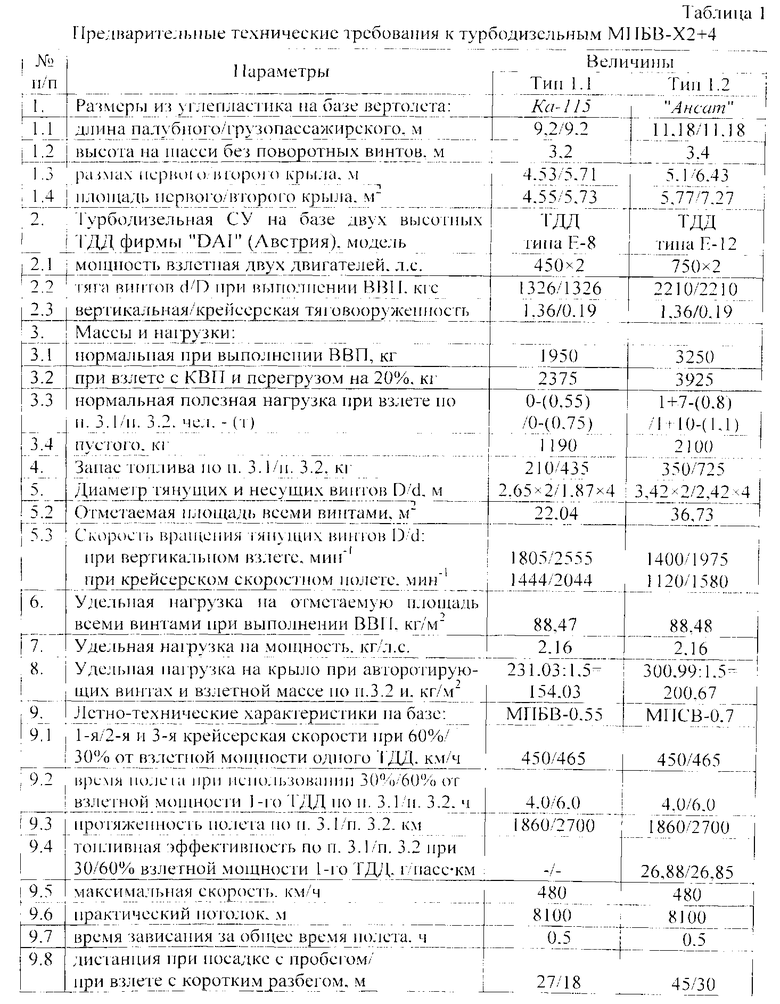
В настоящее время известно, что конструктивно-силовая схема с Х-образным крылом обеспечивает максимальную разгрузку несущих винтов и фюзеляжа от действия аэродинамических и массовых сил, а шестивинтовые вертолеты, что они устойчивы и управляемы, то, следовательно, все они пригодны для дальнейших инженерных приложений, могут и должны являться предметом их исследования и усовершенствования. Поэтому дальнейшие исследования по созданию МПБВ и многовинтовых преобразуемых скоростных вертолетов (МПСВ) исполнения РТРВ-Х2+4, используя вышеназванные преимущества, позволят освоить широкое их семейство (см. табл.1).
Поскольку, осваивая эти гибридные МПБВ и МПСВ, созданные по концепции распределенной тяги разновеликих винтов по схеме РТРВ-Х2+4, смонтированных на высокорасположенных консолях Х-образного крыла, особенно с использованием прорывной параллельно-последовательной гибридной технологии в мотогондолах с ТВД и ОЭМГ, то две пары трехвинтовых левого и правого модулей с несущими винтами создают своеобразное кольцо тяги с центром тяжести в центре масс. Это позволит соответственно увеличить подъемную силу, уменьшить длину соединительных валов трансмиссии или вообще их исключить в турбоэлектрическом МПБВ, выполненном по многодвигательной схеме, обеспечить выполнение технологии ВВП и КВП при неожиданной потере мощности гибридной СУ, особенно с одновременным отказом двух ТВД и их же с двумя ОЭМГ соответственно, что весьма повышает живучесть, делая его практически идеальным, что архиважно для скоростных МПБВ и МПСВ палубного и городского базирования на имеющихся вертолетных площадках.
Наиболее актуальным в современных условиях для этих целей является на базе вертолета мод. Ка-115 освоение турбоэлектрического МПБВ с взлетным весом 1950 и 2375 кг и для перевозки 0,55 и 0,75 т груза с дальностью полета до 1860 и 2700 км соответственно при выполнении ВВП и КВП. Гибридная его СУ, включающая четыре электромотора и два ОЭМГ суммарной пиковой/номинальной мощности соответственно 468/258 кВт и 106/58 кВт, имеет два генераторных высотных ТВД (типа ВК-60), которые могут предоставить еще 88 кВт (120 л.с). Одновременный отказ двух ТВД и их же с двумя ОЭМГ позволит выполнить ВВП и КВП соответственно. При благоприятных погодных условиях литиевая батарея позволит скоростному МПБВ-0,55 улететь на расстояние до 478 км при 2-й крейсерской скорости 465 км/ч. Однако при падении ее заряда до 25% от максимального значения включатся ТВД и будут в полете, вращая ОЭМГ, подпитывать аккумуляторы. Топливный его бак при выполнении ВВП вмещает 210 кг топлива, что эквивалентно дополнительным 1382 км и позволит при выполнении ВВП достичь дальности полета до 1860 км. Поэтому только турбоэлектрические МПБВ и МПСВ с многодвигательной СУ и гибридной параллельно-последовательной технологией могут также обеспечить и достижение времени крейсерскою их полета не менее 4 и 6 часов соответственно при выполнении ВВП и КВП.
Очевидно, освоение МПБВ и МПСВ с улучшенными тактико-техническими показателями для авиатранспорта в современных условиях - задача многоплановая и не является технически неразрешимой. Поэтому в процессе дальнейшего развития винтокрылой авиации для труднодоступной местности, широко использующей сейчас вертолеты одновинтовой схемы, самой жизнью будет продиктована задача их освоения, которая достаточно просто и технически реализуема на базе имеющихся вертолетов. Теперь уже нет сомнений только турбоэлектрические МПБВ и МПСВ исполнения РТРВ-Х2+4- это реальное и очень близкое будущее деловой и специальной авиации, но и одно из возможных направлений развития авиационной техники и электрических вертолетно-винтокрылых комплексов на их базе, имеющих при выполнении ВВП/КВП топливную экономичность 26,88/26,85 г/пасс·км, что позволит достойно конкурировать с корпорацией IAI (Израиль) и фирмой "AgustaWestland" (Италия).
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2548304C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| МНОГОВИНТОВОЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2014 |
|
RU2568517C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| АВИАТРАНСФОРМЕР, ПРЕОБРАЗУЕМЫЙ В АВТОМОБИЛЬ | 2016 |
|
RU2650257C1 |
| ЛЕГКИЙ КОНВЕРТИРУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2579235C1 |
| КРИОГЕННЫЙ ЭЛЕКТРИЧЕСКИЙ ВЕРТОЛЕТ-САМОЛЕТ | 2013 |
|
RU2529568C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| ТЯЖЕЛЫЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ (ВАРИАНТЫ) | 2012 |
|
RU2492112C1 |
Изобретение относится к области авиационной техники, в частности к конструкциям беспилотных и скоростных вертолетов. Многовинтовой преобразуемый беспилотный вертолет снабжен системой распределенной тяги разновеликих винтов по схеме Х2+4, имеющей два больших, два меньших несущих и два поворотных толкающих винта, расположенных на консолях Х-образного крыла и на конце удлиненных крыльевых гондол соответственно. Вертолет представляет собой моноплан с высокорасположенным крылом, содержит короткий фюзеляж, силовую установку, включающую двигатель и задний редуктор со спаренными поворотными соосными винтами, обеспечивающими горизонтальную, вертикальную или наклонную тягу, трехстоечное убирающееся колесное шасси. Вертолет выполнен с разноуровневыми небольшого удлинения крыльями Х-образной стреловидности, имеющими концевые хорды, расположенные впереди и сзади по потоку относительно их корневых хорд. Винтовая система оснащена большими винтами, смонтированными с их редукторами на пилонах первого крыла и снабжена на смонтированном выше втором крыле двумя меньшими винтами. Вертолет выполнен с возможностью преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы в винтокрыл или крылатый автожир с двухвинтовой движительной системой. Достигается увеличение весовой отдачи, уменьшение потребной мощности на продольную балансировку при висении, упрощение путевой, поперечной и продольной управляемости. 1 з.п. ф-лы, 1 ил.
1. Многовинтовой преобразуемый беспилотный вертолет, представляющий собой моноплан с высокорасположенным крылом, содержит короткий фюзеляж, силовую установку, включающую двигатель и задний редуктор со спаренными соосными винтами, обеспечивающими горизонтальную тягу и соответствующим их отклонением на удлиненных поворотных валах между балок П-образиого оперения вертикальную или наклонную тягу, трехстоечное убирающееся колесное шасси, отличающийся тем, что он снабжен крыльями с разнонаправленной Х-образной стреловидностью, концевые хорды которых, расположенные впереди и сзади по потоку относительно совмещенных в плане их корневых хорд соответственно первого крыла обратной и второго крыла прямой стреловидности, образованные по линии четвертей их хорд и вдоль сторон вертикальных продольных и поперечных углов, имеющих вершину, расположенную в центре масс, и выполнен по концепции разнесенного расположения на консолях крыльев шестивинтовой системы с распределенной тягой разновеликих винтов по схеме 2+4, которая наряду двух несущих больших винтов, смонтированных с их редукторами на пилонах, размещенных на законцовках первого крыла, снабжена на смонтированном выше последнего втором крыле двумя меньшими несущими винтами, смонтированными с их редукторами на задних пилонах, размещенных между внутренними и внешними закрылками второго крыла и смонтированных совместно с его крыльевыми удлиненными гондолами, оснащенными на их концах двумя поворотными редукторами с задними меньшими винтами, имеющими возможность их свободного вращения как за соответствующим трапециевидным вертикальным килем, снабженным внешними консолями большого удлинения разнесенного стабилизатора, смонтированного по внешним бортам обтекателей поворотных редукторов удлиненных гондол, так и под последними, при этом все трапециевидные пилоны на двух крыльях, снабженных по всему размаху их консолей закрылками, уменьшающими при их максимальном отклонении общие потери на 11% в вертикальной тяге всех консольных несущих винтов, имеющие в их поперечнике каплевидную удобообтекаемую форму, смонтированы так, что их продольные оси размещены параллельно плоскости симметрии, каждый поворотный редуктор удлиненной гондолы с задним меньшим винтом (ЗМВ), имеющий узел его поворота, поперечная ось которого направлена перпендикулярно к плоскости симметрии, смонтирован на конце удобообтекаемой гондолы, что позволит как уменьшить потери вертикальной их тяге, так и обеспечит при создании им маршевой тяги боковой подсос воздушного потока и его направления вдоль соответствующего борта фюзеляжа-гондолы под каждую пару большего и меньшего винтов в левой и правой группе несущих винтов, создающих при их авторотации и скоростном горизонтальном полете асимметричную подъемную силу, составляющую в сумме 50% от общей подъемной силы, создаваемой разновеликими крыльями, компенсирующими данную асимметрию, но и снабжен возможностью преобразования его полетной конфигурации с вертолета шестивинтовой несущей схемы, обеспечивающей вращение всех винтов без взаимного их перекрытия как в передней и задней, так и в левой и правой группе винтов, выполненных без автоматов перекоса их лопастей и имеющих при этом от всех несущих винтов полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между соответствующими винтами левой и правой групп с обеспечением одинакового направления вращения между диагонально расположенными группами винтов как переднего левого и двух правых задних, так и переднего правого и двух левых задних, имеющих при виде сверху направление вращение соответственно как по часовой стрелке, так и против, и устраняющих гироскопический эффект и создающих более плавное обтекание крыльев воздушным потоком от винтов, в полетную конфигурацию крылатого автожира или винтокрыла с двухвинтовой движительной системой, создающей ЗМВ маршевую тягу для скоростного крейсерского полета с обеспечением как третьей большей, так и второй или первой меньшей скорости соответственно после как вертикального, так и короткого взлета в перегрузочном его варианте на 10 или 20% больше от нормального взлетного веса при вращающихся двух передних с двумя задними несущими винтами при их авторотации или на режиме, близком к их самовращению соответственно от набегающего воздушного потока или от одного из работающих двигателей, выдающего 30 или 60% от взлетной его мощности, которые передаются соответственно полностью на ЗМВ или пополам на два последних и на четыре несущих винта, но и обратно, поворотные редукторы удлиненных гондол двух ЗМВ, имеющих электромеханические приводы, обеспечивающих диапазон их поворота с соответствующей внешней консолью стабилизатора на положительные углы ее атаки (α1ст) от 0° до +90°, снабжен возможностью ускоренного их синхронного совместного отклонения и от вертикально расположенной каждой внешней консоли стабилизатора при висении как синфазного их поворота на угол α2ст=±15° назад и вперед по полету соответственно для поступательного горизонтального полета вперед и назад, но и возможности зависания на месте при встречном и попутном ветре соответственно, так и дифференциального их поворота на угол α2ст=±15° назад/вперед - для сверхманевренного управления по курсу с декомпенсацией реактивного момента от работы несущих винтов, и от горизонтально расположенной каждой внешней консоли стабилизатора при создании ЗМВ маршевой тяги для скоростного горизонтального полета как синфазного, так и дифференциального их поворота на угол α2ст=±15° вверх и вниз но полету соответственно для сверхманевренного управления как но тангажу, так и крену, но и при синфазном их отклонении вниз от 0° до +15° и ускоренного вниз от +15° до +45° для выполнения в перегрузочном варианте при полетной его конфигурации крылатого автожира или винтокрыла соответственно после разбега и технологии короткого взлета, но и в обратном порядке и технологии укороченной посадки и пробега с обеспечением при этом толкающими ЗМВ реверса их тяги, система трансмиссии, имея наряду с многопоточным двухуровневым крестообразным в плане главным редуктором, обеспечивающим передачу взлетной мощности, например, от турбодизельных двигателей (ТДД) к передней и задней группе несущих винтов посредством соответственно нижних и верхних соединительных валов, проходящих внутри соответствующих консолей Х-образной формы в плане крыла, связывающих как пару больших несущих винтов первого крыла, так и пару меньших несущих винтов, но и пару поворотных ЗМВ второго крыла через как два угловых, так и два угловых двухпоточных редуктора, обеспечивающих перегибы соответственно как в вертикальной, так и вертикальной, но и горизонтальной плоскости соответствующих соединительных валов, последние два из которых проходят соответственно в задних пилонах несущих меньших винтов и удлиненных гондолах к поворотным редукторам ЗМВ под смежным меньшим углом к линии четвертей хорд второго крыла, величина которого равновеликая половине от одного из вертикальных углов, биссектриса которого размещена по оси симметрии, и оснащен двумя входными валами, размещенными по направлению полета за центром масс и по обе стороны от оси симметрии и связанными с ТДД, имеющими для отбора их взлетной мощности передние выводы вала, каждый из последних, образуя синхронизирующую систему, снабжен муфтами свободного хода, выдающими, отключая от трансмиссии в горизонтальном скоростном полете, любой избыточный ТДД и один любой в случае его отказа или оба ТДД при их отказе, управляющий сигнал на автоматическое изменение полетной конфигурации в крылатый автожир или вертолет для аварийной посадки соответственно с четырьмя или шестью авторотирующими их несущими винтами.
2. Многовинтовой преобразуемый беспилотный вертолет по п.1, отличающийся тем, что турбоэлектрическая силовая установка, выполненная по параллельно-последовательной гибридной технологии, снабжена как двумя левой и правой передними мотогондолами с электромоторами, имеющими между собой одинаковые по пиковой мощности типоразмеры и вращательно связанными посредством муфт сцепления с редукторами соответствующих больших винтов, так и задними поворотными мотогондолами с электромоторами, имеющими между собой одинаковые и в сумме меньшие по пиковой мощности типоразмеры равной 35% от суммы пиковых мощностей двух передних мотогондол и вращательно связанными посредством муфты сцепления с редуктором ЗМВ, но и оснащена в передних окончаниях разнесенных балок двумя левой и правой гибридными мотогондолами, выполненными с меньшей по взлетной мощности типоразмером равным 65% от суммы пиковых мощностей двух передних мотогондол и каждая из них, снабженная наряду с турбовинтовым двигателем (ТВД), передающим крутящий момент на входной вал обратимого электромотора-генератора (ОЭМГ), выходной вал которого вращательно связан с редуктором меньшего винта, имеет входную, но и выходную муфты сцепления, установленные на соответствующих валах соответственно между ТВД и ОЭМГ, но и между последним и редуктором меньшего винта и включает аккумуляторные перезаряжаемые батареи, преобразователь энергии с блоком управления силовой передачи и программируемым системно-логическим контроллером, получающим от датчиков скорости полета и уровня зарядки аккумуляторов при падении ее до 25% от ее максимума, выдает управляющие сигналы на выполнение при этом соответственно подключение/отключение соответствующих электромоторов в передних мотогондолах и переключение генерирующей мощности и порядок подзарядки аккумуляторов от одного/каждого ОЭМГ, который в режиме электрогенератора как при полетной конфигурации крылатого автожира, так и на стоянке обеспечивает поочередно два способа генерации мощности в одной/двух гибридных мотогондолах или от внешнего, или от внутреннего источника энергии соответственно от набегающего воздушного потока/ветра или от ТВД при авторотирующих меньших несущих винтах, отключенных от ОЭМГ, как при авторотации, так и останове меньших несущих винтов соответственно, при этом каждая входная и выходная электромагнитные муфты сцепления, обеспечивающие дистанционное управление их сцеплением/расцеплением вала ОЭМГ с выходным и входным валом соответственно ТВД и редуктора меньшего винта, позволяют реализовать в каждой гибридной мотогондоле два способа работы ТВД и три ОЭМГ, работающего в режиме и/или электромотора, но и электрогенератора, соответственно при совместной передаче их взлетной и пиковой мощности на меньший винт при выполнении ВВП или самостоятельной передачи как пиковой, так и номинальной мощности ОЭМГ на вал меньшего винта в случае отказа как двух ТВД, так и двух последних с двумя электромоторами больших передних винтов и продолжение полета соответственно и как электровертолета при аварийной вертикально-посадочной, так и крейсерской полетной конфигурации как крылатого электроавтожира, но и самостоятельной работы ТВД при распределенной передаче его номинальной мощности и на вал ОЭМГ, работающего в режиме электрогенератора, и на вал меньшего винта, обеспечивающего после выполнения КВП горизонтальный скоростной полет в перегрузочном варианте.
| US 7874513 B1, 25.01.2011 | |||
| RU 22464951 C1, 27.11.2005 | |||
| US 2011114797 A1, 19.05.2011 | |||
| WO 2013158050 A1, 24.10.2013 | |||
| КОНВЕРТОПЛАН | 2011 |
|
RU2456209C1 |

