Изобретения относятся к области электротехники, в частности к системам электронного управления электродвигателем, и могут быть использованы для управления электродвигателем постоянного тока.
Из уровня техники известны безредукторные мотор-колеса с непосредственным электромагнитным взаимодействием магнитных систем ротора и статора, вызывающие вращение колеса. Такие электродвигатели являются перспективными для использования в транспортных средствах, не требующих использование механических приводов и коробок передач.
Конструкции мотор-колес делится на две категории, первая категория -коллекторные электродвигатели, вторая категория - бесколлекторные электродвигатели. Бесколлекторные электродвигатели имеют преимущества (по сравнению со щеточными двигателями), в отсутствие токопроводящих элементов скольжения, гибкостью в управление.
Бесколлекторные электродвигатели нашли широкое применение, однако их эксплуатационные характеристики все же требуют улучшения.
Для повышения КПД и крутящего момента в динамике движения пытаются оптимизировать системы управления. Далее рассмотрим патенты, направленные именно для решения данной задачи.
Из уровня техники известны патенты US 6727668 В1 (кл. H02K 21/22, 27.04.2004); US 6791226 (кл. H02K 29/00, 14.09.2004), в которых раскрыты системы электронного управления бесколлекторным электродвигателем, представляющим собой ротор с постоянными магнитами и статор с электромагнитами. При этом система содержит электронный блок управления, силовые полупроводниковые ключи электрически связанные с датчиками положения ротора.
Недостатками данных систем является сложность их конструкций, сложность схем управления, делающих их дорогостоящими и ненадежными в эксплуатации.
Известна система управления бесколлекторным индукторным электродвигателем, раскрытая в патенте RU 2340994 С1 (кл. H02K 23/00, 10.12.2008), содержащая датчик углового положения ротора (в частности датчик Холла), который подает сигнал на электронную схему для запитывания или обесточивания катушек электромагнитов при прохождении мимо них зубцов ротора.
Однако приведенные автором в патенте чертежи не раскрывают принципиальную электрическую схему управления данного электродвигателя. В описании лишь упоминается, что система управления может содержать силовые ключи, часто тиристоры или силовые транзисторы с изолированным затвором, из которых собирается генератор импульсного напряжения, управление которыми обычно реализуется на основе использования микроконтроллера.
Основным недостатком данного патента является низкая эффективность в режиме рекуперации электроэнергии, что приводит к потерям электроэнергии, а в следствии к снижению КПД, и к низкой эффективности использования двигателя при различных режимах эксплуатации.
Из уровня техники известны патенты, решающие проблемы рекуперации электроэнергии: В патенте RU 2290328 (кл. B60K 17/14, 27.12.2006) рассматривается полноприводное транспортное средство с отдельно разгонным и отдельно маршевым двигателем типа мотор-колесо. Система управления в данном патенте не рассмотрена подробно, указано лишь, что электродвигатель содержит датчик углового положения (ДПР), который подает сигнал на электронную схему (не показана), которая переключает полярность питания катушек электромагнитов при прохождении мимо них постоянного магнита соответствующей полярности, источник электропитания и блок управления питанием электромоторов, где каждый из названных электромоторов содержит, по крайней мере, один круговой магнитопровод, на котором закреплено четное количество постоянных магнитов с одинаковым шагом; круговую раму, отделенную от магнитопровода воздушным промежутком и несущую четное число электромагнитов, расположенных попарно напротив друг друга.
Однако данная система имеет ряд недостатков: сложность конструкции, недостаточно эффективное использование и возврат электроэнергии в силу того, что вся схема работает в комплексе, состоящая из отдельных узлов и агрегатов.
Из уровня техники известен электропривод постоянного тока с системой его управления, раскрытый в а.с. №1384170 (Н02Р 5/06, 23.07.1989), в котором коэффициент использования силового источника питания повышается за счет переменной частоты коммутации, максимальное значение которой ограничивается.
Данному электроприводу, и соответственно системе его управления, присущи следующие недостатки:
1) энергия торможения и реверса двигателя рекуперируется в источник питания и не используется в режиме разгона и реверса, что приводит к необходимости применения источника, который бы обеспечил необходимую в этих режимах максимальную мощность, что предъявляет повышенные требования к источнику питания, а это ограничивает область применения устройства;
2) с целью снижения пульсаций скорости применяется переменная частота коммутации силовых ключей, при этом максимальная частота определяется параметрами исполнительного двигателя и параметрами силовых ключей, что ограничивает выбор двигателя постоянного тока и предъявляет повышенные требования к параметрам силовых ключей, то есть ограничивает функциональные возможности устройства.
Все системы управления, раскрытые в вышеуказанных документах содержат общие признаки управления: электронный блок управления, датчики положения роторов и силовые полупроводниковые ключи. Таким образом, любой из вышеуказанных документов, в части признаков управления, может быть принят в качестве наиболее близкого аналога.
Вышеуказанные системы управления электродвигателем имеют один общий и главный недостаток: недостаточно эффективное использование и возврат электроэнергии, а названные электродвигатели имеют низкий крутящий момент, что существенно ограничивает область их практического использования и приводит к невозможности создания универсального эффективного двигателя для различных транспортных средств.
Технической задачей заявленной группы изобретений является разработка системы электронного управления бесколлекторным электродвигателем, обладающей высокой гибкостью и эффективностью управления, которая будет универсальна для различных транспортных средств и обеспечит эффективное использование и возврат электроэнергии, как во время работы, электродвигателя, при его «холостом» ходе, так и при его торможении, повысит КПД электродвигателя и его крутящий момент.
Данная задача решается тем, что система электронного управления бесколлекторным электродвигателем, представляющим собой ротор с постоянными магнитами с чередующимся направлением магнитного поля и статор с индуктивной нагрузкой, выполненной в виде электромагнитов по две катушки с последовательно встречным направлением обмотки, включает электронный блок управления, силовые полупроводниковые ключи, датчики положения ротора, при этом содержит конденсатор, образующий с обмотками электромагнитов резонансный контур, источник питания, выполненный в виде параллельно соединенных аккумуляторной батареи и буферного накопителя суперконденсаторной батареи, при этом источник питания выводами плюс и минус через соединенный Н-мост силовых полупроводниковых ключей с блокирующими диодами и диодный мост подключен к индуктивной нагрузке, а верхние и нижние силовые полупроводниковые ключи Н-моста соединены с драйверами верхних и нижних уровней, связанными с электронным блоком управления, который соединен с датчиком тока, с датчиками положения ротора, ориентированными по осевым линиям постоянных магнитов и через инверторный блок реверса с датчиками положения ротора, ориентированными между осевых линий постоянных магнитов и с устройством изменения ориентации датчиков положения ротора.
Также данная задача решается тем, что система электронного управления бесколлекторным электродвигателем, представляющим собой ротор с постоянными магнитами с чередующимся направлением магнитного поля и статор с индуктивной нагрузкой, выполненной в виде электромагнитов по две катушки с последовательно встречным направлением обмотки, включает электронный блок управления, силовые полупроводниковые ключи, датчики положения ротора, при этом содержит конденсатор, образующий с обмотками электромагнитов резонансный контур, два гальванически развязанных источника питания правого и левого плеча электрической схемы, выполненные в виде параллельно соединенных аккумуляторных батарей и буферных накопителей суперконденсаторных батарей, при этом источники питания выводами плюс и минус подключены через токоограничивающие конденсаторы и диоды с индуктивной нагрузкой, а выходы источников питания подключены к мультивибраторам, соединенным с входами повышающих трансформаторов, выходы которых присоединены к диодным мостам, соединенным с высоковольтными конденсаторами, которые связаны с высоковольтными сторонами конверсионных трубок, низковольтные стороны которых соединены с триодами, которые через управляемые генераторы коротких импульсов связаны с электронным блоком управления, а выходы конверсионных трубок соединены с разрядниками для ограничения перенапряжений и с входами понижающих трансформаторов, выходы которых соединены с силовыми полупроводниковыми ключами, которые через драйверы связаны с электронным блоком управления, который соединен с датчиком тока, с датчиками положения ротора, ориентированными по осевым линиям постоянных магнитов и через инверторный блок реверса с датчиками положения ротора, ориентированными между осевых линий постоянных магнитов, с устройством изменения ориентации датчиков положения ротора, при этом индуктивная нагрузка соединена через блокирующие диоды с силовыми полупроводниковыми ключами.
Кроме того, в частном варианте реализации вышеуказанные варианты систем электронного управления электродвигателем могут работать в режиме электромобиля, при этом электронный блок управления будет соединен, с селектором выбора режима движения, с датчиком скорости, с педалью тормоза, с педалью акселератора, с шунтирующим силовым ключом.
В частных вариантах реализации изобретений, в целях дальнейшего повышения надежности работы системы управления электродвигателем:
- в качестве силовых полупроводниковых ключей могут быть использованы полевые транзисторы с изолированным затвором;
- в качестве датчиков положения ротора могут быть использованы датчики Холла;
- в электродвигателе ротор расположен с внешней стороны статора.
- в электродвигателе ротор расположен внутри статора.
Сущность изобретений поясняется следующими чертежами:
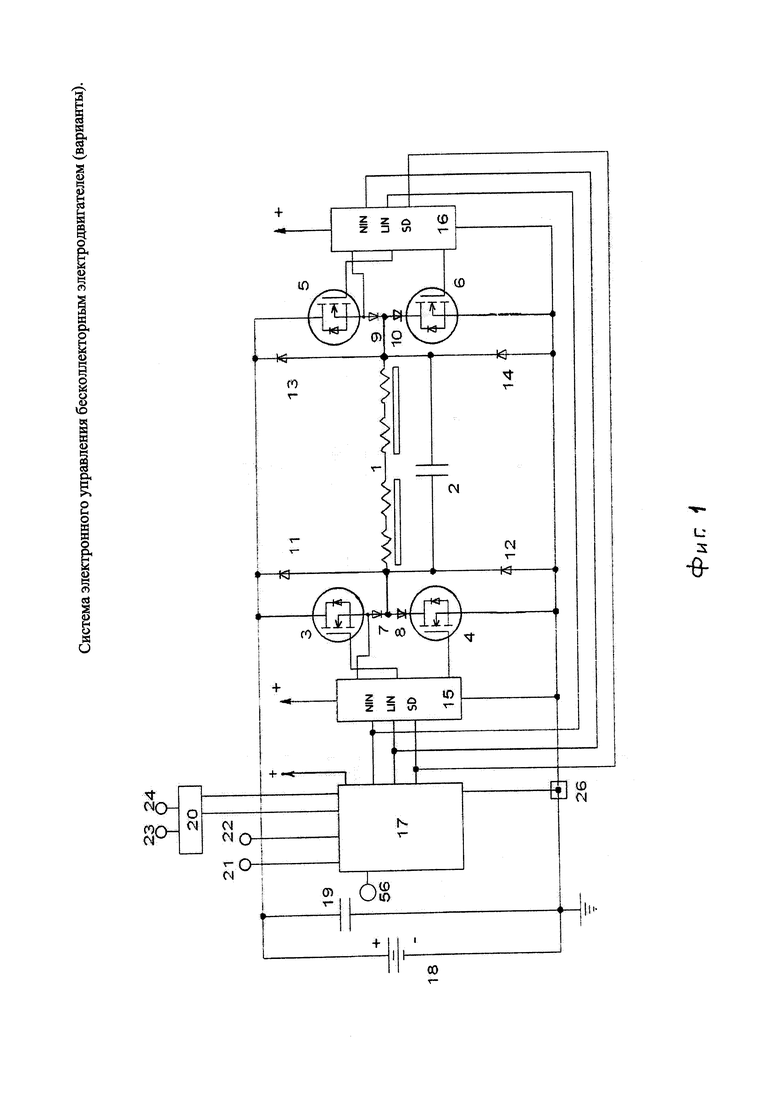
Фигура 1 - изображена принципиальная электрическая схема системы электронного управления бесколлекторным электродвигателем;
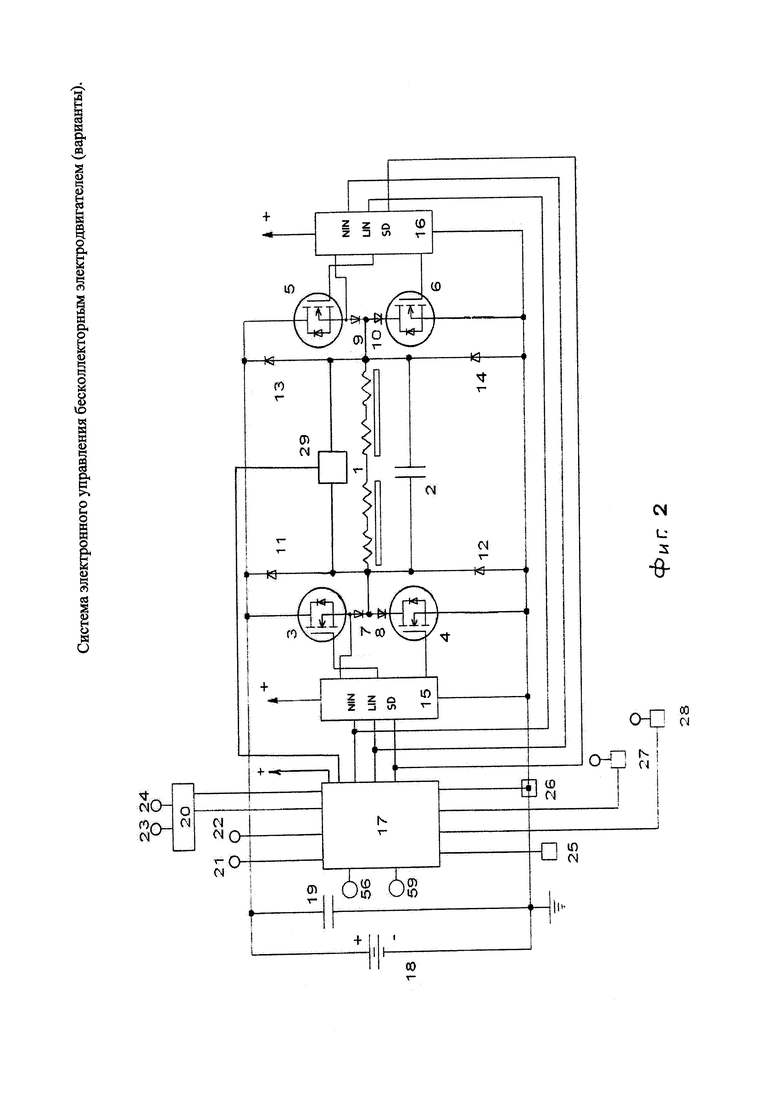
Фигура 2 - изображена принципиальная электрическая схема системы электронного управления бесколлекторным электродвигателем в качестве электропривода электротранспорта;
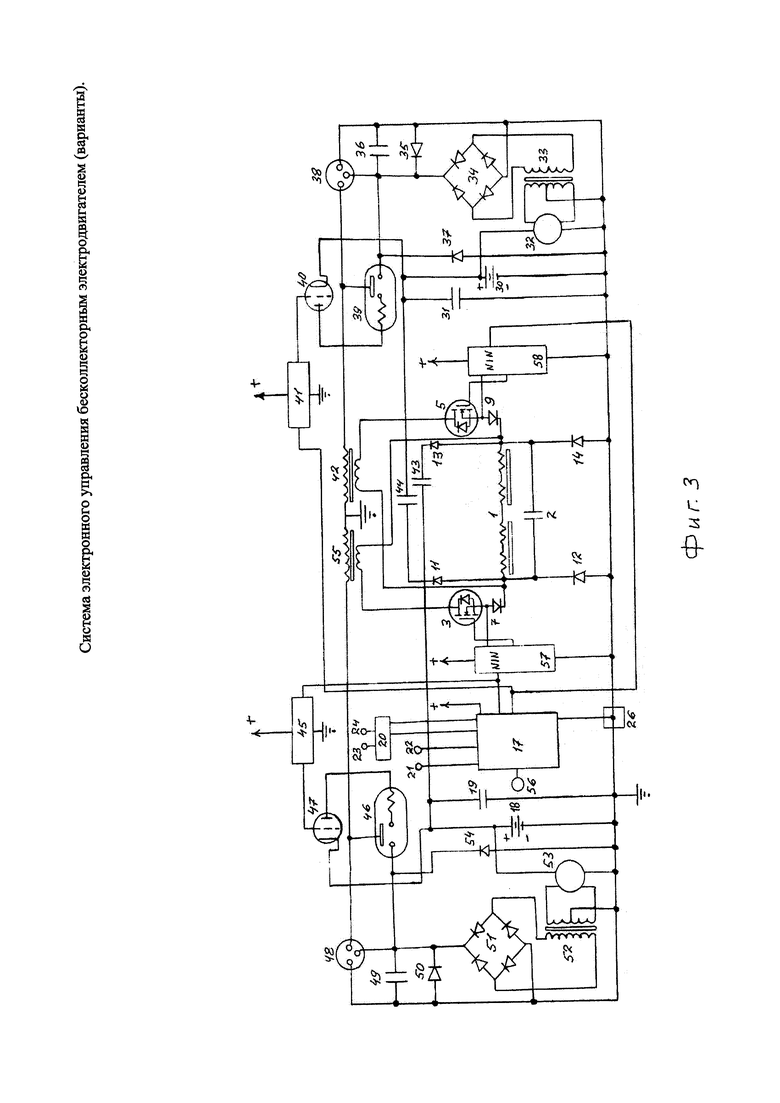
Фигура 3 - изображена принципиальная электрическая схема системы электронного управления бесколлекторным электродвигателем с двумя источниками питания;
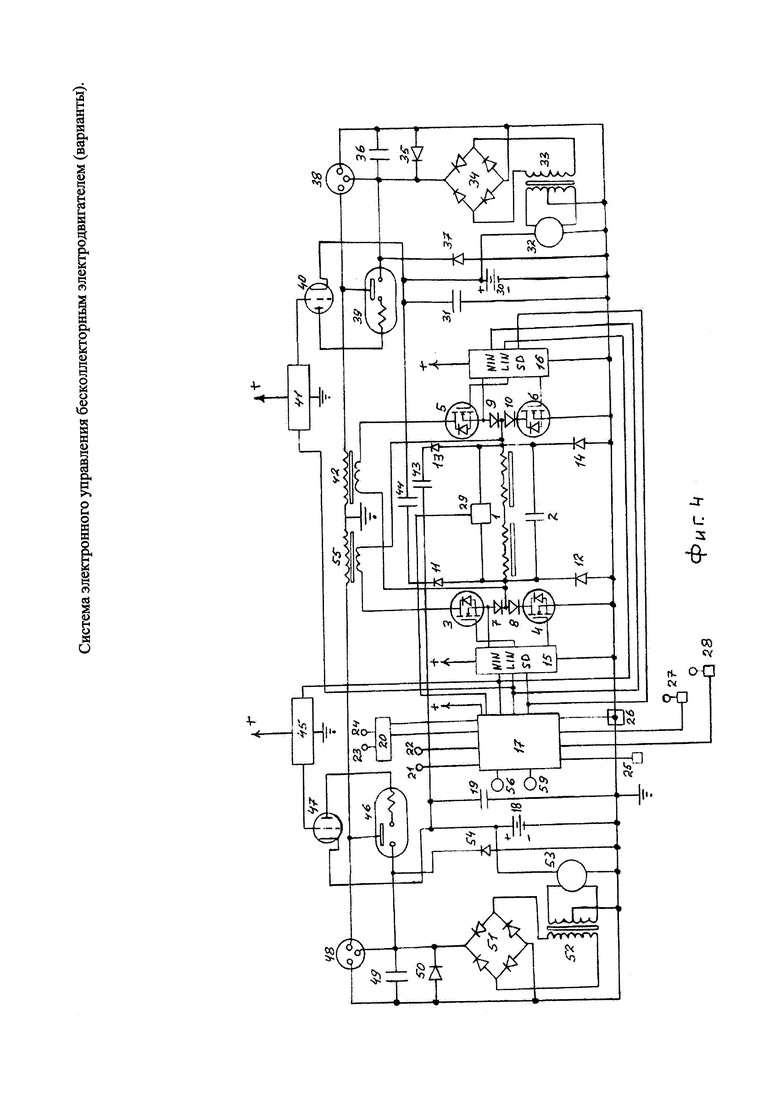
Фигура 4 - изображена принципиальная электрическая схема системы электронного управления бесколлекторным электродвигателем с двумя источниками питания в качестве электропривода электротранспорта.
На представленных фигурах обозначены элементы.
1 - электромагниты, расположенные попарно напротив друга друга и имеющих по две катушки с последовательно-встречным направлением обмотки (одна фаза);
2 - конденсатор резонансный;
3, 4, 5, 6 - силовые полупроводниковые ключи;
7, 8, 9, 10 - блокирующие диоды;
11, 12, 13, 14 - диоды;
15, 16 - драйверы ключей нижнего и верхнего уровней;
17 - электронный блок управления;
18 - аккумуляторная батарея;
19 - суперконденсаторная батарея (ионистр);
20 - инверторный блок реверса;
21, 22 - датчики положения ротора, ориентированные по осевым линиям постоянных магнитов;
23, 24 - датчики положения ротора, ориентированные между осевых линий постоянных магнитов;
25 - датчик скорости;
26 - датчик тока;
27 - педаль тормоза;
28 - педаль акселератора.
29 - шунтирующий силовой ключ;
30 - аккумуляторная батарея правого плеча системы управления;
31 - суперконденсаторная батарея (ионистр) правого плеча системы управления;
32(53) - мультивибраторы;
33(52) - повышающие трансформаторы;
34(51) - диодные мосты;
35, 37(50,54) - диоды, для защиты цепи;
36(49) - высоковольтные конденсаторы;
38(48) - разрядники, для ограничения перенапряжений;
39(46) - конверсионные трубки Эдвина Грея;
43,44 - токоограничивающие конденсаторы;
40(47) - триоды;
41(45) - управляемые генераторы коротких импульсов (до 50 мкс);
42(55) - понижающие трансформаторы;
56 - устройство изменения ориентации датчиков положения ротора;
57, 58 - драйверы ключей верхнего уровня;
59 - селектор выбора режима движения. Примечание:
SD - вход выключения драйвера;
NIN - логический вход управления выходом драйвера верхнего уровня;
LIN - логический вход управления выходом драйвера нижнего уровня.
Рассмотрим функционирование варианта исполнения принципиальной электрической схемы системы электронного управления бесколлекторным электродвигателем, показанной на фигуре 1-2.
Далее рассмотрим режим работы заявленной схемы системы электронного управления бексоллекорным электродвигателем применительно в качестве электропривода электротранспорта (электромобиль).
Система электронного управления выполняет функцию автоматической коробки передач (АКПП) в трансмиссии классического автомобиля при переключении с пониженной передачи на повышенную передачу, и обратно.
При разгоне электромобиля, индуктивная нагрузка бесколлекторного электродвигателя включена системой электронного управления на весь период сектора взаимодействия с постоянными магнитами ротора.
Принцип действия бесколлекторного электродвигателя широко известен из уровня техники и аналогичен традиционному электродвигателю постоянного тока и основан на силах электромагнитного притяжения и отталкивания, возникающих при взаимодействии ротора с постоянными магнитами с индуктивной нагрузкой статора, выполненной в виде электромагнитов. При прохождении электромагнитом положения, когда его ось расположена между осями постоянных магнитов, катушки электромагнита запитаны так, что создают магнитный полюс, противоположный полюсу последующего в направлении вращения постоянного магнита и одноименный с полюсом предыдущего постоянного магнита. Таким образом, электромагнит одновременно отталкивается от предыдущего и притягивается к последующему постоянному магниту. С увеличением скорости электромобиля потребность в максимальном крутящем моменте уменьшается и, соответственно, электронный блок управления 17, получая сигналы об уменьшении потребления тока с датчика тока 26, увеличения скорости с датчика скорости 25, и положении педали акселератора 28 начинает уменьшать период включенного состояния фаз, соответственно увеличивается период выключенного состояния до переключения полярности, тем самым, обеспечивая рекуперацию электроэнергии. Во время выключенного состояния фаз это положение постоянные магниты проходят по инерции и за счет «тяги» других фаз, геометрически сдвинутых относительно друг друга. При уменьшении периода включенного состояния фаз, соответственно автоматически увеличивается период рекуперации электроэнергии как ЭДС индукции, так и противо - ЭДС, т.е. электродвигатель параллельно работает как генератор, причем постоянно в динамическом режиме, а не только при торможении. При переводе селектора выбора режима движения 59 в положение «D», электронный блок управления 17 получая сигналы от датчиков положения ротора 23, 24, (причем 23 включается, когда на него воздействует северный полюс магнита, а датчик положения ротора 24 включается, когда на него воздействует южный полюс магнита) подает питание на драйвера ключей нижнего и верхнего уровней 15, 16, которые в свою очередь открывают силовые полупроводниковые ключи 4, 5 для питания индуктивной нагрузки одной полярности и открывает силовые полупроводниковые ключи 3, 6, для питания индуктивной нагрузки противоположной полярности. Таким образом, все фазы подключаются к источнику питания, состоящему из параллельно соединенных аккумуляторной батареи 18 и буферного накопителя суперконденсаторной батареи 19. Нажатием на педаль акселератора 28 можно начинать или продолжать движение. При «холостом» ходе, т.е. отпущенной педали акселератора 28 в движении, будет происходить почти полный режим генерации, будут присутствовать только кратковременные импульсы на отталкивание, осуществляемые посредством датчиков положения ротора 21, 22 (причем 21 включается, когда на него воздействует северный полюс магнита, а датчик положения ротора 22 включается, когда на него воздействует южный полюс магнита) ориентированные по центру осевых линий постоянных магнитов, способствующие включению электронным блоком управления 17 через драйверы 15, 16 соответственно силовых полупроводниковых ключей 5, 4 или силовых полупроводниковых ключей 3, 6 электрической схемы, чтобы постоянные магниты проскакивали положения совмещения с электромагнитами индуктивной нагрузки электродвигателя (не прилипали и не препятствовали «холостому» ходу), и при этом, продолжая вращаться не только по инерции, но и притягиваясь к электромагнитам имеющие остаточную намагниченность, генерировали электрический ток. При переводе селектора выбора режима движения 59 в нейтральное положение «N», система электронного управления электродвигателем посредством электронного блока управления 17 через драйверы 15, 16 и силовые полупроводниковые ключи 3, 6 и 4, 5 выключает питание всех фаз. Если нейтральное положение включено в движении, и так как все фазы соединены с системой питания через диоды, соединенные по мостовой схеме (11, 12, 13, 14), то происходит рекуперация ЭДС индукции в схему питания (источник питания, выполненный в виде параллельно соединенных аккумуляторной батареи 18 и буферного накопителя суперконденсаторной батареи 19). При легком нажатии на педаль тормоза 27 в динамическом движении, система электронного управления также выключает переключение полярностей всех фаз и так как все фазы соединены с системой питания через диоды, соединенные по мостовой схеме (11, 12, 13, 14), также рекуперируемая электроэнергия поступает в схему питания. При сильном нажатии на педаль тормоза в движении, электронный блок управления 17 дополнительно включает шунтирующий силовой ключ 29 всех фаз, тем самым шунтируя обмотки электромагнитов 1 для электрического динамического торможения параллельно с работой тормозных колодок. При переводе селектора выбора режима движения 59 в положение «R» инверторный блок реверса 20 инвертируя сигналы с датчиков положения ротора 23, 24 способствуют изменению на противоположную полярность в каждой фазе электродвигателя и, соответственно, противоположному вращению вала электродвигателя. Во время крейсерской скорости периоды включенного состояния фаз уменьшены по сравнению с периодами 100% - го включенного состояния фаз во время разгона. Таким образом автоматически электродвигатель переходит из разгонного режима работы в маршевый режим и обратно. Буферный накопитель суперконденсаторная батарея 19 подключена параллельно к аккумуляторной батарее 18 для накопления рекуперируемой электроэнергии как ЭДС индукции, так и противо - ЭДС во время торможения и в динамическом режиме, а также для уменьшения пульсаций тока аккумулятора. Таким образом, система электронного управления бесколлекторным электродвигателем позволяет совмещать в себе все преимущества разгонного, маршевого электродвигателя и генератора одновременно.
Представленная на фиг. 1 система электронного управления бесколлекторным электродвигателем рассматривается как универсальная система, которую можно применять в любой области, а именно в области электрических приводов транспортных средств, в частности скутеров, мотоциклов, электромобилей, вертолетов, самолетов и в промышленном оборудовании.
При этом система аналогична, описанной выше для фигуры 2, отличием является то, что электронный блок управления 17 не содержит селектор выбора режима движения 59, датчик скорости 25, педаль тормоза 27, педаль акселератора 28, шунтирующий силовой ключ 29.
Рассмотрим функционирование варианта исполнения принципиальной электрической схемы системы электронного управления бесколлекторным электродвигателем, показанной на фигуре 3.
Система питания состоит из отдельных гальванически развязанных источников питания, а именно, правого плеча электрической схемы, выполненного в виде параллельно соединенных аккумуляторной батареи 30 и буферного накопителя суперконденсаторной батареи 31 и левого плеча электрической схемы выполненного в виде параллельно соединенных аккумуляторной батареи 18 и буферного накопителя суперконденсаторной батареи 19, которые в зависимости от смены полярности питания индуктивной нагрузки бесколлекторного электродвигателя, попеременно питают электрические схемы, производящие высокоэнергетические импульсы, которые в свою очередь коммутируются соответственно ключами 3 и 5 с индуктивной нагрузкой электродвигателя, выполненной в виде электромагнитов по две катушки с последовательно встречным направлением обмотки. Датчик положения ротора 23, ориентированный между осевыми линиями постоянных магнитов, включается и подает сигнал, когда на него воздействует северный полюс магнита и способствуют включению электронным блоком управления 17 через драйвер ключей верхнего уровня 58 правого силового полупроводникового ключа 5. Датчик положения ротора 24, ориентированный между осевыми линиями постоянных магнитов, включается и подает сигнал, когда на него воздействует южный полюс магнита и способствуют включению электронным блоком управления 17 через драйвер ключей верхнего уровня 57 левого силового полупроводникового ключа 3. Соответственно происходит смена полярности питания индуктивной нагрузки бесколлекторного электродвигателя.
Рассмотрим работу правого плеча электрической схемы (работа левого плеча электрической схемы идентична). При включении правого плеча электрической схемы электронный блок управления 17 подает сигнал на включение правого управляемого генератора коротких импульсов 41 и одновременно на включение драйвера 58 силового полупроводникового ключа 5. Аккумуляторная батарея правого плеча системы управления 30 параллельно с суперконденсаторной батареей 31 питает мультивибратор 32, вырабатывающий импульсы для низковольтной обмотки повышающего трансформатора 33. Соответственно импульсным током низковольтной обмотки в высоковольтной обмотке наводится высокое напряжение. Далее выпрямленный ток диодным мостом 34 направляется на зарядку высоковольтного конденсатора 36. Триод 40, получив кратковременный сигнал от управляемого генератора коротких импульсов 41 способствует разряжению высоковольтного конденсатора 36 вызывающего искровой разряд в конверсионной трубке 39. При этом диоды 35, 37 и разрядник 38 являются элементами защиты от перегрузок. Сгенерированная волна радиантной энергии направляется на понижающий трансформатор 42, который в свою очередь подключается силовым полупроводниковым ключом 5 правого плеча электрической схемы с индуктивной нагрузкой электродвигателя. Высоковольтный конденсатор 36 не разряжается полностью, т.к. для этого недостаточно времени в связи с кратковременностью искрового разряда. Индуктивная нагрузка электродвигателя продолжает питаться серией импульсов энергии (длительностью которых управляет электронный блок), пока поступивший сигнал с датчика положения ротора 23 в электронный блок управления 17 не отключит правое плечо электрической схемы и, соответственно, электронный блок управления 17 получив сигнал с датчика положения ротора 24 включит левое плечо электрической схемы, поменяв, таким образом, полярность питания индуктивной нагрузки электродвигателя. Источники питания правого (30, 31) и левого (18, 19) плеча электрической схемы будучи подключенные к индуктивным нагрузкам электродвигателя через диоды 11, 13 и токоограничивающие конденсаторы 43, 44 (или понижающие трансформаторы, взамен конденсаторов 43, 44) и, соответственно, гальванически развязанные между собой, автоматически подзаряжаются попеременно в процессе вращения ротора, в зависимости от смены полярности той же энергией, которая питает индуктивные нагрузки электродвигателя. При этом диод 13 соединен с токоограничивающим конденсатор 43, который соединен с источником питания левого плеча электрической схемы, а диод 11 соединен с токоограничивающим конденсатором 44, который соединен с источником питания правого плеча электрической схемы.
Рассмотрим функционирование варианта исполнения принципиальной электрической схемы системы электронного управления бесколлекторным электродвигателем, показанной на фигуре 4.
Представленная на фиг. 4 система электронного управления бесколлекторным электродвигателем рассматривается в режиме работы электродвигателя применительно к электроприводу электротранспорту (электромобилю). При этом работа системы аналогична, описанной выше для фигуры 3, отличием является то, что в случае использовании в качестве электропривода электрического транспорта при динамическом движении электронный блок управления 17 дополнительно обрабатывает поступающие сигналы с селектора выбора режима движения 59, с датчика тока 26, с датчика скорости 25, с педали тормоза 27 и педали акселератора 28.
Изобретения не ограничиваются рассмотренными вариантами исполнения и охватывают все допустимые с технической точки зрения комбинации признаков, раскрытых в описании и формуле изобретения.
Таким образом, использование предложенных технических решений позволяет получить универсальную систему управления бесколлекторным электродвигателем, которая позволяет электродвигателю одновременно работать в режиме генератора, что приводит к высокому крутящему моменту и КПД≥98% для электродвигателя различных транспортных средств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| ЭЛЕКТРОПРИВОД ТРАНСПОРТНЫХ СРЕДСТВ С АВТОНОМНЫМИ ИСТОЧНИКАМИ ПИТАНИЯ | 1997 |
|
RU2136104C1 |
| ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2405686C1 |
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ (ВАРИАНТЫ) | 2007 |
|
RU2340994C1 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| Бесколлекторный электродвигатель постоянного тока с регулировкой механических характеристик в широком диапазоне | 2024 |
|
RU2832743C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| ТЯГОВАЯ СИСТЕМА ЭЛЕКТРОМОБИЛЯ | 2018 |
|
RU2696752C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ ФИЛЬТР ИМПУЛЬСНЫХ КОММУТАЦИОННЫХ ПЕРЕНАПРЯЖЕНИЙ | 2008 |
|
RU2375802C1 |
| ПОЛНОПРИВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2290328C1 |
Изобретения относятся к области электротехники, в частности к системам электронного управления электродвигателем, и могут быть использованы для управления электродвигателем постоянного тока. Техническим результатом является разработка системы электронного управления бесколлекторным электродвигателем, обладающей высокой гибкостью и эффективностью управления и обеспечивающей эффективное использование и возврат электроэнергии как во время работы электродвигателя при его «холостом» ходе, так и при его торможении, повышение КПД и его крутящего момента. Системы электронного управления бесколлекторным электродвигателем представляют собой ротор с постоянными магнитами и статор с электромагнитами и содержат электронный блок управления, силовые полупроводниковые ключи, датчики положения ротора. В первом и втором вариантах исполнения систем электронного управления бесколлекторным электродвигателем в качестве источника питания используются параллельно соединенные аккумуляторная батарея и буферный накопитель суперконденсаторной батареи. Второй вариант исполнения отличается тем, что используют два гальванически развязанных источника питания правого и левого плечей электрической схемы. В первом варианте источник питания подключен к индуктивной нагрузке через параллельно соединенные Н-мост силовых полупроводниковых ключей с блокирующими диодами и диодный мост, а во втором - через токоограничивающие конденсаторы и диоды. В обоих вариантах электронный блок управления связан с датчиком тока, с датчиками положения ротора, ориентированными по осевым линиям постоянных магнитов, и через инверторный блок реверса - с датчиками положения ротора, ориентированными между осевых линий постоянных магнитов, и с устройством изменения ориентации датчиков положения ротора. 2 н. и 6 з.п. ф-лы, 4 ил.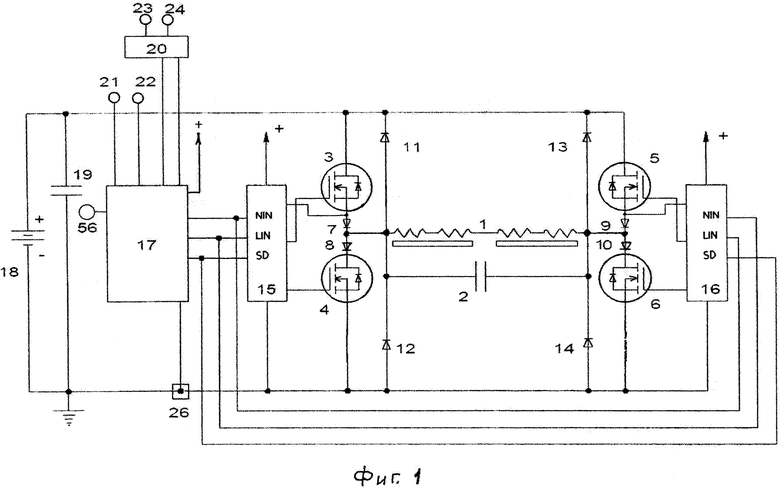
1. Система электронного управления бесколлекторным электродвигателем, представляющим собой ротор с постоянными магнитами с чередующимся направлением магнитного поля и статор с индуктивной нагрузкой, выполненной в виде электромагнитов по две катушки с последовательно встречным направлением обмотки, включающая электронный блок управления, силовые полупроводниковые ключи, датчики положения ротора, отличающаяся тем, что содержит конденсатор, образующий с обмотками электромагнитов резонансный контур, источник питания, выполненный в виде параллельно соединенных аккумуляторной батареи и буферного накопителя суперконденсаторной батареи, при этом источник питания выводами плюс и минус через соединенный Н-мост силовых полупроводниковых ключей с блокирующими диодами и диодный мост подключен к индуктивной нагрузке, а верхние и нижние силовые полупроводниковые ключи Н-моста соединены с драйверами верхних и нижних уровней, связанными с электронным блоком управления, который соединен с датчиком тока, с датчиками положения ротора, ориентированными по осевым линиям постоянных магнитов, и через инверторный блок реверса - с датчиками положения ротора, ориентированными между осевыми линями постоянных магнитов, и с устройством изменения ориентации датчиков положения ротора.
2. Система электронного управления бесколлекторным электродвигателем по п.1, отличающаяся тем, что электронный блок управления соединен с датчиком скорости, с педалью тормоза, с педалью акселератора, с шунтирующим силовым ключом.
3. Система электронного управления бесколлекторным электродвигателем, представляющим собой ротор с постоянными магнитами с чередующимся направлением магнитного поля и статор с индуктивной нагрузкой, выполненной в виде электромагнитов по две катушки с последовательно встречным направлением обмотки, включающая электронный блок управления, силовые полупроводниковые ключи, датчики положения ротора, отличающаяся тем, что содержит конденсатор, образующий с обмотками электромагнитов резонансный контур, два гальванически развязанных источника питания правого и левого плечей электрической схемы, выполненные в виде параллельно соединенных аккумуляторных батарей и буферных накопителей суперконденсаторных батарей, при этом источники питания выводами плюс и минус подключены через токоограничивающие конденсаторы и диоды с индуктивной нагрузкой, а выходы источников питания подключены к мультивибраторам, соединенным с входами повышающих трансформаторов, выходы которых присоединены к диодным мостам, соединенным с высоковольтными конденсаторами, которые связаны с высоковольтными сторонами конверсионных трубок, низковольтные стороны которых соединены с триодами, которые через управляемые генераторы коротких импульсов связаны с электронным блоком управления, а выходы конверсионных трубок соединены с разрядниками для ограничения перенапряжений и с входами понижающих трансформаторов, выходы которых соединены с силовыми полупроводниковыми ключами, которые через драйверы связаны с электронным блоком управления, который соединен с датчиком тока, с датчиками положения ротора, ориентированными по осевым линиям постоянных магнитов, и через инверторный блок реверса - с датчиками положения ротора, ориентированными между осевыми линиями постоянных магнитов, с устройством изменения ориентации датчиков положения ротора, при этом индуктивная нагрузка соединена через блокирующие диоды с силовыми полупроводниковыми ключами.
4. Система электронного управления бесколлекторным электродвигателем по п.3, отличающаяся тем, что электронный блок управления соединен с датчиком скорости, с педалью тормоза, с педалью акселератора, с шунтирующим силовым ключом.
5. Система электронного управления бесколлекторным электродвигателем по пп.1, 3, отличающаяся тем, что в качестве силовых полупроводниковых ключей использованы полевые транзисторы с изолированным затвором.
6. Система электронного управления бесколлекторным электродвигателем по пп.1, 3, отличающаяся тем, что в качестве датчиков положения ротора использованы датчики Холла.
7. Система электронного управления электродвигателем по пп.1, 3, отличающаяся тем, в электродвигателе ротор расположен с внешней стороны статора.
8. Система электронного управления электродвигателем по пп.1, 3, отличающаяся тем, что в электродвигателе ротор расположен внутри статора.
| ИНДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ (ВАРИАНТЫ) | 2007 |
|
RU2340994C1 |
| ПОЛНОПРИВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2290328C1 |
| Способ обогрева прибыльной части слитка | 1959 |
|
SU126996A1 |
| Коронка с двухдолотчатым съемным и разъемным опережающим лезвием | 1959 |
|
SU121405A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДИСКА С ОТВЕРСТИЯМИ | 1996 |
|
RU2149226C1 |
| DE 60313458 T2, 03.01.2008 | |||
| JP 2007500499 A, 23.10.2003 | |||
| US 6791226 B1, 14.09.2004 | |||
| WO 2004091957 A1, 28.10.2004. | |||

