ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится, в общем, к приводам и, более конкретно, к способам и устройствам для диагностики клапана с использованием электрических приводов клапана.
УРОВЕНЬ ТЕХНИКИ
[0002] Регулирующие клапаны (например, клапаны с поступательным движением штока), главным образом, используют в системах управления технологическими процессами для регулирования потока технологических текучих сред. Регулирующий клапан, как правило, включает в себя привод (например, электрический привод, гидравлический привод и т.п.), который автоматизирует действие регулирующего клапана. Электрические приводы часто используют двигатель, функционально связанный с элементом регулирования потока через систему привода (например, один или больше передаточных механизмов). Во время действия, когда к двигателю подают электроэнергию, электрический привод перемещает элемент регулирования потока между закрытым положением и открытым положением, чтобы регулировать поток текучей среды через клапан. Когда клапан закрыт, элемент регулирования потока обычно выполнен с возможностью взаимодействия с уплотнением кольцевидной или кольцевой уплотняющей прокладки (например, седла клапана), расположенной внутри канала потока, для предотвращения потока текучей среды между впускным и выпускным отверстием клапана. С течением времени и при повторном использовании компоненты клапана и/или компоненты привода могут изнашиваться, что приводит к различным видам неисправностей (например, неисправность клапанного устройства, неисправность уплотнения, износ зубчатой передачи, и др.), что может понижать надежность привода, управляющего клапаном, и/или достижение клапаном герметичного уплотнения для предотвращения утечки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Раскрыты способы и устройства для диагностики клапана с использованием электрических приводов клапана. Пример устройства включает в себя электрический двигатель для приведения в действие клапана, датчики поворота для мониторинга поворота приводного вала, связанного с электрическим двигателем, для определения расстояния, пройденного приводным валом, и датчик положения клапана для мониторинга положения элемента регулирования потока клапана. Пример электрического привода клапана, кроме того, включает в себя процессор для создания предупреждающего сигнала на основе обратной связи от датчиков поворота и датчика положения клапана, при этом предупреждающий сигнал связан с неисправностью клапана.
[0004] Раскрытый в настоящем документе пример способа включает в себя текущий мониторинг расстояния, пройденного приводным валом, связанным с электрическим двигателем электрического привода клапана, используемым для управления клапаном, текущий мониторинг положения элемента регулирования потока клапана с помощью датчика положения клапана, связанного с приводом, и создание предупреждающего сигнала на основе расстояния, пройденного приводным валом, и положения элемента регулирования потока, при этом предупреждающий сигнал связан с неисправностью клапана.
[0005] Раскрытые в настоящем документе некоторые простые инструкции при их исполнении обуславливают машину по меньшей мере постоянно мониторить расстояние, пройденное приводным валом, связанным с электрическим двигателем электрического привода клапана, используемым для управления клапаном, постоянно мониторить положение элемента регулирования потока клапана с помощью датчика положения клапана, связанного с приводом, и создавать предупреждающий сигнал на основе расстояния, пройденного приводным валом, и положения элемента регулирования потока, при этом предупреждающий сигнал связан с неисправностью клапана.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] На фиг. 1 приведена схема примера электрического привода клапана, выполненного в соответствии с принципами настоящего изобретения.
[0007] На фиг. 2 приведена диаграмма, представляющая пример диапазонов перемещения для приводного вала в примере привода по фиг. 1, управляющего клапаном.
[0008] На фиг. 3 представлен пример эталонного профиля тока для не находящегося под давлением клапана при открывании и закрывании.
[0009] На фиг. 4 представлен пример эталонного профиля тока для находящегося под давлением клапана при открывании и закрывании.
[0010] На фиг. 5 приведен пример измеренного профиля тока клапана, проявляющего вероятные неисправности, в сравнении с примером эталонных профилей по фиг. 3 и 4.
[0011] На фиг. 6-7 приведены структурные схемы, представляющие пример процессов для реализации примера привода по фиг. 1.
[0012] На фиг. 8 приведена схематическая иллюстрация примера процессорной платформы, которая может быть использована и/или программируема для выполнения примера процессов по фиг. 6-7 и/или, в более общем смысле, для реализации примера привода по фиг. 1.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0013] Электрические приводы клапанов представляют собой эффективные средства для закрывания клапана. Однако когда электрический двигатель остановлен, (например, электроэнергия больше не подается), клапан может открываться, особенно когда клапан перекрывает текучую среду под высоким давлением, вследствие усилия технологической текучей среды, смещающей клапан. В некоторых случаях энергия, подаваемая к электрическим приводам клапанов, никогда не отключается, так что двигатель в приводе может поддерживать герметичное уплотнение в клапане. Однако такой подход является неэффективным и дорогостоящим, поскольку потребляет много энергии. В качестве альтернативы, некоторые электрические приводы клапанов используют пружину, например, тарельчатую пружину или тарельчатую шайбу, чтобы помочь приложению давления к седлу клапана для обеспечения надежного закрывания клапана, даже после остановки двигателя, как описано в патенте США 8408518 за авторством Шейда и др., опубликованном 2 апреля 2013 г., который включен в настоящий документ посредством ссылки в полном объеме. При закрывании клапана с использованием такого смещаемого внутри привода, после того как шток клапана устанавливается в местоположение 0% (например, полностью закрытое положение), двигатель продолжает приводить в действие шток клапана. Однако в данный момент положение клапана больше не изменяется (поскольку запорный элемент клапана уже взаимодействует с седлом клапана), но двигатель продолжает приводить пружину в состояние полного сжатия, таким образом, нагружая пружину до того как отключено питание от привода.
[0014] Хотя электрические приводы клапанов, смещаемые с помощью внутренних нагрузочных пружин, как описано выше, обеспечивают отключение питания к приводу, электрические приводы клапанов все еще создают проблемы в диагностике вероятных неисправностей как в самом клапане, так и в соответствующем приводе. Кроме того, использование внутренней нагрузочной пружины создает дополнительный источник вероятной неисправности, который может искажать правильную диагностику неисправности в клапане. В частности, неисправности в клапане могут включать в себя: (1) неисправность клапанного устройства, происходящую из-за эрозии или износа уплотняющих поверхностей запорного элемента клапана и седла клапана, что приводит к тому, что клапан не достигает расчетной способности отсечки; (2) излишнее трение клапанного устройства, которое понижает быстроту реагирования клапана и может увеличивать напряжение на приводе; (3) неисправность уплотнения, вызывающую увеличение трения в клапане из-за износа уплотнения, несовместимых материалов или неправильной регулировки уплотнения; и (4) неисправность уплотнения, вызывающую утечку (и уменьшение трения) из-за низкой нагрузки уплотнения или из-за выдавливания уплотнения. Как указано выше, в дополнение к неисправности клапана существует вероятность того, что внутренняя нагрузочная пружина привода также может терять работоспособность, или вследствие потери упругости и/или вследствие разрушения. Кроме того, зубчатая передача привода может изнашиваться с течением времени, что приводит к менее точной регулировке перемещения клапана.
[0015] Раскрытые здесь принципы обеспечивают средства для преодоления указанных недостатков путем выявления вероятности одного или больше вероятных видов неисправностей, описанных выше. Кроме того, устройства и способы, раскрытые в настоящем документе, обеспечивают средства для распознавания различных видов неисправностей, чтобы определять наиболее вероятную причину (причины) неисправности, для лучшей помощи обслуживающему персоналу в устранении таких неисправностей.
[0016] На фиг. 1 приведена схема примера электрического привода 100 клапана, выполненного в соответствии с принципами настоящего изобретения. В иллюстрируемом примере привод 100 получает энергию от внешнего источника 102 энергии для управления и мониторинга регулирующего клапана 104. В иллюстрируемом примере привод 100 включает в себя процессор или микроконтроллер 106, ведущий элемент 108 двигателя, двигатель 110, один или больше датчиков 112 поворота, датчик 114 направления, датчик 116 положения клапана, датчик 118 тока, датчик 120 напряжения, датчик 122 температуры и интерфейс 124 связи.
[0017] В иллюстрируемом примере микроконтроллер 106 получает информацию от одного или больше датчиков 112, 114, 116, 118, 120, 122 и/или внешнюю информацию через интерфейс 124 связи для мониторинга и/или управления клапаном 104. В некоторых примерах на основе полученной информации микроконтроллер 106 управляет двигателем 110 через ведущий элемент 108 двигателя для перемещения элемента регулирования потока в клапане 104. В некоторых примерах клапан 104 представляет собой клапан с поступательным движением штока. В некоторых таких примерах двигатель 110 функционально связан с приводным валом через передачу, которая преобразует поворотное движение двигателя 110 в прямолинейное движение приводного вала. В таких примерах приводной вал соединен со штоком клапана 104 таким образом, что движение двигателя 110 преобразуется в движение элемента регулирования потока. В других примерах клапан 104 представляет собой поворотный клапан, так что передача преобразует поворотное движение двигателя 110 в поворотное движение приводного вала для соответствующего поворота вала клапана, соединенного с тарелкой клапана или другим элементом клапана для открывания и закрывания клапана. Таким образом, хотя раскрытые здесь принципы первоначально описаны в связи с клапаном с поступательным движением штока, эти принципы могут также применяться к поворотным клапанам.
[0018] В некоторых примерах передача и приводной вал двигателя 110 изготовлены с жесткими уровнями допуска для точного управления расстоянием, проходимым приводным валом в линейном направлении для соответствующего числа оборотов приводного вала. В некоторых примерах привод 100 снабжен датчиками 112 поворота для мониторинга поворота приводного вала. В некоторых примерах датчики 112 поворота выполнены с бесконтактными датчиками, такими как, например, датчики Холла, оптический датчик положения и т.п. В частности, в некоторых примерах, в которых датчики 112 поворота включают датчики Холла, приводной вал двигателя 110 снабжен одним или больше магнитами, распределенными по окружности вала. Когда каждый магнит проходит мимо датчиков 112 поворота, создается сигнал или импульс, показывающий поворот приводного вала. Число датчиков 112 поворота и число магнитов, распределенных вокруг приводного вала, определяет разрешение, с которым может быть проконтролировано перемещение приводного вала (и соответствующего элемента регулирования потока в клапане 104). Например, в некоторых примерах привод 100 включает в себя три датчика поворота, а приводной вал содержит 10 магнитов. В таких примерах один полный оборот вала соответствует 30 (3×10) импульсам, полученным от датчиков поворота 112. Если предположить, что один полный оборот приводного вала соответствует 0,3 дюйма (7,62 мм) линейного перемещения приводного вала, пример привода 100 может управлять или мониторить перемещение элемента регулирования потока в клапане 104 в пределах 0,01 дюйма (0,254 мм) (0,3 дюйма/оборот ÷ 30 импульсов/оборот). Кроме того, скорость оборота двигателя 110, также можно мониторить на основе скорости, с которой поступают импульсы (в зависимости от магнитов, проходящих мимо датчиков 112 поворота). Дополнительно или альтернативно в некоторых примерах датчики 112 поворота могут быть установлены для обнаружения соответствующих магнитов в других местоположениях в передаче двигателя 110. В таких примерах соответствующее расстояние, проходимое приводным валом, определяют таким же образом, как описано выше, за исключением того, что учитывают любые передаточные отношения. Кроме того, пример привода 100 снабжен датчиком 114 направления для обнаружения направления, в котором поворачивается приводной вал, таким образом, показывая направление, в котором перемещается приводной вал и, следовательно, направление, в котором перемещается элемент регулирования потока в клапане 104.
[0019] Путем мониторинга расстояния (и направления), проходимого приводным валом двигателя 110 через датчики 112 поворота, как описано выше, может быть выведено положение клапана 104 (т.е. положение элемента регулирования потока в клапане 104). Например, положение клапана 104 может быть выведено на основе числе импульсов, полученных, когда двигатель 110 перемещает элемент регулирования потока от точки отсчета в интересующее положение. В некоторых примерах точка отсчета соответствует клапану 104 в полностью открытом положении. В таких примерах число импульсов, полученных через датчики 112 поворота, когда приводной вал закрывает клапан 104 из полностью открытого положения, может быть использовано для определения расстояния, проходимого приводным валом и, следовательно, расстояния, на которое элемент регулирования потока клапана 104 должен перемещаться, закрываясь. Аналогично, в некоторых примерах точка отсчета соответствует положению двигателя 110, когда он останавливается во время перемещения элемента регулирования потока в закрытое положение. В некоторых примерах двигатель 110 останавливается, когда клапан 104 достигает полностью закрытого положения, поскольку механическая остановка следует, когда запорный элемент клапана достигает седла клапана. В некоторых примерах положение элемента регулирования потока может быть выведено путем определения расстояния, проходимого приводным валом от положения остановки двигателя, на основе числа импульсов, полученных через датчики 112 поворота, когда клапан 104 открывается из полностью закрытого положения.
[0020] В других примерах привод 100 снабжен внутренней нагрузочной пружиной или смещающим элементом, для смещения клапана 104, когда питание отключено от примера привода 100. В некоторых примерах внутренняя нагрузочная пружина содержит тарельчатую пружину или тарельчатую шайбу. В некоторых таких примерах приводной вал двигателя 110 перемещает элемент регулирования потока в клапане 104 до полного закрывания, а затем продолжает перемещение в том же направлении за полностью закрытое положение клапана 104, для нагружения внутренней нагрузочной пружины. Соответственно, в таких примерах точка, в которой двигатель 110 останавливается, соответствует точке, в которой внутренняя нагрузочная пружина полностью сжата или полностью нагружена (например, смещающее усилие от нагрузочной пружины равно усилию, создаваемому двигателем 110). Поскольку приводной вал двигателя 110 перемещается при нагружении пружины, тогда как элемент регулирования потока клапана 104 остается неподвижным в полностью закрытом положении, положение элемента регулирования потока не может быть выведено непосредственно на основании расстояния, проходимого приводным валом (например, на основе импульсов от датчиков 112 поворота) от точки отсчета, соответствующей положению остановки двигателя 110. Однако в некоторых примерах расстояние, проходимое приводным валом от полностью закрытого положения клапана до положения остановки двигателя 110 (т.е. расстояние, проходимое до полной нагрузки внутренней нагрузочной пружины), остается постоянным с течением времени. Соответственно, в таких примерах положение элемента регулирования потока клапана 104 может быть выведено на основании расстояния, проходимого приводным валом от точки отсчета (т.е. положения остановки), меньшего фиксированного расстояния, на протяжении которого приводной вал воздействует на внутреннюю нагрузочную пружину.
[0021] В иллюстрируемом примере на фиг. 1, привод 100 также снабжен датчиком 116 положения клапана. В некоторых примерах датчик 116 положения клапана выполнен с возможностью прямого измерения положения элемента регулирования потока в клапане 104, а не выведения перемещения клапана на основе расстояния, проходимого приводным валом, определяемого числом импульсов, полученных через датчики 112 поворота. Соответственно, в некоторых примерах датчик 116 положения клапана обеспечивает избыточность при определении положения клапана 104 (т.е. положения соответствующего элемента регулирования потока). Дополнительно или альтернативно датчик 116 положения клапана и датчики 112 поворота могут быть использованы совместно для диагностики вероятных неисправностей в клапане 104.
[0022] На фиг. 2 приведена диаграмма, представляющая пример диапазонов 200, 202, 204 перемещения для приводного вала примера привода 100 по фиг. 1, управляющего клапаном (например, клапаном 104 по фиг. 1). В частности, на фиг. 2 представлен пример эталонного диапазона 200 перемещения, соответствующего приводу 100 и клапану 104, действующему в нормальных условиях (например, во время изготовления, когда клапан 104 впервые собран и откалиброван перед наступлением каких-либо состояний неисправности). Эталонный диапазон 200 перемещения и связанные расстояния, описанные более полно ниже, могут быть использованы как опорные или базисные для сравнения с работой клапана 104 с течением времени, чтобы идентифицировать вероятные неисправности на основе изменений в расстоянии, измеренном для диапазонов перемещения. На фиг. 2 представлен пример диапазона 202 перемещения при неисправности клапанного устройства, соответствующий одному из видов вероятной неисправности из-за эрозии или износа на сопрягающихся поверхностях между запорным элементом клапана и седлом клапана. На фиг. 2 также представлен пример диапазона 204 перемещения при неисправности пружины, соответствующий другому виду неисправности из-за ослабления или поломки внутренней нагрузочной пружины привода 100. Каждый из диапазонов 200, 202, 204 перемещения включает в себя соответствующий диапазон 206, 208, 210 клапана, представляющий расстояние, проходимое клапаном 104 между полностью открытым положением (например, 100%) и полностью закрытым положением (например, 0%), иногда называемым нулевым положением, соответствующим точке, в которой элемент регулирования потока в клапане 104 больше не может перемещаться в направлении закрывания. Кроме того, как показано в иллюстрируемом примере, каждый из диапазонов 200, 202, 204 перемещения включает в себя соответствующий диапазон 212, 214, 216 пружины, представляющий расстояние, проходимое приводным валом между полностью закрытым положением клапана (например, когда внутренняя нагрузочная пружина является несжатой или без какой-либо нагрузки), и точкой, когда двигатель 110 останавливается (например, когда внутренняя нагрузочная пружина полностью нагружена). В примерах, когда привод 100 не содержит внутренней нагрузочной пружины, диапазон 204 перемещения при неисправности пружины и эталонный диапазон 200 перемещения и диапазон 202 перемещения при неисправности клапанного устройства будут включать только соответствующий диапазон 206, 208 клапана, так что положение остановки двигателя 110 будет соответствовать полностью закрытому положению клапана 104.
[0023] В некоторых примерах диапазон клапана 104 (например, расстояние между полностью открытым положением и полностью закрытым положением) определяют во время изготовления, и полученное расстояние относительно точки отсчета сохраняется как эталонное расстояние, с которым может быть сравнено расстояние, проходимое клапаном 104 (опосредованно выведенное через расстояние, проходимое приводным валом), с течением срока службы клапана 104, для определения вероятной неисправности клапанного устройства (например, эрозии запорного элемента клапана и/или седла клапана вдоль поверхностей сопряжения запорного элемента и седла). Например, когда возникает эрозия клапанного устройства и износ запорного элемента клапана и/или седла клапана, образуется небольшой промежуток между запорным элементом клапана и седлом клапана, так что запорный элемент клапана перемещается дальше перед достижением полного упора седла клапана для полного закрывания клапана 104. В результате существует разность 220 между эталонным расстоянием, определяемым исходным диапазоном 206 клапана, определенным во время изготовления, и измеренным расстоянием, определяемым диапазоном 208 клапана после износа клапанного устройства из-за повторяющегося использования.
[0024] Дополнительно или альтернативно, в некоторых примерах положение клапана 104 (т.е. положение элемента регулирования потока в клапане 104) при полном закрывании выводят из расстояния, проходимого приводным валом по диапазону пружины относительно точки отсчета положения остановки двигателя 110 (например, после перемещения по полному диапазону пружины). В частности, диапазон пружины (т.е. расстояние, на которое должен переместиться приводной вал до полной нагрузки внутренней нагрузочной пружины) является независимым от диапазона клапана или какой-либо связанной неисправности клапанного устройства, поскольку приводной вал не будет начинать нагрузку внутренней нагрузочной пружины, пока элемент регулирования потока в клапане 104 не остановит перемещение (т.е. не достигнет полностью закрытого положения). То есть, как описано выше, предполагается, что диапазон пружины остается постоянным с течением времени, так что какое-либо изменение в положении элемента регулирования потока в полностью закрытом положении вследствие износа клапанного устройства (например, разность 220 между полностью закрытым положением в диапазоне 206 клапана и диапазоне 208 клапана) приводит к соответствующей разности 222 между суммарным эталонным диапазоном 200 перемещения и диапазоном 202 перемещения при неисправности клапанного устройства. Иначе говоря, как показано в иллюстрируемом примере, диапазон 212 пружины эталонного диапазона 200 перемещения эквивалентен длине диапазона 214 пружины диапазона 202 перемещения при неисправности клапанного устройства. Соответственно, при работе клапана с неисправностью клапанного устройства, после остановки двигателя 110, постоянное расстояние, соответствующее диапазону пружины, может быть вычтено из полного расстояния диапазона 202 перемещения при неисправности клапанного устройства, чтобы вывести положение клапана 104, когда он полностью закрыт. Полученное положение клапана 104 может быть сравнено с расчетным или опорным положением клапана 104 в полностью закрытом положении во время изготовления (например, соответствующим эталонному диапазону 200 перемещения) для определения разности 220. В некоторых примерах положение клапана 104 и/или соответствующих пройденных расстояний основано на числе импульсов, измеренном датчиками 112 поворота и соответствующим временем до нагрузки пружины привода 100. Таким образом, как показано в иллюстрируемом примере, число импульсов и время до нагрузки пружины во время неисправности клапанного устройства является таким же, как число импульсов и время до нагрузки пружины в нормальных условиях, за исключением того, что импульсы и время будут немного смещены относительно эталонного диапазона 200 перемещения. В некоторых примерах ток, потребляемый двигателем 110, придерживается того же профиля (описан более полно ниже в связи с фиг. 3-5) относительно как эталонного диапазона 200 перемещения, так и диапазона 202 перемещения при неисправности клапанного устройства. В некоторых примерах, когда разность 220 (или соответствующая разность 222) превышает определенное пороговое значение (например, абсолютное расстояние и/или процентное отношение от полного диапазона клапана), может быть создан сигнал тревоги или предупреждающий сигнал, чтобы информировать оператора, инженера или другой производственный персонал о вероятной неисправности клапанного устройства.
[0025] В некоторых примерах вместо определения положения элемента регулирования потока клапана 104 на основе расстояния, проходимого приводным валом, разность 220 определяют на основе прямого измерения положения элемента регулирования потока, когда клапан 104 полностью закрыт.В частности, разность 220 соответствует разности между измеренным положением элемента регулирования потока и расчетным положением элемента регулирования потока на основании опорного положения элемента регулирования потока, соответствующего полностью закрытому положению клапана 104, определенному во время изготовления (например, перед наступлением износа клапанного устройства). В некоторых примерах положение клапана 104 при полном закрывании определяют непосредственно с помощью датчика 116 положения клапана в примере привода 100. Например, независимо от того, имеется ли износ клапанного устройства, датчик 116 положения клапана может обнаруживать, когда запорный элемент клапана достигает полного упора седла клапана, поскольку элемент регулирования потока прекращает перемещение и, таким образом, обнаруживает, когда клапан 104 является полностью закрытым.
[0026] В некоторых примерах внутренняя нагрузочная пружина в примере привода 100 может начинать терять работоспособность (например, начинает терять упругость) и/или ломаться. Когда возникает указанная неисправность пружины, внутренняя нагрузочная пружина имеет меньшую возможность (например, вследствие ослабления упругости) или не имеет возможности (например, вследствие поломки пружины) надавливать на приводной вал и обеспечивать необходимое смещающее усилие. Соответственно, в некоторых указанных примерах двигатель 110 может сжимать пружину на большее расстояние, чем обычно, перед остановкой двигателя 110, как иллюстрируется разностью 224 между диапазоном 212 пружины для эталонного диапазона 200 перемещения и диапазоном 216 пружины для диапазона 204 перемещения при неисправности пружины. В некоторых указанных примерах диапазон 216 пружины, как показано на фиг. 2, включает в себя область 226 без нагрузки, в которой двигатель 110 будет перемещаться, после того как шток клапана достигает полностью закрытого положения (например, положение 0%), на определенное расстояние перед началом сжимания или нагружения пружины, вследствие неисправности пружины. В некоторых примерах расстояние, проходимое двигателем 110 по области 226 без нагрузки, отличается от разности 224 диапазона 216 пружины для диапазона 204 перемещения при неисправности пружины, по сравнению с эталонным диапазоном 200 перемещения. Таким образом, в некоторых примерах фактический диапазон перемещения двигателя 110 при нагружении пружины может быть меньше, чем диапазон 212 пружины для эталонного диапазона 200 перемещения, полный диапазон 216 пружины больше, чем диапазон 212 пружины вследствие дополнительного расстояния, проходимого двигателем 110 на протяжении области 226 без нагрузки. В других примерах внутренняя нагрузочная пружина может терять работоспособность, так что приводной вал не может сжимать пружину, что приводит к сокращению диапазона пружины. В некоторых примерах, когда разность 224 превышает определенное пороговое значение, может быть создан сигнал тревоги или предупреждающий сигнал, чтобы информировать оператора, инженера или другой производственный персонал об обнаруженной неисправности пружины. В некоторых примерах вышеописанные сценарии изменений диапазона 216 пружины относительно эталонного диапазона 212 пружины могут быть идентифицированы по изменениям профиля тока (например, таким как сдвиг по времени), потребляемого двигателем 110 при его перемещениях вдоль диапазона 204 перемещения при неисправности пружины. Пример профилей тока описан более подробно ниже в связи с фиг. 3-5.
[0027] Как показано на фиг. 2, общая длина каждого из диапазона 202 перемещения при неисправности клапанного устройства и диапазона 204 перемещения при неисправности пружины больше, чем эталонный диапазон 200 перемещения, на соответствующую разность 222, 224. Хотя разности 222, 224, соответствующие каждому из диапазонов 202, 204 перемещения при неисправности, представлены, как имеющие одинаковую длину, на фиг. 2, это не обязательно. Наоборот, поскольку неисправности и результирующие изменения до соответствующих диапазонов 202, 204 перемещения являются независимыми, разности 222, 224 могут соответствовать различным длинам. Кроме того, вероятно, что существует такая неисправность пружины и неисправность клапанного устройства, что разность между полным диапазоном перемещения клапана 104 относительно эталонного диапазона 200 перемещения представляет собой сочетание разностей 222, 224. Неисправность пружины и неисправность клапанного устройства может приводить к общему увеличению длины соответствующего диапазона перемещения. Таким образом, различие этих неисправностей друг от друга не может быть установлено, основываясь исключительно на расстоянии, проходимом приводным валом, измеряемом с помощью датчиков 112 поворота. Таким образом, в некоторых примерах, когда обнаружено изменение в диапазоне перемещения, предупреждающий сигнал может указывать, что возникает вероятность по меньшей мере одной из неисправностей, пружины или клапанного устройства, и производственный персонал может выполнить дополнительное обследование и предпринять соответствующие меры по исправлению. Однако неисправность клапанного устройства, как правило, возникает постепенно с течением времени, по мере эрозии и/или износа компонентов клапана, так что разность 222 постепенно увеличивается до тех пор, пока разность 222 не превысит заранее установленное пороговое значение. В отличие от этого, неисправность пружины, такая как поломанная пружина, может произойти внезапно, так что от одного хода клапана 104 к другому ходу разность 224 может включать значительное изменение. Соответственно, в некоторых примерах разность между расстоянием, проходимым приводным валом вдоль эталонного диапазона 200 перемещения и диапазонами 202, 204 перемещения при неисправности клапанного устройства или пружины, отслеживается с течением времени во время последовательных ходов клапана 104. В указанных примерах, если разность увеличивается постепенно, предупреждающий сигнал указывает на неисправность клапанного устройства, тогда как, если разность возрастает внезапно между последовательными ходами, предупреждающий сигнал указывает на неисправность пружины. Тогда как способность различать режимы неисправности в данном способе возможна, опираясь исключительно на обратную связь от датчиков 112 поворота, такой способ не лишен ограничений, поскольку износ клапанного устройства может возникать до внезапной неисправности пружины, но, в результате неисправности пружины, остается незамеченным, поскольку износ клапанного устройства еще не достиг порогового значения.
[0028] В некоторых примерах путаницу между неисправностью клапанного устройства и неисправностью пружины предотвращают с помощью датчика 116 положения клапана, который может непосредственно определять, когда клапан 104 достигает полностью закрытого положения (например, на основании того, когда элемент регулирования потока в клапане прекращает перемещение, будучи закрытым), чтобы, таким образом, обнаруживать какую-либо вероятную неисправность клапанного устройства. Тогда как неисправность клапанного устройства может быть обнаружена, полагаясь исключительно на датчик 116 положения клапана, датчик 116 положения клапана не может обнаруживать неисправность пружины в приводе 100. Соответственно, в некоторых примерах датчики 112 поворота и датчик 116 положения клапана используют совместно, чтобы обнаруживать, когда возникает либо неисправность клапанного устройства, либо неисправность пружины, и чтобы различать, когда возникает одна, другая или обе.
[0029] Возвращаясь к фиг. 1, пример привода 100 представлен с датчиком 118 тока и датчиком 120 напряжения для мониторинга мощности, используемой для управления двигателем 110, чтобы обеспечить дополнительные или альтернативные средства обнаружения неисправностей в клапане 104. Количество тока, потребляемое двигателем 110 для поворота вала, зависит от скорости двигателя 110, давления текучей среды в клапане 104, внутреннего трения в клапане (например, трения клапанного устройства или трения уплотнения) при перемещении элемента регулирования потока, и/или смещающего усилия внутренней нагрузочной пружины (например, когда клапан 104 находится в полностью закрытом положении). В некоторых примерах скорость двигателя 110 задается микроконтроллером 106 и, таким образом, является известной. Однако в некоторых примерах количество тока, которое может потребляться двигателем 110, ограничено, в качестве меры предосторожности, так что скорость двигателя 110 может быть меньше, чем определено микроконтроллером 106, если потребность в токе слишком высокая. В некоторых указанных примерах пониженная скорость обнаруживается путем сравнения скорости двигателя, устанавливаемой микроконтроллером 106, с фактической скоростью приводного вала, измеряемой посредством датчиков 112 поворота, как описано выше. В дополнение к скорости двигателя 110, а некоторых примерах давление текучей среды в клапане 104 также известно на основе прямого измерения посредством датчика давления в приводе 100 через интерфейс 124 связи. Соответственно, в некоторых примерах путем мониторинга тока, потребляемого двигателем 110, определяемого датчиком 118 тока при известной скорости и известном давлении, влияние внутреннего трения при перемещении элемента регулирования потока и/или смещающего усилия при нагрузке внутренней нагрузочной пружины может быть проанализировано на предмет вероятных неисправностей. В частности, в некоторых примерах измеренный ток может быть сравнен с эталонным током, на основании ожидаемого или расчетного тока в нормальных рабочих условиях (например, определенным во время изготовления перед наступлением каких-либо состояний неисправности). В таких примерах получившаяся разность между измеренным током и эталонным током является показателем определенных неисправностей, таких как неисправность уплотнения (включая износ уплотнения, неправильную регулировку уплотнения или низкую нагрузку уплотнения), излишнее трение клапанного устройства (например, вследствие износа клапанного устройства), и/или неисправность внутренней нагрузочной пружины. В некоторых примерах, когда обнаружена такая разность в токе, создается предупреждающий сигнал или сигнал тревоги, чтобы информировать оператора или другой персонал для принятия соответствующих мер.
[0030] Как правило, будет существовать некоторая нестабильность в измеренном токе, когда двигатель 110 перемещается, вследствие несовершенств механической обработки и/или выравнивания компонентов в зубчатой передаче привода 100. Кроме того, с течением времени будет происходить износ зубчатой передачи в приводе 100 (например, заедание и/или наволакивание), что может увеличивать нестабильность тока, потребляемого двигателем 110. Соответственно, в некоторых примерах, чтобы учесть нормальную (например, расчетную) нестабильность, предупреждающий сигнал или сигнал тревоги, указывающий на вероятную неисправность, может не создаваться до тех пор, пока разность между измеренным током и эталонным током не превысит заранее установленное пороговое значение. Кроме того, в некоторых примерах нестабильность тока контролируют таким образом, что, когда нестабильность становится более выраженной, может создаваться отдельный сигнал тревоги и/или предупреждающий сигнал, чтобы указывать на износ в приводе 100 и/или обеспечивать информацию относительно того, как долго привод 100 будет продолжать работу в данных рабочих условиях.
[0031] В некоторых примерах эталонный ток основан на расчетной кривой или профиле тока с течением времени, соответствующего клапану 104, являющемуся открытым и/или закрытым в ходе нормальной работы (например, без наличия состояний неисправности). Например, на фиг. 3-5 проиллюстрирован пример профилей 300, 400, 500 тока, соответствующих открыванию и закрыванию клапана (например, клапана 104) в различных обстоятельствах. Более конкретно, на фиг. 3 и 4 проиллюстрирован пример эталонных профилей 300, 400 тока, соответствующих клапану, работающему в нормальном режиме (например, до наступления неисправности уплотнения или неисправности клапанного устройства). Эталонный профиль 300 тока соответствует клапану, работающему, не находясь под давлением (например, работающему при атмосферном давлении), а эталонный профиль 400 тока соответствует клапану, работающему под давлением (например, при 2250 фунт/кв. дюйм (15510 кПа)). На фиг. 5 проиллюстрирован пример измеренного профиля 500 тока, соответствующего клапану, работающему при таком же давлении, как на фиг. 4 (например, при 2250 фунт/кв. дюйм (15510 кПа)), после возникновения неисправности.
[0032] В некоторых примерах эталонные профили 300, 400 тока созданы для клапана 104 во время его изготовления. Таким образом, полученные профили 300, 400 тока представляют расчетные значения тока во время хода клапана перед наступлением износа или эрозии любых связанных компонентов, чтобы служить в качестве базиса для сравнения с током, потребляемым приводом 100 открывания клапана 104 в условиях эксплуатации. Измеренный профиль 500 тока по фиг. 5 является представителем вероятного профиля, который может возникать после повторяющегося использования клапана 104 и начала износа.
[0033] Как показано в иллюстрируемых примерах, профили 300, 400, 500 тока состоят из диапазона 302 времени открывания и диапазона 304 времени закрывания, соответствующих открыванию и закрыванию клапана 104, в течение периода примерно 10 секунд. Более конкретно, после начальной паузы 306, ток, как показано в каждом из профилей 300, 400, 500 тока, начинается нарастание по истечении примерно одной секунды и быстро достигается пик 308, соответствующий точке, в которой клапан 104 первоначально начинает открываться. В течение периода 310 открывания ток остается постоянным, пока клапан 104 не достигнет полностью открытого положения по истечении примерно четырех секунд, в данной точке ток падает в течение второй паузы 312 во время перехода к диапазону 304 времени закрывания. Примерно по истечении шести секунд, в иллюстрируемых примерах, ток начинает нарастать, пока не достигает второго пика 314, соответствующего точке, в которой клапан 104 первоначально начинает закрываться. Как показано в примерах профилей 300, 400, 500, тока, ток остается примерно постоянным в течение периода 316 закрывания, а затем внезапно нарастает в точке 318 закрывания, соответствующей тому, что клапан 104 достигает полностью закрытого положения, и двигатель 110 начинает действовать на внутреннюю нагрузочную пружину привода 100. Соответственно, в некоторых примерах датчик 118 тока используют в качестве альтернативной и/или дополнительной меры, когда клапан 104 является полностью закрытым, как описано выше, в связи с фиг. 2. Кроме того, как показано в иллюстрируемых примерах, в каждом из профилей 300, 400, 500 тока, ток достигает пика 320 перед падением, так как внутренняя нагрузочная пружина становится полностью нагруженной, и двигатель 110 останавливается. В некоторых примерах двигатель 110 выполнен с возможностью останавливаться при определенном пределе тока (например, 2,1 ампера в иллюстрируемых примерах). Соответственно, когда внутренняя нагрузочная пружина нагружена с помощью двигателя 110, смещающее усилие внутренней нагрузочной пружины увеличивается до тех пор, пока усилие не будет соответствовать усилию двигателя 110 при заранее установленном токе останова (например, 2,1 ампера), в данной точке двигатель 110 выключается (например, останавливается). Таким образом, положение остановки двигателя 110 в конце диапазона пружины, описанного выше в связи с фиг. 2 (например, соответствующего тому, когда внутренняя нагрузочная пружина является полностью нагруженной), может быть идентифицировано на основе пика 320.
[0034] Пример эталонного профиля 400 тока по фиг. 4 является аналогичным примеру эталонного профиля 300 тока по фиг. 3, за исключением того, что количество тока, потребляемое в течение периода 316 закрывания, больше в эталонном профиле 400 тока, связанном с клапаном, находящимся под давлением, по сравнению с эталонным профилем 300 тока, связанным с клапаном, не находящимся под давлением. В частности, как показано в иллюстрируемых примерах, когда клапан 104 не находится под давлением (фиг. 3), количество тока, потребляемого двигателем 110 в течение периода 310 открывания, примерно такое же, как ток, потребляемый в течение периода 316 закрывания, в котором профиль 300 тока по фиг. 3 составляет примерно 0,6 ампер. В отличие от этого, когда клапан 104 находится под давлением, хотя ток, потребляемый двигателем 110 в течение периода 310 открывания, является примерно таким же, как на фиг. 3 (например, примерно 0,6 ампер), ток, потребляемый в течение периода 316 закрывания, значительно выше (например, примерно 1,3 ампер), как показано на фиг. 4. Поскольку давление в клапане 104 увеличивается, ток, потребляемый двигателем 110, увеличивается, так как двигатель 110 должен преодолевать усилие текучей среды в клапане 104, чтобы закрывать клапан 104. Соответственно, в некоторых примерах клапан 104 испытывают в диапазоне давления во время изготовления (например, перед наступлением состояний неисправности) для определения эталонного тока, который возникает при закрывании клапана 104, при каждом из испытательных давлений в течение периода 316 закрывания. В некоторых примерах диапазон испытательных давлений может быть использован в качестве опорных точек для экстраполяции расчетного или эталонного тока, потребляемого двигателем 110 примера привода 100, в течение периода 316 закрывания, для любого уровня давления в клапане 104.
[0035] В некоторых примерах датчик 118 тока мониторят ток, потребляемый двигателем 110 привода 100, чтобы перемещать элемент регулирования потока клапана 104, работающего в условиях эксплуатации, микроконтроллер 106 сравнивает измеренный ток с эталонным током на основе расчетного профиля тока, соответствующего давлению текучей среды в клапане 104, работающем в условиях эксплуатации. В некоторых примерах разность между измеренным током и эталонным током во время периодов 310, 316 открывания и/или закрывания может показывать вероятную неисправность клапана 104. Например, хотя тот же клапан 104 может быть управляемым тем же давлением, как на фиг. 4, так и на фиг. 5, количество тока, потребляемого в период 310 открывания для измеренного профиля 500 тока, выше, чем соответствующий эталонный ток (например, примерно 0,8 ампер на фиг. 5 по сравнению с 0,6 ампер на фиг. 4). Аналогично, ток, потребляемый в течение периода 316 закрывания по фиг. 5, выше, чем в течение периода 316 закрывания по фиг. 4 (например, примерно 1,5 ампер на фиг. 5 по сравнению с 1,3 ампер на фиг. 4). Поскольку фиг. 4 и 5 соответствуют клапану 104, работающему при том же давлении и той же скорости, разность в токе, потребляемом двигателем 110 на фиг. 5, может быть определена как обусловленная неисправностью в клапане 104. Например, более высокий ток, чем расчетный, является показателем увеличенного трения в клапане 104, так что двигателю 110 необходима дополнительная мощность для преодоления связанных увеличенных сил сопротивления. Такое увеличенное трение может возникать из-за износа уплотнения, неправильной регулировки уплотнения и/или излишнего трения клапанного устройства. Дополнительно или альтернативно, в некоторых примерах увеличенный ток, требуемый двигателю 110, может возрастать из-за износа зубчатой передачи привода 100. Соответственно, в некоторых примерах, когда ток, потребляемый двигателем 110, больше, чем эталонный ток (как показано на фиг. 5), может быть создан сигнал тревоги или предупреждающий сигнал, чтобы информировать производственный персонал о вероятности возникновения по меньшей мере одной из трех вышеупомянутых неисправностей клапана и/или износа зубчатой передачи привода. В отличие от этого, измеренный ток, который меньше, чем эталонный ток, является показателем меньшего трения в клапане 104, которое должен преодолевать двигатель 110, чтобы перемещать элемент регулирования потока в клапане, что может возникать при наличии малой нагрузки уплотнения в клапане. Соответственно, в некоторых примерах, в которых ток, потребляемый двигателем 110, меньше, чем эталонный ток, предупреждающий сигнал может показывать низкую нагрузку уплотнения. Как описано выше, в иллюстрируемом примере двигатель 110 выполнен с возможностью останавливаться, когда ток, потребляемый двигателем 110, достигает 2,1 ампер. Соответственно, в некоторых примерах привод 100 является ограниченным верхним давлением текучей среды, связанным с клапаном 104, так что ток, потребляемый в течение периода 316 закрывания, находится значительно ниже предела тока (например, 2,1 ампера), так что двигатель 110 не останавливается при закрывании клапана 104. Однако в некоторых случаях внутреннее трение, создаваемое в клапане 104, может увеличивать ток, потребляемый двигателем 110, так что двигатель 110 может останавливаться раньше полного закрывания клапана 104. В некоторых примерах, когда двигатель 110 останавливается, это указывается падением напряжения, мониторируемого датчиком 120 напряжения. Соответственно, в некоторых примерах, напряжение, мониторируемое датчиком 120 напряжения, используют для динамического увеличения и/или уменьшения предела тока для двигателя 110, чтобы определять уровень затруднения движения в клапане 104 во время перемещения запорного элемента клапана.
[0036] Как показано в иллюстрируемых примерах, количество тока, потребляемое в течение периодов 310, 316 открывания и закрывания, не является точным количеством. Соответственно, в некоторых примерах измеренный ток и эталонный ток основаны на среднем значении тока в течение соответствующих периодов 310, 316. Кроме того, для учета обычных изменений в значении тока, в некоторых примерах разность между измеренным током и эталонным током вызывает только предупреждающий сигнал, когда разность превышает заранее определенное пороговое значение. В некоторых примерах пороговое значение может отличаться для тока, который выше расчетного значения (например, указывающего на износ уплотнения, неправильную регулировку уплотнения и излишнее трение клапанного устройства) по сравнению с током, который ниже расчетных значений (например, указывающего на низкую нагрузку уплотнения).
[0037] В некоторых примерах неисправность клапанного устройства обнаруживают путем сравнения пиков 308, 314, соответствующих тому, что элемент регулирования потока в клапане начинает перемещение либо из полностью закрытого положения, либо полностью открытого положения. Как показано в иллюстрируемых примерах, измеренный профиль 500 тока по фиг. 5 включает пики 308, 314, которые поднимаются значительно выше, чем соответствующие пики 308, 314 эталонного профиля 400 тока по фиг. 4. Например, как показано на фиг. 4, пики 308, 314 достигают тока примерно 0,7 ампер и 1,3 ампер, соответственно, тогда как пики 308, 314 по фиг. 5 достигают тока примерно 1,0 ампер и 2,0 ампер, соответственно. В некоторых указанных примерах, когда разность между измеренным током (фиг. 5) и эталонным током на соответствующих пиках 308, 314 превышает пороговое значение, создается предупреждающий сигнал для указания вероятной неисправности клапанного устройства. Как указано выше, ток в течение периодов 310, 316 открывания и закрывания также может изменяться между измеренным током и эталонным током. Таким образом, в некоторых примерах значения, используемые для сравнения на пиках 308, 316, нормализуют путем вычисления высоты пика тока, соответствующей разности между максимальным значением тока, потребляемого на пиках 308, 316, и средним током, потребляемым в течение соответствующего периода 310, 316 открывания или закрывания, как для измеренного, так и для эталонного тока. Например, пики 308, 314 по фиг. 4 составляют примерно на 0,1 ампер больше, чем в течение соответствующих периодов 310, 316 открывания и закрывания для высоты пика тока на каждом из пиков 308, 314 порядка 0,1. Напротив, пики 308, 314 по фиг. 5 составляют примерно на 0,2 ампер больше, чем в течение соответствующих периодов 310, 316 открывания и закрывания для высоты пика тока на каждом из пиков 308, 314 порядка 0,2. В некоторых примерах предупреждающий сигнал создается на основе разности между высотой пика тока измеренного тока и высотой пика тока эталонного тока.
[0038] В дополнение к некоторой расчетной нестабильности в измеренном токе, в некоторых примерах, когда существует влияние износа в зубчатой передаче привода 100, нестабильность может быть более выраженной или очевидной. Например, тогда как периоды 310, 316 открывания и закрывания эталонных профилей 300, 400 тока связаны, по сути, с неизменным током (например, с минимальной нестабильностью), ток, потребляемый двигателем 110 в течение периодов 310, 316 открывания и закрывания эталонного профиля 500 тока, включает намного большую нестабильность. Соответственно, в некоторых примерах нестабильность измеренного тока сравнивают с нестабильностью эталонного тока, и создается предупреждающий сигнал, указывающий на вероятный износ зубчатой передачи, когда разность превышает пороговое значение.
[0039] Дополнительно или альтернативно в некоторых примерах измеренный профиль 500 тока сравнивают с эталонным профилем 400 тока для диагностики неисправности внутренней нагрузочной пружины в приводе 100. Например, как описано выше, каждый из профилей 300, 400, 500 тока имеет отличающуюся точку 318 закрывания, указывающую точку, в которой клапан 104 полностью закрыт, и какое-либо перемещение двигателем 110 привода 100 нагружает (например, сжимает) внутреннюю нагрузочную пружину. Как показано в примере профилей 300, 400 тока по фиг. 3 и 4, когда пружина нагружается, ток, потребляемый двигателем 110, нарастает для преодоления увеличивающегося усилия пружины до тех пор, пока не достигнет пика 320, который является показателем того, что внутренняя нагрузочная пружина полностью нагружена. В некоторых примерах полностью нагруженная пружина соответствует точке, в которой двигатель 110 останавливается (например, усилие внутренней нагрузочной пружины равно усилию двигателя 110 при пределе тока, установленном для привода 100). Как показано на фиг. 5, измеренный профиль 500 тока внезапно достигает пика в точке 318 закрывания, до пика 320, а не нарастает до положения останова (например, при пике 320) таким же образом, как показано в эталонных профилях 300, 400 тока, таким образом, показывая, что внутренняя нагрузочная пружина не нагружена должным образом из-за неисправности пружины. Соответственно, в некоторых примерах, когда измеренный ток вдоль профиля тока между точкой 318 закрывания и пиком 320 отличается от эталонного тока на пике 320, создается предупреждающий сигнал, чтобы указать на неисправность пружины. В некоторых примерах предупреждающий сигнал создается только в случае, если разность превышает заранее заданное пороговое значение.
[0040] Профили 300, 400, 500 тока в иллюстрируемых примерах показаны в качестве примера, только с целью пояснения, и не предназначены для указания точных значений и/или расчета времени тока, потребляемого во время хода клапана. Напротив, количество тока, потребляемое двигателем 110, может изменяться на основе ряда факторов, включая размер клапана, соединенного с двигателем, скорость, с которой клапан приводится в действие, стратегию управления, определяющую то, когда клапан приводится в действие, местоположение, в которое должен перемещаться элемент регулирования потока, и давление внутри клапана.
[0041] Как показано на фиг. 1, пример привода 100 дополнительно снабжен датчиком 122 температуры для мониторинга температуры привода 100. В некоторых случаях температура привода 100 влияет на ток, потребляемый двигателем 110. Например, двигатель 110 может работать более эффективно при пониженных температурах, но пониженные температуры могут увеличивать вязкость консистентной смазки в системе и, следовательно, силы трения, которые должен преодолевать двигатель 110. Соответственно, в некоторых примерах температуру привода 100 учитывают при сравнении измеренного тока, потребляемого двигателем 110, с эталонным током. Например, в некоторых примерах связь между температурой привода и током используют для регулировки базисных значений тока, связанных с эталонным током. Дополнительно или альтернативно, в некоторых примерах пороговое значение между эталонным током и измеренным током регулируют, основываясь на отклонениях в температуре, чтобы учесть любые расчетные отклонения между эталонным и измеренными значениями перед созданием предупреждающего сигнала.
[0042] Кроме того, как показано в иллюстрируемом примере, привод 100 включает в себя интерфейс 124 связи для осуществления возможности связи привода 100 с другими компонентами в системе управления технологическим процессом и/или с производственным персоналом. Например, в некоторых примерах через интерфейс 124 связи какой-либо из описанных выше предупреждающих сигналов может быть передан производственному персоналу. Кроме того, в некоторых примерах привод 100 поддерживает связь с датчиком давления через интерфейс 124 связи, чтобы получать в режиме реального времени данные измерений давления, связанного с клапаном 104, для определения соответствующего эталонного тока, чтобы сравнивать его с измеренным током, как описано выше в связи с фиг. 3-5.
[0043] Хотя на фиг. 1 проиллюстрирован пример осуществления варианта привода 100, один или больше элементов, процессов и/или устройств, показанных на фиг. 1, могут быть объединены, разделены, перегруппированы, пропущены, исключены и/или реализованы любым другим способом. Кроме того, пример микроконтроллера 106, пример ведущего элемента 108 двигателя, пример двигателя 110, пример 112 датчиков поворота, пример 114 датчика направления, пример 116 датчика положения клапана, пример 118 датчика тока, пример 120 датчика напряжения, пример 122 датчика температуры, пример интерфейса 124 связи, и/или, вообще, пример привода 100 по фиг. 1 может быть реализован с помощью аппаратных средств, программного обеспечения, встроенного программного обеспечения и/или любого сочетания аппаратных средств, программного обеспечения и/или встроенного программного обеспечения. Таким образом, какой-либо из примеров: примера микроконтроллера 106, примера ведущего элемента 108 двигателя, примера двигателя 110, примера 112 датчиков поворота, примера 114 датчика направления, примера 116 датчика положения клапана, примера 118 датчика тока, примера 120 датчика напряжения, примера 122 датчика температуры, примера интерфейса 124 связи, и/или, вообще, примера привода 100 может быть реализован с помощью одной или больше аналоговой или цифровой схемы (схем), логических схем, программируемого процессора (процессоров), специализированной интегральной схемы (схем) (application specific integrated circuit(s), ASIC(s)), программируемого логического устройства (устройств) (programmable logic device(s), PLD(s)) и/или логического устройства (устройств), программируемых потребителем (field programmable logic device(s), FPLD(s)). При изучении любого из устройств или систем согласно пунктам формулы настоящего изобретения для охвата реализации исключительно программного обеспечения и/или аппаратных средств, по меньшей мере один из примера микроконтроллера 106, примера ведущего элемента 108 двигателя, примера двигателя 110, примера 112 датчиков поворота, примера 114 датчика направления, примера 116 датчика положения клапана, примера 118 датчика тока, примера 120 датчика напряжения, примера 122 датчика температуры и/или примера интерфейса 124 связи, является/являются точно определенными, чтобы включать в себя материальное читаемое компьютером запоминающее устройство или запоминающий диск, такой как память, цифровой видеодиск (digital versatile disk, DVD), компакт-диск (compact disk, CD), диск Blu-ray, и т.п., хранящий программное и/или встроенное программное обеспечение. Кроме того, пример привода 100 может содержать один или больше элементов, процессов и/или устройств в дополнение к тем или вместо тех, которые показаны на фиг. 1, и/или может содержать больше, чем один из всех или из части показанных элементов, процессов и устройств.
[0044] На фиг. 6-7 приведены структурные схемы, представляющие пример способов реализации примера привода 100 по фиг. 1. В данных примерах способы могут быть реализованы с использованием машиночитаемых команд с помощью процессора, такого как процессор 812, показанный в примере процессорной платформы 800, описанной ниже в связи с фиг. 8. Программа может быть воплощена в программном обеспечении, сохраняемом на материальном читаемом компьютером запоминающем носителе, таком как компакт-диск, гибкий диск, накопитель на жестком диске, цифровой видеодиск (DVD), диск Blu-ray, или память, связанная с процессором 812, но вся программа и/или части ее при необходимости могут быть выполнены с помощью устройства, отличающегося от процессора 812, и/или воплощенного во встроенном программном обеспечении или специализированном программном обеспечении. Кроме того, хотя пример программы описан со ссылками на блок-схемы, показанными на фиг. 6-7, могут быть использованы многие другие способы выполнения примера привода 100. Например, порядок выполнения этапов может быть изменен, и/или некоторые из описанных этапов могут быть изменены, исключены или объединены.
[0045] Как упомянуто выше, пример процессов по фиг. 6-7 может быть реализован с использованием кодированных инструкций (например, компьютеро- и/или машиночитаемых инструкций), хранящихся на материальном читаемом компьютером запоминающем носителе, таком как накопитель на дисках, флеш-память, постоянное запоминающее устройство (read-only memory, ROM), компакт-диск (compact disk, CD), цифровой видеодиск (digital versatile disk, DVD), кэш-память, оперативное запоминающее устройство (random-access memory, RAM) и/или другое запоминающее устройство или запоминающий диск, на котором информация сохраняется в течение какого-либо периода (например, в течение длительных периодов времени, постоянно, в течение коротких этапов, в течение временной буферизации, и/или в течение кэширования информации). Используемый здесь термин «материальное читаемое компьютером запоминающее устройство» является четко определенным, включающим какой-либо тип читаемого компьютером запоминающего носителя и/или запоминающего диска, и исключающим распространяющиеся сигналы. Используемые здесь термины «материальный читаемый компьютером запоминающий носитель» и «материальный машиночитаемый запоминающий носитель» используются как взаимозаменяемые. Дополнительно или альтернативно, пример процессов по фиг. 6-7 может быть реализован с использованием кодированных инструкций (например, компьютеро- и/или машиночитаемых инструкций), сохраняемых на энергонезависимом компьютерном и/или машиночитаемом носителе, таком как накопитель на дисках, флеш-память, постоянное запоминающее устройство, компакт-диск, цифровой видеодиск, кэш-память, оперативное запоминающее устройство и/или другое запоминающее устройство или запоминающий диск, на котором информация сохраняется в течение какого-либо периода (например, в течение длительных периодов времени, постоянно, в течение коротких этапов, в течение временной буферизации, и/или в течение кэширования информации). Используемый здесь термин «энергонезависимый читаемый компьютером носитель» является четко определенным, включающим какой-либо тип читаемого компьютером устройства и/или диска, и исключающим распространяющиеся сигналы. Используемый здесь оборот «по меньшей мере» использованный как переходный термин в преамбуле формулы, является не ограничивающим, таким же образом, как термин «содержащий» является не ограничивающим.
[0046] Способ по фиг. 6 начинается на этапе 600, на котором микроконтроллер 106 электрического привода 100 клапана мониторит клапан 104. В некоторых примерах привод 100 непосредственно мониторит клапан 104 посредством датчика 116 положения клапана. Дополнительно или альтернативно, в некоторых примерах привод 100 опосредованно мониторит клапан 104 посредством датчиков 112 поворота и/или датчика 118 тока, связанных с приводом 100. На этапе 602 микроконтроллер 106, посредством двигателя 110, закрывает клапан 104. На этапе 604 микроконтроллер 106 определяет, является ли клапан 104 полностью закрытым. В некоторых примерах определение выполняют на основе обнаружения того, когда запорный элемент клапана достигает седла клапана, что приводит к полному упору. В некоторых примерах полный упор обнаруживают посредством датчика 116 положения клапана. В некоторых примерах полный упор обнаруживают на основе того, когда двигатель 110 привода 100 останавливается (например, когда нет внутренней нагрузочной пружины). В других примерах, в которых имеется внутренняя нагрузочная пружина, полностью закрытое положение определяют на основе известного расстояния, проходимого приводным валом до полной нагрузки внутренней нагрузочной пружины, и точки, где двигатель 110 останавливается. В некоторых примерах полностью закрытое положение клапана 104 определяют на основании внезапного изменения тока, потребляемого двигателем, что обнаруживается с помощью датчика 118 тока. Если микроконтроллер 106 определяет, что клапан 104 не полностью закрыт, управление возвращается к этапу 602 для продолжения закрывания клапана. Если микроконтроллер 106 определяет, что клапан полностью закрыт, управление переходит к этапу 606.
[0047] На этапе 606 примера способа по фиг. 6, микроконтроллер 106 посредством датчиков 112 поворота и/или датчика 116 положения клапана определяет, соответствует ли измеренное положение элемента регулирования потока клапана 104 опорному положению клапана 104, когда он полностью закрыт.В некоторых примерах опорное положение определяют во время изготовления клапана 104. В некоторых примерах измеренное положение элемента регулирования потока считается соответствующим опорному положению, если разность между измеренным положением элемента регулирования потока и опорным положением находится в рамках порогового значения. Если микроконтроллер 106 определяет, что измеренное положение элемента регулирования потока не соответствует опорному положению (например, разность превышает пороговое значение), микроконтроллер 106 создает предупреждающий сигнал, указывающий на неисправность клапанного устройства (этап 608), после чего микроконтроллер 106 определяет, следует ли останавливать действие клапана 104 (этап 610). Если микроконтроллер 106 определяет, что следует остановить действие, пример способа по фиг. 6 заканчивается. Если микроконтроллер 106 определяет, что не следует останавливать действие клапана 104 (этап 610), управление переходит к этапу 612, где двигатель 110 нагружает внутреннюю нагрузочную пружину привода 100. В некоторых примерах, например, когда имеется неисправность пружины, нагрузка пружины включает прохождение двигателем 110 определенного расстояния (например, соответствующего области 226, где отсутствует нагрузка по фиг. 2) за полностью закрытое положение, перед фактическим началом нагрузки пружины. Возвращаясь к этапу 606, если микроконтроллер 106 определяет, что измеренное положение элемента регулирования потока не соответствует опорному положению (например, разность не превышает порогового значения), управление переходит к этапу 612, где двигатель 110 нагружает внутреннюю нагрузочную пружину.
[0048] На этапе 614 микроконтроллер 106 определяет посредством датчика 118 тока, является ли нормальным ток, потребляемый двигателем 110. В некоторых примерах микроконтроллер 106 определяет, является ли нормальным ток, потребляемый двигателем 110, путем сравнения измеренного тока с эталонным током, определенным во время изготовления привода 100. В некоторых примерах ток, потребляемый двигателем 110, считают нормальным, если разность между измеренным током и эталонным током находится в рамках порогового значения. Если микроконтроллер 106 определяет, что ток, потребляемый двигателем 110, не является нормальным (например, разность превышает пороговое значение), микроконтроллер 106 создает предупреждающий сигнал, указывающий на неисправность пружины (этап 616), после чего микроконтроллер 106 определяет, следует ли останавливать действие клапана 104 (этап 618). Если микроконтроллер 106 определяет, что следует остановить действие, пример способа по фиг. 6 заканчивается. Если микроконтроллер 106 определяет, что не следует останавливать действие клапана 104 (этап 618), управление переходит к этапу 620, где двигатель 110 нагружает внутреннюю нагрузочную пружину привода 110, пока двигатель 110 не останавливается (например, соответствие полностью нагруженной пружине). Возвращаясь к этапу 614, если микроконтроллер 106 определяет, что ток, потребляемый двигателем 110, является нормальным, управление переходит к этапу 620, где двигатель 110 нагружает внутреннюю пружину, пока двигатель 110 не останавливается.
[0049] На этапе 622 микроконтроллер 106 определяет, посредством датчиков 112 поворота, переместился ли приводной вал двигателя 110 на расчетное расстояние. В некоторых примерах расчетное расстояние может соответствовать либо всему диапазону перемещения приводного вала двигателя 110, либо диапазону перемещения самого приводного вала при нагружении внутренней нагрузочной пружины (например, диапазону пружины). В любом случае расчетное расстояние определяют с помощью эталонного расстояния, определенного во время изготовления привода 100, относительно точки отсчета. В некоторых примерах считают, что двигатель 110 прошел расчетное расстояние, если разность между измеренным расстоянием, проходимым приводным валом, и эталонным расстоянием находится в рамках порогового значения. Если микроконтроллер 106 определяет, что двигатель 110 не прошел расчетное расстояние (например, разность превышает пороговое значение), микроконтроллер 106 создает предупреждающий сигнал, указывающий на неисправность пружины (этап 624). В некоторых примерах, если привод 100 обеспечен только датчиками 112 поворота для измерения положения и/или перемещения элемента регулирования потока в клапане 104, каждый из предупреждающих сигналов, созданных на этапе 608 и этапе 624, указывает на вероятность по меньшей мере одной из неисправностей, клапанного устройства или пружины, поскольку датчики 112 поворота не могут проводить различие между этими неисправностями без вспомогательных измерений (например, посредством датчика 116 положения клапана). После создания предупреждающего сигнала (этап 624) микроконтроллер 106 определяет, следует ли остановить действие клапана 104 (этап 626). Если микроконтроллер 106 определяет, что следует остановить действие, пример способа по фиг. 6 заканчивается. Если микроконтроллер 106 определяет, что не следует останавливать действие клапана 104 (этап 626), управление переходит к этапу 628, где микроконтроллер 106 определяет, следует ли продолжать мониторинг клапана 104. Возвращаясь к этапу 622, если микроконтроллер 106 определяет, что приводной вал прошел расчетное расстояние, управление переходит к этапу 628. Если микроконтроллер 106 определяет, что следует продолжить мониторинг клапана 104 (этап 628), управление возвращается к этапу 600. Если микроконтроллер 106 определяет, что не следует продолжать мониторинг клапана 104, пример способа по фиг. 6 заканчивается.
[0050] Способ по фиг. 7 начинается на этапе 700, на котором микроконтроллер 106 электрического привода 100 клапана мониторит клапан 104. В некоторых примерах привод 100 непосредственно мониторит клапан 104 посредством датчика 116 положения клапана. Дополнительно или альтернативно, в некоторых примерах привод 100 опосредованно мониторит клапан 104 посредством датчиков 112 поворота и/или датчика 118 тока, связанных с приводом 100. На этапе 702 микроконтроллер 106 мониторит давление в клапане 104. В некоторых примерах давление измеряют посредством датчика давления, который обеспечивает обратную связь с микроконтроллером 106 через интерфейс 124 связи. На этапе 712 микроконтроллер 106, посредством двигателя 110, начинает перемещение элемента регулирования потока клапана 104. На этапе 706 микроконтроллер 106 определяет посредством датчика 118 тока, является ли пик тока, потребляемого двигателем 110, выше расчетного. В некоторых примерах расчетный пик для тока соответствует эталонному току, связанному с пиковым (например, пики 308, 314 по фиг. 3-5) током, потребляемым двигателем 110, определенным во время изготовления клапана 104. В некоторых примерах ток, потребляемый двигателем 110, считают пиком, большим ожидаемого, если пиковый ток, потребляемый двигателем 110, выше, чем эталонный ток, по меньшей мере с учетом порогового значения. Если микроконтроллер 106 определяет, что пиковый ток, потребляемый двигателем 110, выше расчетного, микроконтроллер 106 создает предупреждающий сигнал, указывающий на неисправность клапанного устройства (этап 708), после чего микроконтроллер 106 определяет, следует ли останавливать действие клапана 104 (этап 710). Если микроконтроллер 106 определяет, что следует остановить действие, пример способа по фиг. 7 заканчивается. Если микроконтроллер 106 определяет, что не следует останавливать действие клапана 104 (этап 710), управление переходит к этапу 712, где микроконтроллер 110 определяет, следует ли продолжать перемещение элемента регулирования потока. Если микроконтроллер 106 определяет, что пиковый ток, потребляемый двигателем 110, не выше расчетного (этап 706), управление переходит к этапу 712.
[0051] На этапе 714 микроконтроллер 106 определяет посредством датчика 118 тока, проявляет ли ток, потребляемый двигателем 110, нестабильность, большую расчетной. В некоторых примерах микроконтроллер 106 определяет, проявляет ли ток, потребляемый двигателем 110, нестабильность, большую расчетной, путем сравнения нестабильности измеренного количества тока, потребляемого двигателем 110, с нестабильностью эталонного тока, определенной во время изготовления привода 100. В некоторых примерах считают, что ток, потребляемый двигателем 110, проявляет нестабильность, большую расчетной, если нестабильность является большей, чем нестабильность эталонного тока, по меньшей мере с учетом порогового значения. Если микроконтроллер 106 определяет, что ток, потребляемый двигателем 110, проявляет нестабильность, большую расчетной, микроконтроллер 106 создает предупреждающий сигнал, указывающий на износ привода (этап 716), после чего микроконтроллер 106 определяет, следует ли останавливать действие клапана 104 (этап 718). Если микроконтроллер 106 определяет, что следует остановить действие, пример способа по фиг. 7 заканчивается. Если микроконтроллер 106 определяет, что не следует останавливать действие клапана 104 (этап 718), управление переходит к этапу 720. Если микроконтроллер 106 определяет, что ток, потребляемый двигателем 110, не проявляет нестабильность, большую расчетной (этап 714), управление переходит к этапу 720.
[0052] На этапе 720 микроконтроллер 106 определяет, является ли скорость двигателя 110 меньшей, чем расчетная. В некоторых примерах расчетная скорость основана на скорости, определяемой микроконтроллером 106, на основании стратегии управления для управления клапаном 104. Поскольку микроконтроллер 106 непосредственно управляет двигателем 110, через ведущий элемент 108 двигателя, скорость двигателя 110 должна быть такой же, как расчетная, если только не будет недостаточным доступный ток, поскольку ток, необходимый двигателю 110, превышает верхний предел доступного тока. Соответственно, если микроконтроллер 106 определяет, что скорость двигателя 110 меньше расчетной, микроконтроллер 106, на этапе 722, создает предупреждающий сигнал, указывающий на вероятность по меньшей мере одной из следующих проблем: (1) износ уплотнения, (2) неправильная регулировка уплотнения, и/или (3) излишнее трение клапанного устройства. В примере способа по фиг. 7, управление затем переходит к этапу 730, на котором микроконтроллер 106 определяет, следует ли останавливать действие клапана 104. Если микроконтроллер 106 определяет, что следует остановить действие, пример способа по фиг. 7 заканчивается. Если микроконтроллер 106 определяет, что не следует останавливать действие клапана 104 (этап 730), управление переходит к этапу 732, где микроконтроллер 110 завершает перемещение элемента регулирования потока.
[0053] Возвращаясь к этапу 720, если микроконтроллер 106 определяет, что скорость двигателя 110 не меньше, чем нормальная, микроконтроллер 106 определяет, посредством датчика 118 тока, является ли ток, потребляемый двигателем 110, большим, чем расчетный (этап 724). В некоторых примерах микроконтроллер 106 определяет, является ли ток, потребляемый двигателем 110, большим, чем расчетный, путем сравнения измеренного количества тока, потребляемого двигателем 110, с эталонным током, определенным во время изготовления привода 100. В некоторых примерах эталонный ток зависит от давления в клапане 104. Таким образом, в некоторых примерах микроконтроллер 106 сравнивает мониторируемый ток с эталонным током, соответствующим давлению в клапане, определенному на этапе 702. В некоторых примерах ток, потребляемый двигателем 110, считают большим расчетного, если ток, потребляемый двигателем 110, выше, чем эталонный ток, по меньшей мере с учетом порогового значения. Если микроконтроллер 106 определяет, что ток, потребляемый двигателем 110, выше расчетного, управление возвращается к этапу 722, где микроконтроллер 106 создает предупреждающий сигнал, как описано выше.
[0054] Если микроконтроллер 106 определяет, что ток, потребляемый двигателем 110, не больше расчетного, управление переходит к этапу 726, на котором микроконтроллер 106 определяет, посредством датчика 118 тока, является ли ток, потребляемый двигателем 110, меньше расчетного. В некоторых примерах микроконтроллер 106 определяет, является ли ток, потребляемый двигателем 110, меньше расчетного, тем же способом, как описано выше в связи с этапом 724, за исключением того, когда определение, основанное на токе, потребляемом двигателем 110, является более низким, чем эталонный ток по меньшей мере с учетом порогового значения. Если микроконтроллер 106 определяет, что ток, потребляемый двигателем 110, ниже расчетного, микроконтроллер 106 создает предупреждающий сигнал, указывающий на низкую нагрузку уплотнения (этап 728), после чего микроконтроллер 106 определяет, следует ли останавливать действие клапана 104 (этап 730), как описано выше. Если микроконтроллер 106 определяет, что ток, потребляемый двигателем 110, не ниже расчетного, управление переходит к этапу 732, на котором микроконтроллер 106, посредством двигателя 110, завершает перемещение элемента регулирования потока. На этапе 734, микроконтроллер 106 определяет, следует ли продолжать мониторинг клапана 104. Если микроконтроллер 106 определяет, что следует продолжить мониторинг клапана 104, управление возвращается к этапу 700. Если микроконтроллер 106 определяет, что не следует продолжать мониторинг клапана 104, пример способа по фиг. 7 заканчивается.
[0055] На фиг. 8 приведена структурная схема примера процессорной платформы 800, способной выполнять инструкции, по фиг. 6-7 для реализации привода 100 по фиг. 1. Процессорная платформа 800 может представлять собой, например, сервер, персональный компьютер, мобильное устройство (например, сотовый телефон, смартфон, планшет, такой как iPad™), персональный цифровой секретарь (personal digital assistant, PDA), устройство для доступа к Интернету, или любой другой тип вычислительного устройства.
[0056] Процессорная платформа 800 в иллюстрируемом примере содержит процессор 812. Процессор 812 в иллюстрируемом примере представляет собой аппаратное средство. Например, процессор 812 может быть реализован с помощью одной или большего количества интегральных микросхем, логических схем, микропроцессоров или устройств управления любого желаемого семейства или производителя.
[0057] Процессор 812 в иллюстрируемом примере содержит локальное запоминающее устройство 813 (например, кэш-память). Процессор 812 в иллюстрируемом примере посредством шины 818 поддерживает связь с оперативным запоминающим устройством, включающим в себя энергозависимую память 814 и энергонезависимую память 816. Энергонезависимая память 814 может быть реализована с помощью синхронного динамического запоминающего устройства с произвольной выборкой (SDRAM), динамического запоминающего устройства с произвольной выборкой (DRAM), динамического запоминающего устройства с произвольной выборкой фирмы RAMBUS (RDRAM) и/или любого другого типа устройства памяти с произвольным доступом. Энергонезависимая память 816 может быть реализована с помощью флэш-памяти и/или другого желаемого типа устройства памяти. Доступ к основной памяти 814, 816 регулируется с помощью контроллера памяти.
[0058] Процессорная платформа 800 в иллюстрируемом примере содержит также схему 820 интерфейса. Схема интерфейса 820 может быть реализована с помощью любого типа интерфейсного стандарта, такого как интерфейс Ethernet, универсальная последовательная шина (USB), и/или последовательный интерфейс PCI express.
[0059] В иллюстрируемом примере одно или больше устройств 822 ввода соединено со схемой 820 интерфейса. Устройство (устройства) 822 ввода дает (дают) пользователю возможность вводить данные и инструкции в процессор 812. Устройство (устройства) ввода могут быть реализованы, например, с помощью аудиосенсора, микрофона, фото- или видеокамеры, клавиатуры, кнопки, мыши, сенсорного экрана, сенсорной площадки, шарового манипулятора, пишущего узла и/или системы распознавания речи.
[0060] В иллюстрируемом примере одно или большее количество устройств 824 вывода также соединено со схемой 820 интерфейса. Устройства 824 вывода могут быть реализованы, например, с помощью устройств отображения данных (например, светоизлучающий диод (light emitting diode, LED), органический светоизлучающий диод (organic light emitting diode, OLED), жидкокристаллический дисплей, дисплей на электронно-лучевой трубке (cathode ray tube display, CRT), сенсорный экран, сенсорное устройство вывода, светоизлучающий диод (light emitting diode, LED), принтер и/или динамики). Схема 820 интерфейса в иллюстрируемом примере, таким образом, обычно содержит карту графического драйвера, микросхему графического драйвера или процессор графического драйвера.
[0061] Схема 820 интерфейса в иллюстрируемом примере также содержит устройство связи, такое как передатчик, приемник, приемопередатчик, модем и/или сетевую интерфейсную плату для осуществления обмена данными с внешними компьютерами (например, вычислительными устройствами любого типа) через сеть 826 (например, Ethernet-соединение, цифровая абонентская линия связи (DSL), телефонная линия, коаксиальный кабель, система сотовой телефонной связи, и т.п.).
[0062] Процессорная платформа 800 в иллюстрируемом примере также содержит одно или несколько запоминающих устройств 828 большой емкости для хранения программ и/или данных. Примеры таких запоминающих устройств 828 большой емкости включают в себя накопители на гибких дисках, накопители на жестких дисках, накопители на компакт-дисках, накопители на дисках Blu-ray, системы RAID и накопители на универсальных цифровых дисках (DVD).
[0063] Кодированные инструкции 832 для реализации способа по фиг. 6-7 могут храниться в запоминающем устройстве 828 большой емкости, в энергозависимой памяти 814, в энергонезависимой памяти 816, и/или на съемном материальном читаемом компьютером запоминающем носителе, таком как компакт-диск или универсальный цифровой диск.
[0064] Хотя в настоящем документе раскрыты определенные примеры осуществления способов, устройств и изделий, объем защиты данного патента не ограничивается ими. Напротив, настоящий патент охватывает все способы и изделия, явно подпадающие под объем действия формулы изобретения настоящего патента.





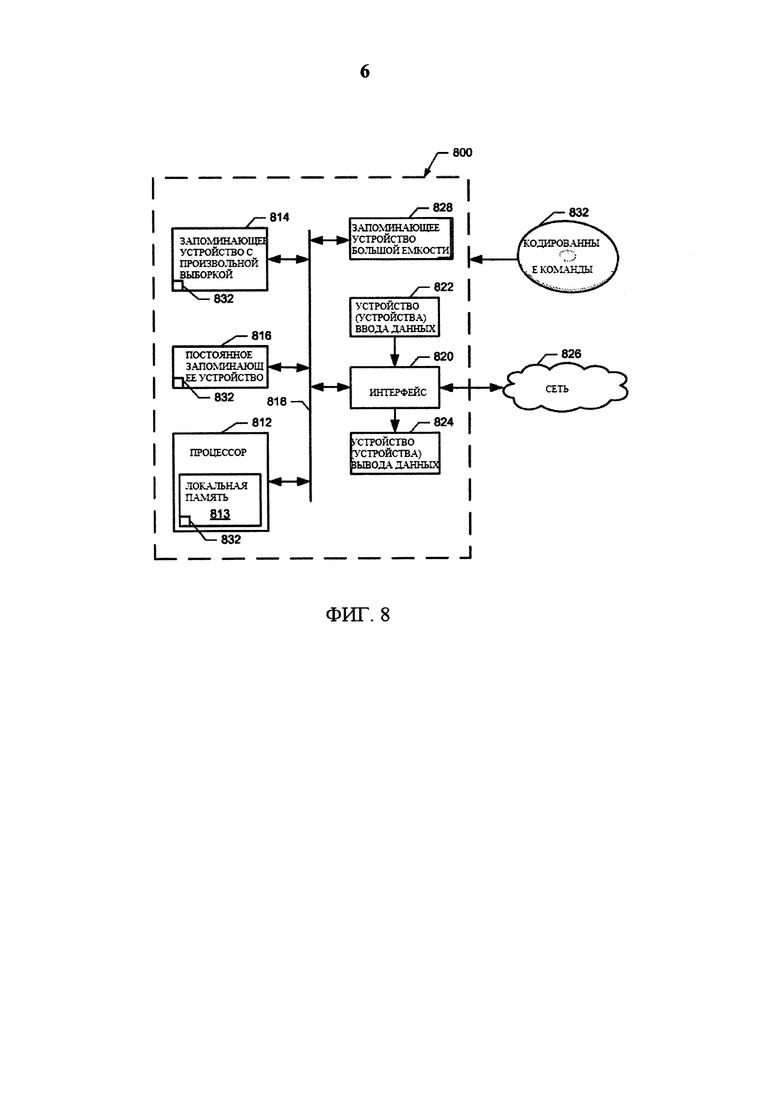
Группа изобретений относится к способу и устройству для диагностики клапана с использованием электрических приводов клапана. Электрический привод клапана содержит: электрический двигатель для приведения в действие клапана, датчики поворота для мониторинга поворота приводного вала, связанного с электрическим двигателем, для определения расстояния, проходимого приводным валом, датчик положения клапана для мониторинга положения элемента регулирования потока клапана. Электрический привод клапана содержит процессор для создания предупреждающего сигнала на основе обратной связи от датчиков поворота и датчика положения клапана, при этом предупреждающий сигнал указывает, связана ли неисправность с приводом клапана или с клапаном. Заявлен материальный машиночитаемый запоминающий носитель, содержащий инструкции. Техническим результатом является решение проблемы, связанной с диагностикой вероятных неисправностей как в самом клапане, так и в соответствующем приводе. 3 н. и 23 з.п. ф-лы, 8 ил.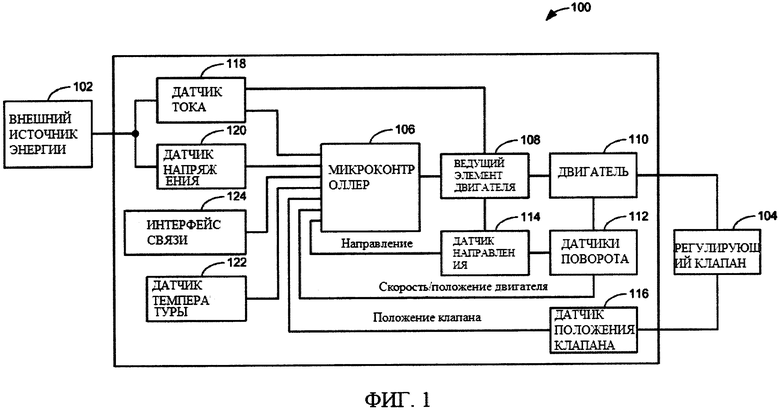
1. Электрический привод клапана, содержащий: электрический двигатель для приведения в действие клапана;
датчики поворота для мониторинга поворота приводного вала, связанного с электрическим двигателем, для определения расстояния, проходимого приводным валом;
датчик положения клапана для мониторинга положения элемента регулирования потока клапана и
процессор для создания предупреждающего сигнала на основе обратной связи от датчиков поворота и датчика положения клапана, при этом предупреждающий сигнал указывает, связана ли неисправность с приводом клапана или с клапаном.
2. Привод по п. 1, в котором процессор служит для вычисления разности между измеренным положением элемента регулирования потока, когда клапан полностью закрыт, и опорным положением и для создания основанного на разности предупреждающего сигнала для указания на неисправность клапанного устройства.
3. Привод по п. 2, в котором измеренное положение элемента регулирования потока, когда клапан полностью закрыт, определяют на основании обнаружения датчиком положения клапана, когда элемент регулирования потока прекращает перемещение.
4. Привод по п. 2, в котором измеренное положение элемента регулирования потока, когда клапан полностью закрыт, определяют на основании обнаружения датчиком поворота расстояния, проходимого приводным валом перед остановкой электрического двигателя при закрывании клапана.
5. Привод по п. 1, дополнительно содержащий датчик тока для мониторинга тока, потребляемого электрическим двигателем, когда он перемещает элемент регулирования потока, а процессор служит для сравнения тока, потребляемого электрическим двигателем, с эталонным током и для создания предупреждающего сигнала на основе сравнения.
6. Привод по п. 1, в котором предупреждающий сигнал служит для указания по меньшей мере одной из неисправностей, износа уплотнения, неправильной регулировки уплотнения или излишнего трения клапанного устройства, когда ток, потребляемый электрическим двигателем, больше, чем эталонный ток, по меньшей мере с учетом первого порогового значения, при этом предупреждающий сигнал служит для указания низкой нагрузки уплотнения, когда ток, потребляемый электрическим двигателем, меньше, чем эталонный ток, по меньшей мере с учетом второго порогового значения.
7. Привод по п. 1, в котором предупреждающий сигнал служит для указания на неисправность клапанного устройства, когда разность между пиком тока, потребляемого электрическим двигателем, и пиком эталонного тока превышает пороговое значение.
8. Привод по п. 1, дополнительно содержащий внутреннюю нагрузочную пружину для смещения клапана, когда электроэнергия к электрическому приводу клапана отключена, при этом внутренняя нагрузочная пружина нагружена, когда приводной вал проходит за местоположение, соответствующее положению клапана при полном закрывании.
9. Привод по п. 1, в котором процессор служит для определения, посредством датчиков поворота, расстояния, проходимого приводным валом, когда электрический двигатель останавливается, и для создания предупреждающего сигнала, чтобы указывать по меньшей мере на одну из неисправностей: пружины или клапанного устройства, когда разность между расстоянием, проходимым приводным валом, когда электрический двигатель останавливается, и эталонным расстоянием превышает пороговое значение.
10. Привод по п. 9, в котором процессор служит для:
мониторинга разностей между расстоянием, проходимым приводным валом, и эталонным расстоянием во время ряда последовательных ходов клапана, и
создания предупреждающего сигнала для указания на одну из неисправностей: пружины или клапанного устройства на основании скорости, с которой изменяются разности.
11. Привод по п. 8, дополнительно содержащий датчик тока для мониторинга тока, потребляемого электрическим двигателем, когда он нагружает внутреннюю нагрузочную пружину, а процессор служит для создания предупреждающего сигнала, чтобы указывать на неисправность пружины, если разность между током, потребляемым электрическим двигателем, и эталонным током превышает пороговое значение.
12. Способ диагностики клапана, включающий в себя:
мониторинг расстояния, проходимого приводным валом, связанным с электрическим двигателем электрического привода клапана, используемым для управления клапаном;
мониторинг положения элемента регулирования потока клапана посредством датчика положения клапана, связанного с приводом, и
создание предупреждающего сигнала на основе расстояния, проходимого приводным валом, и положения элемента регулирования потока, причем предупреждающий сигнал указывает, связана ли неисправность с приводом клапана или с клапаном.
13. Способ по п. 12, дополнительно включающий:
определение измеренного положения элемента регулирования потока, когда клапан полностью закрыт;
вычисление разности между измеренным положением элемента регулирования потока и эталонным положением и
создание предупреждающего сигнала на основании разности, чтобы указывать на неисправность клапанного устройства.
14. Способ по п. 13, дополнительно включающий в себя определение измеренного положения элемента регулирования потока, когда клапан полностью закрыт, на основании положения элемента регулирования потока, когда клапан прекращает перемещение.
15. Способ по п. 13, дополнительно включающий в себя определение измеренного положения элемента регулирования потока, когда клапан полностью закрыт, на основании расстояния, проходимого приводным валом перед остановкой электрического двигателя при закрывании клапана.
16. Способ по п. 12, дополнительно включающий в себя:
мониторинг тока, потребляемого электрическим двигателем, когда электрический двигатель перемещает элемент регулирования потока;
сравнение тока, потребляемого электрическим двигателем, с эталонным током;
если ток, потребляемый электрическим двигателем, больше, чем эталонный ток, по меньшей мере с учетом первого порогового значения, создание предупреждающего сигнала, чтобы указывать по меньшей мере на одну из неисправностей: износ уплотнения, неправильная регулировка уплотнения или излишнее трение клапанного устройства, и
если ток, потребляемый электрическим двигателем, ниже, чем эталонный ток, по меньшей мере с учетом второго порогового значения, создание предупреждающего сигнала, чтобы указывать на низкую нагрузку уплотнения.
17. Способ по п. 12, дополнительно включающий в себя:
мониторинг тока, потребляемого электрическим двигателем, при открывании клапана из полностью закрытого положения;
вычисление разности между пиком тока, потребляемого электрическим двигателем, и пиком эталонного тока, и
если разность превышает пороговое значение, создание предупреждающего сигнала для указания на неисправность клапанного устройства.
18. Способ по п. 12, дополнительно включающий в себя:
определение расстояния, проходимого приводным валом, когда электрический двигатель останавливается;
вычисление разности между расстоянием, проходимым приводным валом, и эталонным расстоянием;
если разность превышает пороговое значение, создание предупреждающего сигнала для указания по меньшей мере на одну из неисправностей: пружины или клапанного устройства.
19. Способ по п. 18, дополнительно включающий в себя:
мониторинг разностей между расстоянием, проходимым приводным валом, и эталонным расстоянием во время ряда последовательных ходов клапана, и
создание предупреждающего сигнала для указания на одну из неисправностей: пружины или клапанного устройства на основании скорости, с которой изменяются разности.
20. Способ по п. 12, дополнительно включающий в себя:
мониторинг тока, потребляемого электрическим двигателем, когда электрический двигатель нагружает внутреннюю нагрузочную пружину;
сравнение тока, потребляемого электрическим двигателем, с эталонным током;
если разность между током, потребляемым электрическим двигателем, и эталонным током превышает пороговое значение, создание предупреждающего сигнала для указания на неисправность пружины.
21. Материальный машиночитаемый запоминающий носитель, содержащий инструкции, которые при их исполнении обуславливают машину осуществлять по меньшей мере следующее:
мониторить расстояние, проходимое приводным валом, связанным с электрическим двигателем электрического привода клапана, используемым для управления клапаном;
мониторить положение элемента регулирования потока клапана посредством датчика положения клапана, связанного с приводом, и
создавать предупреждающий сигнал на основе расстояния, проходимого приводным валом, и положения элемента регулирования потока, причем предупреждающий сигнал указывает, связана ли неисправность с приводом клапана или с клапаном.
22. Носитель по п. 21, в котором инструкции при их исполнении, кроме того, обуславливают машину осуществлять следующее:
определять измеренное положение элемента регулирования потока, когда клапан полностью закрыт, на основе по меньшей мере одного из следующего: положения элемента регулирования потока, когда клапан останавливает перемещение, или расстояния, проходимого приводным валом, перед тем как электрический двигатель останавливается при закрывании клапана;
вычислять разность между измеренным положением элемента регулирования потока и эталонным положением и
создавать предупреждающий сигнал на основании разности, чтобы указывать на неисправность клапанного устройства.
23. Носитель по п. 21, в котором инструкции при их исполнении, кроме того, обуславливают машину осуществлять следующее:
мониторить ток, потребляемый электрическим двигателем, когда электрический двигатель перемещает элемент регулирования потока;
сравнивать ток, потребляемый электрическим двигателем, с эталонным током;
если ток, потребляемый электрическим двигателем, больше, чем эталонный ток, по меньшей мере с учетом первого порогового значения, создавать предупреждающий сигнал, чтобы указывать по меньшей мере на одно из следующего: износ уплотнения, неправильная регулировка уплотнения или излишнее трение клапанного устройства, и
если ток, потребляемый электрическим двигателем, ниже, чем эталонный ток, по меньшей мере с учетом второго порогового значения, создавать предупреждающий сигнал, чтобы указывать на низкую нагрузку уплотнения.
24. Носитель по п. 21, в котором инструкции при их исполнении, кроме того, обуславливают машину осуществлять следующее:
определять расстояние, проходимое приводным валом, когда электрический двигатель останавливается;
вычислять разность между расстоянием, проходимым приводным валом, и эталонным расстоянием;
если разность превышает пороговое значение, создавать предупреждающий сигнал для указания по меньшей мере на одно из следующего: пружины или клапанного устройства.
25. Носитель по п. 24, в котором инструкции при их исполнении, кроме того, обуславливают машину осуществлять следующее:
мониторить разности между расстоянием, проходимым приводным валом, и эталонным расстоянием во время ряда последовательных ходов клапана и
создавать предупреждающий сигнал для указания на одну из неисправностей: пружины или клапанного устройства на основании скорости, с которой изменяются разности.
26. Носитель по п. 21, в котором инструкции при их исполнении, кроме того, обуславливают машину осуществлять следующее:
мониторить ток, потребляемый электрическим двигателем, когда электрический двигатель нагружает внутреннюю нагрузочную пружину;
сравнивать ток, потребляемый электрическим двигателем, с эталонным током;
если разность между током, потребляемым электрическим двигателем, и эталонным током превышает пороговое значение, создавать предупреждающий сигнал для указания на неисправность пружины.
| Колосоуборка | 1923 |
|
SU2009A1 |
| СПОСОБ ДИАГНОСТИКИ ОБНАРУЖЕНИЯ ОТКАЗА КОМПОНЕНТА РЕГУЛИРУЮЩЕГО КЛАПАНА | 2009 |
|
RU2493467C2 |
| US 4694390 A, 15.09.1987 | |||
| УСОВЕРШЕНСТВОВАННЫЙ СИЛОВОЙ ПРИВОД КЛАПАНА | 2007 |
|
RU2461039C2 |
| US 4990840 A, 05.02.1991. | |||

