ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству определения полости, способу определения полости и компьютерной программе определения полости для определения полости в объекте.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
US 6272371 B1 раскрывает инвазивное зондирующее устройство, содержащее гибкий, вытянутый зонд для вставки в тело субъекта. Дальний фрагмент, примыкающий к дальнему концу зонда, имеет предварительно определенную, изогнутую форму, когда усилие прилагается к нему. Устройство дополнительно содержит первый и второй датчики, которые прикрепляются к дальнему фрагменту зона в известных позициях относительно дальнего конца и которые формируют сигналы в ответ на изгибание зонда. Схема обработки сигнала принимает реагирующие на изгиб сигналы и обрабатывает их, чтобы находить координаты позиции и ориентации, по меньшей мере, первого датчика и чтобы определять местоположения множества точек по длине дальнего фрагмента зонда.
US 2009/0076476 A1 раскрывает медицинскую инструментальную систему, содержащую вытянутый инструмент, соединенный с приводом инструмента, который выполнен с возможностью манипулировать дальним конечным фрагментом инструмента в ответ на управляющие сигналы, сформированные контроллером. Датчик усилия ассоциируется с инструментом, при этом датчик усилия формирует сигналы усилия в ответ на усилие, приложенное к дальнему конечному фрагменту инструмента. Система определения позиции формирует позиционные данные, указывающие позицию дальнего конечного фрагмента инструмента, а процессор обрабатывает соответствующие сигналы усилия и позиционные данные, чтобы формировать геометрическое воспроизведение внутренней поверхности ткани тела на основе, по меньшей мере, частично, обнаруженных усилий, приложенных к дальнему концу инструмента, когда он маневрирует во внутренней области тела, содержащей поверхность тела.
US 2011/0137153 A1 раскрывает, что принимаются входныеданные, измеренные посредством зонда в соответствующих местоположениях в полости тела субъекта, при этом в каждом из соответствующих местоположений измеряется соответствующее качество соприкосновения между зондом и тканью в полости тела, входные данные, для которых соответствующее качество соприкосновения находится за пределами заданного диапазона, отвергаются, и карта полости тела создается с помощью входных данных, которые не были отвергнуты.
US 2003/0231789 A1 раскрывает измерение электрической активности внутренней поверхности сердца во множестве точек на сердечной ткани, при этом позиции множества точек определяются с помощью датчиков местоположения, прикрепленных к устройству, и при этом определенные позиции множества точек и измеренная электрическая активность используются для формирования электроанатомической карты.
US 5738096 раскрывает составление карты механического движения сердечной мышцы с помощью катетера, имеющего датчик позиции рядом со своим дальним концом, при этом катетер перемещается в различные местоположения в сердце, и в каждом местоположении катетер помещается в соприкосновение со стенкой сердца, и позиция дальнего конца катетера определяется.
US 2010/0268059 A1 раскрывает систему абляции для абляции сердечной ткани. Система содержит абляционный катетер с электромагнитным датчиком локализации, расположенным близко к наконечнику абляционного катетера. Наконечник катетера перемещается в различные местоположения на внутренней стенке сердца, при этом в каждом местоположении позиция наконечника определяется с помощью датчика локализации. Получающийся в результате набор определенных позиций используется для реконструкции внутренней полости сердца.
Поскольку в приемлемое время может быть определено только несколько различных позиций наконечника абляционного катетера в полости, реконструированная полость, которая определяется на основе только этих нескольких местоположений наконечника абляционного катетера, имеет исключительно плохое качество.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предоставление устройства определения полости, способа определения полости и компьютерной программы определения полости для определения полости в объекте, которые предоставляют возможность определения полости в объекте с улучшенным качеством в относительно короткое время.
В первом аспекте настоящего изобретения представляется устройство определения полости для определения полости в объекте, при этом устройство содержит:
- вводимый элемент для введения в полость, при этом вводимый элемент содержит сгибаемый сегмент для размещения в полости в различных расположениях,
- модуль определения изгиба для определения изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях,
- модуль реконструкции полости для реконструкции полости на основе определенных изгибов.
Поскольку получаются не только единственные местоположения в полости, но и изгибы, заданные посредством сгибаемого сегмента в полости в различных расположениях, большой объем пространственной информации может быть получено очень быстро. Это предоставляет возможность реконструкции полости с улучшенным качеством в относительно короткое время.
Определенный изгиб, заданный посредством сгибаемого сегмента в полости в соответствующем расположении, может рассматриваться как одномерная линия, описывающая форму, ориентацию и местоположение сгибаемого сегмента в полости в соответствующем расположении. Определенный изгиб может, следовательно, рассматриваться как описывающий пространственный диапазон сгибаемого сегмента в полости в различных расположениях.
Вводимый элемент предпочтительно является катетером, в частности, абляционным катетером для абляции внутренней стенки полости. Предпочтительно, полость является полостью сердца живого существа, и абляционный катетер выполнен с возможностью подвергать абляции сердечную ткань.
В варианте осуществления модуль восстановления полости выполнен с возможностью реконструировать полость так, что определенные изгибы, ограниченные сгибаемым сегментом в различных расположениях, находятся в реконструированной полости. Кроме того, по меньшей мере, в некоторых из различных расположений сгибаемый сегмент может быть в соприкосновении с внутренней стенкой полости так, что изгибы задают соприкасающиеся изгибы, при этом модуль реконструкции полости может быть выполнен с возможностью реконструировать полость в зависимости от соприкасающихся изгибов. В частности, модуль реконструкции полости может быть выполнен с возможностью реконструировать полость так, что стенки реконструированной полости соответствуют соприкасающимся изгибам. Например, модуль реконструкции полости может быть выполнен с возможностью реконструировать полость так, что стенки реконструированной полости идут через соприкасающиеся изгибы и/или окружают соприкасающиеся изгибы. Это предоставляет возможность достоверной реконструкции полости на основе соприкасающихся изгибов.
В предпочтительном варианте осуществления вводимый элемент содержит, по меньшей мере, два электрода, между которыми располагается сгибаемый сегмент, при этом устройство содержит модуль определения соприкосновения, который электрически соединяется, по меньшей мере, с двумя электродами, для определения информации о соприкосновении, указывающей, находится ли сгибаемый сегмент в соприкосновении с внутренней стенкой полости, на основе электрических сигналов, принятых от электродов, при этом модуль реконструкции полости выполнен с возможностью определять, являются ли определенные изгибы соприкасающимися изгибами, в зависимости от информации о соприкосновении. Модуль определения соприкосновения предпочтительно выполнен с возможностью определять, что сгибаемый сегмент находится в соприкосновении с внутренней стенкой полости, если электрические сигналы, принятые от электродов, указывают, что электроды находятся в соприкосновении с внутренней стенкой. Это предоставляет возможность устройству надежно определять, находится ли сгибаемый сегмент в соприкосновении с внутренней стенкой полости или нет в соответствующем расположении, так что соприкасающиеся изгибы могут быть надежно определены.
В некоторых из различных расположений сгибаемый сегмент может не быть в соприкосновении с внутренней стенкой полости, так что изгибы, заданные посредством сгибаемого сегмента, не являются соприкасающимися изгибами, при этом модуль реконструкции полости может быть выполнен с возможностью реконструировать полость в зависимости от соприкасающихся изгибов и в зависимости от несоприкасающихся изгибов. Модуль реконструкции полости может быть выполнен с возможностью реконструировать полость так, что несоприкасающиеся изгибы находятся в реконструированной полости. Учет также несоприкасающихся изгибов, во время реконструкции полости, может дополнительно улучшать качество реконструкции.
Модуль реконструкции полости может также быть выполнен с возможностью определять, являются ли определенные изгибы несоприкасающимися изгибами, в зависимости от информации о соприкосновении, предоставленной посредством модуля определения соприкосновения. По меньшей мере, два электрода и модуль определения соприкосновения, следовательно, могут также быть использованы, чтобы достоверно определять несоприкасающиеся изгибы, которые могут быть использованы вместе с соприкасающимися изгибами для реконструкции полости.
В варианте осуществления модуль реконструкции полости выполнен с возможностью предоставлять адаптируемую модель полости и адаптировать модель полости к определенным изгибам, заданным посредством сгибаемого сегмента в различных расположениях для реконструкции полости. Модель подлости может быть обобщенной моделью или характерной для объекта моделью, в частности, характерной для пациента моделью. Она предпочтительно является анатомической моделью. Модель полости, например, является моделью полости сердца живого существа, которая адаптируется, например, к соприкасающимся изгибам. Использование модели полости может дополнительно улучшать качество реконструкции полости.
Модель полости может быть адаптирована так, что определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, находятся в модели полости, т.е., так, что определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, охватываются адаптированной моделью полости. Если, по меньшей мере, некоторые из определенных изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях, формируют соприкасающиеся изгибы, модель полости может быть адаптирована к этим соприкасающимся изгибам, так что соприкасающиеся изгибы соответствуют внешней поверхности модели полости. Если, по меньшей мере, некоторые из определенных изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях, не являются соприкасающимися изгибами, модель полости может быть адаптирована, чтобы охватывать эти определенные изгибы. Модель полости может рассматриваться в качестве упорядочения, которое может быть использовано, чтобы реконструировать полость на основе определенного набора изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях. Альтернативно или в дополнение, также может быть использовано другое упорядочение. Например, модуль реконструкции полости может быть выполнен с возможностью выполнять морфологическое открытие или закрытие определенных изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях, для реконструкции полости.
В частности, если определенные изгибы, заданные посредством сгибаемого сегмента, являются несоприкасающимися сегментами, эти несоприкасающиеся сегменты лежат в полости, и поверхность полости должна быть оценена из этих изгибов. Упорядочение предпочтительно определяет, какие точки вероятно должны быть внутри полости, а какие точки вероятно должны быть снаружи полости, на основе несоприкасающихся изгибов для того, чтобы определять поверхность полости. Это упорядочение может быть основано на модели, при этом упорядочение выполняется так, что модель полости, которая предпочтительно является анатомической моделью, охватывает множество несоприкасающихся изгибов. Если предыдущая анатомическая информация, т.е., анатомическая модель полости, не представлено, модулем реконструкции полости может быть использовано однородное математическое упорядочение. Например, морфологическое открытие множества изгибов может быть использовано для оценки того, какие точки лежат обязательно внутри полости.
В другом варианте осуществления модуль реконструкции полости выполнен с возможностью интерполировать определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, для реконструкции полости. Например, может быть выполнена интерполяция между соприкасающимися изгибами для определения полости. Процедура интерполяции может использовать, например, триангуляцию, интерполяцию Фурье или другую технологию интерполяции. Таким образом, модуль реконструкции полости может быть выполнен с возможностью реконструировать полость без использования предшествующей информации, например, характерной для объекта модели.
Интерполяция определенных изгибов, заданных посредством сгибаемого сегмента в различных расположениях, для реконструкции полости может быть объединена с упорядочением. Например, упорядочение может быть выполнено посредством переключения с ограничения интерполяции на подгонку модели полости на основе энергии. Это предоставляет возможность улучшения качества реконструированной полости, если определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, являются шумными.
Предпочтительно, что объект является живым существом, при этом на полость оказывают воздействие, по меньшей мере, одно из сердечного движения и дыхательного движения, при этом устройство содержит модуль предоставления сигнала движения для предоставления сигнала движения, указывающего, по меньшей мере, одно из a) различных сердечных фаз и b) различных дыхательных фаз, при этом модуль реконструкции полости выполнен с возможностью реконструировать полость на основе определенных изгибов, заданных посредством сгибаемого сегмента, и на основе предоставленного сигнала движения. Принимая во внимание сигнал движения, т.е., сердечный сигнал и/или дыхательный сигнал, во время реконструкции полости, реконструкция может содержать меньше артефактов движения. Предпочтительно, на основе сигнала движения каждый определенный изгиб, заданный посредством сгибаемого сегмента, может быть назначен конкретной фазе движения, т.е., конкретной сердечной фазе и/или конкретной дыхательной фазе, при этом эта назначенная информация о фазе может быть использована, чтобы реконструировать полость с уменьшенными артефактами движения. Например, модуль реконструкции полости может быть выполнен с возможностью использовать только изгибы, которые соответствуют одной и той же фазе движения, для того, чтобы реконструировать полость, которая соответствует этой конкретной фазе движения.
Модуль определения изгиба может быть выполнен с возможностью определять позицию, по меньшей мере, части вводимого элемента, находящегося в соприкосновении с частью живого существа, которая движется в соответствии, по меньшей мере, с одним из сердечного цикла и дыхательного цикла, в динамике по времени, тем самым, определяя движение части вводимого элемента, при этом модуль предоставления сигнала движения может быть выполнен с возможностью определять сигнал движения в зависимости от определенного перемещения. Например, модуль определения изгиба может быть выполнен с возможностью определять позицию электрода вводимого элемента, в то время как электрод находится в соприкосновении с внутренней стенкой сердца, в динамике по времени, тем самым, определяя перемещение электрода. Поскольку электрод находится в соприкосновении с внутренней стенкой сердца, перемещение электрода вероятно должно быть периодическим в соответствии с сердечным циклом, так что сердечный сигнал может быть определен в зависимости от перемещения электрода. Также, позиция другой части вводимого элемента может быть определена в динамике по времени, в то время как эта часть находится в соприкосновении с частью, например, человека, движущейся в соответствии с сердечным циклом или дыхательным циклом, для того, чтобы определять сигнал движения в зависимости от перемещения этой части вводимого элемента. Дыхательное движение может быть оценено с помощью формы катетера, в то время как часть катетера упирается торцом в часть анатомии человека, который испытывает чистое дыхательное движение, или из которого может быть оценено дыхательное движение. Также дополнительный распознающий форму катетер может быть использован для определения дыхательного движения тем же образом. Кроме того, другое средство может быть использовано для предоставления сигнала движения. Например, электрокардиограф может быть использован для предоставления сердечного сигнала, дыхательный пояс может быть использован для предоставления дыхательного сигнала, дыхательный сигнал может быть определен на основе анализа видео, показывающего движущуюся грудную клетку человека, и т.д.
Вводимый элемент и модуль определения изгиба предпочтительно выполнены с возможностью определять изгибы, заданные посредством сгибаемого сегмента в полости, посредством оптического распознавания формы. Это предоставляет возможность устройству достоверно определять различные изгибы, заданные посредством сгибаемого сегмента в полости, без обязательного требования дополнительных модулей локализации типа электромагнитного модуля локализации или модуля локализации с помощью рентгеновских лучей.
В другом аспекте настоящего изобретения представляется компьютерная программа определения полости для определения полости в объекте, при этом компьютерная программа характеризуется средством кодирования программы, чтобы инструктировать устройству определения полости, которое определено в пункте 1 формулы, выполнять следующие этапы, когда компьютерная программа запускается на компьютере, управляющем устройством определения полости:
- определение изгибов, заданных посредством сгибаемого сегмента вводимого элемента, введенного в полость, в различных расположениях в полости, посредством модуля определения изгиба, и
- реконструкция полости из определенных изгибов посредством модуля реконструкции полости.
Следует понимать, что устройство определения полости по п.1 и компьютерная программа определения полости по п.14 имеют аналогичные и/или идентичные предпочтительные варианты осуществления, в частности, которые определены в зависимых пунктах формулы.
Следует понимать, что предпочтительный вариант осуществления изобретения также может быть любой комбинацией зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты изобретения должны становиться очевидными и должны истолковываться со ссылкой на описанные далее варианты осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На следующих чертежах
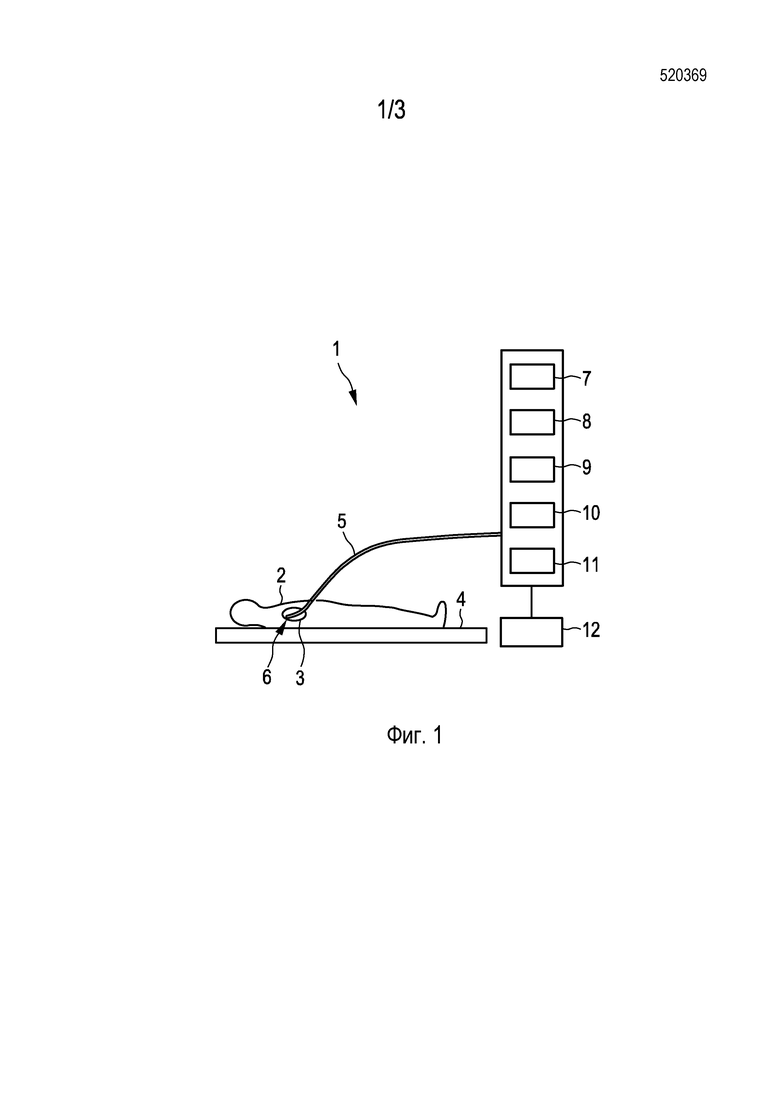
Фиг. 1 показывает схематично и для примера вариант осуществления устройства определения полости для определения полости в объекте,
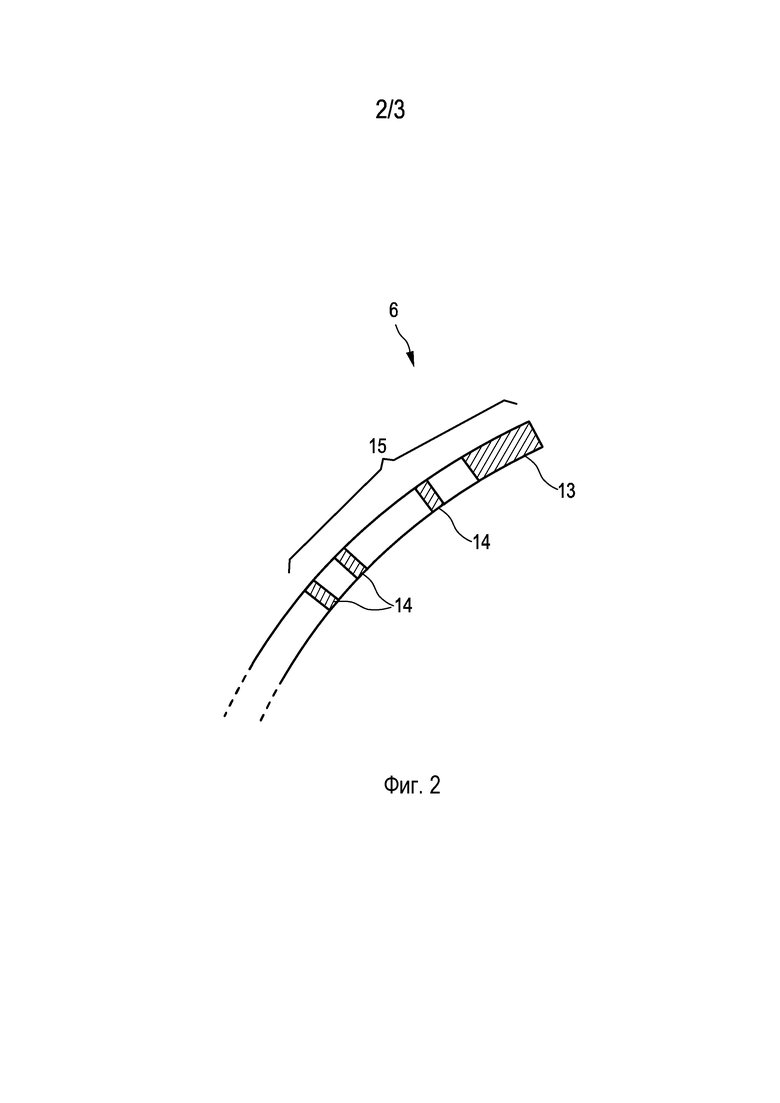
Фиг. 2 показывает схематично и для примера наконечник катетера устройства определения полости, и
Фиг. 3 показывает блок-схему последовательности операций, для примера иллюстрирующую вариант осуществления способа определения полости для определения полости в объекте.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 показывает схематично и для примера вариант осуществления устройства определения полости для определения полости в объекте. Устройство 1 содержит вводимый элемент 5 для введения в полость 3, при этом вводимый элемент 5 содержит сгибаемый сегмент для размещения в полости 3 в различных расположениях. В этом варианте осуществления объект является человеком 2, лежащим на столе 4, а полость 3 является камерой сердца человека 2. Кроме того, в этом варианте осуществления вводимый элемент 5 является абляционным катетером, при этом наконечник 6 абляционного катетера 5 был введен в полость 3. Сгибаемый сегмент абляционного катетера 5 располагается на наконечнике 6 абляционного катетера 5 и может быть спозиционирован, т.е., согнут, ориентирован и/или расположен, в полости 3 так, что он следует внутренней стенке полости 3, для того, чтобы приводить сгибаемый сегмент в соприкосновение с внутренней стенкой.
Устройство 1 определения полости дополнительно содержит модуль 7 определения изгиба для определения изгибов, заданных посредством сгибаемого сегмента в полости 3 в различных расположениях, и модуль 8 реконструкции полости для реконструкции полости на основе определенных изгибов.
Предпочтительно, сгибаемый сегмент абляционного катетера 5 размещается в различных расположениях в полости 3, так что, по меньшей мере, в некоторых из этих расположений сгибаемый сегмент следует внутренней стенке полости 3 и, таким образом, находится в соприкосновении с внутренней стенкой полости 3. В этом случае, определенные изгибы задают соприкасающиеся изгибы, при этом модуль 8 реконструкции полости выполнен с возможностью реконструировать полость в зависимости от этих соприкасающихся изгибов, т.е., в зависимости от соответствующей формы, ориентации и местоположения соответствующего соприкасающегося изгиба. В частности, модуль 8 реконструкции полости может быть выполнен с возможностью реконструировать полость так, что стенки реконструированной полости задаются посредством соприкасающихся изгибов.
Модуль 8 реконструкции полости может быть выполнен с возможностью предоставлять адаптируемую модель полости и адаптировать модель полости к соприкасающимся изгибам для определения полости. Таким образом, модель полости, которая может также рассматриваться как являющаяся существующим шаблоном полости, который может быть обобщенным или характерным для человека, может быть подогнана к соприкасающимся изгибам. Модель полости может быть сконфигурирована и/или деформирована так, что стенки модели полости задаются посредством соприкасающихся изгибов.
Если, по меньшей мере, некоторые из определенных изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях, являются несоприкасающимися изгибами, или если, в варианте осуществления, неизвестно, являются ли определенные изгибы соприкасающимися изгибами или несоприкасающимися изгибами, модель полости может быть выполнена с возможностью охватывать определенные изгибы, заданные посредством сгибаемого сегмента в полости в различных расположениях. Модель полости может рассматриваться как вид упорядочения, которое может быть использовано, чтобы реконструировать полость на основе определенного набора изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях. Альтернативно или в дополнение, также может быть использовано другое упорядочение, если все определенные изгибы являются несоприкасающимися изгибами, или если неизвестно, являются ли определенные изгибы соприкасающимися изгибами или несоприкасающимися изгибами. Например, модуль реконструкции полости может быть выполнен с возможностью выполнять морфологическое открытие или закрытие определенных изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях, для реконструкции полости.
Модуль 8 реконструкции полости может также быть выполнен с возможностью реконструировать полость посредством интерполяции определенных соприкасающихся изгибов, при этом интерполяция может включать в себя, например, триангуляцию, интерполяцию Фурье или другой метод интерполяции. Таким образом, полость может быть реконструирована "с нуля", т.е., с помощью простых форм, т.е., отобранных соприкасающихся изгибов, без каких-либо предыдущих данных. Этот вид реконструкции основан на предположении о том, что то, что составляет объем полости, т.е., внутри полости, может быть выведено из соприкасающихся изгибов.
Интерполяция определенных изгибов, заданных посредством сгибаемого сегмента в различных расположениях, для реконструкции полости может быть объединена с упорядочением для того, чтобы улучшать качество реконструированной полости, в частности, если определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, являются шумными.
Фиг. 2 показывает схематично и для примера наконечник 6 вводимого элемента 5 более подробно. Наконечник 6 вводимого элемента 5 содержит несколько кольцевых электродов 14 и колпачковый электрод 13. Эти электроды 13, 14 размещаются вдоль сгибаемого сегмента 15, при этом сгибаемый сегмент может также быть больше, чем указанный на фиг. 2. Устройство 1 дополнительно содержит модуль 9 определения соприкосновения, который электрически соединяется с электродами 13, 14, для определения информации о соприкосновении, указывающей, находится ли сгибаемый сегмент 15 в соприкосновении со стенкой полости, на основе электрических сигналов, принимаемых от электродов 13, 14, при этом модуль 8 реконструкции полости выполнен с возможностью определять, являются ли определенные изгибы соприкасающимися изгибами, в зависимости от информации о соприкосновении. В частности, модуль 9 определения соприкосновения выполнен с возможностью определять, что сгибаемый сегмент находится в соприкосновении с внутренней стенкой полости, т.е., следует внутренней стенке полости, если электрические сигналы, принимаемые от всех электродов 13, 14, указывают, что электроды 13, 14 находятся в соприкосновении с внутренней стенкой.
Если электроды 13, 14 находятся в соприкосновении с сердечной тканью внутренней стенки полости, они практически не принимают какой-либо электрический сигнал, т.е., выходной сигнал электродов является по большей части плоским. Если электроды находятся в соприкосновении с сердечной тканью, они обнаруживают периодический электрический сигнал. На основе этих различий в электрическом обнаружении модуль 9 определения соприкосновения может определять, находятся ли все электроды 13, 14 и, таким образом, сгибаемый сегмент в соприкосновении с внутренней стенкой полости, т.е., следует сгибаемый сегмент 15 внутренней стенке полости.
В некоторых различных расположениях сгибаемый сегмент может не следовать внутренней стенке полости 3 и может, следовательно, не быть в соприкосновении с внутренней стенкой, так что определенные изгибы являются несоприкасающимися изгибами, при этом модуль 8 реконструкции полости может быть выполнен с возможностью реконструировать полость также в зависимости от несоприкасающихся изгибов. В частности, модуль 8 реконструкции полости может быть выполнен с возможностью реконструировать полость так, что позиции несоприкасающихся изгибов находятся в реконструированной полости. Для определения несоприкасающихся изгибов могут быть использованы электроды 13, 14, которые также используются для определения соприкасающихся изгибов. В частности, модуль распознавания полости может быть выполнен с возможностью определять являются ли определенные изгибы несоприкасающимися изгибами, в зависимости от информации о соприкосновении, предоставленной посредством электродов 13, 14, при этом предполагается, что сгибаемый сегмент 15 не находится в соприкосновении с внутренней стенкой полости в соответствующем расположении, если не все электроды 13, 14, размещенные вдоль сгибаемого сегмента, находятся в соприкосновении с внутренней стенкой полости 3. Если два последовательных электрода находятся в соприкосновении с внутренней стенкой полости, предполагается, что сегмент катетера между этими двумя последовательными электродами находится в соприкосновении с внутренней стенкой, т.е., что этот промежуточный сегмент формирует соприкасающийся изгиб.
Если несоприкасающиеся изгибы используются для реконструкции полости, электрические сигналы, предоставленные посредством электродов, могут быть проигнорированы. Например, сгибаемый сегмент вводимого элемента перед первым ближним электродом может быть использован для задания несоприкасающихся изгибов. В целом, все части вводимого элемента, которые не располагаются между контактными электродами, могут рассматриваться как задающие несоприкасающиеся изгибы.
Устройство 1 предпочтительно выполнено с возможностью предоставлять возможность пользователю, например, врачу, размещать сгибаемый сегмент на наконечнике 6 катетера 5 в различных расположениях в полости 3, при этом после того как пользователь разместил сгибаемый сегмент в желаемом расположении, модуль 7 определения изгиба может определять изгиб, заданный посредством сгибаемого сегмента в полости 3 в этой конкретном расположении. Таким образом, различные изгибы, заданные посредством сгибаемого сегмента в полости в различных расположениях, могут быть определены, при этом, после того как эти различные изгибы были определены в различных расположениях, модуль 8 распознавания полости может быть использован, чтобы реконструировать полость на основе этих определенных изгибов.
На полость 3 оказывает влияние сердечное движение. Устройство, следовательно, дополнительно содержит модуль 10 предоставления сигнала движения для предоставления сигнала движения, указывающего различные сердечные фазы сердца человека 3, при этом модуль 8 распознавания полости выполнен с возможностью реконструировать полость на основе определенных изгибов, заданных посредством сгибаемого сегмента в различных расположениях, в частности, в зависимости от определенных соприкасающихся изгибов и необязательно также на основе определенных несоприкасающихся изгибов и на основе предоставленного сигнала движения. В этом варианте осуществления модуль 7 выполнен с возможностью определять позицию части катетера 5, находящегося в соприкосновении с частью человека 2, который движется в соответствии с сердечным циклом, в динамике по времени, тем самым, определяя перемещение этой части катетера 5, при этом модуль 10 предоставления сигнала движения выполнен с возможностью определять сигнал движения в зависимости от определенного перемещения. Например, модуль 7 определения изгиба может быть выполнен с возможностью определять позицию одного из контактных электродов, который может быть использован для определения того, находится ли сгибаемый сегмент в соприкосновении с внутренней стенкой полости или нет, в то время как контактный электрод находится в соприкосновении с внутренней стенкой полости, при этом предполагается, что внутренняя стенка полости, являющаяся, в этом варианте осуществления, сердцем человека, движется в соответствии с сердечным циклом. Циклическое движение части катетера 5, которая находится в соприкосновении с внутренней стенкой полости 3 и которая предпочтительно является контактным электродом, может быть подразделена на несколько частей для задания и определения сердечных фаз сердечного цикла. Определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, могут быть назначены этим сердечным фазам, при этом модуль 8 реконструкции полости может быть выполнен с возможностью реконструировать полость на основе определенных изгибов, которые назначаются только одной сердечной фазе. Это предоставляет возможность реконструкции полости с уменьшенными артефактами движения. В частности, для каждой сердечной фазы может быть реконструирована соответствующая полость, при этом различные реконструированные полости, которые соответствуют различным сердечным фазам, могут быть показаны временно последовательно в модуле 12 отображения для предоставления четырехмерного изображения полости.
Изгибы, заданные посредством сгибаемого сегмента в полости 3 в различных расположениях, могут быть определены в условиях задержки дыхания, так что дыхательное движение не влияет неблагоприятно на реконструкцию полости. Однако, модуль предоставления сигнала движения может также быть выполнен с возможностью дополнительно предоставлять дополнительный сигнал движения, являющийся дыхательным сигналом, который указывает различные дыхательные фазы, при этом модуль реконструкции полости может быть выполнен с возможностью реконструировать полость на основе первого сигнала движения, являющегося сердечным сигналом, который указывает сердечные фазы, и дыхательного сигнала. Дыхательный сигнал может быть определен посредством модуля предоставления сигнала движения на основе определенного перемещения части катетера 5, которая находится в соприкосновении с анатомической частью человека 2, которая движется только в соответствии с дыхательным циклом. Это перемещение может быть определено посредством модуля 7 определения изгиба, который может определять позицию этой части в динамике по времени. Модуль 8 реконструкции полости может затем быть выполнен с возможностью реконструировать полость для конкретной сердечной фазы и для конкретной дыхательной фазы на основе определенных изгибов, которые назначаются этой конкретной сердечной фазе и этой конкретной дыхательной фазе. Также в этом случае полость может быть реконструирована для различных сердечных фаз и для различных дыхательных фаз, при этом получающиеся в результате реконструированные полости могут быть показаны временно последовательно в модуле 12 отображения для предоставления четырехмерной реконструированной полости.
Катетер 5 и модуль 7 определения изгиба предпочтительно выполнены с возможностью определять изгибы, заданные посредством сгибаемого сегмента в полости 3, а также позицию дополнительных частей катетера 5 посредством оптического распознавания формы.
Устройство 1 дополнительно содержит источник 11 RF-энергии для предоставления энергии колпачковому электроду 13 катетера 5, который располагается на наконечнике катетера 5. Это предоставляет возможность врачу подвергать абляции сердечную ткань в желаемом местоположении в полости 3 в зависимости от реконструкции полости, показанной в модуле 12 отображения.
Колпачковый электрод 13, следовательно, не только используется для определения того, находится ли сгибаемый сегмент 15 в соприкосновении с внутренней стенкой полости или нет, но также для выполнения процедуры абляции. В других вариантах осуществления контактные электроды для определения того, находится ли сгибаемый сегмент в соприкосновении с внутренней стенкой полости, и один или несколько абляционных электродов могут быть различными электродами, т.е., абляционные электроды могут не использоваться для предоставления информации о соприкосновении.
В последующем вариант осуществления способ определения полости для определения полости в объекте будет для примера описан со ссылкой на блок-схему последовательности операций, показанную на фиг. 3.
На этапе 101 сгибаемый сегмент вводимого элемента размещается в различных расположениях в полости, при этом в каждом местоположении изгиб, заданный посредством сгибаемого сегмента, определяется посредством модуля определения изгиба. Таким образом, форма, ориентация и местоположение сгибаемого сегмента определяется в каждом местоположении. Кроме того, предпочтительно электроды, окружающие сгибаемый сегмент, в частности, размещаются вдоль сгибаемого сегмента, используются вместе с модулем определения соприкосновения для определения того, следует ли сгибаемый сегмент внутренней стенке полости, т.е., находится в соприкосновении с внутренней стенкой полости, в соответствующем расположении. Это предоставляет возможность определения соприкасающихся изгибов, заданных посредством сгибаемого сегмента в расположениях, в которых сгибаемый сегмент находится в соприкосновении с внутренней стенкой полости, и несоприкасающихся изгибов, заданных посредством сгибаемого сегмента в расположениях, в которых сгибаемый сегмент не находится в соприкосновении с внутренней стенкой полости.
На этапе 102 полость реконструируется из определенных изгибов посредством модуля реконструкции полости. В частности, адаптируемая модель может быть адаптирована к соприкасающимся изгибам, или соприкасающиеся изгибы могут быть интерполированы для того, чтобы реконструировать полость.
Устройство предпочтительно выполнено с возможностью выполнять минимально инвазивную чрескатетерную процедуру. Во время этих процедур врач, например, хирург или кардиолог не может наблюдать за инструментами и анатомией невооруженным глазом. Методы формирования изображений в реальном времени, такие как рентгеновские методы или ультразвуковые методы, предоставляют частичные решения этой проблемы, но они имеют свои собственные ограничения. В некоторых хирургических процедурах типа абляции при фибрилляции предсердий такие методы формирования изображения могут быть пропущены в предшествующем уровне, при этом вместо этого позиционирующее устройство типа магнитного позиционирующего устройства, прикрепленного к абляционному катетеру, может быть использовано, чтобы реконструировать полость, например, левого предсердия. Однако, каждое такое позиционирующее устройство имеет, по меньшей мере, две большие проблемы. Использование одной позиции или даже нескольких позиций для реконструкции полости формирует скудные данные, времена захвата являются продолжительными, и качество моделирования является относительно низким.
Устройство, описанное выше со ссылкой на фиг. 1 и 2, следовательно, предпочтительно выполнено так, что позиционирующее устройство может быть заменено устройством распознавания формы, которое предоставляет возможность построения реконструкции на основе изгибов, а не на основе точек, гораздо более быстрым образом. В частности, технология распознавания формы предпочтительно используется для того, чтобы восстанавливать очень быстро форму полости. Предпочтительно, форма устройства, т.е., форма сгибаемого сегмента, накапливается, в то время как устройство перемещается внутри целевой полости. Когда устройство лежит внутри полости, поверхность полости может быть восстановлена как "внешняя поверхность" накопленных форм. В частности, катетер может перемещаться быстро и более или менее случайным образом, чтобы быстро получать объем полости, например, левого предсердия сердца человека. Результат соответствующего алгоритма может затем быть использован в качестве черновой карты, чтобы направлять катетер в области, где обнаружение должно быть уточнено, например, вследствие особенно высокого интереса в этой области, и/или поскольку область является более трудной для доступа вследствие более значительных изгибов, которые могут иметь препятствовать корректному обнаружению во время первоначального поиска. Более значительные изгибы могут присутствовать, например, в легочных венах.
Для определения того, принадлежит ли точка, лежащая снаружи полученных форм, т.е., снаружи множества определенных форм, заданных посредством сгибаемого сегмента в различных расположениях в полости, полости или нет, устройство может быть выполнено с возможностью использовать условие регулярности. Это условие регулярности может быть выражено, например, как одна математическая операция открытия или закрытия, или условие регулярности может быть более сложным и основанным на знании условием, основанным, например, на ячеистом шаблоне целевой полости.
Устройство предпочтительно выполнено с возможностью создавать последовательный вывод, даже если полость движется и/или деформируется. Особенно, если устройство используется в кардиотонических прикладных задачах, устройство может быть выполнено с возможностью обрабатывать деформации во время сердечного цикла и также учитывать дыхательное движение. Когда форма камер сердца деформируется во время сердечного цикла, определенные изгибы, которые соответствуют различным сердечным фазам, предпочтительно не смешиваются. Устройство может быть выполнено с возможностью реконструировать трехмерную модель в конкретной сердечной фазе или в неопределенной сердечной фазе, если модель основывается на временном усреднении. Устройство может также быть выполнено с возможностью реконструировать четырехмерную модель, т.е., зависимую от времени пространственную трехмерную модель полости.
Для идентификации сердечной фазы и для назначения идентифицированной сердечной фазы соответствующим определенным изгибам может быть использован вышеописанный способ, который основывается на определении перемещения части вводимого элемента, который движется в соответствии с сердечным циклом, поскольку он находится в соприкосновении, например, с внутренней стенкой сердечной камеры. Однако, сердечный сигнал может также быть предоставлен другим средством. Например, известный электрокардиограф может быть использован для предоставления сердечного сигнала. Кроме того, также возможно определять сердечную фазу из сигнала электрокардиографии и из определенного движения части вводимого элемента, который находится в соприкосновении, например, с внутренней стенкой сердечной камеры.
Для того, чтобы смягчать возможное воздействие дыхательного движения на качество реконструкции полости, получение, т.е., определение изгибов, заданных посредством сгибаемого сегмента в различных ориентациях, может быть выполнено при обеспеченной задержке дыхания. Альтернативно, дыхательное движение может быть оценено с помощью формы вводимого элемента, в частности, катетера, в то время как часть вводимого элемента лежит вплотную к части анатомии живого существа, из которой может быть оценено дыхательное движение, в частности, которое испытывает чистое дыхательное движение.
Также, второй распознающий форму вводимый элемент, в частности, второй распознающий форму катетер, может быть использован аналогичным образом для определения дыхательного движения. В этом случае, первый вводимый элемент не должен направляться через область, испытывающую, например, чистое дыхательное движение, поскольку второй распознающий форму вводимый элемент уже предоставляет дыхательное движение, которое может быть использовано для формирования дыхательного сигнала. Например, в процедурах абляции при фибрилляции предсердий катетер коронарного синуса может быть использован в качестве второго распознающего форму вводимого элемента в комбинации с технологиями отмены движения сердца.
Дыхательное движение также может быть определено с помощью других способов типа дыхательного пояса, анализа видео, показывающего часть человека, например, грудную клетку, выполняющую дыхательное движение, и т.д.
Хотя в вариантах осуществления, описанных выше, возможное неблагоприятное влияние на реконструкцию полости вследствие дыхательного движения уменьшается посредством определения изгибов, заданных посредством сгибаемого сегмента в различных расположениях, в условиях задержки дыхания или посредством реконструкции полости для конкретной дыхательной фазы на основе изгибов, заданных посредством сгибаемого сегмента в различных расположениях, которые соответствуют этой конкретной дыхательной фазе, неблагоприятное влияние дыхательного движения также может быть уменьшено другим способом. Например, определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, могут быть скорректированы посредством трансляционной операции в соответствии с определенным дыхательным движением, при этом полость может быть реконструирована на основе скорректированных изгибов.
Устройство предпочтительно приспосабливается к модели или подгоняется к анатомической части, т.е., анатомической полости в живом существе, на основе катетера с функцией распознавания формы, предпочтительно без дополнительных требований. Дополнительно является предпочтителным, что устройство использует большие сегменты катетера для определения полости в живом существе, т.е., устройство предпочтительно не только использует точечные позиции как в случае известных методов электромагнитного отслеживания, но устройство использует более крупные сегменты, которые больше, чем точки, например, на катетере.
Устройство предпочтительно выполнено с возможностью использовать одновременно технологию распознавания формы и множественные контактные электроды, при этом соприкосновение электрода вводимого элемента с полостью получается на основе электрического сигнала, измеренного посредством соответствующего электрода.
В варианте осуществления предполагается, что, когда два электрода находятся в соприкосновении, часть вводимого элемента, т.е., сгибаемый сегмент, лежащий между ними, также находится в соприкосновении с полостью, так что форма вводимого элемента между двумя электродами, предоставленная посредством распознавания формы, которая может задавать соответствующий соприкасающийся изгиб, может быть использована для реконструкции полости. Если искривление полости является очень высоким в некоторых областях, это предположение может быть нарушено, тем самым, создавая суб-сегментацию полости. Эта суб-сегментация полости может быть скорректирована посредством вставки вводимого элемента внутрь полости. Например, наконечник катетера может направляться в эти области, и позиция наконечника катетера может быть определена, в то время как наконечник катетера находится в этих областях. Эти позиции могут быть использованы вместе с определенными изгибами, заданными посредством сгибаемого сегмента в различных расположениях для реконструкции полости, при этом полость может быть реконструирована так, что определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, а также определенные позиции наконечника катетера в областях с относительно высокой кривизной, находятся в полости. Например, модель полости может быть адаптирована к этим позициям так, что модель полости охватывает различные изгибы, заданные посредством сгибаемого сегмента, и позиции наконечника катетера и так, что адаптированная модель полости согласуется с этими позициями настолько хорошо, насколько возможно.
Хотя в вышеописанных вариантах осуществления вводимый элемент содержит электроды для определения того, находится ли сгибаемый сегмент в соприкосновении с внутренней стенкой полости, в других вариантах осуществления вводимый элемент может не содержать электроды для определения этой информации о соприкосновении, в частности, вводимый элемент может не содержать какого-либо электрода или содержать только электроды для других целей. В этом случае, как правило, не известно, являются ли определенные изгибы, заданные посредством сгибаемого сегмента, соприкасающимися изгибами или несоприкасающимися изгибами. Однако, также без этой информации о соприкосновении модуль реконструкции полости может реконструировать полость, например, адаптируя модель полости, в частности, анатомическую модель полости, к множеству определенных изгибов так, что определенные изгибы находятся в адаптированной модели полости, и так, что адаптированная модель полости согласуется настолько хорошо, насколько возможно, с внешними изгибами для определенных изгибов, или выполняя, например, морфологическое открытие или закрытие множества изгибов.
Устройство может также быть выполнено с возможностью записывать координаты изгибов, которые не находятся в соприкосновении с полостью, т.е., записывать несоприкасающиеся изгибы, для того, чтобы предоставлять указание того, что составляет внутренность полости. Это также может быть использовано на конечном этапе, чтобы закрывать дыры в реконструированной полости вследствие нереагирующих тканей типа рубцов или подвергшихся абляции областей.
Устройство может быть адаптировано к модели или подгоняться к анатомической части на основе вводимого элемента как с распознающими форму волокнами, так и с множеством электродов, при этом формы полости могут быть реконструированы на основе полных изгибов вводимого элемента. Устройство предпочтительно выполнено с возможностью использоваться в процедурах абляции при фибрилляции предсердий для того, чтобы уменьшать воздействие излучения на пациента, как перед операцией, и также после операции.
Другие вариации в раскрытых вариантах осуществления могут быть поняты и выполнены специалистами в данной области техники, применяющими на практике заявленное изобретение, из изучения чертежей, раскрытия и прилагаемой формулы изобретения.
В формуле изобретения слово "содержит" не исключает других элементов или этапов, а указание на единственное число не исключает множества.
Один модуль или устройство может удовлетворять функциям нескольких элементов, изложенных в формуле изобретения. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, чтобы комбинация этих мер не может быть использована с выгодой.
Определения типа определения полости, т.е., реконструкция полости, определение различных изгибов, заданных посредством сгибаемого сегмента в полости в различных расположениях, определение сигнала движения и т.д., выполняемые посредством одного или нескольких модулей или устройств, могут быть выполнены посредством любого другого числа модулей или устройств. Определения и/или управление устройством определения полости в соответствии со способом определения полости могут быть реализованы как средство кодирования программы компьютерной программы и/или как специализированные аппаратные средства.
Компьютерная программа может быть сохранена/распространяться на подходящем носителе, таком как оптический носитель хранения или твердотельный хранитель, поставляемый вместе или как часть других аппаратных средств, но может также распространяться в других формах, например, через Интернет или другие проводные или беспроводные системы связи.
Все ссылки с номерами в формуле изобретения не должны рассматриваться как ограничивающие объем.
Изобретение относится к устройству определения полости для определения полости в объекте, в частности, для определения местоположения и размеров сердечной камеры в человеке. Сгибаемый сегмент вводимого элемента размещается в полости в различных расположениях, при этом изгибы, заданные посредством сгибаемого сегмента в различных расположениях, определяются посредством модуля определения изгиба. Модуль реконструкции полости реконструирует полость на основе определенных изгибов. Таким образом, для реконструкции полости получаются и используются не только одиночные небольшие местоположения в полости, но и более крупные изгибы. Большой объем пространственной информации может, следовательно, быть получен и использован очень быстро. Это предоставляет возможность реконструкции полости с улучшенным качеством в относительно короткое время.
Изобретение относится к медицинской технике. Устройство определения полости для определения полости в объекте содержит вводимый элемент для введения в полость, модуль определения изгиба для определения соприкасающихся изгибов и модуль реконструкции полости для реконструкции полости на основе определенных изгибов. Сгибаемый сегмент вводимого элемента для размещения в полости в различных расположениях выполнен с возможностью определения его изгиба в различных расположениях. Соприкасающиеся изгибы заданы посредством сгибаемого сегмента, находящегося в соприкосновении с внутренней стенкой полости в различных расположениях. Модуль реконструкции полости выполнен с возможностью реконструировать полость в зависимости от соприкасающихся изгибов. Достигается повышение быстроты и точности определения полости в объекте за счет того, что требуется гораздо меньше перемещений катетера и измерений, поскольку определяемая кривая сегмента катетера содержит больше геометрической информации, чем одна точка. 2 н. и 11 з.п. ф-лы, 3 ил.
1. Устройство определения полости для определения полости в объекте, причем устройство (1) содержит:
- вводимый элемент (5) для введения в полость (3), при этом вводимый элемент (5) содержит сгибаемый сегмент для размещения в полости (3) в различных расположениях, характеризующееся тем, что сгибаемый сегмент выполнен с возможностью определения его изгиба в каждом из различных расположений, и устройство (1) определения полости дополнительно содержит:
- модуль (7) определения изгиба для определения соприкасающихся изгибов, заданных посредством сгибаемого сегмента, находящегося в соприкосновении с внутренней стенкой полости (3) по меньшей мере в некоторых из упомянутых различных расположений,
- модуль (8) реконструкции полости для реконструкции полости на основе определенных изгибов, выполненный с возможностью реконструировать полость в зависимости от соприкасающихся изгибов.
2. Устройство по п.1, при этом модуль (8) реконструкции полости выполнен с возможностью реконструировать полость так, что определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, находятся в реконструированной полости.
3. Устройство по п.1, при этом модуль (8) реконструкции полости выполнен с возможностью реконструировать полость так, что стенки реконструированной полости соответствуют соприкасающимся изгибам.
4. Устройство по п.1, при этом вводимый элемент (5) содержит по меньшей мере два электрода (13, 14), между которыми располагается сгибаемый сегмент, при этом устройство (1) содержит модуль (9) определения соприкосновения, который электрически соединен по меньшей мере с двумя электродами (13, 14) для определения информации о соприкосновении, указывающей, находится ли сгибаемый сегмент в соприкосновении с внутренней стенкой полости, на основе электрических сигналов, принимаемых от электродов, при этом модуль (8) реконструкции полости выполнен с возможностью определять, являются ли определенные изгибы соприкасающимися изгибами, в зависимости от информации о соприкосновении.
5. Устройство по п.1, при этом по меньшей мере в некоторых из различных расположений сгибаемый сегмент не находится в соприкосновении с внутренней стенкой полости (3), так что изгибы, заданные посредством сгибаемого сегмента, являются несоприкасающимися изгибами, при этом модуль (8) реконструкции полости выполнен с возможностью реконструировать полость в зависимости от соприкасающихся изгибов и в зависимости от несоприкасающихся изгибов.
6. Устройство по п.5, при этом модуль (8) реконструкции полости выполнен с возможностью реконструировать полость так, что несоприкасающиеся изгибы находятся в реконструированной полости.
7. Устройство по п.5, при этом вводимый элемент (5) содержит по меньшей мере два электрода (13, 14), между которыми располагается сгибаемый сегмент, при этом устройство (1) содержит модуль (9) определения соприкосновения, который электрически соединен по меньшей мере с двумя электродами (13, 14), для определения информации о соприкосновении, указывающей, находится ли сгибаемый сегмент в соприкосновении с внутренней стенкой полости (3), на основе электрических сигналов, принимаемых от электродов (13, 14), при этом модуль (8) реконструкции полости выполнен с возможностью определять, являются ли определенные изгибы несоприкасающимися изгибами, в зависимости от информации о соприкосновении.
8. Устройство по п.1, при этом модуль (8) реконструкции полости выполнен с возможностью использовать упорядочение для реконструкции полости из определенных изгибов, заданных посредством сгибаемого сегмента в полости (3) в различных расположениях.
9. Устройство по п.1, при этом модуль (8) реконструкции полости выполнен с возможностью предоставлять адаптируемую модель полости и адаптировать модель полости к определенным изгибам, заданным посредством сгибаемого сегмента в различных расположениях для реконструкции полости.
10. Устройство по п.1, при этом модуль (8) реконструкции полости выполнен с возможностью интерполировать определенные изгибы, заданные посредством сгибаемого сегмента в различных расположениях, для реконструкции полости.
11. Устройство по п.1, при этом объект (2) является живым существом, при этом на полость (3) оказывают воздействие по меньшей мере одно из сердечного движения и дыхательного движения, при этом устройство (1) содержит модуль (10) предоставления сигнала движения для предоставления сигнала движения, указывающего по меньшей мере одно из a) различных сердечных фаз и b) различных дыхательных фаз, при этом модуль (8) реконструкции полости выполнен с возможностью реконструировать полость на основе определенных изгибов, заданных посредством сгибаемого сегмента, и на основе предоставленного сигнала движения.
12. Устройство по п.1, при этом вводимый элемент (5) и модуль (7) определения изгиба выполнены с возможностью определять изгибы, заданные посредством сгибаемого сегмента в полости (3), посредством оптического распознавания формы.
13. Машиночитаемый носитель, на котором хранится компьютерная программа определения полости для определения полости в объекте, при этом компьютерная программа характеризуется средством кодирования программы для инструктирования устройства (1) определения полости, которое определено в п.1, выполнять следующие этапы, когда компьютерная программа запускается на компьютере, управляющем устройством определения полости:
- определяют соприкасающиеся изгибы, заданные посредством сгибаемого сегмента вводимого элемента (5), введенного в полость и находящегося в соприкосновении с внутренней стенкой полости (3), посредством модуля (7) определения изгиба, и
- реконструируют полость (3) из определенных изгибов посредством модуля (8) реконструкции полости, выполненного с возможностью реконструировать полость в зависимости от соприкасающихся изгибов.
| US 2009076476 A1, 19.03.2009 | |||
| US 2007265503 A1, 15.11.2007 | |||
| US 2003231789 A1, 18.12.2003 | |||
| US 6272371 B1, 07.08.2001 | |||
| US 2011137153 A1, 09.06.2011 | |||
| US 5738096 A, 14.04.1998 | |||
| WO 9605768 A1, 29.02.1996 | |||
| KR 20020014755 A, 25.02.2002 | |||
| RU 2009132436 A, 10.03.2011. |

