ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к инвазивным медицинским устройствам и, в частности, к способам и устройствам для отображения характеристик зонда, такого как катетер, внутри тела пациента.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В некоторых диагностических и терапевтических методиках катетер вводится в полость сердца и приводится в соприкосновение с внутренней стенкой сердца. В таких процедурах, в основном, важным является то, что дистальный наконечник катетера захватывает эндокард с достаточным давлением, чтобы обеспечить хороший контакт. Избыточное давление, однако, может вызвать нежелательное повреждение ткани сердца и даже перфорацию стенки сердца.
Например, при внутрисердечной радиочастотной (РЧ) абляции катетер, имеющий на дистальном конце электрод, вводится через сердечно-сосудистую систему пациента внутрь полости сердца. Электрод приводится в соприкосновение с участком (или участками) эндокарда, и РЧ энергия прилагается через катетер к электроду для абляции ткани сердца на данном участке. Необходим надлежащий контакт между электродом и эндокардом во время абляции, чтобы достичь требуемого терапевтического эффекта без излишнего повреждения ткани.
Ряд патентных публикаций описывает катетеры со встроенными датчиками давления для распознавания контакта с тканью. В качестве одного примера, публикация заявки на патент США 2007/0100332, которая включена в настоящее описание посредством ссылки, описывает системы и способы оценки интенсивности контакта электрода с тканью для абляции ткани. Электромеханический датчик внутри стержня катетера генерирует электрические сигналы, соответствующие количеству движений электрода в пределах дистальной секции стержня катетера. Устройство вывода данных принимает электрические сигналы для оценки уровня контакта между электродом и тканью.
Как другой пример, патент США 6695808, который включен в настоящее описание посредством ссылки, описывает аппарат для лечения выбранной ткани пациента или области органа. Зонд имеет контактную поверхность, которую можно нацелить на область, таким образом создавая контактное давление. Преобразователь давления измеряет контактное давление. Считается, что данная конструкция удовлетворяет потребностям процедур, при которых медицинский инструмент нужно привести в плотное, но не чрезмерное соприкосновение с анатомической поверхностью, путем предоставления пользователю инструмента информации, которая является показателем наличия и величины контактной силы.
Другие катетеры с датчиками давления описываются патентом США 6241724 и патентом США 6915149, описание которых включены в данное описание посредством ссылки.
Международная публикация WO 2007/067938 согласно РСТ, описание которой включено в данное описание посредством ссылки, описывает способ отображения контакта электрода с тканью катетера в электро-анатомической системе картирования и навигации. Данная система обеспечивает индикацию для врача относительно электрического взаимодействия электрода, такого как абляционный электрод или электрод картирования, с пациентом. Индикация может обеспечиваться посредством изменения цвета или других отображаемых характеристик электрода на экране навигационной системы или путем представления колебательного сигнала, показывающего соединение электрода. Такой способ предоставления информации о соединении электрода считается наименее отвлекающим внимание врача.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения, описанные ниже, обеспечивают новые средства и способы отображения параметров, связанных с качеством захватывания инвазивным зондом ткани внутри тела объекта. Данный тип отображения может содействовать оператору зонда в визуальном наблюдении ситуации для данного зонда и, таким образом, в обеспечении эффективности и безопасности диагностических и/или терапевтических процедур, проводимых с помощью данного зонда.
Вариант осуществления настоящего изобретения предусматривает способ отображения информации. Данный способ включает в себя получение измерения в отношении инвазивного зонда внутри тела объекта, по меньшей мере, одного параметра зонда, выбранного из группы параметров, состоящей из угла изгиба зонда и давления на зонд. В соответствии с измерением, на экране дисплея отображается иконка, представляющая, по меньшей мере, один параметр зонда для наблюдения оператором зонда.
В некоторых вариантах осуществления зонд включает в себя дистальный наконечник, который изгибается в упругом соединении, а получение измерения включает в себя измерение деформации соединения вследствие зацепления ткани в теле дистальным концом. В раскрываемом варианте осуществления зонд содержит катетер, который вводится в полость сердца объекта и захватывает ткань сердечной мышцы. Данный способ может включать в себя приложение энергии через дистальный конец для абляции ткани сердечной мышцы, причем оператор контролирует приложение энергии в соответствии с иконкой. Дополнительно или в качестве альтернативы, измерение деформации включает в себя распознавание как деформации соединения, так и позиции зонда внутри тела путем передачи и приема одного или нескольких магнитных полей.
Обычно, отображение иконки включает в себя размещение иконки на экране дисплея для представления местонахождения зонда внутри тела. Размещение иконки может включать в себя расположение иконки на экране дисплея относительно карты поверхности органа тела, и при этом получение измерения содержит измерение давления между зондом и поверхностью.
В раскрываемом варианте осуществления отображение иконки включает в себя представление иконки для показа как угла изгиба, так и давления, причем иконка выполнена с возможностью поворота для показа угла изгиба, и окрашивания для представления давления.
Также, в соответствии с вариантом осуществления настоящего изобретения, предусматривается устройство для выполнения медицинской процедуры, содержащее экран дисплея, устроенный для наблюдения оператором за инвазивным зондом внутри тела объекта. Подсоединяется процессор для получения измерения в отношении инвазивного зонда, по меньшей мере, одного параметра зонда, выбранного из группы параметров, состоящей из угла изгиба зонда и давления на зонд, и для отображения на экране дисплея иконки, соответствующей измерению и представляющей, по меньшей мере, один параметр зонда.
Дополнительно предусматривается, в соответствии с вариантом осуществления настоящего изобретения, компьютерный программный продукт, включающий в себя машиночитаемый носитель, на котором хранятся программные инструкции, которые, при считывании компьютером, инициируют получение компьютером измерения в отношении инвазивного зонда внутри тела объекта, по меньшей мере, одного параметра зонда, выбранного из группы параметров, состоящей из угла изгиба зонда и давления на зонд, и отображение, в соответствии с измерениями, на экране дисплея иконки, представляющей, по меньшей мере, один параметр зонда для наблюдения оператором зонда.
Настоящее изобретение будет более понятным из последующего подробного описания его вариантов осуществления вместе с чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
фиг.1 представляет собой схематическую графическую иллюстрацию медицинской системы на основе использования катетера в соответствии с вариантом осуществления настоящего изобретения;
фиг.2 представляет собой схематический детальный вид, показывающий дистальный наконечник катетера в соприкосновении с внутрисердечной тканью, в соответствии с вариантом осуществления настоящего изобретения; и
фиг.3 представляет собой схематическое изображение экрана дисплея, включая иконку, соответствующую наконечнику катетера, в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
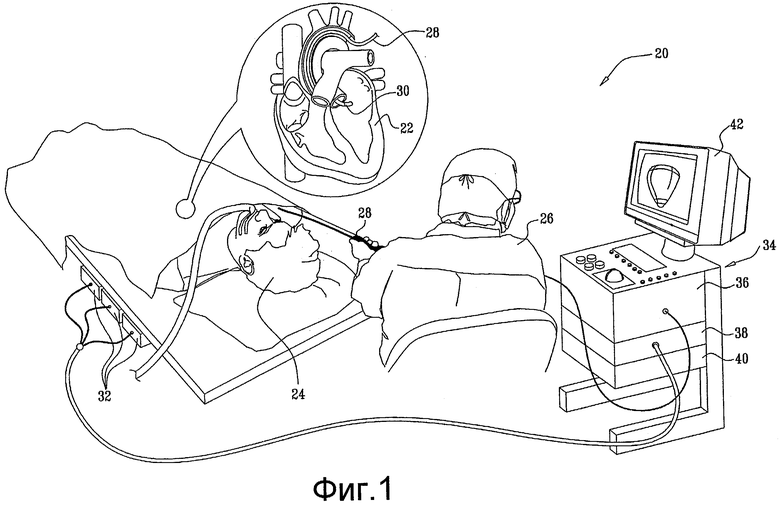
Фиг.1 представляет собой схематическую графическую иллюстрацию системы 20 для катетеризации сердца в соответствии с вариантом осуществления настоящего изобретения. Система 20 может быть основана, например, на системе CARTO™ производства компании Biosense Webster Inc. (Diamond Bar, Калифорния). Эта система содержит инвазивный зонд в форме катетера 28 и пульт 34 управления. В варианте осуществления, описываемом ниже, предполагается, что катетер 28 используется при абляции внутрисердечной ткани, как известно из уровня техники. В качестве альтернативы, катетер может использоваться с учетом необходимых изменений для других терапевтических и/или диагностических целей в сердце или других органах тела.
Оператор 26, такой как кардиолог, вводит катетер 28 через сердечно-сосудистую систему пациента 24 так, что дистальный конец 30 катетера входит внутрь полости сердца 22 пациента. Оператор продвигает катетер так, чтобы дистальный наконечник катетера захватил внутрисердечную ткань в необходимой точке или точках. Катетер 28 обычно соединяется с пультом 34 посредством подходящего разъема на его проксимальном конце. Пульт 34 содержит генератор 40 радиочастоты (РЧ), который подает высокочастотную электрическую энергию через катетер для абляции ткани в сердце к участкам, захваченным дистальным наконечником, как описывается далее. В качестве альтернативы, катетер и система могут быть сконфигурированы для осуществления абляции по другим методикам, которые известны из уровня техники, как, например, крио-абляция. Также, в качестве альтернативы или дополнительно, катетер и система могут применяться для выполнения терапевтических и/или диагностических процедур других типов, таких как электро-анатомическое картирование.
Пульт 34 использует технику позиционного распознавания для определения координат местоположения дистального конца 30 катетера 28 внутри сердца 22. В настоящем варианте осуществления предполагается, что пульт использует магнитное позиционное распознавание, которое также применяется в данных об угле изгиба и давлении в отношении дистального конца, как описывается далее. Дополнительно или в качестве альтернативы, принципы настоящего изобретения могут быть применены при использовании других техник позиционного распознавания и измерения давления, как известно из уровня техники.
С целью магнитного позиционного распознавания задающая схема 38 в пульте 34 запускает генераторы 32 полей, которые создают магнитные поля внутри тела пациента 24. Обычно, генераторы полей содержат катушки, которые располагаются в нижней части туловища пациента в известных точках наружно на пациенте. Эти катушки генерируют магнитные поля в предопределенном рабочем объеме, который вмещает сердце 22. Датчик магнитного поля внутри дистального конца 30 катетера 28 (не показан на чертежах) генерирует электрические сигналы в ответ на эти магнитные поля. Процессор 36 сигналов обрабатывает эти сигналы с тем, чтобы определить координаты местоположения дистального конца, обычно включая координаты и местоположения, и ориентации. Этот способ позиционного распознавания реализован в вышеупомянутой системе CARTO и описывается подробно в патентах США 5391199, 6690963, 6484118, 6239724, 6618612 и 6332089, в публикации патента WO 96/05768 согласно РСТ и публикациями заявок на патент США 2002/0065455 А1, 2003/0120150 А1 и 2004/0068178 А1, описания которых включены в данное описание посредством ссылки.
Процессор 36 обычно содержит универсальную вычислительную машину с подходящим устройством предварительной обработки данных и схемами интерфейса для получения сигналов от катетера 28 и управления другими компонентами пульта 34. Процессор можно запрограммировать с помощью программного обеспечения на выполнение функций, которые описываются в данном описании. Программное обеспечение может быть загружено в пульт 34 в электронном виде, через сеть, например, или оно может быть предусмотрено на физических носителях, таких как оптические, магнитные или электронные носители памяти. В качестве альтернативы, некоторые или все функции процессора 36 могут выполняться специализированными или программируемыми цифровыми аппаратными компонентами системы.
Основываясь на сигналах, получаемых от катетера 28 и других компонентов системы 20, процессор 36 запускает дисплей 42 для предоставления оператору 26 визуальных откликов относительно дистального конца 30 катетера 28 в теле пациента, а также информации о состоянии и дистанционного управления относительно процедуры, выполняющейся в данный момент. Визуальные отклики показывают давление на дистальный конец, а также угол изгиба дистального наконечника катетера, как описывается ниже со ссылкой на фиг.3.
Дополнительно или в качестве альтернативы, система 20 может содержать автоматизированный механизм для маневрирования и манипулирования катетером 28 внутри тела пациента 24. Такие механизмы обычно способны управлять как продольным движением (вперед/назад) катетера, так и поперечным движением (отклонение/поворот) дистального конца катетера. Некоторые механизмы данного типа используют магнитные поля постоянного тока с этой целью, например. В таких вариантах осуществления процессор 36 генерирует контрольный входной сигнал для управления движения катетера на основе сигналов, поступающих от датчика магнитного поля в катетере. Как отмечено выше, эти сигналы являются показательными как для позиции дистального конца катетера, так и для силы, действующей на дистальный конец. В данном случае давление и угол изгиба, показываемые на дисплее 42, могут использоваться человеком-оператором в наблюдении состояния и хода выполнения автоматизированной процедуры.
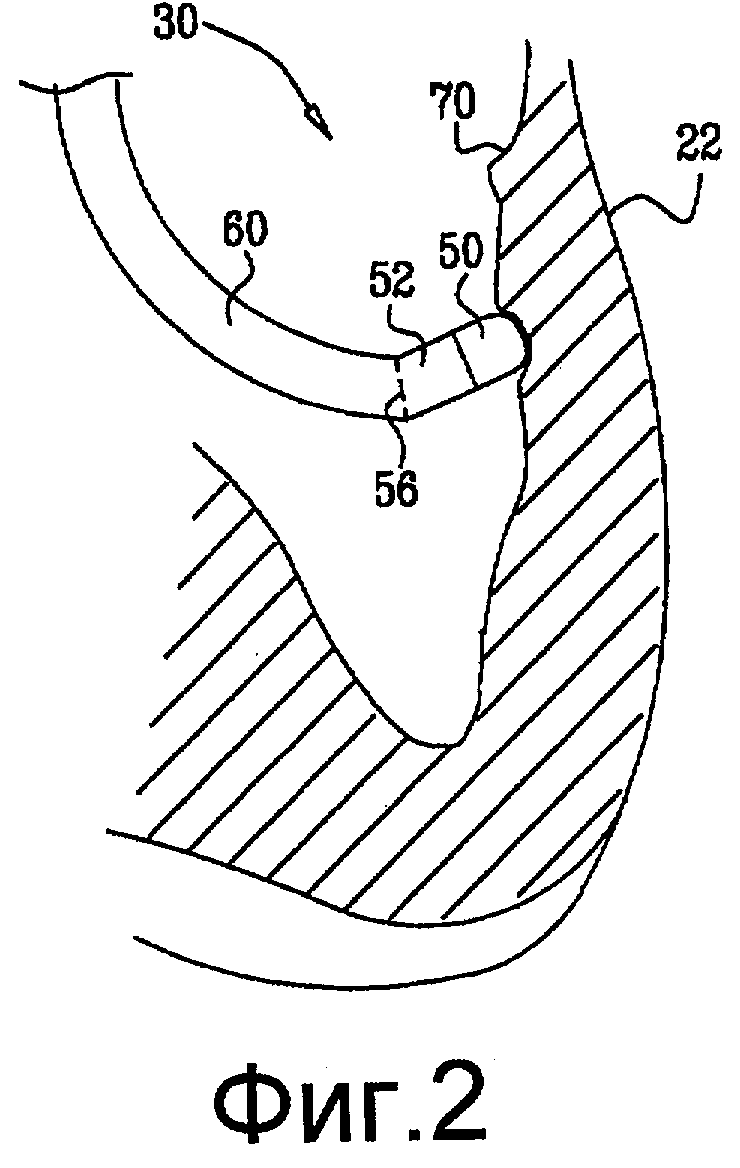
Фиг.2 представляет собой схематический вид полости сердца 22, данный в разрезе и показывающий дистальный конец 30 катетера 28 внутри сердца, в соответствии с вариантом осуществления настоящего изобретения. Катетер содержит вводимую часть 60, которая обычно вводится в сердце чрескожно через кровеносный сосуд, такой как полая вена или аорта. Электрод 50 на дистальном наконечнике 52 катетера захватывает внутрисердечную ткань 70. Давление дистального наконечника, действующее на эндокард, местно деформирует внутрисердечную ткань так, что электрод 50 контактирует с относительно большой площадью ткани. В иллюстрируемом примере электрод захватывает эндокард не столько прямо, сколько под углом. Дистальный наконечник 52, таким образом, изгибается в упругом соединении 56 относительно дистального конца вводимой части 60 катетера. Изгиб может способствовать оптимальному контакту между электродом и внутрисердечной тканью.
Благодаря эластичным свойствам соединения 56 угол изгибания и аксиальное смещение соединения пропорциональны давлению, действующему со стороны ткани 70 на дистальный наконечник 52 (или, что равнозначно, давлению, действующему со стороны дистального наконечника на ткань). Измерение деформации соединения, в том, что касается угла изгиба и аксиального смещения, таким образом, дает обозначение этого давления. Обозначение давления может использоваться оператором 26 системы 20 для того, чтобы убедиться, что дистальный наконечник надавливает на эндокард достаточно плотно для получения необходимого терапевтического или диагностического результата, но не настолько сильно, чтобы вызвать нежелательное повреждение ткани.
Разнообразные методики могут использоваться в измерении угла изгиба и давления, действующего на дистальный наконечник 52. Компоненты и способы, которые могут применяться для этой цели, описываются, например, в заявке на патент США 11/868733, зарегистрированной 8 октября 2007 г., право на которую переуступается патентообладателю настоящей заявки на патент, и описание которой включено в настоящее описание посредством ссылки. Данная заявка на патент описывает катетер, дистальный наконечник которого соединяется с дистальным концом вводимой части катетера посредством подпружиненного соединения (такого как соединение 56), которое деформируется в ответ на давление, действующее на дистальный наконечник при захвате им ткани. Узел магнитного позиционного распознавания внутри зонда, содержащий катушки на противоположных сторонах соединения, распознает позицию дистального наконечника относительно дистального конца вводимой части. Изменение этой относительной позиции является показателем деформации пружины и, таким образом, дает обозначение давления.
Соединение 56 может содержать суперэластичный соединительный элемент, как описывается в заявке на патент США 12/134592, зарегистрированной 6 июня 2008 г. В качестве альтернативы, соединительный элемент может включать в себя витую пружину или упругий компонент любого другого подходящего типа с необходимыми характеристиками гибкости и прочности. В заявке на патент США 12/327226, зарегистрированной 3 декабря 2008 г., описывается устройство магнитных катушек внутри дистального конца катетера, которое может использоваться в распознавании угла и давления наконечника с повышенной точностью. Право на обе эти заявки на патент переуступается патентообладателю настоящей заявки на патент, и они включены в настоящее описание посредством ссылки.
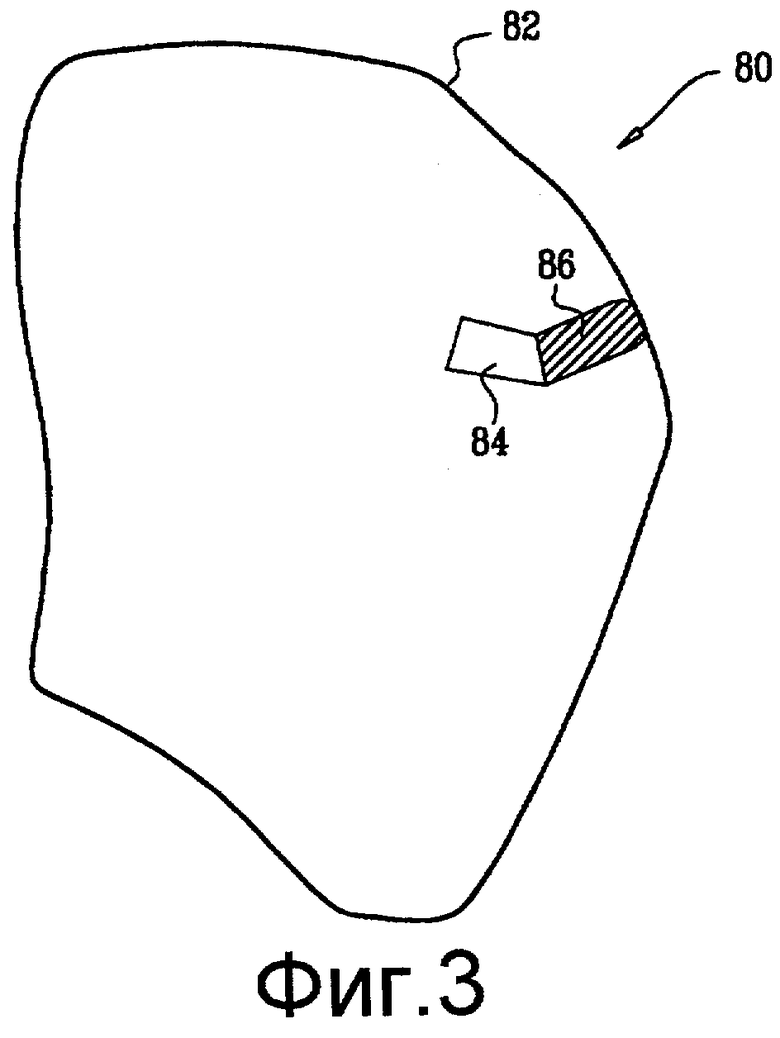
Фиг.3 представляет собой схематическое изображение карты 80 полости сердца, которое включает иконку 84, соответствующую дистальному концу 30 катетера 28, в соответствии с вариантом осуществления настоящего изобретения. Карта данного типа обычно представляется на дисплее 42 как вспомогательное средство для оператора 26 в визуализации дистального конца катетера в пределах сердца 22. Карта включает в себя графическое представление внутренней поверхности 82 полости сердца, в которой располагается дистальный конец катетера. (Поверхность 82 можно реконструировать полностью, как показано на фиг.3, либо лишь частично.) Позиция иконки 84 относительно поверхности 82 дает оператору обозначение местоположения настоящего дистального конца катетера в полости сердца.
Иконка 84 показывает не только местоположение дистального конца 30, но также характеристики угла и давления. В примере, представленном на фиг.3, иконка выполнена с возможностью поворота для показа измеренного угла изгиба дистального наконечника 52 относительно вводимой части 60. Если оператор видит, что дистальный наконечник катетера изогнут под острым углом, например, он или она может перенастроить позицию катетера перед тем, как продолжать диагностическую или терапевтическую процедуру, такую как абляция ткани сердца.
Кроме того, по меньшей мере, часть 86 иконки может быть окрашена (на чертеже представлено штриховкой) для обозначения давления. Например, окрашивание в зеленый цвет может означать, что давление находится в диапазоне, соответствующем РЧ-абляции, в то время как красный цвет может означать слишком высокое давление, а синий цвет - слишком низкое. Диапазоны давления могут устанавливаться заранее либо они могут регулироваться оператором. В любом случае оператор затем применяет РЧ-энергию, только когда давление находится в пределах диапазона, что даст необходимый терапевтический результат.
Графическое отображение давления и угла изгиба посредством иконки 84 дает оператору дополнительную визуальную информацию, что не предусматривается методиками отображения, известными из уровня техники. Эта дополнительная информация может быть полезной в качестве дополнения или вместо измерения электрического контактного сопротивления электрод/ткань. Само отображение давления и/или угла важно, например, при следующих обстоятельствах:
- При соприкосновении с рубцеватой сердечной мышцей электрическое контактное сопротивление не отразит давление с точностью, и поэтому требуется прямое измерение давления.
- Когда катетер касается стенки сердца сбоку (вдоль длины катетера), электрическое контактное сопротивление может быть низким, так как контактная площадь велика, даже если давление, действующее на стенку сердца со стороны катетера, мало. Отображение давления и угла, как изображено на фиг.3, дает возможность оператору выявлять и исправлять ситуации данного типа.
- Аналогично, когда катетер касается трабекулярной стенки, электрическое контактное сопротивление может быть низким, даже если приложено небольшое или нулевое давление. Непосредственное измерение давления также дает возможность оператору выявлять и исправлять ситуации данного типа.
Хотя иконка 84 на фиг.3 представляет параметры и угла изгиба наконечника, и давления, в дополнение к местоположению наконечника катетера, примеры, описанные выше, показывают, что может быть полезно отображать отдельно либо угол, либо давление. Дополнительно или в качестве альтернативы, измерение угла и измерение давления - оба или одно из них - могут отображаться вместе с измерениями электрического контактного сопротивления или другими параметрами. Более того, хотя фиг.3 показывает частный случай режима графического представления, другие методики отображения данных об угле и давлении будут очевидны для специалистов в данной области техники и будут учтены в объеме настоящего изобретения. Методики отображения, которые описываются или предлагаются выше, могут применяться не только в процедурах катетеризации сердца, но также в инвазивных диагностических и терапевтических способах применения других типов.
Таким образом, будет оценено то, что варианты осуществления, описанные выше, приводятся в качестве примера и что настоящее изобретение не ограничивается тем, что было, в частности, показано и описано выше. Точнее, объем настоящего изобретения включает в себя и комбинации, и части комбинаций разнообразных особенностей, описываемых выше, а также их разновидности и модификации, которые могут иметь место у специалистов в данной области после прочтения вышеизложенного описания и которые не раскрываются в известном уровне техники.
Группа изобретений относится к медицине. Способ отображения информации осуществляют с помощью устройства для проведения медицинской процедуры. Устройство содержит процессор и экран дисплея для наблюдения оператором за инвазивным зондом внутри тела объекта. Процессор выполнен с возможностью подсоединения к инвазивному зонду для получения измерений параметров зонда и для отображения на экране дисплея иконки, соответствующей измерениям. При этом получают в отношении инвазивного зонда внутри тела объекта измерения параметров зонда. Параметры состоят из угла изгиба зонда и давления на зонд. В соответствии с измерениями отображают на экране дисплея иконку, представляющую для наблюдения оператором зонда как угол изгиба зонда, так и давление на зонд. Достигается повышение точности позиционирования инвазивного зонда и обеспечение эффективности и безопасности диагностических и/или терапевтических процедур, проводимых с помощью зонда. 3 н. и 14 з.п. ф-лы, 3 ил.
1. Способ отображения информации, включающий в себя этапы, на которых:
получают в отношении инвазивного зонда внутри тела объекта измерения параметров зонда, состоящих из угла изгиба зонда и давления на зонд; и
в соответствии с измерениями отображают на экране дисплея иконку, представляющую для наблюдения оператором зонда как угол изгиба зонда, так и давление на зонд.
2. Способ по п. 1, в котором зонд содержит дистальный наконечник, изгибающийся в упругом соединении, и в котором этап получения измерения включает в себя измерение деформации соединения вследствие зацепления ткани в теле дистальным наконечником.
3. Способ по п. 2, в котором зонд содержит катетер, который вводится в полость сердца объекта и захватывает ткань сердечной мышцы.
4. Способ по п. 3, дополнительно включающий в себя этап, на котором прилагают энергию через дистальный наконечник для абляции ткани сердечной мышцы, при этом оператор контролирует приложение энергии в соответствии с иконкой.
5. Способ по п. 2, в котором этап измерения деформации включает в себя распознавание как деформации соединения, так и позиции зонда внутри тела путем передачи и приема одного или нескольких магнитных полей.
6. Способ по п. 1, в котором этап отображения иконки содержит размещение иконки на экране дисплея для представления местонахождения зонда внутри тела.
7. Способ по п. 6, в котором этап размещения иконки включает в себя расположение иконки на экране дисплея относительно карты поверхности органа тела и в котором этап получения измерения содержит измерение давления между зондом и поверхностью.
8. Способ по п. 1, в котором иконка выполнена с возможностью поворота для показа угла изгиба и окрашивания для представления давления.
9. Устройство для проведения медицинской процедуры, содержащее:
экран дисплея для наблюдения оператором за инвазивным зондом внутри тела объекта; и
процессор, выполненный с возможностью подсоединения к инвазивному зонду для получения измерений в отношении инвазивного зонда параметров зонда, состоящих из угла изгиба зонда и давления на зонд, и для отображения на экране дисплея иконки, соответствующей измерениям и представляющей как угол изгиба, так и давление на зонд.
10. Устройство по п. 9, дополнительно содержащее инвазивный зонд, причем зонд включает в себя дистальный наконечник, изгибающийся в упругом соединении, и процессор сконфигурирован для измерения деформации соединения вследствие зацепления ткани в теле дистальным наконечником.
11. Устройство по п. 10, в котором зонд содержит катетер для введения в полость сердца объекта с целью захвата ткани сердечной мышцы.
12. Устройство по п. 11, в котором катетер выполнен с возможностью приложения энергии через дистальный наконечник для абляции ткани сердечной мышцы, при этом оператор контролирует приложение энергии в соответствии с иконкой.
13. Устройство по п. 10, дополнительно содержащее по меньшей мере один генератор магнитного поля для создания магнитного поля вблизи зонда, в котором процессор сконфигурирован для измерения как деформации соединения, так и позиции зонда внутри тела, в соответствии с магнитным полем.
14. Устройство по п. 9, в котором процессор сконфигурирован для размещения иконки на экране дисплея для представления местоположения зонда внутри тела.
15. Устройство по п. 14, в котором процессор сконфигурирован для создания карты поверхности органа тела, расположения иконки на экране дисплея относительно карты и измерения давления между зондом и поверхностью.
16. Устройство по п. 9, в котором иконка выполнена с возможностью поворота для показа угла изгиба и окрашивания для представления давления.
17. Машиночитаемый носитель, на котором хранятся программные инструкции, которые, при считывании компьютером, инициируют получение компьютером измерений в отношении инвазивного зонда внутри тела объекта, состоящих из угла изгиба зонда и давления на зонд, и отображение, в соответствии с измерениями, на экране дисплея иконки, представляющей для наблюдения оператором как угол изгиба, так и давление инвазивного зонда.
| KANAGARATNAM P | |||
| et al | |||
| Experience of robotic catheter ablation in humans using a novel remotely steerable catheter sheath | |||
| J Interv Card Electrophysiol, 2008, N 21, pp | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 2001047129 A1, 29.11.2001 | |||
| US 5769843 A, 23.06.1998 | |||
| WO 2008053402 A1, 08.05.2008 | |||
| RU 2004123459 A, 27.03.2005 | |||
| ГИБКОЕ ВЗРЫВОЗАЩИЩЕННОЕ ВИБРОЗАЩИТНОЕ УПЛОТНЕНИЕ | 1992 |
|
RU2047797C1 |
| US 2007197939 A1, 23.08.2007 | |||
| US 2004097806 A1, 20.05.2004. | |||

