ПЕРЕКРЕСТНЫЕ ССЫЛКИ НА СМЕЖНЫЕ ЗАЯВКИ
Настоящая заявка является частичным продолжением заявки на патент США № 13/424648 в соответствии с § 120 раздела 35 Свода законов США, поданной 20 марта 2012 г., которая является выделенной заявкой на патент США № 12/949099 в соответствии с § 121 раздела 35 Свода законов США, поданной 18 ноября 2010 г., в настоящее время патент США № 8167185, который является продолжением заявки на патент США № 11/343803 в соответствии с § 120 раздела 35 Свода законов США, поданной 31 января 2006 г., в настоящее время патент США № 7845537, содержание каждой из которых полностью включено в настоящий документ путем ссылки. Настоящая заявка также является частичным продолжением заявки на патент США № 12/846228 в соответствии с § 120 раздела 35 Свода законов США, поданной 29 июля 2010 г., которая является частичным продолжением заявки на патент США № 12/693460 в соответствии с § 120 раздела 35 Свода законов США, поданной 26 января 2010 г., которая истребует приоритет, заявленный в предварительной заявке на патент США № 61/150382 в соответствии с § 119(e) раздела 35 Свода законов США, поданной 6 февраля 2009 г., содержание каждой из которых полностью включено в настоящий документ путем ссылки.
Настоящая заявка связана со следующими одновременно поданными заявками на патент США, описание каждой из которых включено в настоящий документ путем ссылки:
заявка на патент США № 11/343498, в настоящее время патент США № 7766210 под названием «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ С ПОЛЬЗОВАТЕЛЕМ», авторы изобретения: Frederick E. Shelton, IV, John Ouwerkerk и Jerome R. Morgan;
заявка на патент США № 11/343573, в настоящее время патент США № 7416101, под названием «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И ОБРАТНОЙ СВЯЗЬЮ ПО УСИЛИЮ НАГРУЗКИ», авторы изобретения: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan и Jeffrey S. Swayze;
заявка на патент США № 11/344035, в настоящее время патент США № 7422139 под названием «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И ТАКТИЛЬНОЙ ОБРАТНОЙ СВЯЗЬЮ ПО ПОЛОЖЕНИЮ», авторы изобретения: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan и Jeffrey S. Swayze;
заявка на патент США № 11/343447, в настоящее время патент США № 7770775 под названием «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И АДАПТИВНОЙ ОБРАТНОЙ СВЯЗЬЮ С ПОЛЬЗОВАТЕЛЕМ», авторы изобретения: Frederick E. Shelton, IV, John N. Ouwerkerk и Jerome R. Morgan;
заявка на патент США № 11/343562, в настоящее время патент США № 7568603 под названием «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И ШАРНИРНО-СОЧЛЕНЕННЫМ КОНЦЕВЫМ ЭФФЕКТОРОМ», авторы изобретения: Frederick E. Shelton, IV и Christoph L. Gillum;
заявка на патент США № 11/344024, в настоящее время патент США № 8186555 под названием «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С ЭЛЕКТРОПРИВОДОМ И МЕХАНИЧЕСКОЙ ЗАКРЫВАЮЩЕЙ СИСТЕМОЙ», авторы изобретения: Frederick E. Shelton, IV и Christoph L. Gillum;
заявка на патент США № 11/343321, в настоящее время публикация патента США № 2007/0175955 под названием «ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ С МЕХАНИЗМОМ БЛОКИРОВКИ ЗАКРЫВАЮЩЕГО СПУСКОВОГО МЕХАНИЗМА», авторы изобретения: Frederick E. Shelton, IV и Kevin R. Doll;
заявка на патент США № 11/343563, в настоящее время публикация патента США № 2007/0175951 под названием «ПЕРЕКЛЮЧАТЕЛЬ ПЕРЕДАЧ ДЛЯ МЕХАНИЗИРОВАННОГО ХИРУРГИЧЕСКОГО РЕЖУЩЕ-СШИВАЮЩЕГО ИНСТРУМЕНТА», авторы изобретения: Frederick E. Shelton, IV, Jeffrey S. Swayze, Eugene L. Timperman;
заявка на патент США № 11/344020, в настоящее время патент США № 7464846 под названием «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ СЪЕМНУЮ АККУМУЛЯТОРНУЮ БАТАРЕЮ», авторы изобретения: Frederick E. Shelton, IV, Kevin R. Doll, Jeffrey S. Swayze и Eugene Timperman;
заявка на патент США № 11/343439, в настоящее время патент США № 7644848 под названием «ЭЛЕКТРОННЫЕ БЛОКИРОВКИ И СОДЕРЖАЩИЙ ИХ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ», авторы изобретения: Jeffrey S. Swayze, Frederick E. Shelton, IV, Kevin R. Doll;
заявка на патент США № 11/343547, в настоящее время патент США № 7753904 под названием «ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С РУКОЯТКОЙ, КОТОРАЯ СПОСОБНА ШАРНИРНО ПОВОРАЧИВАТЬСЯ ОТНОСИТЕЛЬНО СТЕРЖНЯ», авторы изобретения: Frederick E. Shelton, IV, Jeffrey S. Swayze, Mark S. Ortiz и Leslie M. Fugikawa;
заявка на патент США № 11/344021, в настоящее время патент США № 7464849 под названием «ЭЛЕКТРОМЕХАНИЧЕСКИЙ ХИРУРГИЧЕСКИЙ РЕЖУЩЕ-СШИВАЮЩИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ ПОВОРОТНУЮ ПУСКОВУЮ И ЗАКРЫВАЮЩУЮ СИСТЕМУ С ПАРАЛЛЕЛЬНЫМИ ЗАКРЫВАЮЩИМИ КОМПОНЕНТАМИ И КОМПОНЕНТАМИ ВЫРАВНИВАНИЯ УПОРА», авторы изобретения: Frederick E. Shelton, IV, Stephen J. Balek и Eugene L. Timperman;
заявка на патент США № 11/343546, в настоящее время публикация патента США № 2007/0175950 под названием «ОДНОРАЗОВАЯ КАССЕТА СО СКОБАМИ, ИМЕЮЩАЯ УПОР С ЛОКАЛИЗАТОРОМ ТКАНИ ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ РЕЖУЩЕ-СШИВАЮЩИМ ИНСТРУМЕНТОМ, И МОДУЛЬНАЯ СИСТЕМА КОНЦЕВОГО ЭФФЕКТОРА ДЛЯ НЕЕ», авторы изобретения: Frederick E. Shelton, IV, Michael S. Cropper, Joshua M. Broehl, Ryan S. Crisp, Jamison J. Float, Eugene L. Timperman; и
заявка на патент США № 11/343545, в настоящее время публикация патента США № 2007/0175949 под названием «ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, ИМЕЮЩИЙ СИСТЕМУ ОБРАТНОЙ СВЯЗИ», авторы изобретения: Frederick E. Shelton, IV, Jerome R. Morgan, Kevin R. Doll, Jeffrey S. Swayze и Eugene Timperman.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к хирургическим инструментам и более конкретно относится к хирургическим инструментам для малоинвазивных вмешательств, которые способны фиксировать различные состояния инструмента.
Описываемое изобретение по существу и в различных вариантах осуществления относится к хирургическим сшивающим и режущим инструментам, имеющим конструкцию и выполненным с возможностью наложения рядов скоб из кассеты со скобами многоразового использования на ткань при рассечении ткани между накладываемыми рядами скоб. Более конкретно описываемое изобретение относится к электронным блокировкам для применения в хирургических сшивающих и режущих инструментах с электроприводом, которые предотвращают рассечение ткани, когда кассета со скобами не вставлена, вставлена неверно или израсходована или когда хирургический сшивающий и режущий инструмент по иным причинам не находится в состоянии, обеспечивающем выполнение операции сшивания и рассечения безопасным и/или оптимальным способом. Описываемое изобретение дополнительно относится к электронным блокировкам для запрета применения некоторых возможностей инструмента во время выполнения операции сшивания и рассечения.
Эндоскопическим хирургическим инструментам часто отдают предпочтение перед традиционными устройствами для открытого хирургического доступа, поскольку меньший разрез обычно приводит к уменьшению времени послеоперационного восстановления и снижению риска осложнений. Поэтому была проведена значительная работа по разработке набора эндоскопических хирургических инструментов, которые допускают точное введение дистального концевого эффектора в желаемое операционное поле через канюлю или троакар. Такие дистальные концевые эффекторы зацепляют ткань множеством способов для достижения диагностического или терапевтического эффекта (такие инструменты, как, например, эндокатер, зажим, рассекатель, сшивающие инструменты, клипсонакладыватель, устройство доступа, устройство для введения препаратов медикаментозной/генной терапии и устройство подачи энергии для проведения ультразвуковых, РЧ- или лазерных процедур и т. д.).
Известные хирургические сшивающие инструменты включают в себя концевой эффектор, который одновременно выполняет продольное рассечение ткани и накладывает ряды скоб на противоположные края разреза. Концевой эффектор содержит пару взаимодействующих браншей, которые, если инструмент предназначен для эндоскопических или лапароскопических вмешательств, можно провести через проходное отверстие канюли. В одну из браншей устанавливается кассета со скобами, имеющая по меньшей мере два расположенных по бокам ряда скоб. Другая бранша представляет собой упор с углублениями для формирования скоб, расположенными соответственно рядам скоб в кассете. Инструмент включает в себя множество клиньев с возвратно-поступательным движением, которые при дистальном перемещении проходят через отверстия в кассете со скобами и входят в зацепление с направляющими для скоб для выдвижения скоб к упору.
Пример хирургического сшивающего инструмента, который можно использовать в эндоскопических приложениях, описан в патенте США 5465895 под названием «ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ», авторы Knodel et al., который содержит описание эндокатера с раздельными закрывающим и сшивающим/режущим действиями. При использовании данного устройства перед сшиванием хирург может закрыть бранши на ткани для размещения ткани в требуемое положение. После того как хирург убедится в том, что бранши правильно захватили ткань, он может запустить хирургический сшивающий инструмент с одним рабочим тактом или несколькими рабочими тактами, в зависимости от модификации устройства. Запуск хирургического сшивающего инструмента приводит к рассечению и сшиванию ткани. Одновременное рассечение и сшивание тканей исключает осложнения, которые могут возникать при поочередном выполнении этих операций разными хирургическими инструментами, например, только режущими или только сшивающими инструментами.
Особое преимущество возможности фиксирования ткани перед запуском инструмента состоит в том, что хирург имеет возможность убедиться (с помощью эндоскопа) в достижении места, в котором предполагается выполнить рассечение, а также в том, что бранши удерживают достаточное количество ткани. В противном случае противоположные бранши можно свести слишком близко, особенно закусывая на своих дистальных концах, и тем самым неэффективно формировать закрытые скобы в рассеченной ткани. С другой стороны, избыточное количество зажатой ткани может приводить к заклиниванию, и процесс сшивания не будет завершен.
Если эндоскопические хирургические инструменты выходят из строя, их часто возвращают производителю или в другую организацию для проведения анализа неисправности. Если неисправность привела к дефекту в инструменте критического класса, производителю необходимо определить причину неисправности и определить, требуется ли изменение конструкции. В этом случае производитель может потратить сотни человекочасов, анализируя вышедший из строя инструмент и пытаясь воссоздать условия, при которых он вышел из строя, основываясь только на повреждении инструмента. Такой способ анализа неисправности инструмента может быть дорогим и очень сложным. Кроме того, многие из этих анализов говорят лишь о том, что неисправность возникла из-за ненадлежащего использования инструмента.
Поскольку требуемое для активации усилие (т. е. «усилие пуска», или FTF), необходимое для закрывания браншей и одновременного выполнения операции рассечения и сшивания, может быть значительным, то режуще-сшивающим инструментом с ручным приводом, таким как описанный выше инструмент, не смогут воспользоваться в остальном квалифицированные пользователи, не способные развить требуемое усилие FTF. Соответственно разработаны механизированные режуще-сшивающие инструменты для уменьшения усилия пуска (FTF). Такие инструменты обычно содержат электродвигатели или другие приводные механизмы, способные поддержать или заменить развиваемое пользователем усилие при выполнении операции рассечения и сшивания.
Хотя механизированные инструменты обеспечивают многочисленные преимущества, все же желательно предотвращать ненамеренную активацию инструмента в некоторых условиях. Например, активация инструмента без установленной кассеты со скобами или активация инструмента с установленной, но израсходованной кассетой для скоб может привести к рассечению ткани без одновременного сшивания, необходимого для минимизации кровотечения. Кроме того, активация инструмента без правильного закрытия браншей может привести к неприемлемому выполнению операции рассечения и сшивания скобами и/или вызвать механическое повреждение инструмента. Аналогичные последствия могут возникать при непреднамеренном раскрытии браншей в процессе выполнения операции рассечения и сшивания. Особенно желательно, чтобы элементы блокировки для предотвращения подобного рода непреднамеренной активации и манипулирования браншами были выполнены надежным способом, защищенным от возможного нарушения функционирования. Кроме того, для облегчения изготовления и сборки дополнительно желательно, чтобы элементы блокировки были выполнены с минимальным количеством компонентов.
Следовательно, существует значительная потребность в элементах блокировки для применения в механизированных режуще-сшивающих инструментах, которые предотвращают непреднамеренную активацию (т. е. рассечение и сшивание) и манипулирование браншами в таких условиях, как описано выше.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В одном общем аспекте настоящее изобретение относится к хирургическому инструменту. Хирургический инструмент имеет концевой эффектор и спусковой механизм, связанный с концевым эффектором. Хирургический инструмент содержит также первый датчик и запоминающее устройство с внешним доступом, связанное с первым датчиком. Первый датчик вырабатывает выходной сигнал, который представляет первое состояние либо спускового механизма, либо концевого эффектора. Запоминающее устройство выполнено с возможностью регистрации выходного сигнала первого датчика. В различных вариантах осуществления запоминающее устройство может включать в себя выходной порт и/или сменный носитель данных.
Кроме того, в различных вариантах осуществления выходной сигнал первого датчика представляет состояние концевого эффектора, и инструмент дополнительно содержит второй датчик с выходным сигналом, представляющим состояние спускового механизма. Запоминающее устройство выполнено с возможностью регистрации выходного сигнала первого датчика и второго датчика.
В другом общем аспекте настоящее изобретение относится к способу регистрации состояния хирургического инструмента. Способ содержит стадию контроля за выходными сигналами множества датчиков. Выходные сигналы представляют состояния хирургического инструмента. Способ содержит также стадию регистрации выходных сигналов в запоминающем устройстве при изменении по меньшей мере одного из состояний хирургического инструмента. В различных вариантах осуществления способ может также содержать стадию передачи записанных выходных сигналов от множества датчиков на внешнее устройство.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В настоящем документе приводится описание различных вариантов осуществления настоящего изобретения на примерах, сопровождаемых следующими чертежами, где:
на фиг. 1 и 2 представлены виды в перспективе хирургического режуще-сшивающего инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 3-5 представлены виды с пространственным разделением компонентов концевого эффектора и стержня инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 6 представлен вид сбоку концевого эффектора в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 7 представлен вид с пространственным разделением компонентов рукоятки инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 8 и 9 представлены частичные виды в перспективе рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 10 представлен вид сбоку рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 10A и 10B показан пропорциональный датчик, который можно использовать в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 11 представлена принципиальная схема цепи, которую можно использовать в инструменте в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 11A представлена принципиальная схема другой цепи, которую можно использовать в инструменте в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 12 и 13 представлены виды сбоку рукоятки в соответствии с другими вариантами осуществления настоящего изобретения;
на фиг. 14-22 показаны различные механизмы для фиксации закрывающего спускового механизма в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 23A-B показан универсальный шарнир (u-образный шарнир), который можно использовать в точке шарнирного сочленения инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 24A-B показан кабель кручения, который можно использовать в точке шарнирного сочленения инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 25-31 показан хирургический режуще-сшивающий инструмент с усилителем в соответствии с другим вариантом осуществления настоящего изобретения;
на фиг. 32-36 показан хирургический режуще-сшивающий инструмент с усилителем в соответствии с еще одним вариантом осуществления настоящего изобретения;
на фиг. 37-40 показан хирургический режуще-сшивающий инструмент с тактильной обратной связью в соответствии с вариантами осуществления настоящего изобретения;
на фиг. 41 представлен вид с пространственным разделением компонентов концевого эффектора и стержня инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 42 представлен вид сбоку рукоятки механически активируемого инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 43 представлен вид с пространственным разделением компонентов рукоятки механически активируемого инструмента, изображенного на фиг. 42;
на фиг. 44 представлена принципиальная схема системы записи для регистрации различных условий инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 45 и 46 представлены виды сбоку в вырезе рукоятки инструмента с различными датчиками в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 47 представлен концевой эффектор инструмента с различными датчиками в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 48 представлен пусковой стержень инструмента, включающего в себя датчик в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 49 представлен вид сбоку рукоятки, концевого эффектора и пускового стержня инструмента с датчиком в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 50A представлен вид с пространственным разделением компонентов канала для скоб и частей кассеты со скобами инструмента с различными датчиками в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 50B представлен вид сверху канала для скоб инструмента с различными датчиками в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 51A-C представлены схемы установки и конфигурации переключателей датчиков блокировки в цепи блокировки в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 52A и 52B представлена блок-схема, показывающая способ управления инструментом в соответствии с различными вариантами осуществления; и
на фиг. 53 представлена карта запоминания, показывающая пример зафиксированных состояний инструмента в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 54 и 55 представлен другой вариант осуществления настоящего изобретения, включающий в себя вариант осуществления инструмента, в котором спусковой механизм втягивания находится на пусковом крючке и перемещается вместе с ним;
на фиг. 56 показан другой вариант осуществления цепи управления током в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 57, 57A, 57B и 57C представлены схемы других цепей управления током в соответствии с различными вариантами осуществления настоящего изобретения;
на фиг. 58 и 59 показан один вариант осуществления способа блокировки закрывающего спускового механизма на части пистолетной рукоятки инструмента;
на фиг. 60 представлена схема электрической цепи инструмента в соответствии с различными вариантами осуществления настоящего изобретения, показывающая использование переключателя предохранителя закрытия;
на фиг. 61 показан вариант осуществления хирургического инструмента, иллюстрирующий пример расположения пускового переключателя;
на фиг. 62-65 показаны варианты расположения концевого эффектора в соответствии с различными вариантами осуществления;
на фиг. 66 и 67 представлен в общем виде дистальный конец хирургического сшивающего инструмента в соответствии с различными вариантами осуществления настоящего изобретения, который включает в себя упор, корпус кассеты и канал;
на фиг. 68 представлен дистальный конец хирургического сшивающего инструмента, показанного на фиг. 66-67, с размещенным на нем индикатором;
на фиг. 69 представлен хирургический сшивающий инструмент, показанный на фиг. 66-67, с размещенным на его рукоятке индикатором.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Обладателю данной заявки также принадлежат следующие заявки на патент США, поданные в тот же день и полностью включенные в настоящий документ путем ссылки:
заявка на патент США под названием «Хирургическое сшивающее устройство с электроприводом и механизмом реверса режущего элемента», заявка на патент США № 12/846249, поданная 29 июля 2010 г., публикация заявки на патент США № US-2011-006103 A1; и
заявка на патент США под названием «Хирургическое сшивающее устройство с электроприводом и механизмами регулировки зазора для ткани внутри концевого эффектора», заявка на патент США № 12/846237, поданная 29 июля 2010 г., публикация заявки на патент США № US-2011-0011915-A1.
На фиг. 1 и 2 представлены изображения хирургического режуще-сшивающего инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Представленный на фигуре вариант осуществления представляет собой эндоскопический хирургический инструмент 10, и в целом варианты осуществления инструмента 10, описанные в настоящем документе, представляют собой эндоскопические хирургические режуще-сшивающие инструменты. Необходимо отметить, что в соответствии с другими вариантами осуществления настоящего изобретения инструмент 10 может также являться неэндоскопическим режущим хирургическим инструментом, таким как инструмент для лапароскопии.
Хирургический инструмент 10, изображенный на фиг. 1 и 2, содержит рукоятку 6, стержень 8 и шарнирный концевой эффектор 12, соединенный со стержнем 8 шарнирным сочленением 14. Смежно с браншей 6 может располагаться устройство управления шарнирным сочленением 16, обеспечивающее вращение концевого эффектора 12 на шарнирном сочленении 14. Следует понимать, что различные варианты осуществления могут включать в себя неповоротный концевой эффектор и, следовательно, могут не иметь шарнирного сочленения 14 или устройства управления шарнирным сочленением 16. Также в представленном варианте осуществления концевой эффектор 12 выполнен в виде эндокатера для фиксации, рассечения и сшивания ткани, однако в других вариантах осуществления могут использоваться иные типы концевых эффекторов, предназначенные для других типов хирургических устройств, такие как зажимы, рассекатели, сшивающие инструменты, клипсонакладыватели, устройства доступа, устройства для введения препаратов медикаментозной/генной терапии, проведения ультразвуковых, РЧ- или лазерных процедур и т. д.
Бранша 6 инструмента 10 может включать в себя закрывающий спусковой механизм 18 и пусковой крючок 20 для активации концевого эффектора 12. Следует понимать, что инструменты, имеющие концевые эффекторы и предназначенные для выполнения различных хирургических манипуляций, могут иметь различное количество или типы спусковых механизмов или иных соответствующих средств управления концевым эффектором 12. Как показано на фигуре, концевой эффектор 12 отделен от бранши 6 предпочтительно удлиненным стержнем 8. В одном варианте осуществления хирург или оператор инструмента 10 может шарнирно поворачивать концевой эффектор 12 относительно стержня 8 с помощью устройства управления шарнирным сочленением 16, как более подробно описано в находящейся на рассмотрении заявке на патент США № 11/329020, поданной 10 января 2006 г., под названием «Хирургический инструмент, имеющий шарнирный концевой эффектор», авторы Geoffrey C. Hueil et al., в настоящее время патент США № 7670334, которая полностью включена в настоящий документ путем ссылки.
В приведенном примере концевой эффектор 12, помимо прочего, включает в себя канал для скоб 22 и поворотный зажимной элемент, например упор 24, между которыми поддерживается расстояние, обеспечивающее эффективное сшивание и рассечение ткани, зафиксированной в концевом эффекторе 12. Рукоятка 6 включает в себя рукоятку пистолетного типа 26, к которой хирург подтягивает находящийся на шарнире закрывающий спусковой механизм 18 для фиксации или закрытия упора 24 к каналу для скоб 22 концевого эффектора 12, чтобы тем самым зажать ткань, находящуюся между упором 24 и каналом 22. Пусковой крючок 20 расположен снаружи относительно закрывающего спускового механизма 18. После фиксации закрывающего спускового механизма 18 в положении закрытия, как дополнительно описано ниже, пусковой крючок 20 может немного повернуться к пистолетной рукоятке 26 таким образом, что оператор сможет достать его одной рукой. Затем оператор может притянуть находящийся на шарнире пусковой крючок 20 к пистолетной рукоятке 26 для запуска сшивания и рассечения ткани, зафиксированной в концевом эффекторе 12. В других вариантах осуществления помимо упора 24 можно использовать другие типы зажимных элементов, например, противоположную браншу и т. д.
Следует понимать, что термины «проксимальный» и «дистальный» используются в настоящем документе по отношению к хирургу, удерживающему рукоятку 6 инструмента 10. Так, концевой эффектор 12 расположен дистально по отношению к рукоятке 6, расположенной проксимально. Следует также понимать, что для удобства и ясности такие пространственные термины, как «вертикальный» и «горизонтальный», используются в настоящем документе по отношению к фигурам. Однако использование хирургических инструментов предполагает множество ориентаций и положений, поэтому указанные термины не являются абсолютными и ограничивающими настоящее изобретение.
При пользовании инструментом сначала можно активировать закрывающий спусковой механизм 18. Когда хирурга устраивает положение концевого эффектора 12, он может оттянуть закрывающий спусковой механизм 18 в фиксированное положение полного закрытия, вплотную к пистолетной рукоятке 26. После этого можно активировать пусковой крючок 20. Пусковой крючок 20 возвращается в открытое положение (как показано на фиг. 1 и 2), когда хирург снимает давление, как более подробно описано ниже. Для того чтобы разблокировать закрывающий спусковой механизм 18, необходимо нажать пусковую кнопку на рукоятке 6. Пусковая кнопка может быть выполнена разным образом, например в виде пусковой кнопки 30, представленной на фиг. 42-43, скользящей пусковой кнопки 160, представленной на фиг. 14, и/или кнопки 172, представленной на фиг. 16.
На фиг. 3-6 показаны варианты осуществления вращающегося концевого эффектора 12 и стержня 8 в соответствии с различными вариантами осуществления. На фиг. 3 представлен вид с пространственным разделением компонентов концевого эффектора 12 в соответствии с различными вариантами осуществления. Как показано на фигуре, концевой эффектор 12, помимо ранее указанного канала 22 и упора 24, может включать в себя режущий инструмент 32, салазки 33, кассету со скобами 34, съемно установленную в канале 22, и винтовой стержень 36. Режущий инструмент 32 может, например, представлять собой скальпель. Упор 24 может шарнирно открываться и закрываться на шарнирных штифтах 25, соединенных с проксимальным концом канала 22. Упор 24 может также включать в себя на проксимальном конце язычок 27, вставленный в компонент системы механического закрытия (описана ниже) для открытия и закрытия упора 24. При активации закрывающего спускового механизма 18, то есть когда пользователь инструмента 10 нажимает на него, упор 24 может поворачиваться вокруг шарнирных штифтов 25 в фиксированное, или закрытое, положение. Если фиксация концевого эффектора 12 является удовлетворительной, оператор может активировать пусковой крючок 20, при этом, как более подробно описано ниже, скальпель 32 и салазки 33 перемещаются продольно по каналу 22, рассекая ткань, зажатую концевым эффектором 12. В результате движения салазок 33 вдоль канала 22 скобы (на фигуре не показаны) из кассеты со скобами 34 выталкиваются и проходят сквозь рассеченную ткань вплотную к закрытому упору 24, в результате чего скобы сшивают рассеченную ткань. В некоторых вариантах осуществления салазки 33 могут являться составным компонентом кассеты 34. В патенте США № 6978921 «Хирургический сшивающий инструмент, включающий пусковой механизм с трехрогим элементом», авторы Shelton, IV et al., который полностью включен в настоящий документ путем ссылки, дано более подробное описание таких двухтактных режуще-сшивающих инструментов. Салазки 33 могут являться частью кассеты 34, при этом, когда скальпель 32 втягивается обратно после рассечения ткани, салазки 33 не втягиваются.
Необходимо отметить, что, хотя в описанных в настоящем документе вариантах осуществления инструмента 10 используется концевой эффектор 12, сшивающий рассеченную ткань скобами, в других вариантах осуществления могут использоваться другие способы стягивания или сшивания рассеченной ткани. Например, могут также применяться концевые эффекторы, использующие для сшивания рассеченной ткани энергию радиоволн или адгезивы. В патенте США № 5709680 «Электрохирургическое гемостатическое устройство», авторы Yates et al., и в патенте США № 5688270 «Электрохирургическое гемостатическое устройство с утопленными и/или смещенными электродами», авторы Yates et al., которые включены в настоящий документ путем ссылки, описывается эндоскопический режущий инструмент, использующий для сшивания рассеченной ткани энергию радиоволн. В заявке на патент США № 11/267811, авторы Jerome R. Morgan et al., в настоящее время патент США № 7673783, и в заявке на патент США № 11/267383, авторы Frederick E. Shelton, IV et al., в настоящее время патент США № 7607557, которые также полностью включены в настоящий документ путем ссылки, описываются режущие инструменты, которые используют для стягивания рассеченной ткани адгезивы. В соответствии с изложенным выше, хотя приведенное в настоящем документе описание относится к манипуляциям по рассечению/сшиванию и аналогичным операциям, описанным ниже, необходимо понимать, что данный вариант осуществления является примером и не ограничивает настоящее изобретение. Могут также использоваться другие способы сшивания тканей.
На фиг. 4 и 5 представлены виды с пространственным разделением компонентов, и на фиг. 6 представлен вид сбоку концевого эффектора 12 и стержня 8 в соответствии с различными вариантами осуществления. Как показано в представленном варианте осуществления, стержень 8 может включать в себя проксимальную закрывающую трубку 40 и дистальную закрывающую трубку 42, связанные шарнирным звеном 44. Дистальная закрывающая трубка 42 имеет отверстие 45, в которое вставляют язычок 27 на упоре 24 для открытия и закрытия упора 24, как более подробно описано ниже. Внутри закрывающих трубок 40 и 42 может находиться проксимальная сердцевинная трубка 46. Внутри проксимальной сердцевинной трубки 46 может находиться основной вращательный (или проксимальный) приводной стержень 48, который сообщается с вторичным (или дистальным) приводным стержнем 50 с помощью узла конических зубчатых колес 52. Вторичный приводной стержень 50 соединен с ведущим зубчатым колесом 54, которое зацепляет проксимальное ведущее зубчатое колесо 56 винтового стержня 36. Вертикальное коническое зубчатое колесо 52b может находиться и поворачиваться в отверстии 57 на дистальном конце проксимальной сердцевинной трубки 46. Вторичный приводной стержень 50 и ведущие зубчатые колеса 54 и 56 могут быть заключены в дистальную сердцевинную трубку 58. В совокупности основной приводной стержень 48, вторичный приводной стержень 50 и узел шарнирного сочленения (например узел конических зубчатых колес 52a-c) в настоящем документе в некоторых случаях упоминаются как «узел основного приводного стержня».
Втулка 38, расположенная на дистальном конце канала для скоб 22, принимает винтовой стержень 36, что позволяет винтовому стержню 36 свободно вращаться относительно канала 22. Винтовой стержень 36 может стыковаться с резьбовым отверстием (не показано) скальпеля 32 таким образом, что при вращении стержня 36 скальпель 32 перемещается дистально или проксимально (в зависимости от направления вращения) в канале для скоб 22. Соответственно когда основной приводной стержень 48 вращается при активации пускового крючка 20 (как более подробно описано ниже), узел конических зубчатых колес 52a-c вызывает вращение вторичного приводного стержня 50, который, в свою очередь, вследствие зацепления ведущих зубчатых колес 54 и 56 вызывает вращение винтового стержня 36, что вынуждает элемент продвижения скальпеля 32 перемещаться продольно вдоль канала 22 и рассекать ткань, зафиксированную концевым эффектором 12. Салазки 33 могут быть выполнены, например, из пластика и могут иметь наклонную дистальную поверхность. Когда салазки 33 пересекают канал 22, наклоненная вперед поверхность может поднять вверх или вытолкнуть скобы из кассеты со скобами через зажатую ткань вплотную к упору 24. Упор 24 загибает скобы, скрепляя таким образом рассеченную ткань. После втягивания скальпеля 32 скальпель 32 и салазки 33 могут быть разъединены, при этом салазки 33 остаются на дистальном конце канала 22.
Как описано выше, из-за отсутствия обратной связи с пользователем при проведении операции рассечения/сшивания, многие врачи не признают эндокатеры с электроприводом, с помощью которых рассечение/сшивание производится всего лишь нажатием кнопки. В отличие от этого варианты осуществления настоящего изобретения представляют эндокатер с электроприводом, обеспечивающий пользователю обратную связь о размещении, усилии и/или положении режущего инструмента 32 в концевом эффекторе 12.
На фиг. 7-10 представлен пример осуществления эндокатера с электроприводом и в частности его рукоятки, который предоставляет пользователю обратную связь о размещении и силе нагрузки на режущий инструмент 32 в концевом эффекторе 12. Кроме того, данный вариант осуществления может использовать силу, приложенную пользователем во время нажатия пускового крючка 20, для увеличения производительности устройства (так называемый режим «усилителя»). Данный вариант осуществления может использоваться с вращающимся концевым эффектором 12 и стержнем 8 в описанных выше вариантах осуществления. Как показано в представленном варианте осуществления, рукоятка 6 включает в себя детали внешней нижней стороны 59, 60 и детали внешней верхней стороны 61, 62, которые вплотную прилегают друг к другу, формируя внешнюю часть рукоятки 6. В части пистолетной рукоятки 26 рукоятки 6 может быть размещена аккумуляторная батарея 64, например, литий-ионная аккумуляторная батарея. Аккумуляторная батарея 64 питает электродвигатель 65, расположенный в верхней части пистолетной рукоятки 26 рукоятки 6. Согласно различным вариантам осуществления, электродвигатель 65 может представлять собой щеточный двигатель постоянного тока с максимальной скоростью вращения приблизительно 5000 оборотов в минуту. Электродвигатель 65 может приводить в движение узел конических зубчатых колес 66 под углом 90°, содержащий первое коническое зубчатое колесо 68 и второе коническое зубчатое колесо 70. Узел конических зубчатых колес 66 может приводить в действие узел планетарной передачи 72. Узел планетарной передачи 72 может включать в себя ведущую шестерню 74, соединенную с приводным стержнем 76. Ведущая шестерня 74 может приводить в действие сопряженное кольцевое зубчатое колесо 78, которое через приводной стержень 82 приводит в действие барабан с винтовой зубчатой передачей 80. Кольцо 84 может быть навинчено на барабан с винтовой зубчатой передачей 80. Таким образом, при вращении электродвигателя 65 кольцо 84 двигается вдоль барабана с винтовой зубчатой передачей 80 с помощью установленного узла конических зубчатых колес 66, узла планетарной передачи 72 и кольцевого зубчатого колеса 78.
Рукоятка 6 может также включать в себя датчик запуска электродвигателя 110 (см. фиг. 10), сообщающийся с пусковым крючком 20 для определения того, что оператор притянул (или закрыл) пусковой крючок 20 к части пистолетной рукоятки 26 рукоятки 6 для активации таким образом операции рассечения/сшивания концевым эффектором 12. Датчик 110 может представлять собой пропорциональный датчик, например, реостат или резистор переменного сопротивления. Когда пусковой крючок 20 находится в прижатом состоянии, датчик 110 определяет перемещение и выдает электрический сигнал, указывающий на необходимость подачи электрического напряжения (или питания) к электродвигателю 65. Если датчик 110 является резистором переменного сопротивления или аналогичным устройством, скорость вращения электродвигателя 65 может быть по существу пропорциональна величине смещения пускового крючка 20. Таким образом, когда оператор слегка прижимает или закрывает пусковой крючок 20, электродвигатель 65 вращается сравнительно медленно. Когда пусковой крючок 20 полностью прижат (или находится в полностью закрытом положении), скорость вращения двигателя 65 достигает максимального значения. Другими словами, чем сильнее пользователь прижимает пусковой крючок 20, тем большее напряжение подается на электродвигатель 65, обеспечивая большую скорость вращения.
Рукоятка 6 может включать в себя срединную часть рукоятки 104, примыкающую к верхней части пускового крючка 20. Рукоятка 6 также может содержать смещающую пружину 112, расположенную между опорами на срединной части рукоятки 104 и пусковом крючке 20. Смещающая пружина 112 может смещать пусковой крючок 20 в полностью открытое положение. Таким образом, когда оператор разблокирует пусковой крючок 20, смещающая пружина 112 переводит пусковой крючок 20 в открытое положение, тем самым предупреждая активацию датчика 110, что приводит к остановке вращения электродвигателя 65. Кроме того, благодаря наличию смещающей пружины 112 каждый раз, когда пользователь закрывает пусковой крючок 20, он чувствует сопротивление закрытию, что обеспечивает пользователю обратную связь, позволяющую контролировать вращения электродвигателя 65. Также оператор может прекратить воздействие на пусковой крючок 20 и тем самым прекратить воздействие на датчик 100 и в результате остановить электродвигатель 65. Таким образом, пользователь может остановить работу концевого эффектора 12, что позволяет обеспечить оператору возможность контролировать операцию по рассечению/сшиванию.
Дистальный конец барабана с винтовой зубчатой передачей 80 включает в себя дистальный приводной стержень 120, который приводит в действие кольцевое зубчатое колесо 122, сопрягающееся с ведущей шестерней 124. Ведущая шестерня 124 соединена с основным приводным стержнем 48 узла основного приводного стержня. Таким образом, вращение электродвигателя 65 вызывает вращение узла основного приводного стержня, что приводит к активации концевого эффектора 12, как описано выше.
Кольцо 84, навинченное на барабан с винтовой зубчатой передачей 80, может включать в себя опору 86, которая установлена в прорезь 88 кулисы 90. В кулисе 90 имеется отверстие 92 на противоположном конце 94, которое принимает шарнирный штифт 96, расположенный между деталями внешних сторон рукоятки 59 и 60. Шарнирный штифт 96 также проходит через отверстие 100 в пусковом крючке 20 и отверстие 102 в срединной части рукоятки 104.
Кроме того, рукоятка 6 может включать в себя датчик обратного действия (или датчик окончания хода) 130 и датчик останова электродвигателя (или начала хода) 142. В различных вариантах осуществления датчик обратного действия 130 может представлять собой концевой переключатель, расположенный на дистальном конце барабана с винтовой зубчатой передачей 80, при этом кольцо 84, навинченное на барабан с винтовой зубчатой передачей 80, контактирует с датчиком обратного действия 130 и включает его, когда кольцо 84 достигает дистального конца барабана с винтовой зубчатой передачей 80. При активации датчик обратного действия 130 направляет сигнал на электродвигатель 65 для изменения направления его вращения и втягивания скальпеля 32 концевого эффектора 12 после операции рассечения.
Датчик останова электродвигателя 142 может представлять собой, например, нормально замкнутый концевой переключатель. В различных вариантах осуществления он может располагаться на проксимальном конце барабана с винтовой зубчатой передачей 80, при этом кольцо 84 активирует переключатель 142, когда кольцо 84 достигает проксимального конца барабана с винтовой зубчатой передачей 80.
Когда во время работы оператор инструмента 10 оттягивает назад пусковой крючок 20, датчик 110 определяет введение в действие пускового крючка 20 и направляет сигнал к электродвигателю 65, активируя его вращение вперед, например, со скоростью, пропорциональной силе, с которой оператор оттягивает пусковой крючок 20. Вращение электродвигателя 65 вперед, в свою очередь, вызывает вращение кольцевого зубчатого колеса 78 на дистальном конце узла планетарной передачи 72, таким образом приводя к вращению барабана с винтовой зубчатой передачей 80 и дистальному продвижению кольца 84, навинченного на барабан с винтовой зубчатой передачей 80, вдоль барабана с винтовой зубчатой передачей 80. Вращение барабана с винтовой зубчатой передачей 80 также приводит в действие узел основного приводного стержня, как описано выше, что, в свою очередь, приводит в рабочее положение скальпель 32 на концевом эффекторе 12, то есть скальпель 32 и салазки 33 проходят продольно вдоль канала 22, при этом рассекая ткань, зафиксированную концевым эффектором 12. Кроме того, в вариантах осуществления, где используется концевой эффектор 12 сшивающего типа, происходит сшивание ткани концевым эффектором 12.
К моменту завершения операции по рассечению/сшиванию ткани концевым эффектором 12 кольцо 84 на барабане с винтовой зубчатой передачей 80 достигает дистального конца барабана с винтовой зубчатой передачей 80, что приводит к включению датчика обратного действия 130, который направляет электродвигателю 65 сигнал об изменении направления вращения. Это, в свою очередь, приводит к втягиванию скальпеля 32 и вынуждает кольцо 84 на барабане с винтовой зубчатой передачей 80 двигаться в обратном направлении к проксимальному кольцу барабана с винтовой зубчатой передачей 80.
Срединная часть рукоятки 104 включает в себя тыльное плечо 106, которое зацепляется за кулису 90, как лучше всего показано на фиг. 8 и 9. Срединная часть рукоятки 104 также имеет ограничитель рабочего хода 107, сцепленный с пусковым крючком 20. Движение кулисы 90 контролируется вращением электродвигателя 65, как описано выше. Когда кулиса 90 вращается против часовой стрелки, в то время как кольцо 84 продвигается от проксимального кольца барабана с винтовой зубчатой передачей 80 к его дистальному кольцу, срединная часть рукоятки 104 может свободно вращаться против часовой стрелки. Таким образом, когда пользователь притягивает пусковой крючок 20, пусковой крючок 20 зацепляет ограничитель рабочего хода 107 срединной части рукоятки 104, в результате чего происходит вращение серединной части рукоятки 104 против часовой стрелки. Однако вследствие сцепления тыльного плеча 106 с кулисой 90 срединная часть рукоятки 104 может вращаться против часовой стрелки настолько, насколько позволяет кулиса 90. Таким образом, если по каким-либо причинам необходимо остановить вращение электродвигателя 65, кулиса 90 остановит вращение, и пользователь не сможет еще больше притянуть пусковой крючок 20, так как срединная часть рукоятки 104 не сможет свободно вращаться против часовой стрелки вследствие удержания ее кулисой 90.
На фиг. 10A и 10B представлены два состояния параметрического датчика, который можно использовать в качестве датчика запуска электродвигателя 110 в соответствии с различными вариантами осуществления настоящего изобретения. Датчик 110 может включать в себя торцевую часть 280, первый электрод (A) 282, второй электрод (B) 284 и сжимаемый диэлектрический материал 286 между электродами 282, 284, такой как, например, электроактивный полимер (ЭАП). Датчик 110 может быть установлен так, чтобы торцевая часть 280 контактировала с пусковым крючком 20, когда последний притянут. Соответственно когда пусковой крючок 20 притянут, диэлектрический материал 286 сжимается, как показано на фиг. 10B, так что электроды 282 и 284 сближаются. Так как расстояние b между электродами 282 и 284 напрямую связано с полным сопротивлением между электродами 282 и 284, чем больше это расстояние, тем больше будет полное сопротивление, и чем меньше расстояние, тем меньше будет полное сопротивление. Таким образом, величина, на которую сжимается диэлектрик 286 в результате прижимания пускового крючка 20, пропорциональна полному сопротивлению между электродами 282 и 284, что можно использовать для пропорционального управления электродвигателем 65.
Компоненты примера системы закрытия (или фиксации) упора 24 концевого эффектора 12 путем притягивания закрывающего спускового механизма 18 также показаны на фиг. 7-10. В показанном варианте осуществления система закрытия включает в себя вилку сцепления 250, соединенную с закрывающим спусковым механизмом 18 шарнирным штифтом 251, вставленным через центрированные отверстия как в закрывающем спусковом механизме 18, так и в вилке сцепления 250. Шарнирный штифт 252, вокруг которого поворачивается закрывающий спусковой механизм 18, вставлен через другое отверстие в закрывающем спусковом механизме 18, который смещен относительно места, в котором штифт 251 вставлен через закрывающий спусковой механизм 18. Таким образом, притягивание закрывающего спускового механизма 18 вызывает вращение против часовой стрелки верхней части закрывающего спускового механизма 18, к которому с помощью штифта 251 прикреплена вилка сцепления 250. Дистальный конец вилки сцепления 250 соединен с помощью штифта 254 с первым закрывающим кронштейном 256. Первый закрывающий кронштейн 256 соединен со вторым закрывающим кронштейном 258. Вместе закрывающие кронштейны 256 и 258 определяют отверстие, в которое вставлен и удерживается проксимальный конец проксимальной закрывающей трубки 40 (см. фиг. 4), при этом продольное перемещение закрывающих кронштейнов 256 и 258 вызывает продольное движение проксимальной закрывающей трубки 40. Инструмент 10 также включает в себя закрывающий шток 260, установленный внутри проксимальной закрывающей трубки 40. Закрывающий шток 260 может включать в себя окно 261, в которое вставляется опора 263 на одной из внешних деталей рукоятки, такой как деталь внешней нижней стороны 59 в приведенном варианте осуществления, жестко связывая закрывающий шток 260 с рукояткой 6. Таким образом, проксимальная закрывающая трубка 40 способна перемещаться продольно по отношению к закрывающему штоку 260. Закрывающий шток 260 может также включать в себя дистальный буртик 267, который прилегает к полости 269 в проксимальной сердцевинной трубке 46 и удерживается заглушкой 271 (см. фиг. 4).
Во время работы, когда вилка сцепления 250 поворачивается вследствие притягивания закрывающего спускового механизма 18, закрывающие кронштейны 256 и 258 заставляют проксимальную закрывающую трубку 40 двигаться дистально (т. е. от рукоятки инструмента 10), что приводит к дистальному перемещению дистальной закрывающей трубки 42 и вращению упора 24 вокруг шарнирных штифтов 25 до фиксированного, или закрытого, положения. Когда закрывающий спусковой механизм 18 разблокирован, проксимальная закрывающая трубка 40 скользит проксимально, что приводит к проксимальному скольжению дистальной закрывающей трубки 42, и вследствие того, что язычок 27 вставлен в окно 45 дистальной закрывающей трубки 42, вызывает поворот упора 24 вокруг шарнирных штифтов 25 в открытое, или разблокированное, положение. Таким образом, притягивая и блокируя закрывающий спусковой механизм 18, оператор может зажимать ткань между упором 24 и каналом 22, а также освобождать ее после рассечения/сшивания, вернув закрывающий спусковой механизм 20 из закрытого положения.
На фиг. 11 представлена принципиальная схема электрической цепи инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Когда оператор начинает тянуть за пусковой крючок 20 после блокировки закрывающего спускового механизма 18, активируется датчик 110, открывая путь току. Если нормально разомкнутый переключатель датчика обратного действия 130 разомкнут (что означает, что не достигнут конец хода концевого эффектора), ток потечет к однополюсному двухпозиционному реле 132. Так как переключатель датчика обратного действия 130 не замкнут, катушка 134 реле 132 не будет находиться под напряжением, то есть реле 132 будет оставаться в невозбужденном состоянии. В цепи также установлен датчик блокировки кассеты 136. Если в концевой эффектор 12 вставлена кассета со скобами 34, датчик 136 будет находиться в замкнутом состоянии, пропуская ток. И наоборот, если в концевой эффектор 12 не вставлена кассета со скобами 34, датчик 136 будет разомкнут, тем самым препятствуя питанию электродвигателя 65 от аккумуляторной батареи 64.
При наличии кассеты со скобами 34 датчик 136 замыкается, что подает напряжение на однополюсное однопозиционное реле 138. Когда реле 138 находится в возбужденном состоянии, ток протекает через реле 136 и датчик резистора переменного сопротивления 110 к электродвигателю 65 через двухполюсное двухпозиционное реле 140, таким образом питая электродвигатель 65 и позволяя ему вращаться вперед.
Когда концевой эффектор 12 достигает конца хода, активируется датчик обратного действия 130, замыкая переключатель 130 и пропуская ток к реле 134. Это приводит к тому, что реле 134 переходит в возбужденное состояние (не показано на фиг. 13), при этом ток течет не через датчик блокировки кассеты 136 и резистор переменного сопротивления 110, а проходит как к нормально замкнутому двухполюсному двухпозиционному реле 140, так и к электродвигателю 65, но через реле 140, что заставляет электродвигатель 65 изменить направление вращения.
Поскольку переключатель датчика останова электродвигателя 142 является нормально замкнутым, ток пойдет обратно к реле 134, обеспечивая его замыкание до тех пор, пока не будет разомкнут переключатель 142. Когда скальпель 32 находится в полностью втянутом положении, переключатель датчика останова электродвигателя 142 активируется и размыкается, прекращая, тем самым, подачу питания на электродвигатель 65.
В других вариантах осуществления вместо пропорционального датчика 110 можно использовать двухпозиционный датчик. В таких вариантах осуществления скорость вращения электродвигателя 65 может быть не пропорциональной силе, приложенной оператором. Как правило, электродвигатель 65 будет вращаться по существу с постоянной скоростью. Тем не менее, оператор получает обратную связь относительно усилия, так как пусковой крючок 20 включен в цепь зубчатых передач привода.
На фиг. 11A представлена принципиальная схема другой электрической цепи инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения. Данная электрическая цепь включает в себя переключатели датчиков блокировки 136a-d, вместе образующие цепь блокировки 137, через которую должен протекать ток от реле 132, когда на последнем отсутствует напряжение, для включения питания и запуска в работу электродвигателя 65. Каждый переключатель датчика блокировки 136a-d выполнен с возможностью сохранения разомкнутого (т. е. непроводящего) состояния переключателя или замкнутого (т. е. проводящего) состояния переключателя в ответ на наличие или отсутствие соответствующего условия. Любое из соответствующих условий, при его наличии во время активации инструмента 10, может стать причиной неудовлетворительного выполнения операции рассечения и сшивания и/или повреждения инструмента 10. Условия, на которые могут реагировать переключатели датчиков блокировки 136a-d, включают в себя, например, отсутствие кассеты со скобами 34 в канале 22, наличие израсходованной (например, ранее отработанной) кассеты со скобами 34 в канале 22 и открытое (или в другом виде недостаточно закрытое) положение упора 24 относительно канала 22. Другие условия, на которые могут реагировать переключатели датчиков блокировки 136a-d, например износ компонента, можно выводить по суммарному количеству операций сшивания, произведенных инструментом 10. Соответственно при наличии любого из упомянутых условий соответствующие переключатели датчиков блокировки 136a-d сохраняют разомкнутое состояние переключателя и, тем самым, предотвращают прохождение тока, необходимого для включения в работу электродвигателя 65. Пропускание тока датчиками блокировки 136a-d допускается только после устранения всех таких условий. Следует понимать, что вышеописанные условия приведены только в качестве примера и что можно обеспечить дополнительные переключатели датчиков блокировки для реакции на другие условия, наносящие ущерб работе инструмента 10. Аналогичным образом следует понимать, что в вариантах осуществления, в которых одно или более из вышеописанных условий может отсутствовать или не имеет значения, число переключателей датчиков блокировки может быть меньше, чем показано.
Как показано на фиг. 11A, переключатель датчика блокировки 136a может быть реализован с использованием конфигурации нормально разомкнутого переключателя, так что замкнутое состояние переключателя сохраняется, когда кассета со скобами 34 находится в положении, соответствующем ее правильному размещению в канале 22. Когда кассета со скобами 34 не установлена в канал 22 или установлена неправильно (например, с нарушением совмещения), переключатель датчика блокировки 136a сохраняет разомкнутое состояние переключателя.
Переключатель датчика блокировки 136b может быть реализован с использованием конфигурации нормально разомкнутого переключателя, так что замкнутое состояние переключателя сохраняется только в том случае, когда в канале 22 присутствует неизрасходованная кассета со скобами 34 (т. е. кассета со скобами 34, в которой салазки 33 находятся в неактивированном положении). Наличие израсходованной кассеты со скобами 34 в канале 22 приводит к тому, что переключатель датчика блокировки 136b поддерживает разомкнутое состояние.
Переключатель датчика блокировки 136c может быть реализован с использованием конфигурации нормально разомкнутого переключателя, так что замкнутое состояние переключателя сохраняется, когда упор 24 находится в закрытом положении относительно канала 22. Как дополнительно подробнее изложено ниже, управление переключателем датчика блокировки 136c возможно в соответствии с параметром временной задержки, при этом замкнутое состояние переключателя поддерживается только после того, как упор 24 находится в закрытом положении в течение заданного периода времени.
Переключатель датчика блокировки 136d может быть реализован с использованием конфигурации нормально замкнутого переключателя, так что замкнутое состояние переключателя сохраняется только в том случае, когда суммарное число операций, произведенных инструментом 10, меньше заданного числа. Как дополнительно подробнее изложено ниже, переключатель датчика блокировки 136d может быть связан со счетным устройством 304, выполненным с возможностью ведения счета, представляющего суммарное число операций, произведенных инструментом, сравнения подсчитанного числа с заданным числом и управления состоянием переключателя датчика блокировки 136d по результатам сравнения.
В соответствии с различными вариантами осуществления цепь блокировки 137 может содержать один или более индикаторов, доступных для наблюдения пользователю инструмента 10, для отображения состояния по меньшей мере одного из переключателей датчиков блокировки 136a-c. Как показано на фиг. 11A, например, каждый переключатель датчика блокировки 136a-d может иметь зеленый светодиод 139a и красный светодиод 139b, относящиеся к данному переключателю. Цепь блокировки 137 может быть выполнена таким образом, что светодиоды 139a, b включаются, когда соответствующий переключатель датчика блокировки 136a-d сохраняется, соответственно, в замкнутом и разомкнутом состояниях блокировки. Следует понимать, что переключатели датчиков блокировки 136a-d могут содержать один или более вспомогательных переключающих контактов (не показаны) с конфигурацией переключения, позволяющей управлять светодиодами 139a, b описанным выше способом.
На фиг. 50A-51C представлены схемы установки и конфигурации переключателей датчиков блокировки 136a-d в цепи блокировки 137 в соответствии с различными вариантами осуществления настоящего изобретения. Как показано на фиг. 50A, переключатель датчика блокировки 136a может содержать первый переключающий контакт 288a и второй переключающий контакт 288b, расположенные на внутренней стенке канала 22 и электрически изолированные от него. Относительные положения первого и второго переключающих контактов 288a, b таковы, что, когда кассета со скобами 34 находится в положении, соответствующем ее правильному размещению в канале 22, проводящий или полупроводящий участок 290 кассеты со скобами 34 (представленный, в качестве примера, металлическим участком лотка кассеты со скобами 34) контактирует с первым и вторым переключающими контактами 288a, b, с образованием между ними проводящего пути.
Как лучше всего показано на фиг. 50B, каждый переключающий контакт 288a, b может иметь скругленный профиль для сведения к минимуму механического сопротивления кассете со скобами 34 при ее вхождении в канал 22 и для создания возможности надежного электрического контакта с ее проводящим участком 290. Таким образом, проводящий участок 290 выполняет функцию сохранения переключателя датчика блокировки 136a в замкнутом состоянии переключателя. Несмотря на то, что переключающие контакты 288a, b изображены расположенными смежно на участке боковой стенки канала 22, следует понимать, что каждый переключающий контакт 288a, b может по существу располагаться в любом месте внутри канала 22, в котором возможен соответствующий электрический контакт с проводящим элементом 290. Кроме того, следует понимать, что переключатель датчика блокировки 136a может, в альтернативном варианте осуществления, быть реализован с использованием традиционного контактного концевого переключателя. В соответствии с такими вариантами осуществления концевой переключатель может быть расположен таким образом, что кассета со скобами 34 при установке в канал 22 механически активирует концевой переключатель так, что поддерживается замкнутое состояние переключателя. Следует также понимать, что переключатель датчика блокировки 136a также может быть реализован с использованием традиционного бесконтактного концевого переключателя, например концевого магнитного герконового реле или бесконтактного переключателя на эффекте Холла. В соответствии с такими вариантами осуществления кассета со скобами 34 может содержать магнит, пригодный для обеспечения сохранения переключателем датчика блокировки 136a замкнутого состояния переключателя, когда установлена кассета со скобами 34.
Как лучше всего показано на фиг. 50B, переключатель датчика блокировки 136b может быть установлен на внутренней нижней поверхности канала 22. В соответствии с различными вариантами осуществления и как показано на фигуре, переключатель датчика блокировки 136b может быть реализован с использованием контактного концевого переключателя традиционной конструкции, которая пригодна для обнаружения линейного перемещения. Переключатель датчика блокировки 136b может иметь такую ориентацию, что его активированный участок проходит вверх от нижней внутренней поверхности канала 22. Переключатель датчика блокировки 136b может быть расположен на нижней поверхности канала 22 таким образом, что, когда установлена неизрасходованная кассета со скобами 34, нижний участок салазок 33 механически активирует переключатель датчика блокировки 136b и обеспечивает тем самым сохранение замкнутого состояния переключателя. Соответственно наличие неизрасходованной кассеты со скобами 34 (т. е. кассеты со скобами, имеющей салазки 33 в неактивированном положении) допускает прохождение тока через переключатель датчика блокировки 136b. Следует понимать, что переключатель датчика блокировки 136b может вместо этого быть реализован с использованием традиционного бесконтактного переключателя (например, концевого магнитного герконового реле или бесконтактного переключателя на эффекте Холла). При таких вариантах исполнения салазки 33 могут содержать намагниченный участок, который, например, активирует переключатель датчика блокировки 136b, когда салазки 33 находятся в неактивированном положении.
Как показано на фиг. 51A, переключатель датчика блокировки 136c расположен смежно дистальному концу одного из шарнирных отверстий 296, образованных на проксимальном конце канала 22 для зацепления с соответствующей осью поворота 25 упора 24. В соответствии с различными вариантами осуществления и как показано на фигуре, переключатель датчика блокировки 136c может быть реализован с использованием контактного концевого переключателя традиционной конструкции, которая пригодна для обнаружения линейного перемещения. Однако следует понимать, что взамен упомянутого переключателя можно применить бесконтактный концевой переключатель. Переключатель датчика блокировки 136c может иметь такую ориентацию, что его активированный участок проходит немного выше дистального конца соответствующего шарнирного отверстия 296. Когда упор 24 находится в открытом положении относительно канала 22 (как показано на фиг. 51A), ось поворота 25 расположена на проксимальном конце шарнирного отверстия 296. Закрытие упора 24 приводит к перемещению оси поворота 25 к дистальному концу шарнирного отверстия 296. Происходящий в результате контакт оси поворота 25 с активированным участком переключателя датчика блокировки 136c воздействует на переключатель датчика блокировки 136c и сохраняет замкнутое состояние переключателя, тем самым допуская прохождение через него тока.
В соответствии с другими вариантами осуществления и как показано на фиг. 51B, переключатель датчика блокировки 136c может вместо этого быть выполнен с возможностью сохранения замкнутого состояния переключателя в зависимости от электрического сигнала. Электрический сигнал может быть, например, аналоговым сигналом, который вырабатывается датчиком усилия 298, расположенным на нижней внутренней поверхности канала 22, и который представляет величину сжимающего усилия, прилагаемого упором 24. Таким образом, можно сделать вывод о закрытом положении упора 24, если аналоговый сигнал имеет достаточно большую величину. Соответственно аналоговый сигнал может приниматься компаратором 141, выполненным с возможностью определения того, превосходит ли его величина заданный порог, записанный в памяти компаратора. Если порог превышен, что означает закрытие упора 24, компаратор 141 воздействует на переключатель датчика блокировки 136c и сохраняет замкнутое состояние переключателя, тем самым допуская прохождение через него тока. Если величина аналогового сигнала оказывается ниже заданного порога, что означает, что упор 24 закрыт недостаточно, то компаратор 141 воздействует на переключатель датчика блокировки 136c и сохраняет разомкнутое состояние переключателя, тем самым не допуская прохождения через него тока. Следует понимать, что, хотя компаратор 141 показан отдельно, он может составлять одно целое с переключателем датчика блокировки 136c для формирования общего устройства. Кроме того, следует понимать, что заданный порог, хранящийся в памяти компаратора 141, можно при необходимости регулировать для отражения усилия, характеризующего закрытие упора 24 при разных операциях рассечения и сшивания.
В некоторых случаях может быть необходимо или, в других отношениях, желательно задерживать начало операции рассечения/сшивания на некоторый период времени после закрытия упора 24. Например, введение задержки между операциями фиксации и рассечения/сшивания может улучшать стабилизацию зафиксированной ткани. Соответственно, как показано на фиг. 51C, варианты осуществления настоящего изобретения могут содержать таймер 300, предварительно настроенный на временную задержку (например, 12-секундную) и выполненный с возможностью управления состоянием переключателя датчика блокировки 136c в соответствии с контролируемым по времени положением упора 24. Следует понимать, что, хотя таймер 300 показан отдельно, он может составлять одно целое с переключателем датчика блокировки 136c для формирования общего устройства (например, реле времени). В предпочтительном варианте таймер 300 реализован в виде электронного устройства, хотя следует понимать, что вместо него возможно применение механического таймера. Нормально разомкнутый концевой переключатель 302, выполненный идентично переключателю, показанному на фиг. 51A, может быть соединен с таймером 300 таким образом, что отсчет времени начинается, когда упор 24 находится в закрытом положении относительно канала 22. По истечении предварительно настроенной временной задержки таймер 300 воздействует на переключатель датчика блокировки 136c и сохраняет замкнутое состояние переключателя, тем самым допуская прохождения через него тока. Таймер 300 может быть сброшен в ответ на переход концевого переключателя 302 в разомкнутое состояние переключателя (т. е. когда упор 24 находится в открытом положении). Следует понимать, что по необходимости предварительно настроенную временную задержку таймера 300 можно настраивать избирательно (например, путем регулировки встроенного потенциометра).
Как также показано на фиг. 11A, электрическая цепь может содержать счетное устройство 304, выполненное с возможностью вести счет, представляющий собой суммарное число произведенных инструментом 10 операций, и с учетом подсчитанного числа управлять состоянием переключателя датчика блокировки 136d. Следует понимать, что, хотя счетное устройство 304 показано отдельно, оно может составлять одно целое с переключателем датчика блокировки 136d для формирования общего устройства. В предпочтительном варианте счетное устройство 304 реализовано в виде электронного устройства, имеющего вход для увеличения подсчитанного числа по изменению дискретного электрического сигнала, подаваемого в данное устройство. Следует понимать, что вместо вышеупомянутого варианта можно применить механический счетчик, выполненный с возможностью ведения счета на основе механического входного сигнала (например, притягивания пускового крючка 20). При реализации в виде электронного устройства в качестве входного сигнала счетного устройства 304 можно использовать любой присутствующий в электрической цепи дискретный сигнал, который изменяется один раз при каждой операции сшивания/рассечения. Как показано на фиг. 11A, например, можно использовать дискретный электрический сигнал, генерируемый в результате активации датчика окончания хода 130. Счетное устройство 304 может управлять состоянием переключателя датчика блокировки 136d таким образом, что замкнутое состояние переключателя сохраняется, когда подсчитанное число меньше заданного числа, записанного в памяти счетного устройства 304. Когда подсчитанное число оказывается равным заданному числу, счетное устройство 304 воздействует на переключатель датчика блокировки 136d и сохраняет разомкнутое состояние переключателя, тем самым не допуская прохождения через него тока. Следует понимать, что по необходимости заданное число, записанное в памяти счетного устройства 304, можно настраивать избирательно. В соответствии с различными вариантами осуществления счетное устройство 304 может быть связано с дисплеем 305, например, жидкокристаллическим дисплеем (ЖКД), составляющим одно целое с инструментом 10, для отображения пользователю либо подсчитанного числа, либо разности между заданным числом и подсчитанным числом.
Когда переключатели датчиков блокировки 136a-d совместно сохраняют замкнутое состояние переключателя, однополюсное однопозиционное реле 138 оказывается в возбужденном состоянии. Когда реле 138 находится в возбужденном состоянии, ток протекает через реле 138 и датчик резистора переменного сопротивления 110 к электродвигателю 65 через двухполюсное двухпозиционное реле 140, таким образом питая электродвигатель 65 и позволяя ему вращаться вперед. Поскольку выходной сигнал реле 138 после подачи на него напряжения поддерживает реле 138 в возбужденном состоянии, пока под напряжением находится реле 132, то цепь блокировки 137 не будет выполнять функцию предотвращения работы электродвигателя 165 после его включения, даже если один или более переключателей датчиков блокировки 136a-d впоследствии сохраняют разомкнутое состояние переключателя. Однако в других вариантах осуществления может быть необходимо или, в других отношениях, желательно соединить цепь блокировки 137 и реле 138 так, что один или более переключателей датчиков блокировки 136a-d должны сохранять замкнутое состояние переключателя для поддержания работы электродвигателя 165 после его включения.
Вращение электродвигателя вперед заставляет кольцо 84 перемещаться дистально и тем самым выключает переключатель датчика останова электродвигателя 142. Так как переключатель 142 является нормально замкнутым, электромагнит 306 при этом оказывается под напряжением. Электромагнит 306 может быть обычным выталкивающим соленоидом, который под напряжением вызывает аксиальное выдвижение сердечника (на фигуре не показан). Как обсуждается ниже в связи с фиг. 14-22, выдвижение сердечника может выполнять функцию фиксации закрывающего спускового механизма 18 в отведенном назад положении, предотвращая тем самым открытие упора 24 в то время, когда выполняется операция сшивания (т. е. в то время, когда переключатель 142 не активирован). После обесточивания электромагнита 306 сердечник отводится назад, так что оказывается возможным ручное высвобождение закрывающего спускового механизма 18.
Когда концевой эффектор 12 достигает конца хода, активируется датчик обратного действия 130, замыкая переключатель 130 и пропуская ток к реле 132. Это приводит к тому, что реле 132 переходит в возбужденное состояние, при этом ток течет не через цепь блокировки 137 и резистор переменного сопротивления 110, а проходит как к нормально замкнутому двухполюсному двухпозиционному реле 140, так и к электродвигателю 65, но через реле 140, что заставляет электродвигатель 65 изменить направление вращения.
Поскольку переключатель датчика останова электродвигателя 142 в обычном состоянии замкнут, то ток будет подаваться обратно к реле 132 для поддержания его в возбужденном состоянии до тех пор, пока переключатель 142 не будет разомкнут. Когда скальпель 32 находится в полностью втянутом положении, переключатель датчика останова электродвигателя 142 активируется и размыкается, прекращая тем самым подачу питания на электродвигатель 65 и снимая напряжение с электромагнита 306.
В других вариантах осуществления вместо пропорционального датчика 110 можно использовать двухпозиционный датчик. В таких вариантах осуществления скорость вращения электродвигателя 65 может быть не пропорциональной силе, приложенной оператором. Как правило, электродвигатель 65 будет вращаться по существу с постоянной скоростью. Тем не менее, оператор получает обратную связь относительно усилия, так как пусковой крючок 20 включен в цепь зубчатых передач привода.
На фиг. 12 представлен вид сбоку рукоятки 6 эндокатера с электроприводом и усилителем в соответствии с другим вариантом осуществления. Вариант осуществления, представленный на фиг. 12, аналогичен варианту осуществления, представленному на фиг. 7-10, за исключением того, что вариант осуществления, представленный на фиг. 12, не имеет кулисы, соединенной с кольцом 84, навинченным на барабан с винтовой зубчатой передачей 80. Вместо этого в варианте осуществления, представленном на фиг. 12, кольцо 84 включает в себя часть с датчиком 114, которая перемещается с кольцом 84, когда кольцо 84 продвигается вниз (и назад) по барабану с винтовой зубчатой передачей 80. Часть с датчиком 114 включает в себя выемку 116. Датчик обратного действия 130 может быть расположен на дистальном конце выемки 116, и датчик останова электродвигателя 142 может быть расположен на проксимальном конце выемки 116. Когда кольцо 84 продвигается вниз (и назад) по барабану с винтовой зубчатой передачей 80, часть с датчиком 114 продвигается вместе с ним. Кроме того, как показано на фиг. 12, срединная часть 104 может иметь плечо 118, которое входит в выемку 12.
Во время работы, когда оператор инструмента 10 прижимает пусковой крючок 20 к пистолетной рукоятке 26, датчик запуска электродвигателя 110 определяет это движение и направляет сигнал к началу работы на электродвигатель 65, что вызывает, помимо прочего, вращение барабана с винтовой зубчатой передачей 80. Когда барабан с винтовой зубчатой передачей 80 вращается, кольцо 84, навинченное на барабан с винтовой зубчатой передачей 80, продвигается вперед (или назад, в зависимости от направления вращения). Кроме того, при прижимании пускового крючка 20 срединная часть 104 вращается против часовой стрелки вместе с пусковым крючком 20 за счет ограничителя рабочего хода 107, который сцеплен с пусковым крючком 20. При вращении срединной части 104 против часовой стрелки плечо 118 вращается против часовой стрелки вместе с частью с датчиком 114 на кольце 84 таким образом, чтобы плечо 118 оставалось в выемке 116. Когда кольцо 84 достигает дистального конца барабана с винтовой зубчатой передачей 80, плечо 118 входит в контакт с датчиком обратного действия 130 и тем самым активирует его. Аналогичным образом, когда кольцо 84 достигает проксимального конца барабана с винтовой зубчатой передачей 80, плечо входит в контакт с датчиком останова электродвигателя 142 и активирует его. Такими действиями можно изменить направление вращения электродвигателя 65 и остановить его соответственно, как описано выше.
На фиг. 13 представлен вид сбоку рукоятки 6 эндокатера с электроприводом и усилителем в соответствии с другим вариантом осуществления. Вариант осуществления, представленный на фиг. 13, аналогичен варианту осуществления, представленному на фиг. 7-10, за исключением того, что в варианте осуществления, представленном на фиг. 13, кулиса 90 не имеет прорези. Вместо этого кольцо 84, навинченное на барабан с винтовой зубчатой передачей 80, имеет вертикальный канал 126. Вместо прорези кулиса 90 имеет опору 128, которая расположена в канале 126. Когда барабан с винтовой зубчатой передачей 80 вращается, кольцо 84, навинченное на барабан с винтовой зубчатой передачей 80, продвигается вперед (или назад, в зависимости от направления вращения). Кулиса 90 вращается против часовой стрелки, в то время когда кольцо 84 продвигается благодаря тому, что опора 128 расположена в канале 126, как показано на фиг. 13.
Как было указано выше, при использовании двухтактного инструмента с электроприводом оператор сначала притягивает и блокирует закрывающий спусковой механизм 18. На фиг. 14 и 15 показан один вариант осуществления способа блокировки закрывающего спускового механизма 18 на части пистолетной рукоятки 26 рукоятки 6. В показанном варианте осуществления изобретения часть пистолетной рукоятки 26 включает в себя крючок 150, отклоняющийся для поворота против часовой стрелки вокруг оси поворота 151 под действием торсионной пружины 152. Закрывающий спусковой механизм 18 также включает в себя запирающую пластину 154. Когда оператор притягивает закрывающий спусковой механизм 18, запирающая пластина 154 зацепляется за скошенную часть 156 крючка 150, поворачивая, тем самым, крючок 150 вверх (или по часовой стрелке, как показано на фиг. 14-15) до тех пор, пока запирающая пластина 154 полностью не пройдет скошенную часть 156 и не войдет в утопленную выемку 158 крючка 150, фиксируя положение закрывающего спускового механизма 18. Оператор может разблокировать закрывающий спусковой механизм 18, сдвигая вниз скользящую пусковую кнопку 160 на задней или противоположной стороне части пистолетной рукоятки 26. При сдвигании скользящей пусковой кнопки 160 вниз происходит вращение крючка 150 по часовой стрелке так, что запирающая пластина 154 высвобождается из утопленной выемки 158. Для предотвращения непреднамеренного открытия упора 24 во время выполнения операции сшивания электромагнит 306 можно установить внутри пистолетной рукоятки 26 таким образом, чтобы сердечник 308 электромагнита 306, когда последний находится под напряжением, входил в соответствующее отверстие 163 скользящей пусковой кнопки 160. Соответственно скользящая пусковая кнопка 160 будет зафиксирована на месте таким образом, что скользящая пусковая кнопка 160 будет заблокирована до тех пор, пока сердечник 308 не выйдет из отверстия 163 в конце операции сшивания.
На фиг. 16 показан другой механизм блокировки закрывающего спускового механизма в соответствии с различными вариантами осуществления. В варианте осуществления, представленном на фиг. 16, закрывающий спусковой механизм 18 включает в себя клин 160, имеющий стреловидную часть 161, которая выполнена с возможностью опускания вниз (или в направлении по часовой стрелке) под действием пластинчатой пружины 162. Клин 160 и пластинчатая пружина 162 могут быть выполнены, например, из формованного пластика. При втягивании закрывающего спускового механизма 18 стреловидная часть 161 входит в отверстие 164 в части пистолетной рукоятки 26 рукоятки 6. Нижняя скошенная поверхность 166 стреловидной части 161 зацепляется за нижнюю боковую стенку 168 отверстия 164, заставляя стреловидную часть 161 поворачиваться против часовой стрелки. В результате этого нижняя скошенная поверхность 166 полностью заходит за нижнюю боковую стенку 168, сила, поворачивающая стреловидную часть 161 против часовой стрелки, прекращает воздействие на нее, при этом нижняя боковая стенка 168 фиксирует стреловидную часть 161 в закрытом положении, зацепляясь за выемку 170.
Чтобы разблокировать закрывающий спусковой механизм 18, пользователь нажимает кнопку 172 на противоположной стороне закрывающего спускового механизма 18, что заставляет стреловидную часть 161 поворачиваться против часовой стрелки и позволяет стреловидной части 161 выскользнуть из отверстия 164. Для предотвращения непреднамеренного раскрытия упора 24 во время выполнения операции сшивания электромагнит 306 можно расположить внутри пистолетной рукоятки 26 таким образом, чтобы сердечник 308 электромагнита 306, когда последний находится под напряжением, входил в соответствующее отверстие 173, образованное в стреловидном участке 161. Введенный в отверстие 173 сердечник 308 выполняет функцию предотвращения поворота стреловидного участка 161 против часовой стрелки. Соответственно кнопка 172 защищена от непреднамеренного манипулирования пользователем до тех пор, пока сердечник 308 не будет выведен из отверстия 173 в конце операции сшивания.
На фиг. 17-22 показан механизм блокировки закрывающего спускового механизма в соответствии с другим вариантом осуществления. Как показано в этом варианте осуществления, закрывающий спусковой механизм 18 включает в себя гибкое продольное плечо 176, имеющее выступающий из него боковой штифт 178. Плечо 176 и штифт 178 могут быть выполнены, например, из формованного пластика. Часть пистолетной рукоятки 26 рукоятки 6 включает в себя отверстие 180 с расположенным в нем латерально проходящим клином 182. При втягивании закрывающего спускового механизма 18 штифт 178 зацепляется за клин 182, затем штифт 178 продвигается нижней поверхностью 184 клина 182 вниз (то есть плечо 176 поворачивается по часовой стрелке), как показано на фиг. 17 и 18. Когда штифт 178 полностью заходит за нижнюю поверхность 184, сила, заставляющая плечо 176 двигаться по часовой стрелке, прекращает свое действие, и штифт 178 поворачивается против часовой стрелки, при этом штифт 178 останавливается в выемке 186 за клином 182, как показано на фиг. 19, фиксируя таким образом закрывающий спусковой механизм 18. Штифт 178 удерживается на месте в закрытом положении гибким ограничителем хода 188, проходящим из клина 184.
Чтобы разблокировать закрывающий спусковой механизм 18, оператор может дополнительно надавить на закрывающий спусковой механизм 18, чтобы штифт 178 зацепился за наклонную заднюю стенку 190 отверстия 180, при этом штифт 178 перемещается вверх за гибкий ограничитель хода 188, как показано на фиг. 20 и 21. Затем штифт 178 свободно выходит через верхний канал 192 отверстия 180, так что закрывающий спусковой механизм 18 больше не находится в блокированном положении на части пистолетной рукоятки 26, как показано на фиг. 22. Для предотвращения непреднамеренного раскрытия упора 24 во время выполнения операции сшивания электромагнит 306 можно расположить внутри пистолетной рукоятки 26 таким образом, чтобы сердечник 308 электромагнита 306, когда последний находится под напряжением, входил в верхний канал 192. Введенный в верхний канал 192 сердечник 308 выполняет функцию предотвращения перемещения штифта 178 по каналу. Соответственно закрывающий спусковой механизм 18 защищен от разблокирования до тех пор, пока сердечник 308 не будет выведен из верхнего канала 192 в конце операции сшивания.
На фиг. 23A-B показан универсальный шарнир (u-образный шарнир) 195. Вторая деталь 195-2 u-образного шарнира 195 вращается в горизонтальной плоскости, в которой расположена первая деталь 195-1. На фиг. 23A показан u-образный шарнир 195 в линейном (180°) расположении, а на фиг. 23B показан u-образный шарнир 195 под углом приблизительно 150°. U-образный шарнир 195 можно использовать вместо конических зубчатых колес 52a-c (см. для примера фиг. 4) в шарнирном сочленении 14 узла основного приводного стержня для шарнирного поворота концевого эффектора 12. На фиг. 24A-B показан кабель кручения 197, который можно использовать как вместо конических зубчатых колес 52a-c, так и вместо u-образного шарнира 195 для шарнирного поворота концевого эффектора 12.
На фиг. 25-31 представлен другой вариант осуществления двухтактного хирургического режуще-сшивающего инструмента 10 с электроприводом и усилителем в соответствии с другим вариантом осуществления настоящего изобретения. Вариант осуществления, представленный на фиг. 25-31, аналогичен варианту осуществления, представленному на фиг. 6-10, за исключением того, что вместо барабана с винтовой зубчатой передачей 80 вариант осуществления, представленный на фиг. 23-28, включает в себя альтернативный узел зубчатой передачи. Вариант осуществления, представленный на фиг. 25-31, включает в себя узел редуктора 200, включающий в себя несколько зубчатых колес, расположенных в раме 201, при этом зубчатые колеса связаны между планетарной передачей 72 и ведущей шестерней 124 на проксимальном конце приводного стержня 48. Как описано ниже, узел редуктора 200 обеспечивает обратную связь с пользователем через пусковой крючок 20, информируя о приведении в рабочее положение и силе нагрузки концевого эффектора 12. Также пользователь может приложить усилие к системе через узел редуктора 200, помогая привести концевой эффектор 12 в рабочее положение. В этом отношении, аналогично описанным выше вариантам осуществления, вариант осуществления, представленный на фиг. 23-32, представляет собой другой инструмент 10 с электроприводом и усилителем, который обеспечивает обратную связь пользователю относительно величины приложенной к инструменту нагрузки.
В представленном варианте осуществления пусковой крючок 20 состоит из двух частей: основной части 202 и жесткой части 204. Основная часть 202 может быть выполнена, например, из пластика, а жесткая часть 204 может быть выполнена из более твердого материала, например, металла. В представленном варианте осуществления жесткая часть 204 примыкает к основной части 202, однако в соответствии с другими вариантами осуществления жесткая часть 204 может быть помещена внутрь основной части 202. Шарнирный штифт 207 может быть вставлен через отверстия в частях 202 и 204 пускового крючка и являться точкой, вокруг которой поворачивается пусковой крючок 20. Кроме того, пружина 222 может смещать пусковой крючок 20 для поворота в направлении против часовой стрелки. Дистальный конец пружины 222 может быть связан со штифтом 224, который связан с частями 202 и 204 пускового крючка 20. Проксимальный конец пружины 222 может быть связан с одной из деталей внешней нижней стороны 59 и 60 рукоятки.
В показанном варианте осуществления как основная часть 202, так и жесткая часть 204 включают в себя передаточные части 206 и 208 (соответственно) на своих верхних торцевых частях. Передаточные части 206 и 208 зацепляют шестерню в узле редуктора 200, как описано ниже, приводя в движение узел основного приводного стержня и обеспечивая пользователю обратную связь относительно приведения концевого эффектора 12 в рабочее положение.
Узел редуктора 200 может включать в себя, как показано в представленном варианте осуществления, 6 (шесть) зубчатых колес. Первое зубчатое колесо 210 узла редуктора 200 зацепляет передаточные части 206 и 208 пускового крючка 20. Кроме того, первое зубчатое колесо 210 зацепляет меньшее по размеру второе зубчатое колесо 212, причем меньшее по размеру второе зубчатое колесо 212 расположено соосно с большим третьим зубчатым колесом 214. Третье зубчатое колесо 214 зацепляет меньшее по размеру четвертое зубчатое колесо 216, которое расположено соосно с пятым зубчатым колесом 218. Пятое зубчатое колесо 218 представляет собой 90° коническое зубчатое колесо, которое зацепляет сопряженное 90° коническое зубчатое колесо 220 (как лучше всего показано на фиг. 31), которое соединено с ведущей шестерней 124, которая приводит в движение основной приводной стержень 48.
В процессе работы, когда пользователь прижимает пусковой крючок 20, активируется датчик запуска электродвигателя (не показан), направляя электродвигателю 65 сигнал для вращения со скоростью, пропорциональной степени или силе, с которой оператор притягивает пусковой крючок 20, что заставляет электродвигатель 65 вращаться со скоростью, пропорциональной сигналу от датчика. В данном варианте осуществления датчик не показан, однако он может быть аналогичен датчику запуска электродвигателя 110, описанному выше. Датчик может быть расположен в рукоятке 6 таким образом, чтобы он нажимался при притягивании пускового крючка 20. Также вместо пропорционального датчика можно использовать двухпозиционный датчик.
Вращение электродвигателя 65 вызывает вращение конических зубчатых колес 68 и 70, что, в свою очередь, вызывает вращение планетарной передачи 72 и через приводной стержень 76 - вращение кольцевого зубчатого колеса 122. Кольцевое зубчатое колесо 122 зацепляет ведущую шестерню 124, которая соединена с основным приводным стержнем 48. Таким образом, вращение ведущей шестерни 124 приводит в действие основной приводной стержень 48, в результате чего активируется операция по рассечению/сшиванию концевым эффектором 12.
Вращение ведущей шестерни 124 в прямом направлении, в свою очередь, вызывает вращение конического зубчатого колеса 220, что при неподвижных зубчатых колесах узла редуктора 200 вызывает вращение первого зубчатого колеса 210. Первое зубчатое колесо 210 зацепляет передаточные части 206 и 208 пускового крючка 20, вызывая поворот пускового крючка 20 против часовой стрелки, когда электродвигатель 65 продвигает концевой эффектор 12 вперед (и поворот против часовой стрелки, когда электродвигатель 65 вращается в обратном направлении, втягивая концевой эффектор 12). Таким образом, пользователь получает обратную связь относительно силы нагрузки и приведения концевого эффектора 12 в рабочее положение при нажатии на пусковой крючок 20. Таким образом, когда пользователь притягивает пусковой крючок 20, он испытывает сопротивление, связанное с силой нагрузки, приложенной к концевому эффектору 12. Аналогичным образом, когда оператор отпускает пусковой крючок 20 после выполнения операции по рассечению/сшиванию, чтобы вернуть его в первоначальное положение, он может ощущать силу, с которой происходит поворот пускового крючка 20 по часовой стрелке и которая по существу пропорциональна скорости вращения электродвигателя 65 в обратном направлении.
Необходимо отметить, что в данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе электродвигателя 65), чтобы активировать узел основного приводного стержня (и, следовательно, концевой эффектор 12 во время операции по рассечению/сшиванию), путем притягивая пускового крючка 20. То есть при притягивании пускового крючка 20 передаточные части 206 и 208 поворачиваются против часовой стрелки, что приводит к вращению зубчатых колес узла редуктора 200, вызывая таким образом вращение ведущей шестерни 124 и основного приводного стержня 48.
Хотя на фиг. 25-31 это не показано, инструмент 10 может дополнительно включать в себя датчик обратного действия и датчик останова электродвигателя. Как описано выше, датчик обратного действия и датчик останова электродвигателя могут определять, соответственно, завершение режущего хода (полное введение скальпеля 32) и завершение действия втягивания (полное втягивание скальпеля 32). Для соответствующего питания электродвигателя 65 можно использовать цепь, аналогичную описанной выше и приведенной на фиг. 11.
На фиг. 32-36 изображен двухтактный хирургический режуще-сшивающий инструмент 10 с электроприводом и усилителем в соответствии с другим вариантом осуществления. Вариант осуществления, представленный на фиг. 32-36, аналогичен варианту осуществления, представленному на фиг. 25-31, за исключением того, что в варианте осуществления, представленном на фиг. 32-36, пусковой крючок 20 включает в себя нижнюю часть 228 и верхнюю часть 230. Обе части 228 и 230 соединены с шарнирным штифтом 207, который проходит через каждую часть 228 и 230, и поворачиваются вокруг него. Верхняя часть 230 включает в себя передаточную часть 232, которая зацепляет первое зубчатое колесо 210 узла редуктора 200. Пружина 222 соединена с верхней частью 230 и воздействует на нее таким образом, что верхняя часть поворачивается по часовой стрелке. Верхняя часть 230 может также включать в себя нижнее плечо 234, которое контактирует с верхней поверхностью нижней части 228 пускового крючка 20, так что, когда верхняя часть 230 поворачивается по часовой стрелке, нижняя часть 228 также поворачивается по часовой стрелке, и когда нижняя часть 228 поворачивается против часовой стрелки, верхняя часть 230 также поворачивается против часовой стрелки. Кроме того, нижняя часть 228 включает в себя ограничитель поворота 238, который зацепляет плечо верхней части 230. Таким образом, когда верхняя часть 230 начинает поворачиваться против часовой стрелки, нижняя часть 228 также поворачивается против часовой стрелки, и, когда нижняя часть 228 поворачивается по часовой стрелке, верхняя часть 230 также поворачивается по часовой стрелке.
Показанный вариант осуществления также включает в себя датчик запуска электродвигателя 110, который направляет сигнал к электродвигателю 65, что в различных вариантах осуществления может вызывать вращение электродвигателя 65 со скоростью, пропорциональной силе, приложенной оператором при притягивании пускового крючка 20. Датчик 110 может представлять собой, например, реостат или иной датчик переменного сопротивления, как описано в настоящем документе. Кроме того, инструмент 10 может включать в себя датчик обратного действия 130, который задействуется или переключается в случае контакта с фронтальной поверхностью 242 верхней части 230 пускового крючка 20. После активации датчик обратного действия 130 направляет электродвигателю 65 сигнал об изменении направления вращения. Кроме того, инструмент 10 может включать в себя датчик останова электродвигателя 142, который задействуется или активируется в случае контакта с нижней частью 228 пускового крючка 20. После активации датчик останова электродвигателя 142 направляет электродвигателю 65 сигнал о прекращении вращения в обратном направлении.
В процессе работы, когда оператор притягивает закрывающий спусковой механизм 18 в заблокированное положение, пусковой крючок 20 несколько притягивается (с помощью известных в данной области механизмов, включая патент США № 6978921, авторы Frederick Shelton, IV et al., и патент США № 6905057, авторы Jeffery S. Swayze et al., которые полностью включены в настоящий документ путем ссылки), при этом пользователь может зажать пусковой крючок 20, чтобы инициировать рассечение/сшивание, как показано на фиг. 32 и 33. В этот момент, как показано на фиг. 33, передаточная часть 232 верхней части 230 пускового крючка 20 перемещается в зацепление с первым зубчатым колесом 210 узла редуктора 200. Когда оператор притягивает пусковой крючок 20, в соответствии с различными вариантами осуществления, пусковой крючок 20 может немного повернуться, например, на пять градусов, прежде чем сдвинуть датчик запуска электродвигателя 110, как показано на фиг. 34. Активация датчика 110 вызывает вращение электродвигателя 65 в прямом направлении со скоростью, пропорциональной силе, которую прикладывает оператор. Вращение электродвигателя 65 в прямом направлении вызывает, как описано выше, вращение основного приводного стержня 48, что, в свою очередь, инициирует процесс приведения скальпеля 32 в концевом эффекторе 12 в рабочее положение (то есть скальпель начинает продвигаться по каналу 22). Вращение ведущей шестерни 124, которая связана с основным приводным стержнем 48, вызывает вращение зубчатых колес 210-220 в узле редуктора 200. Так как первое зубчатое колесо 210 находится в зацеплении с передаточной частью 232 верхней части 230 пускового крючка 20, верхняя часть 232 поворачивается против часовой стрелки, что вызывает поворот нижней части 228 также против часовой стрелки.
Когда скальпель 32 полностью находится в рабочем положении (то есть находится в конце рабочего хода), фронтальная поверхность 242 верхней части 230 активирует датчик обратного действия 130, который направляет электродвигателю 65 сигнал об изменении направления вращения на противоположное. Это приводит к изменению направления вращения узла основного приводного стержня и втягиванию скальпеля 32. Вращение узла основного приводного стержня в обратном направлении также приводит к изменению направления вращения зубчатых колес 210-220 в узле редуктора, что приводит к повороту по часовой стрелке верхней части 230 пускового крючка 20 и повороту по часовой стрелке нижней части 228 пускового крючка 20 до тех пор, пока нижняя часть 228 не сдвинет или активирует датчик останова электродвигателя 142, когда скальпель 32 полностью втянут, что вызовет остановку электродвигателя 65. Таким образом, пользователь получает обратную связь относительно приведения концевого эффектора 12 в рабочее положение при нажатии на пусковой крючок 20. Таким образом, когда пользователь притягивает пусковой крючок 20, он испытывает сопротивление, соотносимое с приведением концевого эффектора 12 в рабочее положение и, в частности, с силой нагрузки, приложенной к скальпелю 32. Аналогичным образом, когда оператор отпускает пусковой крючок 20 после выполнения операции по рассечению/сшиванию, чтобы вернуть его в первоначальное положение, он может ощущать силу, с которой происходит поворот пускового крючка 20 по часовой стрелке и которая по существу пропорциональна скорости вращения электродвигателя 65 в обратном направлении.
Необходимо отметить, что в данном варианте осуществления пользователь может приложить силу (вместо или в дополнение к силе электродвигателя 65), чтобы активировать узел основного приводного стержня (и, следовательно, концевой эффектор 12 во время операции по рассечению/сшиванию) путем притягивая пускового крючка 20. То есть при притягивании пускового крючка 20 передаточная часть 232 верхней части 230 поворачивается против часовой стрелки, что приводит к вращению зубчатых колес узла редуктора 200 и, таким образом, вращению ведущей шестерни 124 и узла основного приводного стержня.
В описанных выше вариантах осуществления используются системы обратной связи с усилителем, в которых предусмотрено или не предусмотрено адаптивное управление (например, использование датчиков 110, 130 и 142 за пределами замкнутой системы электродвигателя 65, цепи зубчатых передач привода и концевого эффектора 12) двухтактным хирургическим режуще-сшивающим инструментом с электроприводом. То есть сила, приложенная пользователем для притягивания пускового крючка 20, может являться дополнением к силе, приложенной электродвигателем 65, вследствие того, что пусковой крючок 20 включен (напрямую или опосредованно) в цепь зубчатых передач привода между электродвигателем 65 и основным приводным стержнем 48. В других вариантах осуществления настоящего изобретения пользователю может быть обеспечена тактильная обратная связь относительно положения скальпеля 32 в концевом эффекторе, при которой не происходит включения пускового крючка 20 в цепь зубчатых передач привода. На фиг. 37-40 показан хирургический режуще-сшивающий инструмент с электроприводом и такой системой тактильной позиционной обратной связи.
В показанном на фиг. 37-40 варианте осуществления пусковой крючок 20 может иметь нижнюю часть 228 и верхнюю часть 230 по аналогии с инструментом 10, показанным на фиг. 32-36. Однако в отличие от варианта осуществления, показанного на фиг. 32-36, верхняя часть 230 не имеет передаточной части, которая сопрягается с частью цепи зубчатых передач привода. Вместо этого инструмент включает в себя второй электродвигатель 265 с ввинченным в него резьбовым штоком 266. При вращении электродвигателя 265 резьбовой шток 266 совершает продольные возвратно-поступательные движения в электродвигатель 265 или из него, в зависимости от направления вращения. Инструмент 10 также включает в себя датчик положения 268, который реагирует на вращение основного приводного стержня 48, преобразуя инкрементное вращательное движение основного приводного стержня 48 (или другого компонента основного приводного узла), например, в соответствующие последовательности цифровых сигналов. В показанном варианте осуществления ведущая шестерня 124 включает в себя проксимальный приводной стержень 270, который соединен с датчиком положения 268.
Инструмент 10 также включает в себя цепь управления (не показана), которая может быть реализована с помощью микроконтроллера или иной интегральной схемы, принимающей цифровые сигналы от датчика положения 268. На основе сигналов от датчика положения 268 цепь управления может определять степень продвижения скальпеля 32 в концевом эффекторе 12. То есть цепь управления может определять, находится ли скальпель 32 в полностью рабочем, полностью втянутом или промежуточном положении. Определив рабочее положение концевого эффектора 12, цепь управления может направить сигнал второму электродвигателю 265 для управления его вращением и, таким образом, возвратно-поступательным движением резьбового штока 266.
В процессе работы, как показано на фиг. 37, когда закрывающий спусковой механизм 18 не заблокирован в закрытом положении, пусковой крючок 20 повернут от части пистолетной рукоятки 26 рукоятки 6 таким образом, что фронтальная поверхность 242 верхней части 230 пускового крючка 20 не контактирует с проксимальным концом резьбового штока 266. Когда оператор притягивает закрывающий спусковой механизм 18 и фиксирует его в закрытом положении, пусковой крючок 20 несколько поворачивается к закрывающему спусковому механизму 20, так что оператор может зажать пусковой крючок 20, как показано на фиг. 38. В этом положении фронтальная поверхность 242 верхней части 230 контактирует с проксимальным концом резьбового штока 266.
Когда пользователь притягивает пусковой крючок 20, после того как он пройдет некоторое начальное расстояние (например, после поворота на 5 градусов), может быть активирован датчик запуска электродвигателя 110, при этом, как описано выше, датчик 110 направляет сигнал электродвигателю 65, вызывая его вращение в прямом направлении со скоростью, пропорциональной силе притягивания, приложенной оператором к пусковому крючку 20. Вращение электродвигателя 65 в прямом направлении через цепь зубчатых передач привода вызывает вращение основного приводного стержня 48, что заставляет скальпель 32 и салазки 33 проходить вниз по каналу 22 и рассекать ткань, захваченную концевым зажимом 12. Цепь управления принимает выходные сигналы с датчика положения 268 относительно инкрементного вращения узла основного приводного стержня и направляет сигнал второму электродвигателю 265, вызывая его вращение, в результате чего резьбовой шток 266 втягивается в электродвигатель 265. Это приводит к повороту верхней части 230 пускового крючка 20 против часовой стрелки, в результате чего происходит поворот нижней части 228 пускового крючка также против часовой стрелки. Таким образом, поскольку возвратно-поступательное перемещение резьбового штока 266 связано с вращением узла основного приводного стержня, оператор инструмента 10 прижимает пусковой крючок 20 и получает тактильную обратную связь о положении концевого зажима 12. Однако сила притягивания, которую прикладывает оператор, не влияет напрямую на движение узла основного приводного стержня, так как в данном варианте осуществления пусковой крючок 20 не является частью цепи зубчатых передач привода.
Контролируя инкрементное вращение узла основного приводного стержня по выходным сигналам датчика положения 268, цепь управления может определять, когда скальпель 32 находится в полностью рабочем положении (то есть полностью выдвинут). В этот момент цепь управления может направить электродвигателю 65 сигнал об изменении направления вращения для втягивания скальпеля 32. Вращение электродвигателя 65 в обратном направлении приводит к изменению направления вращения узла основного приводного стержня, что также определяется датчиком положения 268. На основе сигнала датчика положения 268 о вращении в обратном направлении цепь управления направляет сигнал второму электродвигателю 265, заставляя его изменить направление вращения на противоположное, так что резьбовой шток 266 начинает продвигаться из электродвигателя 265 в продольном направлении. Это движение заставляет верхнюю часть 230 пускового крючка 20 поворачиваться по часовой стрелке, что приводит к повороту по часовой стрелке нижней части 228. Таким образом, оператор может почувствовать силу движения пускового крючка 20 по часовой стрелке, что обеспечивает оператору обратную связь о положении скальпеля 32 в концевом эффекторе 12. Цепь управления может определить, когда скальпель 32 находится в полностью втянутом положении. В этот момент цепь управления может направить электродвигателю 65 сигнал для прекращения вращения.
В соответствии с другими вариантами осуществления, вместо цепи управления, определяющей положение скальпеля 32, могут быть использованы датчик обратного действия и датчик останова электродвигателя, как описано выше. Кроме того, вместо пропорционального датчика 110 для управления вращением электродвигателя 65 можно использовать двухпозиционный датчик. В таком варианте осуществления оператор не может контролировать скорость вращения электродвигателя 65, однако электродвигатель может вращаться с предварительно определенной скоростью.
На фиг. 41-43 представлен пример осуществления эндокатера с механическим приводом и, в частности, его рукоятка 6, стержень 8 и концевой эффектор 12. Более подробное описание эндокатера с механическим приводом приведено в патенте США № 11/052632 под названием «Хирургический сшивающий инструмент, включающий многотактовый пусковой механизм с автоматическим втягиванием после окончания хода», в настоящее время патент США № 7083075, который включен в настоящий документ путем ссылки. Как показано на фиг. 41, концевой эффектор 12 реагирует на закрывающее движение от рукоятки 6 (не показана на фиг. 41) сначала путем включения поверхности упора 1002, соединяющейся с проксимальным концом упора 1004, который включает в себя выходящие латерально шарнирные штифты 25 упора, находящиеся проксимально к вертикально выходящему язычку упора 27. Шарнирные штифты упора 25 сдвигаются внутри серповидных отверстий 1006 в канале для скоб 22, открывая и закрывая упор 24 относительно канала 22. Язычок 27 зацепляет изогнутый язычок 1007, проходящий вовнутрь в отверстии язычка 45 на дистальном конце 1008 закрывающей трубки 1005, которая дистально прерывается дистальным краем 1008, толкающим поверхность упора 1002. Таким образом, когда закрывающая трубка 1005 перемещается проксимально из открытого положения, изогнутый язычок 1007 закрывающей трубки 1005 тянет язычок упора 27 проксимально, и шарнирные штифты упора 25 продвигаются по серповидным отверстиям 1006 канала для скоб 22, одновременно сдвигая упор 24 проксимально и поворачивая вверх в открытое положение. Когда закрывающая трубка 1005 перемещается дистально, изогнутый язычок 1007 в отверстии язычка 45 высвобождает язычок упора 27, и дистальный конец 1008 толкает поверхность упора 1002, закрывая упор 24.
Как также показано на фиг. 41, стержень 8 и концевой эффектор 12 также включают в себя компоненты, которые реагируют на пусковое движение пускового штока 1010. В частности, пусковой шток 1010 зацепляет с возможностью вращения пусковой кюветообразный элемент 1012 с продольной выемкой 1014. Пусковой кюветообразный элемент 1012 перемещается продольно внутри рамы 1016 в ответ на продольное движение пускового штока 1010. Продольный паз 1018 в закрывающей трубке 1005 функционально связан с правой и левой деталями рукоятки внешней стороны 61, 62 рукоятки 6 (не показаны на фиг. 41). Длина продольного паза 1018 в закрывающей трубке 1005 достаточна для относительного продольного движения деталей рукоятки 61 и 62 для выполнения пускового и закрывающего движений соответственно с присоединением деталей рукоятки 61 и 62, проходящих через продольный паз 1020 в раму 1016, чтобы зацепить с возможностью скольжения продольную выемку 1014 в кюветообразном элементе рамы 1012.
Дистальный конец кюветообразного элемента рамы 1012 прикреплен к проксимальному концу пускового стержня 1022, который перемещается внутри рамы 1016, в частности внутри ее направителя 1024 для дистального продвижения скальпеля 32 в концевой эффектор 12. Концевой эффектор 12 включает в себя кассету со скобами 34, которая активируется скальпелем 32. Кассета со скобами 34 имеет лоток 290, который удерживает корпус кассеты со скобами 1030, выталкиватель клиновидных салазок 33, выталкиватель скоб 1034 и скобы 1036. Следует понимать, что выталкиватель клиновидных салазок 33 перемещается продольно в пределах пусковой выемки (не показана), расположенной между лотком кассеты 290 и корпусом кассеты 1030. Выталкиватель клиновидных салазок 33 имеет кулачковые поверхности, контактирующие с выталкивателями скоб 1034 и поднимающие их вверх, продвигая скобы 1036. Корпус кассеты со скобами 1030 дополнительно включает в себя проксимально открытый вертикальный паз 1031 для прохождения скальпеля 32. В частности, вдоль дистального конца скальпеля 32 предусмотрена режущая поверхность 1027 для рассечения ткани после скрепления скобами.
Следует понимать, что стержень 8, показанный на фиг. 4, не предусматривает возможности шарнирного сочленения. Однако в зависимости от области применения настоящего изобретения в инструментах допускается использовать шарнирное сочленение, например, как показано на фиг. 1-4 и описано в следующих патентах и заявках на патенты США, содержание которых полностью включено в настоящий документ путем ссылки: (1) «Хирургический инструмент с шарнирным механизмом, поворачивающимся вокруг продольной оси», публикация заявки на патент США № 2005/0006434, авторы: Frederick E. Shelton IV, Brian J. Hemmelgarn, Jeffrey S. Swayze, Kenneth S. Wales, поданная 9 июля 2003 г., в настоящее время патент США № 7111769; (2) «Хирургический сшивающий инструмент с шарнирным сочленением для направления стержня пускового механизма», патент США № 6786382, автор Brian J. Hemmelgarn; (3) «Хирургический инструмент с устройством управления шарнирным сочленением, перемещаемым в горизонтальном направлении», патент США № 6981628, автор Jeffrey S. Swayze; (4) «Хирургический сшивающий инструмент, включающий конусный пусковой стержень для увеличения гибкости в шарнирном сочленении», патент США № 6964363, авторы: Frederick E. Shelton IV, Michael Setser, Bruce Weisenburgh II; и (5) «Хирургический сшивающий инструмент, имеющий опорные пластины шарнирного сочленения для поддержки пускового стержня», публикация заявки на патент США № 2005/0006431, авторы Jeffrey S. Swayze, Joseph Charles Hueil, поданная 9 июля 2003 г., в настоящее время патент США № 7055731.
На фиг. 42-43 представлен вариант осуществления рукоятки 6, выполненной с возможностью использования в эндокатере с механическим приводом, совместно с вариантом осуществления стержня 8 и концевого эффектора 12, как показано на фиг. 41. Следует понимать, что для механического закрывания и активации концевого эффектора 12 можно использовать рукоятку любой соответствующей конструкции. На фиг. 42-43 показано, что рукоятка 6 хирургического режуще-сшивающего инструмента 10 включает в себя пусковой механизм со сцепленной передачей 1060, обеспечивающий такие характеристики, как повышенная прочность, уменьшенный размер рукоятки, минимальное застревание и т. д.
Притяжение закрывающего спускового механизма 18 к пистолетной рукоятке 26 рукоятки 6 инициирует закрытие концевого эффектора 12 (не показан на фиг. 42-43). Закрывающий спусковой механизм 18 поворачивается вокруг шарнирного штифта закрытия 252, соединенного с правой и левой деталями внешней нижней стороны 59 и 60 рукоятки 6, благодаря чему верхняя часть 1094 закрывающего спускового механизма 18 перемещается вперед. Закрывающее движение передается на закрывающую трубку 1005 через закрывающую вилку сцепления 250, которая соединена с закрывающим соединительным элементом 1042 и верхней частью 1094 закрывающего спускового механизма 18 соответственно при помощи штифта закрывающей вилки сцепления 1044 и штифта закрывающего соединительного элемента 1046.
В полностью открытом положении, как показано на фиг. 42, верхняя часть 1094 закрывающего спускового механизма 18 контактирует с запорным рычагом 1048 шарнирной пусковой кнопки закрытия 30 и удерживает его в показанном положении. Когда закрывающий спусковой механизм 18 оказывается в полностью нажатом положении, закрывающий спусковой механизм 18 освобождает запорный рычаг 1048, и прилегающая поверхность 1050 поворачивается в зацепление с дистальным углублением 1052 справа от поворотного запорного рычага 1048, удерживая закрывающий спусковой механизм 18 в зафиксированном, или закрытом, положении. Проксимальный конец запорного рычага 1048 поворачивается вокруг бокового шарнирного соединения 1054 с деталями 59 и 60, высвобождая пусковую кнопку закрытия 30. Промежуточная дистальная сторона 1056 пусковой кнопки закрытия 30 прижимается проксимально под действием пружины сжатия 1058, зажатой между структурой корпуса 1040 и пусковой кнопкой закрытия 30. В результате этого пусковая кнопка закрытия 30 воздействует на запорный рычаг 1048, смещая его против часовой стрелки (если смотреть слева) в блокирующий контакт с прилегающей поверхностью 1050 закрывающего спускового механизма 18, что, в свою очередь, препятствует освобождению закрывающего спускового механизма 18, когда пусковой механизм со сцепленной передачей 1040 находится в выдвинутом положении.
Когда закрывающий спусковой механизм 18 находится во втянутом и полностью нажатом положении, пусковой крючок 20 разблокируется и в данном варианте осуществления может многократно прижиматься к пистолетной рукоятке 26, приводя в действие концевой эффектор 12. Как показано на фигуре, пусковой механизм со сцепленной передачей 1060 исходно находится во втянутом положении, в котором он удерживается при помощи комбинированной пружины натяжения/сжатия 1062, сжимаемой пистолетной рукояткой 26 рукоятки 6, неподвижный конец 1063 которой соединен с деталями 59 и 60, а ее подвижный конец 1064 соединен с загнутым вниз проксимальным втянутым концом 1067 стальной ленты 1066.
Дистально расположенный конец 1068 стальной ленты 1066 прикреплен к шарнирной муфте 1070, несущей конструкционную нагрузку, которая в свою очередь прикреплена к переднему соединительному элементу 1072а из множества соединительных элементов 1072a-1072d, образующих соединительную рейку 1074. Соединительная рейка 1074 является гибкой, однако имеет дистальные соединительные элементы, образующие узел прямой жесткой рейки, который может передавать значительное пусковое усилие через пусковой шток 1010 в стержне 6, а также втягиваться в пистолетную рукоятку 26 для уменьшения продольной длины рукоятки 6. Следует понимать, что наличие комбинированной пружины натяжения/сжатия 1062 по сравнению с одиночной пружиной позволяет усилить пусковое движение и при этом по существу вдвое сократить минимальную длину.
Пусковой крючок 20 поворачивается вокруг штифта пускового крючка 96, соединенного с деталями рукоятки 59 и 60. По мере того как пусковой крючок 20 прижимается к пистолетной рукоятке 26, растягивая проксимально расположенную пружину натяжения пускового крючка 222, проксимально соединенную между верхней частью 228 пускового крючка 20 и деталями 59 и 60, верхняя часть 228 пускового крючка 20 перемещается дистально вокруг штифта пускового крючка 96. Верхняя часть 228 пускового крючка 20 зацепляет соединительную рейку 1074 во время каждого нажатия на пусковой крючок при помощи тягового смещающего механизма 1078, который расцепляется при отпускании пускового крючка 20. Пружина натяжения пускового крючка 222 при отпускании толкает пусковой крючок 20 дистально и расцепляет тяговый смещающий механизм 1078.
При активации пускового механизма со сцепленной передачей 1040 промежуточное зубчатое колесо 1080 поворачивается по часовой стрелке (если смотреть слева), зацепляя зубчатую верхнюю поверхность 1082 соединительной рейки 1074. Это вращение сообщается механизму передачи к индикатору 1084, который таким образом поворачивается против часовой стрелки в ответ на движение промежуточного зубчатого колеса 1080. Как промежуточное зубчатое колесо 1080, так и механизм передачи к индикатору 1084 соединены с возможностью вращения с деталями 59 и 60 рукоятки 6. Передаточное отношение между соединительной рейкой 1074, промежуточным зубчатым колесом 1080 и механизмом передачи к индикатору 1084 может быть преимущественно выбрано таким образом, чтобы при соответствующем размере зубьев зубчатой верхней поверхности 1082 механизм передачи к индикатору 1084 совершал не более одного оборота во время полного пускового движения пускового механизма со сцепленной передачей 1060.
Механизм передачи к индикатору 1084 выполняет по меньшей мере четыре функции, каждая из которых подробно рассмотрена ниже. Во-первых, когда соединительная рейка 1074 полностью втянута, а оба спусковых механизма 18 и 20 находятся в открытом положении, как показано на фиг. 42, отверстие 1086 в круговом гребне 1088 с левой стороны механизма передачи к индикатору 1084 приведено к верхней поверхности 1090 запорного рычага 1048. Запорный рычаг 1048 смещается в отверстие 1086 при контакте с закрывающим спусковым механизмом 18, который, в свою очередь, переводится в открытое положение под действием пружины натяжения 1092 закрывающего спускового механизма. Пружина натяжения 1092 закрывающего спускового механизма проксимально соединена с верхней частью 1094 закрывающего спускового механизма 18 и деталями рукоятки 59 и 60 и, таким образом, получает энергию, аккумулированную во время закрывания закрывающего спускового механизма 18. Энергия толкает закрывающий спусковой механизм 18 дистально в открытое положение.
Вторая функция механизма передачи к индикатору 1084 состоит в том, что он сообщается с роликом индикации втягивания 1096, размещенным снаружи на рукоятке 6. Таким образом, механизм передачи к индикатору 1084 сообщает относительное положение пускового механизма 1060 ролику индикации втягивания 1096, благодаря чему хирург получает визуальную информацию о количестве ходов пускового крючка 20, которая необходима для завершения манипуляции.
Третья функция механизма передачи к индикатору 1084 состоит в продольном и угловом перемещении пускового рычага с блокировкой обратного хода 1098 механизма блокировки обратного хода (механизм одностороннего вращения) 1097 во время работы хирургического режуще-сшивающего инструмента 10. Во время работы проксимальное перемещение пускового рычага с блокировкой обратного хода 1098 с помощью механизма передачи к индикатору 1084 активирует механизм блокировки обратного хода 1097, который обеспечивает дистальное перемещение пускового стержня 1010 и препятствует проксимальному движению пускового стержня 1010. В результате этого движения пусковая кнопка блокировки обратного хода 1100 выдвигается из проксимального конца деталей рукоятки 59 и 60, и оператор может воспользоваться кнопкой, если во время рабочего хода необходимо втянуть пусковой механизм со сцепленной передачей 1060. По завершении работы механизм передачи к индикатору 1084 изменяет направление вращения по мере притягивания пускового механизма 1060. Вращение в обратном направлении приводит к деактивации механизма блокировки обратного хода 1097, инициирует втягивание пусковой кнопки блокировки обратного хода 1100 в рукоятку 6 и поворачивает пусковой рычаг с блокировкой обратного хода 1098 латерально вправо, позволяя механизму передачи к индикатору 1084 непрерывно вращаться в обратном направлении.
Четвертая функция механизма передачи к индикатору 1084 состоит в том, что он получает момент от вращения ролика индикации втягивания 1096 вручную (по часовой стрелке, как показано на фиг. 42) для втягивания пускового механизма 1060 с разблокированным механизмом блокировки обратного хода 1097. Это позволяет преодолеть застревание пускового механизма 1060, которое нельзя преодолеть при помощи комбинированной пружины натяжения/сжатия 1062. Такое ручное втягивание можно применять после частичной активации пускового механизма 1060, в противном случае срабатывает механизм блокировки обратного хода 1097, который отодвигает кнопку блокировки обратного хода 1100 так, что она не может перемещать пусковой рычаг с блокировкой обратного хода 1098 в сторону.
Как показано на фиг. 42-43, механизм блокировки обратного хода 1097 состоит из доступного для оператора пускового рычага с блокировкой обратного хода 1098, проксимальный конец которого функционально соединен с пусковой кнопкой блокировки обратного хода 1100, а дистальный конец соединен с вилкой блокировки обратного хода 1102. Более конкретно дистальный конец 1099 пускового рычага с блокировкой обратного хода 1098 зацепляет вилку блокировки обратного хода 1102 при помощи штифта для вилки блокировки обратного хода 1104. Вилка блокировки обратного хода 1102 перемещается продольно для сообщения вращения гильзе с криволинейным пазом для блокировки обратного хода 1106, которая фиксируется продольно с помощью деталей рукоятки 59 и 90 и дистально охватывает пусковой шток 1010 относительно места соединения пускового штока 1010 и шарнирной муфты 1070 соединительной рейки 1074. Вилка блокировки обратного хода 1102 сообщает продольное движение от пускового рычага с блокировкой обратного хода 1098 к гильзе с криволинейным пазом для блокировки обратного хода 1106 через штифт гильзы с криволинейным пазом 1108. Таким образом, продольное перемещение штифта гильзы с криволинейным пазом 1108 в скошенном пазу гильзы с криволинейным пазом для блокировки обратного хода 1106 приводит к вращению гильзы с криволинейным пазом для блокировки обратного хода 1106.
Между проксимальным концом рамы 1016 и гильзой с криволинейным пазом для блокировки обратного хода 1106 зажаты, соответственно, пружина сжатия механизма блокировки обратного хода 1110, пластина механизма блокировки обратного хода 1112 и криволинейная гильза для блокировки обратного хода 1114. Как показано на фигуре, проксимальное перемещение пускового штока 1010 заставляет пластину механизма блокировки обратного хода 1112 повернуться верхней частью назад, что обеспечивает более плотный фрикционный контакт с пусковым штоком 1010 и препятствует дальнейшему проксимальному перемещению пускового штока 1010.
Поворот пластины механизма блокировки обратного хода 1112 осуществляется аналогично повороту фиксатора дверцы решетки, который удерживает дверцу решетки в открытом положении, когда гильза с криволинейным пазом для блокировки обратного хода 1106 подходит близко к криволинейной гильзе для блокировки обратного хода 1114. Более конкретно пружина сжатия механизма блокировки обратного хода 1110 может воздействовать на верхнюю поверхность пластины 1112 для переворота пластины механизма блокировки обратного хода 1112 в ее закрытое положение. Вращение гильзы с криволинейным пазом для блокировки обратного хода 1106 инициирует дистальное криволинейное перемещение гильзы механизма блокировки обратного хода 1114, в результате чего верхняя часть пластины механизма блокировки обратного хода 1112 прижимается дистально, преодолевая силу воздействия пружины сжатия механизма блокировки обратного хода 1110, тем самым переводя пластину механизма блокировки обратного хода 1112 в перпендикулярное, разблокированное положение, способствующее проксимальному втягиванию пускового штока 1010.
Как показано на фиг. 43, тяговый смещающий механизм 1078 включает в себя предохранитель 1116, имеющий дистально выступающий узкий кончик 1118 и выступающий вправо боковой штифт 1120 на проксимальном конце предохранителя, который вставлен с возможностью поворота в отверстие 1076 в верхней части 230 пускового крючка 20. С правой стороны пускового крючка 20 боковой штифт 1120 принимает смещающий элемент, представленный в виде смещающего колеса 1122. По мере того как пусковой крючок 20 перемещается вперед и назад, смещающее колесо 1122 проходит по дуге проксимально правой половине детали 59 рукоятки 6, в дистальной части выходя за пределы смещающей наклонной поверхности 1124, выполненной заодно с правой половиной детали 59. Смещающее колесо 1122 преимущественно может быть выполнено из упругого фрикционного материала, который позволит осуществлять вращение против часовой стрелки (если смотреть слева) на боковом штифте 1120 предохранителя 1116, смещая таким образом дистально выступающий узкий кончик 1118 вниз на центральную наклонную дорожку 1075 ближайшего соединительного элемента 1072a-d для зацепления с соединительной рейкой 1074.
При отпускании пускового крючка 20 смещающее колесо 1122 обеспечивает тяговое смещение предохранителя 1116 в противоположном направлении, поднимая узкий кончик 1118 из центральной наклонной дорожки 1075 соединительной рейки 1074. Для обеспечения расцепления кончика 1118 в случае сильной нагрузки и почти полного дистального перемещения предохранителя 1116 правая сторона предохранителя 1116 направлена проксимально и обращена вверх к скошенной поверхности 1126 на правой стороне замыкающей вилки сцепления 250 для отсоединения узкого кончика 1118 от центральной наклонной дорожки 1075. При отпускании пускового крючка 20 в любой момент до или после завершения полного хода смещающее колесо 1122 позволяет поднимать узкий кончик 1118 из центральной наклонной дорожки 1075. Хотя на фигуре показано смещающее колесо 1122, следует понимать, что такая форма смещающего элемента или колеса 1122 представлена в иллюстративных целях и может варьироваться, а смещающий элемент может иметь любую форму, позволяющую использовать силу трения или тяги для работы концевого эффектора 12.
Различные варианты осуществления хирургического инструмента 10 оснащены средствами регистрации условий работы инструмента в один или более моментов времени. На фиг. 44 представлена блок-схема системы 2000 регистрации параметров работы инструмента 10. Следует понимать, что такая система 2000 может быть реализована в вариантах осуществления инструмента 10, оснащенных электроприводом, например, в вариантах осуществления, описанных выше со ссылками на фиг. 1-40, а также в вариантах осуществления инструмента 10 с механическим приводом, например, в вариантах осуществления, описанных выше со ссылками на фиг. 41-43.
Система 2000 может включать в себя различные датчики 2002, 2004, 2006, 2008, 136a и 136b для регистрации параметров работы инструмента. Датчики могут быть установлены, например, на инструменте 10 или внутри него. В различных вариантах осуществления датчики могут представлять собой специализированные датчики, которые только выдают сигнал для системы 2000, или могут представлять собой датчики двойного назначения, которые выполняют другие функции в инструменте 10. Например, описанные выше датчики 110, 130 и 142 могут быть выполнены с возможностью также передавать данные в систему 2000.
Каждый датчик напрямую или опосредованно передает сигнал в запоминающее устройство 2001, которое регистрирует сигналы, как подробно описано ниже. В качестве запоминающего устройства 2001 можно использовать любое устройство с возможностью хранения или регистрации сигналов датчиков. Например, в качестве запоминающего устройства 2001 можно использовать микропроцессор, электрически программируемое ПЗУ (EEPROM) или любое другое соответствующее устройство хранения данных. Запоминающее устройство 2001 может регистрировать сигналы датчиков любым соответствующим способом. Например, в одном варианте осуществления запоминающее устройство 2001 может регистрировать сигнал, поступающий от конкретного датчика, при изменении состояния сигнала. В другом варианте осуществления запоминающее устройство 2001 может регистрировать состояние системы 2000, например, сигналы всех датчиков, входящих в состав системы 2000, при изменении состояния сигнала, поступающего от любого датчика. Таким образом, возможно выполнение моментального снимка состояния инструмента 10. В различных вариантах осуществления запоминающее устройство 2001 и/или датчики могут использовать продукты с использованием однопроводной шины 1-WIRE производства компании DALLAS SEMICONDUCTOR, например, 1-WIRE EEPROM.
В различных вариантах осуществления запоминающее устройство 2001 имеет внешний доступ, что позволяет использовать внешнее устройство, например компьютер, для доступа к параметрам работы инструмента, хранящимся в запоминающем устройстве 2001. Например, запоминающее устройство 2001 может иметь порт передачи данных 2020. Порт передачи данных 2020 обеспечивает передачу сохраненных параметров работы инструмента в соответствии с любым протоколом проводной или беспроводной связи, например, в последовательном или параллельном формате. В дополнение или вместо внешнего порта 2020 запоминающее устройство 2001 также может включать в себя сменный носитель 2021. В качестве сменного носителя 2021 можно использовать любое соответствующее устройство хранения данных, которое может быть извлечено из инструмента 10. Например, сменный носитель 2021 может включать в себя любой соответствующий вид флэш-памяти, такой как карта Международной ассоциации производителей карт памяти для персональных компьютеров (PCMCIA), карта COMPACTFLASH, карта MULTIMEDIA, карта FLASHMEDIA и т. д. Сменный носитель 2021 может также включать в себя любой соответствующий вид хранения данных на диске, например портативный жесткий диск, компакт-диск (CD), цифровой видеодиск (DVD) и т. д.
Датчик закрывающего спускового механизма 2002 воспринимает состояние закрывающего спускового механизма 18. На фиг. 45 и 46 представлен пример осуществления датчика закрывающего спускового механизма 2002. На фиг. 45 и 46 датчик закрывающего спускового механизма 2002 размещен между закрывающим спусковым механизмом 18 и шарнирным штифтом закрытия 252. Следует понимать, что во время прижимания закрывающего спускового механизма 18 к пистолетной рукоятке 26 закрывающий спусковой механизм 18 воздействует с определенным усилием на шарнирный штифт закрытия 252. Датчик 2002 может регистрировать данное усилие и в ответ на него генерировать сигнал, например, как описано выше в отношении датчика 110 и показано на фиг. 10A и 10B. В различных вариантах осуществления в качестве датчика закрывающего спускового механизма 2002 можно использовать цифровой датчик, который показывает только, активирован ли закрывающий спусковой механизм 18 или нет. В других различных вариантах осуществления в качестве датчика закрывающего спускового механизма 2002 можно использовать аналоговый датчик, который показывает усилие, воздействующее на закрывающий спусковой механизм 18, и/или положение закрывающего спускового механизма 18. Если в качестве датчика закрывающего спускового механизма 2002 используется аналоговый датчик, между датчиком 2002 и запоминающим устройством 2001 можно логически разместить аналого-цифровой преобразователь. Также следует понимать, что датчик закрывающего спускового механизма 2002 может быть выполнен в любой допустимой для этих целей форме и может быть размещен в любом допустимом месте, позволяющем регистрировать параметры работы закрывающего спускового механизма.
Датчик закрытия упора 2004 может воспринимать закрытие упора 24. На фиг. 47 представлен пример датчика закрытия упора 2004. Датчик 2004 установлен рядом или внутри серповидных отверстий 1006 канала для скоб 22, как показано на фигуре. При закрытии упора 24 шарнирные штифты упора 25 проскальзывают через серповидные отверстия 1006 и входят в контакт с датчиком 2004, заставляя датчик 2004 генерировать сигнал о том, что упор 24 находится в закрытом положении. В качестве датчика 2004 можно использовать цифровой или аналоговый датчик любого соответствующего типа, в том числе датчик приближения и т. д. Следует понимать, что если в качестве датчика закрытия упора 2004 используется аналоговый датчик, между датчиком 2004 и запоминающим устройством 2001 можно логически разместить аналого-цифровой преобразователь.
Как показано на фигуре, тензодатчик закрытия упора 2006 размещается на внутренней нижней поверхности канала для скоб 22. На практике датчик 2006 может контактировать с нижней стороной кассеты со скобами 34 (не показана на фиг. 46). При закрытии упор 24 воздействует на кассету со скобами 34 с определенным усилием, которое передается датчику 2006. В ответ на это датчик 2006 генерирует сигнал. Сигнал может быть аналоговым и пропорциональным усилию, с которым кассета со скобами 34 воздействует на датчик 2006 при закрытии упора 24. Как показано на фиг. 44, аналоговый сигнал подается в аналого-цифровой преобразователь 2014, который в свою очередь перед подачей сигнала в запоминающее устройство 2001 преобразует его из аналоговой в цифровую форму. Следует понимать, что варианты осуществления, в которых в качестве датчика 2006 используется цифровой или двоичный датчик, могут не предусматривать в своем составе аналого-цифрового преобразователя 2014.
Датчик пускового крючка 110 воспринимает положение и/или состояние пускового крючка 20. В вариантах осуществления инструмента с электроприводом датчик пускового крючка может попутно функционировать в качестве датчика запуска электродвигателя 110, описанного выше. Кроме того, датчик пускового крючка 110 может быть выполнен в любой из описанных выше форм и может быть цифровым или аналоговым. На фиг. 45 и 46 представлен дополнительный вариант осуществления датчика пускового крючка 110. На фиг. 45 и 46 датчик пускового крючка размещен между пусковым крючком 20 и шарнирным штифтом пускового крючка 96. При нажатии пусковой крючок 20 воздействует на шарнирный штифт пускового крючка 96 с определенным усилием, регистрируемым датчиком 110. Как показано на фиг. 44, в таких вариантах осуществления, в которых передача данных датчиком пускового крючка 110 осуществляется в аналоговой форме, между датчиком пускового крючка 110 и запоминающим устройством 2001 логически установлен аналого-цифровой преобразователь 2016.
Датчик положения скальпеля 2008 воспринимает положение скальпеля 32 или режущей поверхности 1027 в канале для скоб 22. На фиг. 47 и 48 представлены варианты осуществления датчика положения скальпеля 2008, которые могут использоваться совместно со стержнем 8 с механическим приводом и концевым эффектором 12, показанными на фиг. 41. Датчик 2008 включает в себя магнит 2009, соединенный с пусковым стержнем 1022 инструмента 10. Катушка 288a располагается вокруг пускового стержня 1022 и может быть установлена, например, вдоль продольной выемки 1014 пускового кюветообразного элемента 1012 (см. фиг. 41). По мере перемещения скальпеля 32 и режущей поверхности 1027 по каналу для скоб 22 пусковой стержень 1022 и магнит 2009 могут совершать возвратно-поступательное движение в катушке 288a. Такое движение относительно катушки создает в катушке напряжение, пропорциональное положению пускового штока внутри катушки и режущего края 1027 в канале для скоб 22. Напряжение передается в запоминающее устройство 2001, например, через аналого-цифровой преобразователь 2018.
В различных вариантах осуществления датчик положения скальпеля 2008 может быть заменен последовательностью цифровых датчиков (не показаны), размещенных в различных точках на стержне 8 или внутри него. Цифровые датчики могут воспринимать элемент пускового стержня 1022, например магнит 2009, при возвратно-поступательном движении этого элемента по стержню 8. Положение пускового стержня 1022 внутри стержня 8 и вместе с ним положение скальпеля 32 в канале для скоб 22 может приблизительно соответствовать положению последнего сработавшего цифрового датчика.
Следует понимать, что положение скальпеля также может восприниматься в вариантах осуществления инструмента 10 с вращающимся концевым эффектором 12 и стержнем 8, например, как описано выше и показано на фиг. 3-6. Датчик положения, например датчик положения 268, может быть выполнен с возможностью генерировать сигнал, пропорциональный вращению винтового стержня 36 или любого другого приводного стержня или передаточного устройства. Так как вращение стержня 36 или любого другого приводного стержня или передаточного устройства пропорционально перемещению скальпеля 32 по каналу 22, сигнал, генерируемый датчиком положения 268, также пропорционален перемещению скальпеля 32. Таким образом, данные датчика положения 268 могут передаваться в запоминающее устройство 2001.
Датчик наличия кассеты 136a воспринимает наличие кассеты со скобами 34 в канале для скоб 22. В инструментах с электроприводом датчик наличия кассеты 136a также может функционировать в качестве датчика блокировки кассеты 136, описанного выше и показанного на фиг. 11. На фиг. 50A и 50B представлен вариант осуществления датчика наличия кассеты 136a. В представленном варианте осуществления датчик наличия кассеты 136a включает в себя два контакта - 288a и 288b. В случае отсутствия кассеты 34 контакты 288a и 288b образуют разомкнутую цепь. При наличии кассеты 34 лоток 290 кассеты со скобами 34 взаимодействует с контактами 288a и 288b, образуя замкнутую цепь. При разомкнутой цепи датчик 136a может передавать логический ноль. При замкнутой цепи датчик 136a может передавать логическую единицу. Выходные сигналы датчика 136a передаются в запоминающее устройство 2001, как показано на фиг. 44.
Датчик состояния кассеты 136b может сигнализировать о расходе скоб в кассете 34, вставленной в канал для скоб 22. При продвижении по концевому эффектору 12 скальпель 32 толкает салазки 33, которые активируют кассету со скобами. Затем скальпель 32 возвращается в исходное положение, оставляя салазки 33 на дистальном конце кассеты. Без направляющих салазок 33 скальпель 32 может попадать в блокировочное углубление 2022. Датчик 136b может воспринимать наличие скальпеля 32 в блокировочном углублении 2022, что косвенно свидетельствует о недостатке скоб в кассете 34. Следует понимать, что в различных вариантах осуществления датчик 136b может прямо определять наличие салазок на проксимальном конце кассеты 34, тем самым устраняя необходимость попадания скальпеля 32 в блокировочное углубление 2022.
На фиг. 52A и 52B представлена последовательность операций 2200 для вариантов осуществления хирургического инструмента 10, используемого в качестве эндокатера с возможностью регистрации параметров работы инструмента в соответствии с различными вариантами осуществления. Как показано в блоке 2202, упор 24 инструмента 10 может быть закрыт. Это приводит к изменению состояния датчика закрывающего спускового механизма 2002 и/или датчика закрытия упора 2006. В ответ запоминающее устройство 2001 может регистрировать состояние всех датчиков в системе 2000, как показано в блоке 2203. Как показано в блоке 2204, инструмент 10 может быть введен в организм пациента. После введения инструмента в организм пациента упор 24 может быть открыт и закрыт, как показано в блоке 2206, например, для выполнения манипуляций с тканью в операционном поле. Каждое открытие и закрытие упора 24 вызывает изменение состояния датчика закрывающего спускового механизма 2002 и/или датчика закрытия упора 2004. В ответ запоминающее устройство 2001 регистрирует состояние системы 2000, как показано в блоке 2205.
Как показано в блоке 2208, ткань фиксируется для последующего рассечения и сшивания скобами. Если упор 24 не закрыт на стадии блока принятия решений 2210, требуется дальнейшая фиксация. Если упор 24 закрыт, то датчики 2002, 2004 и/или 2006 могут изменить состояние, заставляя запоминающее устройство 2001 регистрировать состояние системы, как показано в блоке 2213. Регистрация данных может включать в себя регистрацию данных давления при закрытии, полученных от датчика 2006. Как показано в блоке 2212, далее может выполняться рассечение и сшивание скобами. Датчик пускового крючка 110 может изменить состояние по мере натяжения пускового крючка 20 в направлении пистолетной рукоятки 26. Кроме того, при перемещении скальпеля 32 по каналу для скоб 22 датчик положения скальпеля 2008 изменяет состояние. В ответ запоминающее устройство 2001 может регистрировать состояние системы 2000 в соответствии с блоком 288b.
По завершении операции рассечения и сшивания скобами скальпель 32 возвращается в исходное положение. Вследствие активации кассеты 34 скальпель 32 может попасть в блокировочное углубление 2022, в результате чего изменяется состояние датчика состояния кассеты 136b, заставляя запоминающее устройство 2001 регистрировать состояние системы 2000, как показано в блоке 2015. После этого упор 24 может быть раскрыт, освобождая ткань. Данное действие может вызвать изменения состояния одного или более из датчика закрывающего спускового механизма 2002, датчика закрытия упора 2004 и тензодатчика закрытия упора 2006, в результате чего происходит регистрация состояния системы 2000, как показано в блоке 2017. После освобождения ткани упор 24 снова может быть закрыт, как показано в блоке 2220. Это вызывает другое изменение состояния у по меньшей мере датчиков 2002 и 2004, что, в свою очередь, заставляет запоминающее устройство 2001 регистрировать состояние системы, как показано в блоке 2019. Затем инструмент 10 может быть извлечен из организма пациента, как показано в блоке 2222.
Если во время операции возникает необходимость повторного использования инструмента 10, как показано в блоке 2224, можно открыть упор, инициируя следующую регистрацию состояния системы, как показано в блоке 2223. Использованная кассета 34 может быть извлечена из концевого эффектора 12, как показано в блоке 2226. Это вызывает изменение состояния датчика наличия кассеты 136a, что, в свою очередь, инициирует регистрацию состояния системы, как показано в блоке 2225. В соответствии с блоком 2228 можно вставить другую кассету 34. Это вызовет изменение состояния датчика наличия кассеты 136a, что, в свою очередь, инициирует регистрацию состояния системы, как показано в блоке 2227. Если другая кассета 34 является новой, то, согласно блоку принятия решений 2230, ее установка также может вызвать изменение состояния датчика состояния кассеты 136b. В таком случае может регистрироваться состояние системы, как показано в блоке 2231.
На фиг. 53 представлен пример карты распределения памяти 2300 запоминающего устройства 2001 в соответствии с различными вариантами осуществления. Карта распределения памяти 2300 включает в себя ряды столбцов 2302, 2304, 2306, 2308, 2310, 2312, 2314, 2316 и строк (не обозначены). В столбце 2302 указан номер события для каждой строки. В других столбцах представлены выходные данные одного из датчиков системы 2000. Данные от всех датчиков, сохраненные в определенный момент времени, могут быть записаны в одной строке под одним и тем же номером события. Таким образом, каждая строка отражает событие, в котором зарегистрированы один или более сигналов датчиков системы 2000.
В столбце 2304 приведены данные нагрузки закрытия, зарегистрированные при каждом событии. Они могут отражать выходные данные тензодатчика закрытия упора 2006. В столбце 2306 отражено положение рабочего хода. Эти данные могут быть получены от датчика положения скальпеля 2008. Например, полное перемещение скальпеля 32 можно разделить на отдельные части. Представленное в столбце 2306 число может соответствовать той части, в которой в настоящий момент находится скальпель 32. Нагрузка при рабочем ходе представлена в столбце 2308. Эти данные могут быть получены от датчика пускового крючка 110. Положение скальпеля представлено в столбце 2310. Данные о положении скальпеля могут быть получены от датчика положения скальпеля 2008, как и данные по рабочему ходу. В столбце 2312 представлены данные о том, в каком положении находится упор 24 - открытом или закрытом. Эти данные могут быть получены на основе выходных сигналов датчика закрытия упора 2004 и/или тензодатчика закрытия упора 2006. Данные о наличии салазок 33 или состоянии кассеты 34 могут быть приведены в столбце 2314. Эти данные могут быть получены от датчика состояния кассеты 136b. Наконец, данные о наличии кассеты 34 могут быть представлены в столбце 2316. Эти данные могут быть получены от датчика наличия кассеты 136a. Следует понимать, что в запоминающем устройстве 2001 могут храниться и другие данные, отличные от тех, которые были использованы в примере, например данные о начале и конце рабочего хода, например полученные на основе сигналов датчиков 130 и 142.
Как указано выше, во время работы сшивающего инструмента по существу должны быть выполнены несколько шагов в установленном порядке. Например, после фиксации закрывающего спускового механизма можно начинать рабочий цикл. После полного выдвижения скальпеля следующей последовательной стадией является втягивание системы. При использовании дополнительного источника создаваемого усилия, помимо пользователя (т. е. аккумуляторных батарей или пневматики) система, как описано выше, способна самостоятельно выполнять шаги, инициированные пользователем, и тем самым снижать степень сложности устройства.
Однако желательно, чтобы у пользователя была возможность интуитивно задержать, замедлить или остановить эти в остальном «автоматические» действия. Например, такая же кнопка активации, которая позволила бы начать работу в устройстве с тактильной обратной связью, таком как устройства, описанные в заявке на патент США № 11/344035, в настоящий момент патент США № 7422139, полное описание которого включено в настоящий документ путем ссылки, может применяться для замедления или остановки системы автоматического возврата при нажатии пользователем кнопки во время втягивания.
Например, на фиг. 54 и 55 представлен другой вариант осуществления настоящего изобретения, включающий в себя вариант осуществления инструмента 3010, в котором спусковой механизм втягивания 3121 закреплен на пусковом крючке 3020 (аналогичном пусковому крючку 20, описанному выше) и перемещается вместе с ним. Более конкретно спусковой механизм втягивания 3121 поддерживается с возможностью поворота на штифте пускового крючка 96 и выступает через паз (не показан) в пусковом крючке 3020. Между соединительной частью 3123 пускового крючка 3020 и монтажной частью 3127 спускового механизма втягивания 3121 прикреплена пружина 3125 для смещения спускового механизма втягивания 3121 в неактивированное положение. Второй нормально замкнутый переключатель втягивания 3131 установлен внутри рукоятки и ориентирован таким образом, чтобы при перемещении пускового крючка 3020 между полностью активированным положением и полностью неактивированным положением активирующая часть 3129 спускового механизма втягивания 3121 не активировала переключатель втягивания 3131. Тем не менее, монтажная часть 3127 и активирующая часть 3129 спускового механизма втягивания 3121 выполнены таким образом, что активирующая часть 3129 может быть приведена к активирующему контакту с переключателем втягивания 3131 путем прижатия спускового механизма втягивания 3121 к пусковому крючку 3020 независимо от того, где находится пусковой крючок 3020 во время процесса втягивания.
Вариант осуществления, показанный на фиг. 54-55, может также включать в себя различные компоненты, которые функционируют способом, подобным тому, что описан выше, например, как показано на фиг. 10. Например, датчик обратного действия или датчик окончания хода 3130 и датчик остановки электродвигателя или датчик начала хода 3142 могут функционировать подобно соответствующим датчикам 130, 142, описанным выше. Механические компоненты 3122, 3078, 3072, 3070, 3068, 3074, 3090 могут функционировать подобно соответствующим механическим компонентам 122, 78, 72, 68, 74, 90. Электродвигатель 3065 может функционировать подобно электродвигателю 65. Также основной приводной стержень 3048 может функционировать подобно основному приводному стержню 48, описанному выше. Например, основной приводной стержень 3048 может вызывать активацию концевого эффектора 12, включая, например, активацию скальпеля 32 и салазок 33.
Как описано выше, когда концевой эффектор 12 достигает конца хода, активируется переключатель окончания хода 3130. Как показано в примере на фиг. 55, переключатель втягивания 3131 соединен последовательно с переключателем окончания хода 3130. Так как переключатель втягивания 3131 в обычном состоянии замкнут, то катушка 3134 реле 3132 будет находиться под напряжением, когда оба переключателя 3130, 3131 будут замкнуты. Это приводит к тому, что реле 3132 переходит в возбужденное состояние, при этом ток обходит датчик блокировки кассеты 3136 и резистор переменного сопротивления 3110. Ток протекает к двухполюсному двухпозиционному реле 3140 и к электродвигателю 3065, но так, что это заставляет электродвигатель 3065 изменить направление вращения. Поскольку переключатель начала хода 3142 замкнут, ток потечет обратно к реле 3132, обеспечивая его замыкание до тех пор, пока не разомкнется переключатель 3142. Когда скальпель 32 находится в полностью втянутом положении, переключатель начала хода 3142 размыкается, прекращая тем самым подачу питания на электродвигатель 3065. Однако, если пользователь хочет замедлить процесс втягивания, он может прижать спусковой механизм втягивания 3121 для активации резистора переменного сопротивления 3133 переключателя втягивания 3131. Когда спусковой механизм втягивания 3121 не прижат, резистор переменного сопротивления 3133 имеет минимальное сопротивление. При нажатии спускового механизма 3121 сопротивление резистора переменного сопротивления 3133 увеличивается пропорционально силе прижатия спускового механизма втягивания 3121 и снижает величину протекающего через электродвигатель 3065 тока. Дальнейшее нажатие спускового механизма втягивания 3121 будет замедлять процесс втягивания до тех пор, пока нормально замкнутая контактная часть 3135 переключателя втягивания 3131 не разомкнется и не остановит протекание тока к электродвигателю 3065. В различных вариантах осуществления после высвобождения пользователем спускового механизма втягивания 3121 пружина 3125 перемещает спусковой механизм втягивания 3121 в неактивное положение, и контактная часть 3135 переключателя 3131 возвращается в свое нормально замкнутое положение, тем самым снова позволяя току проходить к электродвигателю 3065 для завершения процесса втягивания.
Уникальные и новаторские элементы переключателя втягивания и схемы расположения спускового механизма втягивания, описанные выше, могут также использоваться в связи с различными вариантами осуществления, описанными в заявке на патент США № US 2010/0076474 A1, в настоящий момент патент США № 8210411, и патенте США № 7422139, которые оба полностью включены в настоящий документ путем ссылки. Например, на фиг. 56 показан другой вариант осуществления цепи управления током в соответствии с настоящим изобретением. Когда (i) переключатель запуска электродвигателя 3110 замкнут (на фиг. 56 он показан в разомкнутом состоянии), (ii) аварийный выключатель 3240 замкнут (на фиг. 56 он показан в разомкнутом состоянии), показывая, что включен предохранитель устройства, и (iii) нормально замкнутый блокировочный переключатель 3242 разомкнут, показывая, что инструмент не заблокирован, ток проходит через аварийный выключатель 3240 и индикатор блокировки 3244 (который, как показано на фиг. 56, может представлять собой светодиод) к электродвигателю 3065. При окончании рабочего хода переключатель окончания рабочего хода или переключатель направления хода 3130 переключается, изменяя направление вращения электродвигателя 3065 (при этом также освобождается переключатель запуска 3110). В этом состоянии ток также проходит через индикатор обратного направления 3246, такой как светодиод, который наглядно показывает, что направление вращения электродвигателя было изменено.
Как показано на фиг. 56, цепь также может включать в себя ручной переключатель возврата 3248. Оператор может вручную активировать данный переключатель, если режущий инструмент 32 прошел лишь часть рабочего хода. При нажатии на ручной переключатель возврата 3248 электродвигатель 3065 вращается в обратную сторону, в результате чего режущий инструмент 32 возвращается в исходное положение. Если пользователь желает замедлить или остановить процесс втягивания, он прижимает спусковой механизм втягивания 3121 для активации резистора переменного сопротивления 3133 переключателя втягивания 3131. При нажатии спускового механизма 3121 сопротивление резистора увеличивается пропорционально силе прижатия и снижает величину протекающего через электродвигатель 3065 тока. Дальнейшее нажатие спускового механизма втягивания 3121 будет замедлять процесс втягивания до тех пор, пока нормально замкнутая контактная часть 3135 переключателя втягивания 3131 не разомкнется и не остановит протекание тока к электродвигателю 3065. В различных вариантах осуществления после высвобождения пользователем спускового механизма втягивания 3121 пружина 3125 перемещает спусковой механизм втягивания 3121 в неактивное положение, и контактная часть 3135 переключателя 3131 возвращается в свое нормально замкнутое положение, тем самым снова позволяя току проходить к электродвигателю 3065 для завершения процесса втягивания.
Дополнительные конфигурации хирургических инструментов с электроприводом раскрыты в публикации заявки на патент США № US 2010/0076474 A1 под названием «Хирургический режущий инструмент с электроприводом», в настоящее время патент США № 8210411, которая полностью включена в настоящий документ путем ссылки. Например, на фиг. 57 изображена принципиальная схема другой цепи управления током в соответствии с различными вариантами осуществления настоящего изобретения. В различных вариантах осуществления цепь управления электродвигателем может включать в себя одну или более интегральных схем (ИС), таких как, например, схемы процессора, памяти, микроконтроллера, таймера и т. д. В других вариантах осуществления цепь управления электродвигателем может не содержать никаких ИС. Такая цепь управления током без ИС может быть предпочтительна из-за частой сложности и высокой стоимости стерилизации хирургических инструментов, содержащих ИС.
При первоначальном приложении оператором пускового движения к пусковому крючку 3020 после блокировки закрывающего спускового механизма 18 активируется (или замыкается) переключатель запуска электродвигателя 3110, открывая путь току. Если нормально разомкнутый переключатель датчика обратного действия 3130 разомкнут (что означает, что конец хода концевого эффектора не достигнут), ток потечет через однополюсное двухпозиционное реле 3132. Когда переключатель датчика обратного действия 3130 не замкнут, катушка 3134 реле 3132 не будет находиться под напряжением, то есть реле 3132 будет находиться в невозбужденном состоянии.
Как показано на фиг. 57C, цепь может также включать в себя резистивный элемент 3144 и параллельно соединенный с ним переключатель 3146, причем параллельные элементы соединены последовательно с реле 3132. Резистивный элемент 3144 и переключатель 3146 также соединены с источником питания 3064. Переключатель 3146 может управляться цепью управления 3135, чувствительной к датчику положения режущего инструмента 3150. В соответствии с различными вариантами осуществления цепь управления 3135 может разомкнуть переключатель 3146, когда режущий инструмент 32 находится в положении, (i) очень близком к началу своего хода и (ii) очень близком к концу своего хода. Например, цепь управления может разомкнуть переключатель, когда режущий инструмент 32 находится (i) на расстоянии 0,025 мм (0,001 дюйма) от начала своего хода и (ii) на расстоянии 0,025 мм (0,001 дюйма) от конца своего хода, как определено датчиком положения режущего инструмента 3150. При разомкнутом переключателе 3142 ток проходит через резистивный элемент 3144, затем через реле 3132, реле 3138 и переключатель датчика запуска электродвигателя 3110 к электродвигателю 3065. При прохождении тока через резистивный элемент 3144 снижается величина тока, поступающего к электродвигателю 3065, тем самым снижая мощность, подводимую к электродвигателю 3065. Таким образом, когда режущий инструмент 32 находится в положении, (i) очень близком к началу своего хода или (ii) очень близком к концу своего хода, подводимая к электродвигателю 3065 мощность уменьшается. И наоборот, после того, как режущий инструмент 32 отошел достаточно далеко от начальной точки или от точки конца хода, цепь управления 3135 может замкнуть переключатель 3146, тем самым закорачивая резистивный элемент 3144, тем самым увеличивая величину тока, подаваемого к электродвигателю 3065, и увеличивая мощность, подводимую к электродвигателю.
В альтернативном варианте осуществления резистивный элемент 3144 и переключатель 3146 могут быть заменены и/или дополнены цепью широтно-импульсной модуляции 3148, как представлено на фиг. 57, 57A, 57B. Как показано на фигурах, цепь широтно-импульсной модуляции 3148 может быть включена последовательно между источником питания 3064 и электродвигателем 3065. Цепь широтно-импульсной модуляции 3148 может получать от цепи управления 3135 сигналы, вызывающие переключение цепи 3148 между разомкнутым и замкнутым состоянием. Коэффициент заполнения или длина импульса результирующего сигнала может управлять средней величиной тока, а значит и мощностью, передаваемой электродвигателю 3065. Когда режущий инструмент 32 находится в положении, близком к началу или концу своего хода, цепь широтно-импульсной модуляции 3148 может снизить длительность включения или длину импульса тока, передаваемого электродвигателю 3065, таким образом снижая подводимую к нему мощность.
В соответствии с различными вариантами осуществления цепь управления током дополнительно включает в себя переключатели датчиков блокировки 3136a-d, вместе образующие цепь блокировки 3137, через которую ток от реле 3132, когда последнее находится в невозбужденном состоянии, проходит для обеспечения работы электродвигателя 3065. Каждый переключатель датчика блокировки 3136a-d может быть выполнен с возможностью сохранения разомкнутого (т. е. непроводящего) состояния переключателя или замкнутого (т. е. проводящего) состояния переключателя, в зависимости от наличия или отсутствия соответствующего условия соответственно. Любое из соответствующих условий, при его наличии во время активации инструмента 10, может стать причиной неудовлетворительного выполнения операции рассечения и сшивания и/или повреждения инструмента 10. Условия, на которые могут реагировать переключатели датчиков блокировок 3136a-d, включают в себя, например, (а) отсутствие кассеты со скобами 34 в канале 22, (b) наличие израсходованной (например, ранее отработанной) кассеты со скобами 34 в канале 22 и (c) открытое (или в другом виде недостаточно закрытое) положение упора 24 относительно канала 22. Другие условия, на которые могут реагировать переключатели датчиков блокировок 3136a-d, например, износ компонента, можно выводить по суммарному количеству операций сшивания, произведенных инструментом 3010. Соответственно в различных вариантах осуществления при наличии любого из упомянутых условий соответствующие переключатели датчиков блокировок 3136a-d сохраняют разомкнутое состояние переключателя и тем самым предотвращают прохождение тока, необходимого для включения в работу электродвигателя 3065. В различных вариантах осуществления пропускание тока датчиками блокировки 3136a-d допускается только после устранения всех таких условий. Следует понимать, что вышеописанные условия приведены только в качестве примера, и что можно обеспечить дополнительные переключатели датчиков блокировки для реакции на другие условия, наносящие ущерб работе инструмента 3010. Аналогичным образом следует понимать, что в вариантах осуществления, в которых одно или более из вышеописанных условий может отсутствовать или не имеет значения, число переключателей датчиков блокировки может быть меньше, чем показано.
Как показано на фиг. 57, переключатель датчика блокировки 3136a может быть реализован с использованием конфигурации нормально разомкнутого переключателя, так что замкнутое состояние переключателя сохраняется, когда кассета со скобами 34 находится в положении, соответствующем ее правильному размещению в канале 22. Когда кассета со скобами 34 не установлена в канал 22 или установлена неправильно (например, с нарушением совмещения), переключатель датчика блокировки сохраняет разомкнутое состояние переключателя 3136a. Переключатель датчика блокировки 3136b может быть реализован с использованием конфигурации нормально разомкнутого переключателя, так что замкнутое состояние переключателя сохраняется только в том случае, когда в канале 22 присутствует неизрасходованная кассета со скобами 34 (т. е. кассета со скобами 34, в которой салазки 3033 находятся в неактивированном положении). Наличие израсходованной кассеты со скобами 34 в канале 22 приводит к тому, что переключатель датчика блокировки 3136b поддерживает разомкнутое состояние. Переключатель датчика блокировки 3136c может быть реализован с использованием конфигурации нормально разомкнутого переключателя, так что замкнутое состояние переключателя сохраняется, когда упор 24 находится в закрытом положении относительно канала 22. Управление переключателем датчика блокировки 3136c возможно в соответствии с параметром временной задержки, при этом замкнутое состояние переключателя поддерживается только после того, как упор 24 находится в закрытом положении в течение заданного периода времени.
Переключатель датчика блокировки 3136d может быть реализован с использованием конфигурации нормально замкнутого переключателя, так что замкнутое состояние переключателя сохраняется только в том случае, когда суммарное число операций, произведенных инструментом 3010, меньше заданного числа. Переключатель датчика блокировки 3136d может быть связан со счетным устройством 3139, выполненным с возможностью ведения счета, представляющего суммарное число операций, произведенных инструментом 3010, сравнения подсчитанного числа с заданным числом и управления состоянием переключателя датчика блокировки 3136d по результатам сравнения. Следует понимать, что, хотя счетное устройство 3139 показано на фиг. 57 отдельно, оно может составлять одно целое с переключателем датчика блокировки 3136d для формирования общего устройства. В предпочтительном варианте счетное устройство 3139 реализовано в виде электронного устройства, имеющего вход для увеличения подсчитанного числа по изменению дискретного электрического сигнала, подаваемого в данное устройство. Следует понимать, что вместо вышеупомянутого варианта можно применить механический счетчик, выполненный с возможностью ведения счета на основе механического входного сигнала (например, притягивания пускового крючка 3020). При реализации в виде электронного устройства в качестве входного сигнала счетного устройства 3139 можно использовать любой присутствующий в электрической цепи дискретный сигнал, который изменяется один раз при каждой операции сшивания/рассечения. Как показано на фиг. 57, например, можно использовать дискретный электрический сигнал, генерируемый в результате активации датчика окончания хода 3130. Счетное устройство 3139 может управлять состоянием переключателя датчика блокировки 3136d таким образом, что замкнутое состояние переключателя сохраняется, когда подсчитанное число меньше заданного числа, записанного в памяти счетного устройства 3139. Когда подсчитанное число оказывается равным заданному числу, счетное устройство 3139 воздействует на переключатель датчика блокировки 3136d и сохраняет разомкнутое состояние переключателя, тем самым не допуская прохождения через него тока. Следует понимать, что по необходимости заданное число, записанное в памяти счетного устройства 3139, можно настраивать избирательно. В соответствии с различными вариантами осуществления счетное устройство 3304 может быть связано с дисплеем (не показан), например, ЖК-дисплеем, составляющим одно целое с инструментом 3010, для отображения пользователю либо подсчитанного числа, либо разности между заданным числом и подсчитанным числом.
В соответствии с различными вариантами осуществления цепь блокировки 3137 может содержать один или более индикаторов, доступных для наблюдения пользователю инструмента 3010, для отображения состояния по меньшей мере одного из переключателей датчиков блокировок 3136a-c. Более подробное описание данных индикаторов приведено в публикации заявки на патент США № 2007/0175956 под названием «Электронные блокировки и хирургический инструмент, содержащий электронные блокировки», в настоящее время патент США № 7644848, которая полностью включена в настоящий документ путем ссылки. Данная заявка также включает в себя примеры схем расположения и конфигураций для переключателей датчиков блокировки 3136a-d.
В представленном варианте осуществления, когда переключатели датчиков блокировки 3136a-d совместно сохраняют замкнутое состояние переключателя, однополюсное однопозиционное реле 3138 оказывается в возбужденном состоянии. Когда реле 3138 находится в возбужденном состоянии, ток протекает через реле 3138 и датчик переключателя запуска электродвигателя 3110 к электродвигателю 3065 через двухполюсное двухпозиционное реле 3140, таким самым питая электродвигатель 3065 и позволяя ему вращаться в прямом направлении. В соответствии с различными вариантами осуществления, поскольку выходной сигнал реле 3138 после подачи на него напряжения поддерживает реле 3138 в возбужденном состоянии, пока реле 332 находится под напряжением, то цепь блокировки 3137 не будет выполнять функцию блокировки работы электродвигателя 3165 после его включения, даже если один или более переключателей датчиков блокировок 3136a-d впоследствии сохраняют разомкнутое состояние переключателя. Однако в других вариантах осуществления может быть необходимо или, в других отношениях, желательно соединить цепь блокировки 3137 и реле 3138 так, что один или более переключателей датчиков блокировки 3136a-d должны сохранять замкнутое состояние переключателя для поддержания работы электродвигателя 3165 после его включения.
В различных вариантах осуществления вращение электродвигателя 3065 в прямом направлении заставляет кольцо перемещаться дистально и тем самым выключает переключатель датчика останова электродвигателя 3142. Так как переключатель 3142 является нормально замкнутым, электромагнит 3141, соединенный с переключателем 3142, может оказаться под напряжением. Электромагнит 3141 может быть обычным выталкивающим соленоидом, который под напряжением вызывает аксиальное выдвижение сердечника (на фигуре не показан). Выдвижение сердечника может выполнять функцию фиксации закрывающего спускового механизма 18 в отведенном назад положении, предотвращая тем самым открытие упора 24 в то время, когда выполняется операция сшивания (т. е. в то время, когда переключатель 3142 не активирован). После обесточивания электромагнита 3141 сердечник отводится назад, так что оказывается возможно ручное высвобождение закрывающего спускового механизма 18.
Когда часть исполнительного элемента достигает наиболее дистального конца своего хода, активируется переключатель обратного действия 3130, замыкая переключатель 3130 и пропуская ток к реле 3132. Это приводит к тому, что реле 3132 переходит в возбужденное состояние, при этом ток течет не через цепь блокировки 3137 и переключатель датчика запуска электродвигателя 3110, а проходит как к нормально замкнутому двухполюсному двухпозиционному реле 3140, так и к электродвигателю 3065, но через реле 3140, что заставляет электродвигатель 3065 изменить направление вращения. Поскольку переключатель датчика останова электродвигателя 3142 в обычном состоянии замкнут, то ток будет подаваться обратно к реле 3132 для поддержания его в возбужденном состоянии до тех пор, пока переключатель 3142 не будет разомкнут. Когда скальпель 32 находится в полностью втянутом положении, переключатель датчика останова электродвигателя 3142 активируется и размыкается, прекращая тем самым подачу питания на электродвигатель 3065 и снимая напряжение с электромагнита 3141.
В варианте осуществления, показанном на фиг. 57, используется нормально замкнутый переключатель втягивания 3137, который взаимодействует со спусковым механизмом втягивания 3121 (не показан на фиг. 57). При активации переключателя втягивания 3137 он размыкается и останавливает прохождение тока к электродвигателю 3065. В альтернативных вариантах осуществления (фиг. 57A) нормально замкнутый переключатель втягивания 3137 может быть заменен на резистор переменного сопротивления 3137', который взаимодействует со спусковым механизмом втягивания 3121. В таком варианте осуществления, когда спусковой механизм втягивания 3121 не нажат, сопротивление резистора переменного сопротивления минимально, что позволяет пройти к электродвигателю 3065 максимальному току. При нажатии сопротивление увеличивается пропорционально силе нажатия и снижает величину протекающего через электродвигатель тока. Такой резистор переменного сопротивления также может быть заменен на переключатель втягивания 3131, как описано выше (см. фиг. 57B).
Предотвращение самопроизвольного срабатывания механизированного эндокатера. С появлением систем усиления, которые снимают ограничения относительно функциональности устройства в соответствии с силовыми возможностями пользователя, распространенной проблемой может стать случайное начало рабочего цикла. Это может быть связано с упрощением возможности нажатия на устройство управления активацией и начала пуска инструмента с последующим срабатыванием блокировки кассеты или даже заклиниванием ее в ткани, так как пользователь не знает, что он инициировал запуск операции. Различные схемы расположения блокировки описаны в патенте США № 7644848 под названием «Электронные блокировки и хирургический инструмент, содержащий электронные блокировки», авторы Swayze et al., содержание которого полностью включено в настоящий документ путем ссылки. Для устранения данной проблемы могут использоваться дополнительные переключатели или кнопки разблокировки активатора, предназначенные для разблокирования пускового механизма. Данная система аналогична системам парных переключателей, используемых в бензомоторных пилах, а также в армейской системе защиты от самопроизвольного срабатывания. Вспомогательный переключатель может либо снимать блокировку пускового крючка, либо просто пропускать ток к устройству управления.
Как было указано выше, при использовании двухтактного инструмента с электроприводом оператор сначала притягивает и блокирует закрывающий спусковой механизм 18. На фиг. 58 и 59 показан один вариант осуществления способа блокировки закрывающего спускового механизма 18 на части пистолетной рукоятки 3026 рукоятки 3006. В показанном варианте осуществления изобретения часть пистолетной рукоятки 3026 включает в себя крючок 3150, отклоняющийся для поворота против часовой стрелки вокруг оси поворота 3151 под действием торсионной пружины 3152. Закрывающий спусковой механизм 18 также включает в себя запирающую пластину 3154. Когда оператор притягивает закрывающий спусковой механизм 18, запирающая пластина 3154 зацепляется за скошенную часть 3156 крючка 3150, поворачивая тем самым крючок 3150 вверх (или по часовой стрелке, как показано на фиг. 58 и 59) до тех пор, пока запирающая пластина 3154 полностью не пройдет скошенную часть 3156 и не встанет в утопленную выемку 3158 крючка 3150, фиксируя положение закрывающего спускового механизма 18. Оператор может разблокировать закрывающий спусковой механизм 18, сдвигая вниз скользящую пусковую кнопку 3160 на задней или противоположной стороне части пистолетной рукоятки 3026. При сдвигании скользящей пусковой кнопки 3160 вниз происходит вращение крючка 3150 по часовой стрелке так, что запирающая пластина 3154 высвобождается из утопленной выемки 3158. Другие варианты расположения для съемной блокировки закрывающего спускового механизма 18 описаны в патенте США № 7422139, который включен в настоящий документ путем ссылки.
Как показано на фиг. 58 и 59, в различных вариантах осуществления переключатель предохранителя закрытия 3151 может быть установлен в крючке 3150 таким образом, чтобы активироваться только после фиксации крючка 3150 на месте. Однако переключатель предохранителя закрытия 3151 можно устанавливать в часть пистолетной рукоятки 26 для активации закрывающего спускового механизма 18, когда закрывающий спусковой механизм 18 находится в положении блокировки. В других альтернативных вариантах осуществления переключатель предохранителя закрытия 3151 установлен на концевом эффекторе 12 таким образом, что он активируется только тогда, когда упор или другая часть, выполненная с возможностью перемещения, находится в «закрытом» положении. Независимо от конкретного места расположения переключателя предохранителя закрытия 3151, в различных вариантах осуществления переключатель предохранителя закрытия 3151 представляет собой нормально разомкнутый переключатель, который замыкается при блокировке закрывающего спускового механизма 18 или при ином приведении концевого эффектора в «закрытое» положение.
На фиг. 60 представлена схема электрической цепи инструмента 3010 в соответствии с различными вариантами осуществления настоящего изобретения, показывающая использование переключателя предохранителя закрытия 3151. Как показано на данной фигуре, пока переключатель предохранителя закрытия 3151 не замкнут, ток не проходит от аккумуляторной батареи 3064 к электродвигателю 3065 даже при наличии кассеты. Таким образом, электродвигатель 3065 не может начать работу, пока закрывающий спусковой механизм находится в закрытом блокирующем положении, что также отражает закрытое состояние концевого эффектора.
Различные варианты осуществления могут дополнительно включать в себя пусковой переключатель 3153, который должен активироваться хирургом для разрешения прохождения тока от аккумуляторной батареи 3064 к другим компонентам цепи и, в конечном итоге, к электродвигателю 3065. Пусковой переключатель 3153 находится в нормально разомкнутом состоянии и может размещаться в любом удобном месте на рукоятке 3006. См. фиг. 61. Таким образом, в данных вариантах осуществления, даже если концевой эффектор 12 содержит кассету, а закрывающий спусковой механизм 18 заблокирован в закрытом состоянии, ток не проходит к электродвигателю 3065, пока хирург не замкнет пусковой переключатель 3153. В альтернативных вариантах осуществления пусковой переключатель 3153 может содержать механический переключатель, который предотвращает физическое прижатие пускового крючка 3020 к части пистолетной рукоятки, пока переключатель 3153 не приведен в активное положение.
Активная регулировка высоты скоб для механизированного эндокатера. В течение многих лет предпринимаются попытки обеспечить возможность регулирования высоты скоб в зависимости от толщины и типа ткани. Совсем недавно в заявке на патент США № 11/231456, поданной 21 сентября 2005 г., в настоящее время патент США № 7407078, и заявке на патент США № 11/540735, поданной 29 сентября 2006 г., в настоящее время патент США № 7467740, описание которых полностью включено в настоящий документ путем ссылки, по существу приведено описание гибких соединительных элементов или опорных устройств, которые позволили бы зазору инструмента увеличиваться при нагрузках, вызванных наличием в устройстве толстой ткани. Такая пассивно изменяемая высота скоб учитывает толщину ткани, создавая скобы более крупной формы.
Введение в инструмент источника питания позволяет использовать электричество для изменения высоты внутреннего элемента в пределах динамического соединительного элемента с активным изменением высоты скоб хирургом или путем задания в инструменте желаемой высоты. Такой внутренний элемент может быть выполнен из материала с памятью формы, температура которого изменяется под действием электричества, что позволяет ему изменять пространственную высоту в зависимости от конфигурации. Следующим возможным способом может быть добавление электроактивного полимера (ЭАП), который под воздействием электрического поля может менять свою высоту и ширину. Третий вариант осуществления заключается в использовании традиционного линейного электрического элемента с шаговым приводом, который может быть приведен в движение при помощи храпового механизма небольшого регулируемого винтового элемента в соединительной штанге, регулирующей его высоту.
Более конкретно и со ссылками на фиг. 62 и 63 концевой эффектор 12 в соответствии с различными вариантами осуществления настоящего изобретения показан в поперечном сечении с упором 24 в закрытом или зафиксированном положении. Как показано на фигурах, режущий инструмент или скальпель 32 имеет нижнюю рабочую часть 37, имеющую резьбовую гильзу или резьбовую муфту 37', которая выполнена с возможностью резьбовым образом зацеплять винтовой стержень 36. Кроме того, от каждой боковой стенки резьбовой муфты 37 проходит ребро 39 для взаимодействия с соответствующими скользящими частями 3023 канала 22. Как также показано на фиг. 62, скальпель 32 имеет верхнюю рабочую часть 41, размер которой позволяет принимать его внутри продольного T-образного паза 43 в упоре 24. Как показано на фиг. 62, от каждой стороны верхней рабочей части 41 скальпеля 32 проходит пара верхних опорных штифтов 41'. Каждый верхний опорный штифт 41' выполнен с возможностью прохождения в соответствующую часть Т-образного паза 43, выполненного в упоре 24. Таким образом, когда скальпель 32 выталкивается дистально через концевой эффектор 12, ребра 39 и опорные штифты 41' служат для ограничения расстояния между упором 24 и кассетой 34 максимальной предварительно заданной величиной.
Предусмотрены различные варианты осуществления настоящего изобретения с устройством для регулировки расстояния между упором 24 и кассетой 34, вставленной в канал 22. Например, в некоторых вариантах осуществления каждое ребро 39 поддерживает контакт с салазками 3045 для скользящей связи с соответствующими электрическими контактами 47, которые установлены внутри каждой скользящей части 3023 канала 22. Электрические контакты 47 имеют удлиненную форму и проходят внутри канала 22, так что скользящие контакты 3045 всегда связаны с соответствующими им электрическими контактами 47 при прохождении скальпеля 32 внутри канала 22. Электрические контакты 47 соединены с источником питания или аккумуляторной батареей 3064 и выполнены с возможностью принимать от них ток, когда электродвигатель 3065 включается для дистального выталкивания скальпеля 32. Также в некоторых вариантах осуществления в каждый опорный штифт 41' устанавливается чувствительный к электричеству элемент регулировки высоты 49, как показано на фиг. 62. Элементы регулировки высоты 49 электрически соединены с контактами салазок 3045 для приема от них электрического тока. В различных вариантах осуществления элементы регулировки высоты 49 могут содержать материал с эффектом памяти формы, который при электризации меняет свою физическую высоту в зависимости от конфигурации. Таким образом, в зависимости от величины получаемого тока элементы регулировки высоты 49 могут расширяться и прижимать упор 24 к кассете 34, уменьшая расстояние между ними. Величина увеличения объема данного материала пропорциональна величине получаемого тока и известна. Для управления величиной расширения и, следовательно, расстояния между упором 24 и кассетой 34 можно использовать цепь управления (не показана). В других вариантах осуществления материал регулировки высоты содержит электроактивный полимер (ЭАП), который удерживается внутри углубления в штифте 41 или иным способом прикреплен к нему.
На фиг. 64 представлен другой вариант осуществления, аналогичный варианту осуществления, показанному на фиг. 62. Однако в этом варианте осуществления элементы регулировки высоты 49 устанавливаются в упор 24 и принимают ток от источника питания через напрямую присоединенные к ним проводники. Таким образом, в данном варианте осуществления контакты 43 и 3045, описанные выше, не нужны.
На фиг. 65 представлен альтернативный узел скальпеля 32', который по существу идентичен узлу скальпеля 32, описанному выше, за исключением того, что опорные штифты 41' установлены на отдельной верхней рабочей части 3302, которая выполнена с возможностью избирательного перемещения в вертикальном направлении «VD» относительно нижней части 3300 узла скальпеля 32'. В нижней части 3300 может быть установлен второй электродвигатель 3304, содержащий ходовой винт 3306, который резьбовым образом зацепляет резьбовую муфту 3308 верхней опорной части 3302. Верхняя опорная часть содержит Т-образный язычок 3310, который проходит с возможностью скольжения в паз 3312 соответствующей формы в нижней части 3300, чтобы предотвратить поворот верхней опорной части 3302 относительно нижней опорной части 3300, при этом позволяя верхней опорной части 3302 перемещаться вертикально относительно нижней части. Таким образом, расстояние между верхней и нижней опорными частями 3302, 3300 может регулироваться включением второго электродвигателя 3304. Соответственно если хирург желает уменьшить расстояние между упором 24 и кассетой 34, включается второй электродвигатель 3304 для вращения в первом направлении, чтобы притянуть верхнюю опорную часть 3302 к нижней опорной части 3300. Однако если хирург желает увеличить расстояние между упором 24 и кассетой 34, второй электродвигатель 3304 включается для вращения в противоположном направлении.
Различные варианты осуществления настоящего изобретения включают в себя способы подсветки концевого эффектора и способы подсветки хирургического поля, где применяется механизированный эндокатер. В настоящее время, когда концевой эффектор находится в рабочем или почти рабочем положении, хирургу бывает затруднительно работать в месте операции из-за теней от смежных структур, а также ввиду того, что концевой эффектор может быть полностью скрыт за какой-либо структурой. На фиг. 66 представлен общий вид дистального конца 3402 хирургического сшивающего инструмента 3400 в соответствии с различными вариантами осуществления настоящего изобретения, который включает в себя упор 3404, корпус кассеты 3406 и канал 3408. Как видно на данной фигуре, на конце корпуса кассеты 3406 может быть размещен дополнительный источник света 3410 для освещения ткани 3401. Данный источник света 3410 может представлять собой любую комбинацию практических средств превращения электрической энергии в световую, включая без ограничений полупроводник (такой как светодиод), традиционную лампу накаливания, электролюминесцентный и лазерный источник света, который может работать от аккумуляторной батареи, установленной в рукоятке инструмента, или, в других вариантах осуществления, от сети переменного тока. Такие варианты расположения позволяют хирургу не только освещать место операции, но и просвечивать структуры, чтобы увидеть внутренние компоненты, например сосудистую сетку, а также позволяют с помощью лазерной указки через традиционные оптические устройства указывать другим участникам операции на интересующие участки.
В различных вариантах осуществления на задней стороне корпуса кассеты 3406 расположены один или более контактов 3420, выполненных с возможностью зацеплять контакты 3422 внутри канала 3408. См. фиг. 67. Это позволит хирургу по мере необходимости включать освещение 3410, подавая питание к контактам с помощью переключателя, расположенного на рукоятке 3430. Такой переключатель может даже обеспечивать плавную регулировку интенсивности, как и переключатель, обеспечивающий управление скоростью работы основного устройства. Другие схемы расположения подсветки для освещения конца упора, прикрепленного к циркулярному хирургическому сшивающему инструменту, описаны в публикации заявки на патент США № US 2010/0096435 A1 под названием «Хирургический сшивающий инструмент с устройством для обеспечения обратной связи по положению упора», опубликованной 22 апреля 2010 г., в настоящее время патент США № 7918377, полное описание которого включено в настоящий документ путем ссылки.
В публикации заявки на патент США № 2007/0175949 A1 под названием «Хирургический инструмент, имеющий систему обратной связи», опубликованной 2 августа 2007 г., полное описание которой включено в настоящий документ путем ссылки, на фиг. 45-47 дополнительно представлены устройства отображения, которые могут среди прочего показывать состояние данной обратной связи по положению концевого эффектора, состояние блокировки, число запусков инструмента и т. д. Это должно упростить одну из более сложных проблем для пользователя, заключающуюся в определении состояния устройства, особенно состояния блокировки устройства, без активации устройства. Для пользователя также будет полезна дополнительная немедленная обратная связь о состоянии установленной кассеты. Как и в цитированной выше заявке, информация может выводиться на индикатор блокировки на рукоятке 3430. Индикатор 3432 (например, светодиод, лампа накаливания, ЖКД, звуковой оповещатель, вибратор и т. д.) может исключительно передавать состояние устройства или механизма блокировки кассеты, предоставляя хирургу данную информацию. Такой светодиод может быть расположен на рукоятке 3430. См. фиг. 69. Кроме того, индикатор 3434 может быть расположен вблизи дистального конца 3402, благодаря чему хирург и специалист, устанавливающий кассету, получат оперативную информацию о готовности кассеты к работе. См. фиг. 68. Это можно реализовать с помощью переключателя или набора контактов, непосредственно связанных с механической блокировкой. Переключатель или контакты замыкают цепь, при этом индикатор выводит соответствующую информацию. Данный готовый набор контактов может замыкаться через проводящий элемент, расположенный внутри салазок (часть 33 публикации заявки на патент США № 2007/0175958, в настоящее время патент США № 7766210), а два контакта могут располагаться в проксимальной части канала (часть 22). Еще одним способом обнаружения состояния блокировки является косвенный способ по состоянию инструмента (пример I: загруженная кассета без попытки активации устройства будет означать, что блокировка не включена; пример 2: активированный инструмент без установленной новой кассеты будет означать, что блокировка включена, и т. п.). Другим вариантом осуществления может быть размещение светодиода или визуального сигнала индикации на самой кассете. Когда кассета установлена (до щелчка) на место, контакты замыкаются, что позволяет подавать к кассете питание. При установке скоб из кассеты механическая блокировка не только останавливает продвижение скальпеля, но и с помощью цепи кассеты, активирующей светодиод на кассете, хирург может видеть на мониторе, что кассета заблокирована. Данный принцип может быть также расширен путем размещения небольшой батареи или другого аккумулятора заряда в кассете, чтобы исключить необходимость питания от основного устройства. Также цепь кассеты может быть отрегулирована таким образом, чтобы индикатор блокировки загорался при закрывании устройства для информирования пользователя о нахождении в устройстве израсходованной кассеты.
Индикаторная обратная связь для сочленения с силовым приводом и цвет кассеты. Считается, что для хирурга удобна индикация типа установленной кассеты (цвет) и угла поворота в шарнирном сочленении. Индикация угла поворота в шарнирном сочленении может осуществляться несколькими способами, включая числовой или графический, например, в виде дуги светодиодов. Такой индикатор может быть расположен на рукоятке в любом удобном месте или на стержне устройства проксимальнее концевого эффектора. Обратная связь от концевого эффектора может быть пассивной или активной. Активная связь может активировать дополнительные светодиоды для указания угла. При пассивной связи может активироваться только половина круга светодиодов, таким образом, хирург сможет интуитивно понять, как повернут концевой эффектор. При дальнейшем изучении хирургических манипуляций становится все более очевидным, что взгляд хирурга должен быть зафиксирован на месте проведения манипуляции, а не на рукоятке инструмента. Также очевидна необходимость полной обратной связи для хирурга о состоянии устройства. Угол шарнирного поворота может показываться на самом шарнирном сочленении лампами, светодиодами и т. д., обозначающими различные углы, либо на небольшом жидкокристаллическом дисплее, показывающем угол в градусах. Это позволит хирургу получать обратную связь об отклонении от прямого положения, так чтобы он/она могли легко изменить положение инструмента после извлечения или повторного введения. Следующей задачей является четкая индикация того, какого цвета кассета установлена в устройстве. Этого можно достигнуть путем цветового кода освещения либо на концевом эффекторе, либо на кассете. Данная информация может также передаваться обратно в рукоятку и отображаться на «дублирующем» дисплее, чтобы свести к минимуму риск ошибки с кассетой, которая находится в браншах. Другая оптимизация может включать в себя небольшую пластинчатую пружину, контактирующую с проксимальной платформой кассеты, которая показывает достижение минимального давления на ткань в зажиме. Такое минимальное давление будет по меньшей мере указывать на то, что применительно к тонкой ткани используется кассета для толстой ткани, поскольку при недостаточном давлении ткани на платформу индикация будет отсутствовать.
Предположительно существует необходимость в разработке способа вставки нестерильных батарей (предположительно, с электронной схемой, в случае если заказчику необходима программируемая логическая цепь). Уже разработан патент на вставку нестерильной батареи в ортопедическую дрель, которая представляет собой отдельно стерилизуемое устройство с возможностью повторного использования. Данное усовершенствование направлено на улучшение данного принципа путем использования одноразовой стерильной упаковки для устройства с целью обеспечения стерильности инструмента во время вставки нестерильной батареи. Другой оптимизацией является оснащение инструмента крышкой люка, закрывающейся после установки батареи, но до того, как устройство извлечено из последней стерильной упаковки. В такой люк вводится нестерильная батарея, которая может стать источником загрязнения стерильного операционного поля. Данный способ может предусматривать использование дополнительного слоя упаковки, имеющего область перфорации, через которую можно протолкнуть батарею путем либо разрывания дополнительного слоя с освобождением батареи, либо работы с набором электродов батареи, прорывающих упаковку выступающими концами игольчатых контактов батареи при полной вставке. Альтернативой может являться прорывание внутренними контактами в рукоятке (глубоко в полости для защиты батареи) стерильного барьера и размещение их в гнездовых контактах батареи. Затем люк можно закрыть через стерильную упаковку, герметично закрывающую систему. После этого с рукояткой можно работать в стерильных условиях обычным способом, как и с любым другим стерильным устройством.
Варианты осуществления навигатора. Датчик линейных перемещений и контроль параметров нагрузки электродвигателя. В патентах США №№ 6646307 и 6716223 описаны механизмы измерения параметров вращения и связанного крутящего момента для контроля параметров электродвигателя и их оптимизации на основе определения пространственного положения и нагрузки концевого эффектора. В публикации заявки на патент США № 2007/0175958 показан способ применения контроля линейного перемещения для контроля местоположения спускового механизма с использованием длины резьбовой части ведущего стержня, показанного на фиг. 8-13. Данный способ можно использовать для способов электронного контроля линейного перемещения. Концевой эффектор может определять свою длину и тип механическим способом путем нажатия на по меньшей мере один пружинный сердечник, что позволяет определять тип и длину рукоятки и позволяет разрешить запуск электродвигателя. Вращение электродвигателя может быть преобразовано из вращательного движения в линейное перемещение зубчатых реек или кабеля, которое затем может быть использовано для управления напряжением, силой тока и скоростью вращения электродвигателя, чтобы воздействовать желаемым образом на линейное перемещение контрольного скользящего контакта. Контрольный скользящий контакт может быть непосредственно связан с приводом, перемещающим скальпель. Такой контрольный скользящий контакт может иметь дискретные или непрерывные места «остановки», которым устройство определения сердечника присваивает статус предельного линейного перемещения до втягивания.
Определение смены типа модулей с линейным перемещением. Полезной функцией хирургического инструмента является способность определять, какой концевой эффектор прикреплен к инструменту. К механизированному хирургическому сшивающему инструменту могут быть прикреплены несколько типов концевых эффекторов. Кроме того, любой тип концевого эффектора может иметь по меньшей мере одну функцию и/или свойство, которые используются или подключаются выборочно. Ниже описаны средства определения типа прикрепленного концевого эффектора. Необходимо обратить внимание на то, что типы концевых эффекторов, представленные ниже, не ограничиваются механически, пневматически или гидравлически связанными концевыми эффекторами. В результате определения типа концевого эффектора инструмент может выполнить следующие действия: установить рабочие параметры, отобразить доступные функции и т. д.
Концевой эффектор имеет электрическую связь, которая создается после его прикрепления к инструменту. Инструмент взаимодействует с концевым эффектором и считывает по меньшей мере один из нескольких типов сигналов. Положение переключателя или контактов указывает на то, какой тип концевого эффектора был установлен. На пассивном элементе измеряется полное сопротивление, и результат указывает на то, какой тип концевого эффектора установлен.
Концевой эффектор имеет радиочастотный канал связи с инструментом, и данные передаются между концевым эффектором и инструментом по меньшей мере в одном направлении.
Концевой эффектор имеет акустическую линию связи с инструментом и данные передаются между концевым эффектором и инструментом по меньшей мере в одном направлении.
Концевой эффектор имеет оптическую линию связи с инструментом и данные передаются между концевым эффектором и инструментом по меньшей мере в одном направлении.
Концевой эффектор имеет механический элемент связи, зацепляющий элементы (такие как переключатели или контакты) инструмента, и таким образом данные передаются между концевым эффектором и инструментом по меньшей мере в одном направлении.
Хотя данное изобретение было проиллюстрировано с помощью различных вариантов осуществления, и указанные варианты осуществления были описаны достаточно подробно, заявитель не имеет намерения сократить или иным образом ограничить объем прилагаемой формулы изобретения. Дополнительные преимущества и модификации могут быть очевидными для специалистов в данной области.
Например, хотя описанные выше варианты осуществления имеют преимущества для работы эндоскопического хирургического режуще-сшивающего инструмента 10, аналогичные варианты осуществления можно применять и для других клинических процедур. По существу считается, что эндоскопические процедуры распространены в большей степени, чем лапароскопические процедуры. В соответствии с этим настоящее изобретение обсуждалось в контексте эндоскопических методик и оборудования. Однако в настоящем документе термин «эндоскопический» не должен считаться ограничивающим настоящее изобретение рамками хирургического инструмента, использующегося только в сочетании с эндоскопической трубкой (то есть троакаром). Наоборот, предполагается, что настоящее изобретение может найти применение в любых процедурах с ограниченным доступом в виде небольшого разреза, включая без ограничений лапароскопические процедуры, а также операции открытого доступа.
Любой патент, публикация или информация, в полном объеме или частично, которая упомянута как включенная путем ссылки в настоящее описание, включена в него только в той мере, в которой включенный материал не противоречит существующим определениям, утверждениям или другому раскрываемому материалу, указанному в настоящем документе. Таким образом, описание, явно приведенное в настоящем документе, заменяет собой любой противоречащий ему материал, включенный в настоящий документ путем ссылки.
Хотя в описании настоящего изобретения представлены примеры промышленных образцов, настоящее изобретение можно дополнительно модифицировать в рамках сущности и объема приведенного описания. Следовательно, предполагается, что настоящая заявка охватывает все возможные вариации, способы применения или модификации настоящего изобретения с использованием его основных принципов. Кроме того, предполагается, что настоящая заявка охватывает такие отклонения от настоящего описания, которые подпадают под известную или общепринятую практику в области, к которой принадлежит настоящее изобретение.

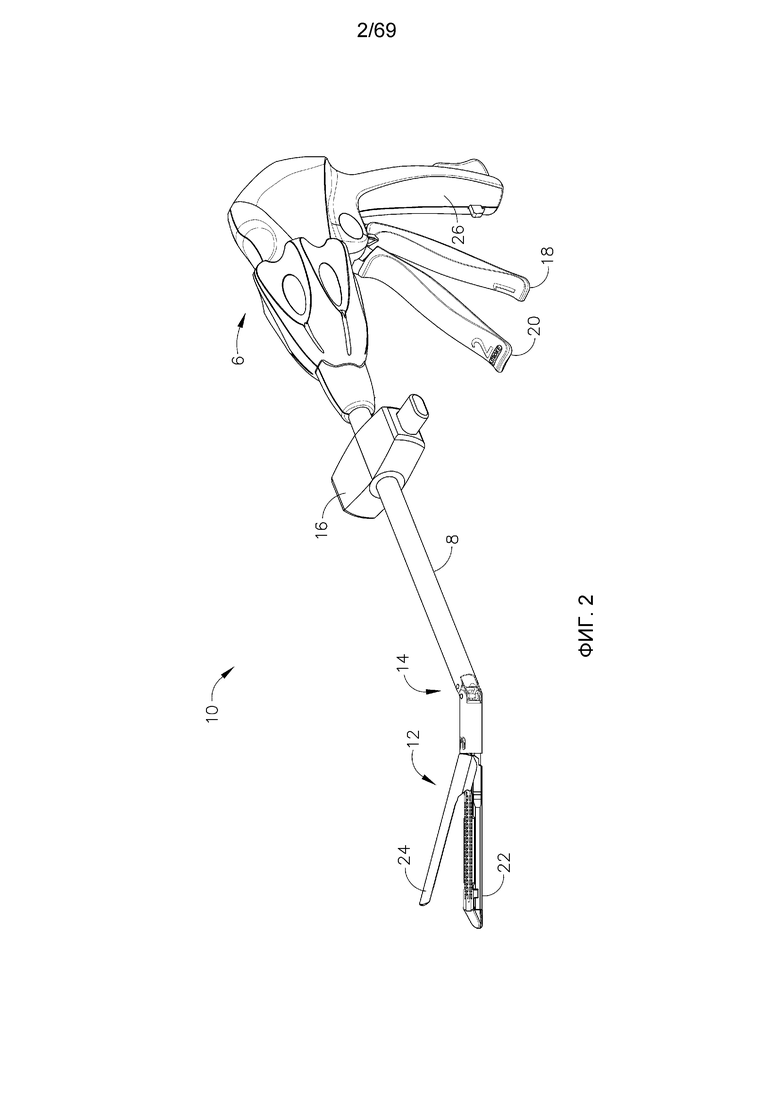
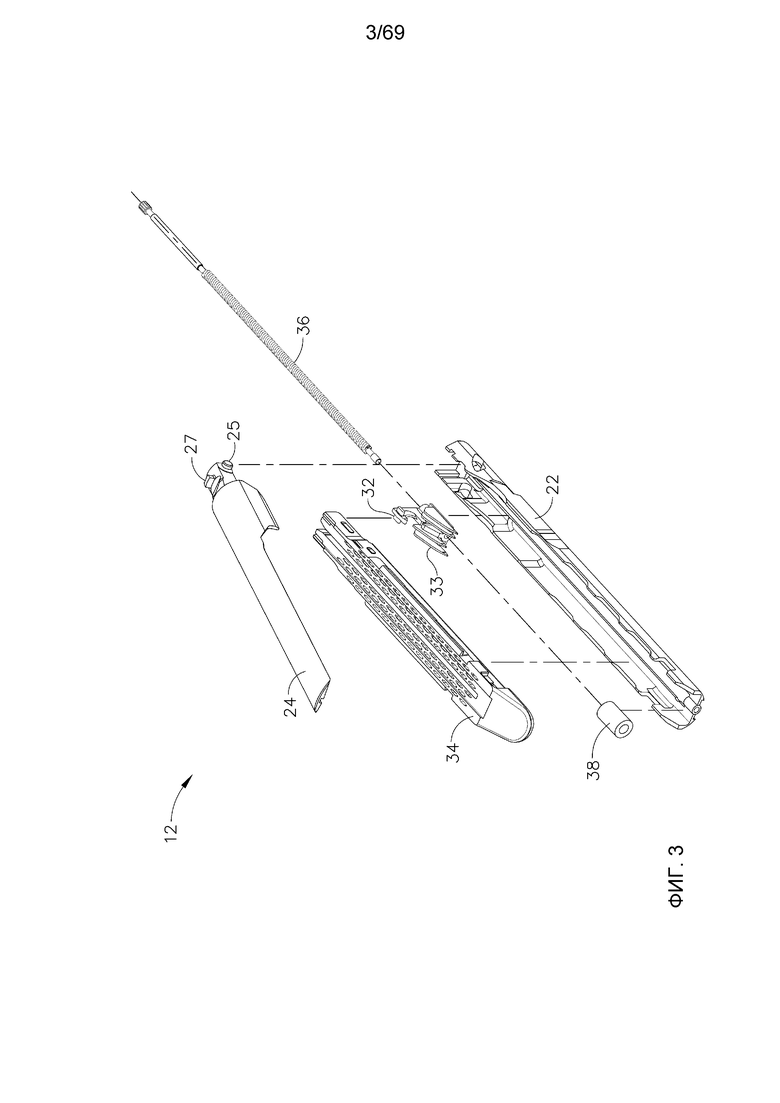

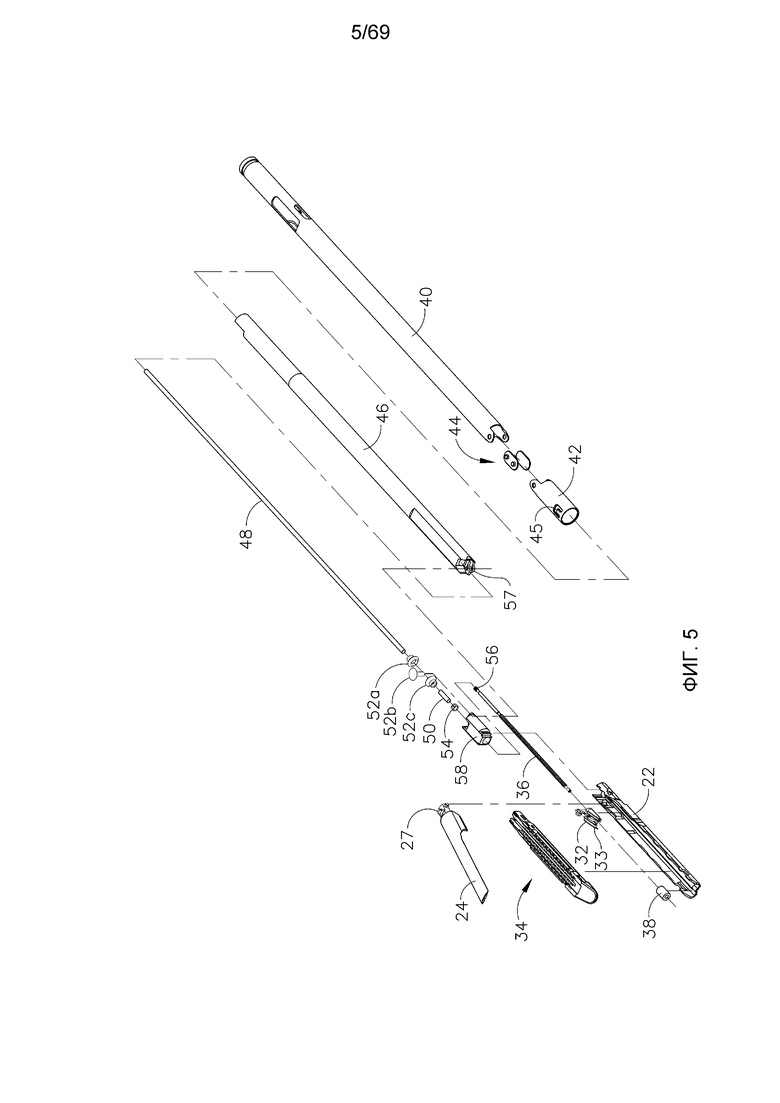


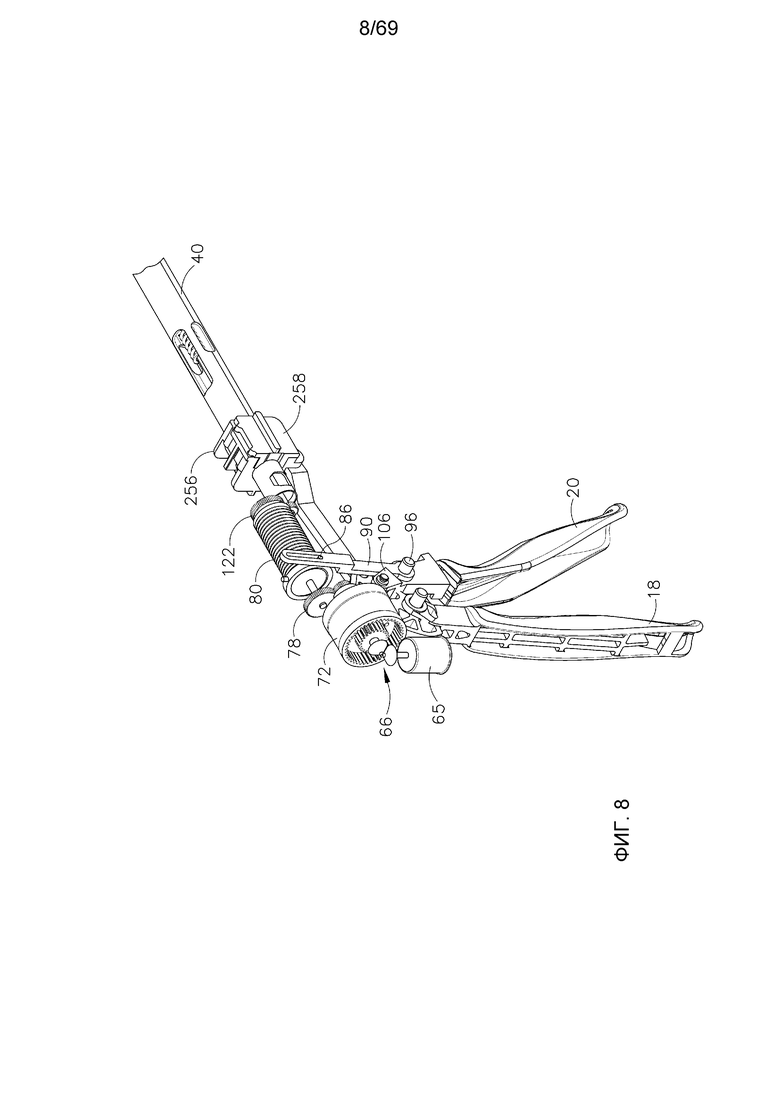



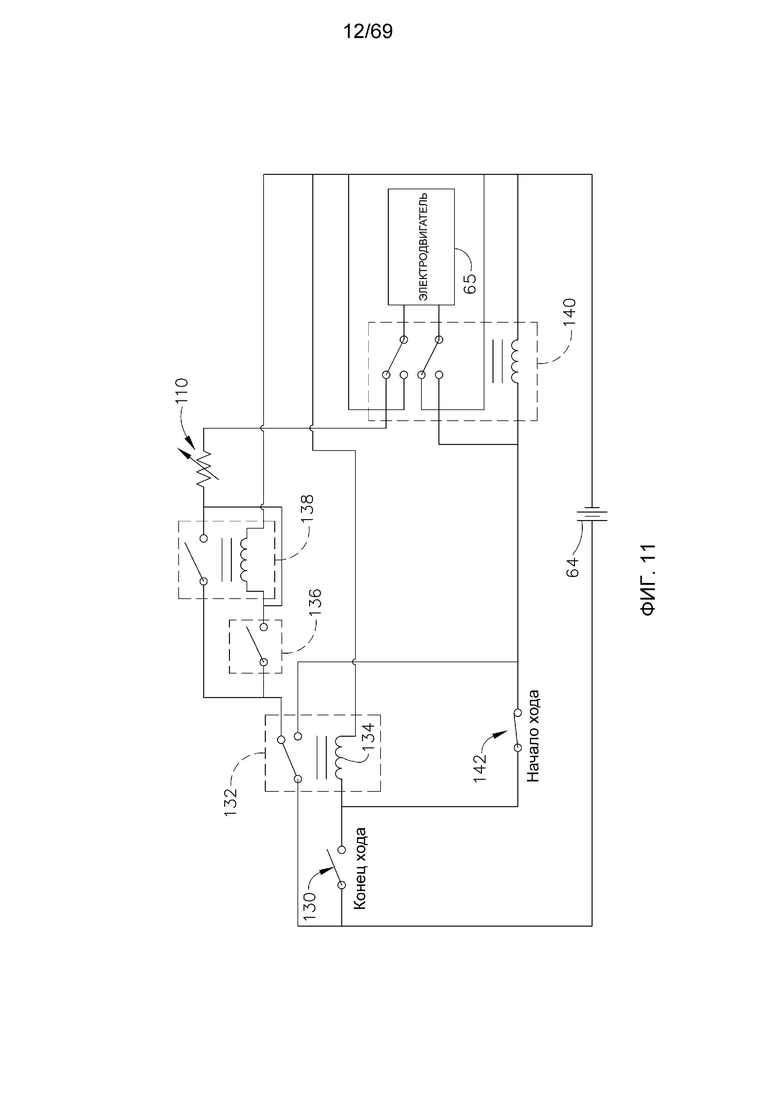


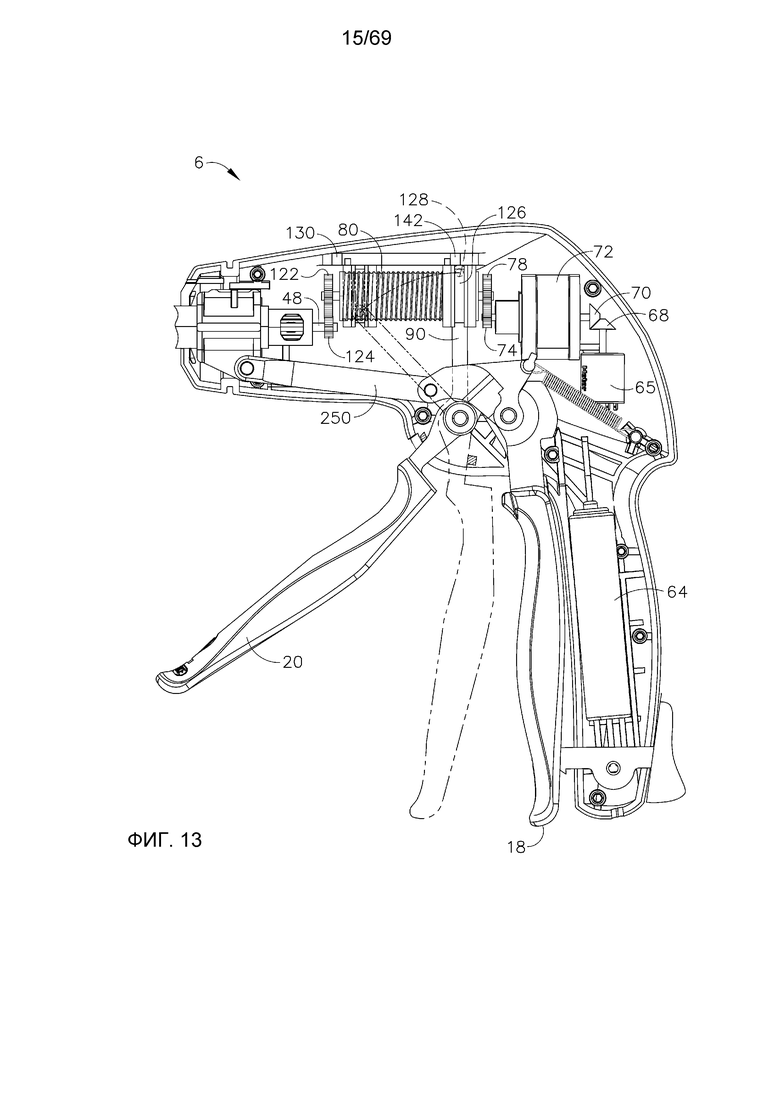
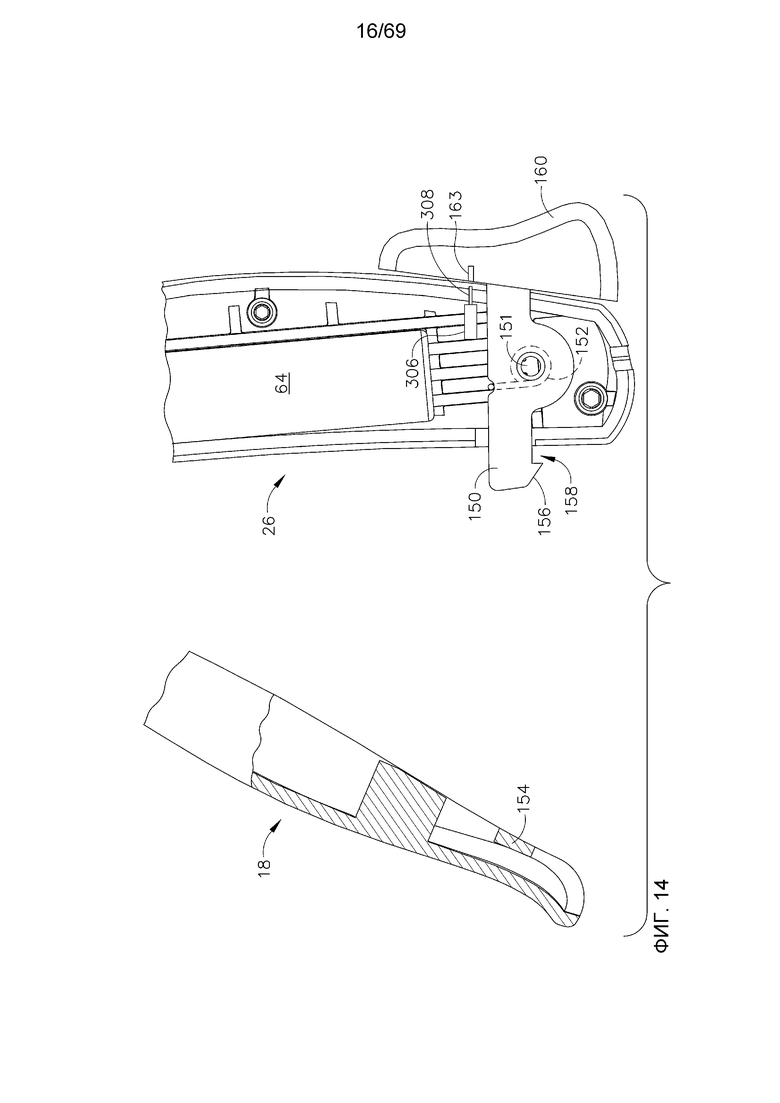
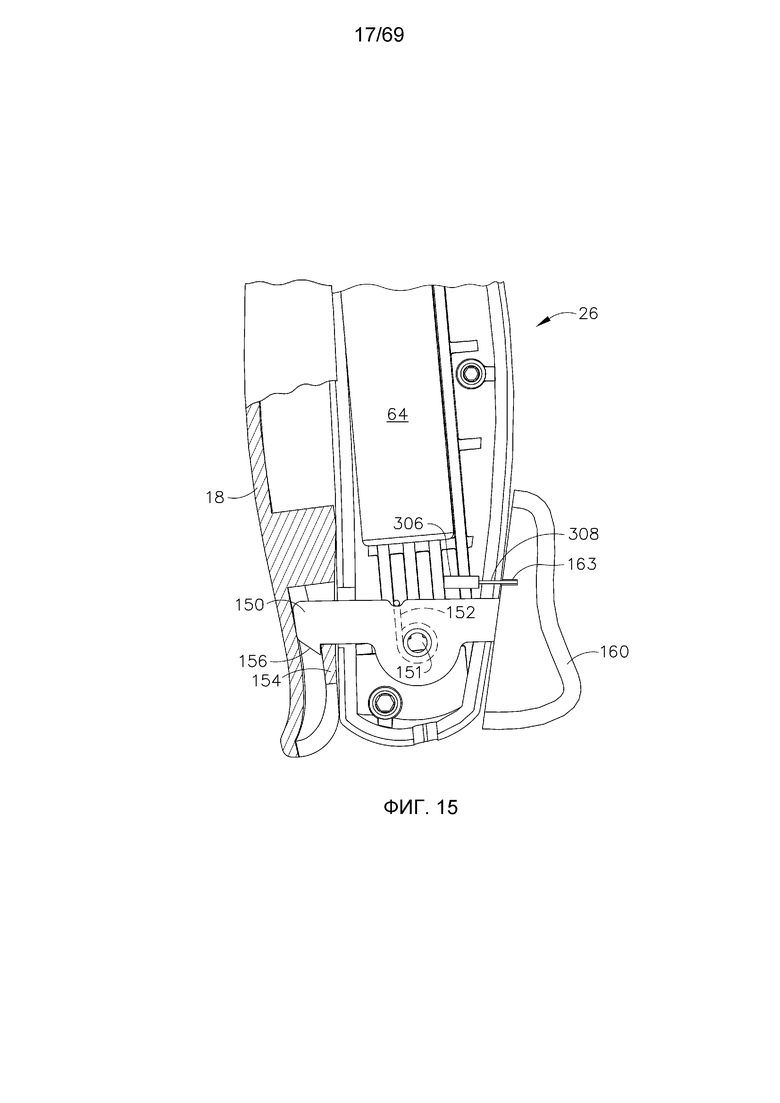


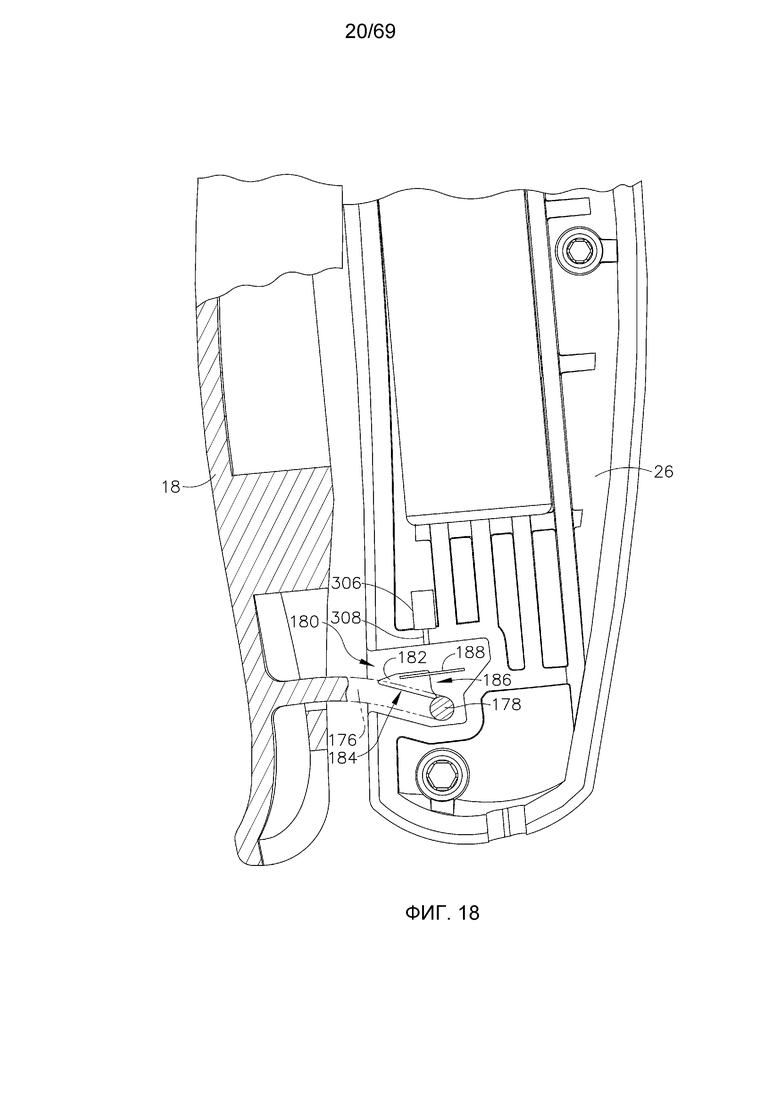




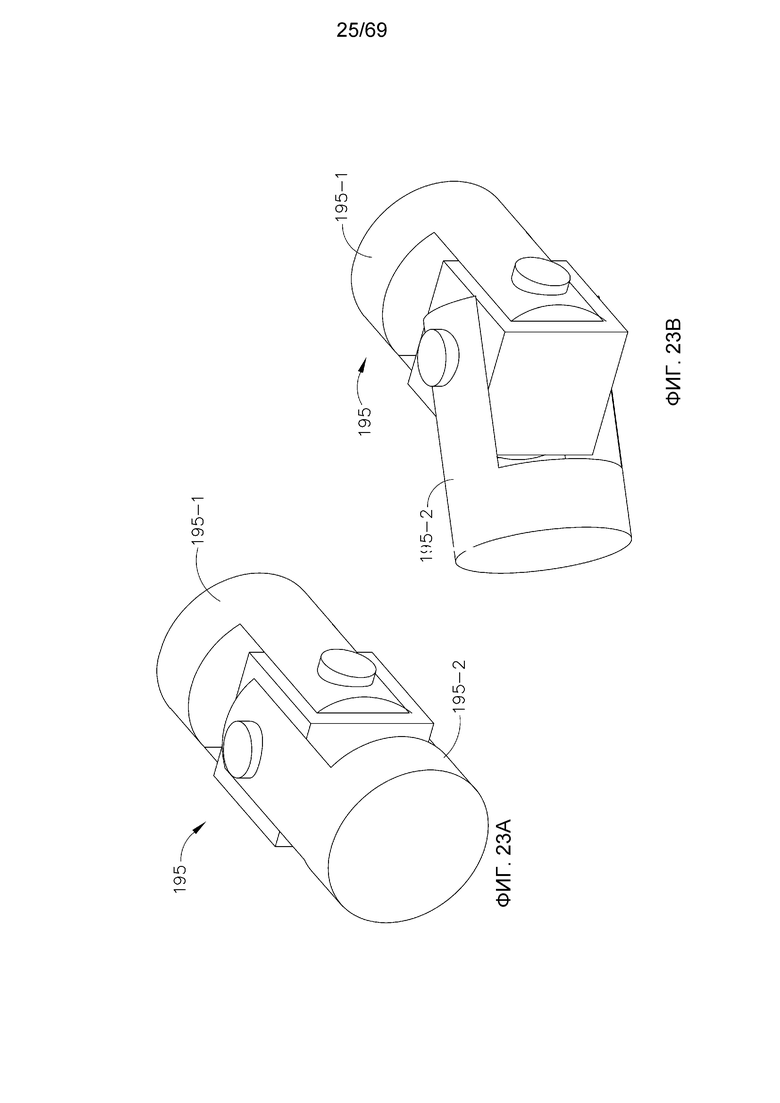



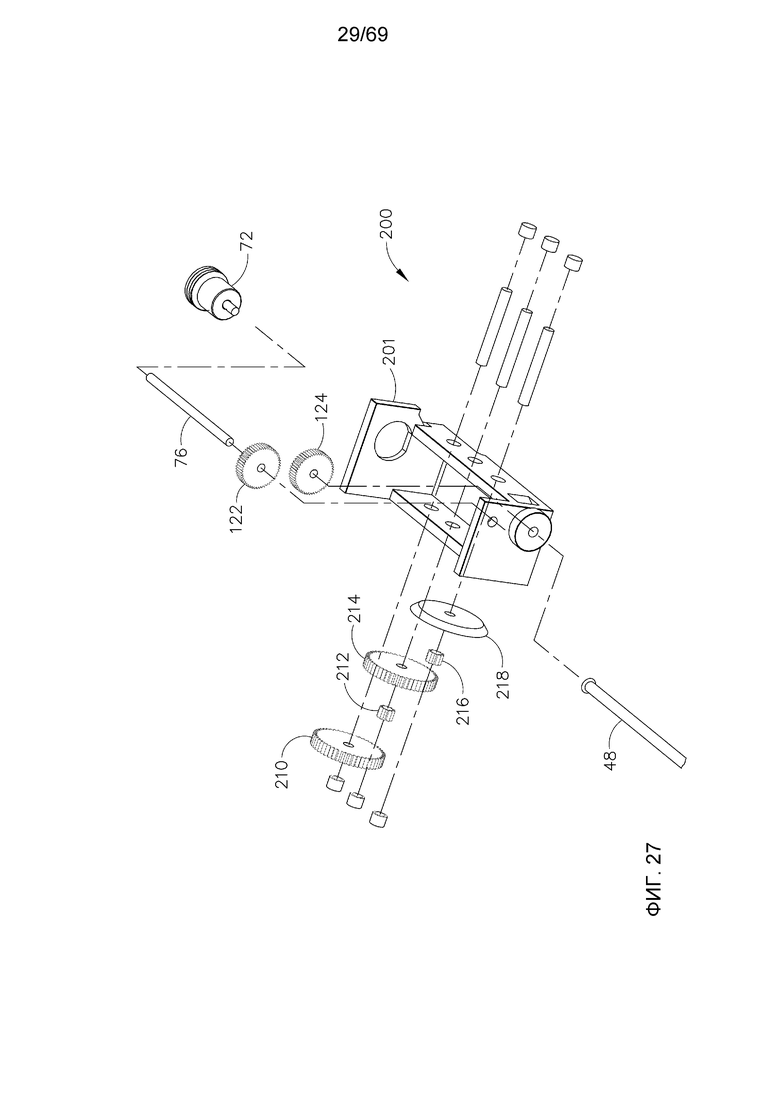
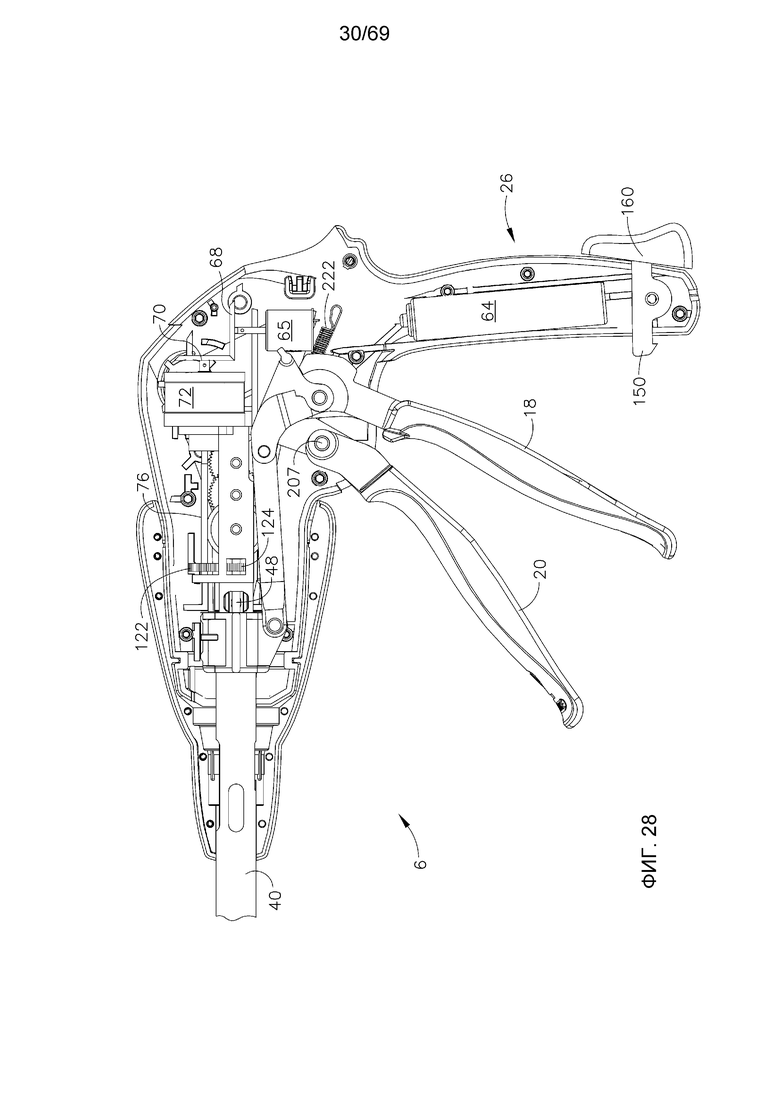



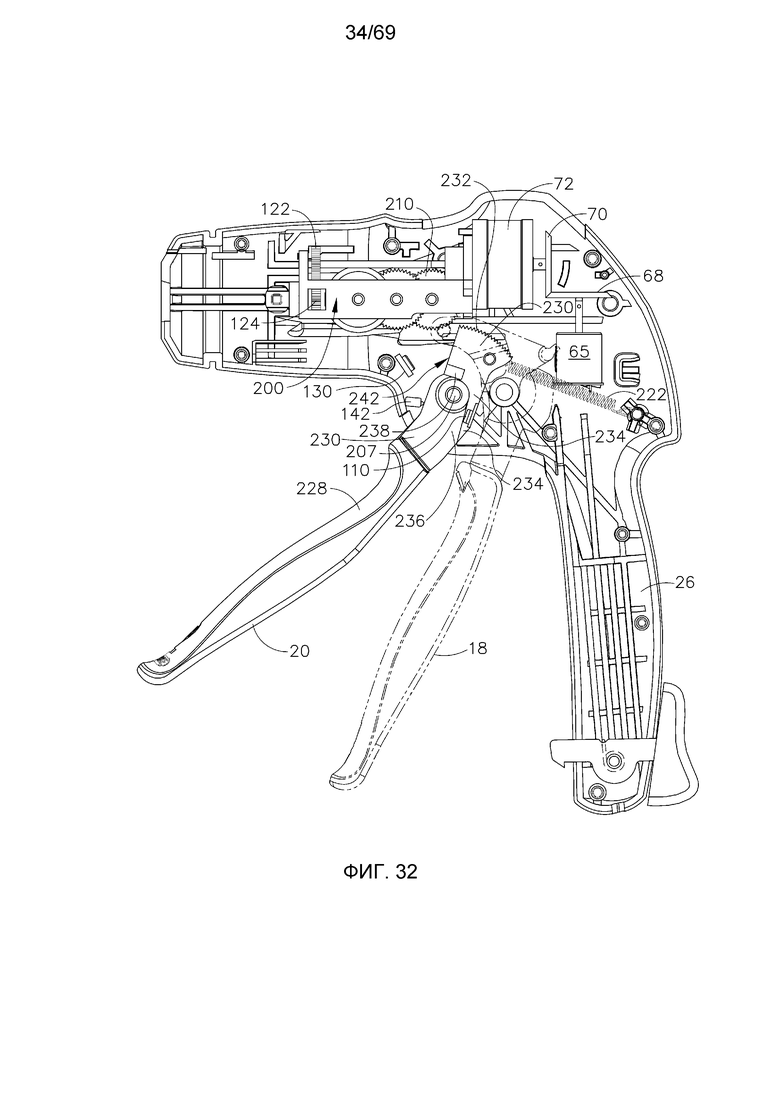

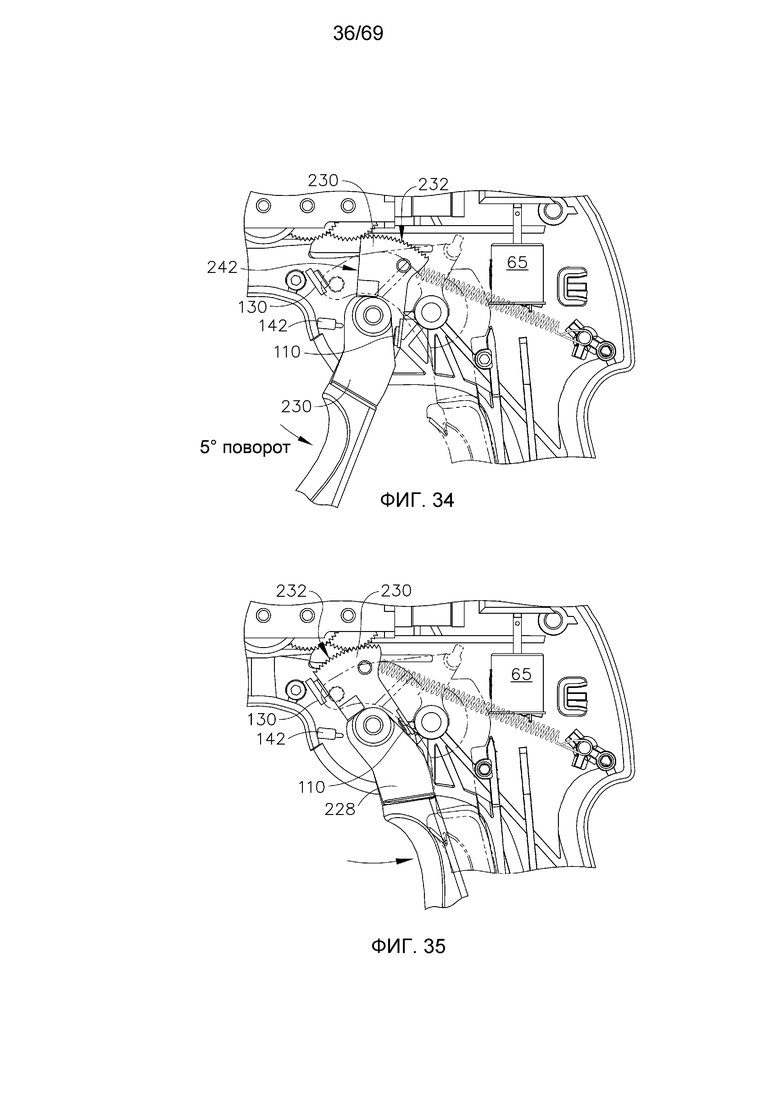


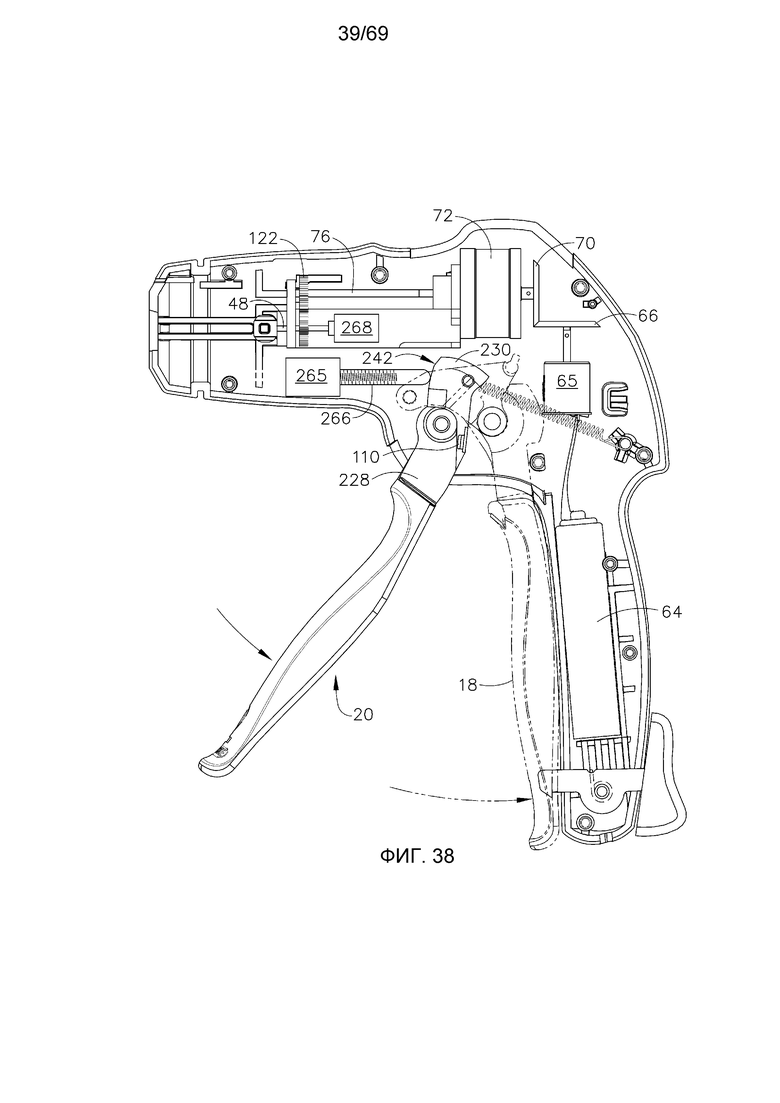


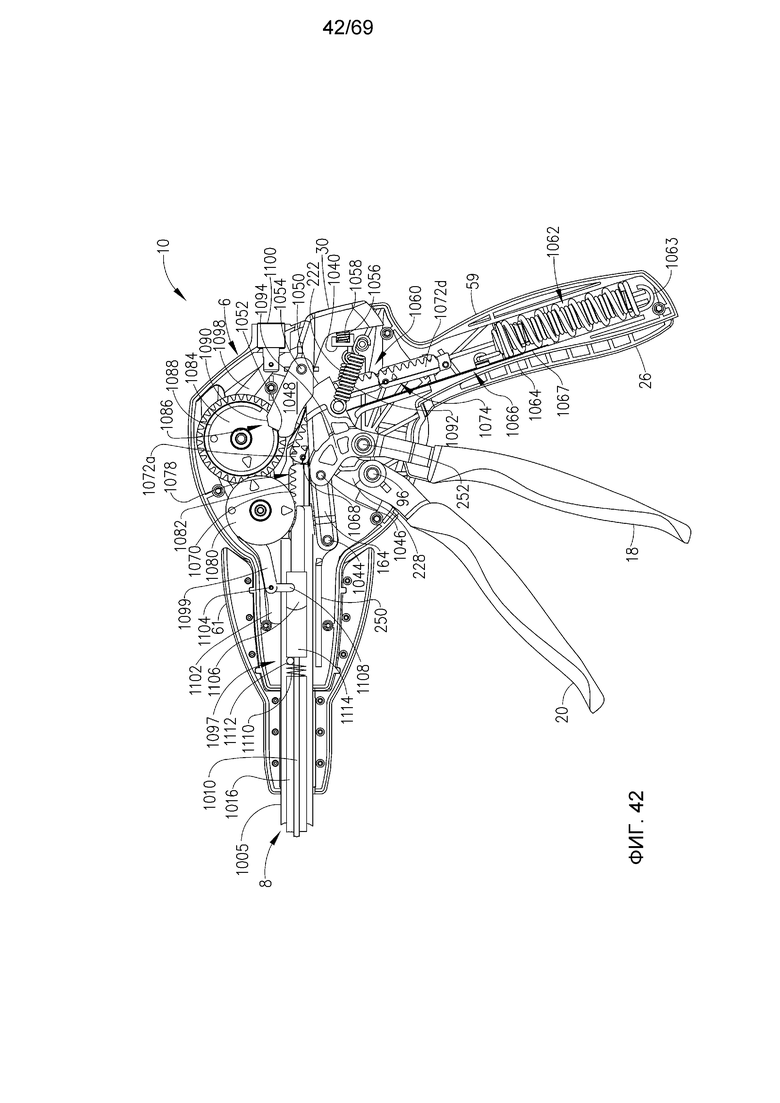

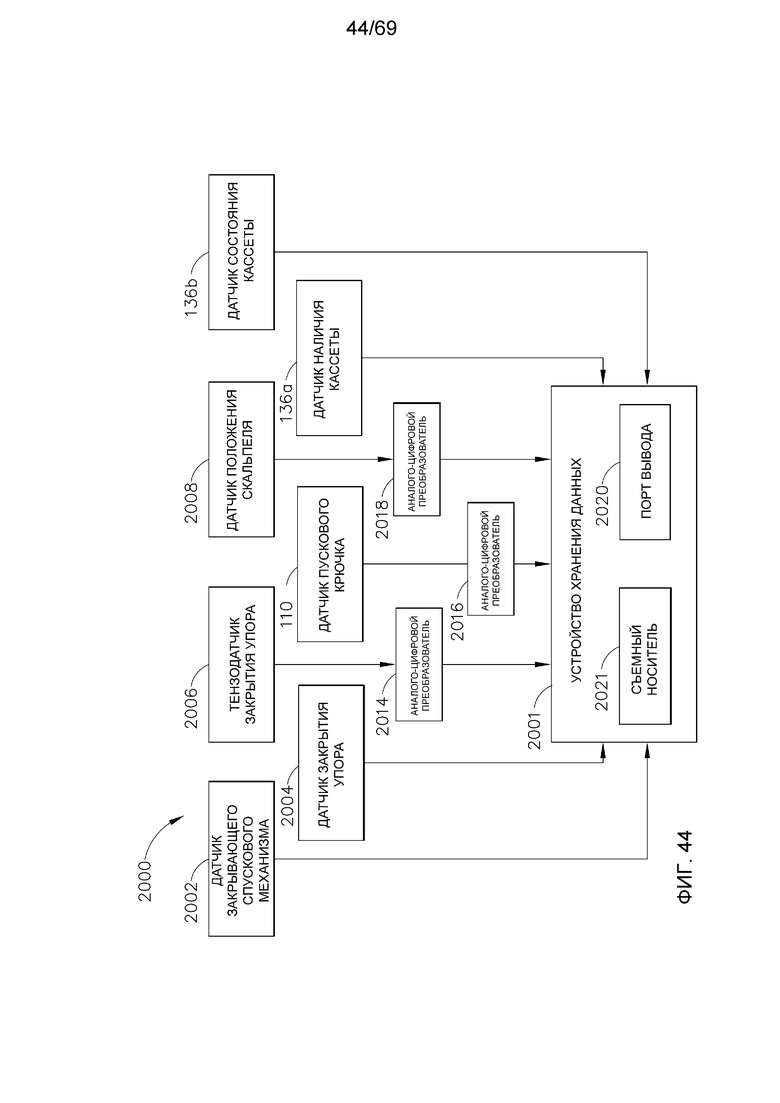



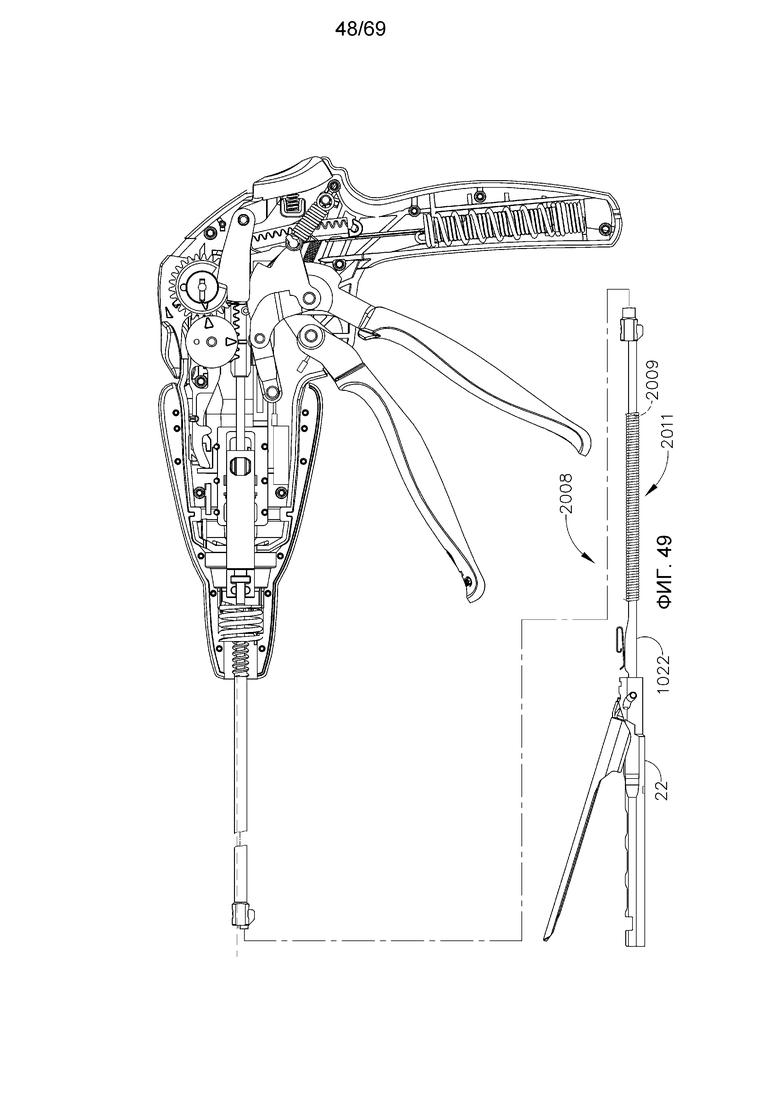
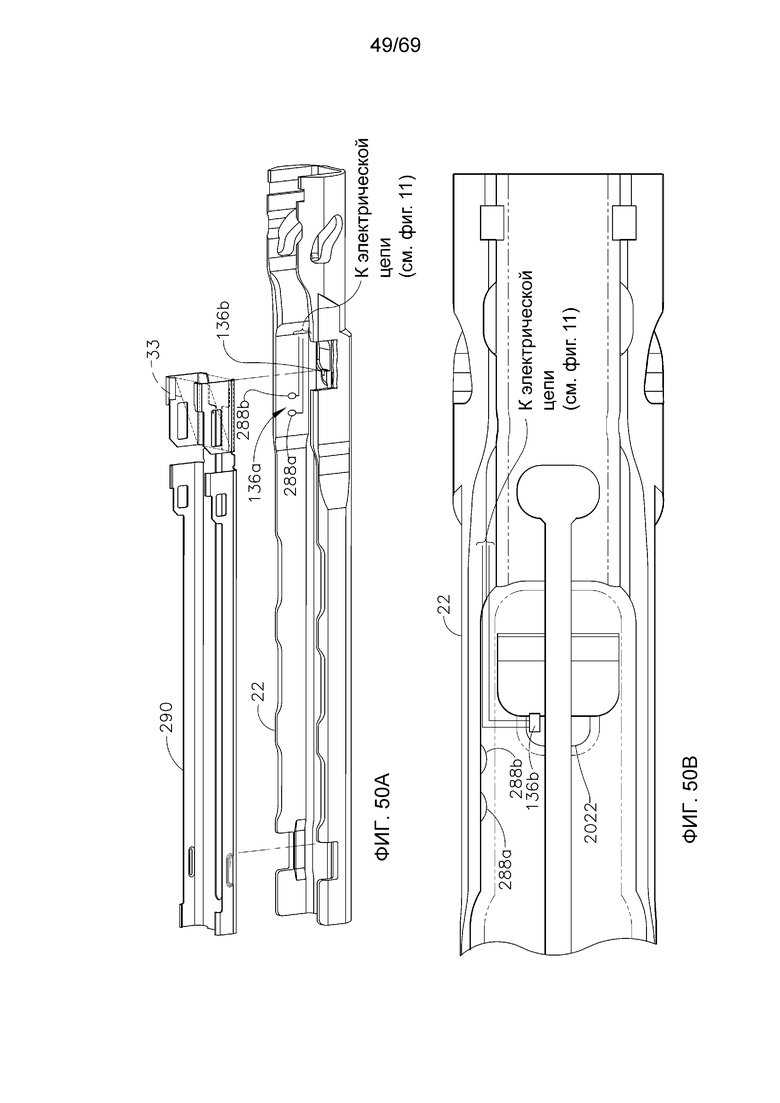
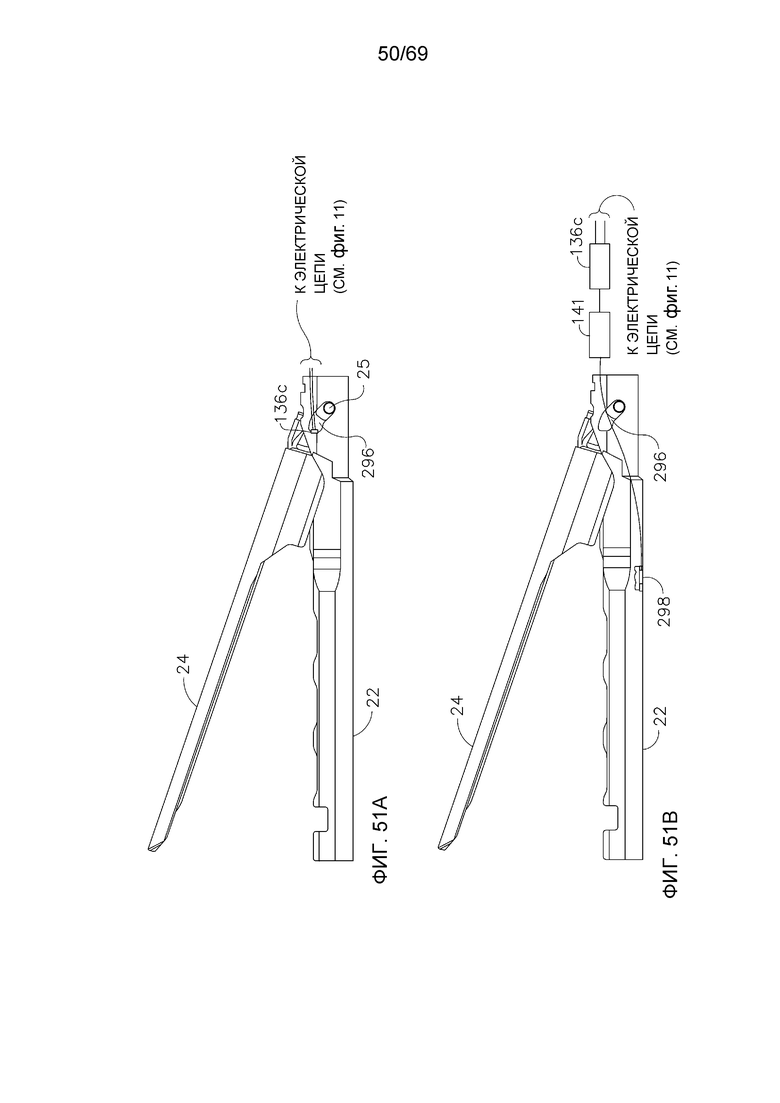



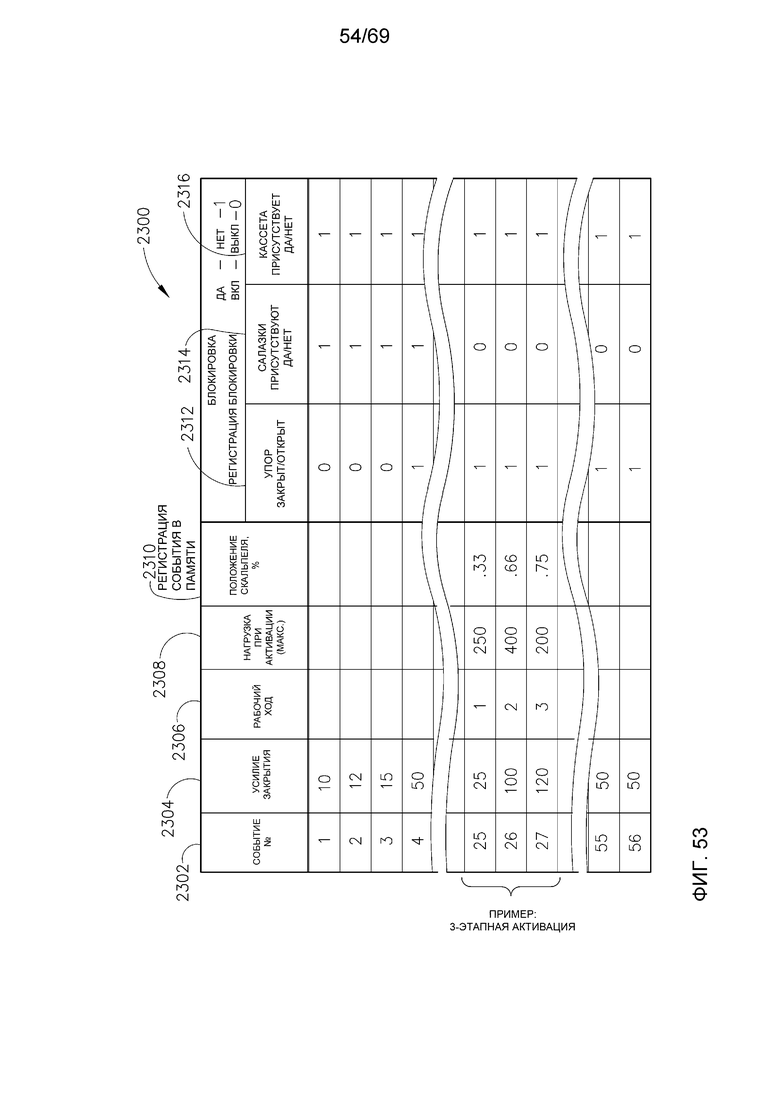




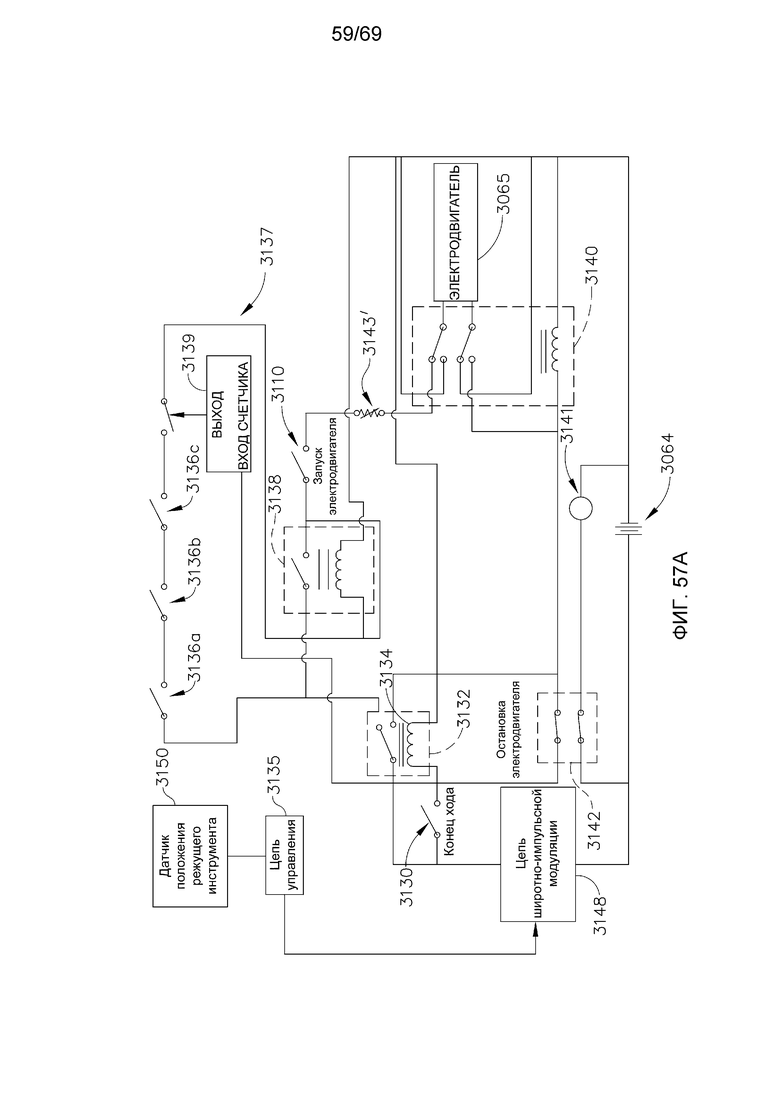


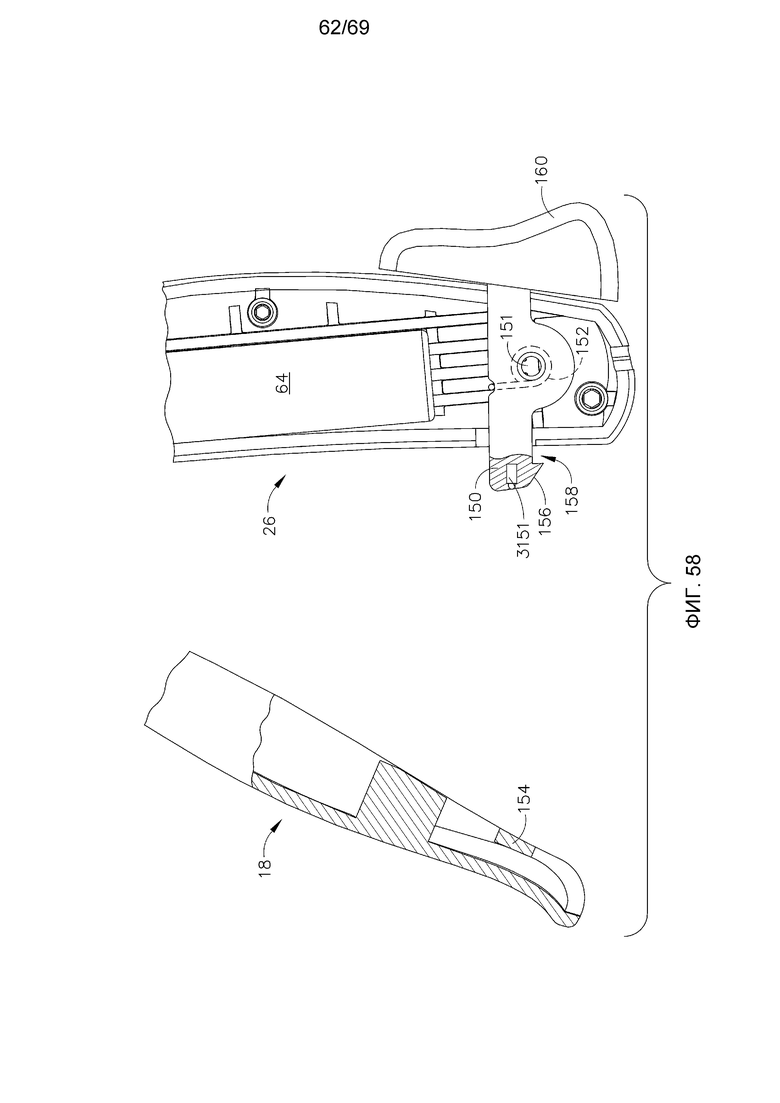
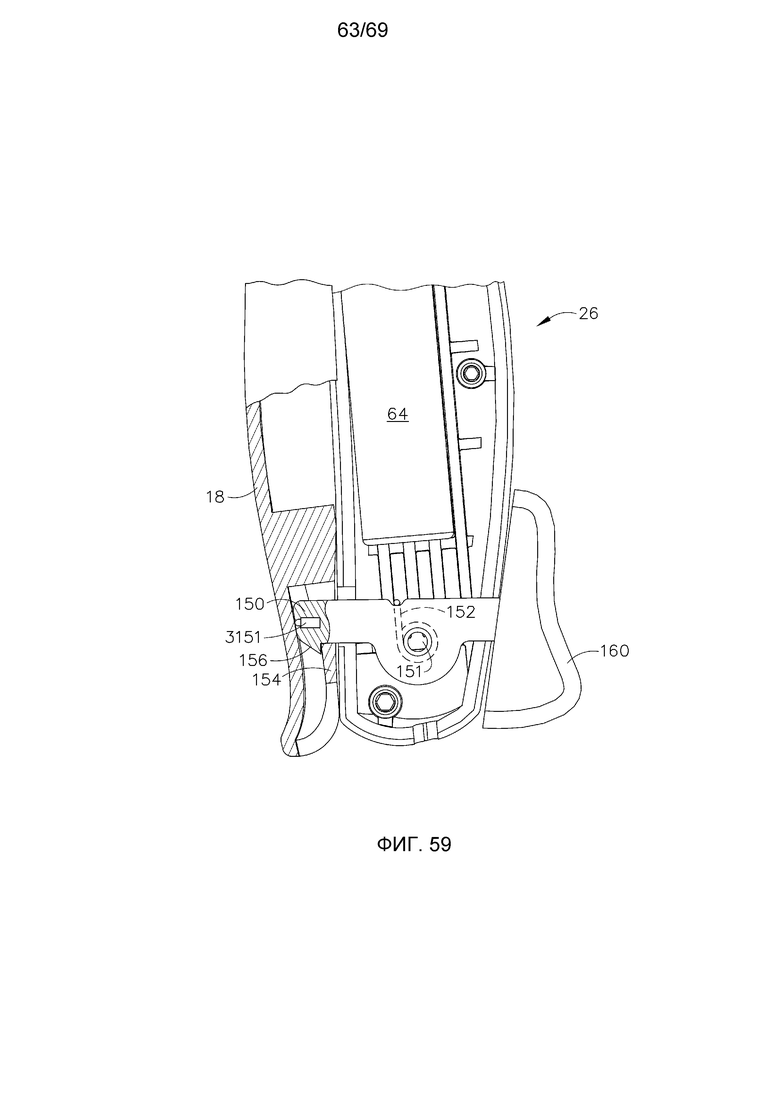
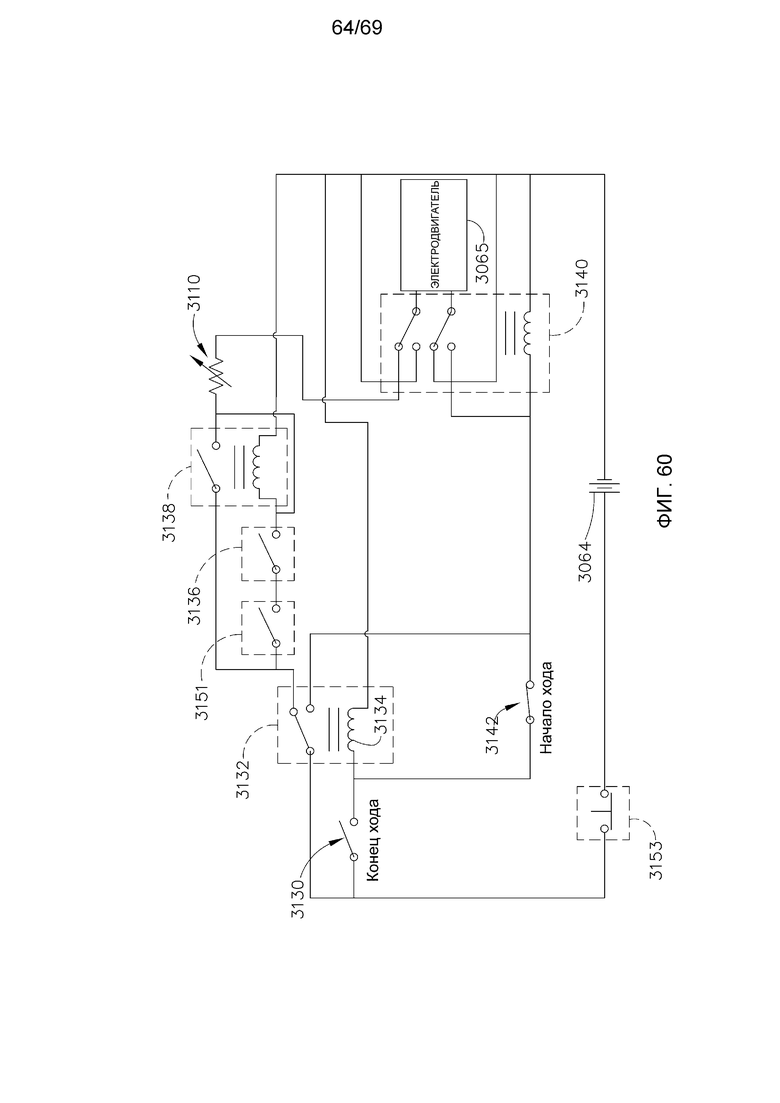
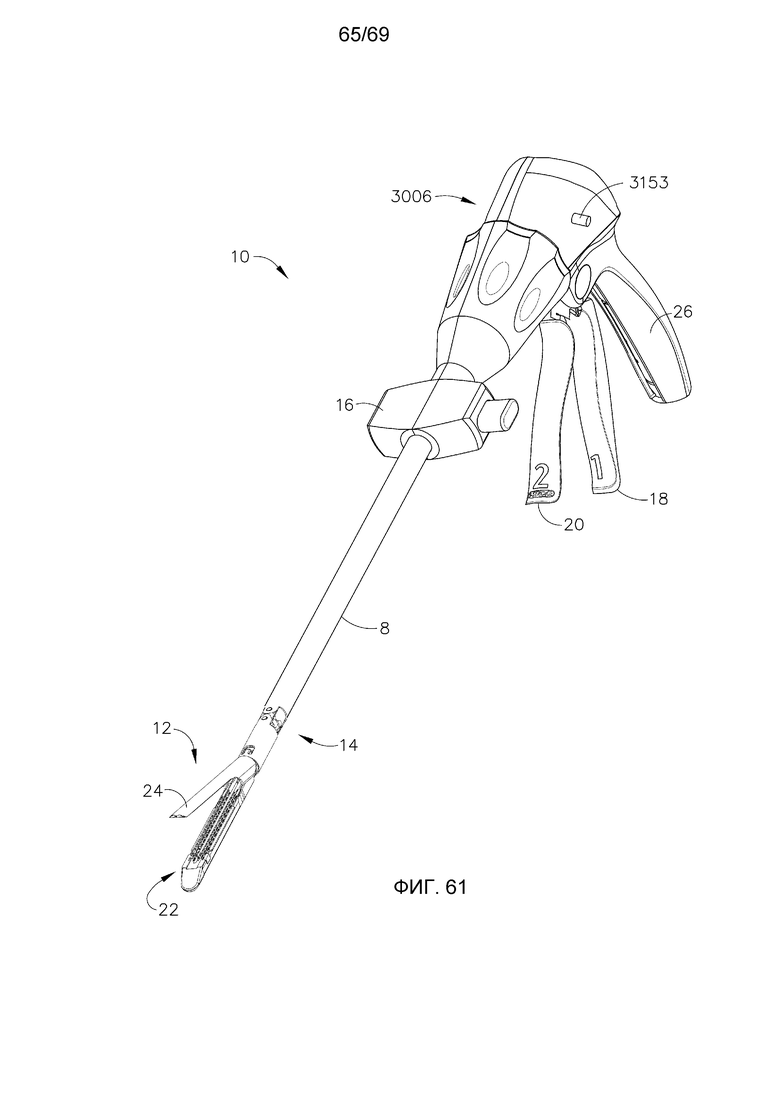


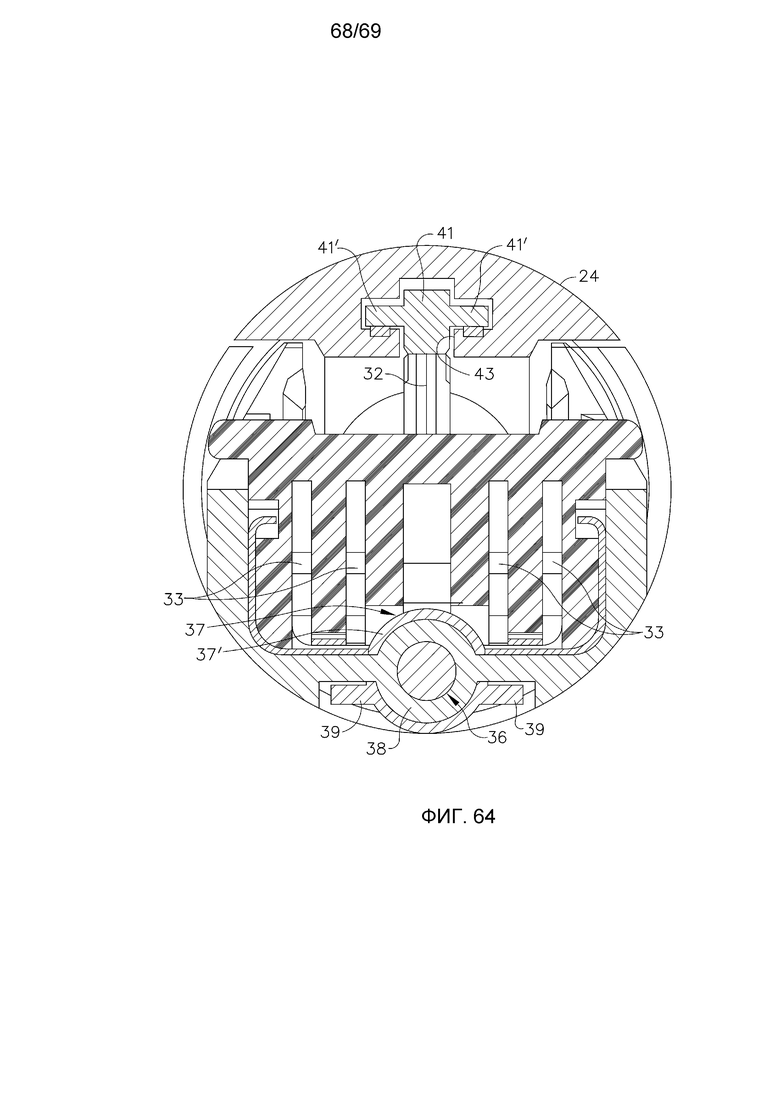

Изобретение относится к медицинской технике. Хирургическое сшивающее устройство содержит рукоятку, концевой эффектор, электрический привод для размещения хирургических крепежных элементов, механизм активации и механизм блокировки. Концевой эффектор содержит пару браншей, имеющих открытое положение и закрытое положение. Бранши содержат канал для приема кассеты, содержащей множество хирургических крепежных элементов. Электрический привод содержит источник питания, электродвигатель и рабочую часть, выполненную с возможностью перемещения внутри концевого эффектора между невыдвинутым положением и выдвинутыми положениями. Электродвигатель функционально взаимодействует с рабочей частью, избирательно сообщая ей движение в дистальном направлении для перемещения рабочей части из невыдвинутого положения в выдвинутые положения и избирательно сообщая рабочей части движение в проксимальном направлении для втягивания рабочей части в невыдвинутое положение из выдвинутых положений. Механизм активации присоединен к рукоятке для перемещения пары браншей из открытого в закрытое положение и активации привода и содержит спусковой механизм втягивания. Механизм блокировки выполнен с возможностью пропускать ток от источника питания к электродвигателю, когда пара браншей находится в закрытом положении, и предотвращать прохождение тока от источника питания к электродвигателю, когда пара браншей находится в открытом положении. Нажатие спускового механизма втягивания при втягивании рабочей части обеспечивает уменьшение прохождения тока от источника питания к электродвигателю пропорционально усилию нажатия для замедления втягивания рабочей части. Обеспечивается блокировка в механизированных режуще-сшивающих инструментах, которая предотвращает непреднамеренную активацию (т.е. рассечение и сшивание) и манипулирование браншами. 20 з.п. ф-лы, 69 ил.
1. Хирургическое сшивающее устройство, содержащее:
рукоятку;
концевой эффектор, содержащий пару браншей, имеющих открытое положение и закрытое положение, причем по меньшей мере одна из браншей содержит канал для приема кассеты, содержащей множество хирургических крепежных элементов; и
электрический привод для размещения хирургических крепежных элементов, причем привод содержит источник питания, электродвигатель и рабочую часть, выполненную с возможностью перемещения внутри концевого эффектора между невыдвинутым положением и выдвинутыми положениями, и причем электродвигатель функционально взаимодействует с рабочей частью, избирательно сообщая ей движение в дистальном направлении для перемещения рабочей части из невыдвинутого положения в выдвинутые положения и избирательно сообщая рабочей части движение в проксимальном направлении для втягивания рабочей части в невыдвинутое положение из выдвинутых положений;
механизм активации, присоединенный к рукоятке для перемещения пары браншей из открытого в закрытое положение и активации привода, причем механизм активации содержит спусковой механизм втягивания; и
механизм блокировки, выполненный с возможностью пропускать ток от источника питания к электродвигателю, когда пара браншей находится в закрытом положении, и предотвращать прохождение тока от источника питания к электродвигателю, когда пара браншей находится в открытом положении,
при этом нажатие спускового механизма втягивания при втягивании рабочей части обеспечивает уменьшение прохождения тока от источника питания к электродвигателю пропорционально усилию нажатия для замедления втягивания рабочей части.
2. Хирургическое сшивающее устройство по п. 1, дополнительно содержащее переключатель втягивания, соединенный с источником питания и электродвигателем и содержащий обычно замкнутый контактный участок и резистор переменного сопротивления, при этом нажатие спускового механизма втягивания обеспечивает активацию резистора переменного сопротивления переключателя втягивания таким образом, что сопротивление увеличивается пропорционально усилию нажатия для уменьшения тока к электродвигателю.
3. Хирургическое сшивающее устройство по п. 2, в котором дальнейшее нажатие спускового механизма втягивания обеспечивает размыкание контактного участка переключателя втягивания, тем самым прерывая прохождение тока к электродвигателю.
4. Хирургическое сшивающее устройство по п. 3, в котором высвобождение спускового механизма втягивания возвращает контактный участок переключателя втягивания в обычное замкнутое состояние, тем самым вновь обеспечивая прохождение тока от источника питания к электродвигателю для завершения втягивания рабочего участка.
5. Хирургическое сшивающее устройство по любому из предшествующих пунктов, дополнительно содержащее стержень, расположенный между рукояткой и концевым эффектором, причем стержень образует проксимальный конец, прикрепленный к рукоятке, и дистальный конец, прикрепленный к концевому эффектору.
6. Хирургическое сшивающее устройство по любому из предшествующих пунктов, в котором механизм блокировки дополнительно содержит переключатель предохранителя закрытия, соединенный с источником питания и электродвигателем, так что механизм блокировки позволяет току проходить от источника питания к электродвигателю, когда пара браншей находится в закрытом положении, и предотвращает прохождение тока от источника питания к электродвигателю, когда пара браншей находится в открытом положении.
7. Хирургическое сшивающее устройство по любому из предшествующих пунктов, в котором механизм активации содержит пусковой крючок и закрывающий спусковой механизм,
причем закрывающий спусковой механизм имеет первое положение, заставляющее пару браншей перейти в открытое положение, и второе положение, заставляющее пару браншей перейти в закрытое положение; и
причем механизм блокировки содержит датчик запуска электродвигателя, расположенный так, чтобы позволить току проходить от источника питания к электродвигателю при активации пускового крючка; и
причем пусковой крючок и закрывающий спусковой механизм расположены относительно друг друга таким образом, что активация пускового крючка вызывает активацию датчика запуска электродвигателя, когда закрывающий спусковой механизм находится во втором положении, и что активация пускового крючка не приводит к активации датчика запуска электродвигателя в первом положении.
8. Хирургическое сшивающее устройство по п. 7, в котором спусковой механизм втягивания закреплен на пусковом крючке для перемещения вместе с ним.
9. Хирургическое сшивающее устройство по п. 8, в котором рабочий участок спускового механизма втягивания может быть приведен в контакт с переключателем втягивания прижатием спускового механизма втягивания к пусковому крючку независимо от положения пускового крючка при втягивании рабочего участка.
10. Хирургическое сшивающее устройство по любому из предшествующих пунктов, в котором механизм блокировки содержит переключатель датчика блокировки, причем переключатель датчика блокировки разомкнут для предотвращения прохождения тока от источника питания к электродвигателю, когда пара браншей находится в открытом положении, и замкнут, позволяя току проходить от источника питания к электродвигателю, когда пара браншей находится в закрытом положении.
11. Хирургическое сшивающее устройство по п. 10, в котором переключатель датчика блокировки расположен на концевом эффекторе.
12. Хирургическое сшивающее устройство по п. 10, в котором механизм блокировки дополнительно содержит датчик усилия, расположенный с возможностью воспринимать величину сжимающего усилия, приложенного между первым и вторым элементами бранши, и в котором переключатель датчика блокировки чувствителен к состоянию датчика усилия.
13. Хирургическое сшивающее устройство по п. 12, в котором механизм блокировки дополнительно содержит компаратор, связанный с датчиком усилия и переключателем датчика блокировки, причем компаратор также выполнен с возможностью замыкать переключатель датчика блокировки, когда полученный от датчика усилия сигнал указывает, что величина сжимающего усилия, приложенного между первым и вторым элементами бранши, превышает первое пороговое значение.
14. Хирургическое сшивающее устройство по любому из пп. 10-13, в котором переключатель датчика блокировки выполнен с возможностью замыкаться через заданный период времени после перемещения пары браншей в закрытое положение.
15. Хирургическое сшивающее устройство по любому из пп. 1-3, в котором механизм активации содержит:
первый спусковой механизм, прикрепленный к рукоятке и сообщающийся с концевым эффектором таким образом, что, когда первый спусковой механизм находится в полностью активированном положении, концевой эффектор перемещается из открытого положения в закрытое положение;
второй спусковой механизм, прикрепленный к рукоятке, для активации привода;
причем хирургическое сшивающее устройство дополнительно содержит фиксатор, функционально установленный на одно из рукоятки и первого спускового механизма для разъемного удержания первого спускового механизма в полностью активированном положении; и
причем механизм блокировки содержит связанный с фиксатором переключатель предохранителя закрытия, который соединен с источником питания и электродвигателем таким образом, что, когда фиксатор удерживает первый спусковой механизм в полностью активированном положении, переключатель предохранителя закрытия допускает прохождение тока от источника питания к электродвигателю, а когда первый спусковой механизм не зафиксирован в полностью активированном положении, переключатель предохранителя закрытия предотвращает прохождение тока от источника питания к электродвигателю.
16. Хирургическое сшивающее устройство по п. 15, в котором указанный фиксатор содержит крючок, прикрепленный с возможностью поворота к указанной рукоятке и выполненный с возможностью избирательного перемещения из незафиксированного положения в зафиксированное положение, причем указанный крючок зацепляет с возможностью удержания часть указанного первого спускового механизма.
17. Хирургическое сшивающее устройство по п. 16, в котором указанный крючок смещен в указанное зафиксированное положение.
18. Хирургическое сшивающее устройство по любому из предшествующих пунктов, в котором кассета поддерживается с возможностью снятия в части канала концевого эффектора, и причем хирургическое сшивающее устройство содержит переключатель датчика кассеты, соединенный с источником питания и электродвигателем, причем переключатель датчика кассеты предотвращает прохождение тока от источника питания к электродвигателю, пока кассета функционально не установлена в части канала концевого эффектора.
19. Хирургическое сшивающее устройство по любому из предшествующих пунктов, в котором электрический привод дополнительно содержит:
поворотный приводной стержень, поддерживаемый с возможностью поворота внутри концевого эффектора и функционально соединенный с электродвигателем для приема от него вращательного движения; и
рабочую часть, функционально взаимодействующую с поворотным приводным стержнем таким образом, что при прохождении тока к электродвигателю в первом направлении рабочая часть внутри концевого эффектора переводится из невыдвинутого положения в выдвинутое положение, а при прохождении тока к электродвигателю во втором направлении рабочая часть переводится из выдвинутого положения в невыдвинутое положение.
20. Хирургическое сшивающее устройство по п. 19, в котором рабочая часть содержит режущий элемент и салазки для сообщения пускового движения множеству хирургических крепежных элементов, находящихся внутри кассеты.
21. Хирургическое сшивающее устройство по любому из предшествующих пунктов, дополнительно содержащее второй механизм блокировки, выполненный с возможностью обеспечить прохождение тока от источника питания к электродвигателю, когда кассета установлена в концевом эффекторе, и предотвратить прохождение тока от источника питания к электродвигателю, когда кассета не установлена в концевом эффекторе.
| ЭЛЕКТРОННЫЕ БЛОКИРОВКИ И ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ, СОДЕРЖАЩИЙ ЭЛЕКТРОННЫЕ БЛОКИРОВКИ | 2007 |
|
RU2447850C2 |
| RU 2007136471 А, 10.04.2009 | |||
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| RU 2009105055 А, 20.08.2010. | |||

