Настоящее изобретение относится к приводам клапанов.
Традиционные приводы клапанов, таких как используемые на летательных аппаратах, например, для управления элементами крыла, состоят из двигателя постоянного тока щеточного типа, который приводит в действие 90° клапан через узел зубчатого редуктора. Положение клапана просто управляется с помощью сигналов управления и приводимых в действие механическим путем микропереключателей на регулируемых пластинах, приводимых в действие посредством кулачка. Скорость, с которой открывается и закрывается клапан, является неуправляемой и изменяется в зависимости от подаваемой нагрузки и напряжения. Это иногда означает, что скорость может изменяться в пределах десятикратной ожидаемой скорости.
Другой недостаток такого традиционного привода заключается в том, что он может перемещать клапан только между двумя положениями: открытым и закрытым, не имея средства для выполнения промежуточных положений. В контроллерах некоторых существующих приводов используются датчики дискретного положения, чтобы определять положение клапана. Такие приводы требуют ручной калибровки перед начальным использованием, при этом традиционные конструкции не являются модульными. Микропереключатели требуют ручной регулировки после сборки и их трудно настроить точно и постоянно. Такие приводы также предрасположены к гистерезису и к проблемам, обусловленным эффектом свободного зазора/гидравлического удара, которые могут возникать, когда существует скачок давления или волна, являющаяся результатом вынужденной остановки текучей среды в движении или неожиданного изменения направления (изменения момента). Кроме того, существующая технология привода может также иметь проблемы с точки зрения неправильной индикации и износа, то есть износ щетки или потеря точности за счет угольной пыли.
Варианты осуществления настоящего изобретения предназначены для решения по меньшей мере некоторых из описанных выше вопросов. В некоторых вариантах осуществления настоящего изобретения микропереключатели были заменены бесконтактными переключателями, например переключателями, работающими на эффекте Холла, датчиками положения, при этом щеточный двигатель постоянного тока заменен на индукционный двигатель переменного тока, приводимый в действие синусоидальным инвертером. Это может обеспечить возможность управления скоростью привода, регулирующего клапан, путем регулирования выходного напряжения и выходной частоты инвертера, чтобы управлять скоростью двигателя переменного тока.
Эта способность может быть дополнительно усилена с помощью бесконтактного датчика, обеспечивающего абсолютное положение клапана, который позволяет контролировать скорость относительно углов открытого клапана и закрытого клапана, что может позволить устранить эффекты гидравлического удара и скачки путем открытия и закрытия клапана управляемым образом.
Соответственно, в одном аспекте настоящее изобретение предусматривает привод клапана, включающий в себя или содержащий:
приводной вал для регулирования при эксплуатации клапана между открытым положением и закрытым положением;
индукционный двигатель переменного тока для приведения в действие приводного вала;
бесконтактный датчик положения, выполненный с возможностью выдачи при эксплуатации сигнала, представляющего (абсолютное) угловое положение приводного вала или клапана; и
контроллер, выполненный с возможностью управления двигателем переменного тока в соответствии с сигналом, выдаваемым датчиком положения.
Контроллер может задавать скорость, с которой двигатель переменного тока приводит в действие приводной вал, в зависимости от положения приводного вала. Контроллер может сохранять данные, представляющие по меньшей мере одно угловое положение приводного вала. Данные могут представлять, например, положение «клапан полностью закрыт», положение «клапан полностью открыт» и/или промежуточное(ые) положение(я). Контроллер может быть выполнен с возможностью изменения скорости, с которой двигатель переменного тока приводит в действие вал между упомянутыми сохраненными угловыми положениями приводного вала. Контроллер может быть выполнен с возможностью изменения скорости, с которой двигатель переменного тока приводит в действие приводной вал, в соответствии с внешними сигналами/измерениями, такими как сигнал на основании давления.
Контроллер может быть выполнен с возможностью управления множеством разных применений приводов клапана. Для каждого применения упомянутого клапана контроллер может сохранять данные для изменения скорости регулирования приводного вала между конкретными угловыми положениями для упомянутого клапана или упомянутого приводного вала.
Контроллер может проверять положение, выдаваемое датчиком положения, путем циклического изменения электроэнергии, подаваемой на датчик положения, между показаниями.
Привод может дополнительно включать в себя по меньшей мере одно (магнитное, с одним полюсом) реле с блокировкой для формирования при эксплуатации логического сигнала, представляющего открытое/закрытое положение клапана.
Датчик положения может содержать подвижный компонент, такой как магнит, который может быть закреплен на зубчатом колесе в трансмиссии/коробке передач для приводного вала. Бесконтактный датчик положения может включать в себя датчик, работающий на эффекте Холла.
Привод может быть выполнен с возможностью работы с интерфейсом выбора положения привода. Привод может включать в себя схему управления, которая выполнена с возможностью периодического моментального включения интерфейса направления летательного аппарата, чтобы содействовать устранению эффектов высоких токов утечки в твердотельных прерывателях цепей в интерфейсе выбора положения привода.
В другом аспекте настоящее изобретение предусматривает контроллер привода клапана, включающий в себя:
устройство, выполненное с возможностью приема сигнала от бесконтактного датчика положения, выполненного с возможностью выдавать при эксплуатации сигнал, представляющий угловое положение приводного вала или клапана, и устройство, выполненное с возможностью управления индукционным двигателем переменного тока, который при эксплуатации приводит в действие приводной вал, в соответствии с сигналом, выдаваемым датчиком положения.
В другом аспекте настоящее изобретение предусматривает способ управления приводным валом для регулирования при эксплуатации клапана между открытым положением и закрытым положением, причем способ включает в себя этапы, на которых:
принимают сигнал от бесконтактного датчика положения, выполненного с возможностью выдачи при эксплуатации сигнала, представляющего (абсолютное) угловое положение приводного вала или клапана, управляют индукционным двигателем переменного тока, который при эксплуатации приводит в действие приводной вал, в соответствии с сигналом, выдаваемым датчиком положения.
Притом что изобретение было описано выше, оно распространяется на любое сочетание или часть сочетания любых из признаков согласно изобретению, описанных в настоящем документе по отдельности или совместно с другими.
Теперь будут описаны лишь в качестве примера два конкретных варианта осуществления настоящего изобретения со ссылкой на сопровождающие чертежи, на которых:
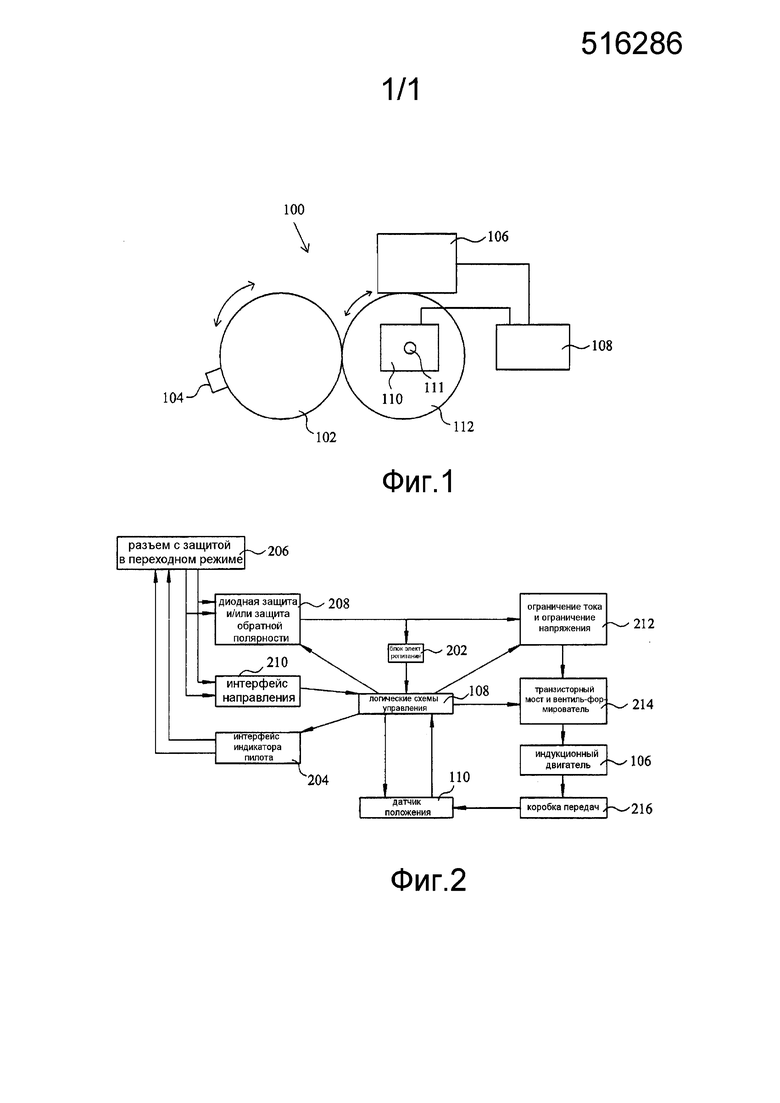
Фиг. 1 представляет собой схематичную иллюстрацию примера привода клапана.
Фиг. 2 представляет собой блок-схему архитектуры привода клапана.
Как видно на фиг. 1, показан схематичный вид привода 100, приведенного в качестве примера. Привод включает в себя основной приводной вал 102, который может вращаться с возможностью перемещения клапана 104 между закрытым положением и открытым положением. Приводной вал приводится в движение индукционным двигателем 106 переменного тока, который соединен с контроллером 108, который будет обычно содержать программируемую вентильную матрицу, такую как AGL125 V2-QN1321, изготавливаемую корпорацией Microsemi. Также с контроллером соединен бесконтактный датчик 110 положения. В приведенном примере датчик положения основан на эффекте Холла и включает в себя магнитный компонент 111, который соединен с зубчатым колесом 112 в трансмиссии, которая перемещает основной приводной вал; однако следует понимать, что это может изменяться, например, считывающий положение компонент может быть непосредственно соединен с основным валом, клапаном или одним или более зубчатыми колесами в трансмиссии, содержащей различные зубчатые колеса. Также следует понимать, что могут быть использованы другие типы бесконтактных устройств, считывающих положения, например технология датчика бесконтактного линейного смещения постоянного магнита (PLCD). Рассмотрим более детально датчик 110 положения, причем этот датчик обычно содержит интегральную микросхему (имеющую размеры, например, 6×6×1 мм) в дополнение к подвижному магнитному считывающему компоненту. Примером соответствующего датчика, работающего на эффекте Холла, является АМ256Q от RLS/Renishaw в сочетании с магнитным компонентом RMM44A2C00 (цилиндрическое тело, имеющее размеры, например, 4 мм в диаметре, 4 мм по высоте, например, с магнитом 605 Гаусса, но необходимо понимать, что это может изменяться). Схема прикреплена к корпусу привода (не показано), в то время как магнитный компонент прикреплен к зубчатому колесу 112 в трансмиссии. Как только вал поворачивается, приложенное к цепи магнитное поле тоже поворачивается. Схема включает в себя группу мозаичных элементов, работающих на эффекте Холла, и каждый мозаичный элемент создает напряжение, которое зависит от приложенного к нему магнитного поля. Дифференциальное напряжение от мозаичных элементов определяет абсолютное положение магнитного компонента по отношению к схеме.
Использование датчика положения, работающего на эффекте Холла, имеет преимущества с точки зрения устранения необходимости ручной калибровки/регулировки, которая является требованием при использовании микропереключателей, и уменьшения эффектов люфта. Он также обеспечивает сигнал, способный указывать многочисленные положения в качестве стандарта, которые, как описано выше, могут обеспечивать изменение скорости приводного вала, так что она зависит от углового положения. Кроме того, датчик положения является бесконтактным, устойчив к загрязнению, а также нечувствителен к магнитным полям. Такой датчик имеет также низкие требования к питанию (например, 23 мВт в непрерывном режиме, <1 мВт в дискретном режиме). Сигнал, выдаваемый датчиком 110 на контроллер 108, может быть проверен путем циклического изменения электроэнергии, подаваемой на датчик контроллером между показаниями.
Поэтому датчик положения, работающий на эффекте Холла, является устройством абсолютного положения и в случае прерывания подачи энергии к приводу будет, как правило, восстанавливать свое положение при возобновлении подачи энергии. Однако, если системные требования таковы, что привод имеет независимые линии сигнала открыть/закрыть, которые дают высокий/низкий логический уровень сигнала (как может быть в случае с системами летательного аппарата), тогда это может быть достигнуто путем добавления герметичных однополюсных магнитных реле с блокировкой, которые являются маленькими и надежными и могут удерживать реле закрытыми, даже если подача энергии к реле закончилась. Рассмотрим более подробно индукционный двигатель 106 переменного тока, который обычно содержит отлитый под давлением алюминиевый ротор и защищенный от внешних воздействий трехфазный статор. Он может приводиться в действие с помощью электронного синусоидального привода с переменной частотой/напряжением, с возможностью регулируемой скорости привода и динамическим торможением. Скорость может быть независимой от подачи напряжения. Авторы изобретения обнаружили, что индукционный двигатель имеет преимущества перед традиционными бесщеточными электродвигателями с постоянными магнитами вследствие низкой стоимости, простоты и большей надежности.
На фиг. 2 показан пример архитектуры привода клапана с использованием описанных выше принципов. Датчик 110 положения находится в сообщении с контроллером 108, который получает энергию от блока 202 подачи энергии. Контроллер также соединен с интерфейсом 204 индикатора пилота, который соединен с разъемом 206 для защиты в переходном режиме. В некоторых случаях защита в переходном режиме может быть на печатной схеме вместо разъема. Разъем также соединен с блоком 208 диодной защиты или защиты обратной полярности и интерфейсом 210 направления. Контроллер может принимать данные от интерфейса направления и передавать сигналы на блок защиты полярности. Контроллер может также передавать сигналы на блок 212 ограничения тока или ограничения напряжения, а также на транзисторный мост или вентиль-формирователь 214, который также осуществляет связь с блоком 212 ограничения. Транзисторный мост/вентиль-формирователь может управлять индукционным двигателем 106 переменного тока и соединен с коробкой передач 216, которая включает в себя по меньшей мере одно зубчатое колесо, положение которого отслеживается датчиком 110 положения. В некоторых вариантах осуществления настоящего изобретения привод может принимать требуемые сигналы положения привода и передавать положение привода, используя последовательную шину данных.
Варианты осуществления привода могут быть используемы с интерфейсом выбора положения. Если в летательном аппарате используются твердотельные прерыватели цепи для выбора требуемого положения привода, они обычно имеют высокий ток утечки в состоянии ВЫКЛЮЧЕНО. Этот высокий ток утечки может побуждать привод ошибочно идентифицировать состояние ВЫКЛЮЧЕНО как состояние ВКЛЮЧЕНО. Схема управления может компенсировать это, хотя также поддерживает потребление энергии на минимуме. Это может быть сделано путем периодического моментального включения интерфейса направления. Цепь интерфейса может быть цепью низкого сопротивления, которая устраняет эффекты высокого тока утечки.
Описанные в настоящем документе варианты осуществления настоящего изобретения могут по меньшей мере частично устранить проблемы, описанные во введении к описанию. Конструкция привода является гибкой и может позволить использовать один привод во многих применениях. Это может быть достигнуто путем программирования скорости открытия/закрытия привода, чтобы она соответствовала конкретным применениям/разным клапанам. Например, контроллер может быть выполнен с возможностью установления скорости, с которой двигатель переменного тока приводит в действие приводной вал, в зависимости от положения приводного вала. Контроллер может сохранять данные, представляющие по меньшей мере одно угловое положение приводного вала. Данные могут представлять собой, например, положение «клапан полностью закрыт», «клапан полностью открыт» и/или промежуточное(ые) положение(я). Контроллер может быть выполнен с возможностью изменения скорости, с которой двигатель переменного тока приводит в действие приводной вал между упомянутыми сохраненными угловыми положениями приводного вала. Контроллер может иметь таблицу поиска или т.п., что сохраняет данные, включая положение (положения) клапана и соответствующую скорость/скорости приведения в действие для множества применений. Также следует понимать, что возможны дополнительные изменения, например скорость приведения в действие может быть изменена в соответствии с внешними сигналами/измерениями, такими как показания манометра. Кроме того, узел отслеживания привода может быть использован для отслеживания привода с разным числом положений, например четырехпозиционного привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ЭКСПЛУАТАЦИОННЫХ ИСПЫТАНИЙ ПНЕВМАТИЧЕСКИХ УСИЛИТЕЛЕЙ СИГНАЛА | 2017 |
|
RU2749388C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕГУЛЯТОРОМ ДАВЛЕНИЯ НАДДУВА ТУРБОНАГНЕТАТЕЛЯ ДВИГАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ТУРБОНАГНЕТАТЕЛЕМ ДВИГАТЕЛЯ | 2013 |
|
RU2639826C2 |
| МАЛОГАБАРИТНЫЙ ЭЛЕКТРОПОГРУЗЧИК | 2012 |
|
RU2539442C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ДИАГНОСТИКИ КЛАПАНА С ИСПОЛЬЗОВАНИЕМ ЭЛЕКТРИЧЕСКИХ ПРИВОДОВ КЛАПАНА | 2014 |
|
RU2674824C1 |
| ОЦЕНИВАНИЕ ТЕМПЕРАТУРЫ ЭЛЕКТРИЧЕСКОГО ПРИВОДА | 2015 |
|
RU2679366C2 |
| СВЯЗЬ НА МЕСТЕ В РЕАЛЬНОМ ВРЕМЕНИ ЧЕРЕЗ ИНТЕРНЕТ С ДИСПЕТЧЕРОМ СКВАЖИНЫ ДЛЯ ПОСТОЯННОЙ ОПТИМИЗАЦИИ СКВАЖИНЫ | 2008 |
|
RU2510971C2 |
| УСОВЕРШЕНСТВОВАННЫЙ СИЛОВОЙ ПРИВОД КЛАПАНА | 2007 |
|
RU2461039C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ НАГРЕВАНИЯ ТАБАКА | 2019 |
|
RU2823669C2 |
| ГЕНТРИ ДЛЯ СИСТЕМЫ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2009 |
|
RU2543494C2 |
| ПОГРУЗОЧНАЯ МАШИНА И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2016 |
|
RU2720393C2 |
Привод клапана включает в себя приводной вал для регулирования при эксплуатации клапана между открытым положением и закрытым положением, индукционный двигатель переменного тока для приведения в действие приводного вала, бесконтактный датчик положения, выполненный с возможностью выдачи при эксплуатации сигнала, представляющего угловое положение приводного вала или клапана, и контроллер, выполненный с возможностью управления двигателем переменного тока в соответствии с сигналом, выдаваемым датчиком положения. Технический результат – устранение предрасположенности к гистерезису и к проблемам, обусловленным эффектом свободного зазора и гидравлического удара, возникающих при скачках давления или волне от вынужденной остановки текучей среды для привода клапана. 3 н. и 13 з.п. ф-лы, 2 ил.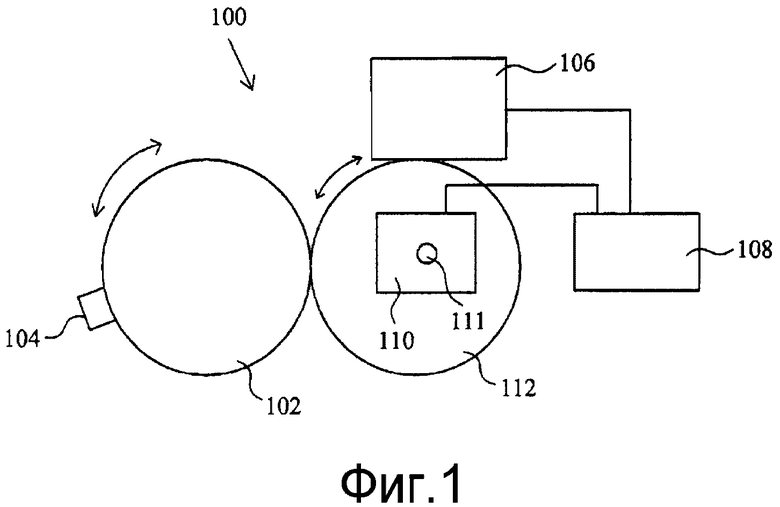
1. Привод (100) клапана, включающий в себя:
приводной вал (102), выполненный с возможностью регулирования клапана (104) при эксплуатации между открытым положением и закрытым положением;
индукционный двигатель (106) переменного тока, выполненный с возможностью приведения в действие приводного вала;
бесконтактный датчик (110) положения, выполненный с возможностью выдачи при эксплуатации сигнала, представляющего угловое положение приводного вала или клапана; и
контроллер (108), выполненный с возможностью управления двигателем переменного тока в соответствии с сигналом, выдаваемым датчиком положения,
причем контроллер (108) задает скорость, с которой двигатель (106) переменного тока приводит в действие приводной вал (102), в зависимости от положения приводного вала,
при этом контроллер (108) дополнительно выполнен с возможностью сохранения данных, представляющих множество угловых положений приводного вала, и изменения скорости, с которой двигатель (106) переменного тока приводит в действие приводной вал (102) между упомянутыми сохраненными угловыми положениями приводного вала.
2. Привод клапана по п. 1, в котором данные представляют по меньшей мере одно из положения «клапан полностью закрыт», положения «клапан полностью открыт» и промежуточного положения.
3. Привод клапана по п. 1, в котором контроллер (108) выполнен с возможностью изменения скорости, с которой двигатель (106) переменного тока приводит в действие приводной вал (102), в соответствии по меньшей мере с одним из внешнего сигнала и внешнего измерения.
4. Привод клапана по п. 1, в котором контроллер (108) выполнен с возможностью изменения скорости, с которой двигатель (106) переменного тока приводит в действие приводной вал (102), в соответствии по меньшей мере с двумя внешними сигналами.
5. Привод клапана по п. 3, в котором упомянутое по меньшей мере одно из внешнего сигнала и внешнего измерения представляет собой показание давления.
6. Привод клапана по п. 1, в котором контроллер (108) выполнен с возможностью управления множеством разных применений привода клапана.
7. Привод клапана по п. 6, в котором для каждого применения упомянутого привода клапана контроллер (108) сохраняет данные для изменения скорости регулирования приводного вала между конкретными угловыми положениями для упомянутого клапана (104) или упомянутого приводного вала (102).
8. Привод клапана по п. 1, в котором контроллер (108) выполнен с возможностью проверки положения, выданного датчиком (110) положения, путем циклического изменения электроэнергии, подаваемой на датчик положения, между показаниями.
9. Привод клапана по п. 1, дополнительно содержащий реле с блокировкой, которое выполнено с возможностью формирования при эксплуатации логического сигнала, представляющего открытое положение или закрытое положение клапана (104).
10. Привод клапана по п. 1, в котором датчик (110) положения включает в себя подвижный компонент, который закреплен на зубчатом колесе (112) по меньшей мере в одном из трансмиссии и коробки передач для приводного вала (102).
11. Привод клапана по п. 10, в котором датчик (110) положения включает в себя магнит.
12. Привод клапана по п. 1, в котором датчик (110) положения содержит бесконтактный датчик, работающий на эффекте Холла.
13. Привод клапана по п. 1, в котором привод (103) выполнен с возможностью работы с интерфейсом выбора положения привода.
14. Привод клапана по п. 13, дополнительно содержащий схему управления, которая выполнена с возможностью периодического моментального включения интерфейса (210) направления летательного аппарата, чтобы содействовать устранению эффектов высоких токов утечки в твердотельных прерывателях цепей в интерфейсе выбора положения привода.
15. Контроллер (108) привода клапана, содержащий:
устройство, выполненное с возможностью приема сигнала от бесконтактного датчика (110) положения, причем датчик (110) положения выполнен с возможностью выдачи при эксплуатации сигнала, представляющего угловое положение приводного вала (102) или клапана (104); и
устройство, выполненное с возможностью управления индукционным двигателем (106) переменного тока, причем индукционный двигатель (106) переменного тока выполнен с возможностью приведения в действие приводного вала в соответствии с сигналом, выдаваемым датчиком (110) положения,
причем устройство, выполненное с возможностью управления индукционным двигателем (106) переменного тока, задает скорость, с которой двигатель (106) переменного тока приводит в действие приводной вал (102), в зависимости от положения приводного вала,
при этом устройство, выполненное с возможностью управления индукционным двигателем (106) переменного тока, дополнительно выполнено с возможностью сохранения данных, представляющих множество угловых положений приводного вала, и изменения скорости, с которой двигатель (106) переменного тока приводит в действие приводной вал (102) между упомянутыми сохраненными угловыми положениями приводного вала.
16. Способ управления приводным валом (102), причем приводной вал (102) выполнен с возможностью регулирования клапана (104) при эксплуатации между открытым положением и закрытым положением, причем способ содержит этапы, на которых:
принимают сигнал от бесконтактного датчика (110) положения, выполненного с возможностью выдачи при эксплуатации сигнала, представляющего угловое положение приводного вала или клапана, и
управляют индукционным двигателем (106) переменного тока, причем индукционный двигатель (106) переменного тока выполнен с возможностью приведения в действие приводного вала в соответствии с сигналом, выдаваемым датчиком (110) положения,
причем управление индукционным двигателем (106) переменного тока в соответствии с сигналом, выдаваемым датчиком (110) положения, содержит этапы, на которых:
задают скорость, с которой двигатель (106) переменного тока приводит в действие приводной вал (102), в зависимости от положения приводного вала,
сохраняют данные, представляющие множество угловых положений приводного вала, и
изменяют скорость, с которой двигатель (106) переменного тока приводит в действие приводной вал (102) между упомянутыми сохраненными угловыми положениями приводного вала.
| Способ получения эпоксидных смол | 1974 |
|
SU513994A1 |
| US 4459531 A, 10.10.1984 | |||
| Центробежный электрический насос | 1935 |
|
SU50960A1 |
| US 2009078898 A1, 26.03.2009 | |||
| РАЗГРУЖЕННЫЙ ДИСКОВЫЙ РЕГУЛИРУЮЩИЙ КЛАПАН | 2003 |
|
RU2285183C2 |

