ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к приводной системе транспортного средства, включающей в себя блок дифференциала с электрическим приводом и блок механической ступенчатой трансмиссии, в частности, для управления гидравликой гидравлических устройств фрикционного сцепления блока механической ступенчатой трансмиссии.
2. Описание предшествующего уровня техники
[0002] Известна приводная система транспортного средства, включающая в себя блок механической ступенчатой трансмиссии, в котором множество положений передач, имеющих различные передаточные отношения, устанавливаются в ответ на состояния сцепления/расцепления множества гидравлических устройств фрикционного сцепления (см. публикацию японской патентной заявки №11-230330 (JP 11-230330 А)). В такой приводной системе транспортного средства, гидравлические характеристики гидравлических устройств фрикционного сцепления в то время, когда гидравлические устройства фрикционного сцепления сцепляются или расцепляются, варьируются или изменяются, например, из-за индивидуальных различий, таких как изменения или старение коэффициентов трения фрикционных материалов и погрешностей измерения подвергающихся давлению участков. По этой причине в JP 11-230330 А путем определения того, действительно ли соотношение между входной частотой вращения и частотой вращения двигателя изменилось в то время, когда гидравлическое давление рассматриваемого гидравлического устройства фрикционного сцепления постепенно увеличилось в нейтральном состоянии, при этом гидравлическое давление, при котором рассматриваемое гидравлическое устройство фрикционного сцепления начинает иметь момент сцепления. Таким образом, определяется конечное давление сжатия. Конечное давление сжатия примерно соответствует гидравлическому давлению, при котором гидравлическое устройство фрикционного сцепления начинает иметь момент сцепления и, например, гидравлическому давлению непосредственно перед тем, как гидравлическое устройство фрикционного сцепления начинает иметь момент сцепления.
[0003] В этой связи, когда блок дифференциала с электрическим приводом, включающий в себя дифференциальный механизм планетарной передачи, соединенный, по меньшей мере, с двумя вращающимися машинами и двигателем, расположен между вышеописанным блоком механической ступенчатой трансмиссии и двигателем (см. публикация японской патентной заявки 2005-344850 (JP 2005-344850 А)), может оказаться невозможным надлежащим образом определить гидравлическое давление каждого из вышеописанных гидравлических устройств фрикционного сцепления. Например, в таком блоке дифференциала с электрическим приводом, если крутящий момент каждой вращающейся машины управляется с использованием обратной связи таким образом, что частота вращения двигателя, частота вращения выходного элемента (которая соответствует входной частоте вращения блока механической ступенчатой трансмиссии), и т.п. становятся заранее заданными целевыми значениями, соответствующими требуемой выходной мощности, или пр., может оказаться невозможным надлежащим образом обнаружить изменения входной частоты вращения из-за момента сцепления каждого гидравлического устройства фрикционного сцепления. Если нельзя надлежащим образом определить величины гидравлического давления таким образом, имеется вероятность того, что управление сцеплением и расцеплением гидравлических устройств фрикционного сцепления нарушается и, как следствие, ухудшается оперативность переключения, и происходит толчок при переключении.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Задачей данного изобретения является, при наличии блока дифференциала с электрическим приводом и блока механической ступенчатой трансмиссии, соответствующее определение гидравлического давления каждого гидравлического устройства фрикционного сцепления блока механической ступенчатой трансмиссии.
[0005] Устройство управления для приводной системы транспортного средства содержит: (а) блок дифференциала с электрическим приводом, включающий в себя дифференциальный механизм планетарной передачи, соединенный, по меньшей мере, с двумя вращающимися машинами и двигателем; (b) блок механической ступенчатой трансмиссии, который расположен между блоком дифференциала с электрическим приводом и ведущим колесом и устанавливает множество положений передач, имеющих различные передаточные отношения, в соответствии с включенным положением множества гидравлических устройств фрикционного сцепления; (с) блок оценки входного крутящего момента, который вычисляет расчетный входной крутящий момент блока механической ступенчатой трансмиссии на основе уравнения движения для блока дифференциала с электрическим приводом; а также (d) блок управления гидравликой, который в то время, когда транспортное средство движется в состоянии, когда установлено любое одно положение из положений передач блока механической ступенчатой трансмиссии, увеличивает гидравлическое давление одного из несцепленных гидравлических устройств фрикционного сцепления блока механической ступенчатой трансмиссии до тех пор, пока расчетный входной крутящий момент не изменится на заранее заданную величину или более.
[0006] В устройстве управления конечное давление сжатия одного из несцепленных гидравлических устройств фрикционного сцепления может определяться на основе гидравлического давления в то время, когда расчетный входной крутящий момент изменился на заранее заданную величину или более.
[0007] В устройстве управления (а) дифференциальный механизм планетарной передачи может представлять собой однорядную планетарную передачу, включающую в себя первый вращающийся элемент, соединенный с двигателем, второй вращающийся элемент, соединенный с первой вращающейся машиной, и третий вращающийся элемент, соединенный с элементом трансмиссии, (b) вторая вращающаяся машина может быть соединена с элементом трансмиссии с возможностью передачи мощности от элемента трансмиссии на блок механической ступенчатой трансмиссии, и (с) расчетный входной крутящий момент может вычисляться в соответствии с арифметическим выражением, определяемым с использованием крутящего момента первой вращающейся машины, изменения частоты вращения первой вращающейся машины, момента инерции первой вращающейся машины, крутящего момента второй вращающейся машины, изменения частоты вращения второй вращающейся машины, момента инерции второй вращающейся машины и передаточного отношения планетарной передачи.
[0008] При наличии сконфигурированного таким образом устройства управления в то время, как транспортное средство движется в состоянии, когда установлено любое одно положение из положений передач блока механической ступенчатой трансмиссии, пока не изменится расчетный входной крутящий момент, который получают из уравнения движения для блока дифференциала с электрическим приводом, гидравлическое давление одного из несцепленных гидравлических устройств фрикционного сцепления увеличивается, соответственно, можно надлежащим образом определить конечное давление сжатия на основе гидравлического давления в тот момент времени, который описан выше. То есть, когда одно из несцепленных гидравлических устройств фрикционного сцепления начинает иметь момент сцепления, момент сцепления становится сопротивлением вращению для блока механической ступенчатой трансмиссии, при этом баланс между вращающимися элементами блока дифференциала с электрическим приводом меняется в результате изменения частоты вращения из-за сопротивления вращению, при этом рабочее состояние каждой вращающейся машины меняется, и расчетный входной крутящий момент, который получают из уравнения движения, также меняется. Поэтому независимо от управления с обратной связью или т.п. вращающимися машинами можно соответствующим образом определить возникновение момента сцепления. Другими словами, путем увеличения гидравлического давления несцепленного в настоящий момент времени гидравлического устройства фрикционного сцепления и путем определения изменения выбранного параметра, которое возникает в результате изменения гидравлического давления, можно оценить влияние управления с обратной связью или т.п. Кроме того, используется гидравлическое давление несцепленного гидравлического устройства фрикционного сцепления, поэтому легкое изменение гидравлического давления не влияет на движение. Когда гидравлическое давление, например, конечное давление сжатия, определено надлежащим образом, можно надлежащим образом осуществлять управление гидравликой гидравлических устройств фрикционного сцепления, то есть управление сцеплением и расцеплением или т.п. во время переключения независимо от индивидуальных различий участков, старения фрикционных материалов или т.п.
[0009] При наличии устройства управления, когда дифференциальный механизм планетарной передачи представляет собой однорядную планетарную передачу, расчетный входной крутящий момент вычисляется в соответствии с арифметическим выражением, определяемым с использованием крутящего момента первой вращающейся машины, изменения частоты вращения первой вращающейся машины, момента инерции первой вращающейся машины, крутящего момента второй вращающейся машины, изменения частоты вращения второй вращающейся машины, момента инерции второй вращающейся машины и передаточного отношения планетарной передачи. Поэтому можно получить расчетный входной крутящий момент с высокой точностью по сравнению с тем, когда используется крутящий момент двигателя или т.п., имеющий высокую точность, и можно, например, выяснить конечное давление сжатия с высокой точностью.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] Признаки, преимущества, а также техническая и промышленная значимость примеров осуществления настоящего изобретения будут описаны ниже со ссылкой на сопровождающие чертежи, на которых одинаковые позиции обозначают одинаковые элементы, и на которых:
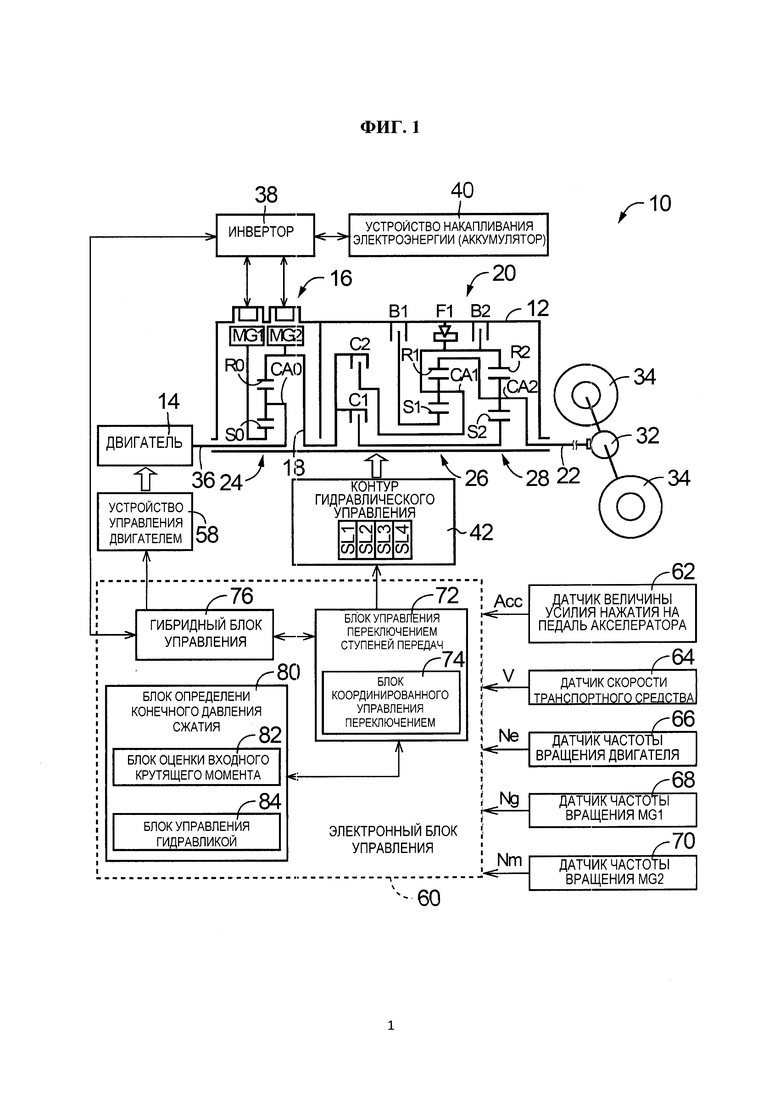
Фиг. 1 представляет собой схематичный вид, включающий систему управления приводной системой транспортного средства, на котором применено изобретение;
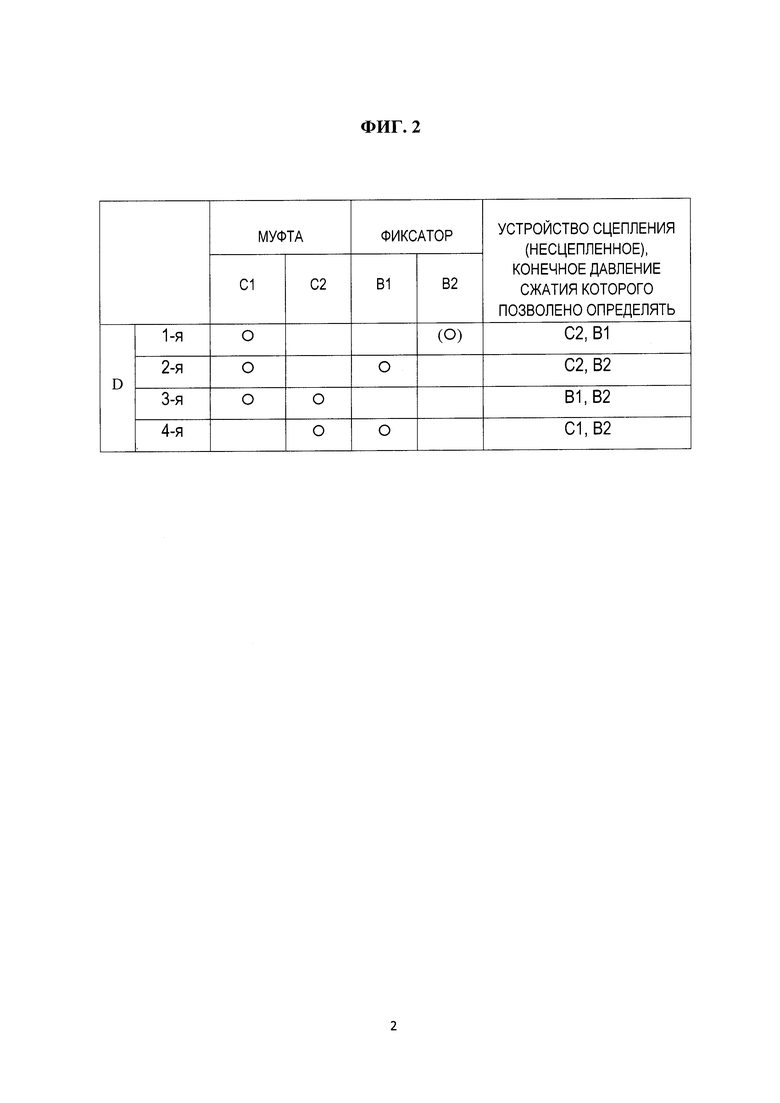
Фиг. 2 представляет собой вид, который иллюстрирует взаимосвязь между множеством положений передач блока механической ступенчатой трансмиссии, расположенного в приводной системе транспортного средства, показанной на фиг. 1, и гидравлическими устройствами фрикционного сцепления, которые устанавливают эти положения передач;
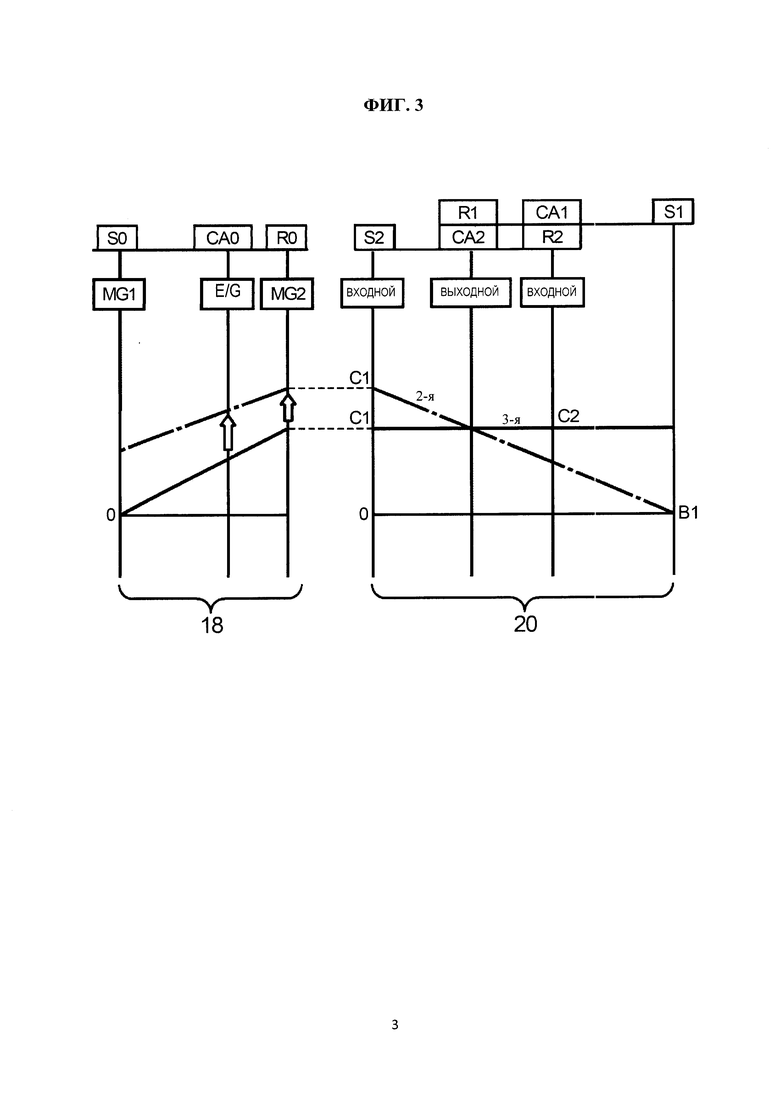
Фиг. 3 представляет собой номограмму для блока дифференциала с электрическим приводом и блока механической ступенчатой трансмиссии, которые расположены в приводной системе транспортного средства, показанной на фиг. 1, и представляет собой вид, который иллюстрирует положение второй передачи «2-я» и положение третьей передачи «3-я»;
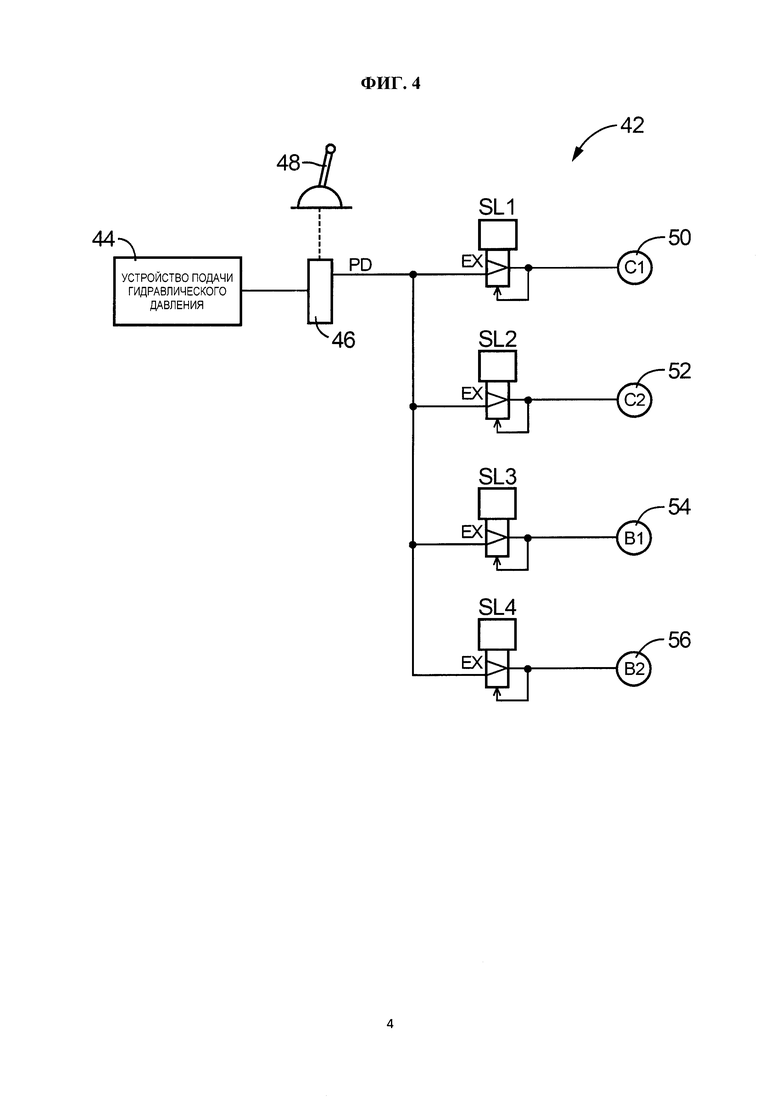
Фиг. 4 представляет собой принципиальную схему, на которой показан контур гидравлического управления, связанный с муфтами C1, С2 и тормозами B1, В2 блока механической ступенчатой трансмиссии, расположенного в приводной системе транспортного средства, показанной на фиг. 1;
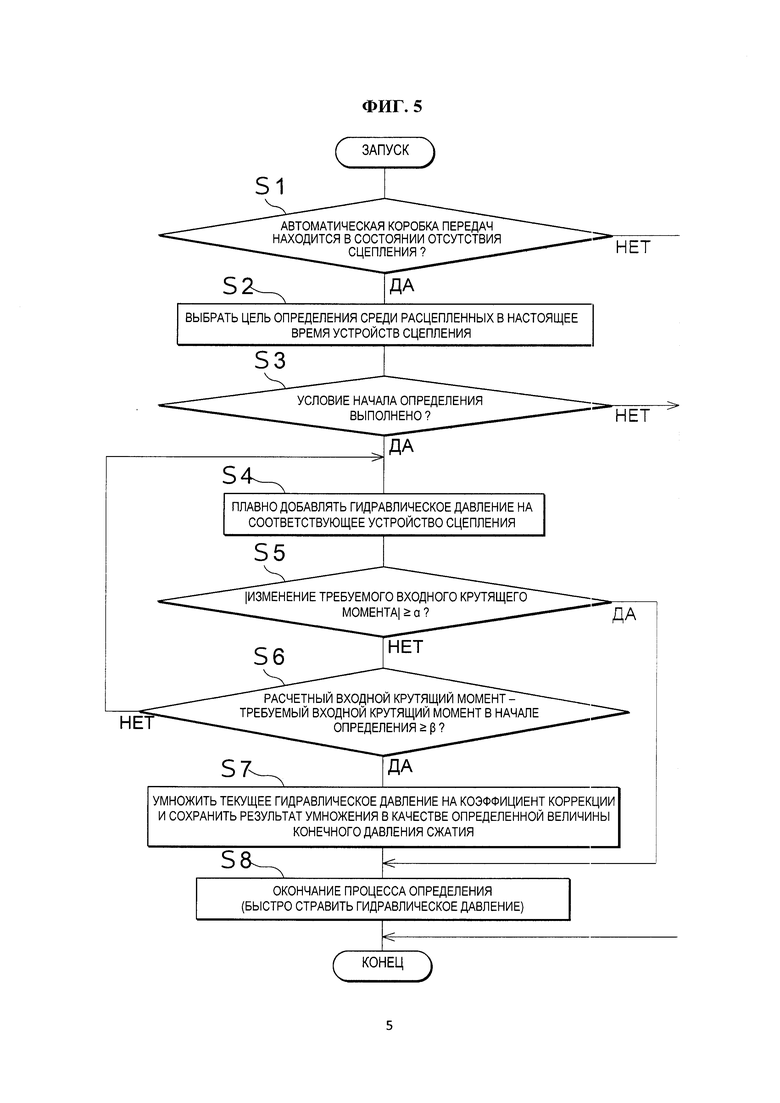
Фиг. 5 представляет собой блок-схему, на которой конкретно проиллюстрированы операции блока определения конечного давления сжатия, показанного на фиг. 1;
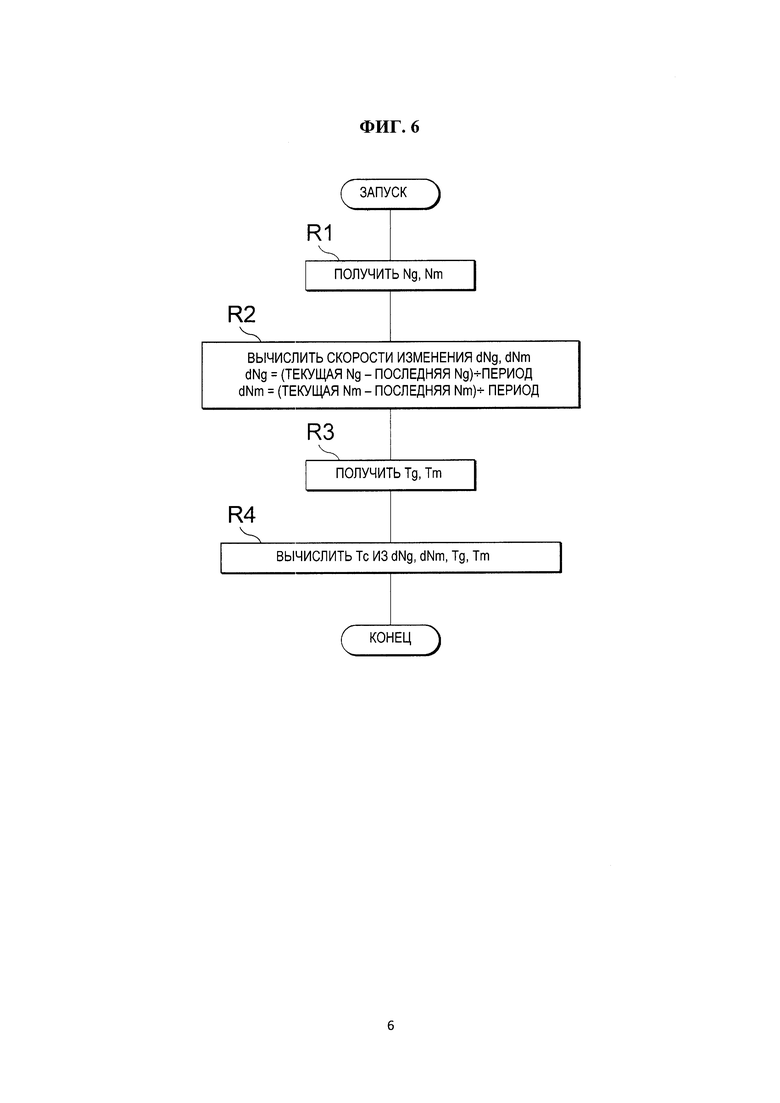
Фиг. 6 представляет собой блок-схему, на которой конкретно проиллюстрированы операции блока оценки входного крутящего момента, показанного на фиг. 1; и
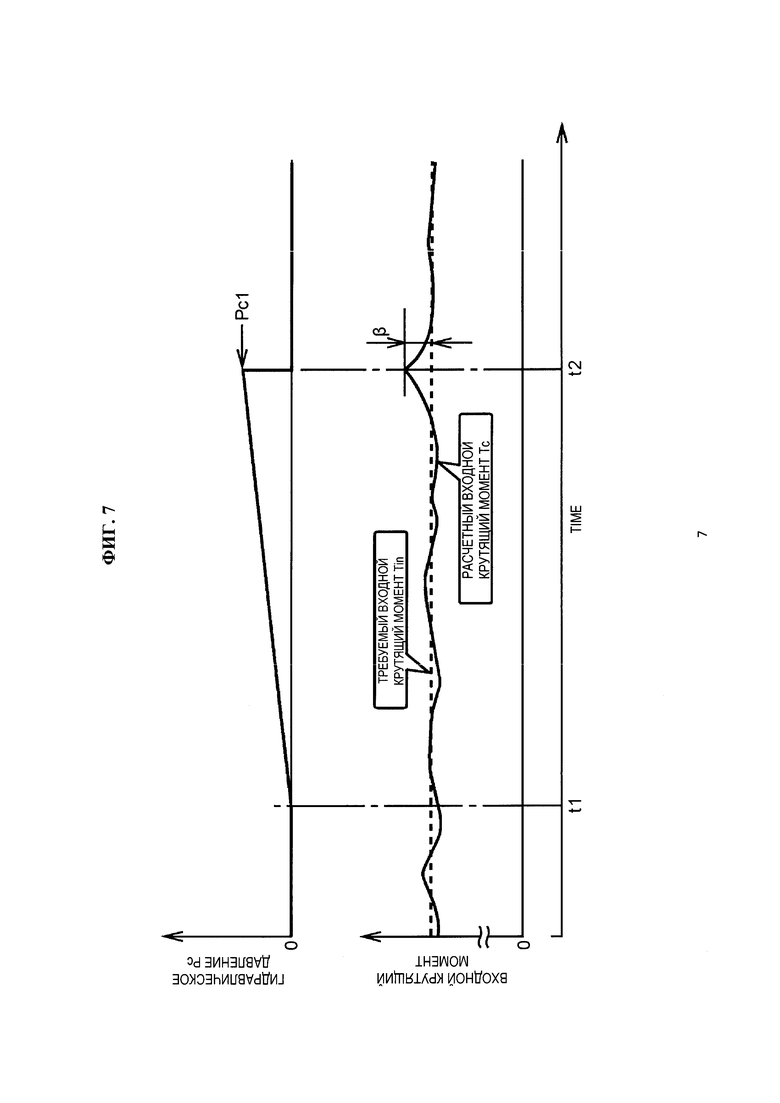
Фиг. 7 представляет собой пример временной диаграммы, на которой показаны изменения гидравлического давления и изменения входного крутящего момента в случае, когда управление определением конечного давления сжатия выполняется в соответствии с блок-схемой на фиг. 5.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0011] Однорядная планетарная передача с однорядной шестерней или двухрядной шестерней соответствующим образом используется в качестве дифференциального механизма блока дифференциала с электрическим приводом. Эта планетарная передача включает в себя три вращающихся элемента, то есть солнечную шестерню, водило и кольцевую шестерню. На номограмме, на которой частоты вращения этих вращающихся элементов соединены единой прямой линией, например, двигатель соединен с вращающимся элементом, который расположен в середине и частота вращения которого является промежуточной, при этом первая вращающаяся машина для раздельного привода и вторая вращающаяся машина для обеспечения движения транспортного средства соответственно соединены с вращающимися элементами на обоих концах. В качестве альтернативы вторая вращающаяся машина, которая представляет собой элемент трансмиссии (элемент, который соединен с блоком механической ступенчатой трансмиссии), может быть соединена со средним вращающимся элементом. Три вращающихся элемента могут являться постоянно относительно поворотными. В качестве альтернативы любые два из вращающихся элементов может быть соединены друг с другом муфтой и при этом вращаться как одно целое в качестве реакции на состояние привода. В качестве альтернативного варианта вращающийся элемент, с которым соединена первая вращающаяся машина для раздельного привода, может при вращении быть остановлен тормозом. При необходимости средства расцепления, например, муфты, могут располагаться между этими вращающимися элементами и двигателем, первой вращающейся машиной и второй вращающейся машиной. Может быть применен дифференциальный механизм, в котором множество планетарных передач скомбинированы друг с другом, и три или более вращающихся машины могут быть соединены с дифференциальным механизмом.
[0012] Каждая вращающаяся машина представляет собой вращающуюся электрическую машину, и может являться, в частности, электрическим двигателем, генератором или двигателем-генератором, способным в качестве альтернативного варианта выполнять функции и того, и другого. Генератор может применяться в качестве первой вращающейся машины для раздельного привода, а электрический двигатель может применяться в качестве второй вращающейся машины для обеспечения движения транспортного средства; однако, когда предполагаются различные состояния движения, желательно использовать двигатель-генератор в качестве и первой вращающейся машины, и второй вращающейся машины.
[0013] В качестве блока механической ступенчатой трансмиссии широко используется планетарная шестеренчатая трансмиссия или трансмиссия с параллельными валами. Определение передачи делается автоматически в ответ на состояние движения в соответствии с командой переключения водителя. Положение передачи меняется в результате сцепления или расцепления гидравлических устройств фрикционного сцепления с помощью, например, электрического переключения контура гидравлического управления. Блок механической ступенчатой трансмиссии способен, например, устанавливать множество положений передних передач. В качестве альтернативы блок механической ступенчатой трансмиссии может представлять собой устройство переключения передних/задних передач, в функцию которого входит изменение положения передачи между положением передней передачи и положением задней передачи.
[0014] Блок оценки входного крутящего момента, например, сконфигурирован для вычисления расчетного входного крутящего момента без использования крутящего момента или частоты вращения изменения двигателя, как в случае с устройством управления согласно изобретению. Однако возможно использование различных режимов. Например, можно вычислить расчетный входной крутящий момент с использованием крутящего момента или изменения частоты вращения двигателя. Блок управления гидравликой может, например, увеличивать гидравлическое давление с нуля. Вместо этого возможно применение различных режимов. Например, блок управления гидравликой может увеличивать гидравлическое давление до последнего определенного значения или значения, близкого к последнему определенному значению рабочего хода, и затем, при необходимости, дополнительно увеличить гидравлическое давление. Желательно, чтобы фактическое гидравлическое давление (значение фактического гидравлического давления) определялось датчиком гидравлического давления и определялось; однако, когда гидравлическое давление постепенно увеличивается таким образом, что фактическое гидравлическое давление является, по существу, равным командной величине гидравлического давления, можно определить гидравлическое давление с использованием командной величины гидравлического давления.
[0015] Далее пример осуществления настоящего изобретения будет описан подробно со ссылкой на прилагаемые чертежи. Фиг. 1 представляет собой схематичный вид, включающий в себя систему управления приводной системой 10 транспортного средства, на котором применено изобретение. Приводная система 10 транспортного средства включает в себя двигатель 14, блок 16 дифференциала с электрическим приводом, блок 20 механической ступенчатой трансмиссии и выходной вал 22, последовательно соединенные друг с другом и расположенные вдоль общей оси. Блок 16 дифференциала с электрическим приводом и блок 20 механической ступенчатой трансмиссии расположены внутри корпуса 12 трансмиссии (далее именуемого корпусом 12). Корпус 12 служит в качестве невращающегося элемента, соединенного с кузовом транспортного средства. Блок 16 дифференциала с электрическим приводом напрямую соединен с двигателем 14 или опосредованно соединен с двигателем 14 через демпфер гашения пульсаций (устройство гашения вибраций) (не показано) или т.п.Блок 20 механической ступенчатой трансмиссии последовательно соединен через элемент 18 трансмиссии с контуром передачи энергии от блока 16 дифференциала с электрическим приводом к ведущим колесам 34. Выходной вал 22 соединен с блоком 20 механической ступенчатой трансмиссии. Движущая сила передается от выходного вала 22 на пару ведущих колес 34 через дифференциал (главный редуктор) 32, пару осей и т.п. Приводная система 10 транспортного средства, например, соответствующим образом используется для переднерасположенного двигателя заднеприводного (FR) транспортного средства, в котором приводная система 10 транспортного средства продольно расположена в транспортном средстве. Двигатель 14 представляет собой источник движущей силы для обеспечения движения транспортного средства, и является двигателем внутреннего сгорания, например, бензиновым двигателем, и дизельным двигателем. В настоящем примере осуществления изобретения двигатель 14 напрямую соединен с блоком 16 дифференциала с электрическим приводом без применения устройства передачи текучей среды, например, преобразователя крутящего момента и гидравлической муфты.
[0016] Блок 16 дифференциала с электрическим приводом включает в себя первый двигатель-генератор MG1 для раздельного привода, дифференциальный механизм 24 и второй двигатель-генератор MG2 для обеспечения движения транспортного средства. Дифференциальный механизм 24 механически распределяет выходную мощность двигателя 14 между первым двигателем-генератором MG1 и элементом 18 трансмиссии. Второй двигатель-генератор MG2 функционально соединен с элементом 18 трансмиссии и вращается с элементом 18 трансмиссии как одно целое. И первый двигатель-генератор MG1, и второй двигатель-генератор MG2 могут в качестве альтернативного варианта использоваться как электрический двигатель или генератор. Первый двигатель-генератор MG1 соответствует первой вращающейся машине. Второй двигатель-генератор MG2 соответствует второй вращающейся машине.
[0017] Дифференциальный механизм 24 выполнен как однорядная шестеренчатая планетарная передача и включает в себя солнечную шестерню S0, водило СА0 и кольцевую шестерню R0. Водило СА0 представляет собой первый вращающийся элемент, который соединен с двигателем 14 через соединительный вал 36. Солнечная шестерня S0 представляет собой второй вращающийся элемент, который соединен с первым двигателем-генератором MG1. Кольцевая шестерня R0 представляет собой третий вращающийся элемент, который соединен с элементом 18 трансмиссии. Другими словами, на номограмме для блока 16 дифференциала с электрическим приводом, показанной с левой стороны фиг. 3, двигатель 14 соединен с водилом СА0, которое расположено посередине и частота вращения которого является промежуточной, а первый двигатель-генератор MG1 для раздельного привода и второй двигатель-генератор MG2 для обеспечения движения транспортного средства соответственно соединены с солнечной шестерней S0 и кольцевой шестерней R0, которые расположены на обоих концах. Эти солнечная шестерня S0, водило СА0 и кольцевая шестерня R0 выполнены с возможностью вращения друг относительно друга. Выходная мощность двигателя 14 распределяется между первым двигателем-генератором MG1 и элементом 18 трансмиссии. Второй двигатель-генератор MG2 приводится в действие для вращения, либо устройство накапливания электрической энергии (аккумулятор) 40 заряжается через инвертор 38 электрической энергией, полученной путем выполнения управления регенерацией (также именуемого управлением генерацией энергии) на первом двигателе-генераторе MG1. Путем управления частотой Ng вращения (частотой вращения MG1) первого двигателя-генератора MG1, то есть, частотой вращения солнечной шестерни S0, посредством управления регенерацией или управления выработкой мощности на первом двигателе-генераторе MG1 можно при необходимости менять состояние дифференциала дифференциального механизма 24 и передаточное отношение γ0 (=Ne/Nm) частоты вращения соединительного вала 36, то есть отношение частоты Ne вращения двигателя к частоте Nm вращения элемента 18 трансмиссии (частоте вращения элемента трансмиссии) постоянно меняется. То есть блок 16 дифференциала с электрическим приводом функционирует в качестве электрической бесступенчатой коробки передач. Частота Nm вращения элемента трансмиссии равна частоте вращения (частоте вращения MG2) второго двигателя-генератора MG2, таким образом, частота вращения элемента трансмиссии и частота вращения MG2 обозначаются одной ссылочной позицией Nm.
[0018] Блок 20 механической ступенчатой трансмиссии образует часть контура передачи энергии между двигателем 14 и ведущими колесами 34. Блок 20 механической ступенчатой трансмиссии представляет собой планетарную многоступенчатую коробку передач, включающую в себя первую планетарную передачу 26 с однорядной шестерней и вторую планетарную передачу 28 с однорядной шестерней. Первая планетарная передача 26 включает в себя солнечную шестерню S1, водило СА1 и кольцевую шестерню R1. Вторая планетарная передача 28 включает в себя солнечную шестерню S2, водило СА2 и кольцевую шестерню R2. Солнечная шестерня S1 селективно соединяется с корпусом 12 через первый тормоз В1. Солнечная шестерня S2 селективно соединяется с элементом 18 трансмиссии через первую муфту С1. Водило СА1 и кольцевая шестерня R2 соединены как одно целое друг с другом. Водило СА1 и кольцевая шестерня R2 селективно соединяются с элементом 18 трансмиссии через вторую муфту С2, и селективно соединяются с корпусом 12 через второй тормоз В2. Эти водило СА1 и кольцевая шестерня R2 соединены с корпусом 12 через муфту F1 одностороннего вращения. Корпус 12 представляет собой не вращающийся элемент. Эти водило СА1 и кольцевая шестерня R2 могут вращаться в том же направлении, что и двигатель 14, при этом их вращение в противоположном направлении блокируется. Кольцевая шестерня R1 и водило СА2 соединены как одно целое друг с другом и соединены как одно целое с выходным валом 22.
[0019] Блок 20 механической ступенчатой трансмиссии устанавливает множество положений передних передач, имеющих различные передаточные отношения γ (=Nm/Nout) частоты Nm вращения элемента трансмиссии к частоте Nout вращения (выходной частоте вращения) выходного вала 22 при селективном сцеплении муфт C1, С2 и тормозов B1, В2 (далее, когда нет особенных отличий друг от друга, именуемых просто муфтами С и тормозами В). Как показано в таблице операций сцепления на фиг. 2, положение первой передачи «1-я», имеющей наибольшее передаточное отношение γ, устанавливается при сцеплении первой муфты С1 и второго тормоза В2, положение второй передачи «2-я», имеющей меньшее передаточное отношение γ, чем положение первой передачи, устанавливается при сцеплении первой муфты С1 и первого тормоза В1, положение третьей передачи «3-я», имеющей передаточное отношение γ, равное 1, устанавливается при сцеплении первой муфты С1 и второй муфты С2, и положение четвертой передачи «4-я», имеющей передаточное отношение γ меньше 1, устанавливается при сцеплении второй муфты С2 и первого тормоза В1. Поскольку муфта F1 одностороннего вращения расположена параллельно со вторым тормозом В2, второму тормозу В2 нужно быть сцепленным только в случае, когда тормоз двигателя вынужден работать в состоянии движения, и муфта F1 одностороннего вращения может быть приведена в расцепленное состояние при нахождении в состоянии движения, например, при начале движения.
[0020] Каждая из муфт С и каждый из тормозов В представляет собой многодисковое или однодисковое гидравлическое устройство фрикционного сцепления, которое вступает во фрикционное сцепление с помощью гидравлического давления. Фиг. 4 представляет собой принципиальную схему, на которой показан соответствующий участок контура 42 гидравлического управления, включающего в себя линейные электромагнитные клапаны SL1-SL4, которые управляют состояниями сцепления/расцепления этих муфт С и тормозов В. Диапазон D давления PD (давления переднего диапазона) подается от устройства 44 подачи гидравлического давления через ручной клапан 46. Устройство 44 подачи гидравлического давления включает в себя механический масляный насос, электрический масляный насос или т.п. в качестве источника гидравлического давления. Механический масляный насос приводится во вращение двигателем 14. Электрический масляный насос приводится в действие электрическим двигателем, когда двигатель 14 не работает. Устройство 44 подачи гидравлического давления регулирует давление с использованием регулирующего клапана линейного давления или т.п. и затем выдает заданное гидравлическое давление (линейное давление). Ручной клапан 46 используется для механического или электрического переключения масляного канала в ответ на работу рычага 48 переключения передач, с помощью которого обеспечивается выбор диапазона D для движения вперед, диапазона R для движения назад, диапазона N для прерывания передачи мощности и пр. Когда выбран диапазон D, выдается давление PD диапазона D.
[0021] Линейные электромагнитные клапаны SL1-SL4, которые являются гидравлическими устройствами управления, надлежащим образом расположены в соответствии с гидравлическими приводами (гидроцилиндрами) 50, 52, 54, 56 муфт C1, С2 и тормозов B1, В2. Каждый из линейных электромагнитных клапанов SL1-SL4 независимо приводится в действие или выключается электронным блоком 60 управления, при этом гидравлическое давление в каждом из гидравлических приводов 50, 52, 54, 56 регулируется независимо, и состояние сцепления/расцепления каждой из муфт C1, С2 и каждого из тормозов B1, В2 управляется отдельно. Таким образом устанавливаются положения передних передач с 1ой по 4ую. При управлении переключением на блоке 20 механической ступенчатой трансмиссии, выполняется так называемое переключение «сцепление в сцепление». При переключении «сцепление в сцепление», например, состояния сцепления/расцепления любых двух муфт С и тормозов В, связанные с передачами, управляются одновременно. Например, при переключении на нижнюю передачу из положения третьей передачи «3-я» в положение второй передачи «2-я» вторая муфта С2 расцепляется, а первый тормоз В1 сцепляется, как показано в таблице операций сцепления на фиг. 2; однако, чтобы предотвратить или уменьшить толчок при переключении, переходное гидравлическое давление расцепления второй муфты С2 и переходное гидравлическое давление сцепления первого тормоза В1 регулируются в соответствии с заранее заданным шаблоном изменения и пр. Таким образом, гидравлическое давление, то есть момент сцепления, каждого из множества устройств сцепления (муфт С и тормозов В) блока 20 механической ступенчатой трансмиссии, можно независимо и постоянно управлять с помощью одного из соответствующих линейных электромагнитных клапанов SL1-SL4.
[0022] В выполненной таким образом приводной системе 10 транспортного средства в состоянии, когда блок 20 механической ступенчатой трансмиссии удерживается в любом одном из положений G передач, передаточное отношение γ0 блока 16 дифференциала с электрическим приводом меняется бесступенчатым образом. Таким образом, можно выполнять бесступенчатое переключение с заданным диапазоном передаточного отношения в каждом положении G передачи. Общее передаточное отношение γТ (= частота Ne вращения двигателя/выходная частота Nout вращения) приводной системы 10 транспортного средства представляет собой величину, получаемую путем умножения передаточного отношения γ0 блока 16 дифференциала с электрическим приводом на передаточное отношение γ блока 20 механической ступенчатой трансмиссии, и меняется бесступенчатым образом. Когда частота вращения Ng первого двигателя-генератора MG1 управляется таким образом, что передаточное отношение γ0 блока 16 дифференциала с электрическим приводом поддерживается постоянным (например, γ0=1) независимо от переключения блока 20 механической ступенчатой трансмиссии, общее передаточное отношение γТ варьируется ступенчатым образом при переключении блока 20 механической ступенчатой трансмиссии, с тем результатом, что в целом возникает ощущение, сходное со ступенчатой трансмиссией.
[0023] Фиг. 3 представляет собой номограмму, на которой показана относительная взаимосвязь, обозначенная линиями, между частотами вращения вращающихся элементов, состояние соединения которых меняется в каждом положении передачи в связи с блоком 16 дифференциала с электрическим приводом и блоком 20 механической ступенчатой трансмиссии. Интервал между смежными вертикальными линиями номограммы на фиг. 3, то есть интервал между любыми соседними двумя из трех вертикальных линий, показанных для блока 16 дифференциала с электрическим приводом, определяется в ответ на передаточное отношение ρ однорядной шестеренчатой планетарной передачи, которая образует дифференциальный механизм 24, а интервал между любыми двумя соседними из четырех вертикальных линий, показанных для блока 20 механической ступенчатой трансмиссии, определяется в ответ на передаточное отношение ρ1 первой планетарной передачи 26 и передаточное отношение ρ2 второй планетарной передачи 28. На фиг. 3 широкая сплошная линия представляет собой случай, когда положение G передачи блока 20 механической ступенчатой трансмиссии является положением третьей передачи «3-я», широкая чередующаяся штрих-пунктирная линия представляет собой случай, когда положение G передачи блока 20 механической ступенчатой трансмиссии является положением второй передачи «2-я», и в промежуток времени понижающего переключения передачи с 3-ей на 2-ю, в течение которого нажата педаль акселератора, частота вращения каждого из вращающихся элементов блока 16 дифференциала с электрическим приводом также меняется. Более конкретно, как показано открытыми стрелками на фиг. 3, не только частота Nm вращения элемента 18 трансмиссии, который является входным элементом блока 20 механической ступенчатой трансмиссии, то есть частота Nm вращения кольцевой шестерни R0, увеличивается в ответ на изменение передаточного отношения γ блока 20 механической ступенчатой трансмиссии, но и частота Ne вращения двигателя также возрастает.
[0024] Приводная система 10 транспортного средства включает в себя электронный блок 60 управления в качестве контроллера. Электронный блок 60 управления осуществляет выходное управление двигателем 14 и осуществляет управление переключением блока 16 дифференциала с электрическим приводом и блока 20 механической ступенчатой трансмиссии. Электронный блок 60 управления включает в себя так называемый микрокомпьютер. Микрокомпьютер включает в себя, например, ЦП, ПЗУ, ОЗУ, входные/выходные интерфейсы, и т.п. ЦП осуществляет обработку сигнала в соответствии с программами, предварительно загруженными в ПЗУ, и при этом используя функцию временного хранения ОЗУ. Электронный блок 60 управления при необходимости подразделяется на электронный блок управления для управления двигателем, электронный блок управления для управления передачами и т.п. Различные фрагменты данных, необходимые для управления, подаются в электронный блок 60 управления, например, от датчика 62 величины усилия нажатия на педаль акселератора, датчика 64 скорости транспортного средства, датчика 66 частоты вращения двигателя, датчика 68 частоты вращения MG1 и датчика 70 частоты вращения MG2. Различные фрагменты данных включают в себя величину Асс усилия нажатия на педаль акселератора, скорость V транспортного средства, частоту Ne вращения двигателя, частоту Ng вращения MG1 и частоту Nm вращения MG2. Скорость V транспортного средства соответствует выходной частоте Nout вращения.
[0025] Электронный блок 60 управления функционально включает в себя блок 72 управления переключением ступеней передач и гибридный блок 76 управления. Блок 72 управления переключением ступеней передач, например, определяет, нужно ли заставлять блок 20 механической ступенчатой трансмиссии переключиться в соответствии с заданной картой переключения, и пр., используя скорость V транспортного средства и требуемую выходную величину мощности, например, величину Асc усилия нажатия на педаль акселератора, в качестве параметров. При необходимости блок 72 управления переключением ступеней передач автоматически изменяет положение G передачи блока 20 механической ступенчатой трансмиссии путем изменения состояний сцепления/расцепления (сцепленного состояния) муфт С и тормозов В с помощью линейных электромагнитных клапанов SL1-SL4. Блок 72 управления переключением ступеней передач дополнительно функционально включает в себя блок 74 координированного управления переключением. Блок 74 координированного управления переключением управляет двигателем 14, первым двигателем-генератором MG1 и вторым двигателем-генератором MG2 через гибридный блок 76 управления, когда блок 20 механической ступенчатой трансмиссии вынужден переключаться. Например, во время понижающего переключения передач, например, переключения с 3-ей на 2-ю передачу, показанного на фиг. 3 (при управлении выработкой и регенерацией электроэнергии), крутящий момент второго двигателя-генератора MG2 управляется с использованием обратной связи таким образом, что частота Nm вращения элемента 18 трансмиссии становится целевой частотой Nm вращения элемента трансмиссии после переключения, которая определяется при переключении, и (при управлении выработкой и регенерацией электроэнергии) крутящий момент первого двигателя-генератора MG1 управляется с использованием обратной связи, таким образом, что частота Ne вращения двигателя становится заранее заданной целевой частотой Net вращения двигателя. То есть блок 20 механической ступенчатой трансмиссии вынужден переключаться в основном посредством управления сцеплением и расцеплением гидравлических устройств фрикционного сцепления (муфт С и тормозов В). Однако достаточная точность управления не достигается только гидравлическим управлением. Поэтому желательно управлять частотой Nm вращения элемента 18 трансмиссии, который является входным элементом, с использованием второго двигателя-генератора MG2 с высокой точностью с тем, чтобы соответствовать продвижению переключения блока 16 дифференциала с электрическим приводом.
[0026] Гибридный блок 76 управления, например, заставляет двигатель 14 работать в топливосберегающем рабочем диапазоне, и бесступенчато меняет передаточное отношение γ0 блока 16 дифференциала с электрическим приводом путем управления распределением движущей силы между двигателем 14 и вторым двигателем-генератором MG2, и противодействующей силы, вызванной генерированием электрической энергии первым двигателем-генератором MG1. Например, целевая (требуемая) выходная мощность транспортного средства вычисляется на основе величины Асс усилия нажатия на педаль акселератора, который представляет собой требуемую выходную величину усилия водителя, и скорости V транспортного средства в качестве скорости V движущегося транспортного средства в это время, при этом требуемая общая целевая выходная мощность вычисляется на основе целевой выходной мощности транспортного средства и требуемой величины зарядки, а требуемый входной крутящий момент Tin блока 20 механической ступенчатой трансмиссии получают в ответ на передаточное отношение γ или т.п. при положении G передачи блока 20 механической ступенчатой трансмиссии таким образом, что получают общую целевую выходную мощность. Кроме того, при дальнейшем учете участия крутящего момента и пр. второго двигателя-генератора MG2, вычисляется целевая выходная мощность двигателя (требуемая выходная мощность двигателя), при этом получают требуемый входной крутящий момент Tin. Осуществляется управление двигателем 14, и величина электрической энергии (регенерируемый крутящий момент), вырабатываемый первым двигателем-генератором MG1, управляется с использованием обратной связи таким образом, что получают частоту Ne вращения двигателя и крутящий момент Те двигателя, которые обеспечивают целевую выходную мощность двигателя. Например, в режиме автоматического управления движением или т.п., который поддерживает скорость V транспортного средства постоянной, требуемый входной крутящий момент Tin управляется с использованием обратной связи, и крутящий момент как двигателя 14, так и первого двигателя-генератора MG1 и второго двигателя-генератора MG2 управляются таким образом, что частота Nm вращения элемента трансмиссии поддерживается равной заданной частоте вращения. Выходное управление двигателем 14, например, осуществляется через устройство 58 управления двигателем, включающим в себя электронный дроссельный клапан, устройство впрыска топлива, устройство зажигания и т.п. Электронный дроссельный клапан регулирует количество всасываемого воздуха. Устройство впрыска топлива регулирует величину впрыска топлива. Устройство зажигания может выполнять управление опережением/задержкой зажигания. Управление выработкой электрической энергии и управление регенерацией как первого двигателя-генератора MG1, так и второго двигателя-генератора MG2 осуществляется в то время, когда выполняется управление зарядкой и разрядкой на устройстве 40 накапливания электрической энергии через инвертор 38.
[0027] Электронный блок 60 управления дополнительно функционально включает в себя блок 80 определения конечного давления сжатия. Блок 80 определения конечного давления сжатия определяет конечное давление сжатия именно до того, как каждое из множества гидравлических устройств фрикционного сцепления (муфты С и тормоза В) блока 20 механической ступенчатой трансмиссии начинает иметь момент сцепления. То есть каждый из гидравлических приводов 50, 52, 54, 56 включает в себя возвратную пружину. Каждый из гидравлических приводов 50, 52, 54, 56 генерирует момент сцепления, когда фрикционные материалы вступают во фрикционное сцепление друг с другом в результате движения поршня против силы прижимания возвратной пружины. Гидравлическое давление именно перед тем, как каждый из гидравлических приводов 50, 52, 54, 56 начинает иметь момент сцепления, представляет собой конечное давление сжатия. Например, когда гидравлические устройства фрикционного сцепления (муфты С и тормоза В) расцепляются с помощью управления нейтралью, можно обеспечить быстрое сцепление гидравлических устройств фрикционного сцепления для генерирования движущей силы во время отмены управления нейтралью путем поддержания гидравлического давления каждого из гидравлических устройств фрикционного сцепления равным соответствующему конечному давлению сжатия. С другой стороны, конечное давление сжатия варьируется или изменяется в зависимости от вариаций или старения в соответствии с коэффициентом трения между фрикционными материалами, индивидуальными различиями, такими как размерная погрешность участка, на который воздействует давление, изменений или старения в соответствии с пружинным усилием между возвратными пружинами и т.п., при этом конечное давление сжатия определяется в заранее заданное время блоком 80 определения конечного давления сжатия.
[0028] Блок 80 определения конечного давления сжатия функционально включает в себя блок 82 оценки входного крутящего момента и блок 84 управления гидравликой. Блок 80 определения конечного давления сжатия осуществляет обработку сигнала в соответствии с этапами S1-S8 (далее именуемыми просто S1-S8) блок-схемы, показанной на фиг. 5. Этапы S4-S6 на фиг. 5 соответствуют блоку 84 управления гидравликой. Блок 82 оценки входного крутящего момента вычисляет расчетный входной крутящий момент Тс на основе уравнения движения блока 16 дифференциала с электрическим приводом путем осуществления обработки сигнала в соответствии с этапами R1-R4 (далее именуемыми просто R1-R4) блок-схемы, показанной на фиг. 6. Расчетный входной крутящий момент Тс представляет собой расчетное значение входного крутящего момента, которое выдается от блока 16 дифференциала с электрическим приводом на блок 20 механической ступенчатой трансмиссии.
[0029] На этапе S1 фиг. 5 определяется, действительно ли блок 20 механической ступенчатой трансмиссии находится в состоянии отсутствия переключения, то есть движется ли транспортное средство в диапазоне D, в котором установлено одно из положений G переключения. Процесс заканчивается непосредственно тогда, когда блок 20 механической ступенчатой трансмиссии переключается; при этом, когда блок 20 механической ступенчатой трансмиссии не переключается, выполняется этап S2, и цель определения выбирается среди расцепленных в настоящее время гидравлических устройств фрикционного сцепления. Эта цель определения представляет собой одно из несзацепленных устройств фрикционного сцепления, показанных в правом крайнем столбце таблицы операций сцепления, представленной на фиг. 2. В то время, когда транспортное средство движется в положении первой передачи «1-я», выбирается либо вторая муфта С2, либо первый тормоз В1. Когда транспортное средство движется в положении второй передачи «2-я», выбирается либо вторая муфта С2, либо второй тормоз В2. Когда транспортное средство движется в положении третьей передачи «3-я», выбирается либо первый тормоз В1, либо второй тормоз В2. Когда транспортное средство движется в положении четвертой передачи «4-я», выбирается либо первая муфта СТ, либо второй тормоз В2. Имеется два кандидата в любом положении передачи, и выбор может производиться, например, поочередно.
[0030] На следующем этапе S3 определяется, действительно ли выполнено заранее заданное условие начала определения. Когда заранее заданное условие начала определения не выполнено, процесс сразу же заканчивается; при этом, когда заранее заданное условие начала определения выполнено, процесс определения гидравлического давления с этапа S4 выполняется. Условием начала определения является, например, условие устойчивого движения, при котором степень открытия дроссельного клапана, соответствующая объему всасываемого воздуха, скорости V транспортного средства и т.п., является, по существу, постоянной, условие, что число операций переключения с последнего выполнения определения, дистанция пробега или т.п. превышает установленное значение, определенное заранее, или т.п. На этапе S4 гидравлическое давление Рс плавно подается на соответствующее гидравлическое устройство фрикционного сцепления. Фиг. 7 представляет собой пример временной диаграммы, на которой показаны изменения гидравлического давления Рс соответствующего гидравлического устройства фрикционного сцепления, расчетный входной крутящий момент Тс (сплошная линия) и требуемый входной крутящий момент Tin (пунктирная линия) в случае, когда процесс определения гидравлического давления выполняется на этапе S4. Момент t1 времени является моментом времени, в который на этапе S3 делается утвердительное определение и начинается процесс определения гидравлического давления. Гидравлическое давление Рс плавно возрастает с постоянной скоростью изменения. Гидравлическое давление Рс на фиг. 7 представляет собой командную величину гидравлического давления; однако изменение является относительно небольшим, соответственно, можно считать, что гидравлическое давление Рс является, по существу, таким же, что и фактическое гидравлическое давление (текущее гидравлическое давление). Однако можно определять фактическое гидравлическое давление с использованием датчика гидравлического давления или т.п. По отношению к значению конечного давления сжатия, определенному в текущий момент времени, гидравлическое давление может возрастать до конечного давления сжатия или величины гидравлического давления, которая слегка меньше конечного давления сжатия рабочего хода, и затем может плавно возрастать с постоянной скоростью изменения.
[0031] На этапе S5 определяется, действительно ли абсолютная величина изменений требуемого входного крутящего момента Tin больше или равна заранее заданной величине α определения. Когда абсолютная величина изменений требуемого входного крутящего момента Tin больше или равна заранее заданной величине α определения, имеется вероятность ошибочного определения из-за большого изменения движущей силы, при этом процесс немедленно переходит на этап S8, быстро стравливает гидравлическое давление Рс, и заканчивает процесс определения гидравлического давления. Требуемый входной крутящий момент Tin представляет собой требуемый входной крутящий момент блока 20 механической ступенчатой трансмиссии, вычисляемый при реакции на передаточное отношение γ положения G передачи блока 20 механической ступенчатой трансмиссии или т.п., при этом получают общую целевую выходную мощность, которую получают на основе величины Асс усилия нажатия на педаль акселератора, скорости V транспортного средства и т.п. Требуемый входной крутящий момент Tin представляет собой величину, вычисляемую гибридным блоком 76 управления в ходе управления двигателем 14, первым двигателем-генератором MG1 и вторым двигателем-генератором MG2. Большое изменение требуемого входного крутящего момента Tin означает большое изменение движущей силы. Например, разница ΔTin между требуемым входным крутящим моментом Tin1 и текущим значением Tin в начале процесса определения гидравлического давления (момент t1 времени на фиг. 7) вычисляется как величина изменения, и определяется, действительно ли абсолютное значение величины изменения больше или равно величине α определения. Постоянная величина, например, заранее определяется как величина α определения. Процесс этапа S5 может быть опущен, и этап S6 может постоянно выполняться вслед за этапом S4.
[0032] Когда на этапе S5 делается отрицательное определение, затем выполняется этап S6. На этапе S6 определяется, действительно ли разница (Тс - Tin1) между расчетным входным крутящим моментом Тс и требуемым входным крутящим моментом Tin1 в начале определения больше заданной величины α определения или равна ей. Расчетный входной крутящий момент Тс вычисляется в соответствии с блок-схемой на фиг. 6 блоком 82 оценки входного крутящего момента. На этапе R1 определяют частоту Ng вращения MG1 и частоту Nm вращения MG2. На этапе R2 частоты dNg, dNm вращения изменения (значения разницы) вычисляют на основе величины изменения частоты Ng вращения MG1 (разницы между текущим значением и последним значением), величины изменения частоты Nm вращения MG2 (разницы между текущим значением и последним значением) и выбранного периода. На этапе R3 получают крутящий момент (крутящий момент MG1) Tg первого двигателя-генератора MG1 и крутящий момент (крутящий момент MG2) Tm второго двигателя-генератора MG2. Например, командные величины крутящего момента (текущие величины или т.п.) для первого двигателя-генератора MG1 и второго двигателя-генератора MG2 считываются в качестве крутящего момента Tg MG1 и крутящего момента Tm MG2. На этапе R4 расчетный входной крутящий момент Тс вычисляется в соответствии со следующим заданным математическим выражением (1) с использованием изменения частоты dNg вращения MG1, изменения частоты dNm вращения MG2, крутящего момента Tg MG1 и крутящего момента Tm MG2 в качестве этих параметров. Расчетные величины используются для момента инерции Ig MG1, момент инерции Im MG2 и передаточного отношения ρ дифференциального механизма 24. Это математическое выражение (1) определяется на основе уравнений движения для блока 16 дифференциала с электрическим приводом, показанных в последующих математических выражениях (2)-(5), и в частности, математическое выражение (1) получается путем замены значения Тх в математическом выражении (4) математическим выражением (3).





Здесь Ig обозначает момент инерции MG1, Im обозначает момент инерции MG2, Ie обозначает момент инерции двигателя, Tg обозначает крутящий момент MG1, Tm обозначает крутящий момент MG2, Те обозначает крутящий момент двигателя, Тх обозначает распределение крутящего момента, dNg обозначает изменение частоты вращения MG1, dNm обозначает изменение частоты вращения MG2, dNe обозначает изменение частоты вращения двигателя, ρ обозначает передаточное отношение дифференциального механизма, и Тс обозначает расчетный входной крутящий момент.
[0033] Когда на этапе S6 на фиг. 5 делается отрицательное определение, то есть когда разница (Тс-Tin1) между расчетным входным крутящим моментом Тс и требуемым входным крутящим моментом Tin1 в начале определения меньше величины β определения, соответствующее гидравлическое устройство фрикционного сцепления еще не имеет крутящего момента сцепления, при этом гидравлическое давление Рс постепенно возрастает при повторении процесса этапа S4. С другой стороны, когда разница (Тс-Tin1) становится больше величины β определения или равна ей, считается, что соответствующее гидравлическое устройство фрикционного сцепления начало иметь момент сцепления, при этом выполняется процесс этапа S7, и конечное давление сжатия определяется на основе гидравлического давления Pc1 в это время. То есть когда соответствующее гидравлическое устройство фрикционного сцепления начинает иметь момент сцепления, момент сцепления становится сопротивлением вращению для блока 20 механической ступенчатой трансмиссии, и уменьшает частоту Nm вращения элемента трансмиссии, которая является входной частотой вращения блока 20 механической ступенчатой трансмиссии и частотой Ne вращения двигателя, с тем результатом, что расчетный входной крутящий момент Тс, который получают из математического выражения (1) с использованием значений дифференциалов (скоростей изменения) частот вращения для частоты Nm вращения элемента трансмиссии и частоты Ne вращения двигателя, возрастает. Гидравлическое давление Pc1 представляет собой гидравлическое давление, достигающее такой величины, при которой несцепленное гидравлическое устройство фрикционного сцепления начинает иметь момент сцепления, при этом гидравлическое давление Pc1 не влияет на движение. Момент t2 времени на фиг. 7 представляет собой момент времени, в который разница (Тс-Tin1) становится больше величины β определения или равна ей, и утвердительное определение делается на этапе S6. Например, постоянная величина определяется заранее для каждого из множества гидравлических устройств фрикционного сцепления в качестве величины β определения. Вместо этого, общая постоянная величина может определяться для всех гидравлических устройств фрикционного сцепления. Можно определить, действительно ли гидравлическое устройство фрикционного сцепления начало иметь момент сцепления на основе того, что вместо разницы между расчетным входным крутящим моментом Тс и требуемым входным крутящим моментом Tin1 в начале определения используется разница (Тс-Tin) между расчетным входным крутящим моментом Тс и текущим требуемым входным крутящим моментом Tin, которая должна быть больше величины β определения или равна ей. Когда процесс определения гидравлического давления выполняется в то время, когда транспортное средство движется в устойчивом состоянии, где объем всасываемого воздуха, например, степень открытия дроссельного клапана, и скорость V транспортного средства являются, по существу, постоянными, можно определить, действительно ли гидравлическое устройство фрикционного сцепления начало иметь крутящий момент сцепления на основе того, что величина изменения расчетного входного крутящего момента Тс, например, величина изменения текущего значения Тс по отношению к расчетному входному крутящему моменту Tc1 в начале определения больше величине β определения или равна ей.
[0034] При определении на этапе S7 может определяться (обновленное и сохраненное) в качестве конечного давления сжатия гидравлическое давление Pc1 в то время, когда на этапе S6 делается утвердительное определение, или величина гидравлического давления, которая слегка меньше, чем гидравлическое давление Pc1. Однако в настоящем примере осуществления изобретения для предотвращения возникновения неустойчивых оборотов новое конечное давление сжатия (величина, полученная при определении) получают путем сложения величины, полученной при умножении разницы последнего конечного давления сжатия (величины, полученной при определении) на коэффициент коррекции (например, 0,6 и пр.), с последним конечным давлением сжатия с последующим сохранением. После этого выполняется этап S8, и гидравлическое давление Рс быстро стравливается, после чего процедура определения гидравлического давления заканчивается.
[0035] Таким образом, при наличии приводной системы 10 транспортного средства согласно настоящему примеру осуществления изобретения в то время, как транспортное средство движется в состоянии, когда установлено одно из положений переключения блока 20 механической ступенчатой трансмиссии до изменения расчетного входного крутящего момента Тс, который получают из уравнения движения для блока 16 дифференциала с электрическим приводом, гидравлическое давление Рс несцепленного соответствующего гидравлического устройства фрикционного сцепления возрастает, и конечное давление сжатия определяется на основе гидравлического давления Pc1 в этот момент времени. Поэтому независимо от управления с обратной связью и пр. на двигателях-генераторах MG1, MG2 блока 16 дифференциала с электрическим приводом можно надлежащим образом определить конечное давление сжатия. Таким образом, независимо от индивидуальных отличий участков, старения фрикционных материалов и пр. можно надлежащим образом осуществлять гидравлическое управление гидравлическими устройствами фрикционного сцепления (муфтами С и тормозами В), то есть управление сцеплением и расцеплением и пр. во время переключения.
[0036] Поскольку расчетный входной крутящий момент Тс вычисляется в соответствии с арифметическим выражением (1), определяемым с использованием крутящего момента Tg MG1, изменения частоты dNg вращения я MG1, момента инерции Ig MG1, крутящего момента Tm MG2, изменения частоты dNm вращения MG2, момента инерции Im MG2 и передаточного отношения ρ дифференциального механизма 24, можно с высокой точностью получить расчетный входной крутящий момент Тс по сравнению со случаем, когда используется крутящий момент Те двигателя, имеющий небольшую точность, при этом можно определить конечное давление сжатия с высокой точностью.
[0037] Пример осуществления изобретения описан подробно со ссылкой на прилагаемые чертежи; однако пример осуществления изобретения является иллюстративным. Изобретение может быть реализовано в режимах, включающих в себя различные модификации или усовершенствования на основе знаний, известных специалистам в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПЕРЕДАЧИ МОЩНОСТИ | 2017 |
|
RU2651953C1 |
| КОНТРОЛЛЕР ДЛЯ АВТОМОБИЛЯ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2673323C1 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ГИБРИДНЫМ АВТОМОБИЛЕМ | 2017 |
|
RU2675484C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2677425C1 |
| ГИБРИДНОЕ ПРИВОДНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2007 |
|
RU2410250C2 |
| Устройство управления для транспортного средства с электрическим приводом | 2016 |
|
RU2655575C2 |
| УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ДЛЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИИ | 2012 |
|
RU2555374C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2606158C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2671115C1 |
Изобретение относится к приводной системе транспортного средства. Устройство управления приводной системой транспортного средства, содержащего блок дифференциала с электрическим приводом и блок механической ступенчатой трансмиссии, содержит блок оценки входного крутящего момента, который вычисляет расчетный входной крутящий момент блока механической ступенчатой трансмиссии на основе уравнения движения для блока дифференциала с электрическим приводом. Также имеется блок управления гидравликой, который в то время, когда транспортное средство движется в состоянии, когда установлено одно из положений передач блока механической ступенчатой трансмиссии, увеличивает гидравлическое давление одного из не сцепленных гидравлических устройств фрикционного сцепления блока трансмиссии. Давление увеличивается до тех пор, пока расчетный входной крутящий момент не изменится на заранее заданную величину или более. Определяется давление каждого гидравлического устройства. 2 з.п. ф-лы, 7 ил.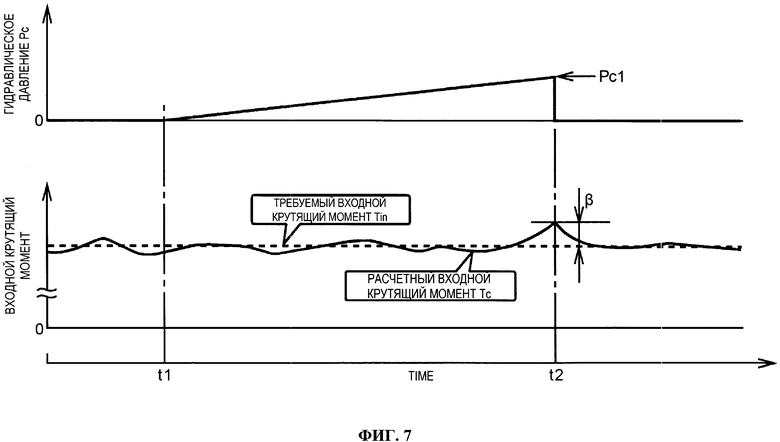
1. Устройство управления приводной системой транспортного средства, содержащего:
блок дифференциала с электрическим приводом, включающий в себя дифференциальный механизм планетарной передачи, соединенный, по меньшей мере, с двумя вращающимися машинами и двигателем;
блок механической ступенчатой трансмиссии, который расположен между блоком дифференциала с электрическим приводом и ведущим колесом и который устанавливает множество положений передач, имеющих различные передаточные отношения, в ответ на сцепленное состояние множества гидравлических устройств фрикционного сцепления;
содержащее
блок оценки входного крутящего момента, который вычисляет расчетный входной крутящий момент блока механической ступенчатой трансмиссии на основе уравнения движения для блока дифференциала с электрическим приводом; и
блок управления гидравликой, который в то время, когда транспортное средство движется в состоянии, когда установлено одно из положений передач блока механической ступенчатой трансмиссии, увеличивает гидравлическое давление одного из несцепленных гидравлических устройств фрикционного сцепления блока механической ступенчатой трансмиссии до тех пор, пока расчетный входной крутящий момент не изменится на заранее заданную величину или более.
2. Устройство управления по п. 1, в котором
конечное давление сжатия одного из несцепленных гидравлических устройств фрикционного сцепления определяется на основе гидравлического давления в то время, когда расчетный входной крутящий момент изменился на заранее заданную величину или более.
3. Устройство управления по п. 1 или 2, в котором
дифференциальный механизм планетарной передачи представляет собой однорядную планетарную передачу, включающую в себя первый вращающийся элемент, соединенный с двигателем, второй вращающийся элемент, соединенный с первой вращающейся машиной, и третий вращающийся элемент, соединенный с элементом трансмиссии,
вторая вращающаяся машина соединена с элементом трансмиссии с возможностью передачи мощности от элемента трансмиссии на блок механической ступенчатой трансмиссии и
расчетный входной крутящий момент вычисляется в соответствии с арифметическим выражением, определяемым с использованием крутящего момента первой вращающейся машины, изменения частоты вращения первой вращающейся машины, момента инерции первой вращающейся машины, крутящего момента второй вращающейся машины, изменения частоты вращения второй вращающейся машины, момента инерции второй вращающейся машины и передаточного отношения планетарной передачи.
| JP H11230330 A, 27.08.1999 | |||
| US 2008234914 A1, 25.09.2008 | |||
| СПОСОБ БАКТЕРИАЛЬНОГО ОКИСЛЕНИЯ СУЛЬФИДНЫХ ЗОЛОТОСОДЕРЖАЩИХ КОНЦЕНТРАТОВ | 2010 |
|
RU2423537C1 |
| US 2007010926 A1, 11.01.2007 | |||
| US 2005187070 A1, 25.08.2005 | |||
| US 2009248265 A1, 01.10.2009. | |||

